WO2021210200A1 - Dispositif d'assemblage, procédé d'assemblage et procédé de fabrication de dispositif électronique - Google Patents
Dispositif d'assemblage, procédé d'assemblage et procédé de fabrication de dispositif électronique Download PDFInfo
- Publication number
- WO2021210200A1 WO2021210200A1 PCT/JP2020/039316 JP2020039316W WO2021210200A1 WO 2021210200 A1 WO2021210200 A1 WO 2021210200A1 JP 2020039316 W JP2020039316 W JP 2020039316W WO 2021210200 A1 WO2021210200 A1 WO 2021210200A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- side wall
- component
- pair
- wall portions
- robot hand
- Prior art date
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
- B23P19/02—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes for connecting objects by press fit or for detaching same
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R12/00—Structural associations of a plurality of mutually-insulated electrical connecting elements, specially adapted for printed circuits, e.g. printed circuit boards [PCB], flat or ribbon cables, or like generally planar structures, e.g. terminal strips, terminal blocks; Coupling devices specially adapted for printed circuits, flat or ribbon cables, or like generally planar structures; Terminals specially adapted for contact with, or insertion into, printed circuits, flat or ribbon cables, or like generally planar structures
- H01R12/70—Coupling devices
- H01R12/71—Coupling devices for rigid printing circuits or like structures
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R12/00—Structural associations of a plurality of mutually-insulated electrical connecting elements, specially adapted for printed circuits, e.g. printed circuit boards [PCB], flat or ribbon cables, or like generally planar structures, e.g. terminal strips, terminal blocks; Coupling devices specially adapted for printed circuits, flat or ribbon cables, or like generally planar structures; Terminals specially adapted for contact with, or insertion into, printed circuits, flat or ribbon cables, or like generally planar structures
- H01R12/70—Coupling devices
- H01R12/91—Coupling devices allowing relative movement between coupling parts, e.g. floating or self aligning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R43/00—Apparatus or processes specially adapted for manufacturing, assembling, maintaining, or repairing of line connectors or current collectors or for joining electric conductors
- H01R43/26—Apparatus or processes specially adapted for manufacturing, assembling, maintaining, or repairing of line connectors or current collectors or for joining electric conductors for engaging or disengaging the two parts of a coupling device
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manufacturing & Machinery (AREA)
- Automatic Assembly (AREA)
Abstract
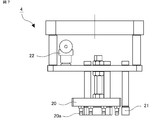
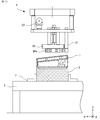
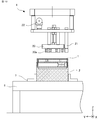
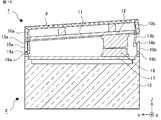
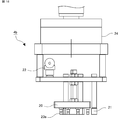
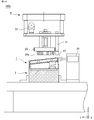
La présente invention concerne un premier composant (1) prise par une main de robot (4), et la main de robot (4) est inclinée de telle sorte que l'une d'une paire de premières parois latérales (10) est positionnée plus bas que l'autre. La main de robot inclinée (4) est abaissée à partir du dessus d'un second composant (2) et, après qu'une surface inférieure de l'une de la paire de premières parois latérales (10) entre en contact avec une surface supérieure de l'une d'une paire de secondes parois latérales (16), la prise est relâchée. Une saillie (14a), qui fait saillie à partir d'une patte (13) s'étendant vers le bas à partir de la paroi latérale de la paire de parois latérales (10), est insérée dans un évidement (19b) formé dans l'une de la paire de secondes parois latérales (16). Le premier composant (1) est pressé par la main de robot (4). Une saillie (14b), qui fait saillie à partir d'une patte (13) s'étendant vers le bas à partir de l'autre de la paire de parois latérales (10), est insérée dans un évidement (19b) formé dans l'autre de la paire de secondes parois latérales (16).
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022515194A JP7224537B2 (ja) | 2020-04-14 | 2020-10-20 | 組付装置、組付方法および電子機器の製造方法 |
| CN202080099550.7A CN115443587A (zh) | 2020-04-14 | 2020-10-20 | 组装装置、组装方法及电子设备的制造方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-072102 | 2020-04-14 | ||
| JP2020072102 | 2020-04-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021210200A1 true WO2021210200A1 (fr) | 2021-10-21 |
Family
ID=78084097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/039316 WO2021210200A1 (fr) | 2020-04-14 | 2020-10-20 | Dispositif d'assemblage, procédé d'assemblage et procédé de fabrication de dispositif électronique |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7224537B2 (fr) |
| CN (1) | CN115443587A (fr) |
| WO (1) | WO2021210200A1 (fr) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0488688U (fr) * | 1990-12-11 | 1992-07-31 | ||
| JPH0946059A (ja) * | 1995-07-28 | 1997-02-14 | Yazaki Corp | カバー付電気接続箱 |
| JP2014037030A (ja) * | 2012-08-17 | 2014-02-27 | Fujitsu Ltd | パーツの組付装置及びパーツの組付方法 |
| JP2015104207A (ja) * | 2013-11-25 | 2015-06-04 | 矢崎総業株式会社 | 電気接続箱 |
| JP2017030090A (ja) * | 2015-07-31 | 2017-02-09 | 富士通株式会社 | ロボットハンド、情報処理装置製造装置、情報処理装置製造方法 |
| JP2018114585A (ja) * | 2017-01-18 | 2018-07-26 | 富士通株式会社 | 組立装置及び組立方法 |
| JP2018143013A (ja) * | 2017-02-27 | 2018-09-13 | 日立オートモティブシステムズ株式会社 | 電子制御装置 |
-
2020
- 2020-10-20 CN CN202080099550.7A patent/CN115443587A/zh active Pending
- 2020-10-20 WO PCT/JP2020/039316 patent/WO2021210200A1/fr active Application Filing
- 2020-10-20 JP JP2022515194A patent/JP7224537B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0488688U (fr) * | 1990-12-11 | 1992-07-31 | ||
| JPH0946059A (ja) * | 1995-07-28 | 1997-02-14 | Yazaki Corp | カバー付電気接続箱 |
| JP2014037030A (ja) * | 2012-08-17 | 2014-02-27 | Fujitsu Ltd | パーツの組付装置及びパーツの組付方法 |
| JP2015104207A (ja) * | 2013-11-25 | 2015-06-04 | 矢崎総業株式会社 | 電気接続箱 |
| JP2017030090A (ja) * | 2015-07-31 | 2017-02-09 | 富士通株式会社 | ロボットハンド、情報処理装置製造装置、情報処理装置製造方法 |
| JP2018114585A (ja) * | 2017-01-18 | 2018-07-26 | 富士通株式会社 | 組立装置及び組立方法 |
| JP2018143013A (ja) * | 2017-02-27 | 2018-09-13 | 日立オートモティブシステムズ株式会社 | 電子制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115443587A (zh) | 2022-12-06 |
| JP7224537B2 (ja) | 2023-02-17 |
| JPWO2021210200A1 (fr) | 2021-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108453701B (zh) | 控制机器人的方法、示教机器人的方法和机器人系统 | |
| CN107336229B (zh) | 机器人以及机器人系统 | |
| US11338442B2 (en) | Robot apparatus, control method for robot apparatus, article manufacturing method using robot apparatus, and storage medium | |
| US10363661B2 (en) | Control device, robot, and robot system | |
| US10399221B2 (en) | Robot and robot system | |
| WO2017046975A1 (fr) | Dispositif de fixation, procédé et fixation et mécanisme à main | |
| WO2012101955A1 (fr) | Dispositif de commande et procédé de commande de bras robotisé, robot, programme de commande de bras robotisé et circuit électronique intégré | |
| CN109278063B (zh) | 机器人装置、控制方法、组装方法和记录介质 | |
| US10836003B2 (en) | Insertion guide and insertion guide device | |
| Takahashi et al. | Passive alignment principle for robotic assembly between a ring and a shaft with extremely narrow clearance | |
| CN108858182B (zh) | 机器人的控制装置及控制方法以及机器人系统 | |
| WO2021210200A1 (fr) | Dispositif d'assemblage, procédé d'assemblage et procédé de fabrication de dispositif électronique | |
| WO2018043212A1 (fr) | Dispositif d'assemblage, et procédé de fabrication de dispositif électronique | |
| JP7147419B2 (ja) | エンドエフェクタ装置 | |
| Hartisch et al. | Compliant finray-effect gripper for high-speed robotic assembly of electrical components | |
| CN110024509B (zh) | 部件安装装置及其控制方法 | |
| JP6988757B2 (ja) | エンドエフェクタおよびエンドエフェクタ装置 | |
| CN112975947A (zh) | 元器件引脚的矫正方法、装置、设备及存储介质 | |
| JP7186900B2 (ja) | コネクタ嵌合装置およびコネクタ嵌合方法 | |
| JPH0796427A (ja) | ロボットの制御装置 | |
| Oh et al. | A modified perturbation/correlation method for force-guided assembly | |
| WO2022244437A1 (fr) | Dispositif de commande de robot, procédé de commande et programme de commande | |
| JP2021037594A (ja) | ロボットシミュレーション装置 | |
| JP7361626B2 (ja) | 組立装置及び電子機器の製造方法 | |
| CN116749167A (zh) | 控制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20931119 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022515194 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20931119 Country of ref document: EP Kind code of ref document: A1 |