WO2020246531A1 - 情報処理装置、プログラム、及び算出方法 - Google Patents
情報処理装置、プログラム、及び算出方法 Download PDFInfo
- Publication number
- WO2020246531A1 WO2020246531A1 PCT/JP2020/022049 JP2020022049W WO2020246531A1 WO 2020246531 A1 WO2020246531 A1 WO 2020246531A1 JP 2020022049 W JP2020022049 W JP 2020022049W WO 2020246531 A1 WO2020246531 A1 WO 2020246531A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- series data
- time series
- output
- controller
- control
- Prior art date
Links
Images

Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
Abstract
制御器Cと、制御器Cの出力を入力とする制御対象Pとを備える閉ループ系の制御システムSにおいて、制御器Cのパラメータを算出する情報処理装置1において、時系列データ取得部30は、制御器Cの出力の時系列データである第1時系列データと、制御対象Pの出力の時系列データである第2時系列データとを取得する。入力信号推定部31は、制御器Cのパラメータ、第1時系列データ、及び第2時系列データから、制御器Cに入力する入力信号の時系列データの推定値である第3時系列データを推定する。相補感度関数算出部32は、第2時系列データと第3時系列データとに基づいて、制御器Cに対する相補感度関数を算出する。プラント出力算出部33は、制御システムSの入力信号を相補感度関数に印加したときの出力である第4時系列データを算出する。
Description
本開示は情報処理装置、プログラム、及び算出方法に関し、特に、閉ループ系の制御器の制御パラメータを設定する技術に関する。
閉ループ系における制御対象のモデルを用いない制御手法が種々提案されている。このようなモデルを用いない制御器パラメータの自動調整手法の一つとしてFRIT(Fictitious Reference Iterative Tuning)が知られている(特許文献1参照)。
FRIT等のデータ駆動制御により得られた制御パラメータを用いて閉ループ系を制御すると、系が不安定となる場合がある。特に、FRITで用いられる参照モデルの応答を実現する制御パラメータが存在しない場合に系が不安定となりやすいことが知られている。
本開示はこれらの点に鑑みてなされたものであり、FRITにおいて制御器パラメータを用いた制御の安定性を評価する技術を提供することを目的とする。
本開示のある態様は、制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出する情報処理装置である。この装置は、前記制御器の出力の時系列データである第1時系列データと、前記制御対象の出力の時系列データである第2時系列データとを取得する時系列データ取得部と、前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定する入力信号推定部と、前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出する相補感度関数算出部と、前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出するプラント出力算出部と、を備える。
前記制御システムは、前記制御対象の入力に対する所定の応答を実現するモデルである参照モデルをさらに備えていてもよく、前記情報処理装置は、前記参照モデルに前記入力信号を入力した場合の出力の時系列データである第5時系列データを取得するモデル出力取得部と、前記第4時系列データと前記第5時系列データとの誤差に関する評価関数の評価値に基づいて前記制御器のパラメータを更新するパラメータ更新部と、をさらに備えてもよい。
前記評価関数は、前記第4時系列データと前記第5時系列データとの誤差の二乗和であってもよく、前記パラメータ更新部は、前記評価関数の評価値が小さくなるように、反復処理によって前記制御器のパラメータを更新してもよい。
本開示の別の態様は、プログラムである。このプログラムは、制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出するコンピュータに、前記制御器の出力の時系列データである第1時系列データを取得する機能と、前記制御対象の出力の時系列データである第2時系列データを取得する機能と、前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定する機能と、前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出する機能と、前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出する機能と、を実現させる。
本開示の別の態様は、算出方法である。この算出方法は、制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出する算出方法であって、前記制御器の出力の時系列データである第1時系列データを取得すること、前記制御対象の出力の時系列データである第2時系列データを取得すること、前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定すること、前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出すること、及び前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出すること、を含む。
本開示の別の態様は、記憶媒体である。この記憶媒体は、制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出するコンピュータによって読取可能なコンピュータプログラムを記憶する記憶媒体であって、前記コンピュータプログラムは、前記コンピュータにより実行されると、前記コンピュータに以下を実行させる:前記制御器の出力の時系列データである第1時系列データを取得すること、前記制御対象の出力の時系列データである第2時系列データを取得すること、前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定すること、前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出すること、及び前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出すること。
本開示の別の態様は、算出方法である。この算出方法は、制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出する算出方法であって、前記制御器の出力の時系列データである第1時系列データを取得すること、前記制御対象の出力の時系列データである第2時系列データを取得すること、前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定すること、前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出すること、及び前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出すること、を含む。
本開示の別の態様は、記憶媒体である。この記憶媒体は、制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出するコンピュータによって読取可能なコンピュータプログラムを記憶する記憶媒体であって、前記コンピュータプログラムは、前記コンピュータにより実行されると、前記コンピュータに以下を実行させる:前記制御器の出力の時系列データである第1時系列データを取得すること、前記制御対象の出力の時系列データである第2時系列データを取得すること、前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定すること、前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出すること、及び前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出すること。
なお、以上の構成要素の任意の組み合わせ、本開示の表現を方法、装置、システム、コンピュータプログラム、データ構造、記録媒体などの間で変換したものもまた、本開示の態様として有効である。
本開示によれば、FRITにおいて制御器パラメータを用いた制御の安定性を評価することができる。
[1.概略]
FRITや非反証制御等のデータ駆動制御により得られた制御パラメータを用いて制御を行うと、閉ループ系が不安定化する場合がある。特に、制御器の構造上、参照モデルの応答を実現する制御パラメータが存在しない場合に不安定化が生じやすいことが知られている。この問題はSafonovが提案した疑似参照入力を使用する場合に生じる。
FRITや非反証制御等のデータ駆動制御により得られた制御パラメータを用いて制御を行うと、閉ループ系が不安定化する場合がある。特に、制御器の構造上、参照モデルの応答を実現する制御パラメータが存在しない場合に不安定化が生じやすいことが知られている。この問題はSafonovが提案した疑似参照入力を使用する場合に生じる。
Engellらは、上記の問題が発生する原因として、プラント出力から疑似誤差(疑似参照信号とプラント出力の誤差)の伝達関数を求める際に不安定極が相殺されてしまうため、閉ループ系の不安定化を検知できないことを示している。そこで、Engellらは、疑似参照入力と疑似誤差に関する感度関数を入出力データから求めた後、得られた感度関数に目標値を印加し感度関数の出力である誤差を求めることを提案した。これにより、不安定極を相殺することなく感度関数の出力である誤差を求めることができ、閉ループ系の不安定化を検知することができる。Engellらの手法において、感度関数はFIR(Finite Impulse Response)モデルに基づいて同定される。このため、感度関数の同定にプラントモデルの構造は不要である。さらに、時間領域で計算していることからオンライン計算への展開が可能となる。
Engellらは感度関数の出力である誤差を最小にする評価関数を設定した。これに対し、実施の形態に係る手法は、閉ループ系と設計者が設定した参照モデルとが一致するような評価関数を設定する。具体的には、本実施の形態では、まず、疑似参照入力を利用し、調整する制御器に対する相補感度関数を求める。すなわち相補感度関数の出力は制御パラメータの関数となる。次に、設計者が与えたい目標値を相補感度関数に印加しその出力を求める。相補感度関数の出力はプラントからの出力である。すなわち、相補感度関数の出力を見ることにより、FRITにおいて制御器パラメータを用いた制御の安定性を評価することができる。
実施の形態に係る手法では、相補感度関数から得られた出力と設計者が設定した参照モデルの出力の二乗誤差が最小になる制御器パラメータを粒子群最適化等の最適化手法により求める。これにより、標準的なFRITでは閉ループ系が不安定になる場合であっても、本実施の形態では安定な制御パラメータが得られる。これより、実施の形態は標準FRITの利点を活かしたまま不安定化を軽減することができる。
[2.安定性を考慮したFRITの導出][2.1.標準FRIT]
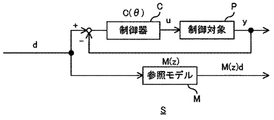
図1は、標準的なFRITを説明するための図である。図1に示す閉ループ系の制御システムSにおいて、制御器Cは制御に用いるパラメータθを引数とする関数C(θ)で表現されている。図1に示す制御システムSは、制御対象Pの出力yと後述する参照モデルMの出力とを一致させることが目的である。具体的には、この目的を達成するために制御対象Pに入力すべき制御量uを出力するようなパラメータθを特定することが目的である。なお、図1において、θは自由に調整できるパラメータであり、u及びyは観測により取得可能なデータである。また、dは制御システムSの目標値である。
図1は、標準的なFRITを説明するための図である。図1に示す閉ループ系の制御システムSにおいて、制御器Cは制御に用いるパラメータθを引数とする関数C(θ)で表現されている。図1に示す制御システムSは、制御対象Pの出力yと後述する参照モデルMの出力とを一致させることが目的である。具体的には、この目的を達成するために制御対象Pに入力すべき制御量uを出力するようなパラメータθを特定することが目的である。なお、図1において、θは自由に調整できるパラメータであり、u及びyは観測により取得可能なデータである。また、dは制御システムSの目標値である。
FRITは1組の入出力データと参照モデルMとから、制御システムSの制御器Cのパラメータθを自動調整する手法である。初期のパラメータθを用いて1組の閉ループ実験を行い、そのときの入出力データu及びyをサンプリングして計測する。このとき、制御システムSは安定であるとする。図1より、C(θ)(r-y)=uであるから、制御システムSの目標値dの推定値である疑似参照信号rはu及びyを用いて以下の式(1)で表せる。
r(θ,k)=C-1(θ)u(k)+y(k) (1)
r(θ,k)=C-1(θ)u(k)+y(k) (1)
図1に示す一般的なフィードバック制御の応答と、参照モデルM(z)及び擬似参照信号r(θ,k)から得られる目標応答との誤差に関する評価関数Jθは次式(2)で表される。
この評価関数Jθを最小にする制御器Cのパラメータθは、制御対象Pの出力であるプラント出力y(k)と参照モデルMの出力M(z)r(θ,k)との二乗誤差を最小化するという意味において、制御器Cの最適なパラメータθである。一般的なFRITでは、オフライン計算で最適なパラメータθが計算される。なお、評価関数は式(2)に示す形に限られず、制御入力等の制約を考慮したものであってもよい。
式(1)から明らかなように、FRITは閉ループ系の制御システムSの伝達関数と参照モデルがマッチングする最適な制御器パラメータを求めることを目的としている。すなわち、FRITは、以下の式(2)で表される評価関数を最小にする最適パラメータを求める。FRITは擬似参照信号r(θ,k)を利用して、閉ループ試験を繰り返すことなく実験により取得した1組の入出力データを用いてオフラインで最適制御パラメータを求めるデータ駆動制御の1つであるともいえる。
FRITの評価関数Jθ、疑似参照信号r(θ,k)、及び疑似誤差e(θ,k)は次式で表される。

[2.2.安定性を考慮したFRIT]
疑似参照信号r(θ,k)を用いる場合にはFRITの閉ループ系の不安定化を検知できない。そこで、まず、疑似参照信号r(θ,k)とプラント出力y0を用いて時間領域における相補感度関数を求める。求めた相補感度関数に目標値dを印加し、その応答y*を求める。この応答y*が参照モデルMの応答M(z)r(θ,k)と一致するような制御器パラメータを求める。なお、相補感度関数の同定はFIRモデルを用いる。これにより、制御対象Pの構造を知る必要はなく、取得したデータのみを用いて相補感度関数を同定することができる。
疑似参照信号r(θ,k)を用いる場合にはFRITの閉ループ系の不安定化を検知できない。そこで、まず、疑似参照信号r(θ,k)とプラント出力y0を用いて時間領域における相補感度関数を求める。求めた相補感度関数に目標値dを印加し、その応答y*を求める。この応答y*が参照モデルMの応答M(z)r(θ,k)と一致するような制御器パラメータを求める。なお、相補感度関数の同定はFIRモデルを用いる。これにより、制御対象Pの構造を知る必要はなく、取得したデータのみを用いて相補感度関数を同定することができる。
まず、ラプラス領域における感度関数と相補感度関数とについて説明する。
パラメータθの調整対象とする制御器Cの感度関数Sは次式(6)で表される。
パラメータθの調整対象とする制御器Cの感度関数Sは次式(6)で表される。
調整対象とする制御器Cの相補感度関数Tは次式(7)で表される。
なお、感度関数Sと相補感度関数Tとの関係は次式(8)となる。
S(s)+T(s)=1 (8)
S(s)+T(s)=1 (8)
続いて、時間領域における疑似参照信号r(θ,k)とプラント出力y0との関係について説明する。時間領域における疑似参照信号r(θ,k)とプラント出力y0との関係は次式(9)となる。
式(9)は行列を用いて表すと以下の式(10)となる。

式(10)の左辺をベクトルy0、右辺第1項を行列Rθ、右辺第2項をベクトルtとすると、相補感度関数Tのインパルス応答t(k)は、以下の式(11)で表される。
制御システムSの入力信号d(目標値)を相補感度関数Tに印加した場合の出力y*を時間領域で表すと、次式(12)となる。
式(12)は行列を用いて表すと以下の式(13)となる。

式(13)の左辺をベクトルy*、右辺第1項を行列D、右辺第2項をベクトルtとし、式(11)を用いてtを消去すると、式(13)は式(14)に変形できる。
式(14)の右辺は全て観測により取得可能であるから、制御器Cを用いたときの目標値dを閉ループ系の制御システムSに印加したときの出力ベクトルy*を演算により取得することができる。この出力ベクトルy*と参照モデルMの出力yd(k)=M(z)d(k)との誤差e*の二乗和を、次式(15)で表される評価関数J*(θ)とする。
e*(θ,k)=y*(θ,k)-yd(k) (16)である。
標準的なFRITでは、取得したプラント出力y0に一致するようにパラメータθの関数である疑似参照信号r(θ,k)を調整する。これに対し、実施の形態に係る手法では、参照モデルMの出力M(z)d(k)にプラント出力y0が一致するように、パラメータθを調整してプラント出力y*を変更する。すなわち、標準的なFRITは実験によりあらかじめ取得したプラント出力に合うようにパラメータθを求めているのに対し、実施の形態に係る手法は参照モデルの出力M(z)d(k)に合うように、パラメータθを求める。
[2.3.安定性を考慮したFRITの構成]
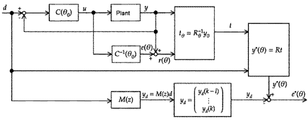
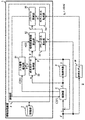
図2は、安定性を考慮したFRITの構成を模式的に示す図である。まず、パラメータθが初期値θ0のときの制御システムSの入出力データから疑似参照信号r(θ)が算出される。算出された疑似参照入力とプラント出力yとを用いて相補感度関数tを上記式(11)を用いて求められ、制御システムSの入力信号である目標値dを相補感度関数tに入力される。相補感度関数tの出力である出力y*と、参照モデルの出力M(z)dとの誤差を最小にする制御器Cのパラメータθが、最適化手法により求められる。
図2は、安定性を考慮したFRITの構成を模式的に示す図である。まず、パラメータθが初期値θ0のときの制御システムSの入出力データから疑似参照信号r(θ)が算出される。算出された疑似参照入力とプラント出力yとを用いて相補感度関数tを上記式(11)を用いて求められ、制御システムSの入力信号である目標値dを相補感度関数tに入力される。相補感度関数tの出力である出力y*と、参照モデルの出力M(z)dとの誤差を最小にする制御器Cのパラメータθが、最適化手法により求められる。
[3.シミュレーションによる検証][3.1.システムの定式化]
本願の発明者は、安定性を考慮したFRITについてシミュレーションを用いて検証した。そこで、まず、シミュレーションで用いる制御対象P、参照モデルM、制御器Cの定式化を行う。
本願の発明者は、安定性を考慮したFRITについてシミュレーションを用いて検証した。そこで、まず、シミュレーションで用いる制御対象P、参照モデルM、制御器Cの定式化を行う。
制御対象Pは次式(17)に示すように、ばね質量系とする。ここで、m、c、k、及びLは、それぞれ質量、粘性係数、ばね剛性、及びむだ時間を表す。
参照モデルMは、次式(18)に示すように1次遅れ系とする。ここで、τMはシステムの応答に関するパラメータであり、設計者が設定する。
制御器Cは次式(19)に示すPID(Proportional-Integral-Differential)制御器を用いる。ここで、Kp、Ki、及びKdはそれぞれ、Pゲイン、Iゲイン、及びDゲインである。

[3.2.シミュレーション]
シミュレーションにおいてサンプリング周期は4ミリ秒とし、制御器Cの離散化はゼロ次ホールドを用いた。なお、最適化計算には粒子群最適化を用いた。
シミュレーションにおいてサンプリング周期は4ミリ秒とし、制御器Cの離散化はゼロ次ホールドを用いた。なお、最適化計算には粒子群最適化を用いた。
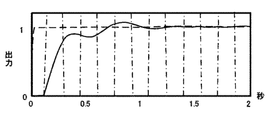
図3Aと図3Bは、従来のFRITと実施の形態に係る手法とのそれぞれにより調整したパラメータθによる制御システムSの入出力データの時間履歴を示す図である。具体的には、図3Aにおいて、破線は参照応答、実線は実施の形態に係る手法における制御システムSの出力、一点鎖線は従来のFRITにおける制御システムSの出力を示している。図3Aより、標準FRITでは制御システムSの出力が発散してグラフの枠内に収まっていないのに対し、実施の形態に係る手法は、制御の構造上モデルマッチングが実現できない場合においても閉ループ系である制御システムSが安定となる制御器Cのパラメータθが得られていることがわかる。
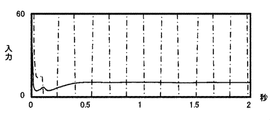
図3Bは、図3Aに対応する入力信号を示す図である。図3Aと同様に、実線は実施の形態に係る手法における入力、一点鎖線は従来のFRITにおける入力を示している。図3Bより、標準FRITでは入力も不安定となっている。一方、実施の形態に係る手法では、入力も安定している。
[4.小括]
従来のFRITでは、制御器Cのパラメータθの最適解を用いて制御しても、閉ループ系の挙動が不安定になるという問題があった。実施の形態に係る手法では、時間領域で擬似参照信号r(θ,k)とプラント出力yとの伝達関数である相補感度関数Tを同定することで、誤差を正しく検知することを可能にした。実施の形態に係る手法により、閉ループ系が安定である制御器Cのパラメータθを求められる。
従来のFRITでは、制御器Cのパラメータθの最適解を用いて制御しても、閉ループ系の挙動が不安定になるという問題があった。実施の形態に係る手法では、時間領域で擬似参照信号r(θ,k)とプラント出力yとの伝達関数である相補感度関数Tを同定することで、誤差を正しく検知することを可能にした。実施の形態に係る手法により、閉ループ系が安定である制御器Cのパラメータθを求められる。
[5.参考文献]
(FRIT)・相馬 将太郎, 金子 修, 藤井 隆雄, 一回の実験データに基づく制御器パラメータチューニングの新しいアプローチ Fictitious Reference Iterative Tuning の提案, システム制御情報学会論文誌, Vol. 17, No.12 (2004), pp. 528-536・奥谷 明大, 金子 修, 山本 茂, FRITを用いた多入出力むだ時間系に対するスミス補償器のチューニング, システム制御情報学会論文誌, Vol. 28, No 2 (2015), pp. 58-65
・データを直接用いた制御器のパラメータチューニング, 金子修, 計測と制御, Vol.43, No.11 (2008), pp903-908
(FRIT)・相馬 将太郎, 金子 修, 藤井 隆雄, 一回の実験データに基づく制御器パラメータチューニングの新しいアプローチ Fictitious Reference Iterative Tuning の提案, システム制御情報学会論文誌, Vol. 17, No.12 (2004), pp. 528-536・奥谷 明大, 金子 修, 山本 茂, FRITを用いた多入出力むだ時間系に対するスミス補償器のチューニング, システム制御情報学会論文誌, Vol. 28, No 2 (2015), pp. 58-65
・データを直接用いた制御器のパラメータチューニング, 金子修, 計測と制御, Vol.43, No.11 (2008), pp903-908
(非反証制御)・M. G. Safonov and T. C. Tsao, The unfalsified control, concept and learning, IEEE Trans. on Automat.Contr., Vol. 42, No. 6, pp. 843-847 (1997)
(安定性の考慮)・弓場井 一裕, 藤井 宏樹, 平井 淳之, パラメータ更新時の閉ループシステムの安定性を考慮したFCbTの提案, 電気学会論文誌D(産業応用部門誌), Vol.132, No.6 (2011),pp. 607-615・Kazuhiro Yubai, Hiroki Fujii, Junji Hirai, Fictitious Correlation-based Tuning Integrating the Data-Based Stability Test at Each Parameter Update, Electrical Power Systems and Computers, LNEE 99, pp. 511-518.
(疑似参照信号の問題と安定性)・S. Engell, T. Tometzki and T. Wonghong, A New Approach to Adaptive Unfalsified Control. In Proc. European Control Conf., Kos, 2007, 1328-1333.・T. Wonghong and S. Engell, Application of a New Scheme for Adaptive Unfalsified Control to a CSTR. Proc. IFAC World Congress, Korea, 13247-13252, 2008.
[6.実施の形態]
以上を踏まえ、本開示の実施の形態について説明する。
以上を踏まえ、本開示の実施の形態について説明する。
図4は、実施の形態に係る情報処理装置1の機能構成を模式的に示す図である。情報処理装置1は、記憶部2と制御部3とを備える。図4において、矢印は主なデータの流れを示しており、図4に示していないデータの流れがあってもよい。図4において、各機能ブロックはハードウェア(装置)単位の構成ではなく、機能単位の構成を示している。そのため、図4に示す機能ブロックは単一の装置内に実装されてもよく、あるいは複数の装置内に分かれて実装されてもよい。機能ブロック間のデータの授受は、データバス、ネットワーク、可搬記憶媒体等、任意の手段を介して行われてもよい。
記憶部2は、情報処理装置1を実現するコンピュータのBIOS(Basic Input Output System)等を格納するROM(Read Only Memory)や情報処理装置1の作業領域となるRAM(Random Access Memory)、OS(Operating System)やアプリケーションプログラム、当該アプリケーションプログラムの実行時に参照される種々の情報を格納するHDD(Hard Disk Drive)やSSD(Solid State Drive)等の大容量記憶装置である。
制御部3は、情報処理装置1のCPU(Central Processing Unit)やGPU(Graphics Processing Unit)等のプロセッサであり、記憶部2に記憶されたプログラムを実行することによって時系列データ取得部30、入力信号推定部31、相補感度関数算出部32、プラント出力算出部33、モデル出力取得部34、及びパラメータ更新部35として機能する。
なお、図4は、情報処理装置1が単一の装置で構成されている場合の例を示している。しかしながら、情報処理装置1は、例えばクラウドコンピューティングシステムのように複数のプロセッサやメモリ等の計算リソースによって実現されてもよい。この場合、制御部3を構成する各部は、複数の異なるプロセッサの中の少なくともいずれかのプロセッサがプログラムを実行することによって実現される。
情報処理装置1は、制御器Cと制御器Cの出力を入力とする制御対象Pとを備える制御システムSにおいて、制御器Cのパラメータθを算出するための装置である。図4に示すように、制御システムSは、制御対象Pの出力が制御器Cの入力にフィードバックされる閉ループ系である。
時系列データ取得部30は、制御器Cの出力の時系列データである第1時系列データと、制御対象Pの出力の時系列データである第2時系列データとを取得する。ここで、第1時系列データは上述した制御対象Pに入力すべき制御量uに対応し、第2時系列データは上述した制御対象Pの出力yに対応する。したがって、以下本明細書において、「第1時系列データu」、「第2時系列データy」と記載することがある。
入力信号推定部31は、制御器Cのパラメータθ、第1時系列データu、及び第2時系列データyから、制御器Cに入力する入力信号の時系列データの推定値である第3時系列データを推定する。第3時系列データは、上述した擬似参照信号r(θ,k)に対応する。したがって、以下、「第3時系列データr(θ)」と記載することがある。
相補感度関数算出部32は、第2時系列データuと第3時系列データr(θ)とに基づいて、上述した式(11)を用いて制御器Cに対する相補感度関数tを算出する。プラント出力算出部33は、上述した式(12)又は式(13)を用いて、制御システムSの入力信号dを相補感度関数tに印加したときの出力である第4時系列データを算出する。第4時系列データは、制御システムSの入力信号d(目標値)を相補感度関数Tに印加した場合の出力y*に対応する。したがって、以下、「第4時系列データy*」と記載することがある。
制御対象Pに入力すべき制御量である第1時系列データu、制御対象Pの出力である第2時系列データy、及び制御システムSの入力信号である第4時系列データdは、いずれも観測により取得可能な量である。情報処理装置1は、観測により取得した第1時系列データu、第2時系列データy、及び入力信号dを用いることで、制御システムSに入力信号dを入力したときの出力y*を算出することができる。出力y*は、プラント(制御対象P)からの出力である。情報処理装置1は、この出力y*の振る舞い(例えば、発散するか否か、振動するか否か、収束するか否か等)を解析することで、FRITにおいて制御器Cのパラメータθを用いたプラントの制御の安定性を評価することができる。
図2及び図4に示すように、制御システムSは制御対象Pの入力信号dに対する出力を所定の出力とすることを実現する参照モデルMを備えている。なお、参照モデルMは、制御対象Pの出力が設計者が希望する出力となるように、設計者が決定する。モデル出力取得部34は、参照モデルMに入力信号dを入力した場合の出力の時系列データである第5時系列データを取得する。第5時系列データは、上述した参照モデルの出力M(z)dに対応する。以下、第5時系列データを「第5時系列データyd」と記載することがある。
ここで、情報処理装置1がFRITにおける制御器Cのパラメータθを用いた制御の安定性を評価することができるのであれば、情報処理装置1は、制御が安定化するようにパラメータθを最適化することもできる。これを実現するために、パラメータ更新部35は、第4時系列データy*と第5時系列データydとの誤差に関する評価関数J*(θ)の評価値に基づいて、制御器Cのパラメータθを更新する。
より具体的には、上述した式(15)及び式(16)に示すように、パラメータ更新部35が用いる評価関数J*(θ)は、第4時系列データy*と第5時系列データydとの誤差の二乗和である。パラメータ更新部35は、評価関数J*(θ)の評価値が小さくなるように、反復処理によって制御器Cのパラメータθを更新する。すなわち、パラメータ更新部35は、第4時系列データy*と第5時系列データydとの誤差の二乗和が小さくなるという意味において最適なパラメータθを反復によって求める。
一般に、第4時系列データy*が発散したり振動したりすると、第4時系列データy*と第5時系列データydとの誤差の二乗和は大きくなる。パラメータ更新部35が第4時系列データy*と第5時系列データydとの誤差の二乗和が小さくなるように制御器Cのパラメータθを更新することにより、情報処理装置1は、FRITにおいて制御器Cのパラメータθを用いたプラントの制御を安定化させることができる。
なお、パラメータ更新部35は、評価関数の評価値が小さくなるように制御器Cのパラメータθを更新できるのであればどのような最適化手法を用いてもよい。一例としてパラメータ更新部35は、あらかじめ定められた所定の回数を反復回数の上限として、粒子群最適化の手法を用いて制御器Cのパラメータθを更新してもよい。
<情報処理装置1が実行する情報処理方法の処理フロー>
図5は、実施の形態に係る情報処理装置1が実行する情報処理の流れを説明するためのフローチャートである。本フローチャートにおける処理は、例えば情報処理装置1が起動したときに開始する。
図5は、実施の形態に係る情報処理装置1が実行する情報処理の流れを説明するためのフローチャートである。本フローチャートにおける処理は、例えば情報処理装置1が起動したときに開始する。
時系列データ取得部30は、制御器Cの出力の時系列データである第1時系列データuを取得する(S2)。また、時系列データ取得部30は、制御対象Pの出力の時系列データである第2時系列データyを取得する(S4)。
入力信号推定部31は、制御器Cのパラメータθ、第1時系列データu、及び第2時系列データyから、式(1)を用いて、制御器Cに入力する入力信号dの時系列データの推定値である第3時系列データr(θ)を推定する(S6)。
相補感度関数算出部32は、第2時系列データyと第3時系列データr(θ)とに基づいて、式(11)を用いて制御器Cに対する相補感度関数t(すなわち、擬似参照信号r(θ,k)に対する相補感度関数t)を算出する(S8)。プラント出力算出部33は、式(14)を用いて、制御システムSの入力信号dを相補感度関数tに印加したときの出力である第4時系列データy*(すなわち、入力信号dに対する制御対象Pの出力)を算出する(S10)。
モデル出力取得部34は、参照モデルMに入力信号dを入力した場合の出力の時系列データである第5時系列データydを取得する(S12)。パラメータ更新部35は、式(15)及び式(16)を用いて、第4時系列データy*と第5時系列データydとの誤差に関する評価関数J(θ)の評価値を算出する(S14)。パラメータ更新部35は、評価関数J(θ)の評価値が小さくなるように、反復処理によって制御器Cのパラメータθを更新する(S16)。
パラメータ更新部35が制御器Cのパラメータθを更新すると、本フローチャートにおける処理は終了する。情報処理装置1は、上記の処理をオンラインで繰り返すことにより、制御器Cのパラメータθの更新を継続する。
<実施の形態に係る情報処理装置1が奏する効果>
以上説明したように、実施の形態に係る情報処理装置1によれば、FRITにおいて制御器Cのパラメータθを用いたプラントの制御の安定性を評価することができる。また、情報処理装置1は、閉ループ系の制御が安定化するようにFRITにおける制御器Cパラメータθを最適化することもできる。
以上説明したように、実施の形態に係る情報処理装置1によれば、FRITにおいて制御器Cのパラメータθを用いたプラントの制御の安定性を評価することができる。また、情報処理装置1は、閉ループ系の制御が安定化するようにFRITにおける制御器Cパラメータθを最適化することもできる。
以上、本開示を実施の形態を用いて説明したが、本開示の技術的範囲は上記実施の形態に記載の範囲には限定されず、その要旨の範囲内で種々の変形及び変更が可能である。例えば、装置の全部又は一部は、任意の単位で機能的又は物理的に分散・統合して構成することができる。また、複数の実施の形態の任意の組み合わせによって生じる新たな実施の形態も、本開示の実施の形態に含まれる。組み合わせによって生じる新たな実施の形態の効果は、もとの実施の形態の効果を併せ持つ。
本出願は、2019年6月7日付で出願された日本国特許出願(特願2019-106908)に基づくものであり、その内容はここに参照として取り込まれる。
本開示の情報処理装置、及びプログラム、及び算出方法は、FRITにおいて制御器パラメータを用いた制御の安定性を評価する技術を提供することができる、という点において有用である。
1・・・情報処理装置
2・・・記憶部
3・・・制御部
30・・・時系列データ取得部
31・・・入力信号推定部
32・・・相補感度関数算出部
33・・・プラント出力算出部
34・・・モデル出力取得部
35・・・パラメータ更新部
C・・・制御器
M・・・参照モデル
P・・・制御対象
S・・・制御システム
2・・・記憶部
3・・・制御部
30・・・時系列データ取得部
31・・・入力信号推定部
32・・・相補感度関数算出部
33・・・プラント出力算出部
34・・・モデル出力取得部
35・・・パラメータ更新部
C・・・制御器
M・・・参照モデル
P・・・制御対象
S・・・制御システム
Claims (5)
- 制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出する情報処理装置であって、
前記制御器の出力の時系列データである第1時系列データと、前記制御対象の出力の時系列データである第2時系列データとを取得する時系列データ取得部と、
前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定する入力信号推定部と、
前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出する相補感度関数算出部と、
前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出するプラント出力算出部と、
を備える情報処理装置。 - 前記制御システムは、前記制御対象の入力に対する所定の応答を実現するモデルである参照モデルをさらに備えており、
前記情報処理装置は、
前記参照モデルに前記入力信号を入力した場合の出力の時系列データである第5時系列データを取得するモデル出力取得部と、
前記第4時系列データと前記第5時系列データとの誤差に関する評価関数の評価値に基づいて前記制御器のパラメータを更新するパラメータ更新部と、
をさらに備える請求項1に記載の情報処理装置。 - 前記評価関数は、前記第4時系列データと前記第5時系列データとの誤差の二乗和であり、
前記パラメータ更新部は、前記評価関数の評価値が小さくなるように、反復処理によって前記制御器のパラメータを更新する、
請求項2に記載の情報処理装置。 - 制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出するコンピュータに、
前記制御器の出力の時系列データである第1時系列データを取得する機能と、
前記制御対象の出力の時系列データである第2時系列データを取得する機能と、
前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定する機能と、
前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出する機能と、
前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出する機能と、
を実現させるプログラム。 - 制御器と、前記制御器の出力を入力とする制御対象と、を備え、前記制御対象の出力が前記制御器の入力にフィードバックされる制御システムにおいて、前記制御器のパラメータを算出する算出方法であって、
前記制御器の出力の時系列データである第1時系列データを取得すること、
前記制御対象の出力の時系列データである第2時系列データを取得すること、
前記制御器のパラメータ、前記第1時系列データ、及び前記第2時系列データから、前記制御器に入力する入力信号の時系列データの推定値である第3時系列データを推定すること、
前記第2時系列データと前記第3時系列データとに基づいて、前記制御器に対する相補感度関数を算出すること、及び
前記制御システムの入力信号を前記相補感度関数に印加したときの出力である第4時系列データを算出すること、
を含む算出方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-106908 | 2019-06-07 | ||
| JP2019106908A JP2020201626A (ja) | 2019-06-07 | 2019-06-07 | 情報処理装置及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020246531A1 true WO2020246531A1 (ja) | 2020-12-10 |
Family
ID=73652221
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/022049 WO2020246531A1 (ja) | 2019-06-07 | 2020-06-04 | 情報処理装置、プログラム、及び算出方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2020201626A (ja) |
| WO (1) | WO2020246531A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116577995A (zh) * | 2023-07-05 | 2023-08-11 | 广州惠特节能科技有限公司 | 热泵烘干机组参数智能控制方法及系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010136504A (ja) * | 2008-12-03 | 2010-06-17 | Sumitomo Heavy Ind Ltd | モータ制御装置及びその設計方法 |
| JP2017182624A (ja) * | 2016-03-31 | 2017-10-05 | ブラザー工業株式会社 | パラメータ更新方法、パラメータ更新装置、及びプログラム |
| JP2018112857A (ja) * | 2017-01-11 | 2018-07-19 | 横河電機株式会社 | データ処理装置及びデータ処理方法 |
| US20180296759A1 (en) * | 2015-11-23 | 2018-10-18 | The University Of British Columbia | Methods and systems for closed-loop control of drug administration |
-
2019
- 2019-06-07 JP JP2019106908A patent/JP2020201626A/ja active Pending
-
2020
- 2020-06-04 WO PCT/JP2020/022049 patent/WO2020246531A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010136504A (ja) * | 2008-12-03 | 2010-06-17 | Sumitomo Heavy Ind Ltd | モータ制御装置及びその設計方法 |
| US20180296759A1 (en) * | 2015-11-23 | 2018-10-18 | The University Of British Columbia | Methods and systems for closed-loop control of drug administration |
| JP2017182624A (ja) * | 2016-03-31 | 2017-10-05 | ブラザー工業株式会社 | パラメータ更新方法、パラメータ更新装置、及びプログラム |
| JP2018112857A (ja) * | 2017-01-11 | 2018-07-19 | 横河電機株式会社 | データ処理装置及びデータ処理方法 |
Non-Patent Citations (1)
| Title |
|---|
| WAKAYAMA NAOYA, YUBAI KAZUHIRO, HIRAI JUNJI: "Correlation-based multivariable controller parameter tuning by using one-shot experimental", TRANSACTIONS OF THE SOCIETY OF INSTRUMENT AND CONTROL ENGINEERS, vol. 43, no. 5, 2007, pages 391 - 399, XP055770268 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116577995A (zh) * | 2023-07-05 | 2023-08-11 | 广州惠特节能科技有限公司 | 热泵烘干机组参数智能控制方法及系统 |
| CN116577995B (zh) * | 2023-07-05 | 2023-11-21 | 广州惠特节能科技有限公司 | 热泵烘干机组参数智能控制方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020201626A (ja) | 2020-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5523624B2 (ja) | 制御装置及び制御のための出力変数を計算する方法 | |
| JP5723582B2 (ja) | スライディング・モード制御方式において、制御器を構成する方法、プログラム及びシステム | |
| Matisko et al. | Noise covariance estimation for Kalman filter tuning using Bayesian approach and Monte Carlo | |
| JP2021051462A (ja) | 情報処理装置及びプログラム | |
| US20160055278A1 (en) | Method and Device for the Co-Simulation of Two Subsystems | |
| JP6718500B2 (ja) | 生産システムにおける出力効率の最適化 | |
| KR102038703B1 (ko) | 동적 전이 앙상블 모형을 통한 실시간 다변량 시계열 예측방법 및 그 시스템 | |
| KR102577188B1 (ko) | 목표 시스템에 대한 제어 시스템 생성 | |
| JP2019093472A (ja) | 制御装置及び機械学習装置 | |
| WO2020246531A1 (ja) | 情報処理装置、プログラム、及び算出方法 | |
| Miller et al. | 23 Real-Time Simulation of Physical Systems Using Simscape™ | |
| Chen et al. | Online identification of time‐delay jump Markov autoregressive exogenous systems with recursive expectation‐maximization algorithm | |
| CN110580373B (zh) | 预处理协同仿真方法和装置 | |
| WO2021006332A1 (ja) | 情報処理装置、プログラム、及び算出方法 | |
| JP2019053593A (ja) | 方策改善プログラム、方策改善方法、および方策改善装置 | |
| CN104345637B (zh) | 用于自适应基于数据的函数模型的方法和设备 | |
| Prescott et al. | Using high-fidelity multibody vehicle models in real-time simulations | |
| JP7207473B1 (ja) | 情報処理装置 | |
| JP7207474B1 (ja) | 情報処理装置 | |
| CN117290965B (zh) | 车辆仿真软件的车辆模型仿真试验仿真方法、设备及介质 | |
| JP7115656B1 (ja) | 制御装置、制御方法及びプログラム | |
| JP7287420B2 (ja) | 情報処理装置 | |
| Yin et al. | Generalized accelerated failure time frailty model for systems subject to imperfect preventive maintenance | |
| US11720542B2 (en) | Method for assessing validation points for a simulation model | |
| US9329584B2 (en) | Method, system and program for constructing a controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20819110 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20819110 Country of ref document: EP Kind code of ref document: A1 |