WO2023047486A1 - 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 - Google Patents
電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 Download PDFInfo
- Publication number
- WO2023047486A1 WO2023047486A1 PCT/JP2021/034793 JP2021034793W WO2023047486A1 WO 2023047486 A1 WO2023047486 A1 WO 2023047486A1 JP 2021034793 W JP2021034793 W JP 2021034793W WO 2023047486 A1 WO2023047486 A1 WO 2023047486A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- frequency
- pulsation
- current
- power supply
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
Definitions
- the present disclosure relates to a power conversion device that supplies AC power to a motor that drives a load, a motor drive device, and a refrigeration cycle application device.
- a power conversion device consists of a converter that rectifies the power supply voltage applied from an AC power supply, a capacitor that is connected to the output end of the converter, and an inverter that converts the DC voltage output from the capacitor into an AC voltage and applies it to the electric motor. , provided.
- Patent Document 1 discloses a technique for suppressing an increase in power consumption by appropriately compensating for torque pulsation, which is the pulsating component of the load torque, according to the state of the electric motor that drives the compressor.
- Patent Document 1 does not consider harmonics of the power supply current. For this reason, if the technique of Patent Document 1 is used to generate a compensating component for the torque ripple of the electric motor at a frequency that is asynchronous with the power supply frequency, the power supply current will be in an unbalanced state between the positive and negative polarities of the power supply current. There is a problem that the harmonic component of the power supply current increases.
- the present disclosure has been made in view of the above, and aims to obtain a power conversion device capable of suppressing an increase in harmonic components of power supply current.
- the power conversion device is a power conversion device that supplies AC power to a motor that drives a load.
- a power conversion device includes a converter that rectifies a power supply voltage applied from an AC power supply, and a capacitor that is connected to an output terminal of the converter.
- the power converter includes an inverter connected across the capacitor, and a control device that controls the operation of the inverter. The control device performs control to reduce pulsation of the capacitor output current that is output from the capacitor to the inverter when the load is driven.
- the power converter according to the present disclosure it is possible to suppress an increase in harmonic components of the power supply current.
- FIG. 1 is a diagram showing a configuration example of a power converter according to Embodiment 1;
- FIG. FIG. 2 is a diagram showing a configuration example of an inverter included in the power converter according to Embodiment 1;
- FIG. 2 is a block diagram showing a configuration example of a control device included in the power conversion device according to Embodiment 1;
- the first diagram for explaining the problem of the present application A second diagram for explaining the problem of the present application
- FIG. 3 is a block diagram showing a configuration example of a voltage command value calculation unit included in the control device according to Embodiment 1;
- 4 is a block diagram showing a configuration example of a ⁇ -axis current command value generation unit provided in the voltage command value calculation unit according to Embodiment 1;
- FIG. 4 is a block diagram showing a first configuration example of a capacitor output current control section included in the voltage command value calculation section according to the first embodiment;
- FIG. 4 is a block diagram showing a second configuration example of the capacitor output current control section included in the voltage command value calculation section according to the first embodiment;
- FIG. 4 is a diagram for explaining the effect of the pulsation reduction control according to the first embodiment;
- FIG. FIG. 2 is a diagram showing an example of a hardware configuration that implements a control device included in the power conversion device according to Embodiment 1;
- FIG. 1 is a diagram showing a configuration example of a power conversion device 2 according to Embodiment 1.
- FIG. 2 is a diagram showing a configuration example of the inverter 30 included in the power conversion device 2 according to Embodiment 1.
- the power converter 2 is connected to the AC power supply 1 and the compressor 8 .
- the compressor 8 is an example of a load that has a characteristic that the load torque periodically fluctuates when it is driven.
- the compressor 8 has an electric motor 7 .
- An example of the motor 7 is a three-phase permanent magnet synchronous motor.
- the power converter 2 converts the power supply voltage applied from the AC power supply 1 into an AC voltage having a desired amplitude and phase, and applies the AC voltage to the electric motor 7 .
- the power conversion device 2 includes a reactor 4 , a converter 10 , a capacitor 20 , an inverter 30 , a voltage detection section 82 , a current detection section 84 and a control device 100 .
- An electric motor driving device 50 is configured by the power conversion device 2 and the electric motor 7 included in the compressor 8 .
- the converter 10 has four diodes D1, D2, D3 and D4. Four diodes D1 to D4 are bridge-connected to form a rectifier circuit. Converter 10 rectifies the power supply voltage applied from AC power supply 1 by means of a rectifier circuit composed of four diodes D1 to D4. In converter 10 , one end on the input side is connected to AC power supply 1 via reactor 4 , and the other end on the input side is connected to AC power supply 1 . Also, in the converter 10 , the output side is connected to the capacitor 20 .
- the converter 10 may have a rectifying function as well as a boosting function for boosting the rectified voltage.
- a converter having a boosting function can be configured with one or more transistor elements or one or more switching elements in which a transistor element and a diode are connected in anti-parallel in addition to or instead of a diode. Note that the arrangement and connection of transistor elements or switching elements in a converter having a boosting function are well known, and description thereof will be omitted here.
- the capacitor 20 is connected to the output end of the converter 10 via DC buses 22a and 22b.
- the DC bus 22a is a positive side DC bus
- the DC bus 22b is a negative side DC bus.
- Capacitor 20 smoothes the rectified voltage applied from converter 10 .
- Examples of the capacitor 20 include an electrolytic capacitor, a film capacitor, and the like.
- the inverter 30 is connected across the capacitor 20 via DC buses 22a and 22b.
- the inverter 30 converts the DC voltage smoothed by the capacitor 20 into AC voltage for the compressor 8 and applies it to the electric motor 7 of the compressor 8 .
- the voltage applied to the electric motor 7 is a three-phase AC voltage with variable frequency and voltage value.
- the inverter 30 includes an inverter main circuit 310 and a drive circuit 350, as shown in FIG.
- the inverter main circuit 310 includes switching elements 311-316. Freewheeling rectifying elements 321 to 326 are connected in anti-parallel to the switching elements 311 to 316, respectively.
- the switching elements 311 to 316 are assumed to be IGBTs (Insulated Gate Bipolar Transistors), MOSFETs (Metal-Oxide-Semiconductor Field-Effect Transistors), etc., but elements capable of switching If so, you can use whatever you want.
- the switching elements 311 to 316 are MOSFETs, the MOSFETs have parasitic diodes due to their structure, so that the same effect can be obtained without connecting the freewheeling rectifying elements 321 to 326 in anti-parallel.
- switching elements 311 to 316 not only silicon (Si) but also wide bandgap semiconductors such as silicon carbide (SiC), gallium nitride (GaN), and diamond may be used. By forming switching elements 311 to 316 using a wide bandgap semiconductor, loss can be further reduced.
- the drive circuit 350 generates drive signals Sr1-Sr6 based on PWM (Pulse Width Modulation) signals Sm1-Sm6 output from the control device 100.
- PWM Pulse Width Modulation
- the drive circuit 350 controls on/off of the switching elements 311-316 by the drive signals Sr1-Sr6.
- the inverter 30 can apply the frequency-variable and voltage-variable three-phase AC voltage to the electric motor 7 via the output lines 331 to 333 .
- the PWM signals Sm1 to Sm6 are signals having a signal level of a logic circuit, for example, a magnitude of 0V to 5V.
- the PWM signals Sm1 to Sm6 are signals having the ground potential of the control device 100 as a reference potential.
- the driving signals Sr1 to Sr6 are signals having voltage levels necessary to control the switching elements 311 to 316, eg, -15V to +15V.
- the drive signals Sr1 to Sr6 are signals having the potential of the negative terminal, that is, the emitter terminal of the corresponding switching element as a reference potential.
- the voltage detection unit 82 detects the voltage across the capacitor 20 to detect the bus voltage Vdc.
- the bus voltage Vdc is the voltage between the DC buses 22a and 22b.
- the voltage detection unit 82 includes, for example, a voltage dividing circuit that divides the voltage with series-connected resistors.
- the voltage detection unit 82 converts the detected bus voltage Vdc into a voltage suitable for processing in the control device 100 using a voltage dividing circuit, for example, a voltage of 5 V or less, and outputs it to the control device 100 as a voltage detection signal that is an analog signal.
- the voltage detection signal output from the voltage detection unit 82 to the control device 100 is converted from an analog signal to a digital signal by an AD (Analog to Digital) conversion unit (not shown) in the control device 100, and is subjected to internal processing in the control device 100. Used.
- AD Analog to Digital
- the current detector 84 has a shunt resistor inserted in the DC bus 22b.
- a current detector 84 detects the capacitor output current idc using a shunt resistor.
- a capacitor output current idc is an input current to the inverter 30 , that is, a current output from the capacitor 20 to the inverter 30 .
- the current detection unit 84 outputs the detected capacitor output current idc to the control device 100 as a current detection signal, which is an analog signal.
- a current detection signal output from the current detection unit 84 to the control device 100 is converted from an analog signal to a digital signal by an AD conversion unit (not shown) in the control device 100 and used for internal processing in the control device 100 .
- the control device 100 controls the operation of the inverter 30 by generating the PWM signals Sm1 to Sm6 described above. Specifically, the control device 100 changes the angular frequency ⁇ e and the voltage value of the output voltage of the inverter 30 based on the PWM signals Sm1 to Sm6.
- the angular frequency ⁇ e of the output voltage of the inverter 30 determines the rotational angular velocity of the electric motor 7 in electrical angle.
- this rotational angular velocity is also represented by the same symbol ⁇ e.
- the rotational angular velocity ⁇ m of the electric motor 7 in the mechanical angle is equal to the rotational angular velocity ⁇ e of the electric motor 7 in the electrical angle divided by the pole logarithm P. Therefore, there is a relationship represented by the following equation (1) between the rotational angular velocity ⁇ m of the electric motor 7 in mechanical angle and the angular frequency ⁇ e of the output voltage of the inverter 30 .
- the rotational angular velocity is sometimes simply referred to as "rotational velocity”
- the angular frequency is simply referred to as "frequency”.
- FIG. 3 is a block diagram showing a configuration example of the control device 100 included in the power conversion device 2 according to Embodiment 1. As shown in FIG.
- the control device 100 includes an operation control section 102 and an inverter control section 110 .
- the operation control unit 102 receives command information Qe from the outside and generates a frequency command value ⁇ e* based on this command information Qe.
- the frequency command value ⁇ e* can be obtained by multiplying the rotational speed command value ⁇ m*, which is the command value of the rotational speed of the electric motor 7, by the number of pole pairs P, as shown in the following equation (2).
- the control device 100 controls the operation of each part of the air conditioner based on the command information Qe.
- the command information Qe is, for example, a temperature detected by a temperature sensor (not shown), information indicating a set temperature instructed from a remote controller (not shown), operation mode selection information, operation start/end instruction information, and the like. be.
- the operation modes are, for example, heating, cooling, and dehumidification.
- the operation control unit 102 may be outside the control device 100 . That is, the control device 100 may be configured to acquire the frequency command value ⁇ e* from the outside.
- Inverter control unit 110 includes current restoration unit 111, 3-phase 2-phase conversion unit 112, ⁇ -axis current command value generation unit 113, voltage command value calculation unit 115, electrical phase calculation unit 116, 2-phase 3-phase A converter 117 and a PWM signal generator 118 are provided.
- the current restoration unit 111 restores the phase currents iu, iv, and iw flowing through the electric motor 7 based on the capacitor output current idc detected by the current detection unit 84 .
- the current restoration unit 111 samples the detected value of the capacitor output current idc detected by the current detection unit 84 at timing determined based on the PWM signals Sm1 to Sm6 generated by the PWM signal generation unit 118.
- the currents iu, iv, iw can be restored.
- current detectors may be provided on the output lines 331 to 333 to directly detect the phase currents iu, iv, and iw and input them to the three-to-two-phase converter 112 . In this configuration, the current restoration section 111 is unnecessary.
- the three-phase to two-phase conversion unit 112 converts the phase currents iu, iv, and iw restored by the current restoration unit 111 into the ⁇ axis, which is the excitation current, using the electric phase ⁇ e generated by the electric phase calculation unit 116, which will be described later.
- the current i ⁇ and the ⁇ -axis current i ⁇ , which is the torque current, are converted into ⁇ - ⁇ axis current values.
- a ⁇ -axis current command value generation unit 113 generates a ⁇ -axis current command value i ⁇ *, which is an exciting current command value, based on the ⁇ -axis current i ⁇ . More specifically, the ⁇ -axis current command value generation unit 113 obtains the current phase angle at which the output torque of the electric motor 7 is equal to or higher than the set value or the maximum value based on the ⁇ -axis current i ⁇ , and the calculated current phase angle is Based on this, the ⁇ -axis current command value i ⁇ * is calculated. Note that the motor current flowing through the electric motor 7 may be used instead of the output torque of the electric motor 7 . In this case, the ⁇ -axis current command value i ⁇ * is calculated based on the current phase angle at which the motor current flowing through the motor 7 is the set value or less or the minimum value.
- FIG. 3 shows a configuration in which the ⁇ -axis current command value i ⁇ * is obtained based on the ⁇ -axis current i ⁇ , it is not limited to this configuration.
- the ⁇ -axis current command value i ⁇ * may be obtained based on the ⁇ -axis current i ⁇ instead of the ⁇ -axis current i ⁇ .
- the ⁇ -axis current command value generator 113 may determine the ⁇ -axis current command value i ⁇ * by flux-weakening control.
- the voltage command value calculation unit 115 calculates the frequency command value ⁇ e* obtained from the operation control unit 102, the ⁇ -axis current i ⁇ and the ⁇ -axis current i ⁇ obtained from the three-phase to two-phase conversion unit 112, and the ⁇ -axis current command value generation unit. Based on the ⁇ -axis current command value i ⁇ * acquired from 113, the ⁇ -axis voltage command value V ⁇ * and the ⁇ -axis voltage command value V ⁇ * are generated. Furthermore, the voltage command value calculator 115 estimates the frequency estimation value ⁇ est based on the ⁇ -axis voltage command value V ⁇ *, the ⁇ -axis voltage command value V ⁇ *, the ⁇ -axis current i ⁇ , and the ⁇ -axis current i ⁇ . .
- the electrical phase calculator 116 calculates the electrical phase ⁇ e by integrating the frequency estimation value ⁇ est acquired from the voltage command value calculator 115 .
- the two-to-three phase conversion unit 117 converts the ⁇ -axis voltage command value V ⁇ * and the ⁇ -axis voltage command value V ⁇ * acquired from the voltage command value calculation unit 115, that is, the voltage command values in the two-phase coordinate system, to the electric phase calculation unit 116. are converted into three-phase voltage command values Vu*, Vv*, Vw*, which are output voltage command values in a three-phase coordinate system, using the electric phase ⁇ e obtained from .
- the PWM signal generator 118 compares the three-phase voltage command values Vu*, Vv*, Vw* acquired from the two-to-three-phase converter 117 with the bus voltage Vdc detected by the voltage detector 82. PWM signals Sm1 to Sm6 are generated. The PWM signal generator 118 can also stop the electric motor 7 by not outputting the PWM signals Sm1 to Sm6.
- 4 and 5 are first and second diagrams, respectively, for explaining the problem of the present application.
- the problem of the present application was briefly described in the section [Problems to be Solved by the Invention], but a more detailed description will be added here.
- vibration suppression control when the load is a load having torque pulsation, such as a single rotary compressor, a scroll compressor, or a twin rotary compressor, control is performed to compensate for this torque pulsation, as described in the Background Art section.
- This control is also called “vibration suppression control”.
- the inverter 30 is controlled by generating a torque current compensation value so that the output torque of the electric motor 7 follows torque pulsation.
- this control is simply performed, as explained in the section [Problems to be Solved by the Invention], the capacitor output current idc becomes unbalanced between the positive and negative power supply currents. A problem arises in that the harmonic components of are increased.
- FIGS. 4 and 5 show the waveforms of the power supply voltage Vin, the power supply current Iin, and the capacitor output current idc in order from the top.
- the horizontal axes in FIGS. 4 and 5 represent time.
- the peak value of the positive side waveform and the peak value of the negative side waveform of the power supply current Iin are different, that is, the peak value is unbalanced between the positive and negative polarities of the power supply current Iin. It is shown.
- pulsation occurs in the capacitor output current idc as shown in the lower part.
- the power supply current Iin contains many harmonic components.
- the inventors of the present application have found that the pulsation of the capacitor output current idc increases as the load torque increases and the inertia of the load decreases. It is also, the inventors of the present application have found that the pulsation of the capacitor output current idc is greater in the single rotary compressor than in the twin rotary compressor and the scroll compressor.
- the lower part of FIG. 5 shows an ideal state in which the capacitor output current idc is constant. In such an ideal state, as shown in the middle part of FIG. imbalance does not occur. Therefore, the harmonic components that can be included in the power supply current Iin are much smaller than in the case of FIG.
- voltage command value calculation unit 115 included in control device 100 performs control to reduce pulsation of capacitor output current idc when the load is driven.
- a specific configuration is as shown in FIGS. 6 and 7. FIG.
- FIG. 6 is a block diagram showing a configuration example of voltage command value calculation section 115 included in control device 100 according to the first embodiment.
- voltage command value calculation unit 115 includes frequency estimation unit 501, subtraction units 502, 509, 510, ⁇ -axis current command value generation unit 503, capacitor output current control unit 504, ⁇ -axis A current control unit 511 and a ⁇ -axis current control unit 512 are provided.
- FIG. 7 is a block diagram showing a configuration example of ⁇ -axis current command value generation section 503 included in voltage command value calculation section 115 according to the first embodiment. Note that FIG. 7 also shows a subtraction unit 502 positioned before the ⁇ -axis current command value generation unit 503 .
- Frequency estimator 501 estimates the frequency of the voltage applied to electric motor 7 based on ⁇ -axis current i ⁇ , ⁇ -axis current i ⁇ , ⁇ -axis voltage command value V ⁇ *, and ⁇ -axis voltage command value V ⁇ *. and outputs the estimated frequency as the frequency estimation value ⁇ est.
- the subtraction unit 502 calculates the difference ( ⁇ e* ⁇ est) between the frequency command value ⁇ e* and the frequency estimation value ⁇ est estimated by the frequency estimation unit 501 .
- a capacitor output current control unit 504 generates a ⁇ -axis current compensation value i ⁇ _lcc* based on the capacitor output current idc acquired from the current detection unit 84 .
- the ⁇ -axis current compensation value i ⁇ _lcc* is a control amount component for reducing the ripple component of the capacitor output current idc. Details of the ⁇ -axis current compensation value i ⁇ _lcc* will be described later.
- the capacitor output current control unit is sometimes simply called “current control unit”
- the ⁇ -axis current compensation value is sometimes simply called "current compensation value”.
- a ⁇ -axis current command value generation unit 503 generates a ⁇ -axis current command value i ⁇ **, which is a torque current command value in a rotating coordinate system. More specifically, the ⁇ -axis current command value generating unit 503 performs proportional integral calculation, that is, PI (Proportional Integral) control on the difference ( ⁇ e* ⁇ est) calculated by the subtracting unit 502 to obtain the difference A ⁇ -axis current command value i ⁇ * that brings ( ⁇ e* ⁇ est) close to zero is obtained.
- PI Proportional Integral
- the ⁇ -axis current command value generation unit 503 generates the ⁇ -axis current command value i ⁇ * based on the ⁇ -axis current command value i ⁇ * and the ⁇ -axis current compensation value i ⁇ _lcc* acquired from the capacitor output current control unit 504. A corrected or compensated ⁇ -axis current command value i ⁇ ** is generated and output.
- FIG. 7 shows a configuration example of the ⁇ -axis current command value generating section 503.
- the ⁇ -axis current command value generator 503 includes a speed controller 610 and a compensator 620 .
- Speed control unit 610 is a control unit that generates a current command value based on the frequency deviation.
- the speed control section 610 includes a proportional control section 611 , an integral control section 612 and an addition section 613 , and the compensation section 620 includes an addition section 621 .
- proportional control unit 611 performs proportional control on the difference ( ⁇ e*- ⁇ est) between frequency command value ⁇ e* and frequency estimated value ⁇ est obtained from subtraction unit 502, and proportional term i ⁇ _p* to output
- the integral control unit 612 performs integral control on the difference ( ⁇ e* ⁇ est) between the frequency command value ⁇ e* and the frequency estimated value ⁇ est obtained from the subtraction unit 502, and outputs an integral term i ⁇ _i*.
- the addition unit 613 adds the proportional term i ⁇ _p* obtained from the proportional control unit 611 and the integral term i ⁇ _i* obtained from the integral control unit 612 to generate the ⁇ -axis current command value i ⁇ *.
- Addition unit 621 adds ⁇ -axis current command value i ⁇ * generated by speed control unit 610 and ⁇ -axis current compensation value i ⁇ _lcc* obtained from capacitor output current control unit 504 to obtain ⁇ -axis current command value i ⁇ Generate **.
- the ⁇ -axis current command value i.delta.* is called “first .delta.-axis current command value” and the .delta.-axis current command value i.delta.** is called “second .delta.-axis current command value.”
- the ⁇ -axis current command value generation unit 503 performs control for suppressing pulsation of the capacitor output current idc while matching the frequency estimation value ⁇ est with the frequency command value ⁇ e*.
- the subtraction unit 509 calculates the difference (i ⁇ *-i ⁇ ) between the ⁇ -axis current command value i ⁇ * and the ⁇ -axis current i ⁇ .
- Subtraction unit 510 calculates a difference (i ⁇ **-i ⁇ ) between ⁇ -axis current command value i ⁇ ** and ⁇ -axis current i ⁇ .
- the ⁇ -axis current control unit 511 performs a proportional integral operation on the difference (i ⁇ * ⁇ i ⁇ ) calculated by the subtraction unit 509 to bring the difference (i ⁇ * ⁇ i ⁇ ) closer to zero. to generate The ⁇ -axis current control unit 511 generates such a ⁇ -axis voltage command value V ⁇ * to perform control so that the ⁇ -axis current i ⁇ matches the ⁇ -axis current command value i ⁇ *.
- a ⁇ -axis current control unit 512 performs a proportional integral operation on the difference (i ⁇ **-i ⁇ ) calculated by the subtraction unit 510 to obtain a ⁇ -axis voltage command value that brings the difference (i ⁇ **-i ⁇ ) closer to zero. Generate V ⁇ *.
- the ⁇ -axis current control unit 512 generates such a ⁇ -axis voltage command value V ⁇ * to perform control so that the ⁇ -axis current i ⁇ matches the ⁇ -axis current command value i ⁇ **.
- the ⁇ -axis current command value i ⁇ ** input to the ⁇ -axis current control unit 512 includes the ⁇ -axis current compensation value i ⁇ _lcc* obtained from the capacitor output current control unit 504 .
- the ⁇ -axis current control unit 512 controls the inverter 30 based on the ⁇ -axis voltage command value V ⁇ * generated based on the ⁇ -axis current compensation value i ⁇ _lcc*, thereby suppressing the pulsation of the capacitor output current idc. can be done.
- FIG. 8 is a block diagram showing a first configuration example of capacitor output current control section 504 included in voltage command value calculation section 115 according to the first embodiment.
- the capacitor output current control unit 504 includes a calculation unit 550, a cosine calculation unit 551, a sine calculation unit 552, multiplication units 553, 554, 561, 562, low-pass filters 555, 556, subtraction units 557, 558, It includes frequency control units 559 and 560 and an addition unit 563 .
- the computing unit 550 computes the phase angle ⁇ x with respect to the frequency ⁇ x of the pulsating component of interest in the capacitor output current idc.
- the pulsating component of interest is the pulsating component to be reduced among the plurality of pulsating components included in the capacitor output current idc.
- the phase angle ⁇ x is determined by the frequency ⁇ x of the pulsating component to be reduced, the clock frequency of the processor that performs the processing, and the like.
- the cosine calculator 551 calculates the cosine value cos ⁇ x based on the phase angle ⁇ x.
- the sine calculator 552 calculates a sine value sin ⁇ x based on the phase angle ⁇ x.
- the multiplier 553 multiplies the capacitor output current idc by the cosine value cos ⁇ x to calculate the cosine component idc ⁇ cos ⁇ x of the capacitor output current idc.
- the multiplier 554 multiplies the capacitor output current idc by the sine value sin ⁇ x to calculate the sine component idc ⁇ sin ⁇ x of the capacitor output current idc.
- the cosine component idc ⁇ cos ⁇ x and the sine component idc ⁇ sin ⁇ x calculated by the multipliers 553 and 554 include a pulsation component with a frequency of ⁇ x and a pulsation component with a frequency higher than ⁇ x, that is, a harmonic component. ing.
- the low-pass filters 555 and 556 are first-order lag filters whose transfer function is represented by 1/(1+s ⁇ Tf). s is the Laplacian operator and Tf is the time constant. The time constant Tf is determined so as to remove pulsation components with frequencies higher than the frequency ⁇ x. Note that "removal” includes the case where part of the pulsation component is attenuated, that is, reduced.
- the time constant Tf is set by the operation control unit 102 based on the speed command value, and may be notified to the low-pass filters 555 and 556 by the operation control unit 102, or may be held by the low-pass filters 555 and 556. .
- a first-order lag filter is an example, and a moving average filter or the like may be used, and the type of filter is not limited as long as the pulsation component on the high frequency side can be removed.
- a low-pass filter 555 performs low-pass filtering on the cosine component idc ⁇ cos ⁇ x, removes frequency components higher than the frequency ⁇ x, and outputs a low frequency component idc_c.
- the low-frequency component idc_c is a cosine component with a frequency of ⁇ x among the ripple components of the capacitor output current idc.
- a low-pass filter 556 performs low-pass filtering on the sine component idc ⁇ sin ⁇ x, removes frequency components higher than the frequency ⁇ x, and outputs a low frequency component idc_s.
- the low-frequency component idc_s is a sinusoidal component with a frequency of ⁇ x among the ripple components of the capacitor output current idc.
- the subtraction unit 557 calculates the difference (idc_c-0) between the low frequency component idc_c output from the low-pass filter 555 and zero.
- the subtraction unit 558 calculates the difference (idc_s ⁇ 0) between the low frequency component idc_s output from the low-pass filter 556 and zero.
- the frequency control unit 559 performs an integral operation on the difference (idc_c-0) calculated by the subtraction unit 557 to calculate the cosine component i ⁇ _trq_c of the current command value that brings the difference (idc_c-0) closer to zero. By generating the cosine component i ⁇ _trq_c in this manner, the frequency control unit 559 performs control to match the low frequency component idc_c to zero.
- the integral calculation here is an example, and a proportional integral calculation may be performed instead of the integral calculation.
- the frequency control unit 560 performs an integral operation on the difference (idc_s-0) calculated by the subtraction unit 558 to calculate the sine component i ⁇ _trq_s of the current command value that brings the difference (idc_s-0) close to zero.
- the frequency control unit 560 generates the sine component i ⁇ _trq_s in this way, thereby performing control to match the low frequency component idc_s to zero.
- the integral calculation here is an example, and a proportional integral calculation may be performed instead of the integral calculation.
- the multiplier 561 multiplies the cosine component i ⁇ _trq_c output from the frequency control unit 559 by the cosine value cos ⁇ x to generate i ⁇ _trq_c ⁇ cos ⁇ x.
- the multiplier 562 multiplies the sine component i ⁇ _trq_s output from the frequency control unit 560 by the sine value sin ⁇ x to generate i ⁇ _trq_s ⁇ sin ⁇ x.
- the addition unit 563 obtains the sum of i ⁇ _trq_c ⁇ cos ⁇ x output from the multiplication unit 561 and i ⁇ _trq_s ⁇ sin ⁇ x output from the multiplication unit 562 .
- the capacitor output current control unit 504 outputs the value obtained by the adding unit 563 as the ⁇ -axis current compensation value i ⁇ _lcc*.
- control device 100 performs control to reduce pulsation of the capacitor output current idc output from the capacitor 20 to the inverter 30 when the compressor 8 is driven. With this control, it is possible to avoid an unbalanced state between the positive and negative polarities of the power supply current Iin. This makes it possible to suppress an increase in harmonic components that may be included in the power supply current Iin.
- the motor power which is the power applied from the inverter 30 to the electric motor 7, is represented by Pm.
- This motor power Pm can be expressed by the following equation (3).
- V ⁇ i ⁇ +V ⁇ i ⁇ (Ra i ⁇ - ⁇ e L ⁇ i ⁇ ) i ⁇ + ⁇ Ra ⁇ i ⁇ + ⁇ e (L ⁇ ⁇ i ⁇ + ⁇ a) ⁇ ⁇ i ⁇ ...(3)
- V ⁇ ⁇ -axis voltage in electric motor 7
- V ⁇ ⁇ -axis voltage in electric motor 7
- i ⁇ ⁇ -axis current flowing in electric motor 7
- Ra phase resistance in electric motor 7
- ⁇ e frequency of output voltage of inverter 30 (electrical angle)
- L ⁇ ⁇ -axis inductance in the electric motor 7
- L ⁇ ⁇ -axis inductance in the electric motor 7
- ⁇ a Induced voltage constant in the electric motor 7
- the mechanical 1f component is the most dominant frequency component among the pulsating components contained in the capacitor output current idc.
- the mechanical 1f component is one times the mechanical angular frequency of the electric motor 7, that is, a mechanical angular frequency component.
- the pulsation component that depends on the mechanical angular frequency of the electric motor 7 and the power supply frequency, which is the frequency of the power supply voltage Vin, also increases.
- the frequency of this pulsating component can be expressed by the following equation (6).
- the dominant component of the bus voltage Vdc is the component twice the power supply frequency. This component is denoted as "power supply 2f". Therefore, when the mechanical 1f component is removed, the following components are large pulsating components.
- " represents the absolute value of the numerical value a.
- the components that greatly affect the harmonics of the power supply current Iin are the components with large absolute values and the components with low frequencies.
- the mechanical 2f component increases as the rotation speed increases, and the
- the lower the frequency the greater the effect of contributing to the harmonics of the power supply current Iin. Therefore, if there is a limit to the number of pulsation components to be reduced, the frequency components to be reduced are changed according to the rotation speed. For example, when the number of pulsation components to be reduced is two, the control device 100 reduces the following pulsation components.
- FIG. 8 shows a configuration example of capacitor output current control section 504 when the number of pulsating components to be reduced is one. can.
- FIG. 9 is a block diagram showing a second configuration example of capacitor output current control section 504 included in voltage command value calculation section 115 according to the first embodiment. Note that FIG. 9 shows a configuration example in which the number of pulsation components to be reduced is three.
- the first ⁇ -axis current compensation value i ⁇ m1f* is calculated based on the phase angle ⁇ m1f of the pulsation component of the machine 1f.
- the second ⁇ -axis current compensation value i ⁇ m2f* is calculated based on the phase angle ⁇ m2f of the pulsating component of the machine 2f.
- the first ⁇ -axis current compensation value i ⁇ m1f*, the second ⁇ -axis current compensation value i ⁇ m2f*, and the third ⁇ -axis current compensation value i ⁇ y* are added in an adder 564 to obtain the ⁇ -axis current compensation value i ⁇ _lcc*. is output as
- FIG. 9 shows a case where the number of pulsation components to be reduced is three, the number is not limited to three. Even when the number of pulsating components to be reduced is 2 or 4 or more, as in FIG. 9, a control system for generating the ⁇ -axis current compensation value i ⁇ _lcc* is configured in parallel and added at the final stage. It can be realized by
- FIG. 10 is a diagram for explaining the effect of the pulsation reduction control according to Embodiment 1.
- FIG. The left part of FIG. 10 shows the waveforms of the power supply current and the capacitor output current when the capacitor output current control unit 504 is not provided in the voltage command value calculation unit 115 of FIG.
- the right part of FIG. 10 shows the waveforms of the power supply current and the capacitor output current when the capacitor output current control unit 504 is provided, that is, when the voltage command value calculation unit 115 of FIG. 6 is used.
- the pulsation of the capacitor output current is large, as shown in the left part of FIG. It is shown that this causes the peak value of the power supply current to fluctuate and the harmonic components contained in the power supply current to increase.
- the capacitor output current control section 504 when the capacitor output current control section 504 is provided, the pulsation of the capacitor output current is reduced as shown in the right part of FIG. It is shown that this makes the peak value of the power supply current substantially constant and reduces the harmonic components contained in the power supply current.
- the power converter according to Embodiment 1 performs control to reduce pulsation of the capacitor output current output from the capacitor to the inverter when driving the load.
- This control avoids an unbalanced state between the positive and negative polarities of the power supply current. This makes it possible to suppress an increase in harmonic components that may be included in the power supply current.
- the unbalanced state between the positive and negative sides of the power supply current is suppressed, it becomes easier to comply with the power supply harmonic standard. This eliminates the need to change or modify the circuit constants of the converter and the switching method of the converter, making it possible to obtain an inexpensive and highly reliable electric motor drive device.
- the power factor of the power supply increases due to the reduction of the harmonics of the power supply, it is no longer necessary to flow wasteful current. As a result, efficiency on the converter side can be increased, and a highly efficient electric motor drive device can be obtained.
- the control device performs control to reduce at least the pulsating component that depends on the mechanical angular frequency of the electric motor among the pulsating components contained in the capacitor output current. preferably.
- the control device reduces, among the pulsation components dependent on the mechanical angular frequency, particularly the first pulsation component caused by the mechanical angular frequency. This first pulsation component is dominant when the rotation speed of the motor is low, medium, or high. Therefore, if the first pulsating component can be reduced, it can greatly contribute to the reduction of harmonics of the power supply current.
- first pulsation component is the mechanical 1f component mentioned above.
- second pulsation component caused by a frequency twice the mechanical angular frequency may be added.
- mechanical 2f component is the mechanical 2f component mentioned above.
- the control device reduces at least one pulsation component dependent on both the power supply frequency and the mechanical angular frequency in addition to the first pulsation component. It is preferable to perform control to reduce the pulsation component.
- One of the pulsation components that depends on both the power supply frequency and the mechanical angular frequency is the third pulsation component resulting from the absolute value of the frequency difference between twice the power supply frequency and the mechanical angular frequency.
- Another pulsation component that depends on both the power supply frequency and the mechanical angular frequency is the absolute value of the frequency difference between twice the power supply frequency and twice the mechanical angular frequency. 4 pulsation component.
- An example of the third pulsation component is the aforementioned
- an example of the fourth pulsation component is the aforementioned
- the control device preferably changes the pulsation component to be reduced based on the mechanical angular frequency.
- the above-described second to fourth pulsation components are reversed in size according to the mechanical angular frequency. Therefore, by changing the pulsation component to be reduced based on the mechanical angular frequency, even if the scale of the control system is small, efficient control with a high reduction effect can be performed.
- control device preferably performs control to preferentially reduce the pulsation component with a lower frequency among the second, third, and fourth pulsation components.
- the component that greatly affects the harmonics of the power supply current is the pulsating component with a low frequency. Therefore, if control is performed to preferentially reduce pulsation components with lower frequencies, efficient control with a high reduction effect can be performed even if the scale of the control system is small.
- FIG. 11 is a diagram showing an example of a hardware configuration that implements the control device 100 included in the power conversion device 2 according to Embodiment 1. As shown in FIG. The control device 100 is implemented by a processor 201 and memory 202 .
- the processor 201 is a CPU (Central Processing Unit, central processing unit, processing unit, arithmetic unit, microprocessor, microcomputer, processor, DSP (Digital Signal Processor)), or a system LSI (Large Scale Integration).
- the memory 202 may be RAM (Random Access Memory), ROM (Read Only Memory), flash memory, EPROM (Erasable Programmable Read Only Memory), EEPROM (registered trademark) (Electrically Erasable Programmable Read Only Memory), non-volatile or non-volatile memory such as can be exemplified. Also, the memory 202 is not limited to these, and may be a magnetic disk, an optical disk, a compact disk, a mini disk, or a DVD (Digital Versatile Disc).
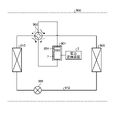
- FIG. 12 is a diagram showing a configuration example of a refrigeration cycle equipment 900 according to Embodiment 2.
- a refrigerating cycle applied equipment 900 according to the second embodiment includes the power converter 2 described in the first embodiment.
- the refrigerating cycle applied equipment 900 according to Embodiment 2 can be applied to products equipped with a refrigerating cycle, such as air conditioners, refrigerators, freezers, and heat pump water heaters.
- constituent elements having functions similar to those of the first embodiment are assigned the same reference numerals as those of the first embodiment.
- a refrigerating cycle application device 900 includes a compressor 901 incorporating the electric motor 7 according to Embodiment 1, a four-way valve 902, an indoor heat exchanger 906, an expansion valve 908, and an outdoor heat exchanger 910 with a refrigerant pipe 912. attached through
- a compression mechanism 904 for compressing refrigerant and an electric motor 7 for operating the compression mechanism 904 are provided inside the compressor 901 .
- the refrigeration cycle applied equipment 900 can perform heating operation or cooling operation by switching operation of the four-way valve 902 .
- Compression mechanism 904 is driven by electric motor 7 whose speed is controlled.
- the refrigerant is pressurized by the compression mechanism 904 and sent out through the four-way valve 902, the indoor heat exchanger 906, the expansion valve 908, the outdoor heat exchanger 910, and the four-way valve 902. Return to compression mechanism 904 .
- the refrigerant is pressurized by the compression mechanism 904 and sent through the four-way valve 902, the outdoor heat exchanger 910, the expansion valve 908, the indoor heat exchanger 906, and the four-way valve 902. Return to compression mechanism 904 .
- the indoor heat exchanger 906 acts as a condenser to release heat, and the outdoor heat exchanger 910 acts as an evaporator to absorb heat.
- the outdoor heat exchanger 910 acts as a condenser to release heat, and the indoor heat exchanger 906 acts as an evaporator to absorb heat.
- the expansion valve 908 reduces the pressure of the refrigerant to expand it.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180102308.5A CN117941243A (zh) | 2021-09-22 | 2021-09-22 | 电力转换装置、电动机驱动装置和制冷循环应用设备 |
| PCT/JP2021/034793 WO2023047486A1 (ja) | 2021-09-22 | 2021-09-22 | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 |
| JP2023549216A JP7542751B2 (ja) | 2021-09-22 | 2021-09-22 | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/034793 WO2023047486A1 (ja) | 2021-09-22 | 2021-09-22 | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023047486A1 true WO2023047486A1 (ja) | 2023-03-30 |
Family
ID=85720286
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/034793 Ceased WO2023047486A1 (ja) | 2021-09-22 | 2021-09-22 | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7542751B2 (https=) |
| CN (1) | CN117941243A (https=) |
| WO (1) | WO2023047486A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20250028651A (ko) * | 2023-08-22 | 2025-03-04 | 한국공학대학교산학협력단 | 모터 드라이브 시스템 및 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015042010A (ja) * | 2013-08-20 | 2015-03-02 | 日立アプライアンス株式会社 | モータ駆動装置、モータ駆動モジュール、圧縮機及びこれを備えた冷凍装置 |
| JP2016005368A (ja) * | 2014-06-17 | 2016-01-12 | 株式会社デンソー | 回転機の制御装置 |
| JP2019176680A (ja) * | 2018-03-29 | 2019-10-10 | ダイキン工業株式会社 | 電力変換装置 |
| WO2020184285A1 (ja) * | 2019-03-14 | 2020-09-17 | ダイキン工業株式会社 | 直接形の電力変換装置 |
-
2021
- 2021-09-22 CN CN202180102308.5A patent/CN117941243A/zh active Pending
- 2021-09-22 WO PCT/JP2021/034793 patent/WO2023047486A1/ja not_active Ceased
- 2021-09-22 JP JP2023549216A patent/JP7542751B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015042010A (ja) * | 2013-08-20 | 2015-03-02 | 日立アプライアンス株式会社 | モータ駆動装置、モータ駆動モジュール、圧縮機及びこれを備えた冷凍装置 |
| JP2016005368A (ja) * | 2014-06-17 | 2016-01-12 | 株式会社デンソー | 回転機の制御装置 |
| JP2019176680A (ja) * | 2018-03-29 | 2019-10-10 | ダイキン工業株式会社 | 電力変換装置 |
| WO2020184285A1 (ja) * | 2019-03-14 | 2020-09-17 | ダイキン工業株式会社 | 直接形の電力変換装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20250028651A (ko) * | 2023-08-22 | 2025-03-04 | 한국공학대학교산학협력단 | 모터 드라이브 시스템 및 방법 |
| KR102788503B1 (ko) | 2023-08-22 | 2025-03-28 | 한국공학대학교산학협력단 | 모터 드라이브 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7542751B2 (ja) | 2024-08-30 |
| JPWO2023047486A1 (https=) | 2023-03-30 |
| CN117941243A (zh) | 2024-04-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7566175B2 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| WO2023073880A1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| WO2023073870A1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| JP7542751B2 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| US20240405694A1 (en) | Power converting apparatus, motor drive unit, and refrigeration cycle-incorporating device | |
| JP7166468B2 (ja) | 電動機駆動装置および冷凍サイクル適用機器 | |
| JP7566174B2 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| US20240014759A1 (en) | Control device, power conversion apparatus, motor drive unit, and applied refrigeration cycle apparatus | |
| WO2023095311A1 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| WO2025069183A1 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| JP7595807B2 (ja) | モータ駆動装置及び冷凍サイクル装置 | |
| WO2020095377A1 (ja) | 負荷駆動装置、冷凍サイクル装置及び空気調和機 | |
| JP7308949B2 (ja) | 電動機駆動装置及び冷凍サイクル適用機器 | |
| JP7515740B2 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| WO2023157045A1 (ja) | 電力変換装置および空気調和機 | |
| JP7515739B2 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| WO2023073994A1 (ja) | 電動機駆動装置および冷凍サイクル適用機器 | |
| CN118104122A (zh) | 电力转换装置、马达驱动装置以及制冷循环应用设备 | |
| JP7361948B2 (ja) | 電動機駆動装置、冷凍サイクル装置、及び空気調和機 | |
| JP7592187B2 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| JP7825794B1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| JP7819347B2 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| WO2025069182A1 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| KR20090049854A (ko) | 공기조화기의 전동기 제어장치 | |
| WO2025069181A1 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21958363 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023549216 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180102308.5 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21958363 Country of ref document: EP Kind code of ref document: A1 |