WO2021157392A1 - 画像処理装置、内視鏡システム、及び画像処理方法 - Google Patents
画像処理装置、内視鏡システム、及び画像処理方法 Download PDFInfo
- Publication number
- WO2021157392A1 WO2021157392A1 PCT/JP2021/002286 JP2021002286W WO2021157392A1 WO 2021157392 A1 WO2021157392 A1 WO 2021157392A1 JP 2021002286 W JP2021002286 W JP 2021002286W WO 2021157392 A1 WO2021157392 A1 WO 2021157392A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- score
- image
- final score
- raw
- endoscopic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000094—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope extracting biological structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000096—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope using artificial intelligence
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
- A61B1/0005—Display arrangement combining images e.g. side-by-side, superimposed or tiled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0638—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements providing two or more wavelengths
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H30/00—ICT specially adapted for the handling or processing of medical images
- G16H30/40—ICT specially adapted for the handling or processing of medical images for processing medical images, e.g. editing
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/63—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for local operation
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/20—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for computer-aided diagnosis, e.g. based on medical expert systems
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/30—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for calculating health indices; for individual health risk assessment
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/70—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for mining of medical data, e.g. analysing previous cases of other patients
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00188—Optical arrangements with focusing or zooming features
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10068—Endoscopic image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30028—Colon; Small intestine
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30101—Blood vessel; Artery; Vein; Vascular
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30168—Image quality inspection
Definitions
- the present invention relates to an image processing device, an endoscopic system, and an image processing method that support diagnosis using an endoscopic image taken by an endoscope.
- diagnosis using an endoscope system equipped with a light source device, an endoscope, and a processor device is widely performed.
- diagnosis using an endoscopic system the stage of a specific disease of the observation target is performed by performing appropriate image processing on the image obtained by photographing the observation target with the endoscope (hereinafter referred to as the endoscopic image).
- CAD Computer-Aided Diagnosis
- the severity of the disease or the score associated with the pathological result is calculated in real time or near real time and displayed on a display or the like.
- Patent Document 1 an image analysis device capable of automatically discriminating between a super-magnified image and a non-magnified image for CAD using a super-magnified image in an endoscopic image.
- a stable judgment result may not be obtained because the position of the observation target in the endoscopic image is likely to change.
- the determination result may be unstable because the determination result changes finely when the observation position changes finely. Therefore, it is desired to obtain a stable determination result in order to make the CAD easier to use.
- an object of the present invention is to provide an image processing device, an endoscopic system, and an image processing method for stably displaying a determination result regarding a disease using an endoscopic image.
- the present invention is an image processing device and includes a processor.
- the processor acquires a plurality of endoscopic images obtained by imaging the observation target with an endoscope at different times, and based on each endoscopic image, determines the severity or stage of the disease to be observed.
- the related elementary score is calculated, the final score is determined based on the elementary score, and the final score and / or the time-dependent change of the final score is controlled to be displayed on the display in real time.
- the processor calculates two or more kinds of raw scores that are different from each other.
- the processor calculates the raw score based on the first feature amount obtained by analyzing the endoscopic image.
- the first feature amount is preferably an amount related to the superficial blood vessel dense part, the intramucosal bleeding part, or the extramucosal bleeding part included in the endoscopic image.
- the processor executes the trained first machine learning model generated by inputting the past endoscopic image associated with the raw score into the machine learning model, and calculates the raw score based on the endoscopic image. It is preferable to do so.
- the processor determines the final score from the raw scores calculated based on a plurality of endoscopic images acquired in a predetermined period before the time of the final score determination.
- the processor preferably determines the final score by moving average, FIR filtering, or IIR filtering a plurality of raw scores.
- the processor determines the final score based on the raw score calculated immediately before or immediately after the final score determination.
- the processor determines whether the endoscopic image is appropriate or unsuitable for the calculation of the raw score, and the raw score for the endoscopic image determined to be unsuitable for the calculation of the raw score is unsuitable. It is preferable to calculate.
- the processor determines whether the endoscopic image is appropriate or unsuitable for the calculation of the raw score based on the second feature amount of the endoscopic image.
- the second feature amount is at least one selected from the group consisting of the halation distribution, the spatial frequency distribution, the brightness value distribution, the shadow distribution, the magnifying power index, and the reflected light distribution of the illumination light irradiating the observation target.
- the amount is preferably related to.
- the processor executes a trained second machine learning model generated by inputting a past endoscopic image associated with the calculation of the raw score into the machine learning model, and executes the endoscope. It is preferable to determine whether the image is appropriate or inappropriate for the calculation of the raw score.
- the processor determines the final score based on the raw score other than the uncalculated score.
- the processor is a raw score based on a plurality of endoscopic images acquired in a predetermined period, and when the number of raw scores other than uncalculated is less than or equal to a predetermined number, the number of uncalculated raw scores is equal to or more than a predetermined number.
- the final score may not be calculated. preferable.
- the processor determines the part to be observed included in the endoscopic image by image analysis of the endoscopic image, and the change with time of the final score indicates the relationship between the final score and the determination time and part of the final score. It is preferable to display by at least one graph.
- the processor gives an instruction to acquire a still image, and when instructed, controls to display the final score and / or the time-dependent change of the final score.
- the disease is preferably ulcerative colitis.
- the present invention is an endoscope system, which includes an endoscope for imaging an observation target and an image processing device including a processor.
- the processor acquires a plurality of endoscopic images obtained by imaging the observation target at different times, and based on each endoscopic image, a raw score related to determination of the severity or stage of the observation target disease. Is calculated, the final score is determined based on the raw score, and the final score and / or the time-dependent change of the final score is controlled to be displayed on the display in real time.
- the present invention is an image processing method, which is an image acquisition step of acquiring a plurality of endoscopic images obtained by imaging observation targets at different times, and an observation target based on each endoscopic image.
- the raw score calculation step that calculates the raw score related to the determination of the severity or stage of the disease
- the final score determination step that determines the final score based on the raw score
- the time course of the final score and / or the final score It includes a display control step for controlling the display on the display in real time.
- the endoscope system 10 includes an endoscope 12, a light source device 14, a processor device 16, a display 18, and a console 19.
- the endoscope 12 is optically connected to the light source device 14 and electrically connected to the processor device 16.
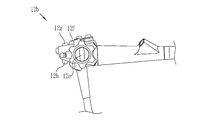
- the endoscope 12 includes an insertion portion 12a to be inserted into the body to be observed, an operation portion 12b provided at the base end portion of the insertion portion 12a, and a curved portion 12c and a tip provided on the tip end side of the insertion portion 12a. It has a part 12d.
- the curved portion 12c bends by operating the angle knob 12e (see FIG. 2) of the operating portion 12b.
- the tip portion 12d is directed in a desired direction by the bending motion of the bending portion 12c.
- the operation unit 12b gives a still image acquisition instruction to the angle knob 12e, a mode changeover switch 12g used for the observation mode switching operation, a zoom operation unit 12h for changing the imaging magnification, and a still image acquisition instruction. It has a still image acquisition instruction unit 12f.
- a console 19 or a foot switch was used in addition to the mode changeover switch 12g or the scope switch of the still image acquisition instruction unit 12f. It may be an operation or an instruction.
- the endoscope system 10 has three modes: a normal observation mode, a special observation mode, and a score display mode.
- a normal observation mode a normal image having a natural color is displayed on the display 18 by illuminating the observation target with normal light and taking an image.
- a special observation mode a special image emphasizing a specific structure is displayed on the display 18 by illuminating the observation target with special light having a wavelength band different from that of normal light and taking an image.
- the score display mode the determined score, the time course of the score, and / Alternatively, the judgment result or the like is displayed on the display.
- the severity of the disease is the degree of prognosis obtained by treatment. For example, when the disease is ulcerative colitis, it is classified into three categories: mild, moderate, and severe. When the disease is ulcerative colitis, the stage of the disease is classified into two stages, an active stage and a remission stage. Therefore, the judgment result of the severity is either mild, moderate, or severe, and the judgment result of the stage is either the active stage or the remission stage, or the remission or non-remission stage.
- the score is a recognizable display of the severity or stage of the disease to be observed, and is a numerical value, a sentence, or the like. In the present embodiment, a case where the image processing device determines remission or non-remission of ulcerative colitis will be described.
- the processor device 16 to which the endoscope 12 is connected is an image processing device that executes a score display mode.
- the image processing device includes a processor.
- programs related to the image signal acquisition unit 51, the DSP 52, the noise reduction unit 53, the signal processing unit 55, the video signal generation unit 56, and the like are incorporated in the memory.
- functions such as an image signal acquisition unit 51, a DSP 52, a noise reduction unit 53, a signal processing unit 55, and a video signal generation unit 56 are realized. ..
- the score display mode may be executed in another configuration.
- an image processing device function is provided in an external image processing system different from the endoscopic system 10, and the endoscopic image is processed by the external image processing.
- the score display mode may be executed by inputting to the device, and the execution result may be displayed on an external display connected to an external image processing system.
- the processor device 16 is electrically connected to the display 18 and the console 19.
- the display 18 outputs and displays an image to be observed, a score, a change over time in the score, a determination result, and / or information incidental to the image to be observed.
- the console 19 functions as a user interface that accepts input operations such as function settings.
- An external recording unit (not shown) for recording an image, image information, or the like may be connected to the processor device 16.
- the light source device 14 emits illumination light to irradiate the observation target. It includes a light source unit 20 and a light source control unit 21 that controls the light source unit 20.
- the light source unit 20 is composed of, for example, a semiconductor light source such as a multi-color LED (Light Emitting Diode), a combination of a laser diode and a phosphor, or a halogen light source such as a xenon lamp.
- the light source unit 20 includes an optical filter or the like for adjusting the wavelength band of light emitted by an LED or the like.
- the light source control unit 21 controls the amount of illumination light by turning on / off each LED and adjusting the drive current and drive voltage of each LED and the like. Further, the light source control unit 21 controls the wavelength band of the illumination light by changing the optical filter or the like.
- the light source unit 20 includes V-LED (Violet Light Emitting Diode) 20a, B-LED (Blue Light Emitting Diode) 20b, and G-LED (Green Light Emitting Diode) 20c.
- R-LED (Red Light Emitting Diode) 20d has four color LEDs.
- the V-LED 20a generates purple light V having a center wavelength of 405 ⁇ 10 nm and a wavelength range of 380 to 420 nm.
- the B-LED 20b generates blue light B having a center wavelength of 460 ⁇ 10 nm and a wavelength range of 420 to 500 nm.
- the G-LED 20c generates green light G having a wavelength range of 480 to 600 nm.
- the R-LED20d generates red light R having a center wavelength of 620 to 630 nm and a wavelength range of 600 to 650 nm.
- the purple light V is a short wavelength light used for detecting a superficial blood vessel dense part, an intramucosal bleeding part, or an extramucosal bleeding part used in the score display mode, and includes 410 nm in the center wavelength or the peak wavelength. Is preferable. Therefore, it is preferable that the endoscopic image used in the score display mode is an image of an observation target illuminated by purple light V.
- the light source control unit 21 controls the V-LED20a, B-LED20b, G-LED20c, and R-LED20d.
- the light source control unit 21 emits normal light having a light intensity ratio of Vc: Bc: Gc: Rc among purple light V, blue light B, green light G, and red light R.
- Vc light intensity ratio of Vc: Bc: Gc: Rc among purple light V, blue light B, green light G, and red light R.
- Each LED 20a to 20d is controlled.
- the light source control unit 21 has a light intensity ratio of Vs: Bs: Gs: of purple light V as short wavelength light and blue light B, green light G, and red light R.
- Each LED 20a to 20d is controlled so as to emit special light that becomes Rs.
- the special light preferably emphasizes surface blood vessels and the like. Therefore, as the light intensity ratio Vs: Bs: Gs: Rs of the special light, it is preferable that the light intensity of the purple light V is larger than the light intensity of the blue light B.
- the ratio of the light intensity Vs of purple light V and the light intensity Bs of blue light B is set to "4: 1".
- the light intensity ratio between the purple light V, the blue light B, the green light G, and the red light R is set to 1: 0: 0: 0, and the light has a short wavelength. May emit only the purple light V as.
- the light intensity ratio includes the case where the ratio of at least one semiconductor light source is 0 (zero). Therefore, this includes the case where any one or more of the semiconductor light sources are not lit. For example, as in the case where the light intensity ratio between purple light V, blue light B, green light G, and red light R is 1: 0: 0: 0, only one of the semiconductor light sources is turned on, and the other three are turned on. Even if one does not light up, it shall have a light intensity ratio.
- the light emitted by each of the LEDs 20a to 20e is incident on the light guide 41 via an optical path coupling portion (not shown) composed of a mirror, a lens, or the like.
- the light guide 41 is built in the endoscope 12 and the universal cord (the cord connecting the endoscope 12, the light source device 14, and the processor device 16).
- the light guide 41 propagates the light from the optical path coupling portion to the tip portion 12d of the endoscope 12.
- the illumination optical system 30a and an imaging optical system 30b are provided at the tip portion 12d of the endoscope 12.
- the illumination optical system 30a has an illumination lens 42, and the illumination light propagated by the light guide 41 is applied to the observation target through the illumination lens 42.
- the image pickup optical system 30b includes an objective lens 43, a zoom lens 44, and an image pickup sensor 45.
- Various types of light such as reflected light, scattered light, and fluorescence from the observation target are incident on the image pickup sensor 45 via the objective lens 43 and the zoom lens 44.
- an image to be observed is formed on the image sensor 45.
- the zoom lens 44 freely moves between the telephoto end and the wide-angle end by operating the zoom operation unit 12h, and enlarges or reduces the observation target to be imaged on the image sensor 45.
- the image pickup sensor 45 is a color image pickup sensor provided with any of R (red), G (green), or B (blue) color filters for each pixel, and images an observation target to image signals of each RGB color. Is output.
- a CCD (Charge Coupled Device) image sensor or a CMOS (Complementary Metal-Oxide Semiconductor) image sensor can be used.
- a complementary color image sensor provided with complementary color filters of C (cyan), M (magenta), Y (yellow) and G (green) may be used. ..
- CMYG four-color image signals are output.
- an RGB image signal similar to that of the image sensor 45 can be obtained by converting the image signals of the four colors of CMYG into the image signals of the three colors of RGB by the complementary color-primary color conversion. Further, instead of the image sensor 45, a monochrome sensor without a color filter may be used.
- the image pickup sensor 45 is driven and controlled by an image pickup control unit (not shown).
- the control by the image pickup control unit is different for each mode.
- the image pickup control unit controls the image pickup sensor 45 so as to take an image of the observation target illuminated by the normal light.
- the Bc image signal is output from the B pixel of the image sensor 45
- the Gc image signal is output from the G pixel
- the Rc image signal is output from the R pixel.
- the image pickup control unit controls the image pickup sensor 45 so as to take an image of the observation target illuminated by the special light.
- the Bs image signal is output from the B pixel of the image sensor 45
- the Gs image signal is output from the G pixel
- the Rs image signal is output from the R pixel.
- the CDS / AGC (Correlated Double Sampling / Automatic Gain Control) circuit 46 performs correlated double sampling (CDS) and automatic gain control (AGC) on the analog image signal obtained from the image sensor 45.
- CDS correlated double sampling
- AGC automatic gain control
- the image signal that has passed through the CDS / AGC circuit 46 is converted into a digital image signal by the A / D (Analog / Digital) converter 48.
- the digital image signal after A / D conversion is input to the processor device 16.
- the processor device 16 includes an image signal acquisition unit 51, a DSP (Digital Signal Processor) 52, a noise reduction unit 53, a memory 54, a signal processing unit 55, and a video signal generation unit 56.
- the signal processing unit 55 includes a normal image generation unit 61, a special image generation unit 62, and a score processing unit 63.
- the image signal acquisition unit 51 acquires a digital image signal of the endoscope image input from the endoscope 12.
- the acquired image signal is transmitted to the DSP 52.
- the DSP 52 performs various signal processing such as defect correction processing, offset processing, gain correction processing, linear matrix processing, gamma conversion processing, demosaic processing, and YC conversion processing on the received image signal.
- defect correction process the signal of the defective pixel of the image sensor 45 is corrected.
- the offset processing the dark current component is removed from the image signal subjected to the defect correction processing, and an accurate zero level is set.
- the gain correction process adjusts the signal level of each image signal by multiplying the image signal of each color after the offset process by a specific gain.
- the image signal of each color after the gain correction processing is subjected to linear matrix processing that enhances color reproducibility. After that, the brightness and saturation of each image signal are adjusted by the gamma conversion process.
- the image signal after the gamma conversion process is subjected to demosaic processing (also referred to as isotropic processing or simultaneous processing), and a signal of the missing color of each pixel is generated by interpolation. By the demosaic process, all the pixels have signals of each color of RGB.
- the DSP 52 performs YC conversion processing on each image signal after demosaic processing, and outputs the luminance signal Y, the color difference signal Cb, and the color difference signal Cr to the noise reduction unit 53.
- the noise reduction unit 53 performs noise reduction processing by, for example, a moving average method, a median filter method, or the like on an image signal that has undergone demosaic processing or the like by DSP 52.
- the image signal with reduced noise is stored in the memory 54.
- the signal processing unit 55 acquires the image signal after noise reduction from the memory 54. Then, the acquired image signal is subjected to signal processing such as color conversion processing, color enhancement processing, and structure enhancement processing as necessary to generate a color endoscopic image in which the observation target is captured.
- the color conversion process is a process of converting an image signal by a 3 ⁇ 3 matrix process, a gradation conversion process, a three-dimensional LUT (look-up table) process, or the like.
- the color enhancement process is performed on the image signal that has undergone the color conversion process.
- the structure enhancement process is a process for emphasizing a specific tissue or structure included in an observation target such as a blood vessel or a pit pattern, and is performed on an image signal after the color enhancement process.
- the signal processing unit 55 includes a normal image generation unit 61, a special image generation unit 62, and a score processing unit 63.
- the signal processing unit 55 sets the transmission destination of the image signal from the noise reduction unit 53 to any one of the normal image generation unit 61, the special image generation unit 62, and the score processing unit 63, depending on the set mode. Specifically, for example, when the normal observation mode is set, the image signal is input to the normal image generation unit 61. When the special observation mode is set, the image signal is input to the special image generation unit 62. When the score display mode is set, the image signal is input to the score processing unit 63.
- the normal image generation unit 61 performs normal image image processing on the input Rc image signal, Gc image signal, and Bc image signal for one frame.
- Image processing for normal images includes 3 ⁇ 3 matrix processing, gradation conversion processing, color conversion processing such as three-dimensional LUT (Look Up Table) processing, color enhancement processing, and structure enhancement processing such as spatial frequency enhancement. Is done.
- the Rc image signal, the Gc image signal, and the Bc image signal that have undergone image processing for a normal image are input to the video signal generation unit 56 as normal images.
- the special image generation unit 62 performs special image image processing on the input Rs image signal, Gs image signal, and Bs image signal for one frame.
- Image processing for special images includes 3 ⁇ 3 matrix processing, gradation conversion processing, color conversion processing such as three-dimensional LUT processing, color enhancement processing, and structure enhancement processing such as spatial frequency enhancement.
- the Rs image signal, the Gs image signal, and the Bs image signal that have undergone image processing for special images are input to the video signal generation unit 56 as special images.
- the endoscopic image generated by the signal processing unit 55 is a normal observation image when the observation mode is the normal observation mode, and is a special observation image when the observation mode is the special observation mode. Therefore, color conversion processing and color enhancement are performed.
- the contents of the process and the structure enhancement process differ depending on the observation mode.
- the signal processing unit 55 In the normal observation mode, the signal processing unit 55 generates the normal observation image by performing the various signal processings described above so that the observation target has a natural hue.
- the signal processing unit 55 In the special observation mode, the signal processing unit 55 generates a special observation image by performing at least the various signal processings that emphasize the blood vessels to be observed.
- blood vessels in the special observation image generated by the signal processing unit 55, blood vessels (so-called superficial blood vessels) or blood located at a relatively shallow position in the observation target with respect to the surface of the mucous membrane have a magenta color (for example, brown color). Blood vessels located relatively deep in the observation target with respect to the surface of the mucosa (so-called middle-deep blood vessels) have a cyan-based color (for example, green). Therefore, the blood vessels or bleeding (blood) to be observed are emphasized by the difference in color with respect to the mucous membrane represented by the pinkish color.
- magenta color for example, brown color
- middle-deep blood vessels have a cyan-based color (for example, green). Therefore, the blood vessels or bleeding (blood) to be observed are emphasized by the difference in color with respect to the mucous membrane represented by the pinkish color.
- the video signal generation unit 56 converts a normal image, a special image, a final score determined by the score processing unit 63, etc. output from the signal processing unit 55 into a video signal that can be displayed in full color on the display 18.
- the converted video signal is input to the display 18.
- a normal image, a special image, a final score, or the like is displayed on the display 18.
- the signal processing unit 55 stores the generated endoscopic image in the image storage unit 75 (see FIG. 8) or storage. Save in (not shown).
- the storage is an external storage device connected to the processor device 16 such as a LAN (Local Area Network), and is, for example, a file server of a system for filing an endoscopic image such as a PACS (Picture Archiving and Communication System, see FIG. 21). , NAS (Network Attached Storage), etc.
- LAN Local Area Network
- PACS Picture Archiving and Communication System
- NAS Network Attached Storage
- the score processing unit 63 determines the final score and controls to display the final score and / or the time-dependent change of the final score on the display 18 in real time. As shown in FIG. 8, the score processing unit 63 includes an image acquisition unit 71, a raw score calculation unit 72, a final score determination unit 73, and a display control unit 76. Further, an unsuitable image discrimination unit 74, an image storage unit 75, and a site determination unit 77 may be provided.
- the image acquisition unit 71 automatically acquires a plurality of endoscope images obtained by imaging observation targets with the endoscope 12 at different times.
- the image acquisition unit 71 acquires a special observation image in which blood vessels and the like are emphasized.
- the image acquisition unit 71 may acquire an endoscopic image from the storage as the case may be.
- the endoscopic image acquired by the image acquisition unit 71 is sent to the raw score calculation unit 72, the inappropriate image discrimination unit 74, or the image storage unit 75.
- the elementary score calculation unit 72 calculates the elementary score related to the determination of the severity or stage of the disease to be observed based on the plurality of endoscopic images acquired by the image acquisition unit 71.
- the elementary score related to the determination of the severity or stage of the disease to be observed shall be a numerical value recognizable as to the severity or stage of the disease to be observed included in the endoscopic image.
- the raw score calculation unit 72 can include one or both of the first calculation unit 81 (see FIG. 8) and the second calculation unit 82 (see FIG. 8).
- the elementary score calculation unit 72 calculates the elementary score based on the feature amount (first feature amount) obtained by analyzing the endoscopic image in the first calculation unit 81.
- the characteristic amounts include, for example, the number of blood vessels, thickness, length, number of branches, branch angle, distance between branch points, number of intersections, inclination, density, color, blood concentration, oxygen saturation, presence / absence of bleeding, and bleeding. Examples include a characteristic amount related to blood vessels such as area or flow rate, or a characteristic amount related to mucosal color.
- the amount related to the superficial blood vessel dense part, the intramucosal bleeding part, and the extramucosal bleeding part included in the endoscopic image is preferably mentioned.
- the surface layer blood vessel dense part the blood vessel to be observed is extracted from the endoscopic image by an image analysis of the endoscopic image with a frequency filter or the like, and the number of pixels of the part where the blood vessel is dense in the endoscopic image is determined. The counted value is used as the raw score.
- the intramucosal or extramucosal bleeding part the intramucosal or extramucosal bleeding to be observed is extracted from the endoscopic image by the value of G value with respect to the R value proportional to the amount of hemoglobin, and the endoscopic image.
- the value obtained by counting the number of pixels in the intramucosal or extramucosal bleeding portion in the above is taken as the raw score.
- the ulcerative colitis which is a disease determined by the present embodiment, has the present invention in which the pattern of vascular structure changes as the severity worsens. Is finding out.
- the pattern of superficial blood vessels 85 is regular (FIG. 9 (A)), or the pattern of superficial blood vessels 85 is regular. There is some turbulence in the large intestine (Fig. 9 (B)).
- the raw score calculation unit 72 can calculate the raw score by utilizing the above-mentioned pattern change of the blood vessel structure.
- the surface blood vessel dense portion refers to a state in which the surface blood vessels meander and gather, and in the appearance on the image, a number of surface blood vessels surround the intestinal gland bulk (crypt) (see FIG. 10).
- Intramucosal bleeding refers to intramucosal bleeding (see FIG. 10) that requires differentiation from luminal bleeding.
- Intramucosal bleeding refers to bleeding that is not in the mucosa and in the lumen (lumen, pleated hole) in appearance on the image.
- Extramucosal bleeding is accompanied by a small amount of blood into the lumen, blood that oozes out of the lumen in front of the endoscope or is visible after cleaning the lumen, or bleeding on the hemorrhagic mucosa. It refers to the blood in the lumen.
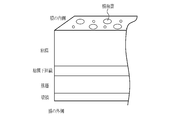
- the elementary score calculation unit 72 classifies the superficial blood vessel dense part, the intramucosal bleeding part, or the extramucosal bleeding part according to the frequency characteristic and the brightness value obtained from the special observation image. Specifically, the superficial blood vessel dense part, the intramucosal bleeding part, or the extramucosal bleeding part is classified as shown in FIG.
- the density of superficial blood vessels is represented by a low luminance value and a high frequency characteristic.
- Intramucosal hemorrhage is represented by a medium brightness value and a medium frequency characteristic.
- Extramucosal hemorrhage is represented by a low luminance value and a low frequency characteristic.
- the blurred dark part of the special observation image or Endoscopic shadows are also included.
- superficial vascular congestion, intramucosal bleeding, and extramucosal bleeding necessary for determining remission or non-remission of ulcerative colitis from superficial vascular congestion, intramucosal bleeding, or extramucosal bleeding Is extracted.
- the spatial frequency component distribution is calculated by applying a Laplacian filter to the special observation image. Based on the spatial frequency component distribution, for example, when the standard deviation of the frequencies of nine nearby pixels including the specific pixel is equal to or less than a certain value, the specific pixel is defined as a pixel belonging to the low frequency region.
- the high frequency region is extracted by Hesian analysis for the spatial frequency component distribution.
- the portion of the special observation image excluding the low frequency region and the high frequency region is defined as the medium frequency region. In this way, by classifying the pixels of the special observation image according to the spatial frequency and the brightness value, the number of pixels of the superficial blood vessel dense part, the intramucosal bleeding part, or the extramucosal bleeding part can be calculated.
- the disease is ulcerative colitis because the severity or stage of the disease can be satisfactorily determined by the above configuration.
- the raw score calculated based on the different first feature amount is a different kind of raw score.
- the raw score calculation unit 72 may calculate one kind of raw score or two or more kinds of raw scores.
- the raw score calculation unit 72 calculates the raw score based on the endoscopic image in the second calculation unit 82.
- the second calculation unit 82 includes a trained first machine learning model.
- the trained first machine learning model is generated by inputting a past endoscopic image associated with a raw score into the machine learning model. That is, it is a machine learning model generated by inputting a past endoscopic image into a machine learning model and learning so that the associated elementary score is output correctly. Therefore, “learned” includes adjusting various parameters in addition to inputting the past endoscopic image associated with the score into the machine learning model.
- the elemental score associated with the past endoscopic image may be, for example, a feature amount, or may be a numerical value of the severity or stage of the disease to be observed.
- the first machine learning model may include two or more types of machine learning models corresponding to each feature amount, and may calculate two or more types of elementary scores.
- the final score determination unit 73 determines the final score based on the raw score.
- the raw score calculated by the raw score calculation unit 72 is an amount related to the determination of the severity or stage of the disease, and is an index of how much the disease is a symptom or how far the stage of the disease is advanced. Is. Therefore, the method of determining the final score may be adjusted according to the purpose of the determination and the like. For example, when determining the degree of severity or the progress of a stage, the final score is set in the direction in which the raw score value is large, the severity is high, and the stage is advanced, and the disease worsens most. Determine the severity or stage of the affected area.
- the final score is determined by setting a threshold value in advance for each of the three types of elementary scores, for example, the number of pixels in the superficial blood vessel dense area, the number of pixels in the intramucosal bleeding area, and the number of pixels in the extramucosal bleeding area.
- the method of determining the score and the like can be mentioned.
- the threshold value is set low.
- the display control unit 76 controls to display the final score and / or the time-dependent change of the final score on the display 18 in real time.
- the final score is, for example, a graph in which the numerical value of the final score is displayed on the display 18 in real time, the vertical axis is the final score value, and the horizontal axis is the passage of time.
- a method of displaying the score as a change over time in a graph format, or displaying a message notifying the severity of the disease or the judgment result of the stage by the value of the final score and the preset threshold value can be mentioned.
- the display control unit 76 also controls not to display the final score or the like. For example, if the final score is smaller than the preset threshold, the final score is not displayed. Note that displaying in real time means displaying immediately, and does not mean displaying at exactly the same time.
- the score processing unit 63 configured as described above determines the final score using the raw score and then displays it on the display 18, the change in the raw score is not displayed as it is on the display 18, and the raw score is not displayed as it is.
- the score is controlled not to display the final score, so when the score is displayed, it is displayed as a more stable score.
- the image processing apparatus does not cause the final score to fluctuate even if the observation target changes finely, and more stable and robust score calculation and display of the final score and the like are performed. Therefore, the image processing device contributes to the prevention of oversight of the lesion of the user who performs the observation or the simpler observation.
- the score processing unit 63 may include an unsuitable image discrimination unit 74.
- the unsuitable image discrimination unit 74 determines whether the endoscopic image is appropriate or unsuitable for the calculation of the raw score. By discrimination, the endoscopic image is either appropriate or inappropriate.
- the endoscopic image may be unsuitable as an image for calculating the raw score. For example, in the endoscopic image, there were many blurred parts because the tip 12d of the endoscope was photographed while moving, causing blurring, water droplets adhering to the image, and the observation target was slanted. Or, an extreme value may be calculated when the raw score is calculated because only the distant view is photographed and the observation target is hardly included. Such endoscopic images, for which an inappropriate score may be calculated, are unsuitable for the calculation of the raw score.
- the score processing unit 63 can include one or both of the first determination unit 83 (see FIG. 8) and the second determination unit 84 (see FIG. 8).
- the first discrimination unit 83 determines whether the endoscopic image is appropriate or unsuitable for the calculation of the raw score based on the feature amount (second feature amount) obtained by analyzing the endoscopic image.
- the feature amount is at least one selected from the halation distribution, the spatial frequency distribution, the brightness value distribution, the shadow distribution, the magnification index, and the reflected light distribution of the illumination light irradiating the observation target. It is preferably a related amount.
- the area where halation occurs or the area of shadow due to the hood of the endoscope is an extremely bright or dark area. Therefore, an endoscopic image having many of these areas is calculated as a raw score. It is not suitable for. An endoscopic image with many extremely bright or dark areas due to the brightness value distribution or the shadow distribution is also unsuitable for calculating the raw score. An endoscopic image in which the image is often blurred due to the spatial frequency distribution is unsuitable for calculating the raw score because it is an image in which blurring occurs or the image is out of focus.
- the enlargement ratio is large with reference to the enlargement ratio index, for example, when the surface layer blood vessel dense part is calculated, the appearance of blood vessels changes and the blood vessel density per unit area also changes as compared with the case where no enlargement occurs. do. Therefore, it is good to calculate the raw score in consideration of the enlargement ratio, but otherwise it is not suitable for calculating the raw score.
- the observation target is changed to a different type due to a change in the observation site or the like, the reflected light distribution of the illumination light irradiating the observation target may change. An endoscopic image in which there are many extremely bright or dark areas due to changes in the reflected light distribution is also unsuitable for calculating the raw score.
- the value calculated based on the different second feature amount shall be a different type of second feature amount.
- the first discrimination unit 83 may calculate one type of the second feature amount, or may calculate two or more types.
- the first discriminating unit 83 discriminates whether the endoscopic image is appropriate or unsuitable for the calculation of the raw score by using one kind or two or more kinds of second feature quantities.
- the unsuitable image discriminating unit 74 determines in the second discriminating unit 84 whether it is appropriate or unsuitable for the calculation of the raw score based on the endoscopic image.
- the second discriminating unit 84 includes a trained second machine learning model.
- the trained second machine learning model is generated by inputting a past endoscopic image associated with the calculation of the raw score into the machine learning model. That is, it is an opportunity learning model generated by inputting a past endoscopic image into an opportunity learning model so as to correctly output whether it is appropriate or inappropriate for the calculation of a raw score. Therefore, “learned” includes the adjustment of various parameters in addition to inputting the past endoscopic images associated with the calculation of the raw score into the machine learning model. ..
- the endoscopic image determined to be appropriate for the calculation of the raw score by the unsuitable image discrimination unit 74 is sent to the raw score calculation unit 72 to calculate the raw score.
- An endoscopic image that is determined to be unsuitable for the calculation of the raw score is regarded as "not calculated” as the raw score. That is, since the raw score is labeled as "not calculated", it is distinguished from the endoscopic image for which the raw score has not been calculated yet.
- the final score determination unit 73 determines the final score from the raw scores calculated based on a plurality of endoscopic images acquired in a predetermined period before the time of the final score determination.
- the determination of the final score in this case will be specifically described with reference to FIG.
- FIG. 12 the flow from the start of observation by the endoscope is shown in the upper part, and the appearance of the obtained endoscopic image is shown in the lower part.
- Observation with an endoscope is started, and endoscopic image acquisition 101 starts from S at the start of observation.
- the image signal acquisition unit 51 automatically performs endoscopic image acquisition 101 at a predetermined image acquisition interval a. As soon as the endoscopic image acquisition 101 is performed, the raw score of the endoscopic image is calculated.
- the endoscopic image acquisition 101 is indicated by a filled circle, but only a part thereof is coded in order to avoid complicating the figure. Further, also for the period a, only a part of the period a is coded in order to avoid complicating the figure.
- the final score is determined based on the endoscopic image acquired in the period ⁇ t before the final score determination time t, which is the determination time of the final score.
- the period ⁇ t is a predetermined period and is set in advance.
- the first endoscopic image acquired during the period ⁇ t is the endoscopic image 121 acquired at the time t ⁇ t.
- the endoscopic image 121 included an intramucosal hemorrhagic site 126 and a vascularized area 127.
- the intramucosal hemorrhagic portion 126 and the blood vessel dense portion 127 are shown by diagonally shaded portions and shaded portions, respectively, but only a part thereof is indicated in order to avoid complicating the drawings.
- the unsuitable image discriminating unit 74 determines whether it is appropriate or unsuitable for the calculation of the raw score using the period B, and is unsuitable.
- the discrimination result is obtained at the time of the image discrimination 102.
- the discrimination result was "appropriate".
- the raw score calculation unit 72 calculated the raw score in the endoscopic image 121 using the period C, and obtained the calculation result at the time of the raw score calculation 103.
- the elementary score calculation unit is the first calculation unit 81 for two types, the number of pixels of the intramucosal and extramucosal bleeding part (hereinafter referred to as the number of bleeding part pixels) and the number of blood vessel dense part pixels (hereinafter referred to as the number of dense part pixels).
- the raw score was calculated by.
- the calculation results were "the number of pixels in the bleeding part: 100" and "the number of pixels in the dense part: 70".
- the second primary score is calculated for the endoscopic image 122 acquired at time t ⁇ t + 4a.
- the endoscopic image 122 included an intramucosal bleeding section 126, a vascular dense section 127, and an extramucosal bleeding section 128.
- the extramucosal bleeding portion 128 is indicated by a filled circle, but only a part thereof is designated in order to avoid complicating the figure.
- the unsuitable image discriminating unit 74 determines whether it is appropriate or unsuitable for the calculation of the raw score using the period B, and is unsuitable.
- the discrimination result is obtained at the time of image discrimination 104.
- the discrimination result was "appropriate".
- the raw score calculation unit 72 calculated the raw score in the endoscopic image 122 using the period C, and obtained the calculation result at the time of the raw score calculation 105.
- the raw score calculation unit calculated the raw score by the first calculation unit 81 for two types, the number of pixels in the bleeding part and the number of pixels in the dense part. The calculation results were "the number of pixels in the bleeding part: 120" and "the number of pixels in the dense part: 90".
- the third element score is calculated for the endoscopic image 123 acquired at time t ⁇ t + 8a. Since the endoscope image 123 was acquired while the endoscope was moving, it was an unclear image 129 in which the observation target was blurred, and the observation target could not be identified. With respect to the endoscopic image 123 obtained by the endoscopic image acquisition 101 at time t ⁇ t + 8a, the unsuitable image discriminating unit 74 determines whether it is appropriate or unsuitable for the calculation of the raw score using the period B, and is unsuitable. The discrimination result is obtained at the time of image discrimination 106. The discrimination result was "inappropriate".
- the raw score calculation unit 72 does not calculate the raw score because the result of the unsuitable image discrimination is "inappropriate". That is, the calculation result of the raw score was "not calculated".
- the fourth element score is calculated for the endoscopic image 124 acquired at time t ⁇ t + 12a.
- the endoscopic image 124 included an intramucosal bleeding section 126, a blood vessel congested section 127, and an extramucosal bleeding section 128.
- the unsuitable image discriminating unit 74 determines whether it is appropriate or unsuitable for the calculation of the raw score using the period B, and is unsuitable.
- the discrimination result is obtained at the time of image discrimination 108.
- the discrimination result was "appropriate".
- the raw score calculation unit 72 calculated the raw score in the endoscopic image 124 using the period C, and obtained the calculation result at the time of the raw score calculation 109.
- the raw score calculation unit calculated the raw score by the first calculation unit 81 for two types, the number of pixels in the bleeding part and the number of pixels in the dense part. The calculation results were "the number of pixels in the bleeding part: 140" and "the number of pixels in the dense part: 140".
- the endoscopic image acquired in the period ⁇ t is related to the image acquisition interval a, the period of inappropriate image discrimination by the inappropriate image discrimination unit 74, and the period of raw score calculation by the raw score calculation unit 72.
- Endoscopic images 121, 122, 123, and 124 it is preferable that the final score determination unit 73 determines the final score based on the raw scores other than "uncalculated" among these endoscopic images. Therefore, the final score determination unit 73 determines the final score from the respective raw scores calculated based on the three endoscopic images 121, 122, and 124.
- the final score determination unit 73 determines the final score by moving average, FIR (finite impulse response) filtering, or IIR (Infinite impulse response) filtering of a plurality of raw scores.
- the moving average is preferably any of a simple moving average, a weighted moving average, an exponential moving average, or a triangular moving average.
- weighting is used in the moving average, a value determined in advance so as to obtain a preferable result can be set and used depending on the observation site, the difference in the conditions for acquiring the endoscopic image, and the like.
- the final score can be determined in a plurality of raw scores with less influence of noise such as raw scores of extremely distant values. Therefore, the final score is stably determined.
- the final score determination time t for example, when the final score is obtained by a simple moving average of the raw scores and the raw score is the number of pixels of the bleeding part, the number of pixels of the bleeding parts in the endoscopic images 121, 122, and 124 is averaged. do. That is, the first type of final score is the number of bleeding part pixels 100 of the endoscopic image 121, the number of bleeding part pixels 120 of the endoscopic image 122, and the endoscopic image as shown in the following formula (1). The number of pixels of the bleeding portion 140 of 124 is averaged to 120.
- the second type of final score is as follows, as shown in the following formula (2), the number of pixels of the bleeding part of the endoscope image 121 is 100, the number of pixels of the bleeding part of the endoscope image 122 is 120, and the endoscope. The number of pixels of the bleeding portion 140 in the image 124 is averaged to 100.
- the interval for determining the final score may be automatically determined, or the final score at the instructed time may be determined by instruction.
- the instruction for example, the time when the user acquires the still image by the still image acquisition instruction unit 12f (freeze button) may be set as the final score determination time t. Therefore, in this case, the display control unit 76 controls to display the change with time of the final score and / or the final score when the still image acquisition instruction unit 12f gives a still image acquisition instruction.
- the observation target for which the user saves a still image often includes a region of interest. It is preferable to determine the final score in such an area and display it on the display 18 because it contributes to a more appropriate diagnosis of the user.
- the display control unit 76 controls to display the final score and / or the time-dependent change of the final score on the display 18 in real time.
- a display control method a method capable of stably displaying the determination result of the final score is preferable. Therefore, for example, the display control unit 76 displays the final score having the largest numerical value among the final scores from the start of observation, and updates the display of the final score when a final score larger than the previous numerical values is obtained. Examples thereof include a method and a method of displaying the change over time of the final score.
- the change over time of the final score it is preferable to display it as a graph.
- the graph is preferably displayed by at least one graph showing the relationship between the final score and the final score determination time.
- the display control unit 76 controls whether or not to display the final score according to the threshold value at the final score determination time t described above.
- the threshold value T1 for the number of pixels in the bleeding part was set to 800
- the threshold value T2 for the number of pixels in the dense part was set to 40. Since the final score of the number of bleeding part pixels at the final score determination time t was 120, it is smaller than the threshold value T1 of 800. Therefore, the number of bleeding part pixels at the final score determination time t is not plotted on the graph 131 of the number of bleeding part pixels which is the final score.
- the graph 132 of the number of dense part pixels, which is the final score is plotted with an auxiliary line 133 attached so that the numerical value can be grasped at a glance by the number of dense part pixels at the final score determination time t.
- the threshold value T1 or the threshold value T2 is indicated by diagonal lines.
- the display control unit 76 By controlling the display control unit 76 to display the final score and / or the time-dependent change of the final score on the display 18 in real time, the user can worsen the disease even while observing the observation target. You can see at a glance what the item you think is. also. By showing the change over time in a graph, it is possible to grasp the approximate position of the part that seems to be the worst. Further, by controlling the display of the final score by the threshold value, only the item in which the disease is considered to be the most aggravated is displayed, so that the display of the final score can be made more stable.
- the graph displayed on the display 18 may be limited to one or the like. Specifically, for example, when one of the two types of final scores is equal to or higher than the threshold value and the other is less than the threshold value, only the graph of the final score which is equal to or higher than the threshold value is displayed. By carefully selecting and displaying the types of parameters such as the final score, the reliability or stability of the displayed final score is improved. In addition, the user can grasp information for diagnosing the severity or stage at a glance.
- a part determination unit 77 for determining the part to be observed included in the endoscopic image by image analysis of the endoscopic image is provided, and the change with time of the final score can be checked with the final score and the final score. It may be displayed by a graph showing the relationship between the determination time and the part. As a result, the endoscopic image is automatically analyzed, and the part name is displayed corresponding to the display of the change with time of the final score.
- FIG. 14 for example, in observing the large intestine, when screening while pulling the endoscope from the part of the cecum at the back of the large intestine, "cecum, ascending colon, transverse colon, descending colon, sigmoid colon, A site name 134 such as "rectum” is displayed. By displaying the site name 134 in this way, it is possible to grasp the part where the disease is exacerbated in the observation without omission, which is preferable.
- the final score determination unit 73 may determine the final score based on the raw score calculated immediately before or after the time of the final score determination. The determination of the final score in these cases will be specifically described with reference to FIGS. 15 and 16. As shown in FIG. 15, in the method of determining the final score based on the raw score calculated immediately before the time of determining the final score, the final score is determined instead of using a plurality of raw scores. The decision is made based on the raw score calculated immediately before the time of the decision. That is, the raw score calculated immediately before the time when the final score is determined is determined as the final score. The endoscopic image acquisition and the raw score acquisition are the same as described above.
- the raw score calculated immediately before the final score determination time t is calculated at the time of the raw score calculation 109 based on the endoscopic image acquired by the endoscopic image acquisition at the time t ⁇ t + 12a, “bleeding portion”. Since the number of pixels is 140 and the number of pixels in the dense area is 140, the final score is the number of pixels in the bleeding area: 140 and the number of pixels in the dense area: 140.
- the display of the final score using the threshold value by the display control unit 76 is the same as described above. Therefore, as shown in FIG. 15, the display 18 displays a graph 132 of the number of dense part pixels in which the number of dense part pixels is plotted at 140 as the final score.
- the final score is determined.
- the final score is determined based on the raw score calculated immediately after the final score determination time t. That is, the raw score calculated immediately after the final score determination time t is determined as the final score.
- This is a raw score calculated for the endoscopic image acquired at the final score determination time t.
- the endoscopic image acquisition and the raw score acquisition are the same as described above.
- the raw score calculated immediately after the final score determination time t is calculated at the time of the raw score calculation 111 based on the endoscopic image acquired by the endoscopic image acquisition at the time t, "Number of bleeding part pixels”. : 160 ”and“ the number of pixels in the dense area: 70 ”, so the final score is“ the number of pixels in the bleeding area: 160, the number of pixels in the dense area: 70 ”.
- the display of the final score using the threshold value by the display control unit 76 is the same as described above. Therefore, as shown in FIG. 16, the display 18 displays a graph 132 of the number of dense part pixels in which the number of dense part pixels is plotted at 70 as the final score.
- the method of determining the final score based on the raw score calculated immediately before or immediately after the final score determination is suitable when it is desired to grasp the final score of the observation target currently being observed. Moreover, it is preferable because the latest final score can be displayed in a stable manner.
- the final score is determined based on the raw score calculated immediately before or after the time when the final score is determined.
- the final score based on the observation site for which the still image acquisition instruction is given which is the area that the user wants to pay attention to, can be displayed quickly and stably. Therefore, the final score is displayed at the timing when the user wants to obtain information on the diagnosis, which is preferable because it responds to the user's needs.
- the final score determination unit 73 includes the number of raw scores that were not calculated by the inappropriate image discrimination unit 74 among the raw scores based on the plurality of endoscopic images acquired during the predetermined period, and the calculated raw scores. You may decide whether to calculate or not to calculate the final score from the number of. Specifically, among the raw scores based on a plurality of endoscopic images acquired in a predetermined period, when the number of raw scores other than uncalculated is less than or equal to the predetermined number, the number of uncalculated raw scores is the predetermined number. In the above cases, or when the ratio of the number of uncalculated raw scores to the number of raw scores based on multiple endoscopic images acquired in a predetermined period is equal to or greater than the predetermined value, the final score is "not calculated". And.
- the endoscopic image acquisition 101 is automatically performed at the image acquisition interval a, and the time t ⁇ t, the time t ⁇ t + 4a, the time t ⁇ t + 8a, and the time t.
- An endoscopic image is acquired at ⁇ t + 12a.
- the unsuitable image discrimination unit 74 determines whether the endoscopic image acquired at each time after the period B is appropriate or unsuitable for the calculation of the raw score.
- the endoscopic images 122 and 123 acquired at the time t- ⁇ t + 4a and the time t- ⁇ t + 8a were unclear images 129, so that the raw score calculation unit 72 is the endoscopic image.
- the raw score was set to "not calculated" for each of 122 and 123.
- the final score when the number of elementary scores other than uncalculated is 2 or less among the elementary scores based on a plurality of endoscopic images acquired in a predetermined period, the final score is defined as "uncalculated”. Therefore, in this case, since there are four plurality of endoscopic images, two uncalculated raw scores, and two non-calculated raw scores, "a raw score other than uncalculated raw score". When the number of is 2 or less ”corresponds. Therefore, the final score at the final score determination time t is set to "not calculated”.
- the display control unit 76 controls not to display the uncalculated final score on the display. Therefore, as shown in FIG. 18, the display 18 does not plot the final score on either graph 131 or graph 132.
- the predetermined value is 0.5
- the number of endoscopic images and raw scores acquired during the period ⁇ t is 4, and the number of raw scores that are “uncalculated” is 2. Since the above ratio is 2/4 (0.5), the final score is set to "not calculated".
- the unsuitable image discrimination unit 74 it is not preferable to determine whether to calculate the final score or not from the number of raw scores calculated by the unsuitable image discrimination unit 74 and the number of calculated raw scores. It is preferable because the number or ratio of the raw scores is suppressed, the final score is appropriately determined, and the display of the score is stable.
- the final score may be displayed by a message notifying the severity of the disease to be observed or the judgment result of the stage.
- the severity or stage is determined by the final score.
- the display control unit 76 uses a threshold value for controlling whether or not to display the final score. That is, in the final score, the severity or the stage is determined by the threshold value T1 of the number of pixels of the bleeding part and the threshold value T2 of the number of pixels of the dense part.
- the severity when the number of bleeding part pixels is the threshold value T1 or more, it is severe, when the number of bleeding part pixels is less than the threshold value T1 and the number of dense part pixels is the threshold value T2 or more, it is moderate, or the number of bleeding part pixels is less than the threshold value.
- the case where the number of pixels in the dense area is less than the threshold value T2 is regarded as mild.
- pathological non-remission or bleeding is caused by severe illness when the number of bleeding part pixels is the threshold T1 or more and moderate illness when the number of bleeding part pixels is less than the threshold T1 and the number of dense part pixels is the threshold T2 or more.
- a mild case in which the number of pixels is less than the threshold value and the number of pixels in the dense area is less than the threshold value T2 is defined as pathological remission.
- the message notifying the determination result of the severity or the stage is performed by displaying the message 135 on a part of the display 18, for example.
- message 135 is either "severe”, “moderate”, or “mild” in the case of severity, or "remission” or “non-remission” in the case of stage. That message.
- the user can obtain information to support the diagnosis of the severity or stage at a glance without disturbing the observation. preferable.
- the endoscope 12 obtains an endoscope image which is a special image at a certain point in time by imaging an observation target illuminated by special light (step ST110).
- the final score is set to be automatically acquired at predetermined intervals.
- the image acquisition unit 71 acquires a special image from the endoscope 12 (step ST120).
- the special image is sent to the unsuitable image discriminating unit 74, and it is discriminated whether it is appropriate or unsuitable for calculating the raw score.
- the raw score is calculated based on the special image (step ST140).
- the raw score is set to "uncalculated" (step ST150).
- the final score is determined from the calculation result of the raw score (step ST160).
- the display control unit 76 controls the display of the final score (step ST170).
- the display displays the final score with a controlled display (step ST180).
- the observation is finished (YES in step ST190)
- the observation is finished. If the observation is not completed (NO in step ST190), the process returns to the endoscopic image acquisition.
- the present invention is applied to an endoscopic system that processes an endoscopic image, but it is applied to a medical image processing system that processes a medical image other than the endoscopic image.
- the medical image processing system includes the image processing apparatus of the present invention.
- the present invention can also be applied to a diagnostic support device for providing diagnostic support to a user using a medical image.
- the present invention can also be applied to a medical work support device for supporting medical work such as a diagnostic report by using a medical image.
- the diagnostic support device 201 is used in combination with a modality such as a medical image processing system 202 and a PACS (Picture Archiving and Communication Systems) 203.
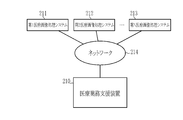
- the medical service support device 210 includes various inspection devices such as the first medical image processing system 211, the second medical image processing system 212, ..., The Nth medical image processing system 213, and an arbitrary network. Connect via 214.
- the medical service support device 210 receives medical images from the first to Nth medical image processing systems 211, 212, ..., 213, and supports the medical service based on the received medical images.
- hardware of a processing unit that executes various processes such as an image signal acquisition unit 51, a DSP 52, a noise reduction unit 53, a signal processing unit 55, and a video signal generation unit 56 included in the processor device 16.
- the hardware-like structure is various processors as shown below.
- the circuit configuration is changed after manufacturing the CPU (Central Processing Unit), FPGA (Field Programmable Gate Array), etc., which are general-purpose processors that execute software (programs) and function as various processing units. It includes a programmable logic device (PLD), which is a possible processor, a dedicated electric circuit, which is a processor having a circuit configuration specially designed for executing various processes, and the like.
- PLD programmable logic device
- One processing unit may be composed of one of these various processors, or may be composed of a combination of two or more processors of the same type or different types (for example, a plurality of FPGAs or a combination of a CPU and an FPGA). May be done. Further, a plurality of processing units may be configured by one processor. As an example of configuring a plurality of processing units with one processor, first, as represented by a computer such as a client or a server, one processor is configured by a combination of one or more CPUs and software. There is a form in which this processor functions as a plurality of processing units.
- SoC System On Chip
- a processor that realizes the functions of the entire system including a plurality of processing units with one IC (Integrated Circuit) chip is used.
- the various processing units are configured by using one or more of the above-mentioned various processors as a hardware-like structure.
- the present invention can also be implemented by the following alternative embodiments.
- a plurality of endoscopic images obtained by imaging observation objects at different times with an endoscopic device are acquired, and the observation objects are acquired. Based on each endoscopic image, a raw score associated with determining the severity or stage of the disease to be observed is calculated. Determine the final score based on the raw score, A processor device that controls the display of the final score and / or the change over time of the final score in real time.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Surgery (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Optics & Photonics (AREA)
- Veterinary Medicine (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Data Mining & Analysis (AREA)
- Signal Processing (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Business, Economics & Management (AREA)
- General Business, Economics & Management (AREA)
- Endoscopes (AREA)
- Image Processing (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021575725A JP7644031B2 (ja) | 2020-02-07 | 2021-01-22 | 画像処理装置、内視鏡システム、及び画像処理装置の作動方法 |
| CN202180013129.4A CN115052510B (zh) | 2020-02-07 | 2021-01-22 | 图像处理装置、内窥镜系统及图像处理方法 |
| EP21750428.1A EP4101365A4 (en) | 2020-02-07 | 2021-01-22 | IMAGE PROCESSING DEVICE, ENDOSCOPIC SYSTEM AND IMAGE PROCESSING METHOD |
| US17/817,846 US12254626B2 (en) | 2020-02-07 | 2022-08-05 | Image processing device, endoscope system, and image processing method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-019803 | 2020-02-07 | ||
| JP2020019803 | 2020-02-07 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/817,846 Continuation US12254626B2 (en) | 2020-02-07 | 2022-08-05 | Image processing device, endoscope system, and image processing method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021157392A1 true WO2021157392A1 (ja) | 2021-08-12 |
Family
ID=77200067
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/002286 Ceased WO2021157392A1 (ja) | 2020-02-07 | 2021-01-22 | 画像処理装置、内視鏡システム、及び画像処理方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12254626B2 (https=) |
| EP (1) | EP4101365A4 (https=) |
| JP (1) | JP7644031B2 (https=) |
| CN (1) | CN115052510B (https=) |
| WO (1) | WO2021157392A1 (https=) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023058503A1 (ja) * | 2021-10-04 | 2023-04-13 | 富士フイルム株式会社 | 内視鏡システム、医療画像処理装置及びその作動方法 |
| JPWO2024013848A1 (https=) * | 2022-07-12 | 2024-01-18 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006122502A (ja) * | 2004-10-29 | 2006-05-18 | Olympus Corp | 画像処理方法及びカプセル型内視鏡装置 |
| JP2006288612A (ja) * | 2005-04-08 | 2006-10-26 | Olympus Corp | 画像表示装置 |
| JP2009050321A (ja) * | 2007-08-23 | 2009-03-12 | Olympus Corp | 画像処理装置 |
| US9324145B1 (en) * | 2013-08-08 | 2016-04-26 | Given Imaging Ltd. | System and method for detection of transitions in an image stream of the gastrointestinal tract |
| JP2016144626A (ja) * | 2015-01-29 | 2016-08-12 | 富士フイルム株式会社 | 画像処理装置及び画像処理方法、並びに内視鏡システム |
| JP2016214637A (ja) * | 2015-05-22 | 2016-12-22 | Hoya株式会社 | 画像処理装置 |
| WO2017057574A1 (ja) * | 2015-09-29 | 2017-04-06 | 富士フイルム株式会社 | 画像処理装置、内視鏡システム、及び画像処理方法 |
| WO2017057414A1 (ja) * | 2015-09-28 | 2017-04-06 | 富士フイルム株式会社 | 画像処理装置、内視鏡システム、及び画像処理方法 |
| JP2019037688A (ja) * | 2017-08-29 | 2019-03-14 | 富士フイルム株式会社 | 医療画像処理システム、内視鏡システム、診断支援装置、並びに医療業務支援装置 |
| JP2019111040A (ja) | 2017-12-22 | 2019-07-11 | サイバネットシステム株式会社 | 画像解析装置及び画像解析方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8267689B2 (en) * | 2004-11-18 | 2012-09-18 | PreViser Corporation | Describing a periodontal disease state |
| IL182332A (en) * | 2006-03-31 | 2013-04-30 | Given Imaging Ltd | A system and method for assessing a patient's condition |
| US20100030803A1 (en) * | 2008-07-30 | 2010-02-04 | Erik Rothenberg | Method for generating business intelligence |
| US9456755B2 (en) * | 2011-04-29 | 2016-10-04 | Medtronic, Inc. | Method and device to monitor patients with kidney disease |
| JP6140056B2 (ja) | 2013-09-26 | 2017-05-31 | 富士フイルム株式会社 | 内視鏡システム、内視鏡システムのプロセッサ装置、内視鏡システムの作動方法、プロセッサ装置の作動方法 |
| US9784665B1 (en) * | 2014-12-29 | 2017-10-10 | Flagship Biosciences, Inc. | Methods for quantitative assessment of muscle fibers in muscular dystrophy |
| WO2016121811A1 (ja) * | 2015-01-29 | 2016-08-04 | 富士フイルム株式会社 | 画像処理装置及び画像処理方法、並びに内視鏡システム |
| WO2018155560A1 (ja) * | 2017-02-24 | 2018-08-30 | 富士フイルム株式会社 | 内視鏡システム、プロセッサ装置、及び、内視鏡システムの作動方法 |
| JP6785942B2 (ja) * | 2017-03-03 | 2020-11-18 | 富士フイルム株式会社 | 内視鏡システム、プロセッサ装置、及び、内視鏡システムの作動方法 |
| TW201902411A (zh) * | 2017-06-09 | 2019-01-16 | 多田智裕 | 藉由消化器官之內視鏡影像之疾病的診斷支援方法、診斷支援系統、診斷支援程式及記憶此診斷支援程式之電腦可讀取之記錄媒體 |
| EP3884838A4 (en) * | 2018-11-21 | 2022-08-17 | AI Medical Service Inc. | DISEASE DIAGNOSTIC AID METHOD BASED ON DIGESTIVE ORGAN ENDOSCOPIC IMAGES, DIAGNOSTIC AID SYSTEM, DIAGNOSTIC AID PROGRAM AND COMPUTER READABLE RECORDING MEDIA HAVING A DIAGNOSTIC AID PROGRAM STORED ON IT -THIS |
-
2021
- 2021-01-22 EP EP21750428.1A patent/EP4101365A4/en active Pending
- 2021-01-22 WO PCT/JP2021/002286 patent/WO2021157392A1/ja not_active Ceased
- 2021-01-22 JP JP2021575725A patent/JP7644031B2/ja active Active
- 2021-01-22 CN CN202180013129.4A patent/CN115052510B/zh active Active
-
2022
- 2022-08-05 US US17/817,846 patent/US12254626B2/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006122502A (ja) * | 2004-10-29 | 2006-05-18 | Olympus Corp | 画像処理方法及びカプセル型内視鏡装置 |
| JP2006288612A (ja) * | 2005-04-08 | 2006-10-26 | Olympus Corp | 画像表示装置 |
| JP2009050321A (ja) * | 2007-08-23 | 2009-03-12 | Olympus Corp | 画像処理装置 |
| US9324145B1 (en) * | 2013-08-08 | 2016-04-26 | Given Imaging Ltd. | System and method for detection of transitions in an image stream of the gastrointestinal tract |
| JP2016144626A (ja) * | 2015-01-29 | 2016-08-12 | 富士フイルム株式会社 | 画像処理装置及び画像処理方法、並びに内視鏡システム |
| JP2016214637A (ja) * | 2015-05-22 | 2016-12-22 | Hoya株式会社 | 画像処理装置 |
| WO2017057414A1 (ja) * | 2015-09-28 | 2017-04-06 | 富士フイルム株式会社 | 画像処理装置、内視鏡システム、及び画像処理方法 |
| WO2017057574A1 (ja) * | 2015-09-29 | 2017-04-06 | 富士フイルム株式会社 | 画像処理装置、内視鏡システム、及び画像処理方法 |
| JP2019037688A (ja) * | 2017-08-29 | 2019-03-14 | 富士フイルム株式会社 | 医療画像処理システム、内視鏡システム、診断支援装置、並びに医療業務支援装置 |
| JP2019111040A (ja) | 2017-12-22 | 2019-07-11 | サイバネットシステム株式会社 | 画像解析装置及び画像解析方法 |
Non-Patent Citations (2)
| Title |
|---|
| ISHIKAWA HIDEKI : "Problems related to diagnosing the cure of ulcerative colitis", GASTRONENTEROLOGICAL ENDOSCOPY, vol. 32, no. 1, 20 January 1990 (1990-01-20), pages 262 - 263, XP009524554, ISSN: 0387-1207, DOI: 10.11280/geel973b.32.256 * |
| See also references of EP4101365A4 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023058503A1 (ja) * | 2021-10-04 | 2023-04-13 | 富士フイルム株式会社 | 内視鏡システム、医療画像処理装置及びその作動方法 |
| JPWO2024013848A1 (https=) * | 2022-07-12 | 2024-01-18 | ||
| WO2024013848A1 (ja) * | 2022-07-12 | 2024-01-18 | 日本電気株式会社 | 画像処理装置、画像処理方法及び記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12254626B2 (en) | 2025-03-18 |
| EP4101365A4 (en) | 2023-08-02 |
| CN115052510B (zh) | 2025-09-05 |
| US20220383492A1 (en) | 2022-12-01 |
| CN115052510A (zh) | 2022-09-13 |
| EP4101365A1 (en) | 2022-12-14 |
| JP7644031B2 (ja) | 2025-03-11 |
| JPWO2021157392A1 (https=) | 2021-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6858672B2 (ja) | 医療画像処理システム及び内視鏡システム | |
| EP3711652B1 (en) | Endoscope system | |
| EP3756532B1 (en) | Endoscope system | |
| JP7335399B2 (ja) | 医用画像処理装置及び内視鏡システム並びに医用画像処理装置の作動方法 | |
| US11089943B2 (en) | Endoscope system and method of operating the same | |
| WO2021199910A1 (ja) | 医用画像処理システム、医用画像処理システムの作動方法 | |
| US12254626B2 (en) | Image processing device, endoscope system, and image processing method | |
| JP7214886B2 (ja) | 画像処理装置及びその作動方法 | |
| JP7637683B2 (ja) | プロセッサ装置、プロセッサ装置の作動方法 | |
| JP7386347B2 (ja) | 内視鏡システム及びその作動方法 | |
| US12262875B2 (en) | Endoscope system | |
| JP2025074589A (ja) | 内視鏡システム及びその作動方法 | |
| JP7447243B2 (ja) | プロセッサ装置及びその作動方法 | |
| EP4088644A1 (en) | Endoscope system and operation method thereof | |
| WO2021182048A1 (ja) | 内視鏡システム、及び内視鏡システムの作動方法 | |
| WO2021149357A1 (ja) | 内視鏡システム及びその作動方法 | |
| JP7815232B2 (ja) | 医療画像処理装置及び内視鏡システム | |
| JP7411515B2 (ja) | 内視鏡システム及びその作動方法 | |
| EP4082419A1 (en) | Endoscope system and method for operating same | |
| WO2021172131A1 (ja) | 内視鏡システム、及び内視鏡システムの作動方法 | |
| CN114627045A (zh) | 医用图像处理系统、医用图像处理系统的工作方法 | |
| CN117119942A (zh) | 处理器装置、医疗图像处理装置、医疗图像处理系统及内窥镜系统 | |
| CN114585292A (zh) | 内窥镜系统及其工作方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21750428 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021575725 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021750428 Country of ref document: EP Effective date: 20220907 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 202180013129.4 Country of ref document: CN |