WO2020189607A1 - 情報処理装置 - Google Patents
情報処理装置 Download PDFInfo
- Publication number
- WO2020189607A1 WO2020189607A1 PCT/JP2020/011354 JP2020011354W WO2020189607A1 WO 2020189607 A1 WO2020189607 A1 WO 2020189607A1 JP 2020011354 W JP2020011354 W JP 2020011354W WO 2020189607 A1 WO2020189607 A1 WO 2020189607A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- deterioration
- equipment
- degree
- operation plan
- generation unit
- Prior art date
Links
- 230000010365 information processing Effects 0.000 title claims description 17
- 238000007689 inspection Methods 0.000 claims abstract description 142
- 230000006866 deterioration Effects 0.000 claims description 298
- 238000012545 processing Methods 0.000 claims description 11
- 230000015556 catabolic process Effects 0.000 abstract 7
- 238000006731 degradation reaction Methods 0.000 abstract 7
- 230000000593 degrading effect Effects 0.000 abstract 1
- 238000009434 installation Methods 0.000 abstract 1
- 230000014509 gene expression Effects 0.000 description 64
- 238000000034 method Methods 0.000 description 41
- 238000010586 diagram Methods 0.000 description 24
- 238000004891 communication Methods 0.000 description 19
- 238000012986 modification Methods 0.000 description 18
- 230000004048 modification Effects 0.000 description 18
- 230000008859 change Effects 0.000 description 15
- 230000006870 function Effects 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 10
- 230000007797 corrosion Effects 0.000 description 10
- 238000005260 corrosion Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 8
- 230000008439 repair process Effects 0.000 description 6
- 238000002845 discoloration Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 238000005336 cracking Methods 0.000 description 4
- 230000008014 freezing Effects 0.000 description 4
- 238000007710 freezing Methods 0.000 description 4
- 238000001556 precipitation Methods 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000013473 artificial intelligence Methods 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000010295 mobile communication Methods 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 235000002639 sodium chloride Nutrition 0.000 description 2
- 239000011780 sodium chloride Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical compound C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000003608 fece Anatomy 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- JEIPFZHSYJVQDO-UHFFFAOYSA-N iron(III) oxide Inorganic materials O=[Fe]O[Fe]=O JEIPFZHSYJVQDO-UHFFFAOYSA-N 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 239000006249 magnetic particle Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 125000000391 vinyl group Chemical group [H]C([*])=C([H])[H] 0.000 description 1
- 229920002554 vinyl polymer Polymers 0.000 description 1
Images























Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01D—CONSTRUCTION OF BRIDGES, ELEVATED ROADWAYS OR VIADUCTS; ASSEMBLY OF BRIDGES
- E01D22/00—Methods or apparatus for repairing or strengthening existing bridges ; Methods or apparatus for dismantling bridges
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04G—SCAFFOLDING; FORMS; SHUTTERING; BUILDING IMPLEMENTS OR AIDS, OR THEIR USE; HANDLING BUILDING MATERIALS ON THE SITE; REPAIRING, BREAKING-UP OR OTHER WORK ON EXISTING BUILDINGS
- E04G23/00—Working measures on existing buildings
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
Definitions
- the present invention relates to a technique for supporting inspection work of equipment using an air vehicle.
- Patent Document 1 acquires rotation information indicating the orientation of the nacelle and the phase of the blade in the wind turbine to be inspected, and based on the rotation information, for inspection.
- the technology for generating the data of the flight route (inspection route) of the unmanned aircraft to acquire the data is disclosed.
- an object of the present invention is to balance the quality and cost when acquiring inspection data of a plurality of facilities having different progresses of deterioration.
- the present invention plans to operate a determination unit that determines the degree of deterioration of the equipment to be inspected based on the location conditions of the equipment, and an air vehicle that acquires inspection data from the plurality of the equipment.
- an information processing device including a generation unit that generates an operation plan that satisfies the inspection requirements of each facility according to the degree of deterioration determined for the plurality of facilities.
- the present invention it is possible to balance the quality and cost when acquiring inspection data of a plurality of facilities having different progresses of deterioration.
- FIG. 1 shows an example of the overall configuration of the equipment inspection system 1 according to the embodiment.
- the equipment inspection system 1 is a system that supports the inspection work of equipment using an air vehicle.
- the equipment to be inspected is, for example, bridges, buildings, tunnels, etc., and the degree of deterioration is regularly inspected and repairs are carried out if necessary.
- the mobile communication base station is the equipment to be inspected.
- the equipment to be inspected deteriorates due to corrosion, peeling, falling off, breaking, cracking, deformation, discoloration, etc.
- Equipment inspections are performed using inspection data, which is data for determining the degree of deterioration (degree of deterioration) due to corrosion and the necessity of repairs.
- the inspection data is, for example, measurement data of an infrared sensor, measurement data of an ultrasonic sensor, measurement data of a millimeter wave sensor, or the like.
- the photographing data data (data indicating a still image or a moving image) taken by the photographing means is used as the inspection data.
- the degree of deterioration and the necessity of repair based on the inspection data are mainly determined by the person in charge of inspection.
- the person in charge of inspection may judge the degree of deterioration by looking at the displayed inspection data, or determine the degree of deterioration after having the computer perform a process (image processing, etc.) for further analysis of the inspection data. May be good. It is not necessary to limit the subject of the judgment to a person, and for example, AI (Artificial Intelligence) may be made to judge the degree of deterioration or the like.
- AI Artificial Intelligence
- the equipment inspection system 1 includes a network 2, a server device 10, a drone 20, a radio 30, and a base terminal 40.
- the network 2 is a communication system including a mobile communication network, the Internet, and the like, and relays data exchange between devices accessing the own system.
- the server device 10 and the base terminal 40 access the network 2 by wired communication (may be wireless communication), and the drone 20 and the radio 30 access by wireless communication.
- the drone 20 is a rotorcraft-type flying object that flies by rotating one or more rotorcrafts, and has a photographing function for photographing surrounding images.
- the drone 20 flies according to the operation of the operator and acquires inspection data (photographed data of equipment).
- the drone 20 is deployed at a base such as a sales office of an inspection company.
- the radio 30 (transmitter) is a device that performs proportional control (proportional control), and is used by the operator to operate the drone 20.
- the server device 10 performs a process of determining the degree of deterioration of the equipment to be inspected, a process of generating an operation plan of the drone 20 based on the determined degree of deterioration, and the like.
- the server device 10 is an example of the "information processing device" of the present invention.
- the degree of deterioration determined by the server device 10 and the degree of deterioration determined by the inspector or the like based on the inspection data are common in that they represent the degree of deterioration of the equipment. It's different. Details of each degree of deterioration will be described later.
- the server device 10 outputs the generated operation plan to, for example, the base terminal 40.
- the base terminal 40 is installed at, for example, a base where the drone 20 is deployed, displays the output operation plan, and transmits it to the person in charge of work.
- the person in charge of work is a person in charge of flying the drone 20 and acquiring inspection data.
- the worker carries the drone 20 according to the transmitted operation plan, flies the drone 20 around the planned equipment, and acquires inspection data.
- FIG. 2 shows an example of the hardware configuration of the server device 10.
- the server device 10 may be physically configured as a computer device including a processor 11, a memory 12, a storage 13, a communication device 14, a bus 15, and the like.
- the word "device” can be read as a circuit, a device, a unit, or the like.
- each device may be included one or more, or some devices may not be included.
- the processor 11 operates, for example, an operating system to control the entire computer.
- the processor 11 may be configured by a central processing unit (CPU: Central Processing Unit) including an interface with peripheral devices, a control device, an arithmetic unit, a register, and the like.
- CPU Central Processing Unit
- the baseband signal processing unit and the like may be realized by the processor 11. Further, the processor 11 reads a program (program code), a software module, data, and the like from at least one of the storage 13 and the communication device 14 into the memory 12, and executes various processes according to the read program and the like.
- a program program code
- the program a program that causes a computer to execute at least a part of the operations described in the above-described embodiment is used.
- the various processes described above are executed by one processor 11, they may be executed simultaneously or sequentially by two or more processors 11.
- the processor 11 may be implemented by one or more chips.
- the program may be transmitted from the network via a telecommunication line.
- the memory 12 is a computer-readable recording medium.
- the memory 12 may be composed of at least one such as a ROM (ReadOnlyMemory), an EPROM (ErasableProgrammableROM), an EPROM (ElectricallyErasableProgrammableROM), and a RAM (RandomAccessMemory).
- the memory 12 may be called a register, a cache, a main memory (main storage device), or the like.
- the memory 12 can store a program (program code), a software module, or the like that can be executed to implement the wireless communication method according to the embodiment of the present disclosure.
- the storage 13 is a computer-readable recording medium, and is, for example, an optical disk such as a CD-ROM (Compact Disc ROM), a hard disk drive, a flexible disk, or a magneto-optical disk (for example, a compact disk, a digital versatile disk, or a Blu-ray). It may consist of at least one (registered trademark) disk), smart card, flash memory (eg, card, stick, key drive), floppy (registered trademark) disk, magnetic strip, and the like.
- an optical disk such as a CD-ROM (Compact Disc ROM), a hard disk drive, a flexible disk, or a magneto-optical disk (for example, a compact disk, a digital versatile disk, or a Blu-ray). It may consist of at least one (registered trademark) disk), smart card, flash memory (eg, card, stick, key drive), floppy (registered trademark) disk, magnetic strip, and the like.
- the storage 13 may be called an auxiliary storage device.
- the storage medium described above may be, for example, a database, server or other suitable medium containing at least one of the memory 12 and the storage 13.
- the communication device 14 is hardware (transmission / reception device) for communicating between computers via at least one of a wired network and a wireless network.
- the communication device 14 is also referred to as, for example, a network device, a network controller, a network card, a communication module, or the like.
- the above-mentioned transmission / reception antenna, amplifier unit, transmission / reception unit, transmission line interface, and the like may be realized by the communication device 14.
- the transmission / reception unit may be physically or logically separated from each other in the transmission unit and the reception unit.
- each device such as the processor 11 and the memory 12 is connected by a bus 15 for communicating information.
- the bus 15 may be configured by using a single bus, or may be configured by using a different bus for each device.
- FIG. 3 shows an example of the hardware configuration of the drone 20.
- the drone 20 is physically a computer including a processor 21, a memory 22, a storage 23, a communication device 24, a flight device 25, a sensor device 26, a battery 27, a camera 28, a bus 29, and the like. It may be configured as a device.
- the hardware of the same name shown in FIG. 2 such as the processor 21 is the same type of hardware as in FIG. 2, although there are differences in performance and specifications.
- the communication device 24 has a function of communicating with the radio 30 (for example, a wireless communication function using radio waves in the 2.4 GHz band) in addition to the communication with the network 2.
- the flight device 25 includes a motor, a rotor, and the like, and is a device for flying its own aircraft. The flight device 25 can move its own aircraft in all directions and make its own aircraft stationary (hovering) in the air.
- the sensor device 26 is a device having a sensor group for acquiring information necessary for flight control.
- the sensor device 26 has, for example, a position sensor that measures the position (latitude and longitude) of the own machine and a direction in which the own machine is facing (the front direction of the own machine is determined by the drone, and the determined front direction). It is equipped with a direction sensor that measures the direction in which the aircraft is facing) and an altitude sensor that measures the altitude of the aircraft.
- the sensor device 26 includes a speed sensor for measuring the speed of the own machine and an inertial measurement sensor (IMU (Inertial Measurement Unit)) for measuring the angular speed of three axes and the acceleration in three directions.
- the battery 27 is a device that stores electric power and supplies electric power to each part of the drone 20.
- the camera 28 includes an image sensor, optical system parts, and the like, and photographs an object in the direction in which the lens is facing.
- FIG. 4 shows an example of the hardware configuration of the radio 30.
- the radio 30 may be physically configured as a computer device including a processor 31, a memory 32, a storage 33, a communication device 34, an input device 35, an output device 36, a bus 37, and the like.
- the hardware of the same name shown in FIG. 2 such as the processor 31 is the same type of hardware as in FIG. 2, although there are differences in performance and specifications.
- the input device 35 is an input device (for example, a switch, a button, a sensor, etc.) that receives an input from the outside.
- the input device 35 includes a left stick 351 and a right stick 352, and accepts an operation on each stick as a movement operation in the front-back direction, the up-down direction, the left-right direction, and the rotation direction of the drone 20.
- the output device 36 is an output device (for example, a monitor 361, a speaker, an LED (Light Emitting Diode) lamp, etc.) that outputs to the outside.
- the input device 35 and the output device 36 may have an integrated configuration (for example, the monitor 361 is a touch screen).
- FIG. 5 shows an example of the hardware configuration of the base terminal 40.
- the base terminal 40 may be physically configured as a computer device including a processor 41, a memory 42, a storage 43, a communication device 44, an input device 45, an output device 46, a bus 47, and the like. ..
- the input device 45 may be, for example, a keyboard, a mouse, a microphone, or the like.
- each of the above devices includes hardware such as a microprocessor, a digital signal processor (DSP: Digital Signal Processor), an ASIC (Application Specific Integrated Circuit), a PLD (Programmable Logic Device), and an FPGA (Field Programmable Gate Array). It may be composed of. Further, in each of the above devices, a part or all of each functional block may be realized by the hardware. For example, the processor 11 may be implemented using at least one of the hardware.
- Each function in each device included in the equipment inspection system 1 is performed by the processor by loading predetermined software (program) on the hardware such as each processor and memory, and the communication by each communication device is controlled. It is achieved by controlling at least one of reading and writing of data in memory and storage.
- FIG. 6 shows the functional configuration realized by each device.
- the server device 10 includes an operation plan generation unit 101, an equipment information storage unit 102, a deterioration degree determination unit 103, and a location condition acquisition unit 104.
- the base terminal 40 includes an operation plan display unit 401.
- the operation plan generation unit 101 generates an operation plan for operating the drone 20 that acquires inspection data from a plurality of equipment to be inspected.
- the operation plan generation unit 101 is an example of the “generation unit” of the present invention.
- the operation plan is, for example, a plan showing the time and place of movement (including manual movement), flight and shooting of the drone 20.
- the operation plan generation unit 101 generates an operation plan based on the equipment information regarding the equipment to be inspected and the degree of deterioration determined for each equipment.
- the equipment information is stored in the equipment information storage unit 102, and the degree of deterioration is determined by the degree of deterioration determination unit 103.
- the equipment information storage unit 102 is a function of storing equipment information.
- FIG. 7 shows an example of stored equipment information.
- the equipment information storage unit 102 stores equipment information in which the equipment name, the equipment position (for example, latitude and longitude), the reference inspection time, the establishment time, and the latest inspection date are associated with each other.
- the standard inspection time is the standard time required to acquire the inspection data of the equipment.
- the standard inspection time includes the time for preparing and cleaning up the drone 20 to fly, and shall be equal to the time spent in the place where the equipment is located.
- the standard inspection time becomes longer as the route to fly the drone 20 becomes longer when acquiring inspection data. Since the flight path of the drone 20 is determined for each base station according to the direction in which the inspection data is acquired and the height at which the drone 20 is raised, the reference inspection time is also determined according to the length of the determined flight path. ..
- the equipment information including the reference inspection time is input by, for example, a business operator related to the equipment and stored in the equipment information storage unit 102. It is assumed that the equipment information storage unit 102 always stores the latest equipment information.
- Deterioration degree determination unit 103 determines the degree of deterioration of the equipment to be inspected based on the location conditions of the equipment.
- the deterioration degree determination unit 103 is an example of the "determination unit" of the present invention.
- the deterioration degree determination unit 103 makes a determination using the location conditions that affect the progress of deterioration of the equipment.
- the deterioration degree determination unit 103 uses the distance from the place where the causative component of the deterioration of the equipment is contained in the air as the location condition.
- the causative component of deterioration is, for example, sea salt particles or chemical substances. Sea salt particles come from the sea, and chemicals come from factories. Therefore, the place where the causative component is contained in the air is the sea, a factory, or the like.
- the deterioration degree determination unit 103 uses the distance between the equipment and the sea as a location condition. In this embodiment, the distance between the equipment and the coastline closest to the equipment and the equipment is simply used as the distance between the equipment and the sea.
- the operation plan generation unit 101 generates an operation plan for one year at the beginning of each year, for example. In this embodiment, it is assumed that all base stations are inspected every 5 years.
- the operation plan generation unit 101 reads out the equipment information whose latest inspection date is the year five years ago from the equipment information storage unit 102. Assuming that the present is 2019, in the example of FIG. 7, the equipment information of the base stations ⁇ , ⁇ , and ⁇ is read out because the latest inspection date is 2014, which is five years ago.
- the operation plan generation unit 101 requests the deterioration degree determination unit 103 to determine the degree of deterioration of the equipment from which the equipment information has been read, that is, the equipment to be inspected.
- the deterioration degree determination unit 103 requests the location condition acquisition unit 104 for the location condition of the equipment for which the deterioration degree determination is requested.
- the location condition acquisition unit 104 acquires the requested location conditions of the equipment to be inspected.
- the location condition acquisition unit 104 reads the position information of the equipment to be inspected from the equipment information storage unit 102.
- the location condition acquisition unit 104 stores in advance map data indicating the position of the coastline in latitude and longitude.
- the location condition acquisition unit 104 calculates the distance between each equipment and the nearest coastline based on the position information read out for each equipment to be inspected, and acquires the value of the calculated distance as the location condition.
- the location condition acquisition unit 104 supplies the acquired location conditions of the equipment to be inspected to the deterioration degree determination unit 103.
- the deterioration degree determination unit 103 determines that the longer the period elapsed from the establishment of the equipment (hereinafter, simply referred to as “elapsed period”), the greater the degree of deterioration.
- the deterioration degree determination unit 103 stores the relational expression between the elapsed period and the deterioration degree.
- FIG. 8 shows an example of the relational expression between the elapsed period and the degree of deterioration. In FIG. 8, a graph is shown in which the horizontal axis indicates the elapsed period (unit is “year”) and the vertical axis indicates the degree of deterioration (“low”, “medium”, and “large”).
- the graph of FIG. 8 shows the relational expressions B1, B2, and B3 between the elapsed period and the degree of deterioration.
- the slope of each relational expression has a relation of B1 ⁇ B2 ⁇ B3.
- relational expression B1 the degree of deterioration becomes "high” after about 23 years, but with relational expression B2, only about 18 years have passed, and with relational expression B3, about 13 years have passed. Is "high”.
- the deterioration degree determination unit 103 determines the relational expression used for the determination according to the location condition of the equipment to be inspected.
- Each relational expression represents a time-series change in the degree of deterioration.
- the time-series change of the degree of deterioration is represented linearly (that is, by a linear function), but it may be represented by a relational expression including a curve.
- Each relational expression is determined based on, for example, the progress of deterioration of the equipment observed in the past or the physical properties of the objects (concrete, iron, vinyl, etc.) constituting the equipment. In either case, the degree of deterioration will always increase with the passage of time (the degree of deterioration will not decrease unless there is repair, etc.).
- the deterioration degree determination unit 103 determines the relational expression using the relational expression table in which the location condition and the relational expression are associated with each other.
- FIG. 9 shows an example of the relational expression table.
- the relational expressions "B3", “B2" and “B1" are associated with the location conditions of "less than Th11", “Th11 or more and less than Th12" and "Th12 or more".
- the value of the location condition means the distance between the above-mentioned equipment to be inspected and the sea.
- the deterioration degree determination unit 103 determines the relational expression to be used for each equipment based on the location condition of each equipment to be inspected supplied from the location condition acquisition unit 104.
- the deterioration degree determination unit 103 determines that the relational expression B2 is used if, for example, the distance between the base station ⁇ and the sea is “Th11 or more and less than Th12”, and the distance between the base station ⁇ and the sea is “less than Th11”. For example, it is determined that the relational expression B3 is used.
- the deterioration degree determination unit 103 reads out the establishment time of the equipment to be inspected from the equipment information storage unit 102, and calculates the elapsed period from the read-out establishment time to the present.
- the deterioration degree determination unit 103 determines the deterioration degree of each equipment by substituting the elapsed period calculated for each equipment into the determined relational expression. If the base station ⁇ is the base station ⁇ , the deterioration degree determination unit 103 determines that the deterioration degree is “medium” because the elapsed period is 15 years and the relational expression B2 is determined to be used from the location conditions.
- the deterioration degree determination unit 103 determines, for example, that the degree of deterioration is "medium” if the elapsed period is 20 years and the relational expression is B1, but even if the same elapsed period is 20 years, the relational expression is B2 (that is, that is). If the equipment is closer to the sea), the degree of deterioration is judged to be "high".
- the deterioration degree determination unit 103 increases the slope of the time-series change of the deterioration degree as the equipment closer to the place where the causative component of the deterioration of the equipment to be inspected is contained in the air (“sea” in this embodiment). To determine the degree of deterioration.
- the deterioration degree determination unit 103 supplies the determination result for each equipment to be inspected to the operation plan generation unit 101.
- the operation plan generation unit 101 generates an operation plan that satisfies the supplied determination result, that is, the inspection requirement of each facility according to the degree of deterioration determined for the plurality of facilities.
- the inspection requirement for each facility is, for example, the requirement to secure the travel time from the base of the drone 20 to the facility.
- the inspection requirements also include the requirement to secure the time required for the inspection as the staying time at each facility.
- the operation plan generation unit 101 secures at least the above-mentioned reference inspection time as the time (stay time) required for the inspection, but secures a time longer than the reference inspection time depending on the degree of deterioration of the equipment.
- the operation plan generation unit 101 generates an operation plan by expecting a longer time required for acquiring inspection data for equipment having a higher degree of deterioration determined by the deterioration degree determination unit 103.
- the operation plan generation unit 101 generates an operation plan using a coefficient table in which the degree of deterioration and the inspection time coefficient are associated with each other.
- the inspection time coefficient is a coefficient for obtaining the time expected to be required for the actual inspection by multiplying the reference inspection time.
- FIG. 10 shows an example of a coefficient table.
- the inspection time coefficients of "1.0", “1.2” and “1.4” are associated with the deterioration degrees of "low”, “medium” and “high”. Since the inspection time coefficient is "1.0" for the equipment whose deterioration degree is "low", the operation plan generation unit 101 uses the reference inspection time as it is as the time required for the inspection at the equipment, that is, the staying time. Use to generate an operation plan.
- the operation plan generation unit 101 generates an operation plan by using the time obtained by multiplying the standard inspection time by 1.2 as the staying time at the equipment for the equipment whose deterioration degree is "medium”. Further, the operation plan generation unit 101 generates an operation plan by using the time obtained by multiplying the standard inspection time by 1.4 as the staying time in the equipment for the equipment having the determined deterioration degree of "high”. The operation plan generation unit 101 calculates the travel time from the base of the drone 20 to each facility and the travel time between facilities based on the position of each base station indicated by the acquired facility information.
- the operation plan generation unit 101 calculates, for example, the time required when traveling at an average speed of 30 km / h in consideration of signals and the like as the travel time for the distance along the road as the travel route. Based on the calculated travel time and the staying time at each facility determined as described above, the operation plan generation unit 101 departs from the base of the drone 20, goes around each base station, and then arrives at the base by a predetermined time. Specify the combination of base stations that can arrive and the order of base stations to be inspected.
- the operation plan generation unit 101 When the operation plan generation unit 101 specifies the combination and order of the base stations, the operation plan generation unit 101 generates an operation plan in which the date on which the inspection is scheduled to be performed is associated with the specified combination and order.
- the operation plan generation unit 101 repeatedly specifies the combination and order of base stations and generates operation plan data for each date on which the inspection is scheduled, and continues to generate the operation plan until there are no more base stations to be inspected.
- the operation plan generation unit 101 transmits the generated operation plan to, for example, the base terminal 40.
- the operation plan display unit 401 of the base terminal 40 displays the operation plan transmitted from the server device 10.
- FIG. 11 shows an example of the displayed operation plan.
- the operation plan display unit 401 displays a list in which the inspection date and the equipment to be inspected are associated with each other.
- the equipment to be inspected is displayed side by side in the order of inspection.
- the person in charge of the inspection work carries out the inspection work by looking at the displayed operation plan.
- the operation plan generation unit 101 shows the movement time between the base and the equipment, the movement time between the equipment, the staying time at each equipment, and the like.
- An operation plan may be generated.
- Each device included in the equipment inspection system 1 performs a generation process for generating an operation plan based on the degree of deterioration determined for each equipment based on the above configuration.
- FIG. 12 shows an example of the operation procedure of each device in the generation process. The operation procedure of FIG. 12 is started, for example, when a person in charge of operation management of the base performs an operation of displaying an operation plan on the base terminal 40.
- the server device 10 receives the request for the operation plan (step S11)
- the server device 10 selects the equipment to be inspected by reading out the equipment information of the equipment to be inspected (step S12).
- the server device 10 acquires the location conditions of the selected equipment (step S13).
- the server device 10 determines the deterioration degree of the equipment to be inspected based on the acquired location conditions (step S14).
- the server device 10 calculates the time required for inspection (that is, staying time) in each facility based on the determined degree of deterioration (step S15). Subsequently, the server device 10 (operation plan generation unit 101) determines the inspection date for which the operation plan is to be generated (step S21), and determines the combination of equipment to be inspected and the inspection order on the determined inspection date. , Specify based on the location of each facility, the calculated staying time, and the like (step S22).
- the server device 10 (operation plan generation unit 101) generates an operation plan based on the combination and order of the specified equipment (step S23). Then, the server device 10 (operation plan generation unit 101) determines whether or not the generation of the operation plan is completed for all the facilities (step S24). If it is determined that the server device 10 is not completed (NO), the server device 10 returns to step S21 to perform an operation, and if it is determined that the server device 10 is completed (YES), the operation procedure of FIG. 12 is terminated.
- Equipment such as base stations deteriorates as the period of time has passed since its establishment, but the way it deteriorates changes depending on the location conditions. It is desirable to inspect equipment with advanced deterioration using high-quality inspection data, but the higher the quality of inspection data, the higher the cost.
- the quality referred to here is represented by, for example, the number of images, the resolution of the image, the number of angles of the captured location, and the like.
- the cost for acquiring inspection data is the labor cost of the inspector, the initial cost of the drone 20, the maintenance cost, and the like.
- the higher the quality of inspection data the longer the inspection will take, the more expensive drones and cameras will be required, and the higher the cost of acquiring inspection data. Therefore, if high-quality inspection data is acquired even for equipment that has not progressed in deterioration, the cost will be higher than necessary.
- the operation plan is generated by changing the staying time, that is, the time required for the inspection, according to the degree of deterioration of the equipment.
- the quality of the inspection data of the equipment that has deteriorated can be made higher than the quality of the inspection data of the equipment that has not deteriorated.
- the degree of deterioration was determined according to the distance from a place (for example, the sea) containing the causative component of the deterioration of the equipment in the air. As a result, the accuracy of determining the degree of deterioration can be improved as compared with the case where the influence of the component causing the deterioration on the deterioration is not taken into consideration.
- a common index may be obtained by combining various modifications using different parameters in order to obtain a common index (for example, the degree of deterioration) and using each parameter together.
- one index may be obtained by integrating the individually obtained indexes according to some rules. Further, when obtaining a common index, different weighting may be applied to each parameter used.
- the method of generating the operation plan may be different from that of the embodiment.
- the operation plan generation unit 101 generates an operation plan by assuming that the equipment having a higher degree of deterioration determined by the deterioration degree determination unit 103 has a longer travel time before and after the equipment.
- the operation plan generation unit 101 generates an operation plan using a coefficient table in which the degree of deterioration and the travel time coefficient are associated with each other.
- the operation plan generation unit 101 defines, for example, the travel time calculated by the same method as in the embodiment as the reference travel time.
- the travel time coefficient is a coefficient to be multiplied by the reference travel time, and is determined to obtain the travel time to be secured in the actual inspection.
- FIG. 13 shows an example of the coefficient table of this modified example. In the example of FIG. 13, the deterioration degrees of “low”, “medium” and “high” are associated with the travel time coefficients of “1.0”, “1.2” and “1.4”.
- the operation plan generation unit 101 Since the travel time coefficient is "1.0" for the equipment whose deterioration degree is "low", the operation plan generation unit 101 generates an operation plan by using the reference travel time before and after the equipment as it is. To do.
- the operation plan generation unit 101 generates an operation plan by multiplying the reference travel time before and after the equipment by 1.2 for the equipment whose deterioration degree is "medium”. Further, the operation plan generation unit 101 generates an operation plan by multiplying the reference travel time before and after the equipment by 1.4 for the equipment whose deterioration degree is "high".
- the operation plan generation unit 101 inspects the facilities having different degrees of deterioration in order
- the operation plan is generated by adopting the longer one of the movement times between the facilities.
- the operation plan generation unit 101 adopts 1.4 times the reference travel time as the travel time when moving from the equipment having the deterioration degree “low” to the equipment having the deterioration degree “high”.
- the equipment having a higher degree of deterioration can be reliably inspected with a longer moving time.
- the operation plan generation method may be different from each of the above examples.
- the operation plan generation unit 101 generates an operation plan in which the equipment with a higher degree of deterioration determined by the deterioration degree determination unit 103 has an earlier acquisition time of inspection data.
- the operation plan generation unit 101 generates an operation plan using a priority table in which the degree of deterioration and the priority of the inspection time are associated with each other.
- FIG. 14 shows an example of a priority table.
- the deterioration degree of “low”, “medium” and “high” is associated with the priority of inspection time of “low”, “medium” and “high”.
- the operation plan generation unit 101 shall generate an operation plan for one year as described in the embodiment. For example, the operation plan generation unit 101 divides one year into three periods (first half: 1 to April, middle: May to August, second half: September to December).
- the operation plan generation unit 101 generates an operation plan to be inspected in the latter stage because the priority is "low” for the equipment whose deterioration degree is “low". Similarly, the operation plan generation unit 101 generates an operation plan for inspecting the equipment having the determined deterioration degree of "medium” in the middle period and inspecting the equipment having the determined deterioration degree of "high” in the previous period. ..
- this modified example by advancing the acquisition time of inspection data of equipment with a high degree of deterioration as described above, a failure occurs because the inspection of the equipment is not in time compared to the case where the acquisition time is determined without considering the degree of deterioration. Then, such a situation can be reduced.
- the operation plan generation method may be different from each of the above examples.
- the operation plan generation unit 101 generates an operation plan that shortens the cycle of acquiring inspection data as the equipment has a higher degree of deterioration determined by the deterioration degree determination unit 103.
- the operation plan generation unit 101 generates an operation plan using a cycle table in which the degree of deterioration and the acquisition cycle are associated with each other.
- FIG. 15 shows an example of a periodic table.
- the deterioration degrees of “low”, “medium” and “high” are associated with the acquisition cycles of “5 years”, “4 years” and “3 years”.
- the operation plan generation unit 101 shall generate an operation plan for one year at the beginning of each year as described in the embodiment.
- the operation plan generation unit 101 requests the deterioration degree determination unit 103 for the degree of deterioration of all the equipment before reading the equipment information of the equipment to be inspected.
- the deterioration degree determination unit 103 determines the deterioration degree of all the requested equipment, and supplies the determination result to the operation plan generation unit 101.
- the operation plan generation unit 101 generates an operation plan as an inspection target when the latest inspection date is 5 years ago for equipment having a “low” degree of deterioration. Further, the operation plan generation unit 101 generates an operation plan as an inspection target when the latest inspection date is four years ago for equipment having a "medium" degree of deterioration.
- the operation plan generation unit 101 generates an operation plan as an inspection target when the latest inspection date is 3 years ago for equipment having a "high degree of deterioration".
- the equipment with a higher degree of deterioration has a shorter inspection data acquisition cycle, so that the inspection of the equipment is not in time and a failure occurs compared to the case where the inspection target is determined without considering the degree of deterioration. It is possible to reduce the situation when it occurs.
- the method of generating the operation plan may be different from each of the above examples.
- the inspection data acquired by the drone 20 for example, image data obtained by photographing the equipment as described in the embodiment is used.
- the image data may be still image data or moving image data.
- the operation plan generation unit 101 generates an operation plan for acquiring inspection data on a day when the shooting conditions are better for the equipment having a higher degree of deterioration determined by the deterioration degree determination unit 103.
- the shooting conditions are so good that, for example, the amount of light is large and shadows are hard to be formed.
- the amount of light increases as the day rises, so it increases as the time approaches noon and increases as the daylight hours approach the summer solstice.
- the shadow becomes shorter as it gets closer to noon, and it is harder to make it a little cloudy than when it is fine.
- the shooting conditions may be better if it is slightly cloudy.
- the operation plan generation unit 101 specifies the shooting condition according to the date of the inspection date and the inspection time zone. In this case, the operation plan generation unit 101 generates, for example, an operation plan for one year.
- the operation plan generation unit 101 uses the tendency of the shooting conditions of each season throughout the year, for example, the shooting conditions are bad during the rainy season and the shooting conditions are good in the summer. May generate an operation plan.
- the operation plan generation unit 101 may specify the shooting conditions by using the weather forecast. In that case, the operation plan generation unit 101 acquires, for example, weather forecast information in the area including the location of the equipment to be inspected from the system of the provider of the weather forecast service or the like, and wind speed and precipitation included in the weather forecast. To get.
- the operation plan generation unit 101 specifies the shooting conditions for each inspection day by using the shooting condition table in which the wind speed and precipitation are associated with the shooting conditions.
- 16A and 16B show an example of a shooting condition table.
- the wind speeds of "less than Th21", “Th21 or more and less than Th22", and "Th22 or more” are associated with the shooting conditions of "good”, “possible”, and "bad".
- the precipitation amounts of "less than Th31", “Th31 or more and less than Th32", and “Th32 or more” are associated with the shooting conditions of "good”, “possible”, and “bad”.
- the operation plan generation unit 101 selects the worse of the shooting conditions associated with the forecasted wind speed and precipitation for each inspection day in a week (for example, "good” and “OK” if "OK”). ), Specify as the shooting conditions on the day of the inspection.
- the operation plan generation unit 101 may specify the shooting conditions by using both the shooting conditions depending on the height of the day and the shooting conditions depending on the weather conditions. In that case as well, the operation plan generation unit 101 specifies the worse shooting condition of each shooting condition as the shooting condition on the day of the inspection.
- the operation plan generation unit 101 generates an operation plan using a priority table in which the degree of deterioration and the priority of shooting conditions are associated with each other.
- FIG. 17 shows an example of the priority table of this modified example.
- the degree of deterioration of "low”, “medium” and “high” is associated with the priority of the shooting conditions of "low", “medium” and “high”.
- the operation plan generation unit 101 specifies the priority of the shooting conditions of each facility based on the determined deterioration degree.
- the operation plan generation unit 101 generates an operation plan by selecting equipment having a priority of the specified shooting conditions of "high” for the inspection days of which the shooting conditions are "good” among the inspection days of one week.
- the operation plan generation unit 101 generates an operation plan by selecting the equipment whose priority of the specified shooting condition is "medium” for the inspection date when the shooting condition is "possible", and the inspection date when the shooting condition is "bad". For, the operation plan is generated by selecting the equipment whose priority of the specified shooting conditions is "low”. The operation plan generation unit 101 may generate an operation plan in which the inspection is not performed on the inspection date when the shooting condition is “defective”.
- the operation plan generation unit 101 may specify the shooting conditions for each time zone and generate the operation plan. In that case, the operation plan generation unit 101 inspects the equipment with the specified shooting condition with the priority of "high” in the time zone when the shooting condition is "good", and sets the shooting condition to the time zone when the shooting condition is "possible”. Generates an operation plan for inspecting equipment with a "medium” priority for the identified shooting conditions.
- the higher the degree of deterioration of the equipment the better the shooting conditions at the time of inspection, so that the equipment that has deteriorated due to the indistinctness of the image of the equipment can be repaired compared to the case where the shooting conditions are not taken into consideration. It is possible to reduce the situation where the delay occurs.
- the deterioration degree determination unit 103 determines the deterioration degree based on an event that causes deterioration of the equipment (hereinafter referred to as “deterioration event”). More specifically, the deterioration degree determination unit 103 determines the deterioration degree of the equipment by changing the deterioration degree determination condition according to the occurrence state of the deterioration event.
- the determination condition is, for example, the slope of the time-series change of the degree of deterioration (the degree to which the degree of deterioration increases in a unit period) as shown in the relational expression of FIG.
- Deterioration events are specific weather conditions such as lightning, snow, storms or freezing.
- the equipment may be damaged by a direct load due to a storm or an impact such as a fallen tree, and repeated freezing may cause cracks in the concrete used in the equipment.
- Bird damage such as nesting and droppings is also included in the deterioration event because it may cause deterioration such as failure of electrical parts or corrosion of metal.
- the deterioration degree determination unit 103 determines the deterioration degree by increasing the slope of the time-series change of the deterioration degree in the equipment in the frequent occurrence area as compared with the equipment in the normal area.
- the deterioration degree determination unit 103 stores past weather data (data indicating the number of lightning days, the amount of snowfall, the maximum rainfall per day, the maximum wind speed, etc.) in advance. Keep it.
- the deterioration degree determination unit 103 refers to the meteorological data of the area including the equipment to be inspected, and determines whether it is a frequent occurrence area or a normal area.
- the deterioration degree determination unit 103 identifies, for example, an area where at least one of the number of days of lightning, the amount of snowfall, the maximum wind speed, and the minimum temperature is less than 0 degrees Celsius is equal to or higher than the threshold value set for each, as a frequent occurrence area. To do.
- the deterioration degree determination unit 103 may specify a frequent occurrence area when two or more weather conditions are equal to or more than a threshold value.
- the deterioration degree determination unit 103 may specify the frequent occurrence area including the bird damage as long as it stores the data obtained by totaling the number of occurrences of bird damage for each area.
- the deterioration degree determination unit 103 determines, for example, the deterioration degree of the equipment in the normal area by using the relational expression B1 shown in FIG. 8, and the deterioration degree of the equipment in the frequent occurrence area is determined by the relational expression shown in FIG. Judgment is made using B2 (a relational expression in which the slope of time-series change is larger than that of B1 and the degree of deterioration is likely to be high).
- the deterioration degree determination unit 103 determines using the relational expression B2 for the area where one deterioration event is equal to or more than the threshold value among the frequent occurrence areas, and is related to the area where two or more deterioration events are equal to or more than the threshold value.
- the degree of deterioration may be determined step by step by using the formula B3 (a relational expression in which the slope of the time-series change is larger than that of B2 and the degree of deterioration is likely to be higher).
- B3 a relational expression in which the slope of the time-series change is larger than that of B2 and the degree of deterioration is likely to be higher.
- the deterioration degree determination method may be different from that of the examples.
- the deterioration degree determination unit 103 used the distance from the sea as the location condition in the embodiment, but the location condition uses the distance from the factory, which is an example of a place where the causative component of the deterioration of the equipment is contained in the air like the sea. May be used as.
- the deterioration degree determination unit 103 may determine the deterioration degree based on a plurality of types of location conditions.
- the deterioration degree determination unit 103 specifies, for example, the relational expressions based on two or more location conditions in the same manner as in each of the above examples, and the slope of the time-series change of the deterioration degree is the highest among the specified relational expressions.
- the degree of deterioration is judged using a large one.
- the deterioration degree determination unit 103 normalizes the numerical values (distance from the sea, the number of lightning occurrences, the amount of snowfall, etc.) representing each location condition, and the representative value (average value, median value or maximum value) of the normalized numerical value. Etc.) may be associated with the relational expression to determine the degree of deterioration.
- the deterioration degree determination unit 103 may determine the deterioration degree after weighting each location condition by multiplying the normalized value by a weighting coefficient (the value of the location condition for which the weight is desired to be increased is large). Multiply the weighting factor). For example, when the causative component of the sea has a greater effect on deterioration than the causative component of the factory, the deterioration degree determination unit 103 weights the distance from the sea rather than the distance from the factory. Determine the degree of deterioration. When weighting is performed, the accuracy of the degree of deterioration can be improved as compared with the case where weighting is not performed.
- the method for judging the degree of deterioration may be different from that in the examples.
- the equipment may contain multiple components that deteriorate differently.
- the deterioration degree determination unit 103 makes the deterioration degree determination condition (for example, the slope of the time-series change of the deterioration degree described above) different for each component of the equipment, and then determines the deterioration degree for each component. judge.
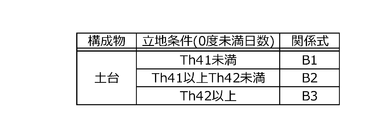
- the deterioration degree determination unit 103 prepares a relational expression table as shown in FIG. 9 for each component, and determines the degree of deterioration for each component.
- 18A to 18C show an example of the relational expression table of this modification.
- FIG. 18A in the location conditions (the number of days when the minimum temperature is less than 0 degrees) of “less than Th41”, “Th41 or more and less than Th42” and “Th42 or more”, FIG. 8 of “B1”, “B2” and “B3” is shown.
- the relational expression to be represented is associated.
- the relational expressions “B3”, “B2” and “B1” are associated with the location conditions (distance from the sea) of “less than Th51”, “Th51 or more and less than Th52” and “Th52 or more”.
- the relational expressions “B1”, “B2” and “B3” are associated with the location conditions (number of lightning occurrences) of “less than Th61”, “Th61 or more and less than Th62” and “Th62 or more”. ..
- the deterioration degree determination unit 103 most influences the deterioration degree of each component of the base, the steel tower, and the electrical equipment on the deterioration of each component. Judgment is based on the location conditions.
- the deterioration degree determination unit 103 may determine the degree of deterioration based on two or more location conditions for each component, not only based on the location conditions that most affect the deterioration of the components.
- the deterioration degree determination unit 103 may determine the deterioration degree by weighting the location conditions that most affect the deterioration of each component.
- a weighting method for example, a method of changing the threshold value represented in the relational expression table of the location condition having the greatest influence on deterioration so that the relational expression having a larger slope can be associated, or a location condition having the greatest influence on deterioration.
- a method may be used in which the slope of the associated relational expression is made larger than the slope of the relational expression associated with other location conditions.
- the operation plan generation unit 101 generates an operation plan by using the representative value of the deterioration degree for each component determined by the deterioration degree determination unit 103 as the deterioration degree of the equipment having the component for which the representative value is calculated.
- the representative value is, for example, an average value, a median value, a maximum value, or the like when the degree of deterioration of each component is expressed numerically.
- the operation plan generation unit 101 may generate an operation plan by using the calculated value as it is.
- the degree of deterioration is represented by a numerical value from 1 to 3
- the operation plan generation unit 101 shows the calculated degree of deterioration in FIG. 10 when the time required for the inspection is changed as in the embodiment, for example.
- the operation plan may be generated after converting to a value close to the time coefficient.
- the degree of deterioration of the entire equipment is higher than that in the case where the degree of deterioration of each component is not determined. It becomes easier to judge. As a result, as compared with the case where the degree of deterioration of each component is not determined, it is possible to reduce the situation in which a failure occurs because the repair of the component in which the deterioration has progressed is not in time.
- the method for determining the degree of deterioration may be different from each of the above examples.
- equipment deterioration such as corrosion, peeling, falling off, breaking, cracking, deformation and discoloration, but the magnitude of the influence of the location conditions is different for each type.
- corrosion including rust
- discoloration is greatly affected by the distance from the factory.
- the above-mentioned deterioration event includes long-term sunshine, but discoloration is greatly affected by long-term sunshine.
- the deterioration degree determination unit 103 determines the deterioration degree after making the deterioration degree determination condition (for example, the slope of the time-series change of the deterioration degree described above) different for each type of deterioration of the equipment.
- the deterioration degree determination unit 103 determines the deterioration degree based on a plurality of location conditions for each type of deterioration, for example.
- 19A to 19C show an example of the relational expression table of this modification.
- the location conditions distance from the sea
- FIG. 8 The relational expression shown in FIG. 8 is associated with the above.
- the deterioration degree determination unit 103 Since "corrosion” is greatly affected by the location condition of the distance from the sea, the deterioration degree determination unit 103 has a large slope of time-series change for equipment that is close to the sea (distance is less than Th71) and the degree of deterioration is large. The determination is made using the relational expression B3, which tends to be high. On the other hand, since "cracking" is not as greatly affected by the location condition of the distance from the sea as "corrosion", the deterioration degree determination unit 103 can be used even if the equipment has the same distance from the sea (distance is less than Th71). The determination is made using the relational expression B2 in which the slope of the time series change is smaller than that of B3.
- the deterioration degree determination unit 103 makes a determination using the relational expression B1 having the smallest slope of the time series change regardless of the location condition.
- a relational expression table is defined for "freezing” and the like.
- the relational expression table may be set for the location conditions other than the distance from the sea. In each relational expression table, the relational expression with a larger slope of time-series change is used as the type of deterioration is more affected by the location condition.
- the deterioration degree determination unit 103 determines the deterioration degree for each type of deterioration using each relational expression table.
- the operation plan generation unit 101 generates an operation plan using the representative value (average value, median value, maximum value, etc.) of the deterioration degree determined by the deterioration degree determination unit 103.
- the method of obtaining the representative values of the plurality of deterioration degrees is as described in the description of FIGS. 18A to 18C.
- the degree of deterioration of the entire equipment is higher than in the case where the degree of deterioration for each type of deterioration is not determined. It becomes easier to judge.
- the degree of deterioration for each type of deterioration is not determined, it is possible to reduce the situation in which a failure occurs because the repair of some types of equipment whose deterioration has progressed significantly cannot be completed in time.
- the deterioration degree determination unit 103 combines the examples of FIGS. 18A to 18C and FIGS. 19A to 19C to determine the degree of deterioration for each type of deterioration of the equipment components (for example, the time-series change of the degree of deterioration described above).
- the degree of deterioration may be determined for each component after making the inclination) different.
- the deterioration degree determination unit 103 may determine the deterioration degree including, for example, "cracking", "corrosion”, and "discoloration" of the base, which are the types of deterioration that are likely to occur in the concrete base.
- the deterioration degree determination unit 103 may determine the deterioration degree including the types of deterioration that are likely to occur in the painted metal tower, such as "corrosion” and "peeling", for the steel tower. Even with the same equipment, the types of deterioration that are likely to occur differ depending on the component, so by determining the deterioration for each component and for each type of deterioration, more accurate deterioration of the equipment is compared to the case where the determination method is uniform. The degree can be determined.
- the operation plan generation unit 101 may generate an operation plan for acquiring inspection data by using the drone 20 having a higher performance as the equipment with a higher degree of deterioration determined by the deterioration degree determination unit 103.
- the quality of the inspection data of the equipment that has deteriorated can be made higher than the quality of the inspection data of the equipment that has not deteriorated, as in the embodiment.
- a rotary-wing aircraft type air vehicle was used as the air vehicle for autonomous flight, but the present invention is not limited to this.
- the flying object that performs autonomous flight may be, for example, an airplane type flying object or a helicopter type flying object. In short, any flying object that can fly by the operation of the operator and has a function of acquiring inspection data may be used.
- the devices for realizing each function shown in FIG. 6 are not limited to the above-mentioned devices.
- the radio 30 or the base terminal 40 may realize the functions realized by the server device 10.
- the radio 30 or the base terminal 40 is an example of the "information processing device" of the present invention.
- it is sufficient that each function shown in FIG. 6 is realized in the entire equipment inspection system 1.
- the present invention provides an information processing system (equipment inspection system 1 is an example) including each information processing device and an air vehicle such as a drone 20 in addition to the information processing device such as the server device 10 described above. Can also be captured. Further, the present invention can be regarded as an information processing method for realizing the processing performed by each information processing device, and also as a program for operating a computer that controls each information processing device.
- the program regarded as the present invention may be provided in the form of a recording medium such as an optical disk in which the program is stored, or may be downloaded to a computer via a network such as the Internet, and the downloaded program may be installed and used. It may be provided in the form of
- each functional block may be realized by using one physically or logically connected device, or directly or indirectly (for example, two or more physically or logically separated devices). , Wired, wireless, etc.) and may be realized using these plurality of devices.
- the functional block may be realized by combining the software with the one device or the plurality of devices.
- Functions include judgment, decision, judgment, calculation, calculation, processing, derivation, investigation, search, confirmation, reception, transmission, output, access, solution, selection, selection, establishment, comparison, assumption, expectation, and assumption.
- broadcasting notifying, communicating, forwarding, configuring, reconfiguring, allocating, mapping, assigning, etc., but only these.
- a functional block that makes transmission function is called a transmitting unit or a transmitter.
- the method of realizing each of them is not particularly limited.
- Input / output direction information can be output from the upper layer (or lower layer) to the lower layer (or upper layer). Input / output may be performed via a plurality of network nodes.
- the input / output information, etc. may be stored in a specific location (for example, memory) or may be managed using a management table. Input / output information and the like can be overwritten, updated, or added. The output information and the like may be deleted. The input information or the like may be transmitted to another device.
- Judgment method Judgment may be performed by a value represented by 1 bit (0 or 1), by a boolean value (Boolean: true or false), or by comparing numerical values. (For example, comparison with a predetermined value) may be performed.
- Input / output information, etc. may be stored in a specific location (for example, memory) or managed by a management table. Input / output information and the like can be overwritten, updated, or added. The output information and the like may be deleted. The input information or the like may be transmitted to another device.
- Software Software is an instruction, instruction set, code, code segment, program code, program, sub, whether called software, firmware, middleware, microcode, hardware description language, or another name. It should be broadly interpreted to mean programs, software modules, applications, software applications, software packages, routines, subroutines, objects, executable files, execution threads, procedures, features, and so on.
- software, instructions, information, etc. may be transmitted and received via a transmission medium.
- a transmission medium For example, a website that uses at least one of wired technology (coaxial cable, fiber optic cable, twisted pair, digital subscriber line (DSL), etc.) and wireless technology (infrared, microwave, etc.) When transmitted from a server, or other remote source, at least one of these wired and wireless technologies is included within the definition of transmission medium.
- wired technology coaxial cable, fiber optic cable, twisted pair, digital subscriber line (DSL), etc.
- wireless technology infrared, microwave, etc.
- “Judgment”, “Decision” The terms “determining” and “determining” used in this disclosure may include a wide variety of actions. “Judgment” and “decision” are, for example, judgment, calculation, computing, processing, deriving, investigating, looking up, search, inquiry. It may include (eg, searching in a table, database or another data structure), ascertaining as “judgment” or “decision”.
- judgment and “decision” are receiving (for example, receiving information), transmitting (for example, transmitting information), input (input), output (output), and access.
- Accessing for example, accessing data in memory
- judgment and “decision” mean that "resolving”, “selecting”, “choosing”, “establishing”, “comparing”, etc. are regarded as “judgment” and “decision”.
- judgment and “decision” may include that some action is regarded as “judgment” and “decision”.
- judgment (decision)” may be read as “assuming", “expecting”, “considering” and the like.
- the notification of predetermined information is not limited to the explicit notification, but is performed implicitly (for example, the notification of the predetermined information is not performed). May be good.
- 1 ... Equipment inspection system, 2 ... Network, 10 ... Server device, 20 ... Drone, 30 ... Propo, 40 ... Base terminal, 101 ... Operation plan generation unit, 102 ... Equipment information storage unit, 103 ... Deterioration degree determination unit, 104 ... Location condition acquisition department, 401... Operation plan display department.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- Mechanical Engineering (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
劣化度判定部(103)は、設備の設立から経過した期間が長いほど劣化度が大きいと判定する。立地条件取得部(104)は、検査対象の設備の立地条件として、設備の劣化の原因成分を空気中に含む場所(海及び工場等)との距離を取得する。劣化度判定部(103)は、取得された立地条件が示す距離が近い設備ほど劣化度の時系列変化の傾きを大きくして劣化度を判定する。運行計画生成部(101)は、複数の設備について判定された劣化度に応じた各設備の検査要件を満たす運行計画を生成する。具体的には、運行計画生成部(101)は、判定された劣化度が高い設備ほど検査データの取得に要する時間を長く見込んで運行計画を生成する。
Description
本発明は、飛行体を用いた設備の検査業務を支援する技術に関する。
飛行体を用いた設備の検査業務を支援する技術として、特許文献1には、点検対象の風車におけるナセルの向き及びブレードの位相を示す回転情報を取得し、回転情報に基づいて、点検用のデータを取得する無人機の飛行ルート(点検ルート)のデータを生成する技術が開示されている。
特許文献1の技術のように飛行体を設備の周囲において飛行させて検査データ(設備の映像等)を取得する際に、劣化の進んだ設備を新しい設備と同じように検査すると、検査に利用するのに十分な品質の検査データが取得できない場合(例えば劣化箇所の詳細な画像が取得されていない場合など)がある。一方で、新しい設備を劣化の進んだ設備と同じように検査すると、どの設備も精緻な検査データを取得することになり、必要以上にコスト(人件費等)が生じる。
そこで、本発明は、劣化の進み具合が異なる複数の設備の検査データを取得する際の品質及びコストのバランスをとることを目的とする。
そこで、本発明は、劣化の進み具合が異なる複数の設備の検査データを取得する際の品質及びコストのバランスをとることを目的とする。
上記目的を達成するために、本発明は、検査対象の設備の立地条件に基づいて当該設備の劣化度を判定する判定部と、複数の前記設備から検査データを取得する飛行体を運行させる計画として、当該複数の設備について判定された前記劣化度に応じた各設備の検査要件を満たす運行計画を生成する生成部とを備える情報処理装置を提供する。
本発明によれば、劣化の進み具合が異なる複数の設備の検査データを取得する際の品質及びコストのバランスをとることができる。
1 実施例
図1は実施例に係る設備検査システム1の全体構成の一例を表す。設備検査システム1は、飛行体を用いた設備の検査業務を支援するシステムである。検査対象である設備は、例えば、橋梁、建物及びトンネル等であり、定期的に劣化の程度が検査され、必要であれば修繕が行われる。本実施例では、移動体通信の基地局が検査対象の設備である場合を説明する。
図1は実施例に係る設備検査システム1の全体構成の一例を表す。設備検査システム1は、飛行体を用いた設備の検査業務を支援するシステムである。検査対象である設備は、例えば、橋梁、建物及びトンネル等であり、定期的に劣化の程度が検査され、必要であれば修繕が行われる。本実施例では、移動体通信の基地局が検査対象の設備である場合を説明する。
検査対象の設備は、腐食、剥離、脱落、破断、ひび割れ、変形及び変色等が要因となって劣化する。設備の検査は、腐食等による劣化の程度(劣化度)及び修繕の要否を判断するためのデータである検査データを用いて行われる。検査データとは、例えば、赤外線センサの測定データ、超音波センサの測定データ及びミリ波センサの測定データ等である。本実施例では、撮影手段による撮影データ(静止画像又は動画像を示すデータ)が検査データとして用いられる。
検査データに基づく劣化度及び修繕の要否の判断は、主に検査担当者によって行われる。検査担当者は、表示された検査データを見て劣化度等を判断してもよいし、検査データをさらに分析する処理(画像処理等)をコンピュータに行わせてから劣化度等を判断してもよい。なお、判断の主体を人に限定する必要はなく、例えばAI(Artificial Intelligence)に劣化度等を判断させてもよい。
設備検査システム1は、ネットワーク2と、サーバ装置10と、ドローン20と、プロポ30と、拠点端末40とを備える。ネットワーク2は、移動体通信網及びインターネット等を含む通信システムであり、自システムにアクセスする装置同士のデータのやり取りを中継する。ネットワーク2には、サーバ装置10及び拠点端末40が有線通信で(無線通信でもよい)、ドローン20及びプロポ30が無線通信でアクセスしている。
ドローン20は、本実施例では、1以上の回転翼を回転させて飛行する回転翼機型の飛行体であり、周囲の映像を撮影する撮影機能を備えている。ドローン20は、操作者の操作に従って飛行し、検査データ(設備の撮影データ)を取得する。ドローン20は、検査会社の営業所等の拠点に配備されている。プロポ30(送信機)は、プロポーショナル式の制御(比例制御)を行う装置であり、操作者がドローン20の操作に用いる。
サーバ装置10は、検査対象の設備の劣化度を判定する処理及び判定した劣化度に基づいてドローン20の運行計画を生成する処理等を行う。サーバ装置10は本発明の「情報処理装置」の一例である。サーバ装置10が判定する劣化度と、検査担当者等が検査データに基づいて判断する劣化度とは、設備の劣化の程度を表すという点では共通しているが、判断材料及び活用方法等は異なっている。各劣化度の詳細は後程説明する。
サーバ装置10は、生成した運行計画を例えば拠点端末40に出力する。拠点端末40は、例えばドローン20が配備されている拠点に設置され、出力されてきた運行計画を表示して作業担当者に伝達する。作業担当者は、ドローン20を飛行させて検査データを取得する作業を行う担当者である。作業担当者は、伝達された運行計画に沿ってドローン20を持ち運び、計画された設備の周囲でドローン20を飛行させて検査データを取得する。
図2はサーバ装置10のハードウェア構成の一例を表す。サーバ装置10は、物理的には、プロセッサ11と、メモリ12と、ストレージ13と、通信装置14と、バス15などを含むコンピュータ装置として構成されてもよい。なお、以下の説明では、「装置」という文言は、回路、デバイス、ユニットなどに読み替えることができる。
また、各装置は、1つ又は複数含まれていてもよいし、一部の装置が含まれていなくてもよい。プロセッサ11は、例えば、オペレーティングシステムを動作させてコンピュータ全体を制御する。プロセッサ11は、周辺装置とのインターフェース、制御装置、演算装置、レジスタなどを含む中央処理装置(CPU:Central Processing Unit)によって構成されてもよい。
例えば、ベースバンド信号処理部等は、プロセッサ11によって実現されてもよい。また、プロセッサ11は、プログラム(プログラムコード)、ソフトウェアモジュール、データなどを、ストレージ13及び通信装置14の少なくとも一方からメモリ12に読み出し、読み出したプログラム等に従って各種の処理を実行する。プログラムとしては、上述の実施の形態において説明した動作の少なくとも一部をコンピュータに実行させるプログラムが用いられる。
上述の各種処理は、1つのプロセッサ11によって実行される旨を説明してきたが、2以上のプロセッサ11により同時又は逐次に実行されてもよい。プロセッサ11は、1以上のチップによって実装されてもよい。なお、プログラムは、電気通信回線を介してネットワークから送信されてもよい。メモリ12は、コンピュータ読み取り可能な記録媒体である。
メモリ12は、例えば、ROM(Read Only Memory)、EPROM(Erasable Programmable ROM)、EEPROM(Electrically Erasable Programmable ROM)、RAM(Random Access Memory)などの少なくとも1つによって構成されてもよい。メモリ12は、レジスタ、キャッシュ、メインメモリ(主記憶装置)などと呼ばれてもよい。メモリ12は、本開示の一実施の形態に係る無線通信方法を実施するために実行可能なプログラム(プログラムコード)、ソフトウェアモジュールなどを保存することができる。
ストレージ13は、コンピュータ読み取り可能な記録媒体であり、例えば、CD-ROM(Compact Disc ROM)などの光ディスク、ハードディスクドライブ、フレキシブルディスク、光磁気ディスク(例えば、コンパクトディスク、デジタル多用途ディスク、Blu-ray(登録商標)ディスク)、スマートカード、フラッシュメモリ(例えば、カード、スティック、キードライブ)、フロッピー(登録商標)ディスク、磁気ストリップなどの少なくとも1つによって構成されてもよい。
ストレージ13は、補助記憶装置と呼ばれてもよい。上述の記憶媒体は、例えば、メモリ12及びストレージ13の少なくとも一方を含むデータベース、サーバその他の適切な媒体であってもよい。通信装置14は、有線ネットワーク及び無線ネットワークの少なくとも一方を介してコンピュータ間の通信を行うためのハードウェア(送受信デバイス)である。通信装置14は、例えばネットワークデバイス、ネットワークコントローラ、ネットワークカード、通信モジュールなどともいう。
例えば、上述の送受信アンテナ、アンプ部、送受信部、伝送路インターフェースなどは、通信装置14によって実現されてもよい。送受信部は、送信部と受信部とで、物理的に、または論理的に分離された実装がなされてもよい。また、プロセッサ11、メモリ12などの各装置は、情報を通信するためのバス15によって接続される。バス15は、単一のバスを用いて構成されてもよいし、装置間ごとに異なるバスを用いて構成されてもよい。
図3はドローン20のハードウェア構成の一例を表す。ドローン20は、物理的には、プロセッサ21と、メモリ22と、ストレージ23と、通信装置24と、飛行装置25と、センサ装置26と、バッテリー27と、カメラ28と、バス29などを含むコンピュータ装置として構成されてもよい。プロセッサ21等の図2に同名のハードウェアが表されているものは、性能及び仕様等の違いはあるが図2と同種のハードウェアである。
通信装置24は、ネットワーク2との通信に加え、プロポ30との通信を行う機能(例えば2.4GHz帯の電波による無線通信機能)を有する。飛行装置25は、モータ及びローター等を備え、自機を飛行させる装置である。飛行装置25は、空中において、あらゆる方向に自機を移動させたり、自機を静止(ホバリング)させたりすることができる。
センサ装置26は、飛行制御に必要な情報を取得するセンサ群を有する装置である。センサ装置26は、例えば、自機の位置(緯度及び経度)を測定する位置センサと、自機が向いている方向(ドローンには自機の正面方向が定められており、定められた正面方向が向いている方向)を測定する方向センサと、自機の高度を測定する高度センサとを備える。
また、センサ装置26は、自機の速度を測定する速度センサと、3軸の角速度及び3方向の加速度を測定する慣性計測センサ(IMU(Inertial Measurement Unit))とを備える。バッテリー27は、電力を蓄積し、ドローン20の各部に電力を供給する装置である。カメラ28は、イメージセンサ及び光学系の部品等を備え、レンズが向いている方向にある物体を撮影する。
図4はプロポ30のハードウェア構成の一例を表す。プロポ30は、物理的には、プロセッサ31と、メモリ32と、ストレージ33と、通信装置34と、入力装置35と、出力装置36と、バス37などを含むコンピュータ装置として構成されてもよい。プロセッサ31等の図2に同名のハードウェアが表されているものは、性能及び仕様等の違いはあるが図2と同種のハードウェアである。
入力装置35は、外部からの入力を受け付ける入力デバイス(例えばスイッチ、ボタン及びセンサ等)である。特に、入力装置35は、左スティック351及び右スティック352を備え、各スティックへの操作をドローン20の前後方向、上下方向、左右方向、回転方向への移動操作として受け付ける。出力装置36は、外部への出力を実施する出力デバイス(例えばモニター361、スピーカー及びLED(Light Emitting Diode)ランプ等)である。なお、入力装置35及び出力装置36は、一体となった構成(例えばモニター361がタッチスクリーン)であってもよい。
図5は拠点端末40のハードウェア構成の一例を表す。拠点端末40は、物理的には、プロセッサ41と、メモリ42と、ストレージ43と、通信装置44と、入力装置45と、出力装置46と、バス47などを含むコンピュータ装置として構成されてもよい。プロセッサ41等の図2又は図4に同名のハードウェアが表されているものは、性能及び仕様等の違いはあるが図2又は図4と同種のハードウェアである。なお、入力装置45は、上記の入力デバイス以外にも、例えばキーボード、マウス及びマイクロフォン等であってもよい。
また、上記の各装置は、マイクロプロセッサ、デジタル信号プロセッサ(DSP:Digital Signal Processor)、ASIC(Application Specific Integrated Circuit)、PLD(Programmable Logic Device)、FPGA(Field Programmable Gate Array)などのハードウェアを含んで構成されてもよい。また、上記の各装置は、当該ハードウェアにより、各機能ブロックの一部又は全てが実現されてもよい。例えば、プロセッサ11は、当該ハードウェアの少なくとも1つを用いて実装されてもよい。
設備検査システム1が備える各装置における各機能は、各々のプロセッサ、メモリなどのハードウェア上に所定のソフトウェア(プログラム)を読み込ませることによって、プロセッサが演算を行い、各々の通信装置による通信を制御したり、メモリ及びストレージにおけるデータの読み出し及び書き込みの少なくとも一方を制御したりすることによって実現される。
図6は各装置が実現する機能構成を表す。サーバ装置10は、運行計画生成部101と、設備情報記憶部102と、劣化度判定部103と、立地条件取得部104とを備える。拠点端末40は、運行計画表示部401を備える。運行計画生成部101は、複数の検査対象の設備から検査データを取得するドローン20を運行させる運行計画を生成する。運行計画生成部101は本発明の「生成部」の一例である。
運行計画とは、例えば、ドローン20の移動(人手による移動を含む)、飛行及び撮影を行う時間及び場所等を示す計画である。運行計画生成部101は、検査対象の設備に関する設備情報及び各設備について判定された劣化度に基づいて運行計画を生成する。設備情報は設備情報記憶部102が記憶しており、劣化度は劣化度判定部103によって判定される。
設備情報記憶部102は、設備情報を記憶する機能である。
図7は記憶された設備情報の一例を表す。図7の例では、設備情報記憶部102は、設備名と、設備位置(例えば緯度及び経度)と、基準検査時間と、設立時期と、最新検査日とを対応付けた設備情報を記憶している。基準検査時間とは、設備の検査データを取得する際に要する標準的な時間である。基準検査時間には、ドローン20を飛行させる準備及び片付け等の時間も含まれており、設備がある場所での滞在時間と等しいものとする。
図7は記憶された設備情報の一例を表す。図7の例では、設備情報記憶部102は、設備名と、設備位置(例えば緯度及び経度)と、基準検査時間と、設立時期と、最新検査日とを対応付けた設備情報を記憶している。基準検査時間とは、設備の検査データを取得する際に要する標準的な時間である。基準検査時間には、ドローン20を飛行させる準備及び片付け等の時間も含まれており、設備がある場所での滞在時間と等しいものとする。
基準検査時間は、検査データを取得する際にドローン20を飛行させる経路が長いほど長くなる。基地局毎に検査データを取得する方向及びドローン20を上昇させる高さ等に応じたドローン20の飛行経路が決まっているので、決められた飛行経路の長さに応じて基準検査時間も定められる。基準検査時間を含む設備情報は、例えば設備に関係する事業者によって入力されて設備情報記憶部102に記憶される。設備情報記憶部102は、常に最新の設備情報を記憶しているものとする。
劣化度判定部103は、検査対象の設備の立地条件に基づいてその設備の劣化度を判定する。劣化度判定部103は本発明の「判定部」の一例である。劣化度判定部103は、詳細には、設備の劣化の進み具合に影響する立地条件を用いて判定を行う。本実施例では、劣化度判定部103は、設備の劣化の原因成分を空気中に含む場所からの距離を立地条件として用いる。
劣化の原因成分とは、例えば、海塩粒子又は化学物質等である。海塩粒子は海から飛来し、化学物質は工場から飛来する。従って、原因成分を空気中に含む場所とは、海又は工場等である。本実施例では、劣化度判定部103は、設備と海との距離を立地条件として用いる。本実施例では、単純に設備から最も近い海岸線とその設備との距離が設備と海との距離として用いられる。
運行計画生成部101は、例えば毎年年初に1年間の運行計画を生成する。本実施例では、いずれの基地局も5年毎に検査が行われるものとする。運行計画生成部101は、設備情報記憶部102から最新検査日が5年前の年になっている設備情報を読み出す。現在を2019年とすると、図7の例であれば、基地局α、β、γの設備情報は、最新検査日がいずれも5年前の2014年になっているため読み出される。
運行計画生成部101は、設備情報を読み出した設備、すなわち検査対象の設備の劣化度の判定を劣化度判定部103に要求する。劣化度判定部103は、劣化度の判定を要求された設備の立地条件を立地条件取得部104に要求する。立地条件取得部104は、要求された検査対象の設備の立地条件を取得する。立地条件取得部104は、検査対象の設備の位置情報を設備情報記憶部102から読み出す。
立地条件取得部104は、海岸線の位置を緯度及び経度で示した地図データを予め記憶しておく。立地条件取得部104は、各検査対象の設備について読み出した位置情報に基づき、各設備と最寄りの海岸線との距離を算出し、算出した距離の値を立地条件として取得する。立地条件取得部104は、取得した各検査対象の設備の立地条件を劣化度判定部103に供給する。
劣化度判定部103は、基本的には、設備の設立から経過した期間(以下では単に「経過期間」と言う)が長いほど劣化度が大きいと判定する。劣化度判定部103は、経過期間と劣化度との関係式を記憶している。
図8は経過期間と劣化度との関係式の一例を表す。図8では、横軸が経過期間(単位は「年」)で縦軸が劣化度(「低」、「中」及び「大」)を示すグラフが表されている。
図8は経過期間と劣化度との関係式の一例を表す。図8では、横軸が経過期間(単位は「年」)で縦軸が劣化度(「低」、「中」及び「大」)を示すグラフが表されている。
図8のグラフには、経過期間と劣化度との関係式B1、B2、B3が表されている。各関係式の傾きはB1<B2<B3という関係になっている。例えば関係式B1だと約23年経過したときに劣化度が「高」になるが、関係式B2だと約18年経過しただけで、関係式B3だと約13年経過しただけで劣化度が「高」になっている。劣化度判定部103は、検査対象の設備の立地条件に応じて判定に用いる関係式を決定する。
各関係式は、劣化度の時系列変化を表している。なお、図8の例では、劣化度の時系列変化が直線的に(つまり一次関数で)表されているが、曲線を含む関係式で表されてもよい。各関係式は、例えば過去に観察された設備の劣化の進み方又は設備を構成する物体(コンクリート、鉄及びビニール等)の物性等に基づいて決定される。いずれの場合も、時間の経過と共に劣化度は必ず増加する(修繕等がない限り劣化度が減少することはない)。
劣化度判定部103は、立地条件と関係式とを対応付けた関係式テーブルを用いて関係式を決定する。
図9は関係式テーブルの一例を表す。図9の例では、「Th11未満」、「Th11以上Th12未満」及び「Th12以上」という立地条件に、「B3」、「B2」及び「B1」という関係式が対応付けられている。立地条件の値は、上述した検査対象の設備と海との距離を意味している。
図9は関係式テーブルの一例を表す。図9の例では、「Th11未満」、「Th11以上Th12未満」及び「Th12以上」という立地条件に、「B3」、「B2」及び「B1」という関係式が対応付けられている。立地条件の値は、上述した検査対象の設備と海との距離を意味している。
劣化度判定部103は、立地条件取得部104から供給された各検査対象の設備の立地条件に基づき、各設備について用いる関係式を決定する。劣化度判定部103は、例えば基地局αと海との距離が「Th11以上Th12未満」であれば関係式B2を用いると決定し、基地局βと海との距離が「Th11未満」であれば関係式B3を用いると決定する。
劣化度判定部103は、各検査対象の設備の設立時期を設備情報記憶部102から読み出し、読み出した設立時期から現在までの経過期間を算出する。劣化度判定部103は、各設備について算出した経過期間を決定した関係式に代入することで、各設備の劣化度を判定する。劣化度判定部103は、基地局αであれば、経過期間が15年で立地条件から関係式B2を用いると決定しているので、劣化度を「中」と判定する。
また、劣化度判定部103は、基地局βであれば、経過期間が基地局αと同じ15年であるが、立地条件から関係式B3を用いると決定しているので、劣化度を「高」と判定する。また、劣化度判定部103は、例えば経過期間が20年で関係式がB1であれば劣化度を「中」と判定するが、同じ経過期間が20年であっても関係式がB2(つまり海との距離がより近い設備)であれば劣化度を「高」と判定する。
以上のとおり、劣化度判定部103は、検査対象の設備の劣化の原因成分を空気中に含む場所(本実施例では「海」)に近い設備ほど劣化度の時系列変化の傾きを大きくして劣化度を判定する。劣化度判定部103は、各検査対象の設備についての判定結果を運行計画生成部101に供給する。運行計画生成部101は、供給された判定結果、すなわち、複数の設備について判定された劣化度に応じた各設備の検査要件を満たす運行計画を生成する。
各設備の検査要件とは、例えば、ドローン20の拠点から設備までの移動時間を確保するという要件である。また、検査要件には、検査に要する時間を各設備での滞在時間として確保するという要件も含まれる。運行計画生成部101は、検査に要する時間(滞在時間)として最低でも上述した基準検査時間を確保するが、設備の劣化度によっては、基準検査時間よりも長い時間を確保する。
具体的には、運行計画生成部101は、劣化度判定部103により判定された劣化度が高い設備ほど検査データの取得に要する時間を長く見込んで運行計画を生成する。運行計画生成部101は、劣化度と検査時間係数とを対応付けた係数テーブルを用いて運行計画を生成する。検査時間係数とは、基準検査時間に乗じることで実際の検査に要すると見込まれる時間を求めるための係数のことである。
図10は係数テーブルの一例を表す。図10の例では、「低」、「中」及び「高」という劣化度に、「1.0」、「1.2」及び「1.4」という検査時間係数が対応付けられている。運行計画生成部101は、判定された劣化度が「低」である設備については、検査時間係数が「1.0」なので、基準検査時間をそのまま設備での検査に要する時間、すなわち滞在時間として用いて運行計画を生成する。
運行計画生成部101は、判定された劣化度が「中」である設備については基準検査時間を1.2倍した時間を設備での滞在時間として用いて運行計画を生成する。また、運行計画生成部101は、判定された劣化度が「高」である設備については基準検査時間を1.4倍した時間を設備での滞在時間として用いて運行計画を生成する。運行計画生成部101は、取得した設備情報が示す各基地局の位置に基づいて、ドローン20の拠点から各設備までの移動時間と、設備間の移動時間を算出する。
運行計画生成部101は、例えば移動経路となる道路に沿った距離を、信号等を考慮して平均時速30kmで走行した場合に要する時間を移動時間として算出する。運行計画生成部101は、算出した移動時間と上記のとおり定めた各設備における滞在時間とに基づき、ドローン20の拠点から出発して各基地局を回った上で所定の時刻までに拠点への到着が可能な基地局の組合せ及び検査する基地局の順番を特定する。
運行計画生成部101は、基地局の組合せ及び順番を特定すると、検査が行われる予定の日付と特定した組合せ及び順番とを対応付けた運行計画を生成する。運行計画生成部101は、検査が行われる予定の日付毎に基地局の組合せ及び順番の特定と運行計画データの生成を繰り返し行い、検査対象の基地局がなくなるまで運行計画の生成を続ける。運行計画生成部101は、生成した運行計画を例えば拠点端末40に送信する。拠点端末40の運行計画表示部401は、サーバ装置10から送信されてきた運行計画を表示する。
図11は表示された運行計画の一例を表す。図11の例では、運行計画表示部401は、検査日と、検査対象の設備とを対応付けた一覧を表示している。検査対象の設備は、検査する順番に並べて表示されている。検査作業の担当者は、表示された運行計画を見て、検査作業を実施する。なお、図11の例では、設備の順番しか表されていないが、運行計画生成部101は、拠点と設備との間の移動時間、設備間の移動時間及び各設備での滞在時間等を表す運行計画を生成してもよい。
設備検査システム1が備える各装置は、上記の構成に基づいて、各設備について判定された劣化度に基づいて運行計画を生成する生成処理を行う。
図12は生成処理における各装置の動作手順の一例を表す。図12の動作手順は、例えば、拠点の運行管理の担当者が拠点端末40に対して運行計画を表示させる操作を行うことを契機に開始される。
図12は生成処理における各装置の動作手順の一例を表す。図12の動作手順は、例えば、拠点の運行管理の担当者が拠点端末40に対して運行計画を表示させる操作を行うことを契機に開始される。
まず、サーバ装置10(運行計画生成部101)は、運行計画の要求を受け付けると(ステップS11)、検査対象の設備の設備情報を読み出すことで、検査対象の設備を選択する(ステップS12)。次に、サーバ装置10(立地条件取得部104)は、選択された設備の立地条件を取得する(ステップS13)。続いて、サーバ装置10(劣化度判定部103)は、取得された立地条件に基づいて、検査対象の設備の劣化度を判定する(ステップS14)。
次に、サーバ装置10(運行計画生成部101)は、判定された劣化度に基づいて各設備における検査に要する時間(すなわち滞在時間)を算出する(ステップS15)。続いて、サーバ装置10(運行計画生成部101)は、運行計画を生成する対象となる検査日を決定し(ステップS21)、決定した検査日に検査を行う設備の組合せと検査の順番とを、各設備の位置及び算出した滞在時間等に基づき特定する(ステップS22)。
次に、サーバ装置10(運行計画生成部101)は、特定した設備の組合せ及び順番に基づいて運行計画を生成する(ステップS23)。そして、サーバ装置10(運行計画生成部101)は、全ての設備について運行計画の生成が完了したか否かを判断する(ステップS24)。サーバ装置10は、完了していない(NO)と判断した場合はステップS21に戻って動作を行い、完了した(YES)と判断した場合は図12の動作手順を終了する。
基地局のような設備は設立から経過した期間が長いほど劣化が進むが、立地条件によって劣化の進み方が変化する。劣化の進んだ設備は高品質な検査データを用いて点検することが望ましいが、検査データの品質が高いほどコストも高くなる。ここでいう品質とは、例えば検査データが撮影データであれば画像の枚数、画像の解像度及び撮影箇所のアングルの数等によって表される。
また、検査データを取得するためのコストは、検査担当者の人件費、ドローン20の初期費用及びメンテナンス費用等である。一派的には、検査データの品質を高めるほど、検査に時間を要するようになったり、高価なドローンやカメラが必要になったりして、検査データを取得するためのコストが増加する。そのため、劣化が進んでいない設備まで高品質な検査データを取得すると、必要以上にコストが高くなる。
本実施例では、上記のとおり設備の劣化度に応じて滞在時間、すなわち検査に要する時間を変化させて運行計画が生成されている。これにより、劣化が進んだ設備の検査データの品質を劣化が進んでいない設備の検査データの品質よりも高くすることができる。その結果、劣化の進み具合が異なる複数の設備の検査データを取得する際の品質及びコストのバランスをとることができる。
また、本実施例では、劣化度が高いほど滞在時間を長くすることで、検査に用いるドローン20は変えなくても、例えば撮影枚数を増やしたり撮影アングルを増やしたりすることができ、検査データの品質を高めることができる。また、本実施例では、設備の劣化の原因成分を空気中に含む場所(例えば海)との距離に応じて劣化度が判定された。これにより、劣化の原因成分による劣化への影響を考慮しない場合に比べて、劣化度の判定精度を高めることができる。
2 変形例
上述した実施例は本発明の実施の一例に過ぎず、以下のように変形させてもよい。また、実施例及び各変形例は必要に応じてそれぞれ組み合わせてもよい。実施例及び各変形例を組み合わせる際は、各変形例について優先順位を付けて(各変形例を実施すると競合する事象が生じる場合にどちらを優先するかを決める順位付けをして)実施してもよい。
上述した実施例は本発明の実施の一例に過ぎず、以下のように変形させてもよい。また、実施例及び各変形例は必要に応じてそれぞれ組み合わせてもよい。実施例及び各変形例を組み合わせる際は、各変形例について優先順位を付けて(各変形例を実施すると競合する事象が生じる場合にどちらを優先するかを決める順位付けをして)実施してもよい。
また、具体的な組み合わせ方法として、例えば共通する指標(例えば劣化度)を求めるために異なるパラメータを用いる変形例を組み合わせて、各パラメータを共に用いて共通する指標が求められてもよい。また、個別に求めた指標を何らかの規則に従い統合して1つの指標が求められてもよい。また、共通する指標を求める際に、用いられるパラメータ毎に異なる重み付けがされてもよい。
2-1 移動時間
運行計画の生成方法が実施例と異なっていてもよい。本変形例では、運行計画生成部101が、劣化度判定部103により判定された劣化度が高い設備ほどその設備の前後の移動時間を長く見込んで運行計画を生成する。運行計画生成部101は、劣化度と移動時間係数とを対応付けた係数テーブルを用いて運行計画を生成する。
運行計画の生成方法が実施例と異なっていてもよい。本変形例では、運行計画生成部101が、劣化度判定部103により判定された劣化度が高い設備ほどその設備の前後の移動時間を長く見込んで運行計画を生成する。運行計画生成部101は、劣化度と移動時間係数とを対応付けた係数テーブルを用いて運行計画を生成する。
運行計画生成部101は、例えば実施例と同じ方法で算出した移動時間を、基準となる移動時間として定める。移動時間係数とは、基準となる移動時間に乗じる係数であり、実際の検査において確保すべき移動時間を求めるために定められる。
図13は本変形例の係数テーブルの一例を表す。図13の例では、「低」、「中」及び「高」という劣化度に、「1.0」、「1.2」及び「1.4」という移動時間係数が対応付けられている。
図13は本変形例の係数テーブルの一例を表す。図13の例では、「低」、「中」及び「高」という劣化度に、「1.0」、「1.2」及び「1.4」という移動時間係数が対応付けられている。
運行計画生成部101は、判定された劣化度が「低」である設備については、移動時間係数が「1.0」なので、設備の前後の基準となる移動時間をそのまま用いて運行計画を生成する。運行計画生成部101は、判定された劣化度が「中」である設備については、設備の前後の基準となる移動時間を1.2倍して運行計画を生成する。また、運行計画生成部101は、判定された劣化度が「高」である設備については、設備の前後の基準となる移動時間を1.4倍して運行計画を生成する。
また、運行計画生成部101は、劣化度が異なる設備を順番に検査する場合は、設備間の移動時間のうち長い方を採用して運行計画を生成する。例えば、運行計画生成部101は、劣化度が「低」の設備から劣化度が「高」の設備に移動する場合の移動時間として、基準となる移動時間の1.4倍を採用する。本変形例では、以上のとおり移動時間を確保することで、劣化度が高い設備ほど余裕のある移動時間にして確実に検査を行うことができる。
2-2 検査時期
運行計画の生成方法が上記の各例と異なっていてもよい。本変形例では、運行計画生成部101が、劣化度判定部103により判定された劣化度が高い設備ほど検査データの取得時期を早くする運行計画を生成する。運行計画生成部101は、劣化度と検査時期の優先度とを対応付けた優先度テーブルを用いて運行計画を生成する。
運行計画の生成方法が上記の各例と異なっていてもよい。本変形例では、運行計画生成部101が、劣化度判定部103により判定された劣化度が高い設備ほど検査データの取得時期を早くする運行計画を生成する。運行計画生成部101は、劣化度と検査時期の優先度とを対応付けた優先度テーブルを用いて運行計画を生成する。
図14は優先度テーブルの一例を表す。図14の例では、「低」、「中」及び「高」という劣化度に、「低」、「中」及び「高」という検査時期の優先度が対応付けられている。本変形例でも、運行計画生成部101は、実施例で述べたように1年間の運行計画を生成するものとする。運行計画生成部101は、例えば1年間を3つの時期(前期:1~4月、中期:5~8月、後期:9~12月)に分割する。
運行計画生成部101は、判定された劣化度が「低」である設備については、優先度が「低」なので、後期に検査を行う運行計画を生成する。同様に、運行計画生成部101は、判定された劣化度が「中」である設備は中期に検査し、判定された劣化度が「高」である設備は前期に検査する運行計画を生成する。本変形例では、以上のとおり劣化度が高い設備の検査データの取得時期を早めることで、劣化度を考慮せずに取得時期を決める場合に比べて、設備の検査が間に合わなくて障害が発生するとういう事態を少なくすることができる。
2-3 検査周期
運行計画の生成方法が上記の各例と異なっていてもよい。本変形例では、運行計画生成部101が、劣化度判定部103により判定された劣化度が高い設備ほど検査データを取得する周期を短くする運行計画を生成する。運行計画生成部101は、劣化度と取得周期とを対応付けた周期テーブルを用いて運行計画を生成する。
運行計画の生成方法が上記の各例と異なっていてもよい。本変形例では、運行計画生成部101が、劣化度判定部103により判定された劣化度が高い設備ほど検査データを取得する周期を短くする運行計画を生成する。運行計画生成部101は、劣化度と取得周期とを対応付けた周期テーブルを用いて運行計画を生成する。
図15は周期テーブルの一例を表す。図15の例では、「低」、「中」及び「高」という劣化度に、「5年」、「4年」及び「3年」という取得周期が対応付けられている。本変形例でも、運行計画生成部101は、実施例で述べたように毎年年初に1年間の運行計画を生成するものとする。但し、運行計画生成部101は、実施例と異なり、検査対象の設備の設備情報を読み出す前に、全ての設備の劣化度を劣化度判定部103に要求する。
劣化度判定部103は、要求された全ての設備の劣化度を判定し、判定結果を運行計画生成部101に供給する。運行計画生成部101は、劣化度が「低」の設備については、最新検査日が5年前である場合に検査対象として運行計画を生成する。また、運行計画生成部101は、劣化度が「中」の設備については、最新検査日が4年前である場合に検査対象として運行計画を生成する。
また、運行計画生成部101は、劣化度が「高」の設備については、最新検査日が3年前である場合に検査対象として運行計画を生成する。本変形例では、以上のとおり劣化度が高い設備ほど検査データの取得周期を短くすることで、劣化度を考慮せずに検査対象を決める場合に比べて、設備の検査が間に合わなくて障害が発生するとういう事態を少なくすることができる。
2-4 撮影条件
運行計画の生成方法が上記の各例と異なっていてもよい。ドローン20が取得する検査データとしては、例えば実施例で述べたように設備を撮影した画像データが用いられる。画像データとは、静止画像のデータでもよいし、動画像のデータでもよい。本変形例では、運行計画生成部101は、劣化度判定部103により判定された劣化度が高い設備ほど撮影条件が良好な日に検査データを取得する運行計画を生成する。
運行計画の生成方法が上記の各例と異なっていてもよい。ドローン20が取得する検査データとしては、例えば実施例で述べたように設備を撮影した画像データが用いられる。画像データとは、静止画像のデータでもよいし、動画像のデータでもよい。本変形例では、運行計画生成部101は、劣化度判定部103により判定された劣化度が高い設備ほど撮影条件が良好な日に検査データを取得する運行計画を生成する。
撮影条件は、例えば、光量が多く且つ影ができにくいほど良好と言える。光量は、日が高いほど多くなるので、正午に近い時間ほど多くなり、また、夏至に近く日照時間が長い時期ほど多くなる。また、影については、正午に近いほど短くなり、また、快晴よりも少し曇っている方ができにくい。例えば夏の日中で光量が十分にある状況であれば、少し曇っている方が撮影条件が良好になる場合もある。
また、ドローン20を飛行させながら撮影するので、風が弱い方が飛行中の機体が安定し、撮影条件が良好と言える。また、雨が降れば撮影条件は当然ながら悪くなる。撮影条件として日の高さだけを考慮する場合には、運行計画生成部101は、検査日の日付と検査する時間帯とに応じて撮影条件を特定する。この場合、運行計画生成部101は、例えば1年間の運行計画を生成する。
一方、撮影条件として気象状況を考慮する場合、運行計画生成部101は、例えば梅雨の時期は撮影条件が悪く、夏は撮影条件が良いというように、年間を通して各季節の撮影条件の傾向を用いて運行計画を生成してもよい。また、運行計画生成部101は、天気予報を利用して撮影条件を特定してもよい。その場合、運行計画生成部101は、例えば、検査対象の設備の位置を含む地域における天気予報の情報を天気予報サービス等の提供事業者のシステムから取得し、天気予報に含まれる風速及び降水量を取得する。
運行計画生成部101は、風速及び降水量と撮影条件とを対応付けた撮影条件テーブルを用いて各検査日の撮影条件を特定する。
図16A及び16Bは撮影条件テーブルの一例を表す。図16Aの例では「Th21未満」、「Th21以上Th22未満」及び「Th22以上」という風速に、「良」、「可」及び「不良」という撮影条件が対応付けられている。
図16A及び16Bは撮影条件テーブルの一例を表す。図16Aの例では「Th21未満」、「Th21以上Th22未満」及び「Th22以上」という風速に、「良」、「可」及び「不良」という撮影条件が対応付けられている。
図16Bの例では「Th31未満」、「Th31以上Th32未満」及び「Th32以上」という降水量に、「良」、「可」及び「不良」という撮影条件が対応付けられている。運行計画生成部101は、1週間の各検査日について予報された風速及び降水量に対応付けられた撮影条件のうちの悪い方を(例えば「良」と「可」であれば「可」を)、検査日当日の撮影条件として特定する。
なお、運行計画生成部101は、日の高さによる撮影条件と気象状況による撮影条件とを両方用いて撮影条件を特定してもよい。その場合も、運行計画生成部101は、各撮影条件のうち悪い方の撮影条件を検査日当日の撮影条件として特定する。運行計画生成部101は、劣化度と撮影条件の優先度とを対応付けた優先度テーブルを用いて運行計画を生成する。
図17は本変形例の優先度テーブルの一例を表す。図16A及び16Bの例では、「低」、「中」及び「高」という劣化度に、「低」、「中」及び「高」という撮影条件の優先度が対応付けられている。運行計画生成部101は、判定された劣化度に基づいて、各設備の撮影条件の優先度を特定する。運行計画生成部101は、1週間の各検査日のうち、撮影条件が「良」の検査日については、特定した撮影条件の優先度が「高」の設備を選んで運行計画を生成する。
運行計画生成部101は、撮影条件が「可」の検査日については、特定した撮影条件の優先度が「中」の設備を選んで運行計画を生成し、撮影条件が「不良」の検査日については、特定した撮影条件の優先度が「低」の設備を選んで運行計画を生成する。なお、運行計画生成部101は、撮影条件が「不良」の検査日については検査を行わない運行計画を生成してもよい。
また、運行計画生成部101は、撮影条件を時間帯毎に特定して運行計画を生成してもよい。その場合、運行計画生成部101は、例えば撮影条件が「良」の時間帯には特定した撮影条件の優先度が「高」の設備で検査を行い、撮影条件が「可」の時間帯には特定した撮影条件の優先度が「中」の設備で検査を行う運行計画を生成する。本変形例では、以上のとおり劣化度が高い設備ほど検査時の撮影条件を良くすることで、撮影条件を考慮しない場合に比べて、設備の画像の不明瞭さにより劣化の進んだ設備の補修の遅れが生じるという事態を少なくすることができる。
2-5 劣化事象に基づく判定
劣化度の判定方法が実施例と異なっていてもよい。本変形例では、劣化度判定部103が、設備の劣化の原因となる事象(以下「劣化事象」という)に基づいて劣化度を判定する。詳細には、劣化度判定部103は、劣化事象の発生状況に応じて劣化度の判定条件を変えて設備の劣化度を判定する。判定条件とは、例えば、図8の関係式に表されるような劣化度の時系列変化の傾き(劣化度が単位期間に増加する度合い)である。
劣化度の判定方法が実施例と異なっていてもよい。本変形例では、劣化度判定部103が、設備の劣化の原因となる事象(以下「劣化事象」という)に基づいて劣化度を判定する。詳細には、劣化度判定部103は、劣化事象の発生状況に応じて劣化度の判定条件を変えて設備の劣化度を判定する。判定条件とは、例えば、図8の関係式に表されるような劣化度の時系列変化の傾き(劣化度が単位期間に増加する度合い)である。
劣化事象とは、例えば雷、雪、暴風又は凍結等の特定の気象状況である。雷が多発するほど電気部品が故障しやすく、降雪量が多いほど雪の重さによる断線及び変形等が起こりやすい。また、暴風による直接的な負荷又は倒木等の衝撃により設備が破損する場合があるし、凍結が繰り返されると設備に用いられているコンクリートのひび割れの原因になる。なお、営巣及び糞等の鳥害も、電気部品の故障又は金属の腐食等の劣化を進行させることがあるため、劣化事象に含められる。
例えば、劣化事象が他の地域に比べて多く発生する地域があったとする。以下では、劣化事象の発生件数が一般的な地域を「通常地域」と言い、通常地域よりも劣化事象が多く発生する地域を「多発地域」と言う。劣化度判定部103は、多発地域の設備は通常地域の設備に比べて劣化度の時系列変化の傾きを大きくして劣化度を判定する。劣化度判定部103は、例えば特殊な気象状況が劣化事象である場合は、予め過去の各地の気象データ(雷日数、積雪量、1日の最大雨量及び最大風速等を示すデータ)を記憶しておく。
劣化度判定部103は、検査対象の設備を含む地域の気象データを参照し、多発地域及び通常地域のいずれであるかを判断する。劣化度判定部103は、例えば、雷日数、積雪量、最大風速及び最低気温が0度未満の日数のうち、各々について定められた閾値以上となるものが1つでもある地域を多発地域として特定する。なお、劣化度判定部103は、2以上の気象状況が閾値以上である場合に多発地域を特定してもよい。
また、劣化度判定部103は、鳥害の発生件数を地域毎に集計したデータを記憶していれば、鳥害も含めて多発地域を特定してもよい。多発地域を特定すると、劣化度判定部103は、例えば、通常地域の設備の劣化度は図8に表す関係式B1を用いて判定し、多発地域の設備の劣化度は図8に表す関係式B2(B1よりも時系列変化の傾きが大きく劣化度が高くなりやすい関係式)を用いて判定する。
本変形例では、以上のとおり劣化事象の発生件数に基づいて劣化度を判定することで、劣化事象による劣化への影響を考慮しない場合に比べて、劣化度の判定精度を高めることができる。なお、劣化度判定部103は、多発地域の中でも、例えば1つの劣化事象が閾値以上となる地域については関係式B2を用いて判定し、2以上の劣化事象が閾値以上となる地域については関係式B3(B2よりも時系列変化の傾きが大きく劣化度が高くなりやすい関係式)を用いるというように、段階的に劣化度を判定してもよい。劣化度の段階を多くするほど、より精密な劣化度を判定することができる。
2-6 劣化度の判定方法
劣化度の判定方法が実施例と異なっていてもよい。例えば、劣化度判定部103は、実施例では海からの距離を立地条件として用いたが、海と同じく設備の劣化の原因成分を空気中に含む場所の一例である工場からの距離を立地条件として用いてもよい。また、劣化度判定部103は、複数の種類の立地条件に基づいて劣化度を判定してもよい。
劣化度の判定方法が実施例と異なっていてもよい。例えば、劣化度判定部103は、実施例では海からの距離を立地条件として用いたが、海と同じく設備の劣化の原因成分を空気中に含む場所の一例である工場からの距離を立地条件として用いてもよい。また、劣化度判定部103は、複数の種類の立地条件に基づいて劣化度を判定してもよい。
その場合、劣化度判定部103は、例えば、2以上の立地条件に基づいて上記の各例と同様に関係式をそれぞれ特定し、特定した関係式のうち最も劣化度の時系列変化の傾きが大きいものを用いて劣化度を判定する。なお、劣化度判定部103は、各立地条件を表す数値(海からの距離、雷の発生件数、降雪量等)を正規化し、正規化した数値の代表値(平均値、中央値又は最大値等)を関係式に対応付けた関係式テーブルを用いて劣化度を判定してもよい。
また、劣化度判定部103は、正規化した値に重み係数を乗じることで、各立地条件に重み付けをした上で劣化度を判定してもよい(重みを重くしたい立地条件の値には大きな重み係数を乗じる)。例えば工場の原因成分に比べて海の原因成分の方が劣化への影響が大きい場合には、劣化度判定部103は、工場からの距離に比べて海からの距離の方に重みを付けて劣化度を判定する。重み付けを行うと、重み付けを行わない場合に比べて、劣化度の精度を高めることができる。
2-7 構成物毎の判定
劣化度の判定方法が実施例と異なっていてもよい。設備には、劣化の進み方が異なる複数の構成物が含まれている場合がある。例えば基地局のアンテナ設備であれば、コンクリートの土台、金属の鉄塔及び電気設備が構成物として含まれている。本変形例では、劣化度判定部103が、設備の構成物毎に劣化度の判定条件(例えば上述した劣化度の時系列変化の傾き)を異ならせた上で、構成物毎に劣化度を判定する。
劣化度の判定方法が実施例と異なっていてもよい。設備には、劣化の進み方が異なる複数の構成物が含まれている場合がある。例えば基地局のアンテナ設備であれば、コンクリートの土台、金属の鉄塔及び電気設備が構成物として含まれている。本変形例では、劣化度判定部103が、設備の構成物毎に劣化度の判定条件(例えば上述した劣化度の時系列変化の傾き)を異ならせた上で、構成物毎に劣化度を判定する。
劣化度判定部103は、図9に表すような関係式テーブルを構成物毎に用意して、構成物毎に劣化度を判定する。
図18A~18Cは本変形例の関係式テーブルの一例を表す。図18Aでは、「Th41未満」、「Th41以上Th42未満」及び「Th42以上」という立地条件(最低気温が0度未満の日数)に、「B1」、「B2」及び「B3」という図8に表す関係式が対応付けられている。
図18A~18Cは本変形例の関係式テーブルの一例を表す。図18Aでは、「Th41未満」、「Th41以上Th42未満」及び「Th42以上」という立地条件(最低気温が0度未満の日数)に、「B1」、「B2」及び「B3」という図8に表す関係式が対応付けられている。
図18Bでは、「Th51未満」、「Th51以上Th52未満」及び「Th52以上」という立地条件(海からの距離)に、「B3」、「B2」及び「B1」という関係式が対応付けられている。図18Cでは、「Th61未満」、「Th61以上Th62未満」及び「Th62以上」という立地条件(雷発生件数)に、「B1」、「B2」及び「B3」という関係式が対応付けられている。
劣化度判定部103は、各設備について、図18A~18Cの3つの関係式テーブルを用いることで、土台、鉄塔及び電気設備の各構成物についての劣化度を、各構成物の劣化に最も影響する立地条件に基づいて判定する。なお、劣化度判定部103は、構成物の劣化に最も影響する立地条件だけに基づくのではなく、各構成物について2以上の立地条件に基づいて劣化度を判定してもよい。
その場合、劣化度判定部103は、各構成物の劣化に最も影響する立地条件に重みを付けて劣化度を判定してもよい。重み付けの方法としては、例えば、劣化に最も影響する立地条件の関係式テーブルに表されている閾値をより傾きの大きい関係式が対応付けられるように変更する方法又は劣化に最も影響する立地条件に対応付けられている関係式の傾きを他の立地条件に対応付けられている関係式の傾きよりも大きくする方法等が用いられればよい。
運行計画生成部101は、劣化度判定部103により判定された構成物毎の劣化度の代表値を、代表値が算出された構成物を有する設備の劣化度として用いて運行計画を生成する。代表値とは、例えば、各構成物の劣化度を数値で表した場合の平均値、中央値又は最大値等である。運行計画生成部101は、例えば、劣化度「低」=「1」、「中」=「2」、「高」=「3」というように数値で表す。
基地局αの構成物毎の劣化度が土台は1、鉄塔は2、電気設備は2であった場合、運行計画生成部101は、(1+2+2)÷3=1.67(切り上げ)という数値を基地局αの劣化度として算出する。運行計画生成部101は、例えば算出した数値を再度「低」、「中」、「高」という劣化度に戻してから(1.5未満は「低」、1.5以上2.5未満は「中」、2.5以上は「高」という具合)、上記の各例と同様に運行計画を生成する。
なお、運行計画生成部101は、算出した値をそのまま用いて運行計画を生成してもよい。その場合、劣化度は1から3までの数値で表されるので、運行計画生成部101は、例えば実施例のように検査に要する時間を変動させる場合、算出した劣化度を図10に表す検査時間係数に近い値に換算してから運行計画を生成すればよい。また、最初から検査時間係数に近い値が劣化度として算出されるように、劣化度の数値を表しておいてもよい(図10の例であれば劣化度「低」=「1.0」、「中」=「1.2」、「高」=「1.4」という具合)。
本変形例の判定方法を用いると、例えば一部の構成物の劣化が著しく進んだ設備があった場合に、構成物毎の劣化度を判定しない場合に比べて、設備全体の劣化度も高く判定されやすくなる。これにより、構成物毎の劣化度を判定しない場合に比べて、劣化が著しく進んだ構成物の補修が間に合わずに障害が発生するとういう事態を少なくすることができる。
2-8 劣化種類毎の判定
劣化度の判定方法が上記の各例と異なっていてもよい。設備の劣化には、腐食、剥離、脱落、破断、ひび割れ、変形及び変色等の種類があるが、それぞれ立地条件から受ける影響の大きさが異なっている。例えば腐食(錆を含む)は海からの距離の影響を大きく受け、変色は工場からの距離の影響を大きく受ける。
劣化度の判定方法が上記の各例と異なっていてもよい。設備の劣化には、腐食、剥離、脱落、破断、ひび割れ、変形及び変色等の種類があるが、それぞれ立地条件から受ける影響の大きさが異なっている。例えば腐食(錆を含む)は海からの距離の影響を大きく受け、変色は工場からの距離の影響を大きく受ける。
また、変形は雪の影響を大きく受け、ひび割れは凍結の影響を大きく受ける。他にも、例えば上述した劣化事象(設備の劣化の原因となる事象)には長時間の日照も含まれるが、変色は長時間の日照の影響を大きく受ける。本変形例では、劣化度判定部103が、設備の劣化の種類毎に劣化度の判定条件(例えば上述した劣化度の時系列変化の傾き)を異ならせた上で劣化度を判定する。
劣化度判定部103は、例えば、劣化の種類毎に複数の立地条件に基づいて劣化度を判定する。
図19A~19Cは本変形例の関係式テーブルの一例を表す。図19Aでは、「腐食」という劣化の種類について、「Th71未満」、「Th71以上Th72未満」及び「Th72以上」という立地条件(海からの距離)及び「B3」、「B2」及び「B1」という図8に表す関係式が対応付けられている。
図19A~19Cは本変形例の関係式テーブルの一例を表す。図19Aでは、「腐食」という劣化の種類について、「Th71未満」、「Th71以上Th72未満」及び「Th72以上」という立地条件(海からの距離)及び「B3」、「B2」及び「B1」という図8に表す関係式が対応付けられている。
図19Bでは、「ひび割れ」という劣化の種類について、「Th71未満」及び「Th71以上」という立地条件(海からの距離)及び「B2」及び「B1」という関係式が対応付けられている。図19Cでは、「変形」という劣化の種類について、立地条件(海からの距離)に関係なく「B1」という関係式が対応付けられている。
「腐食」は海からの距離という立地条件の影響が大きいため、劣化度判定部103は、海からの距離が近い(距離がTh71未満の)設備については時系列変化の傾きが大きく劣化度が高くなりやすい関係式B3を用いて判定を行う。一方、「ひび割れ」は「腐食」ほど海からの距離という立地条件の影響が大きくないため、劣化度判定部103は、海からの距離が同じ(距離がTh71未満の)設備であっても、時系列変化の傾きがB3よりも小さい関係式B2を用いて判定を行う。
また、「変形」は海からの距離という立地条件の影響がないため、劣化度判定部103は、立地条件に関わらず時系列変化の傾きが最も小さい関係式B1を用いて判定を行う。図19A~19Cに表す劣化の種類以外にも、「凍結」等について関係式テーブルが定められているものとする。なお、海からの距離以外の立地条件についても関係式テーブルが定められていてもよい。いずれの関係式テーブルでも、立地条件の影響が大きい劣化の種類ほど、時系列変化の傾きが大きい関係式が用いられるように対応付けがなされている。
劣化度判定部103は、各関係式テーブルを用いて劣化の種類毎に劣化度を判定する。運行計画生成部101は、劣化度判定部103により判定された劣化度の代表値(平均値、中央値又は最大値等)を用いて運行計画を生成する。複数の劣化度の代表値の求め方は、図18A~18Cの説明で述べたとおりである。
本変形例の判定方法を用いると、例えば一部の種類の劣化が著しく進んだ設備があった場合に、劣化の種類毎の劣化度を判定しない場合に比べて、設備全体の劣化度も高く判定されやすくなる。これにより、劣化の種類毎の劣化度を判定しない場合に比べて、一部の種類の劣化が著しく進んだ設備の補修が間に合わずに障害が発生するとういう事態を少なくすることができる。
なお、劣化度判定部103は、図18A~18C及び図19A~19Cの例を組み合わせて、設備の構成物の劣化の種類毎に劣化度の判定条件(例えば上述した劣化度の時系列変化の傾き)を異ならせた上で、構成物毎に劣化度を判定してもよい。この場合、劣化度判定部103は、例えば土台については「ひび割れ」、「腐食」及び「変色」というコンクリートの土台で生じやすい劣化の種類を含んで劣化度を判定するとよい。
また、劣化度判定部103は、鉄塔については「腐食」及び「剥離」という塗装された金属の鉄塔で生じやすい劣化の種類を含んで劣化度を判定するとよい。同じ設備でも構成物によって生じやすい劣化の種類が異なっているので、構成物毎且つ劣化の種類毎に劣化を判定することで、判定方法が一律である場合に比べて、より正確な設備の劣化度を判定することができる。
2-9 検査要件
設備の検査要件として、実施例では移動時間及び滞在時間を確保するという要件が用いられたが、他にも、例えば、設備の検査データを取得するために必要な飛行体の性能(一定以上の飛行時間又は飛行速度で飛行可能、カメラのズームが可能、ホバリングが可能、自動帰還が可能等)を備えるという要件が用いられてもよい。
設備の検査要件として、実施例では移動時間及び滞在時間を確保するという要件が用いられたが、他にも、例えば、設備の検査データを取得するために必要な飛行体の性能(一定以上の飛行時間又は飛行速度で飛行可能、カメラのズームが可能、ホバリングが可能、自動帰還が可能等)を備えるという要件が用いられてもよい。
劣化度が高い設備では詳細な検査データが必要であるため、ドローン20の飛行時間が長くなりやすく、カメラの性能が高いことが望ましい。そこで、運行計画生成部101は、劣化度判定部103により判定された劣化度が高い設備ほど性能が高いドローン20を用いて検査データを取得する運行計画を生成してもよい。この場合も、実施例と同様に、劣化が進んだ設備の検査データの品質を劣化が進んでいない設備の検査データの品質よりも高くすることができる。
2-10 飛行体
実施例では、自律飛行を行う飛行体として回転翼機型の飛行体が用いられたが、これに限らない。自律飛行を行う飛行体は、例えば飛行機型の飛行体であってもよいし、ヘリコプター型の飛行体であってもよい。要するに、操作者の操作により飛行することが可能であり、且つ、検査データを取得する機能を有する飛行体であればよい。
実施例では、自律飛行を行う飛行体として回転翼機型の飛行体が用いられたが、これに限らない。自律飛行を行う飛行体は、例えば飛行機型の飛行体であってもよいし、ヘリコプター型の飛行体であってもよい。要するに、操作者の操作により飛行することが可能であり、且つ、検査データを取得する機能を有する飛行体であればよい。
2-11 各機能を実現する装置
図6に表す各機能を実現する装置は、上述した装置に限らない。例えば、サーバ装置10が実現する機能をプロポ30又は拠点端末40が実現してもよい。その場合はプロポ30又は拠点端末40が本発明の「情報処理装置」の一例となる。要するに、設備検査システム1の全体で図6に表す各機能が実現されていればよい。
図6に表す各機能を実現する装置は、上述した装置に限らない。例えば、サーバ装置10が実現する機能をプロポ30又は拠点端末40が実現してもよい。その場合はプロポ30又は拠点端末40が本発明の「情報処理装置」の一例となる。要するに、設備検査システム1の全体で図6に表す各機能が実現されていればよい。
2-12 発明のカテゴリ
本発明は、上述したサーバ装置10等の情報処理装置の他、各情報処理装置及びドローン20のような飛行体を備える情報処理システム(設備検査システム1はその一例)としても捉えられる。また、本発明は、各情報処理装置が実施する処理を実現するための情報処理方法としても捉えられるし、各情報処理装置を制御するコンピュータを機能させるためのプログラムとしても捉えられる。本発明として捉えられるプログラムは、プログラムを記憶させた光ディスク等の記録媒体の形態で提供されてもよいし、インターネット等のネットワークを介してコンピュータにダウンロードさせ、ダウンロードしたプログラムをインストールして利用可能にするなどの形態で提供されてもよい。
本発明は、上述したサーバ装置10等の情報処理装置の他、各情報処理装置及びドローン20のような飛行体を備える情報処理システム(設備検査システム1はその一例)としても捉えられる。また、本発明は、各情報処理装置が実施する処理を実現するための情報処理方法としても捉えられるし、各情報処理装置を制御するコンピュータを機能させるためのプログラムとしても捉えられる。本発明として捉えられるプログラムは、プログラムを記憶させた光ディスク等の記録媒体の形態で提供されてもよいし、インターネット等のネットワークを介してコンピュータにダウンロードさせ、ダウンロードしたプログラムをインストールして利用可能にするなどの形態で提供されてもよい。
2-13 機能ブロック
なお、上記実施例の説明に用いたブロック図は、機能単位のブロックを示している。これらの機能ブロック(構成部)は、ハードウェア及びソフトウェアの少なくとも一方の任意の組み合わせによって実現される。また、各機能ブロックの実現方法は特に限定されない。
なお、上記実施例の説明に用いたブロック図は、機能単位のブロックを示している。これらの機能ブロック(構成部)は、ハードウェア及びソフトウェアの少なくとも一方の任意の組み合わせによって実現される。また、各機能ブロックの実現方法は特に限定されない。
すなわち、各機能ブロックは、物理的又は論理的に結合した1つの装置を用いて実現されてもよいし、物理的又は論理的に分離した2つ以上の装置を直接的又は間接的に(例えば、有線、無線などを用いて)接続し、これら複数の装置を用いて実現されてもよい。機能ブロックは、上記1つの装置又は上記複数の装置にソフトウェアを組み合わせて実現されてもよい。
機能には、判断、決定、判定、計算、算出、処理、導出、調査、探索、確認、受信、送信、出力、アクセス、解決、選択、選定、確立、比較、想定、期待、見做し、報知(broadcasting)、通知(notifying)、通信(communicating)、転送(forwarding)、構成(configuring)、再構成(reconfiguring)、割り当て(allocating、mapping)、割り振り(assigning)などがあるが、これらに限られない。例えば、送信を機能させる機能ブロック(構成部)は、送信部(transmitting unit)や送信機(transmitter)と呼称される。いずれも、上述したとおり、実現方法は特に限定されない。
2-14 入出力の方向
情報等(※「情報、信号」の項目参照)は、上位レイヤ(又は下位レイヤ)から下位レイヤ(又は上位レイヤ)へ出力され得る。複数のネットワークノードを介して入出力されてもよい。
情報等(※「情報、信号」の項目参照)は、上位レイヤ(又は下位レイヤ)から下位レイヤ(又は上位レイヤ)へ出力され得る。複数のネットワークノードを介して入出力されてもよい。
2-15 入出力された情報等の扱い
入出力された情報等は特定の場所(例えば、メモリ)に保存されてもよいし、管理テーブルを用いて管理してもよい。入出力される情報等は、上書き、更新、又は追記され得る。出力された情報等は削除されてもよい。入力された情報等は他の装置へ送信されてもよい。
入出力された情報等は特定の場所(例えば、メモリ)に保存されてもよいし、管理テーブルを用いて管理してもよい。入出力される情報等は、上書き、更新、又は追記され得る。出力された情報等は削除されてもよい。入力された情報等は他の装置へ送信されてもよい。
2-16 判定方法
判定は、1ビットで表される値(0か1か)によって行われてもよいし、真偽値(Boolean:true又はfalse)によって行われてもよいし、数値の比較(例えば、所定の値との比較)によって行われてもよい。
判定は、1ビットで表される値(0か1か)によって行われてもよいし、真偽値(Boolean:true又はfalse)によって行われてもよいし、数値の比較(例えば、所定の値との比較)によって行われてもよい。
2-17 処理手順等
本開示において説明した各態様/実施例の処理手順、シーケンス、フローチャートなどは、矛盾の無い限り、順序を入れ替えてもよい。例えば、本開示において説明した方法については、例示的な順序を用いて様々なステップの要素を提示しており、提示した特定の順序に限定されない。
本開示において説明した各態様/実施例の処理手順、シーケンス、フローチャートなどは、矛盾の無い限り、順序を入れ替えてもよい。例えば、本開示において説明した方法については、例示的な順序を用いて様々なステップの要素を提示しており、提示した特定の順序に限定されない。
2-18 入出力された情報等の扱い
入出力された情報等は特定の場所(例えばメモリ)に保存されてもよいし、管理テーブルで管理してもよい。入出力される情報等は、上書き、更新、又は追記され得る。出力された情報等は削除されてもよい。入力された情報等は他の装置へ送信されてもよい。
入出力された情報等は特定の場所(例えばメモリ)に保存されてもよいし、管理テーブルで管理してもよい。入出力される情報等は、上書き、更新、又は追記され得る。出力された情報等は削除されてもよい。入力された情報等は他の装置へ送信されてもよい。
2-19 ソフトウェア
ソフトウェアは、ソフトウェア、ファームウェア、ミドルウェア、マイクロコード、ハードウェア記述言語と呼ばれるか、他の名称で呼ばれるかを問わず、命令、命令セット、コード、コードセグメント、プログラムコード、プログラム、サブプログラム、ソフトウェアモジュール、アプリケーション、ソフトウェアアプリケーション、ソフトウェアパッケージ、ルーチン、サブルーチン、オブジェクト、実行可能ファイル、実行スレッド、手順、機能などを意味するよう広く解釈されるべきである。
ソフトウェアは、ソフトウェア、ファームウェア、ミドルウェア、マイクロコード、ハードウェア記述言語と呼ばれるか、他の名称で呼ばれるかを問わず、命令、命令セット、コード、コードセグメント、プログラムコード、プログラム、サブプログラム、ソフトウェアモジュール、アプリケーション、ソフトウェアアプリケーション、ソフトウェアパッケージ、ルーチン、サブルーチン、オブジェクト、実行可能ファイル、実行スレッド、手順、機能などを意味するよう広く解釈されるべきである。
また、ソフトウェア、命令、情報などは、伝送媒体を介して送受信されてもよい。例えば、ソフトウェアが、有線技術(同軸ケーブル、光ファイバケーブル、ツイストペア、デジタル加入者回線(DSL:Digital Subscriber Line)など)及び無線技術(赤外線、マイクロ波など)の少なくとも一方を使用してウェブサイト、サーバ、又は他のリモートソースから送信される場合、これらの有線技術及び無線技術の少なくとも一方は、伝送媒体の定義内に含まれる。
2-20 情報、信号
本開示において説明した情報、信号などは、様々な異なる技術のいずれかを使用して表されてもよい。例えば、上記の説明全体に渡って言及され得るデータ、命令、コマンド、情報、信号、ビット、シンボル、チップなどは、電圧、電流、電磁波、磁界若しくは磁性粒子、光場若しくは光子、又はこれらの任意の組み合わせによって表されてもよい。
本開示において説明した情報、信号などは、様々な異なる技術のいずれかを使用して表されてもよい。例えば、上記の説明全体に渡って言及され得るデータ、命令、コマンド、情報、信号、ビット、シンボル、チップなどは、電圧、電流、電磁波、磁界若しくは磁性粒子、光場若しくは光子、又はこれらの任意の組み合わせによって表されてもよい。
2-21 「判断」、「決定」
本開示で使用する「判断(determining)」、「決定(determining)」という用語は、多種多様な動作を包含する場合がある。「判断」、「決定」は、例えば、判定(judging)、計算(calculating)、算出(computing)、処理(processing)、導出(deriving)、調査(investigating)、探索(looking up、search、inquiry)(例えば、テーブル、データベース又は別のデータ構造での探索)、確認(ascertaining)した事を「判断」「決定」したとみなす事などを含み得る。
本開示で使用する「判断(determining)」、「決定(determining)」という用語は、多種多様な動作を包含する場合がある。「判断」、「決定」は、例えば、判定(judging)、計算(calculating)、算出(computing)、処理(processing)、導出(deriving)、調査(investigating)、探索(looking up、search、inquiry)(例えば、テーブル、データベース又は別のデータ構造での探索)、確認(ascertaining)した事を「判断」「決定」したとみなす事などを含み得る。
また、「判断」、「決定」は、受信(receiving)(例えば、情報を受信すること)、送信(transmitting)(例えば、情報を送信すること)、入力(input)、出力(output)、アクセス(accessing)(例えば、メモリ中のデータにアクセスすること)した事を「判断」「決定」したとみなす事などを含み得る。また、「判断」、「決定」は、解決(resolving)、選択(selecting)、選定(choosing)、確立(establishing)、比較(comparing)などした事を「判断」「決定」したとみなす事を含み得る。つまり、「判断」「決定」は、何らかの動作を「判断」「決定」したとみなす事を含み得る。また、「判断(決定)」は、「想定する(assuming)」、「期待する(expecting)」、「みなす(considering)」などで読み替えられてもよい。
2-22 「に基づいて」の意味
本開示において使用する「に基づいて」という記載は、別段に明記されていない限り、「のみに基づいて」を意味しない。言い換えれば、「に基づいて」という記載は、「のみに基づいて」と「に少なくとも基づいて」の両方を意味する。
本開示において使用する「に基づいて」という記載は、別段に明記されていない限り、「のみに基づいて」を意味しない。言い換えれば、「に基づいて」という記載は、「のみに基づいて」と「に少なくとも基づいて」の両方を意味する。
2-23 「異なる」
本開示において、「AとBが異なる」という用語は、「AとBが互いに異なる」ことを意味してもよい。なお、当該用語は、「AとBがそれぞれCと異なる」ことを意味してもよい。「離れる」、「結合される」などの用語も、「異なる」と同様に解釈されてもよい。
本開示において、「AとBが異なる」という用語は、「AとBが互いに異なる」ことを意味してもよい。なお、当該用語は、「AとBがそれぞれCと異なる」ことを意味してもよい。「離れる」、「結合される」などの用語も、「異なる」と同様に解釈されてもよい。
2-24 「及び」、「又は」
本開示において、「A及びB」でも「A又はB」でも実施可能な構成については、一方の表現で記載された構成を、他方の表現で記載された構成として用いてもよい。例えば「A及びB」と記載されている場合、他の記載との不整合が生じず実施可能であれば、「A又はB」として用いてもよい。
本開示において、「A及びB」でも「A又はB」でも実施可能な構成については、一方の表現で記載された構成を、他方の表現で記載された構成として用いてもよい。例えば「A及びB」と記載されている場合、他の記載との不整合が生じず実施可能であれば、「A又はB」として用いてもよい。
2-25 態様のバリエーション等
本開示において説明した各態様/実施形態は単独で用いてもよいし、組み合わせて用いてもよいし、実行に伴って切り替えて用いてもよい。また、所定の情報の通知(例えば、「Xであること」の通知)は、明示的に行うものに限られず、暗黙的(例えば、当該所定の情報の通知を行わない)ことによって行われてもよい。
本開示において説明した各態様/実施形態は単独で用いてもよいし、組み合わせて用いてもよいし、実行に伴って切り替えて用いてもよい。また、所定の情報の通知(例えば、「Xであること」の通知)は、明示的に行うものに限られず、暗黙的(例えば、当該所定の情報の通知を行わない)ことによって行われてもよい。
以上、本開示について詳細に説明したが、当業者にとっては、本開示が本開示中に説明した実施形態に限定されるものではないということは明らかである。本開示は、請求の範囲の記載により定まる本開示の趣旨及び範囲を逸脱することなく修正及び変更態様として実施することができる。したがって、本開示の記載は、例示説明を目的とするものであり、本開示に対して何ら制限的な意味を有するものではない。
1…設備検査システム、2…ネットワーク、10…サーバ装置、20…ドローン、30…プロポ、40…拠点端末、101…運行計画生成部、102…設備情報記憶部、103…劣化度判定部、104…立地条件取得部、401…運行計画表示部。
Claims (9)
- 検査対象の設備の立地条件に基づいて当該設備の劣化度を判定する判定部と、
複数の前記設備から検査データを取得する飛行体を運行させる計画として、当該複数の設備について判定された前記劣化度に応じた各設備の検査要件を満たす運行計画を生成する生成部と
を備える情報処理装置。 - 前記生成部は、判定された前記劣化度が高い前記設備ほど前記検査データの取得に要する時間を長く見込んで前記運行計画を生成する
請求項1に記載の情報処理装置。 - 前記生成部は、判定された前記劣化度が高い前記設備ほど当該設備の前後の移動時間を長く見込んで前記運行計画を生成する
請求項1又は2に記載の情報処理装置。 - 前記生成部は、判定された前記劣化度が高い前記設備ほど検査データの取得時期を早くする前記運行計画を生成する
請求項1から3のいずれか1項に記載の情報処理装置。 - 前記生成部は、判定された前記劣化度が高い前記設備ほど検査データを取得する周期を短くする前記運行計画を生成する
請求項1から4のいずれか1項に記載の情報処理装置。 - 前記検査データは、前記設備を撮影した画像データであり、
前記生成部は、判定された前記劣化度が高い前記設備ほど撮影条件が良好な日に前記検査データを取得する前記運行計画を生成する
請求項1から5のいずれか1項に記載の情報処理装置。 - 前記判定部は、前記設備の劣化の原因となる事象の発生状況に応じて劣化度の判定条件を変えて前記設備の劣化度を判定する
請求項1から6のいずれか1項に記載の情報処理装置。 - 前記判定部は、前記設備の構成物毎に前記判定条件を異ならせた上で当該構成物毎に劣化度を判定し、
前記生成部は、判定された前記構成物毎の劣化度の代表値を、当該構成物を有する設備の劣化度として用いて前記運行計画を生成する
請求項7に記載の情報処理装置。 - 前記判定部は、前記設備の劣化の種類毎に前記判定条件を異ならせた上で劣化度を判定し、
前記生成部は、判定された前記劣化度の代表値を用いて前記運行計画を生成する
請求項7又は8に記載の情報処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021507333A JP7260631B2 (ja) | 2019-03-18 | 2020-03-16 | 情報処理装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019049804 | 2019-03-18 | ||
| JP2019-049804 | 2019-03-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020189607A1 true WO2020189607A1 (ja) | 2020-09-24 |
Family
ID=72521075
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/011354 WO2020189607A1 (ja) | 2019-03-18 | 2020-03-16 | 情報処理装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7260631B2 (ja) |
| WO (1) | WO2020189607A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7089082B1 (ja) | 2021-03-05 | 2022-06-21 | 株式会社ジャパン・インフラ・ウェイマーク | ボート及び点検システム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017071972A (ja) * | 2015-10-08 | 2017-04-13 | 株式会社ニコン | 点検支援方法および点検支援システム |
| JP2018169995A (ja) * | 2017-03-30 | 2018-11-01 | 株式会社スカイマティクス | ドローンを用いた作業を支援するシステムおよび方法 |
-
2020
- 2020-03-16 JP JP2021507333A patent/JP7260631B2/ja active Active
- 2020-03-16 WO PCT/JP2020/011354 patent/WO2020189607A1/ja active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017071972A (ja) * | 2015-10-08 | 2017-04-13 | 株式会社ニコン | 点検支援方法および点検支援システム |
| JP2018169995A (ja) * | 2017-03-30 | 2018-11-01 | 株式会社スカイマティクス | ドローンを用いた作業を支援するシステムおよび方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7089082B1 (ja) | 2021-03-05 | 2022-06-21 | 株式会社ジャパン・インフラ・ウェイマーク | ボート及び点検システム |
| JP2022135294A (ja) * | 2021-03-05 | 2022-09-15 | 株式会社ジャパン・インフラ・ウェイマーク | ボート及び点検システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7260631B2 (ja) | 2023-04-18 |
| JPWO2020189607A1 (ja) | 2021-12-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107742125B (zh) | 预测和防止在结构资产处的不利状况的深度机器学习 | |
| US11610493B1 (en) | Unmanned aerial vehicles utilized to collect updated travel related data for deliveries | |
| US9959771B1 (en) | Unmanned aerial vehicle routing using real-time weather data | |
| US11561251B2 (en) | Remote autonomous inspection of utility system components utilizing drones and rovers | |
| US11340081B2 (en) | System and method for updating map | |
| CN110992515B (zh) | 使用加速失效时间模型来预测部件的剩余使用寿命的方法和系统 | |
| JP7071544B2 (ja) | 情報処理装置 | |
| WO2020189492A1 (ja) | 情報処理装置及び情報処理方法 | |
| WO2020189607A1 (ja) | 情報処理装置 | |
| CN115453541A (zh) | 降水量预测方法、装置、电子设备及存储介质 | |
| CN117270569A (zh) | 一种基于动态路径规划的山火识别巡检方法 | |
| CN115145311A (zh) | 一种巡检路径规划方法、装置、设备和存储介质 | |
| US11645879B2 (en) | Information-processing device and information-processing method for determining an inspection timing for an aerial vehicle | |
| WO2020153170A1 (ja) | 情報処理装置 | |
| CN107991978A (zh) | 一种基于航空气象数据的飞行决策方法及系统 | |
| CN117151676A (zh) | 使用反事实机器学习模型的交通工具健康管理 | |
| CN115421503A (zh) | 一种用于桥梁的无人机巡检系统 | |
| CN115082396A (zh) | 光伏电站基建进度的智能勘测方法、系统及介质 | |
| WO2020189606A1 (ja) | 情報処理装置 | |
| EP3931813A1 (en) | Device for producing a flight plan for lightweight aircraft | |
| CN112817333A (zh) | 巡检规划方法、装置、设备及计算机可读介质 | |
| WO2020189608A1 (ja) | 情報処理装置 | |
| US11893895B2 (en) | Device for ascertaining a movement corridor for lightweight aircraft | |
| CN117194979A (zh) | 基于人工智能的光伏电站异常信息生成方法和装置 | |
| Li et al. | Artificial Intelligence Patrol System for Transmission Line UAV Based on Ultraviolet Discharge |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20773442 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021507333 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20773442 Country of ref document: EP Kind code of ref document: A1 |