WO2023026732A1 - エンコーダおよびそれを備えたモータ - Google Patents
エンコーダおよびそれを備えたモータ Download PDFInfo
- Publication number
- WO2023026732A1 WO2023026732A1 PCT/JP2022/028420 JP2022028420W WO2023026732A1 WO 2023026732 A1 WO2023026732 A1 WO 2023026732A1 JP 2022028420 W JP2022028420 W JP 2022028420W WO 2023026732 A1 WO2023026732 A1 WO 2023026732A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotating plate
- frame
- bracket
- shaft
- substrate
- Prior art date
Links
- 230000003287 optical effect Effects 0.000 claims abstract description 63
- 239000000758 substrate Substances 0.000 claims description 64
- 230000001678 irradiating effect Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 14
- 230000002093 peripheral effect Effects 0.000 description 10
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000001360 synchronised effect Effects 0.000 description 3
- 229910000576 Laminated steel Inorganic materials 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/3473—Circular or rotary encoders
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/22—Optical devices
Definitions
- the present disclosure relates to an encoder and a motor including the same.
- Patent Document 1 Encoders that detect the rotational position of the shaft of a motor have been known (for example, Patent Document 1).
- the encoder disclosed in Patent Document 1 includes a rotating plate mounted on a shaft and provided with a predetermined pattern, and a main body provided with a detector for detecting the predetermined pattern.
- the main body is fixed to a predetermined object at a fixed position that is symmetrical with respect to a virtual straight line connecting the detector and the center of the shaft when viewed from the axial direction of the shaft.
- one object of the present disclosure is to prevent damage to the rotating plate.
- a first aspect of the present disclosure relates to an encoder.
- the encoder includes a bracket, a rotating plate that rotates around a rotating shaft, a light source that faces the rotating plate and irradiates the rotating plate with light, and light emitted from the light source and reflected by the rotating plate, or
- An optical module including at least one of light-receiving elements that receive light transmitted through the rotating plate, a substrate to which the optical module is attached, and a frame that is fixed to the bracket and supports the substrate.
- the bracket has three or more recesses on the surface facing the frame, and the frame enters into the recesses of the bracket at positions corresponding to the three or more recesses through gaps.
- the difference between the inner dimension of the frame and the outer dimension of the rotating plate is greater than the difference between the inner dimension of the recess and the outer dimension of the protrusion. is also big.
- the motor includes the encoder described above, a shaft passing through the bracket, a rotor attached to the shaft, a stator facing the rotor, and a case coupled to the bracket to accommodate the rotor and the stator. , wherein the rotating plate is attached to the shaft and rotates with the front shaft.
- the encoder includes a rotating plate that rotates around a rotating shaft, a light source that faces the rotating plate and irradiates the rotating plate with light, and light emitted from the light source and reflected by the rotating plate or the rotating plate.
- an optical module including at least one of light-receiving elements that receive light transmitted through the optical module; a substrate to which the optical module is attached; and a frame that supports the substrate.
- the board has a first mounting hole, a second mounting hole, and a third mounting hole through which screws for fixing the board and the frame in a mutually positioned state are respectively inserted.
- the frame is provided at positions corresponding to the first to third mounting holes, and has three through holes through which the screws are inserted.
- the difference between the outer dimensions of the plate is the difference between the inner dimensions of the first to third mounting holes and the outer dimensions of the screw shaft, or the inner dimensions of the three through holes and the outer diameter of the screw shaft. Greater than the difference in dimensions.
- the motor comprises a bracket, a shaft passing through the bracket, and the above-described third side encoder, wherein the rotating plate is attached to and rotates with the shaft, and the substrate comprises: Together with the frame, it is fixed to the bracket with the screws.
- FIG. 1 is a cross-sectional view schematically showing a motor provided with an encoder according to Embodiment 1;
- FIG. 3 is a schematic diagram of a substrate in the motor according to Embodiment 1 when viewed from the rotating plate;
- FIG. 2 is a schematic diagram showing the frame of the motor according to Embodiment 1 as seen from the case;
- FIG. 10 is a schematic diagram of a substrate in the motor according to Embodiment 2 when viewed from the rotating plate;
- 3 is a diagram showing the upper surface of the rotating plate of the motor according to Embodiment 1, viewed from the substrate;
- FIG. 4 is a cross-sectional view schematically showing the arrangement relationship among the optical module, the substrate, and the rotating plate of the motor according to the first embodiment;
- FIG. 3 is a plan view showing the arrangement of light sources and light receiving elements of an optical module included in the motor according to Embodiment 1.
- FIG. FIG. 3 is a schematic diagram showing the bracket of the motor according to Embodiment 1 as viewed from the substrate; 5 is a diagram showing the arrangement relationship among the bracket, the inner peripheral surface of the frame, and the outer peripheral surface of the boss when the bracket is viewed from the substrate of the motor according to the first embodiment;
- FIG. FIG. 10 is a cross-sectional view schematically showing the arrangement relationship of the optical module, the substrate, and the rotating plate in Modification 2 of the motor according to Embodiment 1;
- Embodiments of the encoder and motor according to the present disclosure will be described below with examples. However, the disclosure is not limited to the examples described below. In the following description, specific numerical values and materials may be exemplified, but other numerical values and materials may be applied as long as the effects of the present disclosure can be obtained.
- An encoder includes a bracket, a rotating plate, an optical module, a substrate, and a frame.
- the bracket is a member for attaching the first encoder to the motor case.
- the rotating plate rotates around the rotation axis.
- the rotating plate may be attached to the shaft of the motor.
- the rotating plate may be attached directly or indirectly to the shaft. In the latter case, for example, the rotating plate is fixed to a boss fixed to the shaft.
- the rotating plate rotates together with the shaft with the axis of the shaft as the rotation axis.
- the rotating plate has a predetermined pattern formed along its circumferential direction.
- the predetermined pattern may be a pattern used to detect the rotational position of the shaft, or may be a pattern used to detect the rotational position and number of rotations of the shaft.
- the rotational position of the shaft means the relative angular position or absolute angular position of the shaft
- the number of revolutions of the shaft means the number of times the shaft has rotated.
- the optical module has at least one of a light source that irradiates the rotating plate with light and a light receiving element.
- the light receiving element receives light emitted from the light source and reflected by the rotating plate (reflected light) or light transmitted through the rotating plate (transmitted light).
- both the light source and the light receiving element are arranged on one side of the rotating plate.
- the light receiving element receives transmitted light
- one of the light source and the light receiving element is arranged on one side of the rotating plate and the other is arranged on the other side of the rotating plate.
- the light receiving element can convert the received light into an electrical signal. This electrical signal can be used to determine the rotational position and speed of the shaft.
- the substrate may be substantially disc-shaped.
- substantially disc-shaped means, for example, a plate-like shape in which 80% or more of the outer edge is composed of circular arcs.
- the frame accommodates the rotating plate and supports the substrate so that the optical module faces the rotating plate.
- the frame and substrate may be fixed to each other by predetermined fixing means.
- the frame may be substantially cylindrical. In other words, the frame may have a cylindrical space inside with a diameter larger than the diameter of the rotating plate.
- the rotation axis of the rotating plate is coaxial with the cylindrical space.
- the outer diameter of the frame may be the same as or different from the outer diameter of the substrate.
- the bracket has three or more recesses on the surface facing the frame.
- the three or more recesses may be recessed in the direction along the rotation axis of the rotor plate.
- the three or more recesses may be arranged concentrically.
- the three or more recesses may be arranged at equal intervals in the circumferential direction of the motor, or may be arranged at irregular intervals.
- the concave portion may be, for example, circular when viewed from the direction along the rotation axis of the rotating plate, but is not limited to this.
- the frame described above has three or more protrusions that enter the recesses of the bracket through gaps at positions corresponding to the three or more recesses.
- the number of protrusions may be the same as the number of recesses, or may be less than the number of recesses.
- the three or more protrusions may protrude in the direction along the rotation axis of the rotor plate.
- Each of the three or more projections is arranged to fit into a corresponding recess of the bracket.
- the convex portion may be, for example, circular when viewed from the direction along the rotation axis of the rotating plate, but is not limited to this.
- the difference between the inner dimension (or inner diameter) of the frame and the outer dimension (or outer diameter) of the rotating plate (hereinafter also referred to as dimensional difference A) is It is larger than the difference (hereinafter also referred to as dimensional difference B) between the dimension (inner diameter if the recess is circular) and the outer dimension (outer diameter if the projection is circular) of the frame.
- the position of the substrate or frame on which the optical module is attached is finely adjusted.
- the frame (and substrate and optical module) can be adjusted only within a range in which the outer surface of the projections do not come into contact with the inner surface of the recesses in the radial direction of the rotating plate. does not move.
- the three or more projections of the frame may be arranged at rotationally asymmetric positions around the rotation axis of the rotating plate. According to this configuration, the relative position between the frame and the bracket is specified by the protrusion of the frame and the recess of the bracket in the circumferential direction of the rotor plate. Therefore, erroneous assembly of the first encoder can be prevented.
- three or more convex portions may be arranged at rotationally symmetrical positions around the rotation axis of the rotating plate. For example, it is conceivable to dispose three convex portions at equal intervals (at intervals of 120°) in the circumferential direction of the rotating plate.
- An encoder according to another embodiment of the present disclosure (hereinafter also referred to as a second encoder) includes a rotating plate, an optical module, a substrate, and a frame.
- the rotary plate and substrate configuration of the second encoder may be the same as those of the first encoder.
- the board has a first mounting hole, a second mounting hole, and a third mounting hole through which screws for fixing the board and the frame in a mutually positioned state are inserted.
- the first to third mounting holes may be arranged at rotationally asymmetric positions around the rotation axis of the rotor plate.
- the frame has three through-holes provided at positions corresponding to the first to third mounting holes, respectively, and through which the screws are respectively inserted.
- the centers of the three through-holes may overlap the centers of the first to third mounting holes when viewed along the rotation axis of the rotary plate.
- the difference between the inner dimension of the frame and the outer dimension of the rotating plate is the difference between the inner dimension of the first to third mounting holes and the outer dimension of the shaft of the screw. (hereinafter also referred to as dimensional difference C), or the difference between the inner dimensions of the three through-holes and the outer dimension of the shaft portion of the screw (hereinafter also referred to as dimensional difference D).
- the position of the substrate or frame on which the optical module is attached is finely adjusted.
- the shafts of the screws are inserted through the corresponding mounting holes of the board and the corresponding through holes of the frame, so that the shafts of the screws are aligned with the inner edges of the mounting holes and the through holes in the radial direction of the rotating plate.
- the substrate and frame (and the optical module) can only move within a range where they do not come into contact with the inner surface of the optical module.
- the substrate can be maximized within the range.
- the inner surface of the frame does not come into contact with the outer edge of the rotating plate even if it is moved to Therefore, it is possible to prevent the rotating plate from being damaged due to contact with the frame when assembling the second encoder or the like.
- a motor according to an embodiment of the present disclosure (hereinafter also referred to as a first motor) includes the first encoder described above, a shaft, a rotor, a stator, and a case.
- the motor may be, for example, an inner rotor type three-phase synchronous motor, but is not limited to this.
- the shaft passes through the bracket of the first encoder.
- the rotating plate of the first encoder is attached to and rotates with the shaft.
- the rotor is attached to the shaft.
- the rotor may be composed of, for example, laminated steel plates, but is not limited to this.
- the rotor may have multiple permanent magnets.
- the rotor may be, for example, an embedded magnet type rotor, but is not limited to this.
- the stator faces the rotor.
- the stator may face the rotor via an air gap.
- the stator may be composed of, for example, laminated steel plates, but is not limited to this.
- the stator may have a plurality of teeth and coils wound around the teeth.
- the stator may be, for example, a concentrated winding type stator, but is not limited to this.
- the case is connected to the bracket and houses the rotor and stator.
- the case and bracket may be separate from each other, or may be integrally formed with each other.
- the case may be made of a non-magnetic material.
- the bracket may accommodate the rotor and stator together with the case.
- a motor (hereinafter also referred to as a second motor) according to another embodiment of the present disclosure includes a bracket, a shaft, and the second encoder described above.
- the motor may be, for example, an inner rotor type three-phase synchronous motor, but is not limited to this.
- the bracket is a member to which the second encoder is attached.
- the board of the second encoder is fixed to the bracket with screws together with the frame.
- the shaft passes through the bracket.
- the rotating plate of the second encoder is attached to and rotates with the shaft.
- the motor 10 of the present embodiment is an inner rotor type three-phase synchronous motor, but is not limited to this.
- FIG. 1 is a cross-sectional view schematically showing a motor 10 according to this embodiment.
- motor 10 includes shaft 12 , rotor 15 , stator 16 , case 17 , and encoder 20 having bracket 11 . 1 to 10, an xyz orthogonal coordinate system is shown in order to clearly show the arrangement of each part.
- the direction from the substrate 23 to the shaft 12 is the positive direction, and the z-axis is provided parallel to the axis of the shaft 12 .
- a plane parallel to the main surface of the substrate 23 is defined as an xy plane.
- FIG. 1 is a cross-sectional view of the motor 10 taken along a plane parallel to the xz plane passing through the axis of the shaft 12.
- the shaft 12 passes through the bracket 11 and is rotatably supported by the bracket 11 via bearings 13 .
- a rotary plate 21 (described later) of the encoder 20 is attached to the shaft 12 , and the rotary plate 21 rotates together with the shaft 12 .
- the rotor 15 is attached to the shaft 12. Rotor 15 rotates with shaft 12 .
- the rotor 15 of this embodiment is an embedded magnet type rotor, but is not limited to this.
- the stator 16 faces the rotor 15 via an air gap.
- the stator 16 is provided outside the rotor 15 in the radial direction of the motor 10 .
- the stator 16 of the present embodiment is a concentrated winding type stator, but is not limited to this.
- the case 17 is a hollow cylindrical member. Case 17 is coupled to bracket 11 and accommodates rotor 15 and stator 16 . A stator 16 is fixed to the inner surface of the case 17 . Case 17 is made of a non-magnetic material (eg, aluminum or aluminum alloy). Although the case 17 and the bracket 11 are separated from each other in this embodiment, they may be integrally formed with each other.
- a non-magnetic material eg, aluminum or aluminum alloy
- the encoder 20 of the present embodiment is a multi-rotation absolute encoder, it is not limited to this.
- the encoder 20 of the present embodiment is a battery-powered encoder, but may be a batteryless encoder provided with a permanent magnet and a power generation element.
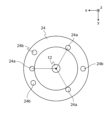
- FIG. 2 is a schematic diagram of the substrate 23 of the motor 10 according to the first embodiment, viewed from the rotating plate 21.
- FIG. FIG. 3 is a schematic diagram showing the frame 24 of the motor 10 according to Embodiment 1 as viewed from the case 17.
- the encoder 20 includes a bracket 11, a rotating plate 21, an optical module 22, a substrate 23, and a frame .
- the encoder 20 may not have the bracket 11, but the bracket 11 is a component of the motor 10 even in this case.
- the bracket 11 is a member for attaching the encoder 20 to the case 17.
- a through hole is formed in the center of the bracket 11, and the shaft 12 passes through the through hole.
- a bearing 13 that rotatably supports the shaft 12 is fixed to the inner surface of this through hole.
- Bracket 11 accommodates rotor 15 and stator 16 together with case 17 .
- the rotating plate 21 is attached to the shaft 12 of the motor 10 via bosses 25 .
- the contour shape of the rotating plate 21 is substantially circular.
- the boss 25 is fixed to the shaft 12 with a bolt 26 inserted through the bolt hole 25a.
- FIG. 5 is a diagram showing the upper surface of the rotating plate 21 of the motor 10 according to the present embodiment, viewed from the substrate 23.
- the rotating plate 21 rotates together with the shaft 12 with the axis of the shaft 12 as the rotation axis.
- Rotating plate 21 has a predetermined pattern 21p formed along its circumferential direction.
- a predetermined pattern is used to detect the rotational position and speed of shaft 12 .
- the predetermined pattern 21p has, for example, a structure in which a reflective area and a non-reflective area are arranged side by side in the circumferential direction.
- the reflective area may be formed by a pattern such as a bar code or QR code (registered trademark, hereinafter the same).
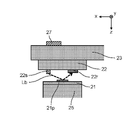
- FIG. 6 is a cross-sectional view schematically showing the arrangement relationship among the optical module 22, substrate 23, and rotating plate 21 of the motor 10 according to this embodiment.
- 7 is a plan view showing the arrangement of the light source 22s and the light receiving element 22r of the optical module 22.
- the optical module 22 has a light source 22s (for example, an LED (light emitting diode)) that irradiates the rotating plate 21 with light, and a light receiving element 22r (for example, a photodiode).
- a light receiving element 22r for example, a photodiode
- the optical module 22 has a substantially rectangular shape as shown in FIG.
- the shape is not particularly limited.
- the term “substantially rectangular shape” includes not only a rectangular shape but also a rectangular shape with rounded corners.
- the light receiving element 22r of this embodiment receives the light emitted from the light source and reflected by the rotating plate 21 .
- the light receiving element 22r may be configured to receive the light emitted from the light source 22s and transmitted through the rotating plate 21 .
- the light source can be arranged below the rotating plate 21 in FIG.
- the light receiving element converts the received light into an electrical signal. This electrical signal is used to determine the rotational position and rotational speed of shaft 12 .
- the optical module 22 has both the light source 22s and the light receiving element 22r in the example of FIG. 6, the optical module 22 may have either the light source 22s or the light receiving element 22r.
- the optical module 22 may have the light receiving element 22r and the light source 22s may be provided directly on the substrate 23.
- the optical module 22 is attached to the substrate 23 .
- Various electronic components 27 are mounted on the substrate 23 .
- FIG. 2 is a schematic diagram of the substrate 23 when viewed from the rotating plate 21 in the motor 10 according to this embodiment.
- the substrate 23 is substantially disc-shaped and has a first mounting hole 23a, a second mounting hole 23b, and a third mounting hole 23c.
- Screws 14 (or bolts) for mounting the board 23 together with the frame 24 to the bracket 11 are provided in the first mounting holes 23a to the third mounting holes 23c, respectively, as shown in the portion of the third mounting hole 23c in FIG. is inserted.
- the screws 14 fix the substrate 23 and the frame 24 in a mutually positioned state. That is, the relative positional relationship between screw 14 and bracket 11 is fixed.
- the first mounting hole 23a to the third mounting hole 23c are substantially circular and pass through the substrate 23 in its thickness direction.
- a “substantially circular shape” is, for example, a shape in which 80% or more of the outer edge is composed of circular arcs.
- the optical module 22 is arranged at a position overlapping the midpoint M of the first line segment L1 connecting the center of the first mounting hole 23a and the center of the second mounting hole 23b when viewed from the axial direction.
- the optical module 22 is divided into a first area 22a and a second area 22b by a first line segment L1.
- the ratio between the area of the first region 22a and the area of the second region 22b is 1:1.
- the center point (the intersection of two diagonal lines) of the rectangular optical module 22 and the midpoint M of the first line segment L1 coincide with each other when viewed from the axial direction.
- the optical module 22 may be arranged so that at least a part thereof overlaps the first line segment L1 when viewed in the axial direction. Such an arrangement prevents the optical module 22 from tilting and stably holds it.
- the distance between the center point of the optical module 22 and the midpoint M of the first line segment L1 may be, for example, 5 mm or less.
- the first line segment L1, the second line segment L2 connecting the center of the first mounting hole 23a and the center of the third mounting hole 23c, and the center of the second mounting hole 23b and the center of the third mounting hole 23c. forms an isosceles triangle whose base angle is larger than its apex angle and whose base is the first line segment L1.
- the first mounting hole 23a to the third mounting hole 23c are arranged at rotationally asymmetric positions around the rotation axis of the rotary plate 21. As shown in FIG.
- the frame 24 is fixed to the bracket 11.
- Frame 24 is substantially cylindrical.
- the frame 24 accommodates the rotating plate 21 and supports the substrate 23 so that the optical module 22 faces the rotating plate 21 (more specifically, the region of the rotating plate 21 where the predetermined pattern is formed).
- a substrate 23 is fixed to the frame 24 by a predetermined fixing means.
- the board 23 is fixed to the frame 24 by screws 14 .
- pins of the frame 24 may be press-fitted into pin holes formed in the substrate 23 to fix the two to each other.
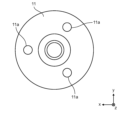
- FIG. 3 is a schematic diagram showing the frame 24 of the motor 10 according to this embodiment as viewed from the case 17.
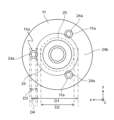
- FIG. FIG. 8 is a schematic diagram showing the bracket 11 of the motor 10 according to this embodiment as viewed from the substrate 23.
- FIG. 9 is a diagram showing the arrangement relationship among the bracket 11, the inner peripheral surface of the frame 24, and the outer peripheral surface of the boss 25 when the bracket 11 is viewed from the substrate 23 of the motor 10 according to this embodiment.
- the positions corresponding to the protrusions 24a of the frame 24 and the inner peripheral surface of the frame 24 are indicated by dashed lines
- the positions corresponding to the outer peripheral surface of the boss 25 are indicated by dashed lines.
- the frame 24 has three through holes 24b through which the screws 14 are respectively inserted.
- the three through holes 24b are provided at positions corresponding to the first mounting holes 23a to the third mounting holes 23c of the substrate 23, respectively.
- the inner dimension (inner diameter) D7 (see FIG. 1) of each through hole 24b is substantially equal to the inner dimension (inner diameter) D6 (see FIG. 1) of the first mounting hole 23a to the third mounting hole 23c of the substrate 23. , can be different.
- Each through-hole 24b penetrates the frame 24 in its thickness direction (vertical direction in FIG. 1, ie, z-axis direction). Frame 24 and substrate 23 are fixed to bracket 11 by screws 14 .
- the bracket 11 has three recesses 11a on the surface facing the frame 24 (upper surface in FIG. 1).
- the three recesses 11a are recessed in the z-axis direction.
- the three recesses 11a are arranged at equal intervals (at intervals of 120°) in the circumferential direction of the motor 10 .
- Each recess 11a is substantially circular.
- the shape of each recess 11a may be any shape such as an ellipse, a rectangle, or a polygon.
- the frame 24 enters the three recesses 11a of the bracket 11 at positions corresponding to the three recesses 11a through gaps (clearances in the radial direction of the rotating plate 21). It has three protrusions 24a.
- the three protrusions 24a protrude in the z-axis direction.
- the three protrusions 24a are arranged at regular intervals (at intervals of 120°) in the circumferential direction of the frame 24 .
- Each protrusion 24a is substantially circular.
- the shape of each convex portion 24a may be any shape such as an ellipse, a rectangle, or a polygon.
- the inner dimension (inner diameter) of the frame 24 is The difference (dimensional difference A) between D1 and the outer dimension (outer diameter) D2 of the rotary plate 21 is the inner dimension (inner diameter) D3 of the concave portion 11a of the bracket 11 and the outer dimension (outer diameter) of the convex portion 24a of the frame 24. It is larger than the difference (dimensional difference B) from D4.
- the dimensional difference B corresponds to the maximum value of the movable distance of the convex portion 24a with respect to the concave portion 11a.
- the dimensional difference A may be 2 mm or more and 3 mm or less
- the dimensional difference B may be 0.5 mm or more and 1.5 mm or less.
- the inner dimension D1 of the frame 24 is larger than the outer dimension D2 of the rotating plate 21 (D1>D2), and the inner dimension D3 of the concave portion 11a is larger than the outer dimension D4 of the convex portion 24a (D3>D4).
- the dimensional difference A in the radial direction is the difference between the inner dimension (inner diameter) D6 of the first mounting hole 23a of the substrate 23 and the outer dimension (outer diameter) D5 of the shaft portion of the screw 14. greater than the difference (dimensional difference C).
- the dimensional difference C corresponds to the maximum movable distance of the substrate 23 with respect to the screw 14 .
- the dimensional difference C may be 0.5 mm or more and 1.5 m or less.
- the inner dimension D6 of the first mounting hole 23a is larger than the outer dimension D5 of the shaft portion of the screw 14 (D6>D5).
- the dimensional difference A is larger than the difference (dimensional difference D) between the inner dimension (inner diameter) D7 of the through hole 24b of the frame 24 and the outer dimension D5 of the shaft portion of the screw 14.
- the dimensional difference D corresponds to the maximum movable distance of the frame 24 with respect to the screw 14 .
- the dimensional difference D may be 0.5 mm or more and 1.5 mm or less.
- the inner dimension D7 of the through hole 24b is larger than the outer dimension D5 of the shaft portion of the screw 14 (D7>D5).
- the following advantages can be obtained from the magnitude relationship between the above-mentioned dimensional difference A and dimensional differences B to D. That is, when finely adjusting the relative position of the optical module 22 with respect to the rotating plate 21 when assembling the encoder 20, the positions of the substrate 23 and the frame 24 to which the optical module 22 is attached are finely adjusted. During this fine adjustment, due to physical interference between members having relatively small dimensional differences B to D (for example, between the frame 24 having the convex portion 24a and the bracket 11 having the concave portion 11a), the frame 24 and the The radial movement range of the substrate 23 with respect to the rotary plate 21 is restricted. In this limited range of movement, no physical interference occurs between the frame 24 and the rotating plate 21, where a relatively large dimensional difference A exists.
- the convex portion 24 a of the frame 24 and the inner peripheral surface of the frame 24 are always positioned outside the outer peripheral surface of the boss 25 . Therefore, it is possible to prevent the rotating plate 21 from being damaged due to contact between the frame 24 and the boss 25 when assembling the encoder 20 or the like.
- FIG. 7 is a plan view of the optical module 22 viewed from the rotating plate 21 in the motor 10 according to this embodiment.
- the optical module 22 is divided into a first area 22a and a second area 22b by a first line segment L1.
- a plurality of light receiving elements 22r are arranged in the first area 22a, and a light source 22s is arranged in the second area 22b.
- Each of the plurality of light receiving elements 22r has a rectangular shape and is arranged parallel to the long sides of the rectangle.
- the plurality of light receiving elements 22r are arranged so that their long sides are perpendicular to the first line segment L1. It may be arranged so that the long side is parallel to the first line segment. Also, in the example of FIG. 7, the optical module 22 has three light receiving elements 22r, but the number is not limited to three, and it may have two or four or more light receiving elements. The reason why the optical module 22 has a plurality of light receiving elements 22r is that the light from the light source 22s irradiates across the plurality of light receiving elements 22r, so that the rotational position and number of rotations of the shaft 12 can be obtained with high accuracy.
- the plurality of light receiving elements 22r have the same shape, they may have different shapes, or two may have the same shape and the rest may have different shapes. Moreover, if only the light intensity of the light source 22s is obtained, the light receiving element 22r may be singular.
- the light source 22s may be arranged in the first region 22a, and a plurality of light receiving elements 22r may be arranged in the second region 22b.
- the light source 22s and one of the plurality of light receiving elements 22r may be arranged so as to overlap the first line segment L1.
- FIG. 10 is a cross-sectional view schematically showing the arrangement relationship of the optical module 22, the substrate 23, and the rotating plate 21 in the modified example of the motor 10 according to this embodiment.
- the light receiving element 22r is fixed to the optical module 22 and the light source 22s is fixed to the bracket 11.
- FIG. The light Lb emitted from the light source 22s passes through the pattern 21p provided on the rotating plate 21 and enters the light receiving element 22r.
- the number of rotations and the rotation angle of the rotating plate 21 can be read by the light receiving element 22r reading the pattern obtained by the light Lb passing through the pattern 21p.
- the predetermined pattern 21p has, for example, a structure in which a transmissive region and a non-transmissive region are arranged side by side in the circumferential direction.
- the transmissive region can be formed by, for example, through holes provided in the rotating plate 21 .
- the predetermined pattern 21p may have a transmissive area formed by a pattern such as a bar code or a QR code.
- the light source 22s is fixed to the optical module 22 and the light receiving element 22r is fixed to the bracket 11 instead of fixing the light receiving element 22r to the optical module 22 and the light source 22s to the bracket 11.
- FIG. 4 is a schematic diagram of the substrate 23 when viewed from the rotating plate 21 in the motor 10 according to this embodiment.
- the optical module 22 is arranged on the first line segment L1 when viewed in the axial direction, but is arranged at a position that does not overlap the midpoint M of the first line segment L1.
- the ratio of the area of the first region 22a to the area of the second region 22b is 1:2.
- the center point of the optical module 22 is located on the first line segment L1. It is possible to obtain the effect of the present disclosure even if it does not.
- first mounting hole 23a to the third mounting hole 23c are arranged at rotationally symmetrical positions around the rotation axis of the rotary plate 21. As shown in FIG. More specifically, the first mounting holes 23a to the third mounting holes 23c are arranged concentrically around the axial center of the shaft 12, and are arranged at equal intervals (at intervals of 120°) in the circumferential direction of the substrate 23. ing. Therefore, in this embodiment, an equilateral triangle is formed by the first line segment L1, the second line segment L2, and the third line segment L3.
- the present disclosure can be used for encoders and motors equipped with the same.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Optical Transform (AREA)
Abstract
Description
本開示の一実施形態に係るエンコーダ(以下、第1のエンコーダともいう。)は、ブラケットと、回転板と、光学モジュールと、基板と、フレームとを備える。
本開示の一実施形態に係るモータ(以下、第1のモータともいう。)は、上述の第1のエンコーダと、シャフトと、ロータと、ステータと、ケースとを備える。モータは、例えばインナーロータ型の三相同期電動機であってもよいが、これに限られるものではない。
本開示の実施形態1について説明する。本実施形態のモータ10は、インナーロータ型の三相同期電動機であるが、これに限られるものではない。
図10は、本実施形態に係るモータ10の、変形例における光学モジュール22、基板23および回転板21の配置の関係を模式的に示す断面図である。変形例は、受光素子22rが光学モジュール22に固定され、光源22sがブラケット11に固定される。光源22sから発した光Lbは、回転板21に設けられたパターン21pを透過し、受光素子22rに入射される。受光素子22rが、光Lbがパターン21pを透過することにより得られるパターンを読み取ることにより、回転板21の回転数および回転角度を読み取ることができる。この場合所定のパターン21pは、例えば透過領域と非透過領域とが円周方向に隣り合って並んだ構成である。なお透過領域は、例えば回転板21に設けられた貫通孔によって形成できる。所定のパターン21pは、透過領域がバーコードやQRコードといったパターンによって形成されていてもよい。
本開示の実施形態2について説明する。本実施形態は、基板23の、光学モジュール22などの配置が上記実施形態1と異なる。他の構成については、実施形態1と同様である。以下、上記実施形態1と異なる点について主に説明する。
11:ブラケット
11a:凹部
12:シャフト
13:ベアリング
14:ねじ
15:ロータ
16:ステータ
17:ケース
20:エンコーダ
21:回転板
22:光学モジュール
22a:第1領域
22b:第2領域
23:基板
23a:第1取付孔
23b:第2取付孔
23c:第3取付孔
24:フレーム
24a:凸部
24b:貫通孔
25:ボス
25a:ボルト孔
26:ボルト
D1:内寸
D2:外寸
D3:内寸
D4:外寸
D5:外寸
D6:内寸
D7:内寸
L1:第1線分
L2:第2線分
L3:第3線分
M:中点
Claims (6)
- ブラケットと、
回転軸を中心に回転する回転板と、
前記回転板に対向し、かつ前記回転板に光を照射する光源と前記回転板で反射した前記光または前記回転板を透過した前記光を受光する受光素子の少なくとも一方を含む、光学モジュールと、
前記光学モジュールが配置された基板と、
前記ブラケットに固定され、かつ前記基板を支持するフレームと、
を備え、
前記ブラケットは、前記フレームと対向する面に3つ以上の凹部を有し、
前記フレームは、3つ以上の前記凹部にそれぞれ対応する位置に、前記ブラケットの前記凹部に隙間を介してそれぞれ入り込む3つ以上の凸部を有し、
前記回転板の径方向において、前記フレームの内寸と前記回転板の外寸との差が、前記凹部の内寸と前記凸部の外寸との差よりも大きい、エンコーダ。 - 3つ以上の前記凸部は、前記回転軸の周りに回転非対称な位置に配置されている、請求項1に記載のエンコーダ。
- 請求項1または2に記載のエンコーダと、
前記ブラケットを貫通するシャフトと、
前記シャフトに取り付けられたロータと、
前記ロータと対向するステータと、
前記ブラケットに結合され、前記ロータおよび前記ステータを収容するケースと、
を備え、
前記回転板は、前記シャフトへ取り付けられ、かつ前記シャフトと共に回転する、モータ。 - 前記ブラケットは、前記ケースと共に前記ロータおよび前記ステータを収容する、請求項3に記載のモータ。
- 回転軸を中心に回転する回転板と、
前記回転板に対向し、かつ前記回転板に光を照射する光源と前記光源から照射されて前記回転板で反射した前記光または前記回転板を透過した前記光を受光する受光素子の少なくとも一方を含む、光学モジュールと、
前記光学モジュールが取り付けられた基板と、
前記基板を支持するフレームと、
を備え、
前記基板は、前記基板と前記フレームを互いに位置決めされた状態で固定するねじがそれぞれ挿通される第1取付孔、第2取付孔、および第3取付孔を有し、
前記フレームは、前記第1~第3取付孔にそれぞれ対応する位置に設けられ、前記ねじがそれぞれ挿通される3つの貫通孔を有し、
前記回転板の径方向において、前記フレームの内寸と前記回転板の外寸との差が、前記第1~第3取付孔の内寸と前記ねじの軸部の外寸との差、または3つの前記貫通孔の内寸と前記ねじの軸部の外寸との差よりも大きい、エンコーダ。 - ブラケットと、
前記ブラケットを貫通するシャフトと、
請求項5に記載のエンコーダと、
を備え、
前記回転板は、前記シャフトへ取り付けられ、かつ前記シャフトと共に回転し、
前記基板は、前記フレームと共に前記ねじで前記ブラケットへ固定される、モータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023543748A JPWO2023026732A1 (ja) | 2021-08-24 | 2022-07-22 | |
| EP22861023.4A EP4394333A1 (en) | 2021-08-24 | 2022-07-22 | Encoder, and motor provided with same |
| CN202280054881.8A CN117795294A (zh) | 2021-08-24 | 2022-07-22 | 编码器以及具备其的马达 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-136603 | 2021-08-24 | ||
| JP2021136603 | 2021-08-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023026732A1 true WO2023026732A1 (ja) | 2023-03-02 |
Family
ID=85323026
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/028420 WO2023026732A1 (ja) | 2021-08-24 | 2022-07-22 | エンコーダおよびそれを備えたモータ |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4394333A1 (ja) |
| JP (1) | JPWO2023026732A1 (ja) |
| CN (1) | CN117795294A (ja) |
| WO (1) | WO2023026732A1 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03246419A (ja) * | 1990-02-23 | 1991-11-01 | Seiko Epson Corp | エンコーダ |
| JP2000241157A (ja) * | 1999-02-20 | 2000-09-08 | Dr Johannes Heidenhain Gmbh | 測角システム |
| US20030042408A1 (en) * | 2001-08-31 | 2003-03-06 | Robert Setbacken | Attachment of an encoder hub to a motor shaft |
| JP2007322157A (ja) * | 2006-05-30 | 2007-12-13 | Sendai Nikon:Kk | ロータリエンコーダ |
| JP2013113660A (ja) * | 2011-11-28 | 2013-06-10 | Yaskawa Electric Corp | サーボモータ |
| JP2014211347A (ja) | 2013-04-18 | 2014-11-13 | 株式会社ニコン | エンコーダ、駆動装置及びロボット装置 |
| CN211877055U (zh) * | 2020-04-15 | 2020-11-06 | 山东钢铁股份有限公司 | 磁式编码器 |
-
2022
- 2022-07-22 WO PCT/JP2022/028420 patent/WO2023026732A1/ja active Application Filing
- 2022-07-22 CN CN202280054881.8A patent/CN117795294A/zh active Pending
- 2022-07-22 JP JP2023543748A patent/JPWO2023026732A1/ja active Pending
- 2022-07-22 EP EP22861023.4A patent/EP4394333A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03246419A (ja) * | 1990-02-23 | 1991-11-01 | Seiko Epson Corp | エンコーダ |
| JP2000241157A (ja) * | 1999-02-20 | 2000-09-08 | Dr Johannes Heidenhain Gmbh | 測角システム |
| US20030042408A1 (en) * | 2001-08-31 | 2003-03-06 | Robert Setbacken | Attachment of an encoder hub to a motor shaft |
| JP2007322157A (ja) * | 2006-05-30 | 2007-12-13 | Sendai Nikon:Kk | ロータリエンコーダ |
| JP2013113660A (ja) * | 2011-11-28 | 2013-06-10 | Yaskawa Electric Corp | サーボモータ |
| JP2014211347A (ja) | 2013-04-18 | 2014-11-13 | 株式会社ニコン | エンコーダ、駆動装置及びロボット装置 |
| CN211877055U (zh) * | 2020-04-15 | 2020-11-06 | 山东钢铁股份有限公司 | 磁式编码器 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN117795294A (zh) | 2024-03-29 |
| JPWO2023026732A1 (ja) | 2023-03-02 |
| EP4394333A1 (en) | 2024-07-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005241269A (ja) | 角度センサ | |
| KR20040058208A (ko) | 다회전식 인코더 | |
| JP5821109B2 (ja) | エンコーダ付きモータ | |
| JP6277406B2 (ja) | ミラー回転装置 | |
| JP6172396B1 (ja) | モータ用エンコーダ及びモータ | |
| JP2009276261A (ja) | 回転角度検出装置および回転機 | |
| JP2020115129A (ja) | 角度測定機構のための走査ユニット | |
| JP2013223382A (ja) | 回転電機 | |
| WO2023026732A1 (ja) | エンコーダおよびそれを備えたモータ | |
| JP2014236531A (ja) | モータ | |
| WO2023008081A1 (ja) | エンコーダおよびそれを備えたモータ | |
| JP7419075B2 (ja) | 角度測定機構のための走査ユニット | |
| JP2011095180A (ja) | エンコーダ及びサーボモータ | |
| JP2022079329A (ja) | エンコーダ | |
| JPWO2023026732A5 (ja) | ||
| JPWO2023008081A5 (ja) | ||
| US11460691B2 (en) | Motor, mirror rotary device, and disk drive device | |
| JP2005341648A (ja) | アライメントステージ装置 | |
| JP7192317B2 (ja) | エンコーダ | |
| JP5724982B2 (ja) | 2軸型ガルバノミラーデバイス | |
| JP2013246077A (ja) | 回転角度検出器及びモータ装置 | |
| WO2023053599A1 (ja) | 回転電機 | |
| JP2011007734A (ja) | エンコーダ及びエンコーダの取り付け方法 | |
| JPH1189204A (ja) | 直流ブラシレスモータ | |
| TWM626803U (zh) | 電機裝置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22861023 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023543748 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280054881.8 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022861023 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022861023 Country of ref document: EP Effective date: 20240325 |