WO2022137840A1 - モータユニット及び飛行体 - Google Patents
モータユニット及び飛行体 Download PDFInfo
- Publication number
- WO2022137840A1 WO2022137840A1 PCT/JP2021/040919 JP2021040919W WO2022137840A1 WO 2022137840 A1 WO2022137840 A1 WO 2022137840A1 JP 2021040919 W JP2021040919 W JP 2021040919W WO 2022137840 A1 WO2022137840 A1 WO 2022137840A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotor
- bevel gear
- shaft
- motor unit
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C11/00—Propellers, e.g. of ducted type; Features common to propellers and rotors for rotorcraft
- B64C11/02—Hub construction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C11/00—Propellers, e.g. of ducted type; Features common to propellers and rotors for rotorcraft
- B64C11/46—Arrangements of, or constructional features peculiar to, multiple propellers
- B64C11/48—Units of two or more coaxial propellers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
- B64D27/30—Aircraft characterised by electric power plants
- B64D27/34—All-electric aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D35/00—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions
- B64D35/02—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants
- B64D35/021—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants for electric power plants
- B64D35/026—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants for electric power plants the electric power plant being integral with the propeller or rotor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D35/00—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions
- B64D35/04—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions characterised by the transmission driving a plurality of propellers or rotors
- B64D35/06—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions characterised by the transmission driving a plurality of propellers or rotors the propellers or rotors being counter-rotating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/22—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating around the armatures, e.g. flywheel magnetos
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/003—Couplings; Details of shafts
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
- H02K7/1163—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/14—Structural association with mechanical loads, e.g. with hand-held machine tools or fans
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/45—UAVs specially adapted for particular uses or applications for releasing liquids or powders in-flight, e.g. crop-dusting
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/02—Toothed gearings for conveying rotary motion without gears having orbital motion
- F16H1/04—Toothed gearings for conveying rotary motion without gears having orbital motion involving only two intermeshing members
- F16H1/12—Toothed gearings for conveying rotary motion without gears having orbital motion involving only two intermeshing members with non-parallel axes
- F16H1/14—Toothed gearings for conveying rotary motion without gears having orbital motion involving only two intermeshing members with non-parallel axes comprising conical gears only
Definitions
- This disclosure relates to motor units and flying objects.
- Patent Document 1 discloses an industrial unmanned helicopter.
- This industrial unmanned helicopter is a first main rotor, a second main rotor, a drive device for rotationally driving the second main rotor, and a first main rotor in which the rotational force of the second main rotor is reversed in the rotational direction. It is equipped with a drive transmission member that transmits to.
- the driving force transmission member is located between the first main rotor and the second main rotor in the direction of the rotation axis where the rotation axis of the first main rotor extends. Therefore, there is a problem that the portion composed of the first main rotor, the second main rotor, the driving device, and the driving force transmission member tends to be large in the rotation axis direction in which the rotation axis of the first main rotor extends. be.
- This disclosure is made in view of the above reasons. It is an object of the present disclosure to provide a motor unit capable of suppressing an increase in size of the motor unit in a direction in which the axis of the rotor is extended, and an air vehicle provided with the motor unit.
- the motor unit includes a stator, a rotor, and a gear unit.
- the rotor is located around the stator and rotates by the magnetic force generated by the stator to generate a rotational force of the first rotor.
- the gear unit has a plurality of gears and converts a rotational force generated by the rotor to rotate the second rotary blade in a direction opposite to the rotation direction of the first rotary blade. At least a portion of the plurality of gears is located inside the stator.
- the motor unit has a first shaft that transmits the rotational force generated by the rotor to the first rotary blade, and a second shaft that transmits the rotational force generated by the gear unit to the second rotary blade. Further may be provided. It is preferable that the first shaft is formed in a cylindrical shape, is located around the second shaft, and is rotatably supported by the second shaft.
- the plurality of gears preferably include gears connected to the rotor.
- the gear unit includes, as the plurality of gears, a first bevel gear that rotates in the rotational direction of the rotor by the rotational force generated by the rotor, a second bevel gear that meshes with the first bevel gear, and the first bead gear. It is preferable to have a third bevel gear that meshes with the two bevel gears and rotates in a direction opposite to that of the first bevel gear to generate a rotational force of the second rotary blade.
- the motor unit has a first shaft that transmits the rotational force generated by the rotor to the first rotary blade, and a second shaft that transmits the rotational force generated by the gear unit to the second rotary blade. It is preferable to further prepare.
- the gear unit includes, as the plurality of bevel gears, a first bevel gear that rotates in the rotation direction of the rotor by the rotational force generated by the rotor, a second bevel gear that meshes with the first bevel gear, and the above-mentioned. It has a third bevel gear that meshes with the second bevel gear and rotates in the direction opposite to the first bevel gear to generate the rotational force of the second rotary blade, and the first shaft is the first umbrella. It is preferable that the second shaft rotates integrally with the gear and the second shaft rotates integrally with the third bevel gear.
- the first bevel gear is preferably a bevel gear connected to the rotor.
- the motor unit includes a lubricant that lubricates the meshing portions of the plurality of gears, a covering member that rotates with the rotor, and an opening that is located inside the stator and is covered by the covering member. It is preferable to include an accommodating portion for accommodating a plurality of gears and the lubricant, and a magnetic fluid for sealing between the accommodating portion and the covering member.
- the motor unit further includes the first rotary blade and the second rotary blade.
- the flying object according to another aspect of the present disclosure includes a main body and the motor unit attached to the main body.
- the motor unit and the flying object according to the above aspect can suppress the increase in size of the motor unit in the axial direction of the rotor.
- FIG. 1 is a perspective view of a motor unit according to an embodiment.
- FIG. 2 is a perspective sectional view of the motor unit of the same as above.
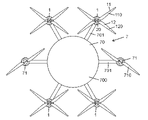
- FIG. 3 is a top view of the flying object provided with the same motor unit.
- FIG. 4 is a perspective view of another aircraft equipped with the same motor unit.
- FIG. 5 is a perspective view of yet another aircraft equipped with the same motor unit.
- FIG. 6 is an enlarged cross-sectional view of the portion shown by A1 in FIG.
- FIG. 1 is a perspective view of a motor unit 1 according to an embodiment.
- FIG. 2 is a perspective sectional view of the motor unit 1.
- the motor unit 1 is a counter-rotating rotor that rotates two rotary blades 11 and 12 coaxially arranged in opposite directions.
- the motor unit 1 is mounted on the flying objects 7, 8 and 9 as a rotor or a propeller, and is used to obtain the propulsive force of the flying objects 7, 8 and 9.
- FIG. 3 is a top view of the flying object 7 including the motor unit 1.
- FIG. 4 is a perspective view of another flying object 8 including the motor unit 1.
- FIG. 5 is a perspective view of yet another flying object 9 including the motor unit 1.
- the motor unit 1 includes a motor 2, a first rotary blade 11, a second rotary blade 12, and a gear unit 4.
- the motor 2 independently generates the driving force of the first rotary blade 11 and the driving force of the second rotary blade 12. That is, the motor 2 is shared as a drive source for the first rotor 11 and a drive source for the second rotor 12.
- Motor 2 is a brushless motor.
- the motor 2 has a stator 20 and a rotor 3 that is rotated by the magnetic force generated by the stator 20.
- the motor 2 is an outer rotor type motor in which the magnet of the rotor 3 is located around the stator 20.
- the rotor 3 generates the rotational force of the first rotary blade 11.
- the rotational force of the rotor 3 is transmitted to the first rotary blade 11 without changing the direction of the force.
- the first rotor 11 rotates in the same direction as the rotor 3 together with the rotor 3 around the axis 30 which is the center of rotation of the rotor 3, and has a propulsive force in one direction parallel to the axis 30 of the rotor 3. To generate.
- the rotational force of the rotor 3 is transmitted to the second rotary blade 12 via the gear unit 4.
- the gear unit 4 converts the rotational force of the rotor 3 to generate a rotational force that rotates the second rotary blade 12 in the direction opposite to the rotational direction of the first rotary blade 11.
- the second rotor 12 rotates about the axis 30 of the rotor 3 in the direction opposite to the rotation direction of the first rotor 11, and generates a propulsive force in one direction.
- the first rotary blade 11 and the second rotary blade 12 rotate at the same time, and the first rotary blade 11 and the second rotary blade 12 generate propulsive force in the same direction.
- the direction in which the axis 30 of the rotor 3 extends is the vertical direction, and the propulsion direction (the direction in which the first rotary blade 11 and the second rotary blade 12 generate the propulsive force) is upward.
- the motor unit 1 will be described with the direction opposite to the direction as the downward direction.
- the direction used in the present disclosure does not limit the direction when the motor unit 1 is used.
- the motor unit 1 further includes a base 5.
- the base 5 has a flat plate-shaped base plate 50 whose thickness direction is parallel to the vertical direction.
- the base plate 50 is formed in a circular shape when viewed from the vertical direction.
- the stator 20 is along the upper surface, which is one surface of the base plate 50 in the thickness direction.
- the stator 20 is fixed to the base plate 50.
- the stator 20 is fixed to the base plate 50 by, for example, a fastener such as a screw.
- the stator 20 is formed in an annular shape when viewed from the vertical direction.
- the stator 20 is formed in an annular shape concentric with the base plate 50.
- the stator 20 has, for example, a stator core and a stator coil wound around the stator core. The stator generates a magnetic force for rotating the rotor 3 by energizing the stator coil.
- the motor unit 1 further includes two shafts 61 and 62.
- One of the two shafts 61 and 62, the shaft 61 transmits the rotational force of the rotor 3 to the first rotary blade 11 to rotate the first rotary blade 11.
- the other shaft 62 transmits the rotational force output by the gear unit 4 in the direction opposite to the rotational direction of the rotor 3 to the second rotary blade 12, and makes the second rotary blade 12 in the direction opposite to the first rotary blade 11.
- the shaft 61 is referred to as a first shaft 61
- the shaft 62 is referred to as a second shaft 62.
- the second shaft 62 is formed in a columnar shape extending in the vertical direction.
- the second shaft 62 is rotatably attached to the base plate 50.
- the base 5 further has a bearing 51 attached to the center of the base plate 50.
- the lower end of the second shaft 62 is restricted from moving in the vertical direction by the bearing 51, and is rotatably supported around the central axis of the second shaft 62.
- the base plate 50 may have a portion that restricts the vertical movement of the second shaft 62 and rotatably supports the second shaft 62 about the central axis of the second shaft 62. In this case, the bearing 51 can be omitted.
- the rotor 3 is formed in a covered cylindrical shape (cup shape) that opens downward.
- the rotor 3 covers the stator 20 from above in a non-contact state.
- the rotor 3 has a lid portion 31 and a peripheral wall portion 32.
- the lid portion 31 is located above the stator 20.
- the lid portion 31 is formed in a plate shape whose thickness direction is parallel to the vertical direction.
- the lid portion 31 faces the upper surface of the stator 20 via a gap.
- the lid portion 31 has a central portion 310, a peripheral portion 311 and a plurality of connecting portions 312.
- the central portion 310 is located at the center of the lid portion 31 when viewed from the vertical direction.
- the central portion 310 is located above the space formed inside the annular stator 20.
- the peripheral edge portion 311 is formed in an annular shape when viewed from the vertical direction.
- the peripheral edge portion 311 is located around the central portion 310 at a distance from the central portion 310.
- the plurality of connecting portions 312 are arranged at intervals between the central portion 310 and the peripheral portion 311 in the circumferential direction of the rotor 3 (the circumferential direction of the peripheral portion 311).
- the plurality of connecting portions 312 connect the central portion 310 and the peripheral portion 311.
- a plurality of holes 313 arranged in the circumferential direction of the rotor 3 are formed in the lid portion 31.
- Each hole 313 is formed between adjacent connecting portions 312 in the circumferential direction of the rotor 3.
- Each hole 313 penetrates the lid portion 31 in the vertical direction.
- the plurality of holes 313 pass through the space above the lid portion 31 and the space inside the rotor 3 (the space surrounded by the peripheral wall portion 32) located below the lid portion 31. Therefore, the heat generated in the stator 20 is unlikely to be trapped inside the rotor 3.
- the peripheral wall portion 32 of the rotor 3 projects downward (toward the stator 20 side) from the peripheral edge portion 311 of the lid portion 31.
- the peripheral wall portion 32 is formed in a cylindrical shape in which the direction in which the central axis extends is parallel to the vertical direction.
- the inner peripheral surface of the peripheral wall portion 32 faces the outer peripheral surface of the stator 20 through a slight gap.
- the peripheral wall portion 32 has, for example, a plurality of magnets arranged in the circumferential direction of the rotor 3 or one magnet continuous in the circumferential direction of the rotor 3.
- the plurality of magnets are arranged so that, for example, the magnetic poles on the stator 20 side of two adjacent magnets are different.
- One magnet is magnetized so that, for example, the magnetic poles located on the stator 20 side alternate in the circumferential direction of the rotor 3.
- the rotor 3 rotates about the axis 30 of the rotor 3 by a magnetic attraction force and a repulsive force generated between the magnetic field formed by the stator 20 and a plurality or one magnet.
- a fitting hole 314 penetrating in the vertical direction is formed at the center of the lid portion 31 of the rotor 3 (center of the central portion 310).
- the first shaft 61 is formed in a cylindrical shape extending in the vertical direction.
- the first shaft 61 is located around the second shaft 62.
- the first shaft 61 is rotatably supported by the second shaft 62 about the central axis of the second shaft 62.
- the first shaft 61 passes through the fitting hole 314 of the rotor 3 and penetrates the lid portion 31 in the vertical direction.
- the first shaft 61 is fixed to the lid portion 31 of the rotor 3.
- the first shaft 61 is fixed to the lid portion 31 of the rotor 3, for example, by being press-fitted into the fitting hole 314.
- the means for fixing the first shaft 61 to the rotor 3 is not limited, and for example, the first shaft 61 may be fixed by the rotor 3 by adhesion or the like.
- the rotor 3 is rotatably supported by the second shaft 62 via the first shaft 61.
- the center of rotation of the rotor 3 is defined by the first shaft 61 and the second shaft 62.
- the rotor 3 rotates around the second shaft 62 together with the first shaft 61.
- the axis 30 which is the center of rotation of the rotor 3 overlaps with the central axis of the first shaft 61 and the central axis of the second shaft 62.
- the first shaft 61 has a protruding portion 610 protruding upward from the central portion 310 of the rotor 3.
- the first rotary blade 11 is connected to the protruding portion 610.
- the first rotary blade 11 has a rotating portion 111 and a plurality of blades 110.
- the rotating portion 111 is fixed to the protruding portion 610 of the first shaft 61.
- the rotating portion 111 rotates around the central axis of the first shaft 61 together with the first shaft 61.
- the first rotor 11 has a total of two blades 110.
- Each blade 110 is a plate-shaped blade extending in a direction intersecting the vertical direction.
- a base end portion (one end portion in the length direction) of each blade 110 is connected to the rotating portion 111.
- Each blade 110 projects from the rotating portion 111 in a direction intersecting the vertical direction.
- Each blade 110 rotates about the central axis of the second shaft 62 together with the first shaft 61 and the rotating portion 111 by rotating the rotor 3 around the axis 30 shown in FIG. As a result, the first rotary blade 11 generates an upward propulsive force.
- the number of blades 110 included in the first rotary blade 11 is not limited.
- the first rotary blade 11 may have only one blade 110, or may have three or more blades 110.
- the motor unit 1 does not have to include the first rotary blade 11. In this case, when assembling the flying objects 7, 8 and 9, the first rotary blade 11 separately prepared may be attached to the first shaft 61.
- the base 5 has an accommodating portion 52 accommodating the gear unit 4 inside the stator 20.
- a part of the accommodating portion 52 is composed of a gear case 520.
- the gear case 520 is formed in a cylindrical shape whose central axis direction is parallel to the vertical direction.
- the gear case 520 is formed in a cylindrical shape concentric with the stator 20.
- the gear case 520 is located inside the stator 20 and around the first shaft 61.
- the gear case 520 has a first opening 521 formed at the lower end of the gear case 520 and a second opening 522 formed at the upper end of the gear case 520.
- the lower end surface of the gear case 520 is along the upper surface of the base plate 50.
- the upper end surface of the gear case 520 is along the lower surface of the central portion 310 of the rotor 3. However, the gear case 520 is not in contact with the rotor 3.
- the gear case 520 is fixed to the base plate 50.
- the gear case 520 is fixed to the base plate 50 by, for example, a fastener such as a screw.
- the first opening 521 of the gear case 520 is covered by the central portion of the base plate 50.
- the central portion which is a part of the base plate 50, constitutes the bottom portion of the accommodating portion 52.
- the gear case 520 constitutes a peripheral wall portion that protrudes upward from the bottom portion of the accommodating portion 52.
- the second opening 522 of the gear case 520 is covered by a central portion 310 that is part of the rotor 3.
- the accommodating portion 52 further has a holding member 523.
- the holding member 523 holds the magnetic fluid 13 (see FIG. 6) described later.
- the holding member 523 is attached to the inner peripheral surface of the second opening 522 of the gear case 520.
- the accommodating portion 52 is composed of a gear case 520, a central portion of the base plate 50, and a holding member 523.
- the holding member 523 is formed in an annular shape when viewed from the vertical direction.
- An opening 524 penetrating in the vertical direction is formed inside the holding member 523.
- the accommodating portion 52 has an accommodating space 525 surrounded by a gear case 520, a central portion 310 of the base plate 50, and a holding member 523.
- the accommodation space 525 is opened upward through the opening 524 of the holding member 523.
- the gear unit 4 is located in the accommodation space 525.
- the gear unit 4 has a plurality of gears, bevel gears 41, 42, 43.
- the gear unit 4 has a first bevel gear 41, a plurality of second bevel gears 42, and a third bevel gear 43 as a plurality of bevel gears.
- Each of the first bevel gear 41, the plurality of second bevel gears 42, and the third bevel gear 43 is made of, for example, iron.
- Each of the first bevel gear 41, the plurality of second bevel gears 42, and the third bevel gear 43 is not limited to iron.
- Each of the first bevel gear 41, the plurality of second bevel gears 42, and the third bevel gear 43 may be formed of a metal other than iron, or may be formed of a material other than metal.
- the first bevel gear 41 is located below the central portion 310 of the rotor 3.
- the first bevel gear 41 is located at the opening 524 of the accommodating portion 52 (the upper end portion of the accommodating space 525).
- a hole 410 is formed through the first bevel gear 41 in the vertical direction.
- the first shaft 61 passes through the hole 410 of the first bevel gear 41 and penetrates the first bevel gear 41 in the vertical direction.
- the upper end of the first bevel gear 41 is located between the holding member 523 of the accommodating portion 52 and the first shaft 61.
- the upper end of the first bevel gear 41 covers the opening 524 of the accommodating portion 52. That is, the first bevel gear 41 constitutes a covering member that covers the opening 524 of the accommodating portion 52.
- the covering member is not limited to the first bevel gear 41.
- the covering member may be another member that rotates with the rotor 3. Further, the "cover member that rotates with the rotor 3" in the present disclosure includes a part of the rotor 3. Therefore, the covering member may be a member other than the first bevel gear 41, or may be a part of the rotor 3.
- the first bevel gear 41 is fixed to the central portion 310 in a state of being in contact with the lower surface of the central portion 310 of the rotor 3.
- the first bevel gear 41 is connected to the rotor 3.
- the first bevel gear 41, together with the rotor 3, rotates about the axis 30 of the rotor 3 in the same direction as the rotation direction of the rotor 3.
- On the lower surface of the first bevel gear 41 a plurality of teeth arranged in the circumferential direction of the first bevel gear 41 are formed.
- the first bevel gear 41 is a member different from the rotor 3.
- the first bevel gear 41 may be a part of the rotor 3. That is, the first bevel gear 41 may be integrally formed with the rotor 3.
- first bevel gear 41 may be fixed to the first shaft 61.
- first bevel gear 41 may be fixed to both the rotor 3 and the first shaft 61.
- the first bevel gear 41 may be fixed only to the first shaft 61.
- the first bevel gear 41 is fixed to the first shaft 61 by press-fitting the first shaft 61 into the hole 410.
- the first shaft 61 rotates integrally with the rotor 3.
- the means for fixing the first bevel gear 41 to the first shaft 61 is not limited.
- the first bevel gear 41 may be fixed to the first shaft 61 by adhesion or the like.
- the plurality of second bevel gears 42 are located below the first bevel gear 41.
- the plurality of second bevel gears 42 are arranged at intervals in the circumferential direction of the first bevel gear 41.
- the gear unit 4 has a total of three second bevel gears 42.
- the base 5 further has a plurality of support shafts 53 that each support the plurality of second bevel gears 42.
- Each support shaft 53 is attached to a gear case 520.
- Each support shaft 53 projects inward from the gear case 520.
- Each second bevel gear 42 is rotatably attached to the corresponding support shaft 53 about a rotation axis orthogonal to the axis 30 of the rotor 3.
- a plurality of teeth arranged in the circumferential direction of the second bevel gear 42 are formed on the outer peripheral surface of each second bevel gear 42.
- a portion of the plurality of teeth of each second bevel gear 42 meshes with a portion of the plurality of teeth of the first bevel gear 41.
- each second bevel gear 42 rotates about the corresponding support shaft 53.
- Each support shaft 53 may be rotatably attached to the gear case 520.
- each second bevel gear 42 may be non-rotatably fixed to the corresponding support shaft 53.
- the number of second bevel gears 42 included in the gear unit 4 is not limited.
- the gear unit 4 may have only one or only two second bevel gears 42, or may have four or more.
- the third bevel gear 43 is located below the plurality of second bevel gears 42 and the first shaft 61.
- the third bevel gear 43 is located at the lower end of the accommodation space 525 of the accommodation portion 52.
- a fitting hole 430 that penetrates the third bevel gear 43 in the vertical direction is formed.
- the second shaft 62 passes through the fitting hole 430 of the third bevel gear 43 and penetrates the third bevel gear 43 in the vertical direction.
- the third bevel gear 43 is fixed to the second shaft 62.
- the third bevel gear 43 rotates integrally with the second shaft 62 together with the second shaft 62.
- the third bevel gear 43 is fixed to the second shaft 62 by press-fitting the second shaft 62 into the fitting hole 430.
- the means for fixing the third bevel gear 43 to the second shaft 62 is not limited.
- the third bevel gear 43 may be fixed to the second shaft 62 by adhesion or the like.
- a plurality of teeth arranged in the circumferential direction of the third bevel gear 43 are formed on the upper surface of the third bevel gear 43.
- a part of the plurality of teeth of the third bevel gear 43 meshes with a part of the plurality of teeth of each second bevel gear 42.
- Each of the first bevel gear 41, the plurality of second bevel gears 42, and the third bevel gear 43 is a straight bevel gear in which the tooth muscle extends linearly.
- each of the first bevel gear 41, the plurality of second bevel gears 42, and the third bevel gear 43 may be a bevel gear if the tooth muscle is bent in a curved shape in order to suppress vibration and noise. ..
- the bevel gear included in the gear unit 4 is not limited to the bevel gear.
- the bevel gear included in the gear unit 4 may be a gear other than the bevel gear.
- the second shaft 62 has a protruding portion 620 protruding upward from the first shaft 61.
- a second rotor 12 is connected to the protruding portion 620.
- the second rotor 12 is located above the first rotor 11.
- the second rotor 12, the first rotor 11, the rotor 3, and the stator 20 are arranged in this order in the vertical direction.
- the second rotary blade 12 has a rotating portion 121 and a plurality of blades 120.
- the rotating portion 121 is fixed to the protruding portion 620 of the second shaft 62.
- the rotating portion 121 rotates around the central axis of the second shaft 62 together with the second shaft 62.
- the second rotor 12 has a total of two blades 120.
- Each blade 120 is a plate-shaped blade extending in a direction intersecting the vertical direction.
- Each blade 120 has a base end portion (one end portion in the length direction) connected to the rotating portion 121.
- Each blade 120 projects from the rotating portion 121 in a direction intersecting the vertical direction.
- Each blade 120 rotates about the central axis of the second shaft 62 together with the third bevel gear 43, the second shaft 62, and the rotating portion 121 by rotating the rotor 3 around the axis 30. As a result, the second rotor 12 generates an upward propulsive force.
- the number of blades 120 included in the second rotary blade 12 is not limited.
- the second rotary blade 12 may have only one blade 120, or may have three or more blades 120.
- the motor unit 1 does not have to include the second rotary blade 12. In this case, when assembling the flying objects 7, 8 and 9, the second rotary blade 12 prepared separately may be attached to the second shaft 62.
- the motor unit 1 further includes a lubricant for lubricating the meshing portions of the plurality of bevel gears 41, 42, 43.
- the lubricant is housed in the accommodating portion 52 together with the plurality of bevel gears 41, 42, 43.
- the lubricant is attached to the plurality of bevel gears 41, 42, 43.
- the lubricant is, for example, a lubricating oil or grease.
- FIG. 6 is an enlarged cross-sectional view of the portion shown by A1 in FIG.
- the motor unit 1 further includes a magnetic fluid (magnetic fluid seal) 13 shown in FIG.
- the magnetic fluid 13 is a liquid containing a base liquid and a large number of magnetic particles dispersed in the base liquid.
- the magnetic particles are, for example, manganese-zinc ferrite, iron oxide-based fine particles, spinel ferrite, ⁇ -hematite and the like.
- the base liquid is, for example, a hydrocarbon-based oil, a fluorine-based oil, water, or the like.
- the magnetic fluid 13 seals between the accommodating portion 52 and the first bevel gear (covering member) 41 that covers the opening 524 of the accommodating portion 52. The lubricant contained in the accommodating portion 52 is prevented from coming out from between the gear case 520 and the first bevel gear 41.
- the magnetic fluid 13 is held by the holding member 523 of the accommodating portion 52.
- the holding member 523 has a magnet 526 and a pair of magnetic pole pieces 527,528.
- the magnet 526 is a plate formed in an annular shape when viewed from the vertical direction.
- the outer peripheral end surface of the magnet 526 is along the inner peripheral surface of the second opening 522.
- Each of the pair of magnetic pole pieces 527,528 is formed of a soft magnetic material.
- Each of the magnetic pole pieces 527 and 528 is an iron plate formed in an annular shape when viewed from the vertical direction.
- the pair of magnetic pole pieces 527 and 528 are along the upper surface and the lower surface of the magnet 526, respectively.
- the outer peripheral end faces of the magnetic pole pieces 527 and 528 are along the inner peripheral surface of the second opening 522.
- the inner ends of the magnetic pole pieces 527 and 528 project inward from the inner peripheral surface of the magnet 526.
- the inner peripheral end surface of the magnet 526 and the inner peripheral end surface of each magnetic pole piece 527,528 face the outer peripheral surface of the first bevel gear 41.
- the opening 524 of the accommodating portion 52 is composed of a hole formed inside the magnet 526 and a hole formed inside each of the magnetic pole pieces 527 and 528.
- the first bevel gear 41 is located at the opening 524.
- the holding member 523 forms a magnetic circuit with a magnet 526, a pair of magnetic pole pieces 527,528, and a first bevel gear 41 made of iron.
- the magnetic circuit has a gap 14 as a magnetic gap between the inner peripheral end surface of the pair of magnetic pole pieces 527,528 and the outer peripheral surface of the first bevel gear 41.
- the magnetic circuit holds the magnetic fluid 13 in a state of being filled in the gap 14.
- the magnetic fluid 13 held in this way seals between the inner peripheral surface of the opening 524 of the accommodating portion 52 and the outer peripheral surface of the first bevel gear 41. As a result, it is possible to prevent the lubricant in the accommodating portion 52 from coming out of the accommodating portion 52.
- the first bevel gear 41 may be formed of a soft magnetic material other than iron.
- the bevel gear other than the first bevel gear 41 included in the gear unit 4 may be formed of a material other than the soft magnetic material.
- the magnetic fluid 13 may be held by means other than the holding member 523.
- the motor unit 1 does not have to include the magnetic fluid 13 and the holding member 523.
- the increase in size of the motor unit 1 in the vertical direction is suppressed.
- the first rotary blade 11 and the second rotary blade 12 can be arranged near the stator 20 and the rotor 3 in the vertical direction. Therefore, the length of each of the shafts 61 and 62 in the vertical direction can be shortened. Moreover, it is possible to suppress the vibration of the upper end portions of the shafts 61 and 62 when the rotor 3 is rotated. Therefore, it is possible to prevent the shafts 61 and 62 from being deformed by wind or the like.
- the shafts 61 and 62 it is not necessary to increase the strength of the shafts 61 and 62 by thickening the shafts 61 and 62. Further, it is not necessary to increase the strength of the portion supporting each of the shafts 61 and 62 such as the bearing 51. In addition, the vibration of the blades 110 and 120 during flight of the flying objects 7, 8 and 9 is also suppressed. Therefore, when the flight bodies 7, 8 and 9 are in flight, data can be accurately acquired by the sensor provided in the flight controller of the flight bodies 7, 8 and 9. It is also possible to reduce the size of the cushion for protecting the control devices of the flying objects 7, 8 and 9, such as sponge and rubber, or omit the cushion.
- the gear unit 4 is arranged in the space formed inside the annular stator 20, it is possible to prevent the motor unit 1 from becoming larger in the direction orthogonal to the vertical direction. Further, since the stator 20 is present around the gear unit 4, dust, dust, insects, and the like are suppressed from entering the inside of the stator 20 in which the gear unit 4 is present.
- the plurality of bevel gears 41, 42, 43 included in the gear unit 4 may be entirely arranged inside the stator 20. A part of the plurality of bevel gears 41, 42, 43 included in the gear unit 4 may be arranged below the stator 20. That is, at least a part of the plurality of bevel gears 41, 42, 43 may be arranged inside the stator 20.
- FIG. 3 shows an air vehicle 7 equipped with a motor unit 1.
- Aircraft 7 is an unmanned aerial vehicle capable of autonomous flight or remote-controlled flight.
- the flying object 7 is large and can be used for pesticide spraying, transportation, and the like.
- the size of the flying object 7 is not limited. Further, the flying object may be a manned aircraft.
- the flying object 7 is a multicopter.
- the flying object 7 includes a main body 70 and a plurality of rotors.
- the flying object 7 includes a plurality of motor units 1 and a plurality of single rotors 71 as a plurality of rotors. That is, the flying object 7 includes a motor unit 1 used as a conrotor rotor and a single rotor 71 that rotates only one rotor 710.
- the flying object 7 includes four motor units 1 and two single rotors 71.
- the number of motor units 1 and the number of single rotors 71 included in the flying object 7 are not limited.
- the main body 70 has a housing 700, a flight controller, a power supply, a plurality of arms 701, and the like.
- the flight controller and power supply are built in, for example, the housing 700.
- the flight controller and the power supply may be attached to the outer surface of the housing 700.
- the main body 70 has the same number of arms 701 as the number of rotors (the number of the number of motor units 1 and the number of single rotors 71) included in the flying object 7 as the plurality of arms 701.
- Each arm 701 projects from the housing 700 in a direction intersecting the vertical direction.
- a motor unit 1 or a single rotor 71 is attached to each arm 701.
- each motor unit 1 the first rotary blade 11 and the second rotary blade 12 are located above the stator 20, and the propulsive force generated by each of the first rotary blade 11 and the second rotary blade 12 acts upward. It is attached to the arm 701. Each single rotor 71 is also attached to the arm 701 so that the propulsive force generated by the rotary blade 710 works upward.
- the flight controller has, for example, a control device and a plurality of sensors.
- the control device is, for example, a microcontroller and has a processor and memory as hardware.
- the control device controls the flight of the flying object 7 by the processor executing the program recorded in the memory.
- the plurality of sensors may include an acceleration sensor, a gyro sensor, a geomagnetic sensor, a pressure sensor (altitude meter), a GPS (Global Positioning system) sensor, and an image sensor.
- the control device controls a plurality of motor units 1 and a plurality of single rotors 71 based on data acquired by a plurality of sensors, and controls a flight direction, a flight speed, a flight attitude, and the like of the flight body 7.
- the control of each motor unit 1 by the flight controller is performed, for example, via ESC (Electric Speed Controller).
- the ESC may be possessed by the main body 70, or may be possessed by the motor unit 1 or the single rotor 71.
- the power supply supplies electric power to the flight controller, the plurality of motor units 1, the plurality of single rotors 71, and the like.
- the power source is, for example, a battery such as a lithium polymer battery, a lithium ion battery, or a nickel hydrogen battery.
- the main body 70 may further include a remote controller, a camera device, or the like.
- the main body 70 may further have a communication device that communicates with an external device such as a personal computer.
- FIG. 4 shows another flying object 8 provided with the motor unit 1 of the present embodiment.
- the flying object 8 has elements in common with the flying object 7 shown in FIG. Therefore, in the following, the description of the matters overlapping with the flying object 7 in the flying object 8 will be omitted.
- the flying object 8 includes a main body 80 and a plurality of motor units 1.
- the main body 80 has a plurality of main wings 81 and a plurality of tail wings 82.
- the main body 80 also has a flight controller and a power supply like the main body 70 of the flying object 7.
- a motor unit 1 is attached to each main wing 81.
- the first rotary wing 11 and the second rotary wing 12 are located in front of the stator 20, and the first rotary wing 11 and the second rotary wing 11 and the second rotary wing 12 are located in front of the stator 20. It is attached to the main wing 81 so that the propulsive force generated by each of the wings 12 acts forward.
- FIG. 5 shows yet another flying object 9 provided with the motor unit 1 of the present embodiment.
- the flying object 9 has elements in common with the flying object 8 shown in FIG. Therefore, in the following, the description of the matters overlapping with the flying object 8 in the flying object 9 will be omitted.
- the flying object 9 includes a main body 90 and one motor unit 1.
- the main body 90 has the same configuration as the main body 80 of the flying object 8 shown in FIG.
- the motor unit 1 is attached to the nose, which is the front end of the main body 90.
- the main body of the motor unit 1 is such that the first rotary blade 11 and the second rotary blade 12 are located in front of the stator 20, and the propulsive force generated by the first rotary blade 11 and the second rotary blade 12 acts forward. It is attached to 90.
- the gear is shown as an example of a configuration using bevel gears 41, 42, 43.
- the gear is not limited to the bevel gear as long as the same action and effect as described above can be obtained.
- the gear can obtain the same configuration by using a spur gear.
- the motor unit (1) of the first aspect has the configuration shown below.
- the motor unit (1) includes a stator (20), a rotor (3), and a gear unit (4).
- the rotor (3) is located around the stator (20) and rotates by the magnetic force generated by the stator (20) to generate the rotational force of the first rotary blade (11).
- the gear unit (4) has a bevel gear (41, 42, 43) which is a plurality of gears.
- the gear unit (4) converts the rotational force generated by the rotor (3) to rotate the second rotary blade (12) in the direction opposite to the rotation direction of the first rotary blade (11). At least a portion of the plurality of bevel gears (41, 42, 43) is located inside the stator (20).
- the first rotary blade (11) and the second rotary blade (12) can be arranged close to the stator (20) and the rotor (3) in the direction in which the axial center (30) of the rotor (3) extends. Therefore, the members such as the shaft (61, 62) that transmit the rotational force of the rotor (3) to the first rotary blade (11) and the second rotary blade (12) are shortened, and the shaft (61, 62) or the like is shortened. The vibration of the member can be suppressed.
- the motor unit (1) of the second aspect can be realized by the combination with the first aspect.
- most of the plurality of bevel gears (41, 42, 43) are located inside the stator (20).
- more than half of the plurality of bevel gears (41, 42, 43) are located inside the stator (20).
- the motor unit (1) of the third aspect can be realized by the combination with the first or the second aspect.
- the motor unit (1) of the third aspect further includes a first shaft (61) and a second shaft (62).
- the first shaft (61) transmits the rotational force generated by the rotor (3) to the first rotary blade (11).
- the second shaft (62) transmits the rotational force generated by the gear unit (4) to the second rotary blade (12).
- the first shaft (61) is formed in a cylindrical shape, is located around the second shaft (62), and is rotatably supported by the second shaft (62).
- the first shaft (61) can be supported by using the second shaft (62) that transmits the rotational force output by the gear unit (4) to the second rotary blade (12). Therefore, it is possible to suppress the increase in size in the direction orthogonal to the axis (30) of the motor unit (1).
- the motor unit (1) of the fourth aspect can be realized by combining with any one of the first to third aspects.
- the plurality of bevel gears (41, 42, 43) of the fourth aspect include the first bevel gear (41) connected to the rotor (3).
- the motor unit (1) of the fifth aspect can be realized by combining with any one of the first to third aspects.
- the gear unit (4) of the fifth aspect has a first bevel gear (41), a second bevel gear (42), and a third bevel gear (43) as a plurality of bevel gears.
- the first bevel gear (41) rotates in the rotation direction of the rotor (3) by the rotational force generated by the rotor (3).
- the second bevel gear (42) meshes with the first bevel gear (41).
- the third bevel gear (43) meshes with the second bevel gear (42) and rotates in the direction opposite to that of the first bevel gear (41) to generate a rotational force of the second rotary blade (12).
- the rotational force generated by the rotor (3) is applied to the second rotary blade (3) by using the first bevel gear (41), the second bevel gear (42) and the third bevel gear (43). 12) can be converted into a rotational force in the opposite direction to rotate.
- the motor unit (1) of the sixth aspect can be realized by the combination with the first or the second aspect.
- the sixth aspect has the configuration shown below.
- the motor unit (1) further includes a first shaft (61) and a second shaft (62).
- the first shaft (61) transmits the rotational force generated by the rotor (3) to the first rotary blade (11).
- the second shaft (62) transmits the rotational force generated by the gear unit (4) to the second rotary blade (12).
- the gear unit (4) has a first bevel gear (41), a second bevel gear (42), and a third bevel gear (43) as the plurality of bevel gears.
- the first bevel gear (41) rotates in the rotation direction of the rotor (3) by the rotational force generated by the rotor (3).
- the second bevel gear (42) meshes with the first bevel gear (41).
- the third bevel gear (43) meshes with the second bevel gear (42) and rotates in the direction opposite to that of the first bevel gear (41) to generate a rotational force of the second rotary blade (12).
- the first shaft (61) rotates integrally with the first bevel gear (41).
- the second shaft (62) rotates integrally with the third bevel gear (43).
- the rotational force generated by the rotor (3) is applied to the second rotary blade (3) by using the first bevel gear (41), the second bevel gear (42) and the third bevel gear (43). 12) can be converted into a rotational force in the opposite direction to rotate. Further, the first rotary blade (11) can be rotated by the first shaft (61) that rotates integrally with the first bevel gear (41). Further, the second rotary blade (12) can be rotated by the second shaft (62) that rotates integrally with the third bevel gear (43).
- the motor unit (1) of the seventh aspect can be realized by the combination with the fifth or sixth aspect.
- the first bevel gear (41) of the seventh aspect is a bevel gear connected to the rotor (3).
- the motor unit (1) of the eighth aspect can be realized by combining with any one of the first to seventh aspects.
- the motor unit (1) of the eighth aspect further includes a lubricant, a covering member (first bevel gear 41), an accommodating portion (52), and a magnetic fluid (13).
- the lubricant lubricates the meshing portions of the plurality of bevel gears (41, 42, 43).
- the covering member (41) rotates together with the rotor (3).
- the accommodating portion (52) is located inside the stator (20) and includes an opening (524) covered by a covering member (41) to contain a plurality of bevel gears (41, 42, 43) and a lubricant. Contain.
- the magnetic fluid (13) seals between the accommodating portion (52) and the covering member (41).
- the opening (524) of the accommodating portion (52) can be covered by using the covering member (41) that rotates together with the rotor (3), further suppressing the increase in size of the motor unit (1). can do.
- the covering member (41) that rotates together with the rotor (3), further suppressing the increase in size of the motor unit (1). can do.
- the motor unit (1) of the ninth aspect can be realized by combining with any one of the first to eighth aspects.
- the motor unit (1) of the ninth aspect further includes a first rotary blade (11) and a second rotary blade (12).
- the flying object (7, 8, 9) of the tenth aspect has the following configuration.
- the flying object (7,8,9) includes a motor unit (1) and a main body (70,80,90).
- the motor unit (1) is the motor unit (1) of the ninth aspect.
- a motor unit (1) is attached to the main body (70, 80, 90).
- the members such as the shaft (61, 62) of the motor unit (1) can be made lighter. Therefore, the weight of the entire flying object (7,8,9) can be reduced, and the time or distance that the flying object (7,8,9) flies per unit can be extended.
- the motor unit (1) and the flying object (7, 8, 9) of the present disclosure can be used in various fields such as household toys as well as industries such as agriculture, transportation, and service.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022571940A JPWO2022137840A1 (https=) | 2020-12-22 | 2021-11-08 | |
| EP21909994.2A EP4269240B1 (en) | 2020-12-22 | 2021-11-08 | Motor unit and flying object |
| US18/257,117 US20240030780A1 (en) | 2020-12-22 | 2021-11-08 | Motor unit and flying object |
| CN202180084160.7A CN116601079A (zh) | 2020-12-22 | 2021-11-08 | 马达单元和飞行体 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020212813 | 2020-12-22 | ||
| JP2020-212813 | 2020-12-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022137840A1 true WO2022137840A1 (ja) | 2022-06-30 |
Family
ID=82157554
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/040919 Ceased WO2022137840A1 (ja) | 2020-12-22 | 2021-11-08 | モータユニット及び飛行体 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240030780A1 (https=) |
| EP (1) | EP4269240B1 (https=) |
| JP (1) | JPWO2022137840A1 (https=) |
| CN (1) | CN116601079A (https=) |
| WO (1) | WO2022137840A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12122503B1 (en) * | 2021-09-20 | 2024-10-22 | Wisk Aero Llc | Aerodynamic rotor blade configurations |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015108147A1 (ja) * | 2014-01-16 | 2015-07-23 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置 |
| WO2018056230A1 (ja) * | 2016-09-21 | 2018-03-29 | 日本精工株式会社 | 電動車両駆動装置 |
| WO2019123772A1 (ja) * | 2017-12-18 | 2019-06-27 | ソニー株式会社 | アクチュエータ |
| JP2019151168A (ja) | 2018-03-01 | 2019-09-12 | 株式会社Tkkワークス | 産業用無人ヘリコプタ |
| US20200216183A1 (en) * | 2019-01-08 | 2020-07-09 | Hamilton Sundstrand Corporation | Rotary propulsion systems and methods of propelling vehicles using rotary propulsion systems |
| US20200227988A1 (en) * | 2019-01-14 | 2020-07-16 | Rolls-Royce Plc | Dual-rotor electric machine |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9434471B2 (en) * | 2005-04-14 | 2016-09-06 | Paul E Arlton | Rotary wing vehicle |
| US8253294B1 (en) * | 2008-05-02 | 2012-08-28 | E-Wish Technology, Llc | Increased efficiency dual rotational electric motor/generator |
| KR20090089822A (ko) * | 2009-07-21 | 2009-08-24 | 곽상호 | 중심부에 회전날개와 자극을 결합한 회전체를 이용한 모터의 구조 |
| US20130181562A1 (en) * | 2012-01-17 | 2013-07-18 | Hamilton Sundstrand Corporation | Dual-rotor machine |
| US9906106B1 (en) * | 2014-01-31 | 2018-02-27 | Maestra Energy, Llc | Electrical generator or motor with variable coil winding patterns exhibiting multiple wires incorporated into a plurality coil configurations defined around a rotor and incorporating a gearbox arrangement exhibiting oppositely driven rotor and stator gears configured with multi-tiered reversing gears exhibiting both straight and helical patterns and for varying turning ratios for establishing either of acceleration or deceleration aspects for increased power output |
| KR101601418B1 (ko) * | 2014-05-20 | 2016-03-09 | 현대중공업 주식회사 | 선박용 추진장치 |
| WO2016180750A1 (en) * | 2015-05-08 | 2016-11-17 | Rolls-Royce Ab | A marine vessel propulsion device, a pod unit and a marine vessel. |
| US10407169B2 (en) * | 2016-08-30 | 2019-09-10 | Bell Textron Inc. | Aircraft having dual rotor-to-wing conversion capabilities |
| CN107352024A (zh) * | 2017-07-12 | 2017-11-17 | 重庆国飞通用航空设备制造有限公司 | 共轴双桨反向旋翼机构及其飞行器 |
| US10988247B2 (en) * | 2017-10-19 | 2021-04-27 | Uvionix Aerospace Corporation | Unmanned aerial vehicle and propulsion system for an unmanned aerial vehicle |
| US20190283864A1 (en) * | 2018-03-16 | 2019-09-19 | Hamilton Sundstrand Corporation | Counter-rotating propeller system with capability to stop rotation of one row |
| EP4434894A3 (en) * | 2018-04-17 | 2025-01-15 | The Maglev Aero Co. | Systems and methods for vertical takeoff and landing using magnetic levitation |
| US10663041B2 (en) * | 2018-08-14 | 2020-05-26 | Hamilton Sunstrand Corporation | Jam-tolerant electric linear actuator |
| CN111332462B (zh) * | 2020-02-24 | 2021-08-03 | 北京理工大学 | 一种便携式小型筒式共轴反桨三叶片旋翼式无人机 |
| US11702197B2 (en) * | 2020-03-19 | 2023-07-18 | Lockheed Martin Corporation | Coaxial split torque gearbox with sequential load distribution |
-
2021
- 2021-11-08 US US18/257,117 patent/US20240030780A1/en not_active Abandoned
- 2021-11-08 WO PCT/JP2021/040919 patent/WO2022137840A1/ja not_active Ceased
- 2021-11-08 JP JP2022571940A patent/JPWO2022137840A1/ja not_active Ceased
- 2021-11-08 CN CN202180084160.7A patent/CN116601079A/zh active Pending
- 2021-11-08 EP EP21909994.2A patent/EP4269240B1/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015108147A1 (ja) * | 2014-01-16 | 2015-07-23 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置 |
| WO2018056230A1 (ja) * | 2016-09-21 | 2018-03-29 | 日本精工株式会社 | 電動車両駆動装置 |
| WO2019123772A1 (ja) * | 2017-12-18 | 2019-06-27 | ソニー株式会社 | アクチュエータ |
| JP2019151168A (ja) | 2018-03-01 | 2019-09-12 | 株式会社Tkkワークス | 産業用無人ヘリコプタ |
| US20200216183A1 (en) * | 2019-01-08 | 2020-07-09 | Hamilton Sundstrand Corporation | Rotary propulsion systems and methods of propelling vehicles using rotary propulsion systems |
| US20200227988A1 (en) * | 2019-01-14 | 2020-07-16 | Rolls-Royce Plc | Dual-rotor electric machine |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4269240A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4269240A1 (en) | 2023-11-01 |
| EP4269240A4 (en) | 2024-05-01 |
| US20240030780A1 (en) | 2024-01-25 |
| CN116601079A (zh) | 2023-08-15 |
| JPWO2022137840A1 (https=) | 2022-06-30 |
| EP4269240B1 (en) | 2025-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102771201B (zh) | 用于旋翼无人飞机的导航电子卡支承件 | |
| CN110861454B (zh) | 一种可重构空潜两栖机器人 | |
| JP4688928B2 (ja) | 反転同軸ロータのハブシャフトフェアリングの回転抑止システム | |
| US11975829B2 (en) | Motor unit and aircraft | |
| US20210129984A1 (en) | Unmanned aerial vehicle | |
| JP2009186477A (ja) | コントロールモーメントジャイロ | |
| US20150123451A1 (en) | Drive System | |
| WO2022137840A1 (ja) | モータユニット及び飛行体 | |
| JPWO2022137840A5 (https=) | ||
| US10633083B2 (en) | Unmanned aerial vehicle and method for driving an unmanned aerial vehicle | |
| US20230382542A1 (en) | Motor unit and aircraft | |
| JPWO2022130726A5 (https=) | ||
| CN106976560A (zh) | 一种无人机电机座、无人机驱动装置和无人机 | |
| CN107438563B (zh) | 机架组件及使用该机架组件的无人机 | |
| US11263926B2 (en) | Suspended galaxy device | |
| JP2018062275A (ja) | 水中推進装置および水中探査装置 | |
| JP2018129894A (ja) | アウターロータ型モータおよび飛行装置 | |
| CN110461707A (zh) | 用于能够悬停的飞行器的旋翼 | |
| KR101703822B1 (ko) | 회전소나시스템을 구비한 초소형 수상 로봇 | |
| JP6398145B2 (ja) | 無人航空機およびその保管方法 | |
| JP2018002095A (ja) | 飛行体 | |
| CN212784927U (zh) | 电机及手持云台 | |
| JP7384337B2 (ja) | 静謐性を向上した無人飛行体 | |
| CN108458892A (zh) | 一种具有岩石样本采集和搬运功能的旋翼式火星无人机 | |
| KR20110104835A (ko) | 추진력 발생 유닛 및 이를 포함하는 추진력 발생 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21909994 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022571940 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18257117 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180084160.7 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021909994 Country of ref document: EP Effective date: 20230724 |