WO2019188941A1 - 解析システム、解析方法、およびプログラム - Google Patents
解析システム、解析方法、およびプログラム Download PDFInfo
- Publication number
- WO2019188941A1 WO2019188941A1 PCT/JP2019/012418 JP2019012418W WO2019188941A1 WO 2019188941 A1 WO2019188941 A1 WO 2019188941A1 JP 2019012418 W JP2019012418 W JP 2019012418W WO 2019188941 A1 WO2019188941 A1 WO 2019188941A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- factor
- microstructure
- state
- analysis
- image
- Prior art date
Links
- 238000004458 analytical method Methods 0.000 title claims abstract description 237
- 238000000034 method Methods 0.000 claims description 129
- 230000007704 transition Effects 0.000 claims description 102
- 239000000463 material Substances 0.000 claims description 73
- 230000008569 process Effects 0.000 claims description 71
- 230000009471 action Effects 0.000 claims description 61
- 238000004519 manufacturing process Methods 0.000 claims description 43
- 238000009795 derivation Methods 0.000 claims description 40
- 230000009466 transformation Effects 0.000 claims description 39
- 230000008859 change Effects 0.000 claims description 28
- 238000011156 evaluation Methods 0.000 claims description 11
- 230000002787 reinforcement Effects 0.000 claims description 8
- 238000004422 calculation algorithm Methods 0.000 claims description 7
- 229910000831 Steel Inorganic materials 0.000 description 127
- 239000010959 steel Substances 0.000 description 127
- 238000012545 processing Methods 0.000 description 57
- 230000006870 function Effects 0.000 description 56
- 238000010586 diagram Methods 0.000 description 36
- 238000003860 storage Methods 0.000 description 28
- 239000013078 crystal Substances 0.000 description 18
- 238000012986 modification Methods 0.000 description 17
- 230000004048 modification Effects 0.000 description 17
- 238000004088 simulation Methods 0.000 description 15
- 238000000265 homogenisation Methods 0.000 description 14
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 13
- 239000003795 chemical substances by application Substances 0.000 description 13
- 238000009826 distribution Methods 0.000 description 12
- 230000006399 behavior Effects 0.000 description 10
- 238000000342 Monte Carlo simulation Methods 0.000 description 9
- 230000014509 gene expression Effects 0.000 description 9
- 238000004891 communication Methods 0.000 description 8
- 239000007769 metal material Substances 0.000 description 8
- 238000006073 displacement reaction Methods 0.000 description 7
- 230000001186 cumulative effect Effects 0.000 description 5
- 238000013213 extrapolation Methods 0.000 description 5
- 229910000734 martensite Inorganic materials 0.000 description 5
- 229910001566 austenite Inorganic materials 0.000 description 4
- 230000001364 causal effect Effects 0.000 description 4
- 238000010438 heat treatment Methods 0.000 description 4
- 239000011159 matrix material Substances 0.000 description 4
- 238000005096 rolling process Methods 0.000 description 4
- 239000000126 substance Substances 0.000 description 4
- 229910045601 alloy Inorganic materials 0.000 description 3
- 239000000956 alloy Substances 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000010899 nucleation Methods 0.000 description 3
- 230000006911 nucleation Effects 0.000 description 3
- 238000005293 physical law Methods 0.000 description 3
- 238000001953 recrystallisation Methods 0.000 description 3
- 238000013528 artificial neural network Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000005315 distribution function Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 229910000859 α-Fe Inorganic materials 0.000 description 2
- 235000013290 Sagittaria latifolia Nutrition 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 235000015246 common arrowhead Nutrition 0.000 description 1
- 238000012669 compression test Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 238000012804 iterative process Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- MYWUZJCMWCOHBA-VIFPVBQESA-N methamphetamine Chemical compound CN[C@@H](C)CC1=CC=CC=C1 MYWUZJCMWCOHBA-VIFPVBQESA-N 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000007788 roughening Methods 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
- 229910000658 steel phase Inorganic materials 0.000 description 1
- 238000009864 tensile test Methods 0.000 description 1
- 238000004800 variational method Methods 0.000 description 1
Images






















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/10—Geometric CAD
- G06F30/17—Mechanical parametric or variational design
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
- G06F30/23—Design optimisation, verification or simulation using finite element methods [FEM] or finite difference methods [FDM]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
- G06F30/27—Design optimisation, verification or simulation using machine learning, e.g. artificial intelligence, neural networks, support vector machines [SVM] or training a model
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2113/00—Details relating to the application field
- G06F2113/26—Composites
Definitions
- the present invention relates to an analysis system, an analysis method, and a program.
- Patent Document 1 describes obtaining an Euler angle change as a result of analysis of a crystal composition model and estimating a tissue state from the Euler angle change.
- Patent Document 1 describes obtaining mechanical properties from a microstructure.
- Non-Patent Document 1 describes a material prediction model that can predict a change in microstructure during heat treatment and a stress-strain curve.
- Patent Document 2 describes using a neural network to predict the impact resistance of a composite material.
- Patent Document 3 describes learning a substance model based on a known substance, and searching for a new substance by inputting target physical properties into the learned substance model.
- Patent Document 1 Patent Document 2, Patent Document 2 and Non-Patent Document 1 cannot estimate the microstructure from the mechanical characteristics.
- a statistical method is used when estimating the structure of the material from the target value of the characteristic of the material. Therefore, there is no guarantee that the material structure is physically reasonable. For this reason, it is necessary to verify that the material structure is physically valid.
- the prediction / search target can only be derived by interpolation, and cannot be derived by extrapolation. That is, with the techniques of Patent Document 2 and Patent Document 3, it is not possible to obtain a solution outside the range in which data used during learning exists.
- Material mechanical properties are due to the microstructure of the material. That is, due to the microstructure of the material, the mechanical properties of the material are obtained as a result of the cause.
- a system for an object that can be observed with a microscope an object that cannot be observed with the naked eye
- the microstructure of the material belongs to a micro system.
- a system for an object that can be observed without using a microscope is a macro system.
- the mechanical properties of the material are determined from the overall material. The entire material can be observed without using a microscope. Therefore, the mechanical properties of the material belong to a macro system.
- a hierarchy in which those having the same size in space is classified as a spatial hierarchy.
- the micro system and the macro system belong to different spatial hierarchies.
- the above-described technique has a problem that when the cause and the result connected by the physical phenomenon belong to different spatial layers, it is not easy to accurately estimate the cause from the result.
- the present invention has been made in view of the above problems, and an object of the present invention is to accurately estimate the cause from the result when the cause and the result connected by a physical phenomenon belong to different spatial hierarchies. .
- First derivation means for deriving a second factor indicating a state in the analysis object when the first factor is given to the analysis object according to a physical phenomenon to be followed by the analysis object; Based on the second factor derived by the first deriving unit, a second deriving unit for deriving a third factor according to a physical phenomenon to be followed by the analysis target; Determining means for determining the first factor corresponding to the third factor based on a result of evaluating the third factor derived by the second deriving unit; The third factor is a factor indicating a result generated in the analysis target due to the first factor and the second factor, The second factor is a factor determined individually for each of the components to be analyzed, The analysis system is characterized in that the third factor is not a factor that is individually determined for each of the components to be analyzed but a factor that is determined for the set of components to be analyzed.
- the analysis system according to (1) wherein the first derivation unit derives the second factor using a mathematical formula based on a physical phenomenon to be followed by the analysis target.
- the determining means uses the first factor used for deriving the third factor when the evaluation value for the third factor derived by the second deriving unit satisfies a predetermined condition.
- the determining unit determines the plurality of first factors used until the predetermined condition is satisfied.
- the creation unit includes the first derivation unit and the second derivation unit.
- the reinforcement learning is Q learning.
- Each of the creation means and the estimation means includes the first derivation means and the second derivation means.
- the analysis object is a material having a microstructure
- the first factor is a factor indicating the content of transition of the microstructure state of the material
- the second factor is a factor indicating a state after transition of the microstructure of the material
- the third factor is a factor relating to mechanical properties of the entire material, (10) or (11), wherein a manufacturing process of the material is determined based on the first factor estimated by the estimating means, and the structural material is manufactured using the manufacturing process.
- a Markov decision process algorithm is used when the first factor corresponding to the third factor is determined;
- the state in the Markov decision process is the state of the component to be analyzed,
- the action in the Markov decision process is the first factor,
- the reward in the Markov decision process is the third factor,
- the analysis system according to any one of (1) to (12), wherein the second factor transitions according to the first factor.
- the analysis target is a product,
- the first factor is a factor indicating the content of the state transition of the component of the product,
- the second factor is a factor indicating a state after transition of the component of the product,
- the analysis system according to any one of (1) to (13), wherein the third factor is a factor determined with respect to a set of components of the product.
- the analysis object is a material having a microstructure
- the first factor is a factor indicating the content of transition of the microstructure state of the material
- the second factor is a factor indicating a state after transition of the microstructure of the material
- the analysis system according to any one of (1) to (14), wherein the third factor is a factor relating to mechanical characteristics of the entire material.
- the second deriving unit is configured to perform the third factor based on a microstructure in which a phase transformation is performed on the microstructure of the state represented by the second factor derived by the first deriving unit.
- a Markov decision process algorithm is used when the first factor corresponding to the third factor is determined;
- the state in the Markov decision process is the second factor,
- the action in the Markov decision process is to change the first factor,
- the reward in the Markov decision process is the change of the third factor,
- the analysis system according to any one of (1) to (5), wherein the state of the second factor is changed by changing the first factor.
- the analysis object is a material having a microstructure
- the first factor is a factor indicating the state of the microstructure in each of the plurality of divided regions of the material
- the second factor is a factor indicating mechanical properties in each of the plurality of divided regions of the material, Any one of (1), (2), (3), (4), (5), and (17), wherein the third factor is a factor indicating mechanical properties of the entire material.
- the third factor is a factor indicating a result generated in the analysis target due to the first factor and the second factor
- the second factor is a factor determined individually for each of the components to be analyzed,
- the analysis method characterized in that the third factor is not a factor that is individually determined for each component to be analyzed but a factor that is determined for the set of components to be analyzed.
- the third factor is a factor indicating a result generated in the analysis target due to the first factor and the second factor,
- the second factor is a factor determined individually for each of the components to be analyzed,
- the third factor is not a factor that is individually determined for each component to be analyzed but a factor that is determined for a set of components to be analyzed.
- FIG. 1 is a diagram for explaining an outline of basic processing.
- FIG. 2 is a diagram illustrating an example of an SS curve.
- FIG. 3 is a diagram for explaining an example of the transition of the microstructure state according to the first embodiment.
- FIG. 4 is a diagram illustrating an example of a microstructure image according to the first embodiment.
- FIG. 5 is a diagram illustrating an example of a method for generating a microstructure image according to the first embodiment.
- FIG. 6A is a diagram illustrating the first state of the first example of the simulation by the Monte Carlo method according to the first embodiment.
- FIG. 6B is a diagram illustrating a first state of the first example of the simulation by the Monte-Carlo method according to the first embodiment.
- FIG. 1 is a diagram for explaining an outline of basic processing.
- FIG. 2 is a diagram illustrating an example of an SS curve.
- FIG. 3 is a diagram for explaining an example of the transition of the microstructure state according to the first embodiment.
- FIG. 6C is a diagram illustrating a first state of the second example of the simulation by the Monte-Carlo method according to the first embodiment.
- FIG. 6D is a diagram illustrating a second state of the second example of the simulation by the Monte-Carlo method according to the first embodiment.
- FIG. 7 is a diagram illustrating an example of the transition of the microstructure after the phase transformation according to the first embodiment.
- FIG. 8 is a diagram illustrating an example of the microstructure image after the phase transformation according to the first embodiment.
- FIG. 9 is a diagram illustrating an example of a method for searching for DP steel having desired mechanical characteristics according to the first embodiment.
- FIG. 10 is a diagram illustrating a process from the initial image of the microstructure to the final image of the microstructure according to the first embodiment.
- FIG. 10 is a diagram illustrating a process from the initial image of the microstructure to the final image of the microstructure according to the first embodiment.
- FIG. 11A is a diagram illustrating an example of an initial Q table according to the first embodiment.
- FIG. 11B is a diagram illustrating an example of the Q table after learning according to the first embodiment.
- FIG. 12 is a diagram illustrating an example of how learning converges according to the first embodiment.
- FIG. 13 is a diagram illustrating a first example of the functional configuration of the analysis apparatus according to the first embodiment.
- FIG. 14 is a flowchart illustrating an example of processing in the analysis apparatus when creating a learning model according to the first embodiment.
- FIG. 15 is a flowchart illustrating an example of processing in the analysis apparatus when estimating the content (behavior) of transition from the initial image of the microstructure to the final image of the microstructure, according to the first embodiment. .
- FIG. 16 is a diagram illustrating an example of a hardware configuration of the analysis apparatus.
- FIG. 17 is a diagram illustrating an example of a functional configuration of the analysis apparatus according to the second embodiment.
- FIG. 18 is a diagram conceptually illustrating an example of processing in the analysis apparatus according to the second embodiment.
- FIG. 19 is a flowchart illustrating an example of processing in the analysis apparatus according to the second embodiment.
- the factor in the micro system is a factor determined in units of a predetermined region that can be observed with a microscope.
- Factors in a micro system are, for example, control factors when manufacturing a material. Examples of such control factors include the shape and orientation of a three-dimensional microstructure, the amount of alloy added, the amount of each of the hard phase and soft phase, the shape distribution, and the strength.
- the factor in a macro system is a factor determined with respect to the whole material. Factors in a macro system are, for example, mechanical properties of the structural material (overall).
- inverse problem analysis the physical laws governing the target system are expressed by a model based on partial differential equations.
- initial conditions and boundary conditions that cause the measured results are determined using the model.
- the present inventors thought that if inverse problem analysis is applied, a solution according to the laws of physics is obtained through a model, so that extrapolation can be performed.
- the spatial hierarchy is a hierarchy in which things having the same size in space are classified. Whether the size of space occupies the same level depends on the classification target. Here, it is assumed that each analysis target component and the set of analysis target components (the entire analysis target) do not have the same size in space.
- the above-described micro system and macro system belong to different spatial layers.
- the physical phenomenon in the same spatial hierarchy refers to a physical phenomenon in a micro system and a physical phenomenon in a macro system.
- the finished product and the parts belong to different spatial layers.
- the physical phenomenon in the same spatial hierarchy refers to a physical phenomenon in a part and a physical phenomenon in a finished product.
- the spatial hierarchy to which each analysis target component belongs and the spatial hierarchy to which the set of analysis target components (the entire analysis target) belongs are different.
- a first factor 101 is given to the analysis target 104.
- the first factor 101 is a factor relating to the state of each component of the analysis target 104.
- the first factor 101 is, for example, a factor indicating the content of state transition of the component of the analysis target 104.
- the first factor 101 may be, for example, a factor indicating the state of the component of the analysis target 104.
- the analysis target 104 is, for example, a structural material or a product. In this case, the analysis object 104 is an analysis object.
- the analysis apparatus derives the second factor 102 by changing the state of the analysis target 104 to which the first factor 101 is given.
- the second factor 102 is a factor indicating the state of the analysis target 104 when the first factor 101 is given to the analysis target 104.
- the second factor 102 is a factor determined individually for each component of the analysis target 104.
- the analysis device derives the second factor 102 according to the physical phenomenon that the analysis target 104 should follow.
- the first factor 101 and the second factor 102 are associated with each other by a mathematical formula based on a physical phenomenon that the analysis target 104 should follow.
- the analysis device derives the third factor 103 based on the second factor 102.
- the third factor 103 is a factor determined for a set of components of the analysis target 104 (the entire analysis target 104).
- the third factor 103 is not individually determined for each component of the analysis target 104.
- Such a third factor 103 is a factor indicating a result generated in the analysis target 104 due to the first factor 101 and the second factor 102.
- the first factor 101 and the second factor 102 belong to the same spatial hierarchy.
- the first factor 101, the second factor 102, and the third factor 103 belong to different spatial layers. In FIG. 1, the case where the first factor 101 and the second factor belong to the first spatial hierarchy 105 and the third factor 103 belongs to the second spatial hierarchy 106 is illustrated.
- the analysis device derives the third factor 103 according to the physical phenomenon that the analysis target 104 should follow.
- the second factor 102 and the third factor 103 are associated with each other by a mathematical formula based on a physical phenomenon that the analysis target 104 should follow.
- the analysis device determines the first factor 101 corresponding to the third factor 103 based on the result of evaluating the third factor 103.
- the analysis apparatus sets a new analysis target 104 when the evaluation value for the third factor 103 does not satisfy a predetermined condition.
- the analysis apparatus derives the second factor 102 and the third factor 103 for the new analysis target 104.
- the analysis device updates the first factor 101 when setting a new analysis target 104.
- the analysis apparatus selects the first factor 101.
- the state of the component of the new analysis object 104 is the one indicated by the latest second factor 102 among the already derived second factors 102.
- the first factor 101 selected as described above is given to the new analysis target 104.
- the updated first factor 101 is given as the state of the component of the new analysis target 104.
- the analysis apparatus repeats selection / update of the first factor 101, derivation of the second factor 102, and derivation of the third factor 103 until the evaluation value for the third factor 103 satisfies a predetermined condition.
- the analysis device corresponds the first factor 101 used for derivation of the third factor 103 to the third factor 103.
- the first factor 101 is determined.
- the analysis apparatus converts all the first factors 101 obtained by the above-described repetition processing to the third factor 101.
- the first factor 101 corresponding to the factor 103 is determined.
- the combination of all the first factors 101 serves as a guideline for a method for deriving the third factors 103.
- the analysis apparatus calculates the latest first factor 101 among the first factors 101 obtained by the above-described repetition process.
- the first factor 101 corresponding to the third factor 103 is determined.
- the first factor 101 serves as a guideline for deriving the third factor 103.
- the inverse problem is a problem of determining the cause (first factor 101) of the result from the result (third factor 103). Further, as described above, the third factor 103 and the first factor 101 belong to different spatial layers.
- the inverse problem dealt with in the embodiment described later is a problem of connecting factors belonging to such different spatial hierarchies.
- Markov decision process ⁇ Markov decision process
- the Markov decision process will be described.
- the Markov decision process itself can be realized by a known technique. Therefore, only the outline will be described here.
- the agent learns a policy that maximizes the reward.
- the Markov decision process deals with optimization problems that determine the action to be taken with respect to the state of the environment by try and error.
- the Markov decision process is represented by the following four elements.
- t represents time and takes values such as 0, 1, 2,...,
- N and K represent the number of elements in a finite set of states and actions, respectively.
- a finite set of states s S ⁇ s 1 , s 2 ,..., S N ⁇
- a finite set of actions a A ⁇ a 1 , a 2 ,..., A K ⁇ Transition function f (s t + 1
- s t , a t ) is a function or a probability density distribution function that transitions to the next state s t + 1 at time t + 1 when taking action a t from state s t at time t.
- Reward function r (s t, a t, s t + 1) is immediate reward obtained when the state s t at time t taking action a t in the time t a transition to a state s t + 1 at the next time t + 1, Or the expected value is represented.
- the action a to be taken by the agent when the current state s is given to the current state s is called a distribution function (probability density function) p (a
- the mapping ⁇ corresponding in form is called policy ⁇ .
- ⁇ [0, 1] is a value called a discount factor, and represents the difference in importance between the current reward and the future reward. “1” is set as ⁇ for the reward with the highest importance, “0” is set as ⁇ for the reward with the lowest importance, and importance is set for the other rewards Depending on, a value greater than 0 and less than 1 is set.
- T written at the upper right of the discount factor ⁇ means an index.
- r t + 1 from state s t at time t taking action a t in the time t is an immediate reward obtained when the transition to the state s t + 1 at the next time t + 1.
- the goal of the Markov decision process is to find the optimal policy ⁇ * to obtain the maximum reward, as shown in Equation (2) below.
- ⁇ ] represents an expected value of the objective function ⁇ (accumulated value of discounted reward (hereinafter referred to as “cumulative reward”)) when the measure ⁇ is taken.
- the analysis target is DP (Dual Phase) steel.
- the first factor is a factor indicating the content of transition of the state of the microstructure of DP steel.
- the second factor is a factor indicating a state after transition of the microstructure of DP steel.
- the third factor is the SS curve of DP steel.
- the description will be made assuming that the microstructure of the DP steel has no regions (voids or the like) other than the hard phase (martensite phase) and the soft phase (ferrite phase). The present inventors have found that by using these factors, the inverse problem can be solved within the framework of the Markov decision process. Therefore, first, these factors will be described.
- FIG. 2 is a diagram illustrating an example of an SS curve.
- the SS curve is a curve representing the relationship between stress and strain.
- the SS curve represents the relationship between true stress and true strain.
- the SS curve is not limited to a curve representing the relationship between true stress and true strain.
- the SS curve is obtained by performing a tensile test or a compression test on DP steel. Therefore, the SS curve is a factor determined for the microstructure of the DP steel microstructure.
- the SS curve is a factor related to the mechanical properties of the entire DP steel.
- the SS curve is determined only for the entire DP steel. That is, the SS curve is not a factor that is individually determined for each of the microstructures of DP steel.
- the difference between the target SS curve 201 and the SS curve 202 derived as described later is the evaluation value for the third factor.
- the predetermined condition described above is that the difference between the target SS curve and the SS curve derived as described later is within a predetermined range.
- the target SS curve is referred to as a target SS curve as necessary.
- the SS curve corresponds to the reward in the Markov decision process.
- the processing procedure for deriving the SS curve corresponds to the reward function r (s t , a t , s t + 1 ).
- the SS curve of DP steel is derived according to the physical phenomenon that occurs in DP steel.
- the microstructure and SS curve of DP steel belong to different spatial layers.
- a homogenization method is employed as an example of a method for consistently and logically explaining the causal relationship of physical phenomena between spatial layers.
- An example of a method for deriving an SS curve from microstructure information using a homogenization method will be described.
- an external strain external force that becomes a tensile load
- stress ⁇ (x) and strain ⁇ (x) at each position x of the microstructure when the set external strain is applied to DP steel are derived by elastoplastic analysis.
- stress ⁇ (x) and strain ⁇ (x) at each position x of the microstructure when the set external strain is applied to DP steel are derived by elastoplastic analysis.
- each position x of the microstructure is each voxel (position) x of the microstructure.
- the displacement u t + 1 (x) of each voxel according to the external strain is derived.
- the strain ⁇ t + 1 (u t + 1 ) (x) of each voxel when the displacement u t + 1 (x) occurs in each voxel is derived using the relational expression between strain and displacement.
- the stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x) of each voxel when the strain ⁇ t + 1 (u t + 1 ) (x) is generated in each voxel is derived using the relational expression of stress and strain. .
- Equation (3) is an example of a mathematical expression that represents a physical phenomenon that DP steel should follow.
- ⁇ t + 1 (x) is the value of the binarized label in the voxel at the position x.
- the value ⁇ t + 1 (x) of the binarized label for the soft phase is “1”.
- the binarized label value ⁇ t + 1 (x) for the hard phase is set to “0”. Therefore, the fact that the voxel at the position x is a hard phase is represented by 1 ⁇ t + 1 (x).
- C A is the compliance showing the relationship between stress and strain when the soft phase is elastoplastic deformation (tensor).
- C B is the compliance showing the relationship between stress and strain when the hard phase is elastoplastic deformation (tensor).
- ⁇ t + 1 represents external strain.
- ⁇ represents the entire region of the DP steel to be analyzed. : Represents taking the tensor product before and after.
- Equation (3) “( ⁇ t + 1 (x) C A + (1 ⁇ t + 1 (x)) C B ) ( ⁇ t + 1 + ⁇ t + 1 (u) (x))” before: is the external strain ⁇ t + 1 Represents a stress generated in the voxel by displacement of the voxel at the position x by u (x). “( ⁇ t + 1 + ⁇ t + 1 (u) (x))” in the expression (3) indicates that the voxel at position x is displaced by u (x) when the external strain ⁇ t + 1 is applied. It represents the distortion that occurs in These tensor products become the strain energy in the voxel at position x. Equation (3) is obtained by integrating (integrating) strain energy in all voxels. The displacements u t (x) of the voxels at all positions x are derived so that the integrated value is minimized.
- the strain ⁇ t + 1 (u t + 1 ) (x) and the stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x) are derived by the homogenization method.
- the SS curve is derived from the strain ⁇ t + 1 (u t + 1 ) (x) and the stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x).
- the homogenization method itself can be realized by using a known technique as described in Non-Patent Documents 2 and 3, for example. The contents of Non-Patent Documents 2 and 3 are all incorporated herein.
- FIG. 3 is a diagram for explaining an example of the transition of the state of the microstructure.
- a square indicates a microstructure image.
- FIG. 3 shows 63 microstructure images 0a to 62a.
- FIG. 4 is a diagram illustrating an example of a microstructure image.
- FIG. 4 shows only 15 microstructure images 0a to 14a out of 63 microstructure images 0a to 62a for convenience of description. The description of the specific contents of the other microstructure images 15a to 62a is omitted.
- the microstructure image corresponds to the environment.
- the state of the microstructure corresponds to the state in the Markov decision process.
- the information indicating the state of the microstructure includes, for example, grain boundaries and orientations of crystal grains and element concentration distribution in the microstructure.
- each state s n of the finite set S of states s includes these pieces of information as elements.
- the microstructure images 0a to 62a include information on grain boundaries and orientations of crystal grains and information on distribution of element concentrations in the microstructure.
- the state of the microstructure is determined individually for each microstructure.
- the contents of the transition of the state of the microstructure include “coarse”, “fine”, and “return”. “Coarse” indicates that crystal growth takes place. “Miniaturization” indicates that recrystallization or phase transformation takes place. “Return” indicates returning to the state at the previous time t. When “coarse” is performed with respect to the state at the previous time t, “return” corresponds to “miniaturization”. When “miniaturized” with respect to the state at the previous time t, “return” corresponds to “coarse”.
- C indicates “coarse”.
- M indicates “miniaturization”.
- R indicates “return”.
- the R arrow line paired with the C arrow line corresponds to “miniaturization”.
- the R arrow line paired with the M arrow line corresponds to “coarse”.
- the state of the microstructure is assumed to transit only to a state connected by one arrow line shown in FIGS. 3 and 4.
- the state of the microstructure image 1a changes to only one of the states of the microstructure images 0a, 3a, and 4a.
- the state of the microstructure image 1a is not changed to the state of the microstructure image 7a by skipping the microstructure image 3a.
- Return is not selected in the state of the microstructure image 0a. In the state of the microstructure 0a, “coarse” or “fine” is selected. In the state of the microstructure images 31a to 62a, “coarse” and “fine” are not selected. In the state of the microstructure images 31a to 62a, only “return” is selected.
- the contents of the transition of the microstructure state correspond to the action of the Markov decision process.
- “coarse” or “fine” is selected as the action a at time t.
- the state of the microstructure images 31a to 62a only “return” is selected as the action a at time t.
- “coarse”, "fine”, or “return” is selected as the action a at time t.
- the number t of transitions of the state of the microstructure is used as the one corresponding to the time t in the Markov decision process.
- the microstructure image 0a is an input image.
- the microstructure image 0a can be obtained, for example, by using a known measurement technique such as EBSD (Electron Backscattering Diffraction) method, optical microscope, or SEM (Scanning Electron Microscope) for DP steel. Therefore, detailed description thereof is omitted here.
- the microstructure image may be a three-dimensional image or a two-dimensional image.
- the microstructure images 1a to 62a are generated based only on images positioned at the start point of the C arrow line or the M arrow line extending toward the image.
- the starting point of the arrow line is the end point without the arrow head of the two end points of the arrow line.
- the microstructure images 1a and 2a are generated based only on the microstructure image 0a.
- the microstructure images 3a and 4a are generated based only on the microstructure image 1a.
- the transition of the state of the microstructure images 0a to 62a is performed according to a physical phenomenon that occurs in DP steel.
- a case where microstructure images 1a to 62a are generated by performing a simulation by the Monte-Carlo method using the Potts model will be described as an example.
- FIG. 5 is a diagram for explaining an example of a method for generating the microstructure images 1a to 62a.
- numerical values 1 to 9 are values indicating crystal orientations. The same numerical value indicates that the crystal orientation is the same.
- a line shows a grain boundary.
- the positions with numerical values are the positions of the lattice points. The position of the lattice point corresponds to, for example, a position irradiated with an electron beam by measurement using the EBSD method.
- the case where the microstructure images 1a and 2a are generated based on the microstructure image 0a will be described as an example.
- the simulation is performed by the following procedures (A) to (G). However, it is assumed here that the region is finite. That is, the number of lattice points is finite.
- B) randomly selecting different orientations S i '(1 ⁇ S i ' ⁇ Q) is the orientation S i (1 ⁇ S i ⁇ Q) at the grid point i.
- the energy E (S i ) of the azimuth S i is expressed by the following equation (4).
- ⁇ SiSj is the Kronecker delta.
- nn represents a lattice point in the nearest neighborhood of the lattice point i.
- J pi and pj are constants representing the magnitude of the interface energy.
- J pi , pj is a value greater than 0 (J pi , pj > 0).
- p i represents the matrix (non-recrystallization region) p m or new phase (recrystallized region) p n.
- J pm and pm represent the interfacial energy between crystal grains of the parent phase.
- J pn and pn represent the interfacial energy between crystal grains of the new phase.
- H is a constant representing the magnitude of energy at the lattice point. H is a value exceeding 0.
- ⁇ is a Heviside function. Qu is the total number of unrecrystallized crystal grains.
- the first term on the left side of the equation (4) represents the grain boundary energy.
- Grain boundary energy is the driving force for crystal grain growth.
- the first term on the left side of the equation (4) indicates that the grain boundary energy increases as the lattice point i is closer to the grain boundary.
- the second term on the left side of equation (4) represents the lattice point energy.
- the lattice point energy is a driving force for nucleation.
- the lattice point energy is greater than 0 when the lattice point i is in the non-recrystallized region, and the lattice point i is in the recrystallized region.
- Equation (4) is an example of a mathematical expression that represents a physical phenomenon that DP steel should follow.
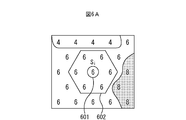
- FIG. 6A to 6D are diagrams conceptually showing a simulation by the Monte Carlo method using the Potts model.
- the constant H is assumed to be less than 2J (H ⁇ 2J).
- a region shown in gray represents a recrystallization region (new phase).
- the other white regions represent non-recrystallized regions (matrix).
- 1 ⁇ S i ⁇ Q u means that the lattice point i is in the parent phase.
- Q u + 1 ⁇ S i ⁇ Q means that the lattice point i is in a new phase.
- FIG. 6A shows that the grid point 601 is selected as the grid point i (see procedure (A)).
- a range 602 is set as the range of the nearest neighbor nn of the grid point 601.
- the orientation S i of the lattice point 601 is 6. Therefore, as shown in FIG. 6B, a value r different from 6 is selected as the direction S i ′ (see procedure (B)).
- E (S i ) is H from the equation (4).
- FIG. 6C shows that the grid point 603 is selected as the grid point i (see procedure (A)).
- a range 604 is set as the range of the nearest neighbor nn of the grid point 603.
- the orientation S i of the lattice point 603 is 4. Therefore, as shown in FIG. 6D, a value r different from 4 is selected as the orientation S i ′ (see procedure (B)).
- This energy difference ⁇ E is a negative value ( ⁇ 0). Therefore, when the value of r is 8, the orientation S i of the lattice point 603 is changed to 8 (see step (D)). Therefore, crystal grains having an orientation of 8 grow. On the other hand, when the value of r is other than 8, the orientation S i of the lattice point 603 is changed to a value other than 6 and 8 (see procedure (D)). Therefore, a new phase (new crystal grains) is generated along with the nucleation.
- the above simulation is performed for 0a.
- microstructure images 1a and 2a are generated.
- the microstructure images 3a to 6a are generated.
- the microstructures 7a to 14a are generated by performing the above simulation using the microstructure images 3a to 6a as the generation microstructure images.
- microstructure images 15a to 30a and microstructure images 31a to 62a are generated.
- the processing procedure for generating the microstructure images 1a to 62a corresponds to the transition function f (s t + 1
- the microstructure image 0a does not include the hard phase and is only the soft phase. Therefore, the microstructure images 1a to 62a also include only the soft phase without including the hard phase.
- the SS curve of only the soft phase does not vary greatly depending on the state of the microstructure. Therefore, in the present embodiment, the above simulation is further performed on each of the microstructure images 0a to 62a, so that the microstructure image includes a hard phase and a soft phase.
- the microstructure image is an image of the microstructure after the phase transformation.
- the phase transformation is an austenite transformation.
- the phase-transformed austenite region changes to a hard phase such as martensite.
- FIG. 7 is a diagram for explaining an example of the transition of the microstructure after the phase transformation.
- the microstructure image 0b shown in FIG. 7 is generated from the microstructure image 0a shown in FIG.
- FIG. 8 is a diagram illustrating an example of a microstructure image after phase transformation.
- FIG. 8 corresponds to FIG. In FIG. 8, for convenience of description, only 15 microstructure images 0b to 14b out of 63 microstructure images 0b to 62b are shown. The description of the contents of the other microstructure images 15b to 63b is omitted.
- the black area indicates the hard phase.
- the white area indicates the soft phase.
- the microstructure after the phase transformation is assumed to be a binarized image. For example, a voxel (or pixel) corresponding to a region of the hard phase is given a binarized label indicating whether the voxel (or pixel) is a soft phase or a hard phase.
- the SS curve is derived as described above using the microstructure images 0b to 62b. If the proportions of the hard phases contained in the microstructure images 0b to 62b are different, the SS curves cannot be evaluated fairly.
- the ratio of the hard phase (martensite) included in the microstructure images 0b to 62b is set to be the same.
- the volume ratios of the hard phases included in the microstructure images 0b to 62b are made the same.
- the area ratios of the hard phases included in the microstructure images 0b to 62b are made the same. For example, 30% can be adopted as the volume ratio and area ratio of the hard phase.
- Non-Patent Document 4 The simulation itself by the Monte-Carlo method using the Potts model can be realized by using a known technique as described in Non-Patent Document 4, for example.
- the contents of Non-Patent Document 4 are all incorporated herein.
- FIG. 9 is a diagram illustrating an example of a method for searching for DP steel having desired mechanical characteristics.
- an initial microstructure image 901 corresponds to, for example, the microstructure image 0a shown in FIGS.
- Policy ⁇ (s 0) is given to determine the actions a 0 which the agent takes the initial image 901 of the microstructure, take action a 0 according the measures.
- Action a 0 is either “coarse” or “fine”.
- the transition-destination microstructure image 902 is the microstructure image 1 a or 2 a.
- the transition is performed so as to satisfy the Markov property. Therefore, the conditional probability distribution of the state S t + 1 at one preceding time t + 1 depends only on the state S t at the current time t.
- the microstructure images 1a to 62a are generated based only on the image located at the starting point of the C arrow line or the M arrow line extending toward the image. Correspond.
- the microstructure image 903 after the phase transformation is generated from the microstructure image 902.
- the microstructure image 902 is the microstructure image 1a
- the microstructure image 1b after the phase transformation is generated.
- the SS curve 202 is derived from the microstructure image 903 after the phase transformation.
- the value of the reward function r (immediate reward) varies depending on whether or not the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range. In this embodiment, when the difference between the target SS curve 201 and the SS curve 202 is not within a predetermined range, the value of the reward function r (immediate reward) is set to zero. When the difference between the target SS curve 201 and the SS curve 202 falls within a predetermined range, the value of the reward function r (immediate reward) is 1.
- the target SS curve 201 is ⁇ *
- the SS curve 202 is ⁇ s .
- An index obtained by quantifying the distance between the target SS curve 201 and the SS curve 202 is d ( ⁇ * , ⁇ s ).
- the Euclidean norm is used as the index.
- a threshold for the distance between the target SS curve 201 and the SS curve 202 is ⁇ .
- the reward function r (s t , a t , s t + 1 ) is expressed by the following equation (5).
- the transition source microstructure images are sequentially made different so as to satisfy the Markov characteristics until the difference between the target SS curve 201 and the SS curve 202 falls within a predetermined range.
- the immediate reward (reward function r (s T ⁇ 1 , a T ⁇ 1 , s T )) is 1 according to the equation (5) at this time.
- a microstructure image 904 in which the immediate reward is 1 is searched. Therefore, the cumulative reward to search the image 904 of the microstructure maximized, reward function r (s t-1, a t-1, s t) is equivalent to searching for a picture of the microstructure becomes 1 It is.
- a microstructure image 905 after the phase transformation is generated from the microstructure image 904 in which the immediate reward is 1.
- the initial image 901 of the microstructure, the image 904 of the microstructure immediate reward is 1
- the action a t from the initial image 901 of the microstructure to the immediate compensation reaches the image 904 of the microstructure becomes 1
- the behavior And information arranged in the order in which they are taken is referred to as manufacturing process information as necessary.
- the production process information is information that serves as a guideline for the temperature control conditions for producing DP steel having a desired SS curve.
- the initial microstructure image 901 is the microstructure image 0a shown in FIG.
- the microstructure image in which the immediate reward is 1 is the microstructure image 46a shown in FIG.
- the transition source microstructure image transitions in the order of 0a ⁇ 1a ⁇ 4a ⁇ 10a ⁇ 22a from the microstructure image 0a to the microstructure image 46a.
- FIG. 10 shows a process from the microstructure image 0a to the microstructure image 46a. In this way, one of the measures ⁇ is searched.
- a learning model is used to derive an optimal policy * .
- the learning model is for searching for a state of the microstructure in which the immediate reward is 1 when the initial state of the microstructure is given.
- the learning model is created by performing reinforcement learning.
- Q learning is used as an example of reinforcement learning will be described as an example.
- the action value function Q ⁇ (s, a) is defined as the following equation (6).
- the immediate reward when the policy ⁇ (s) is taken in the state s is expressed as r (s, ⁇ (s)).
- the transition function in the case of taking the policy ⁇ (s) in the state s is expressed as f (s, ⁇ (s).
- the optimum action value function Q * (s, a) that maximizes the action value function Q ⁇ (s, a) is defined as the following equation (7).
- the policy set M is defined as the following equation (8).
- S is a finite set of states s.
- Equation (9) is called the Bellman equation.
- s ′ f (s, a).
- Q * the optimal action value function
- the Bellman equation of the equation (8) is expressed as the following equation (11).
- Equation (11) is a problem for determining the fixed point Q * .
- Mann iteration can be used as the algorithm for solving the equation (11). In this case, it converges to a fixed point by the following equation (12).
- k is the number of trials of policy ⁇ until the optimal policy ⁇ * is obtained, and is a positive integer.
- the solution search space is ⁇ (s, a).
- the solution search space is limited to a range that satisfies the relationship of the following equation (13).
- a Q table is created by deriving the solution of equation (12) by giving the condition of equation (13).
- the Q table has a size of S ⁇ A consisting of a set (s, a) ⁇ S ⁇ A of an element of the finite set S of the state s (state s) and an element of the finite set A of the behavior a (action a). It is a matrix.
- a Q value is set for each element of the Q table.
- FIG. 11A is a diagram illustrating an example of an initial Q table.
- the action a is “coarseness a 1 ”, “miniaturization a 2 ”, and “return a 3 ”.
- the state s is a state of the microstructure images 0a to 62a. Therefore, the Q table is a 63 ⁇ 3 matrix.
- the numbers assigned as states correspond to the microstructure images 0a to 62a shown in FIG.
- the state 0 corresponds to the state of the microstructure image 0a shown in FIG.
- “return a 3 ” cannot be selected for the microstructure image 0a.
- the Q value of “return” in state 0 (first row) of the Q table is fixed at 0.
- “Coarseized a 1 ” and “miniaturized a 2 ” cannot be selected for the microstructure images 31a to 62a. Therefore, the Q values of “Coarseized a 1 ” and “Fineened a 2 ” in the states 31 to 62 (lines 32 to 61) of the Q table are fixed at 0.
- the Q value (Q (s, a)) of each element of the initial Q table is set by a uniform random number in the range of 0 to 1.
- the Q table derived by the trial count k ⁇ 1 is used.
- the initial Q table is used.
- the Q value (Q (s ′, a 1 ), Q (s ′, a 2 ), Q (s ′, a 3 )) is referred to.
- s ′ is the state after the transition.
- the state s ′ after the transition is determined.
- a 1 , a 2 , and a 3 are elements of a finite set A of actions a.
- a 1 indicates “coarse”.
- a 2 indicates “miniaturization”.
- the Q value (Q (s ′, a 1 ), Q (s ′, a 2 ), Q (s ′, a 3 )) is the Q value (Q (s, a 1 ), Q (s, a 2 )) , Q (s, a 3 )) is determined based on the maximum value.
- the microstructure initial image 901 is the microstructure image 0a.
- the maximum value among the Q values (Q (0, a 1 ), Q (0, a 2 ), Q (0, a 3 )) in the state 0 (first row) is Q (0, a 2 ) It is.
- the state s ′ after the transition is the state 1 (microstructure image 2a). Therefore, the Q value (Q (2, a 1 ), Q (2, a 2 ), Q (2, a 3 )) in state 2 (third row) in FIG. 11A is referred to.
- the maximum Q value among the Q values (Q (s ′, a 1 ), Q (s ′, a 2 ), Q (s ′, a 3 )) is set to FQ k (
- the Q value is updated according to the equation (12) as s, a).
- the maximum value among the Q values (Q (0, a 1 ), Q (0, a 2 ), Q (0, a 3 )) in the state 0 (first row) is Q (0, a 2 ).
- the next state after the state 0 becomes a state 2 (microstructure image 2a) which is transitioned by performing "miniaturization" on the state 0 (microstructure image 0a).
- the Q value (Q (0, a 2 )) is to be updated.
- the maximum value among the Q values (Q (2, a 1 ), Q (2, a 2 ), Q (2, a 3 )) is Q (2, a 3 ).
- the Q value (Q k + 1 (0, a 2 )) at the number of trials k + 1 is calculated by calculating the equation (12) using the Q value (Q (2, a 3 )) as FQ k (s, a). Is derived.
- the Q value (Q (0, a 2 )) is updated to the Q value thus derived.
- the updating of the Q value of the Q table as described above is repeated until a microstructure image with an immediate reward of 1 is obtained.
- the Q value (Q (s, a)) of the Q table corresponding to the state of the microstructure image is updated as follows.
- the first term on the right side of equation (10) (immediate reward r (s, a)) is 1.
- the second term on the right side of equation (10) is 0.
- the Q value (Q k + 1 (s, a)) is derived by calculating the equation (12) using the FQ k (s, a) thus obtained.
- the Q value (Q (s, a)) is updated to the Q value thus derived.
- the value of Q value (Q (46, a 1 ) in state 46 (line 47) is updated.
- one learning (trial of trial number k) is completed by updating the Q value of the Q table until an image of a microstructure having an immediate reward of 1 is obtained.
- the Q table is updated in the same manner as described above, and the next learning (trial number of trials k + 1) is completed.
- the initial microstructure image 901 is fixed (in the example shown in FIG. 3, the microstructure image 0a). Such learning is repeated until a predetermined convergence condition is satisfied.
- FIG. 12 is a diagram illustrating an example of how learning converges.
- the number of actions is the number of actions (state transitions) until an image of a microstructure with an immediate reward of 1 is obtained.
- the number of learning is about 120, the number of actions converges to 5.
- the predetermined convergence condition for example, it can be used that the learning result (manufacturing process information) does not change even if learning is performed a predetermined number of times.
- the Q table is created as described above.
- FIG. 11B is a diagram illustrating an example of the Q table after learning.
- FIG. 13 is a diagram illustrating an example of a functional configuration of the analysis apparatus 1300.
- the information acquisition unit 1310 acquires an initial image 901 of the microstructure of DP steel to be analyzed and information on the target SS curve 201.
- the information is different.
- the information on the initial microstructure image 901 and the target SS curve 201 output to the creation unit 1320 is for creating a Q table.
- the creation unit 1320 creates a Q table.
- the creation unit 1320 includes a state deriving unit 1321, a reward deriving unit 1322, a learning unit 1323, a target determining unit 1324, a determining unit 1325, and a convergence determining unit 1326.
- the storage unit 1330 stores a Q table.
- the Q table is an example of a learning model. Here, the description will be made assuming that the initial Q table is stored in the storage unit 1330 in advance.
- the state deriving unit 1321 is a first deriving unit.
- the state deriving unit 1321 sets an image of the microstructure to be processed.
- the state deriving unit 1321 sets the microstructure initial image 901 output from the information acquisition unit 1310 as the processing target microstructure image.
- the state deriving unit 1321 sets the microstructure image after the transition with respect to the latest microstructure image to be processed as the microstructure image to be processed.
- the state deriving unit 1321 corresponds to the agent in the Markov decision process.
- the state deriving unit 1321 refers to the Q table that is being learned and derives the contents (actions) of state transitions with respect to the processing target microstructure image. Thereby, the next state of the image of the microstructure to be processed is determined.
- the microstructure image corresponds to the cause in the inverse problem.
- the content (action) of the state transition is one of “coarse”, “fine”, and “return”. In the present embodiment, it is assumed in advance that the state of the microstructure image transitions as shown in FIG. Therefore, “return” is not derived in the state of the microstructure image 0a. In the state of the microstructure images 31a to 62a, “coarse” and “fine” are not derived.
- the creation unit 1320 uses the microstructure image 0a as the initial microstructure image 901.
- the microstructure images 1a to 62a other than the microstructure image 0a are derived each time by the state deriving unit 1321.
- the microstructure images 1 a to 62 a may be derived in advance and stored in the storage unit 1330.
- the state deriving unit 1321 derives the microstructure images 1a to 62a by searching the microstructure images 1a to 62a.
- the maximum value among the Q values (Q (0, a 1 ), Q (0, a 2 ), Q (0, a 3 )) in the state 0 (first row) is Q (0, a 1 ).
- the content (action) of the state transition with respect to the state 0 (microstructure image 0a) is “coarse”.
- the state deriving unit 1321 changes the state of the image of the microstructure to be processed according to the state transition content (behavior) derived as described above. Thereby, an image of the microstructure after the transition is derived.
- the state deriving unit 1321 derives, for example, the state 1 (microstructure image 1a) that transitions by performing “coarse” on the state 0 (microstructure image 0a).
- the state deriving unit 1321 derives a microstructure image by performing a simulation by the Monte-Carlo method using the Potts model.
- the state deriving unit 1321 derives the microstructure image after the phase transformation from the microstructure image derived as described above. For example, the state deriving unit 1321 derives the microstructure image 1b after the phase transformation from the microstructure image 1a. In this embodiment, it is assumed that the microstructure images 0b to 62b after the phase transformation are derived each time by the state deriving unit 1321. However, the microstructure images 0b to 62b after the phase transformation may be derived in advance and stored in the storage unit 1330. The state deriving unit 1321 derives the microstructure images 0b to 62b after the phase transformation by searching the microstructure images 0b to 62b after the phase transformation.
- the microstructure image after phase transformation of the initial microstructure image 901 is derived when the initial microstructure image 901 is input.
- the state deriving unit 1321 derives an image of the microstructure after the phase transformation by performing a simulation by the Monte-Carlo method using the Potts model.
- the reward deriving unit 1322 is a second deriving unit.
- the reward deriving unit 1322 derives the SS curve from the microstructure image after the phase transformation.
- the reward deriving unit 1322 derives the SS curve 202 using a homogenization method.
- the SS curve corresponds to the result in the inverse problem.
- it is assumed that the SS curve is derived by the reward deriving unit 1322 each time.
- the SS curve may be derived in advance and stored in the storage unit 1330. In this case, the reward deriving unit 1322 derives the SS curve by searching for the SS curve.
- the learning unit 1323 uses the state (row) corresponding to the image of the microstructure to be processed among the elements of the Q table and the action (column) corresponding to the content of the state transition derived by the state deriving unit 1321. Update the Q value of the determined element. At this time, the learning unit 1323 determines the maximum value of the Q values of the elements determined by the state (row) corresponding to the microstructure image derived by the state deriving unit 1321 among the elements of the Q table as FQ k (s, a ) To obtain the updated Q value by calculating the equation (12).
- the microstructure image 1 a is derived from the microstructure image 0 a by the state deriving unit 1321.
- the maximum value among the Q values (Q (1, a 1 ), Q (1, a 2 ), Q (1, a 3 )) is Q (1, a 2 ).
- the updated Q value (Q k + 1 (0, a 1 )) is obtained by calculating the equation (12) using the Q value (Q (1, a 2 )) as FQ k (s, a). Derived.
- the target determination unit 1324 determines whether or not the difference between the target SS curve 201 and the SS curve 202 derived by the reward deriving unit 1322 is within a predetermined range. In the present embodiment, the target determination unit 1324 determines whether or not the index d ( ⁇ * , ⁇ s ) obtained by quantifying the distance between the target SS curve 201 and the SS curve 202 is below the threshold ⁇ . .
- the state deriving unit 1321 updates the microstructure transition image count t, and resets the processing target microstructure image.
- the state deriving unit 1321 resets the microstructure image obtained by changing the state of the processing target microstructure as the processing target microstructure. For example, it is assumed that the microstructure 1a is derived from the microstructure 0a. In this case, the state deriving unit 1321 resets the microstructure image 1a as a microstructure image to be processed.
- the state deriving unit 1321, the reward deriving unit 1322, the learning unit 1323, and the target determining unit 1324 reset the processing until the difference between the target SS curve 201 and the SS curve 202 falls within a predetermined range. The above processing is repeated for the target microstructure image.
- the determination unit 1325 is activated when the target determination unit 1324 determines that the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range.
- the determining unit 1325 is specified from the microstructure image to be processed at the time when the target determining unit 1324 determines that the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range.
- the state of the microstructure is determined as the state of the microstructure that realizes the target SS curve 201.
- an image of the microstructure to be processed when the difference between the target SS curve 201 and the SS curve 202 is determined to be within a predetermined range by the target determination unit 1324 is necessary. Accordingly, it is referred to as the final image of the microstructure.
- the microstructure image 46a is the final microstructure image.
- the determination unit 1325 generates manufacturing process information that realizes the target SS curve 201.
- the manufacturing process information includes the initial image 901 of the microstructure, the final image of the microstructure, and the contents (action) of the state transition from the initial image 901 of the microstructure to the final image of the microstructure.
- the determination unit 1325 determines the content (action) of state transition from the initial microstructure image 901 to the final microstructure image.
- the convergence determination unit 1326 is activated when the final image of the microstructure is determined by the determination unit 1325. At the timing when the final image of the microstructure is determined by the determination unit 1325, one learning of the Q table is completed.
- the convergence determination unit 1326 determines whether or not a predetermined convergence condition is satisfied. As described above, as a predetermined convergence condition, it can be used that a learning result (manufacturing process information) does not change even if a predetermined number of times of learning is performed. Increasing the predetermined number of times increases the reliability of the Q table. However, if the predetermined number of times is increased too much, the calculation time becomes longer. The predetermined number of times can be determined from such a viewpoint, for example.
- the convergence determination unit 1326 determines that a predetermined convergence condition is not satisfied.
- the state deriving unit 1321 returns the microstructure image to be processed to the initial microstructure image 901.
- the state deriving unit 1321, the reward deriving unit 1322, the learning unit 1323, the target determining unit 1324, the determining unit 1325, and the convergence determining unit 1326 repeatedly perform the above processing until a predetermined convergence condition is satisfied.
- the update (learning) of the Q table stored in the storage unit 1330 ends when the convergence determination unit 1326 determines that a predetermined convergence condition is satisfied.
- the storage unit 1330 stores the Q table for which learning has been completed.
- the estimation unit 1340 uses the learned Q table to estimate the transition content (behavior) from the initial microstructure image 901 to the final microstructure image.
- the estimation unit 1340 includes a state deriving unit 1341, a reward deriving unit 1342, a target determining unit 1343, and a determining unit 1344.
- the state deriving unit 1341 is a first deriving unit.
- the state deriving unit 1341 has the same function as the state deriving unit 1321. Therefore, detailed description of the function of the state deriving unit 1341 is omitted.
- the estimation unit 1340 the information on the microstructure initial image 901 and the target SS curve 201 is used for the DP steel to be estimated for the microstructure.
- the initial microstructure image 901 is not limited to the microstructure image 0a.
- the initial microstructure image 901 may be any one of the microstructure images 0a to 62a.
- the state deriving unit 1341 refers to the learned Q table and derives the state transition content (action) for the processing target microstructure image.
- the state deriving unit 1341 similarly to the state deriving unit 1321, the state deriving unit 1341 derives the microstructure image and the microstructure image after the phase transformation each time.
- the microstructure image and the microstructure image after the phase transformation may be derived in advance and stored in the storage unit 1330.
- the state deriving unit 1341 corresponds to an agent in the Markov decision process.
- the reward deriving unit 1342 is a second deriving unit.
- the reward deriving unit 1342 has the same function as the reward deriving unit 1322.
- the reward deriving unit 1342 derives an SS curve from the microstructure image after the phase transformation using a homogenization method. In the present embodiment, it is assumed that the reward deriving unit 1342 also derives the SS curve each time, similar to the reward deriving unit 1322. However, the SS curve may be derived in advance and stored in the storage unit 1330.
- Target Determination Unit 1343 has the same function as the target determination unit 1324.
- the target determination unit 1343 determines whether or not the difference between the target SS curve 201 and the SS curve 202 derived by the reward deriving unit 1342 is within a predetermined range.
- the state deriving unit 1341 resets the image of the microstructure to be processed. Similarly to the state deriving unit 1321, the state deriving unit 1341 resets the microstructure image obtained by changing the state of the most recent processing target microstructure as the processing target microstructure.
- the state deriving unit 1341, the reward deriving unit 1342, and the target determining unit 1343 are reset until the difference between the target SS curve 201 and the SS curve 202 falls within a predetermined range. The above processing is repeated for the image.
- Determining unit 1344 is activated when the target determination unit 1343 determines that the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range.
- the determination unit 1344 has the same function as that of the determination unit 1325.
- the final microstructure image is an image of the microstructure to be processed when the target determination unit 1343 determines that the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range. .
- the determination unit 1344 derives manufacturing process information for realizing the target SS curve 201.
- the manufacturing process information includes the initial image 901 of the microstructure, the final image of the microstructure, and the contents (action) of the state transition from the initial image 901 of the microstructure to the final image of the microstructure. Are arranged in the order in which the transition is performed. In this manner, the determination unit 1325 determines the content (action) of state transition from the initial microstructure image 901 to the final microstructure image.
- the output unit 1350 When the production process information is derived by the determination unit 1344, the output unit 1350 outputs the production process information. As a form of outputting information, for example, at least one of display on a computer display, storage in an internal or external storage medium of the analysis apparatus 1300, and transmission to an external apparatus can be employed.
- the manufacturing process information output by the output unit 1350 is information serving as a guideline for manufacturing the microstructure that realizes the target SS curve 201. Further, the output unit 1350 may control the manufacturing facility based on the manufacturing process information.
- the DP steel development designer or analysis device 1300 can determine a manufacturing process related to temperature control when manufacturing DP steel based on manufacturing process information output by the output unit 1350. It may not be easy or impossible to realize the manufacturing process determined from the manufacturing process information output by the output unit 1350.
- At least one of changing the target SS curve 201 input to the estimation unit 1340 and changing a predetermined range used by the target determination unit 1343 is performed.
- the stress value in the target SS curve 201 input to the estimation unit 1340 is reduced.
- the predetermined range used by the target determination unit 1343 is increased.
- the determination unit 1344 derives the manufacturing process information again. Such processing is repeated until a manufacturing process determined from the manufacturing process information output by the output unit 1350 can be realized.
- DP steel is manufactured by performing temperature control based on manufacturing process information in a manufacturing facility. As a result, DP steel that achieves the target SS curve 201 is manufactured.
- step S1401 the information acquisition unit 1310 acquires the initial microstructure image 901 and information on the target SS curve 201.
- step S1402 the state deriving unit 1321 sets an image of the microstructure to be processed.
- the state deriving unit 1321 sets the initial microstructure image 901 as a microstructure image to be processed.
- step S1403 the state deriving unit 1321 refers to the Q table that is being learned, and derives the state transition content (action) for the image of the processing target microstructure.
- the Q table is stored in the storage unit 1330.
- the initial Q table is preset with uniform random numbers.
- step S1404 the state deriving unit 1321 changes the state of the image of the microstructure to be processed according to the content (action) of the transition derived in step S1403. Thereby, an image of the microstructure after transition (microstructure in the next state) is derived.
- step S1405 the state deriving unit 1321 derives a microstructure image after phase transformation from the microstructure image generated in step S1404.
- step S1406 the reward deriving unit 1322 derives an SS curve from the microstructure image after the phase transformation derived in step S1405.
- step 1407 the learning unit 1323, among the elements of the Q table, the state (row) corresponding to the processing target microstructure image and the action corresponding to the state transition content derived in step S1403.
- the Q value of the element determined by (column) is updated based on equation (12).
- the target determination unit 1324 determines whether the difference between the target SS curve 201 and the SS curve 202 derived in step S1406 is within a predetermined range.
- step S1409 the state deriving unit 1321 adds “1” to the number of transitions t of the microstructure image. Then, the process returns to step S1402.
- step S1402 the state deriving unit 1321 resets the microstructure image derived in the latest step S1404 as the microstructure image to be processed. Steps S1403 to S1409 are repeatedly executed until the difference between the target SS curve 201 and the SS curve 202 falls within a predetermined range.
- step S1408 If it is determined in step S1408 that the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range, the process proceeds to step S1410.
- the determination unit 1325 determines the microstructure to be processed when it is determined in step S1408 that the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range.
- the microstructure state specified from the image is determined as the microstructure state that realizes the target SS curve 201.
- the microstructure image is the final microstructure image.
- One learning of the Q table ends at the timing when the processing of step S1410 is executed.
- step S1501 the information acquisition unit 1310 acquires an initial image 901 of the microstructure and information on the target SS curve 201.
- step S1502 the state deriving unit 1341 sets an image of the microstructure to be processed.
- the state deriving unit 1341 sets an initial microstructure image 901 as a processing target microstructure image.
- step S1503 the state deriving unit 1341 refers to the learned Q table and derives the state transition content (behavior) for the processing target microstructure image.
- the Q table is stored in the storage unit 1330.
- step S1504 the state deriving unit 1341 changes the state of the image of the microstructure to be processed according to the content (behavior) of the transition derived in step S1503. Thereby, an image of the microstructure after transition (microstructure in the next state) is derived.
- step S1505 the state deriving unit 1341 derives a microstructure image after the phase transformation from the microstructure image generated in step S1504.
- step S1506 the reward deriving unit 1342 derives an SS curve from the microstructure image after the phase transformation derived in step S1505.
- step 1507 the target determination unit 1343 determines whether or not the difference between the target SS curve 201 and the SS curve 202 derived in step S1506 is within a predetermined range.
- step S1508 the state deriving unit 1341 adds “1” to the number of transitions t of the microstructure image. Then, the process returns to step S1502.
- step S1502 the state deriving unit 1341 resets the microstructure image derived in the latest step S1504 as the microstructure image to be processed.
- steps S1503 to S1508 are repeatedly executed until the difference between the target SS curve 201 and the SS curve 202 falls within a predetermined range.
- step S1507 If it is determined in step S1507 that the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range, the process proceeds to step S1509.
- the determination unit 1344 determines whether the difference between the target SS curve 201 and the SS curve 202 is within a predetermined range in step S1507.
- the microstructure state specified from the image is determined as the microstructure state that realizes the target SS curve 201.
- the microstructure image is the final microstructure image. Then, the determination unit 1344 derives manufacturing process information that realizes the target SS curve 201.
- step S1510 the output unit 1350 outputs the manufacturing process information derived in step S1509. And the process by the flowchart of FIG. 15 is complete
- FIG. 16 is a diagram illustrating an example of a hardware configuration of the analysis apparatus 1300.
- an analysis device 1300 includes a CPU 1601, a main storage device 1602, an auxiliary storage device 1603, a communication circuit 1604, a signal processing circuit 1605, an image processing circuit 1606, an I / F circuit 1607, a user interface 1608, a display 1609, and a bus. 1610.
- the CPU 1601 is an arithmetic device and controls the entire analysis device 1300 in an integrated manner.
- the CPU 1601 executes a program stored in the auxiliary storage device 1603 using the main storage device 1602 as a work area.
- the processing of the flowcharts illustrated in FIGS. 14 and 15 is realized by the CPU 1601 executing a program stored in the auxiliary storage device 1603, for example.
- the main storage device 1602 temporarily stores data.
- the auxiliary storage device 1603 stores various data in addition to the program executed by the CPU 1601.
- the auxiliary storage device 1603 stores information necessary for the processing of the flowcharts shown in FIGS. 14 and 15 described above.
- the communication circuit 1604 is a circuit for performing communication with the outside of the analysis apparatus 1300.
- the signal processing circuit 1605 performs various types of signal processing on the signal received by the communication circuit 1604 and the signal input in accordance with control by the CPU 1601.
- the creation unit 1320 and the estimation unit 1340 exhibit their functions by using the CPU 1601 and the signal processing circuit 1605, for example.
- the image processing circuit 1606 performs various types of image processing on the input signal according to control by the CPU 1601.
- the signal subjected to the image processing is output to the display 1609.
- a user interface 1608 is a part where an operator gives an instruction to the analysis apparatus 1300.
- the user interface 1608 includes, for example, buttons, switches, and dials. Further, the user interface 1608 may have a graphical user interface using the display 1609.
- the information acquisition unit 1310 exhibits its function by using, for example, the CPU 1601, the signal processing circuit 1605, and the user interface 1608, and the CPU 1601, the communication circuit 1604, and the signal processing circuit 1605.
- the display 1609 displays an image based on the signal output from the image processing circuit 1606.
- the I / F circuit 1607 exchanges data with a device connected to the I / F circuit 1607.
- FIG. 16 shows a user interface 1608 and a display 1609 as devices connected to the I / F circuit 1607.
- the device connected to the I / F circuit 1607 is not limited to these.
- a portable storage medium may be connected to the I / F circuit 1607.
- at least a part of the user interface 1608 and the display 1609 may be external to the analysis apparatus 1300.
- the output unit 1350 exhibits its function by using, for example, at least one of the communication circuit 1604 and the signal processing circuit 1605, the image processing circuit 1606, the I / F circuit 1607, and the display 1609.
- the CPU 1601, the main storage device 1602, the auxiliary storage device 1603, the signal processing circuit 1605, the image processing circuit 1606, and the I / F circuit 1607 are connected to the bus 1610. Communication between these components takes place via bus 1610. Further, the hardware of the analysis apparatus 1300 is not limited to that shown in FIG. 16 as long as the functions of the analysis apparatus 1300 described above can be realized.
- the analysis apparatus 1300 derives the content (action) of the state transition of the microstructure image.
- the analysis apparatus 1300 derives an image of the microstructure after the transition according to the content of the transition.
- the analysis apparatus 1300 derives the SS curve using the microstructure image after the transition.
- the analysis apparatus 1300 re-derived the content (action) of the state transition of the microstructure image.
- the analysis apparatus 1300 repeats the above processing until the difference between the SS curve and the target SS curve falls within a predetermined range.
- the analysis apparatus 1300 realizes the target SS curve, the state specified from the microstructure image after the transition when the difference between the SS curve and the target SS curve falls within a predetermined range. Determine the state of the microstructure.
- micro system factor microstructure state
- macro system factor SS curve
- the analysis apparatus 1300 performs reinforcement learning by processing including processing for repeatedly determining the state of the microstructure that realizes the target SS curve. Therefore, not only the function corresponding to the interpolation in the case of using the transition function derived by the reinforcement learning but also the function corresponding to the extrapolation can be realized.
- the analysis apparatus 1300 determines the content (action) of state transition from the initial image of the microstructure of DP steel, which is an example of the structural material, to the final image of the microstructure. Therefore, an index can be obtained as to how the microstructure can be produced to produce a structural material that achieves the target SS curve. Accordingly, it is possible to derive a manufacturing process for manufacturing a structural material that realizes the target SS curve. A structural material that achieves the target SS curve can be manufactured without having to manufacture the structural material again and again. Thereby, the development cost and manufacturing cost of a structural material can be reduced.
- the analysis apparatus 1300 derives an image of the microstructure after the phase transformation corresponding to the microstructure image consisting of only the soft phase. Therefore, an image of the microstructure after the phase transformation can be easily derived. Further, by preparing a microstructure image in advance, it is possible to easily change the ratio of the hard phase and derive the microstructure image after the phase transformation.
- the factor relating to the mechanical properties is not limited to the SS curve.
- the analysis target is a structural material
- at least one of tensile strength and uniform elongation may be a factor relating to mechanical properties.
- Tensile strength is the maximum stress in the SS curve.
- Uniform elongation is the strain corresponding to the maximum stress in the SS curve.
- 0.2% proof stress and total elongation may be used as factors relating to mechanical properties.
- the microstructure image includes information on grain boundaries and orientations of crystal grains and information on the distribution of element concentration in the microstructure has been described as an example. However, this is not always necessary. For example, information on the distribution of element concentration in the microstructure may be managed separately from the microstructure image.
- the analysis target is DP steel
- the analysis target is not limited to DP steel.
- the analysis target may be a material having a microstructure other than DP steel. Steel materials other than DP steel and other metal materials can be analyzed. Moreover, materials (for example, semiconductor) other than a metal material may be used. Moreover, materials other than materials may be used.
- ⁇ Fourth Modification> it is preferable to derive an image of a microstructure composed of only the soft phase and derive an image of the microstructure after the phase transformation corresponding to the microstructure image composed of only the soft phase.
- a microstructure image after phase transformation may be prepared in advance.
- the analysis apparatus 1300 searches for the transition of the microstructure image after the phase transformation (the microstructure images 0b to 62b, not the microstructure images 0a to 62a).
- the processing by the state deriving unit 1341, the reward deriving unit 1342, the target determining unit 1343, and the determining unit 1344 may be performed without using the learning model.
- the state deriving unit 1341 does not refer to the Q table. Instead, the state deriving unit 1341 derives, for example, by randomly selecting one of the transition contents (actions) of the state of the microstructure of the DP steel.
- the generation unit 1320 and the estimation unit 1340 have been described by taking the analysis system included in the same analysis device 1300 as an example. However, this is not always necessary.
- the creation unit 1320 and the estimation unit 1340 may be arranged in different analysis devices. In this case, the analysis device is included in the analysis system. Further, the storage unit 1330 may be outside the analysis apparatus 1300.
- Second Embodiment a second embodiment will be described.
- the agent is the analysis device 1300 (the state deriving units 1321 and 1341)
- the agent is a person (material designer)
- This embodiment and the first embodiment are mainly different in configuration and processing due to different agents. Therefore, in the description of the present embodiment, detailed description of the same parts as those of the first embodiment is omitted.
- FIG. 17 is a diagram illustrating an example of a functional configuration of the analysis apparatus 1700.
- FIG. 18 is a diagram for conceptually explaining an example of processing in the analysis apparatus 1700.
- the hardware of the analysis apparatus 1700 can be realized by, for example, the one shown in FIG.
- the information acquisition unit 1701 acquires a three-dimensional image of the microstructure of DP steel to be analyzed.
- the three-dimensional image of the DP steel microstructure is referred to as a microstructure 3D image as necessary.
- the microstructure 3D image can be obtained by using a known technique such as EBSD (Electron Backscattering Diffraction) or TEM (Transmission Electron Microscope). Therefore, detailed description thereof is omitted here.
- EBSD Electron Backscattering Diffraction
- TEM Transmission Electron Microscope
- the state deriving unit 1702 is a first deriving unit.
- the state deriving unit 1702 changes the value of the binarized label in each voxel of the microstructure 3D image based on an instruction from the outside.
- the instruction from the outside is performed as follows, for example. That is, the agent (material designer) performs an operation of changing the microstructure distribution (soft phase and hard phase region) in the VR space using a VR (Virtual Reality) device.
- the VR device is, for example, a VR head mounted display and a gesture input device.
- the state deriving unit 1702 changes the value of the binarized label in each voxel of the microstructure 3D image so as to match the content of the operation.
- the agent (material designer) can change the value of the binarized label in the voxel corresponding to the stress concentration location in DP steel, for example.
- the microstructure 3D image corresponds to the environment. Changing the value of the binary labels in each voxel microstructure 3D image corresponds to the behavior (action) a t in the Markov decision process. Also, the value of the binarized label in each voxel of the microstructure 3D image corresponds to the cause in the inverse problem. Further, since the value of the binary labels in each voxel microstructure 3D image is changed, the state (state) S t transitions. The state includes stress and strain in each voxel, as will be described later. Further, in the present embodiment, the microstructural change count t is used as the time t in the Markov decision process.
- each state s n of the finite set S of states of microstructure as its elements, the value of the binary labels in each voxel, it is assumed that the stress, and a strain.
- the state may be defined separately for each binarized label value, stress, and strain.
- each action ak of the finite set A of micro-organized actions includes a value related to the change of the value of the binarized label in each voxel as its element.
- the value relating to the change is a value indicating whether or not to keep the binarized label value as it is.
- the state deriving unit 1702 sets an external strain (external force serving as a tensile load) applied to the DP steel when the value of the binarized label in each voxel of the microstructure 3D image is changed.
- the state deriving unit 1702 derives the stress ⁇ (x) and the strain ⁇ (x) at each position x of the microstructure 3D image when the set external strain is applied to the DP steel by elastic-plastic analysis.
- DP steel is divided into units of voxels (that is, one divided region is set as one voxel), and stress ⁇ (x) and strain ⁇ (x) in a plurality of divided voxels are obtained.
- the divided areas are not limited to such areas.
- a mesh region used in numerical analysis may be set as a divided region.
- a division area means each area
- the state of each microstructure is determined by the value of the binarized label in each voxel of the microstructure 3D image.
- the value of the binarized label in each voxel of the microstructure 3D image is the first factor (factor relating to the microstructure in each of the plurality of divided regions of the metal material).
- the state deriving unit 1702 derives the strain ⁇ t + 1 (u t + 1 ) (x) and the stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x) using a homogenization method.
- the homogenization method plays a role of a methodology for consistently and logically explaining the physical phenomenon between the spatial layers described above. The homogenization method has been described in the first embodiment.
- the state deriving unit 1702 derives a set of the strain ⁇ t + 1 (u t + 1 ) (x) and the stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x) for all voxels at the positions x.
- the state deriving unit 1702 sets a plurality of predetermined external strains as external strains applied to the DP steel.
- the state deriving unit 1702 performs the strain ⁇ t + 1 (u t + 1 ) (x) and the stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x) as described above for each of the cases where each external strain is applied to the DP steel.
- the state deriving unit 1702 changes the value of the binarized label of the microstructure 3D image to thereby change the microstructure of the DP steel (the strain ⁇ t + 1 (u t + 1 ) (x in each voxel x). ) And stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x)).
- the strain ⁇ t + 1 (u t + 1 ) (x in each voxel x). the strain ⁇ t + 1 (u t + 1 ) (x in each voxel x).
- the state of the microstructure of DP steel (strain ⁇ t + 1 (u t + 1 ) (x) and stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x)) in each voxel x
- the state s t + 1 at the next time t + 1 the transition when the state s t at time t taking action a t is uniquely determined.
- this uniquely determined state is expressed as s t + 1 as a t (s t ).
- s t , a t ) is a function that is 1 when st t + 1 is a t (s t ), and is 0 when it is not.
- the external strain is applied to the DP steel as described above.
- a set of strains ⁇ t (u t ) (x) and stresses ⁇ t ( ⁇ t (u t )) (x) in voxels at all positions x is derived.
- the state deriving unit 1702 derives a set of strains ⁇ t (u t ) (x) and stresses ⁇ t ( ⁇ t (u t )) (x) in the voxels at all the positions x by a plurality of predetermined external strains.
- the set of strain ⁇ t + 1 (u t + 1 ) (x) and stress ⁇ t + 1 ( ⁇ t + 1 (u t + 1 )) (x) at each position x (voxel) is a second factor (a plurality of metal materials). This is a factor indicating mechanical characteristics in each of the divided regions). The set is determined individually for each microstructure.
- the reward deriving unit 1703 is a second deriving unit.
- the reward deriving unit 1703 when the state deriving unit 1702 applies a certain external strain to the DP steel, strains ⁇ t (u t ) (x) and stress ⁇ t ( ⁇ t ( ⁇ t ( It is activated when a set of u t )) (x) is derived.
- the reward deriving unit 1703 derives representative values of the strain ⁇ t (u t ) (x) and the stress ⁇ t ( ⁇ t (u t )) (x) in the voxels at all the positions x. For example, an average value is used as the representative value. Thereby, one set of strain and stress of DP steel when a certain external strain is applied to DP steel is obtained.
- the reward deriving unit 1703 derives the representative values of the strain and stress of the DP steel as described above for each of cases where a predetermined plurality of external strains are applied to the DP steel. Thereby, a plurality of sets of strain and stress of DP steel are obtained. Then, the reward deriving unit 1703 derives an SS curve from these sets.
- the reward deriving unit 1703 derives the maximum stress in the SS curve as the tensile strength of DP steel.
- the reward deriving unit 1703 derives the uniform elongation of the DP steel using the strain corresponding to the stress.
- the tensile strength of the DP steel in the state of the microstructure of the DP steel (strain ⁇ t (u t ) (x) and stress ⁇ t ( ⁇ t (u t )) (x) in the voxel at each position x) Thickness and uniform elongation are derived.
- the reward deriving unit 1703 derives the hole expansion rate of DP steel based on the tensile strength and uniform elongation of DP steel.
- the hole expansion rate of DP steel can be obtained, for example, by determining a function indicating the relationship between the tensile strength and uniform elongation of DP steel and the hole expansion rate of DP steel by conducting an experiment in advance.
- the hole expansion rate of DP steel can also be obtained by creating a model that predicts the hole expansion rate of DP steel from the tensile strength and uniform elongation of DP steel using a neural network.
- the reward deriving unit 1703 changes the value of the binarized label in each voxel of the microstructure 3D image as the value of the tensile strength, uniform elongation, and hole expansion rate of the DP steel.
- the processing procedure for deriving the tensile strength, uniform elongation, and hole expansion ratio of DP steel as described above is reward functions r 1 (s t , a t , st t + 1 ), r 2 ( s t , a t , s t + 1 ), r 3 (s t , a t , s t + 1 ).
- the reward function r 1 (s t, a t , s t + 1) , the immediate reward tensile strength variation in the DP steel when the state is r 1 t + 1 transitions from s t to s t + 1 (increment or Defined as deriving.
- Reward function r 2 (s t, a t , s t + 1) , the change amount of uniform elongation of DP steel when the state immediately reward is r 2 t + 1 transitions from s t to s t + 1 (increment or decrement) Is defined to derive Reward function r 3 (s t, a t , s t + 1) , the immediate reward r 3 t + 1 in a state the hole expanding ratio change in the DP steel when a transition from s t to s t + 1 (increment or decrement ).
- the reward deriving unit 1703 changes the value of the binarized label in each voxel of the microstructure 3D image, and whenever the microstructure change count t is updated, as described above, the tensile strength of DP steel, The uniform elongation and the hole expansion ratio are derived.
- the tensile strength, uniform elongation, and hole expansion rate of DP steel are factors relating to the mechanical properties of the entire DP steel.
- the tensile strength, uniform elongation, and hole expansion rate of DP steel are the third factors (factors related to mechanical properties of the entire metal material).
- the tensile strength, uniform elongation, and hole expansion ratio of DP steel are factors that are determined for the aggregate of the microstructure of DP steel.
- the tensile strength, uniform elongation, and hole expansion ratio of DP steel are determined only for the entire DP steel, and are not factors that are individually determined for each of the DP steel microstructures.
- the SS curve may be prepared as a table.
- the maximum stress in the SS curve can be derived from the value interpolation formula in the table.
- the interpolation formula is an example of a mathematical expression that represents a physical phenomenon that the analysis target should follow.
- the function indicating the relationship between the tensile strength and uniform elongation of DP steel and the hole expansion ratio of DP steel is an example of a mathematical expression that represents a physical phenomenon to be analyzed. You may derive
- the discount factors ⁇ 1 , ⁇ 2 , ⁇ 3 are determined empirically for each of the reward functions r 1 , r 2 , r 3 based on, for example, past results. If ⁇ 1 , ⁇ 2 , and ⁇ 3 are all “0”, only the immediate rewards r 1 t , r 2 t , and r 3 t when the number of changes t of the microstructure is 1 are adopted. (The reward is not accumulated.)
- the determining unit 1704 derives the accumulated rewards ⁇ 1 , ⁇ 2 , and ⁇ 3 .
- the determination unit 1704 derives a single accumulated reward ⁇ based on the accumulated rewards ⁇ 1 , ⁇ 2 , and ⁇ 3 .
- the accumulated reward ⁇ for example, a solution (equilibrium solution) of a non-cooperative game in game theory called Nash equilibrium can be used.
- the accumulated reward ⁇ is not limited to this.
- the determination unit 1704 may derive the accumulated value of the accumulated rewards ⁇ 1 , ⁇ 2 , and ⁇ 3 as the accumulated reward ⁇ .
- the analysis apparatus 1700 allows each of the microstructure 3D images to be calculated until the determination unit 1704 derives the optimal policy ⁇ * (the optimum value of the binarized label values in all voxels) using the equation (2).
- the change of the value of the binarized label in the voxel is repeatedly performed, and the processes by the state deriving unit 1702, the reward deriving unit 1703, and the determining unit 1704 are repeatedly performed.
- This iterative process can be performed, for example, by applying the dynamic programming described above until the difference between the previous value and the current value of the accumulated reward ⁇ (value function) falls within a predetermined range.
- the accumulated reward ⁇ (value function) is an evaluation value for the third factor described above.
- the predetermined condition described above is that the difference between the previous value and the current value of the accumulated reward ⁇ (value function) falls within a predetermined range.
- ⁇ Output unit 1705 When the determining unit 1704 derives the optimum value of the binarized label value in all voxels by the determining unit 1704, the output unit 1705 outputs information indicating that. As a form of outputting information, for example, at least one of display on a computer display, storage in an internal or external storage medium of the analysis apparatus 1700, and transmission to an external apparatus can be employed.
- step S1901 the information acquisition unit 1701 acquires a microstructure 3D image.
- step S1902 the state deriving unit 1702 changes the value of the binarized label in each voxel of the microstructure 3D image based on an instruction from the outside.
- step S1903 the state deriving unit 1702 adds “1” to the number of changes t of the microstructure. The initial value of the number of changes t of the microstructure is “0”.
- step S1904 the state deriving unit 1702 sets external distortion.
- step S1905 the state deriving unit 1702 causes the strain ⁇ t (u t ) (x) and the stress ⁇ in the voxel at each position x when the external strain set in step S1904 is applied to the DP steel.
- a set of t ( ⁇ t (u t )) (x) is derived using a homogenization method.
- step S1906 the state deriving unit 1702 determines whether or not all predetermined external strains have been set as external strains applied to the DP steel. As a result of the determination, if all external distortions are not set, the process returns to step S1904.
- step S1904 the state deriving unit 1702 sets a new external distortion.
- step S1905 the state deriving unit 1702 causes the strain ⁇ t (u t ) (x) and the stress ⁇ t ( ⁇ t (u) in the voxel at each position x when the new external strain is applied to the DP steel.
- the set of t )) (x) is derived using a homogenization method.
- the processes in steps S1904 to S1906 are repeatedly executed until all external distortions are set.
- step S1907 the reward deriving unit 1703 applies strains ⁇ t (u t ) (x) and stress ⁇ t ( ⁇ ) in the voxels at all positions x when the external strain set in step S1904 is applied to DP steel.
- a representative value of t (u t )) (x) is derived for each external distortion set in step S1904, and an SS curve is created from the result.
- step S1908 the reward deriving unit 1703 derives the maximum stress in the SS curve as the tensile strength of DP steel.
- the reward deriving unit 1703 derives the uniform elongation of the DP steel using the strain corresponding to the maximum stress in the SS curve.
- step S1909 the reward deriving unit 1703 derives the DP steel hole expansion rate based on the tensile strength and uniform elongation of the DP steel derived in step S1908.
- step S1910 the determination unit 1704 obtains the tensile strength, uniform elongation, and DP steel derived in steps S1908 to S1910 until the microstructure change count t reaches “1” to the current value.
- the accumulated rewards ⁇ 1 , ⁇ 2 , and ⁇ 3 are derived based on the hole expansion rate, and the accumulated reward ⁇ is derived based on the accumulated rewards ⁇ 1 , ⁇ 2 , and ⁇ 3 .
- step S1911 the determination unit 1704 determines whether or not the accumulated reward ⁇ derived in step S1910 satisfies a predetermined convergence condition. As a result of this determination, if the accumulated reward ⁇ does not satisfy the predetermined convergence condition, the process returns to step S1902. In step S1902, the state deriving unit 1702 changes the binarized label value in each voxel of the microstructure 3D image. Thereafter, the processes of steps S1902 to S1911 are repeatedly executed until the accumulated reward ⁇ satisfies a predetermined convergence condition by the processes of steps S1903 to S1910.
- step S1912 the determination unit 1704 determines the binarized label value in each voxel as the binarized label value of the (most recent) microstructure changed in step S1902 when a predetermined convergence condition is satisfied. Is determined as the optimum value of.
- step S1913 the output unit 1705 outputs information indicating the optimum value of the binarized label value in each voxel. And the process by the flowchart of FIG. 19 is complete
- the analysis apparatus 1700 derives the tensile strength and uniform elongation of the entire DP steel and the hole expansion ratio of the entire DP steel from the SS curve.
- the analysis apparatus 1700 derives a cumulative reward based on the tensile strength, uniform elongation, and hole expansion rate of the entire DP steel.
- the analysis apparatus 1700 changes the value of the binarized label of each voxel of the microstructure 3D image and repeats the above processing until the accumulated reward converges.
- the analysis apparatus 1700 outputs information indicating the binarized label value of each voxel x of the microstructure 3D image when the accumulated reward converges as an optimum value.
- the factors of macro system tensile strength of DP steel as a whole, uniform elongation, hole expansion ratio, etc.
- the factors of micro system microstructure morphology, alloy composition, etc.
- it can be derived according to the physical phenomenon that occurs inside. Therefore, when a cause and a result connected by a physical phenomenon belong to different spatial hierarchies, the cause can be accurately estimated from the result.
- the analysis apparatus 1900 changes the phase (soft phase or hard phase) of each voxel in the microstructure 3D image
- the target to be changed may be any factor as long as it is a factor (physical quantity) related to the microstructure.
- at least one of the above-described control factors (three-dimensional microstructure morphology / orientation, alloy addition amount, hard phase / soft phase blending amount, morphology distribution, strength, etc.) is changed. be able to.
- ⁇ Second Modification> In this embodiment, the case where the analysis apparatus 1900 acquires a three-dimensional image has been described as an example, but a two-dimensional image may be acquired.
- ⁇ Third Modification> In this embodiment, the tensile strength and uniform elongation have been described as examples as factors (physical quantities) related to mechanical properties of DP steel. However, the factors relating to the mechanical properties of DP steel are not limited to these, and for example, 0.2% proof stress and total elongation may be used.
- ⁇ Fourth Modification> In this embodiment, the case where the hole expansion rate (which is an example of a physical quantity indicating the hole expansion property) is used as a factor (physical amount) related to the fracture characteristics of DP steel has been described as an example. However, the factor regarding the fracture characteristics is not limited to the hole expansion rate. Further, it is not always necessary to derive the hole expansion rate (physical quantity indicating the fracture characteristics).
- the analysis apparatus 1700 may determine whether or not the DP steel having the microstructure of the binarized label value can be manufactured. For example, the analysis apparatus 1700 derives the relationship between the manufacturing conditions and the microstructure of each voxel from, for example, the results of experiments, actual operations, and numerical analysis. Based on this relationship, the analysis apparatus 1700 determines whether the value of the binarized label in each voxel of the microstructure 3D image can be manufactured. The timing of this determination can be a timing when the state deriving unit 1702 changes the value of the binarized label in each voxel of the microstructure 3D image based on an instruction from the outside.
- the timing of this determination may be the timing at which the optimum value of the binarized label value in each voxel is obtained.
- the analysis apparatus 1700 cannot manufacture the binarized label value in each voxel of the microstructure 3D image. You may alert
- the manufacturing condition may be given to the value function as a constraint condition of the value function, for example, by the Lagrange undetermined multiplier method, and optimization considering the constraint condition may be performed.
- the case where the analysis target is DP steel has been described as an example.
- the analysis target is not limited to DP steel, and steel materials other than DP steel and other metal materials can be analyzed.
- materials (for example, semiconductor) other than a metal material may be used.
- materials other than materials may be used.
- a rail car may be used.
- an agent designer of the railway carriage
- the analysis device states the amount of change in the lateral vibration, yawing, and rolling according to a group of equations of motion that describe the wheel shaft, carriage, and lateral vibration, yawing, and rolling of the vehicle to be satisfied when the railway bogie travels. Derived as (state). Then, the analysis device shows a change (increment or decrement) of an index value such as the safety of the railway vehicle and the ride comfort from at least one of the change amount of the lateral vibration, yawing and rolling.
- an iron core that is one of the components of the electric device may be used.
- an agent designer of an electric device
- the analysis apparatus derives the magnetic flux density and eddy current in the voxel as a state (for one period of the excitation waveform) based on Maxwell's equations.
- the analysis device derives, as a reward, a change (decrease or increment) of the amount obtained by multiplying the iron loss of the iron core by ⁇ 1 based on the magnetic flux density and eddy current for one cycle of the excitation waveform. And evaluate.
- the crystal orientation in the voxel in the three-dimensional image of the iron core is designed.
- the iron loss of an iron core changes also with the shape of an iron core, it may be necessary to evaluate as an iron core, without evaluating only the material (magnetic steel plate etc.) which comprises an iron core.
- an algorithm of the partial observation Markov decision process is applied to act on the environment. The process described in the present embodiment may be performed by adding a process for estimating the state in the case of taking
- the VR device is used to change the microstructure distribution in the VR space, and the binarized label value in each voxel of the microstructure 3D image is changed to match the content of the operation.
- the microstructure distribution can be determined by a variational method. In this case, there is no need to make the distribution of the microstructure different. This is the same even when a factor other than the microstructure distribution is set as the first factor.
- the modification described in the first embodiment can be employed.
- the embodiment of the present invention described above can be realized by a computer executing a program. Further, a computer-readable recording medium in which the program is recorded and a computer program product such as the program can also be applied as an embodiment of the present invention.
- the recording medium for example, a flexible disk, a hard disk, an optical disk, a magneto-optical disk, a CD-ROM, a magnetic tape, a nonvolatile memory card, a ROM, or the like can be used.
- the embodiments of the present invention described above are merely examples of implementation in carrying out the present invention, and the technical scope of the present invention should not be construed as being limited thereto. Is. That is, the present invention can be implemented in various forms without departing from the technical idea or the main features thereof. This application claims priority based on Japanese Patent Application No. 2018-059579 filed in Japan on March 27, 2018, the entire contents of which are incorporated herein by reference.
- the present invention can be used to estimate the cause of a result obtained according to a physical phenomenon.
- the present invention can be used to estimate the microstructure of a structural material having desired mechanical properties.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Geometry (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Computational Mathematics (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Software Systems (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Measuring Or Testing Involving Enzymes Or Micro-Organisms (AREA)
- Geophysics And Detection Of Objects (AREA)
Abstract
解析装置は、第2の因子(102)を、解析対象(104)が従うべき物理現象に従って導出する。解析装置は、第2の因子(102)に基づいて、第3の因子(103)を、解析対象(104)が従うべき物理現象に従って導出する。解析装置は、第3の因子(103)を評価した結果に基づいて、当該第3の因子に対応する第1の因子(102)を決定する。第2の因子(102)は、第1の因子(101)が解析対象(104)に与えられた場合の解析対象における状態を示す。
Description
本発明は、解析システム、解析方法、およびプログラムに関する。
例えば、材料の設計を行うためにミクロ組織を解析することが行われている。
特許文献1には、結晶組成モデルの解析結果として、オイラー角の変化を得ることと、当該オイラー角の変化から組織の状態を推定することとが記載されている。また、特許文献1には、ミクロ組織から機械特性を得ることが記載されている。
非特許文献1には、熱処理中のミクロ組織の変化と、応力-歪曲線とを予測可能な材質予測モデルが記載されている。
特許文献1には、結晶組成モデルの解析結果として、オイラー角の変化を得ることと、当該オイラー角の変化から組織の状態を推定することとが記載されている。また、特許文献1には、ミクロ組織から機械特性を得ることが記載されている。
非特許文献1には、熱処理中のミクロ組織の変化と、応力-歪曲線とを予測可能な材質予測モデルが記載されている。
また、材料の設計を行うために統計学や機械学習を利用することが行われている。特許文献2には、複合材料の耐衝撃性を予測するためにニューラルネットワークを用いることが記載されている。特許文献3には、既知物質に基づいて物質モデルを学習し、学習後の物質モデルに目標物性を入力して新規物質を探索することが記載されている。
東 昌史、外2名、「ミクロ組織予測から機械特性の予測までの一貫材質予測」、新日鉄技報 第392号、2012年、p.45-p.51
H.Moulinec, P.Suquet, A numerical method for computing the overall response of nonlinear composites with complex microstructure. Comput.Methods Appl.Mech.Engrg. 157 (1998), 69-94
J.Zeman, T.W.J.de Geus, J.Vondrejc, R.H.J.Peerlings and M.G.D.Geers, A finite element perspective on nonlinear FFT-based micromechanical simulations Int.J.Numer.Meth.Engng. 111 (2017), 903-926
D.J.Srolovitz, G.S.Grest, M.P.Anderson, Computer Simulation of Recrystallization-I. Homogeneous Nucleation and Growth, Acta metal. 34 (1986),1833-1845
しかしながら、特許文献1、特許文献2、および非特許文献1の技術では、機械特性からミクロ組織を推定することはできない。また、特許文献3の技術では、材料の特性の目標値から当該材料の構造を推定する際に、統計的な手法を用いる。従って、材料の構造が物理的に妥当なものであるという保証はない。このため、材料の構造が物理的に妥当なものであることの検証が必要になる。また、特許文献2および特許文献3の技術では、予測・探索の対象を内挿により導出することしかできず、外挿により導出することができない。即ち、特許文献2および特許文献3の技術では、学習時に用いるデータが存在する範囲外の解を得ることはできない。
材料の機械特性は、材料のミクロ組織に起因するものである。即ち、材料のミクロ組織を原因とし、当該原因の結果として、材料の機械特性が得られる。ここで、顕微鏡で観察することができる物(肉眼では観察することができない物)に対する系をミクロな系とする。そうすると、材料のミクロ組織は、ミクロな系に属する。一方、顕微鏡を使わなくても観察することができる物に対する系をマクロな系とする。材料の機械特性は、材料全体から定まる。材料全体は、顕微鏡を使わなくても観察することができる。従って、材料の機械特性は、マクロな系に属する。ここで、空間を占める大きさが同程度のものが分類される階層を空間階層とする。そうすると、ミクロな系とマクロな系は、異なる空間階層に属する。前述した技術では、このような、物理現象で結ばれる原因と結果が、異なる空間階層に属する場合に、当該結果から当該原因を正確に推定することが容易ではないという問題点がある。
本発明は、以上の問題点に鑑みてなされたものであり、物理現象で結ばれる原因と結果が、異なる空間階層に属する場合に、当該結果から当該原因を正確に推定することを目的とする。
以上の課題を解決するための手段の一例は、以下の通りである。
(1)
第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出手段と、
前記第1の導出手段により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出手段と、
前記第2の導出手段により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定手段と、を有し、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とする解析システム。
(2)
前記第1の導出手段は、前記解析対象が従うべき物理現象に基づく数式を用いて前記第2の因子を導出することを特徴とする(1)に記載の解析システム。
(3)
前記第2の導出手段は、前記解析対象が従うべき物理現象に基づく数式を用いて前記第3の因子を導出することを特徴とする(1)または(2)に記載の解析システム。
(4)
前記決定手段は、前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たす場合に、当該第3の因子の導出のために用いられた前記第1の因子を、前記第3の因子に対応する前記第1の因子として決定することを特徴とする(1)~(3)の何れか1つに記載の解析システム。
(5)
前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たさない場合に、新たな前記解析対象に対して、前記第1の導出手段による新たな前記第2の因子の導出と、前記第2の導出手段による新たな前記第3の因子の導出とが行われることを特徴とする(1)~(4)の何れか1つに記載の解析システム。
(6)
前記新たな解析対象における前記構成要素の状態は、前記第1の導出手段により導出された最新の前記第2の因子であることを特徴とする(5)に記載の解析システム。
(7)
前記決定手段は、前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たす場合、当該所定の条件を満たすまでに用いられた複数の前記第1の因子を、前記第3の因子に対応する前記第1の因子として決定することを特徴とする(6)に記載の解析システム。
(8)
初期の前記解析対象を示す情報から、前記所定の条件を満たす前記第3の因子に対応する前記複数の第1の因子を導出する学習モデルを、強化学習を行うことにより作成する作成手段を有し、
前記作成手段が、前記第1の導出手段、および前記第2の導出手段を有することを特徴とする(6)または(7)に記載の解析システム。
(9)
前記強化学習は、Q学習であることを特徴とする(8)に記載の解析システム。
(10)
前記学習モデルを用いて、前記所定の条件を満たす前記第3の因子に対応する前記複数の第1の因子を推定する推定手段を有し、
前記作成手段と、前記推定手段とのそれぞれが、前記第1の導出手段、および前記第2の導出手段を有することを特徴とする(8)または(9)に記載の解析システム。
(11)
前記解析対象は、製品であり、
前記第1の因子は、前記製品の構成要素の遷移の内容を示す因子であり、
前記第2の因子は、前記製品の構成要素の遷移後の状態を示す因子であり、
前記第3の因子は、前記製品の構成要素の集合に対して定まる因子であり、
前記推定手段により推定された前記第1の因子に基づいて、前記製品の製造工程が決定され、当該製造工程を用いて前記製品が製造されることを特徴とする(10)に記載の解析システム。
(12)
前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料のミクロ組織の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記材料のミクロ組織の遷移後の状態を示す因子であり、
前記第3の因子は、前記材料全体における機械特性に関する因子であり、
前記推定手段により推定された前記第1の因子に基づいて、前記材料の製造工程が決定され、当該製造工程を用いて前記構造材料が製造されることを特徴とする(10)または(11)に記載の解析システム。
(13)
前記第3の因子に対応する前記第1の因子が決定される際にマルコフ決定過程のアルゴリズムが用いられ、
マルコフ決定過程における状態は、前記解析対象の構成要素の状態であり、
マルコフ決定過程における行動は、前記第1の因子であり、
マルコフ決定過程における報酬は、前記第3の因子であり、
前記第2の因子は、前記第1の因子に従って遷移することを特徴とする(1)~(12)の何れか1つに記載の解析システム。
(14)
前記解析対象は、製品であり、
前記第1の因子は、前記製品の構成要素の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記製品の構成要素の遷移後の状態を示す因子であり、
前記第3の因子は、前記製品の構成要素の集合に対して定まる因子であることを特徴とする(1)~(13)の何れか1つに記載の解析システム。
(15)
前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料のミクロ組織の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記材料のミクロ組織の遷移後の状態を示す因子であり、
前記第3の因子は、前記材料全体における機械特性に関する因子であることを特徴とする(1)~(14)の何れか1つに記載の解析システム。
(16)
前記第2の導出手段は、前記第1の導出手段により導出された前記第2の因子で示される状態のミクロ組織に対して相変態が行われたミクロ組織に基づいて、前記第3の因子を導出することを特徴とする(15)に記載の解析システム。
(17)
前記第3の因子に対応する前記第1の因子が決定される際にマルコフ決定過程のアルゴリズムが用いられ、
マルコフ決定過程における状態は、前記第2の因子であり、
マルコフ決定過程における行動は、前記第1の因子を変更することであり、
マルコフ決定過程における報酬は、前記第3の因子の変化分であり、
前記第1の因子を変更することにより、前記第2の因子の状態が遷移するものとすることを特徴とする(1)~(5)の何れか1つに記載の解析システム。
(18)
前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料の複数の分割領域のそれぞれにおけるミクロ組織の状態を示す因子であり、
前記第2の因子は、前記材料の複数の分割領域のそれぞれにおける機械特性を示す因子であり、
前記第3の因子は、前記材料全体における機械特性を示す因子であることを特徴とする(1)、(2)、(3)、(4)、(5)、および(17)の何れか1つに記載の解析システム。
(19)
第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出工程と、
前記第1の導出工程により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出工程と、
前記第2の導出工程により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定工程と、を有し、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とする解析方法。
(20)
第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出工程と、
前記第1の導出工程により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出工程と、
前記第2の導出工程により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定工程と、をコンピュータに実行させ、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とするプログラム。
(1)
第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出手段と、
前記第1の導出手段により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出手段と、
前記第2の導出手段により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定手段と、を有し、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とする解析システム。
(2)
前記第1の導出手段は、前記解析対象が従うべき物理現象に基づく数式を用いて前記第2の因子を導出することを特徴とする(1)に記載の解析システム。
(3)
前記第2の導出手段は、前記解析対象が従うべき物理現象に基づく数式を用いて前記第3の因子を導出することを特徴とする(1)または(2)に記載の解析システム。
(4)
前記決定手段は、前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たす場合に、当該第3の因子の導出のために用いられた前記第1の因子を、前記第3の因子に対応する前記第1の因子として決定することを特徴とする(1)~(3)の何れか1つに記載の解析システム。
(5)
前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たさない場合に、新たな前記解析対象に対して、前記第1の導出手段による新たな前記第2の因子の導出と、前記第2の導出手段による新たな前記第3の因子の導出とが行われることを特徴とする(1)~(4)の何れか1つに記載の解析システム。
(6)
前記新たな解析対象における前記構成要素の状態は、前記第1の導出手段により導出された最新の前記第2の因子であることを特徴とする(5)に記載の解析システム。
(7)
前記決定手段は、前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たす場合、当該所定の条件を満たすまでに用いられた複数の前記第1の因子を、前記第3の因子に対応する前記第1の因子として決定することを特徴とする(6)に記載の解析システム。
(8)
初期の前記解析対象を示す情報から、前記所定の条件を満たす前記第3の因子に対応する前記複数の第1の因子を導出する学習モデルを、強化学習を行うことにより作成する作成手段を有し、
前記作成手段が、前記第1の導出手段、および前記第2の導出手段を有することを特徴とする(6)または(7)に記載の解析システム。
(9)
前記強化学習は、Q学習であることを特徴とする(8)に記載の解析システム。
(10)
前記学習モデルを用いて、前記所定の条件を満たす前記第3の因子に対応する前記複数の第1の因子を推定する推定手段を有し、
前記作成手段と、前記推定手段とのそれぞれが、前記第1の導出手段、および前記第2の導出手段を有することを特徴とする(8)または(9)に記載の解析システム。
(11)
前記解析対象は、製品であり、
前記第1の因子は、前記製品の構成要素の遷移の内容を示す因子であり、
前記第2の因子は、前記製品の構成要素の遷移後の状態を示す因子であり、
前記第3の因子は、前記製品の構成要素の集合に対して定まる因子であり、
前記推定手段により推定された前記第1の因子に基づいて、前記製品の製造工程が決定され、当該製造工程を用いて前記製品が製造されることを特徴とする(10)に記載の解析システム。
(12)
前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料のミクロ組織の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記材料のミクロ組織の遷移後の状態を示す因子であり、
前記第3の因子は、前記材料全体における機械特性に関する因子であり、
前記推定手段により推定された前記第1の因子に基づいて、前記材料の製造工程が決定され、当該製造工程を用いて前記構造材料が製造されることを特徴とする(10)または(11)に記載の解析システム。
(13)
前記第3の因子に対応する前記第1の因子が決定される際にマルコフ決定過程のアルゴリズムが用いられ、
マルコフ決定過程における状態は、前記解析対象の構成要素の状態であり、
マルコフ決定過程における行動は、前記第1の因子であり、
マルコフ決定過程における報酬は、前記第3の因子であり、
前記第2の因子は、前記第1の因子に従って遷移することを特徴とする(1)~(12)の何れか1つに記載の解析システム。
(14)
前記解析対象は、製品であり、
前記第1の因子は、前記製品の構成要素の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記製品の構成要素の遷移後の状態を示す因子であり、
前記第3の因子は、前記製品の構成要素の集合に対して定まる因子であることを特徴とする(1)~(13)の何れか1つに記載の解析システム。
(15)
前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料のミクロ組織の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記材料のミクロ組織の遷移後の状態を示す因子であり、
前記第3の因子は、前記材料全体における機械特性に関する因子であることを特徴とする(1)~(14)の何れか1つに記載の解析システム。
(16)
前記第2の導出手段は、前記第1の導出手段により導出された前記第2の因子で示される状態のミクロ組織に対して相変態が行われたミクロ組織に基づいて、前記第3の因子を導出することを特徴とする(15)に記載の解析システム。
(17)
前記第3の因子に対応する前記第1の因子が決定される際にマルコフ決定過程のアルゴリズムが用いられ、
マルコフ決定過程における状態は、前記第2の因子であり、
マルコフ決定過程における行動は、前記第1の因子を変更することであり、
マルコフ決定過程における報酬は、前記第3の因子の変化分であり、
前記第1の因子を変更することにより、前記第2の因子の状態が遷移するものとすることを特徴とする(1)~(5)の何れか1つに記載の解析システム。
(18)
前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料の複数の分割領域のそれぞれにおけるミクロ組織の状態を示す因子であり、
前記第2の因子は、前記材料の複数の分割領域のそれぞれにおける機械特性を示す因子であり、
前記第3の因子は、前記材料全体における機械特性を示す因子であることを特徴とする(1)、(2)、(3)、(4)、(5)、および(17)の何れか1つに記載の解析システム。
(19)
第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出工程と、
前記第1の導出工程により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出工程と、
前記第2の導出工程により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定工程と、を有し、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とする解析方法。
(20)
第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出工程と、
前記第1の導出工程により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出工程と、
前記第2の導出工程により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定工程と、をコンピュータに実行させ、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とするプログラム。
<<経緯>>
実施形態を説明する前に、実施形態に至った経緯について説明する。本発明者らは、解析対象において、原因となる因子と当該因子により生じる結果となる因子とを双方向に関連づけることに加えて、結果となる因子から原因となる因子を、内挿だけでなく外挿も行うことにより推定することを着想した。例えば、構造材料を設計する場合、ミクロな系における因子が原因になり、マクロな系における因子が結果になる。
実施形態を説明する前に、実施形態に至った経緯について説明する。本発明者らは、解析対象において、原因となる因子と当該因子により生じる結果となる因子とを双方向に関連づけることに加えて、結果となる因子から原因となる因子を、内挿だけでなく外挿も行うことにより推定することを着想した。例えば、構造材料を設計する場合、ミクロな系における因子が原因になり、マクロな系における因子が結果になる。
ここで、ミクロな系における因子は、顕微鏡で観察することができる所定の領域の単位で定められる因子である。ミクロな系における因子は、例えば、材料を製造する際の制御因子である。このような制御因子としては、例えば、3次元のミクロ組織の形態・方位や、合金の添加量や、硬質相・軟質相の各々の配合量・形態分布・強度等が挙げられる。また、マクロな系における因子は、材料全体に対して定められる因子である。マクロな系における因子は、例えば、構造材料(全体)の機械特性である。
特許文献2、3に記載の技術のように、既存の技術では、統計学や機械学習の理論をもとに、ミクロな系における因子とマクロな系における因子との間の相関関係を定量化することに主眼をおく。このような技術では、大量で有意なデータがあれば、物理法則を用いなくても、材料の設計に資する情報を得ることができる。しかしながら、例えば、材料の場合には、データのサンプル数がたかだか数百程度である。更に、学習時に使用するデータも、画像データ、音声データ、数値データ等、様々なデータであり、決まった形式のデータではない。このため、学習を十分に行うことができない虞がある。また、前述したように、既存の技術では、内挿を行うことは可能であるが、外挿を行うことができない。
そこで、本発明者らは、逆問題解析の技術に着目した。逆問題解析では、対象とする系を支配する物理法則を偏微分方程式等によるモデルで表現する。逆問題解析では、計測された結果を引き起こしている原因である初期条件や境界条件を、当該モデルを用いて決定する。本発明者らは、逆問題解析を適用すれば、モデルを介して物理法則に従った解が得られるため、外挿を行うことが可能になると考えた。
しかしながら、逆問題解析で用いられるモデルは、通常、同一の空間階層における物理現象を合理的に記述する微分方程式である。従って、学習に使用するデータが、複数の空間階層に跨る場合には、空間階層毎に異なるモデルを設定する必要がある。このため、空間階層間の前述した因果関係を定量的に扱うことは困難である。前述したように、空間階層とは、空間を占める大きさが同程度のものが分類される階層である。空間を占める大きさが同程度であるか否かは、分類の対象によって異なる。ここでは、解析対象の構成要素のそれぞれと、解析対象の構成要素の集合(解析対象全体)は、空間を占める大きさが同程度ではないとする。
例えば、前述したミクロな系およびマクロな系は、相互に異なる空間階層に属する。この場合、同一の空間階層における物理現象とは、ミクロな系における物理現象と、マクロな系における物理現象とのそれぞれを指す。
この他、完成品および部品も相互に異なる空間階層に属する。この場合、同一の空間階層における物理現象とは、部品における物理現象と、完成品における物理現象とのそれぞれを指す。
以上のように、解析対象の構成要素のそれぞれが属する空間階層と、解析対象の構成要素の集合(解析対象全体)が属する空間階層とは異なる空間階層になる。
この他、完成品および部品も相互に異なる空間階層に属する。この場合、同一の空間階層における物理現象とは、部品における物理現象と、完成品における物理現象とのそれぞれを指す。
以上のように、解析対象の構成要素のそれぞれが属する空間階層と、解析対象の構成要素の集合(解析対象全体)が属する空間階層とは異なる空間階層になる。
以上のような経緯から、本発明者らは、空間階層間の物理現象の因果関係を、物理法則に則って(物理現象を表現する数式を用いて)表現することができれば、解析対象の構成要素の集合(解析対象全体)に対して定まる因子を評価した結果から、解析対象の構成要素に関する因子を決定することができることを見出した。
<<処理の概要>>
次に、図1を参照しながら、後述する実施形態の基本となる処理の概要を説明する。
解析対象104に対して、第1の因子101が与えられる。第1の因子101は、解析対象104の構成要素のそれぞれの状態に関する因子である。第1の因子101は、例えば、解析対象104の構成要素の状態の遷移の内容を示す因子である。第1の因子101は、例えば、解析対象104の構成要素の状態を示す因子であってもよい。解析対象104は、例えば、構造材料または製品である。この場合、解析対象104は、解析対象物である。
次に、図1を参照しながら、後述する実施形態の基本となる処理の概要を説明する。
解析対象104に対して、第1の因子101が与えられる。第1の因子101は、解析対象104の構成要素のそれぞれの状態に関する因子である。第1の因子101は、例えば、解析対象104の構成要素の状態の遷移の内容を示す因子である。第1の因子101は、例えば、解析対象104の構成要素の状態を示す因子であってもよい。解析対象104は、例えば、構造材料または製品である。この場合、解析対象104は、解析対象物である。
解析装置は、第1の因子101が与えられた解析対象104の状態を遷移させて、第2の因子102を導出する。第2の因子102は、第1の因子101が解析対象104に与えられた場合の解析対象104の状態を示す因子である。ただし、第2の因子102は、解析対象104の構成要素のそれぞれに対して個別に定まる因子である。解析装置は、解析対象104が従うべき物理現象に従って、第2の因子102を導出する。第1の因子101と第2の因子102とは、解析対象104が従うべき物理現象に基づく数式によって、相互に関連付けられる。
解析装置は、第2の因子102に基づいて、第3の因子103を導出する。第3の因子103は、解析対象104の構成要素の集合(解析対象104全体)に対して定まる因子である。第3の因子103は、解析対象104の構成要素のそれぞれに対して個別に定まるものではない。このような第3の因子103は、第1の因子101および第2の因子102を原因として解析対象104に生じる結果を示す因子である。第1の因子101および第2の因子102は、同一の空間階層に属する。第1の因子101および第2の因子102と、第3の因子103は、異なる空間階層に属する。図1では、第1の因子101および第2の因子は第1の空間階層105に属し、第3の因子103は、第2の空間階層106に属する場合を例示する。
解析装置は、解析対象104が従うべき物理現象に従って、第3の因子103を導出する。第2の因子102と第3の因子103とは、解析対象104が従うべき物理現象に基づく数式によって、相互に関連付けられる。
解析装置は、第3の因子103を評価した結果に基づいて、当該第3の因子103に対応する第1の因子101を決定する。解析装置は、第3の因子103に対する評価値が所定の条件を満たさない場合、新たな解析対象104を設定する。解析装置は、新たな解析対象104に対して、第2の因子102の導出と、第3の因子103の導出とを行う。
解析装置は、第3の因子103を評価した結果に基づいて、当該第3の因子103に対応する第1の因子101を決定する。解析装置は、第3の因子103に対する評価値が所定の条件を満たさない場合、新たな解析対象104を設定する。解析装置は、新たな解析対象104に対して、第2の因子102の導出と、第3の因子103の導出とを行う。
解析装置は、新たな解析対象104を設定する際に第1の因子101を更新する。第1の因子101が、解析対象104の構成要素の状態の遷移の内容を示す因子である場合、解析装置は、第1の因子101を選択する。この場合、新たな解析対象104の構成要素の状態は、既に導出されている第2の因子102のうち、最新の第2の因子102が示すものになる。新たな解析対象104に対して、前述したようにして選択された第1の因子101が与えられる。
第1の因子101が、解析対象104の構成要素の状態を示す因子である場合、新たな解析対象104の構成要素の状態として、更新後の第1の因子101が与えられる。
解析装置は、第3の因子103に対する評価値が所定の条件を満たすまで、第1の因子101の選択・更新と、第2の因子102の導出と、第3の因子103の導出とを繰り返す。解析装置は、第3の因子103に対する評価値が所定の条件を満たす場合に、当該第3の因子103の導出のために用いられた第1の因子101を、当該第3の因子103に対応する第1の因子101として決定する。
第1の因子101が、解析対象104の構成要素の状態の遷移の内容を示す因子である場合、解析装置は、前述した繰り返し処理で得られた全ての第1の因子101を、第3の因子103に対応する第1の因子101として決定する。当該全ての第1の因子101の組合せは、当該第3の因子103を導出する方法の指針となる。
第1の因子101が、解析対象104の構成要素の状態を示す因子である場合、解析装置は、前述した繰り返し処理で得られた第1の因子101のうち、最新の第1の因子101を、第3の因子103に対応する第1の因子101として決定する。当該第1の因子101は、当該第3の因子103を導出するための指針となる。
第1の因子101が、解析対象104の構成要素の状態を示す因子である場合、解析装置は、前述した繰り返し処理で得られた第1の因子101のうち、最新の第1の因子101を、第3の因子103に対応する第1の因子101として決定する。当該第1の因子101は、当該第3の因子103を導出するための指針となる。
以下に説明する実施形態では、以上のようにして逆問題を解く処理を基本として各種の処理が実行される。ここで、逆問題は、結果(第3の因子103)から当該結果の原因(第1の因子101)を決定する問題である。また、前述したように、第3の因子103と、第1の因子101は、異なる空間階層に属する。後述する実施形態で扱う逆問題は、このような異なる空間階層に属する因子を繋ぐ問題である。
<<マルコフ決定過程>>
本発明者らは、前述した知見の下、このような逆問題をマルコフ決定過程(Markov Decision Processes)の枠組みの中で解くことができることを見出した。マルコフ決定過程について説明する。尚、マルコフ決定過程自体は公知の技術で実現することができる。従って、ここでは、その概要のみを説明する。
マルコフ決定過程は、エージェント(agent)が報酬(reward)を最大にする方策(policy)を学習するものである。マルコフ決定過程は、環境(environment)の状態(state)に対してとるべき行動(action)を試行錯誤(try and error)により決定する最適化問題を扱う。
本発明者らは、前述した知見の下、このような逆問題をマルコフ決定過程(Markov Decision Processes)の枠組みの中で解くことができることを見出した。マルコフ決定過程について説明する。尚、マルコフ決定過程自体は公知の技術で実現することができる。従って、ここでは、その概要のみを説明する。
マルコフ決定過程は、エージェント(agent)が報酬(reward)を最大にする方策(policy)を学習するものである。マルコフ決定過程は、環境(environment)の状態(state)に対してとるべき行動(action)を試行錯誤(try and error)により決定する最適化問題を扱う。
マルコフ決定過程は、以下の4つの要素により表される。尚、tは時刻を表し、0,1,2,・・・といった値を取り、NおよびKは、それぞれ状態および行動の有限集合の要素の数を表す。
状態sの有限集合 S={s1,s2,・・・,sN}
行動aの有限集合 A={a1,a2,・・・,aK}
遷移関数f(st+1|st,at)
報酬関数r(st,at,st+1)
状態sの有限集合 S={s1,s2,・・・,sN}
行動aの有限集合 A={a1,a2,・・・,aK}
遷移関数f(st+1|st,at)
報酬関数r(st,at,st+1)
遷移関数f(st+1|st,at)は、時刻tの状態stから行動atをとったときに、次の時刻t+1の状態st+1に遷移する関数または確率密度分布関数である。
報酬関数r(st,at,st+1)は、時刻tの状態stから当該時刻tの行動atをとって次の時刻t+1の状態st+1に遷移する際に得られる即時報酬、または、その期待値を表す。
報酬関数r(st,at,st+1)は、時刻tの状態stから当該時刻tの行動atをとって次の時刻t+1の状態st+1に遷移する際に得られる即時報酬、または、その期待値を表す。
そして、マルコフ決定過程では、一般に、現在の状態sに対して現在の状態sが与えられたときにエージェントのとるべき行動aを行動aの分布関数(確率密度関数)p(a|s)という形で対応させる写像πを方策πという。方策πを決定する際に用いられる目的関数ρは、以下の(1)式のように、時刻t=0から将来時刻t=t∞までの割引された報酬の累積値が用いられる。

ここで、γ∈[0,1]は割引因子(discount factor)と呼ばれる値であり、現在の報酬と未来の報酬との間における重要度の差異を表す。重要度の最も高い報酬に対しては、γとして「1」が設定され、重要度の最も低い報酬に対しては、γとして「0」が設定され、その他の報酬に対しては、重要度に応じて0超1未満の値が設定される。割引因子γの右上に表記されているtは、指数を意味する。rt+1は、時刻tの状態stから当該時刻tの行動atをとって次の時刻t+1の状態st+1に遷移する際に得られる即時報酬である。
マルコフ決定過程のゴールは、以下の(2)式のように、最大報酬を得るための最適な方策π*を見つけることである。
マルコフ決定過程のゴールは、以下の(2)式のように、最大報酬を得るための最適な方策π*を見つけることである。

ここで、E[ρ|π]は、方策πをとったときの目的関数ρ(割引された報酬の累積値(以下「累積報酬」と称する))の期待値を表す。
(2)式のようにして、最適な方策π*を導出する手法としては、種々の手法があるが、その一つとして、動的計画法(dynamic programming)と呼ばれるアルゴリズムがある。動的計画法では、方策πによってエージェントのとるべき行動aは決定論的に定まるものとする。動的計画法自体は公知の技術であるので、ここではその詳細な説明を省略する。
<<第1の実施形態>>
以下、第1の実施形態を説明する。
本実施形態では、解析対象がDP(Dual Phase)鋼であるとする。また、第1の因子が、DP鋼のミクロ組織の状態の遷移の内容を示す因子であるとする。また、第2の因子が、DP鋼のミクロ組織の遷移後の状態を示す因子であるとする。また、第3の因子が、DP鋼のS-S曲線であるとする。また、本実施形態では、説明を簡単にするため、DP鋼のミクロ組織に、硬質相(マルテンサイト相)および軟質相(フェライト相)以外の領域(空隙等)がないものとして説明を行う。本発明者らは、これらの因子を用いることにより、逆問題をマルコフ決定過程の枠組みの中で解くことができることを見出した。そこで、まず、これらの因子に関する説明を行う。
以下、第1の実施形態を説明する。
本実施形態では、解析対象がDP(Dual Phase)鋼であるとする。また、第1の因子が、DP鋼のミクロ組織の状態の遷移の内容を示す因子であるとする。また、第2の因子が、DP鋼のミクロ組織の遷移後の状態を示す因子であるとする。また、第3の因子が、DP鋼のS-S曲線であるとする。また、本実施形態では、説明を簡単にするため、DP鋼のミクロ組織に、硬質相(マルテンサイト相)および軟質相(フェライト相)以外の領域(空隙等)がないものとして説明を行う。本発明者らは、これらの因子を用いることにより、逆問題をマルコフ決定過程の枠組みの中で解くことができることを見出した。そこで、まず、これらの因子に関する説明を行う。
[S-S曲線]
第3の因子の一例であるS-S曲線について説明する。
図2は、S-S曲線の一例を示す図である。図2に示すように、S-S曲線は、応力と歪との関係を表す曲線である。図2に示す例では、S-S曲線は、真応力と真ひずみとの関係を表す。ただし、応力と歪との関係を表す曲線であれば、S-S曲線は、真応力と真ひずみとの関係を表す曲線に限定されない。S-S曲線は、DP鋼に対して引張試験または圧縮試験を行うことにより得られる。従って、S-S曲線は、DP鋼のミクロ組織の集合に対して定まる因子である。S-S曲線は、DP鋼の全体における機械特性に関する因子である。従って、S-S曲線は、DP鋼の全体に対してしか定まらない。即ち、S-S曲線は、DP鋼のミクロ組織のそれぞれに対して個別に定まる因子ではない。本実施形態では、目標となるS-S曲線201と、後述するようにして導出されるS-S曲線202との差が、前述した第3の因子に対する評価値になる。また、目標となるS-S曲線と、後述するようにして導出されるS-S曲線との差が、所定の範囲内であることが、前述した所定の条件である。以下の説明では、目標となるS-S曲線を必要に応じて、目標S-S曲線と称する。
S-S曲線は、マルコフ決定過程における報酬(reward)に対応する。また、S-S曲線を導出するための処理手順が報酬関数r(st,at,st+1)に対応する。
第3の因子の一例であるS-S曲線について説明する。
図2は、S-S曲線の一例を示す図である。図2に示すように、S-S曲線は、応力と歪との関係を表す曲線である。図2に示す例では、S-S曲線は、真応力と真ひずみとの関係を表す。ただし、応力と歪との関係を表す曲線であれば、S-S曲線は、真応力と真ひずみとの関係を表す曲線に限定されない。S-S曲線は、DP鋼に対して引張試験または圧縮試験を行うことにより得られる。従って、S-S曲線は、DP鋼のミクロ組織の集合に対して定まる因子である。S-S曲線は、DP鋼の全体における機械特性に関する因子である。従って、S-S曲線は、DP鋼の全体に対してしか定まらない。即ち、S-S曲線は、DP鋼のミクロ組織のそれぞれに対して個別に定まる因子ではない。本実施形態では、目標となるS-S曲線201と、後述するようにして導出されるS-S曲線202との差が、前述した第3の因子に対する評価値になる。また、目標となるS-S曲線と、後述するようにして導出されるS-S曲線との差が、所定の範囲内であることが、前述した所定の条件である。以下の説明では、目標となるS-S曲線を必要に応じて、目標S-S曲線と称する。
S-S曲線は、マルコフ決定過程における報酬(reward)に対応する。また、S-S曲線を導出するための処理手順が報酬関数r(st,at,st+1)に対応する。
[均質化法]
本実施形態では、DP鋼のS-S曲線を、DP鋼に生じる物理現象に従って導出する。DP鋼のミクロ組織とS-S曲線は、異なる空間階層に属する。本実施形態では、空間階層間の物理現象の因果関係を一貫して論理的に説明する手法として均質化法を採用する場合を例に挙げて説明する。
均質化法を用いてミクロ組織の情報からS-S曲線を導出する手法の一例を説明する。
まず、DP鋼に与える外部歪(引張荷重となる外力)を設定する。そして、設定した外部歪をDP鋼に与えたときのミクロ組織の各位置xにおける応力σ(x)および歪ε(x)を弾塑性解析により導出する。ここでは、説明を簡単にするため、ミクロ組織の各位置xを、ミクロ組織の各ボクセル(の位置)xとする場合を例に挙げて説明する。
本実施形態では、DP鋼のS-S曲線を、DP鋼に生じる物理現象に従って導出する。DP鋼のミクロ組織とS-S曲線は、異なる空間階層に属する。本実施形態では、空間階層間の物理現象の因果関係を一貫して論理的に説明する手法として均質化法を採用する場合を例に挙げて説明する。
均質化法を用いてミクロ組織の情報からS-S曲線を導出する手法の一例を説明する。
まず、DP鋼に与える外部歪(引張荷重となる外力)を設定する。そして、設定した外部歪をDP鋼に与えたときのミクロ組織の各位置xにおける応力σ(x)および歪ε(x)を弾塑性解析により導出する。ここでは、説明を簡単にするため、ミクロ組織の各位置xを、ミクロ組織の各ボクセル(の位置)xとする場合を例に挙げて説明する。
弾塑性解析では、外部歪に応じた各ボクセルの変位ut+1(x)が導出される。その後、歪と変位との関係式を用いて各ボクセルに変位ut+1(x)が生じたときの各ボクセルの歪εt+1(ut+1)(x)が導出される。更に、応力と歪の関係式を用いて各ボクセルに歪εt+1(ut+1)(x)が生じたときの各ボクセルの応力σt+1(εt+1(ut+1))(x)が導出される。
均質化法では、以下の(3)式に示す解析対象のDP鋼の歪エネルギーが最小になるように、各ボクセルにおける変位ut+1(x)が導出される。そして、導出した変位ut+1(x)から、歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)が導出される。(3)式は、DP鋼が従うべき物理現象を表す数式の一例である。
均質化法では、以下の(3)式に示す解析対象のDP鋼の歪エネルギーが最小になるように、各ボクセルにおける変位ut+1(x)が導出される。そして、導出した変位ut+1(x)から、歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)が導出される。(3)式は、DP鋼が従うべき物理現象を表す数式の一例である。

ここで、χt+1(x)は、位置xのボクセルにおける2値化ラベルの値である。ここでは、軟質相である場合の2値化ラベルの値χt+1(x)を「1」とする。硬質相である場合の2値化ラベルの値χt+1(x)を「0」とする。従って、位置xのボクセルが硬質相であることは、1-χt+1(x)で表される。CAは、軟質相が弾塑性変形する際の応力と歪との関係を示すコンプライアンス(テンソル)である。CBは、硬質相が弾塑性変形する際の応力と歪との関係を示すコンプライアンス(テンソル)である。ξt+1は、外部歪を表す。Ωは、解析対象のDP鋼の全領域を表す。:は、その前後のテンソル積をとることを表す。
(3)式の:の前の「(χt+1(x)CA+(1-χt+1(x))CB)(ξt+1+Δεt+1(u)(x))」は、外部歪ξt+1を与えたときに位置xのボクセルがu(x)だけ変位することにより当該ボクセルに生じる応力を表す。(3)式の:の後の「(ξt+1+Δεt+1(u)(x))」は、外部歪ξt+1を与えたときに位置xのボクセルがu(x)だけ変位することにより当該ボクセルに生じる歪を表す。これらのテンソル積は、位置xのボクセルにおける歪エネルギーになる。(3)式は、全てのボクセルにおける歪エネルギーを積算(積分)したものである。当該積算値が最小になるように、全ての位置xのボクセルの変位ut(x)が導出される。
以上のようにして歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)の組を導出することが、全ての位置xのボクセルについて行われる。
或る外部歪をDP鋼に与えた場合の、全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組が導出されると、当該全ての位置xのボクセルにおけるεt(ut)(x)および応力σt(εt(ut))(x)の代表値(例えば平均値)を導出する。これにより、或る外部歪をDP鋼に与えた場合のDP鋼の歪および応力の組が一組得られる。
以上のようにしてDP鋼の引張強さおよび均一伸びの代表値を導出することを、複数の外部歪をDP鋼に与えた場合のそれぞれについて実行する。これにより、DP鋼の歪および応力の組が複数得られる。これらの組から、応力と歪の関係式であるS-S曲線が得られる。
或る外部歪をDP鋼に与えた場合の、全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組が導出されると、当該全ての位置xのボクセルにおけるεt(ut)(x)および応力σt(εt(ut))(x)の代表値(例えば平均値)を導出する。これにより、或る外部歪をDP鋼に与えた場合のDP鋼の歪および応力の組が一組得られる。
以上のようにしてDP鋼の引張強さおよび均一伸びの代表値を導出することを、複数の外部歪をDP鋼に与えた場合のそれぞれについて実行する。これにより、DP鋼の歪および応力の組が複数得られる。これらの組から、応力と歪の関係式であるS-S曲線が得られる。
尚、以上のように、均質化法で導出されるのは、歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)である。歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)からS-S曲線が導出される。また、均質化法自体は、例えば、非特許文献2、3に記載のような公知の技術を用いることにより実現することができる。非特許文献2、3の内容を全てここに援用する。
[ミクロ組織の状態および遷移]
第2の因子の一例であるミクロ組織の状態と、第1の因子の一例であるミクロ組織の遷移の内容について説明する。
図3は、ミクロ組織の状態の遷移の一例を説明する図である。図3において、四角形は、ミクロ組織の画像を示す。図3では、63個のミクロ組織の画像0a~62aを示す。図4は、ミクロ組織の画像の一例を示す図である。図4では、表記の都合上、63個のミクロ組織の画像0a~62aのうち、15個のミクロ組織の画像0a~14aのみを示す。その他のミクロ組織の画像15a~62aの具体的な内容の表記を省略する。
第2の因子の一例であるミクロ組織の状態と、第1の因子の一例であるミクロ組織の遷移の内容について説明する。
図3は、ミクロ組織の状態の遷移の一例を説明する図である。図3において、四角形は、ミクロ組織の画像を示す。図3では、63個のミクロ組織の画像0a~62aを示す。図4は、ミクロ組織の画像の一例を示す図である。図4では、表記の都合上、63個のミクロ組織の画像0a~62aのうち、15個のミクロ組織の画像0a~14aのみを示す。その他のミクロ組織の画像15a~62aの具体的な内容の表記を省略する。
ミクロ組織の画像は、環境(environment)に対応する。ミクロ組織の状態は、マルコフ決定過程における状態(state)に対応する。図3に示す例では、状態sの有限集合Sは、S={s0,s2,・・・,s62}になる。ミクロ組織の状態を示す情報には、例えば、結晶粒の粒界および方位と、ミクロ組織における元素濃度の分布とが含まれる。本実施形態では、状態sの有限集合Sの各状態snには、その要素として、これらの情報が含まれるものとする。本実施形態では、ミクロ組織の画像0a~62aに、結晶粒の粒界および方位の情報と、ミクロ組織における元素濃度の分布の情報とが含まれているものとする。ミクロ組織の状態は、ミクロ組織のそれぞれに対して個別に定まる。
ミクロ組織の状態の遷移の内容には、「粗大化」、「微細化」、および「戻る」が含まれる。「粗大化」は、結晶成長が行われることを示す。「微細化」は、再結晶または相変態が行われることを示す。「戻る」は、1つ前の時刻tの状態に戻ることを示す。1つ前の時刻tの状態に対して「粗大化」された場合、「戻る」は、「微細化」することに対応する。1つ前の時刻tの状態に対して「微細化」された場合、「戻る」は、「粗大化」することに対応する。
図3および図4では、Cは、「粗大化」を示す。Mは、「微細化」を示す。Rは、「戻る」を示す。図3および図4において、Cの矢印線と対になっているRの矢印線は、「微細化」に対応する。Mの矢印線と対になっているRの矢印線は、「粗大化」に対応する。
時刻tにおいて、ミクロ組織の状態は、図3および図4に示す1つの矢印線で結ばれるとなりの状態にしか遷移しないものとする。例えば、時刻tにおいて、ミクロ組織の画像1aの状態は、ミクロ組織の画像0a、3a、4aの状態の何れか1つにしか遷移しない。例えば、時刻tにおいて、ミクロ組織の画像1aの状態は、ミクロ組織の画像3aを飛ばしてミクロ組織の画像7aの状態に遷移することはない。
ミクロ組織の画像0aの状態では、「戻る」が選択されることはない。ミクロ組織の画像0aの状態では、「粗大化」または「微細化」が選択される。ミクロ組織の画像31a~62aの状態では、「粗大化」および「微細化」が選択されることはない。ミクロ組織の画像31a~62aの状態では、「戻る」のみが選択される。
ミクロ組織の状態の遷移の内容は、マルコフ決定過程の行動(action)に対応する。ミクロ組織の画像0aの状態では、時刻tにおける行動aとして、「粗大化」または「微細化」が選択される。ミクロ組織の画像31a~62aの状態では、時刻tにおける行動aとして、「戻る」のみが選択される。その他のミクロ組織の画像1a~30aの状態では、時刻tにおける行動aとして、「粗大化」、「微細化」、または「戻る」が選択される。
このように、本実施形態では、マルコフ決定過程における時刻tに対応するものとして、ミクロ組織の状態の遷移の回数tを用いる。
このように、本実施形態では、マルコフ決定過程における時刻tに対応するものとして、ミクロ組織の状態の遷移の回数tを用いる。
図3および図4において、ミクロ組織の画像0a~62aのうち、ミクロ組織の画像0aは、入力画像である。ミクロ組織の画像0aは、例えば、DP鋼に対して、EBSD(Electron Backscattering Diffraction)法、光学顕微鏡、またはSEM(Scanning Electron Microscope)等の公知の計測技術を用いることにより得ることができる。従って、ここでは、その詳細な説明を省略する。ミクロ組織の画像は、3次元画像でも2次元画像でもよい。
ミクロ組織の画像1a~62aは、当該画像に向かって伸びるCの矢印線またはMの矢印線の始点に位置する画像のみに基づいて生成される。矢印線の始点は、矢印線の2つの端点のうちアローヘッドのない方の端点である。具体的には、例えば、ミクロ組織の画像1a、2aは、ミクロ組織の画像0aのみに基づいて生成される。ミクロ組織の画像3a、4aは、ミクロ組織の画像1aのみに基づいて生成される。
ミクロ組織の画像0a~62aの状態の遷移は、DP鋼に生じる物理現象に従って行われる。本実施形態では、Pottsモデルを用いたMonte Carlo法によるシミュレーションを行うことにより、ミクロ組織の画像1a~62aが生成される場合を例に挙げて説明する。
図5は、ミクロ組織の画像1a~62aの生成方法の一例を説明する図である。図5において、数値1~9は、結晶方位を示す値である。同じ数値は、結晶方位が同じであることを示す。また、図5において、線は、粒界を示す。また、数値が付されている位置は、格子点の位置である。格子点の位置は、例えば、EBSD法による測定で電子線が照射された位置に対応する。
ここでは、ミクロ組織の画像0aに基づいて、ミクロ組織の画像1a、2aを生成する場合を例に挙げて説明する。
シミュレーションは、以下の手順(A)~(G)によって行われる。ただし、ここでは、領域が有限であると仮定する。即ち、格子点の数は有限個である。
(A) 全ての格子点の中からランダムに一つの格子点iを選択する。
(B) 格子点iにおける方位Si(1≦Si≦Q)とは異なる方位Si’(1≦Si’≦Q)をランダムに選択する。
(C) エネルギーの差ΔE(=E(Si’)-E(Si))を導出する。
方位SiのエネルギーE(Si)は、以下の(4)式で表される。
シミュレーションは、以下の手順(A)~(G)によって行われる。ただし、ここでは、領域が有限であると仮定する。即ち、格子点の数は有限個である。
(A) 全ての格子点の中からランダムに一つの格子点iを選択する。
(B) 格子点iにおける方位Si(1≦Si≦Q)とは異なる方位Si’(1≦Si’≦Q)をランダムに選択する。
(C) エネルギーの差ΔE(=E(Si’)-E(Si))を導出する。
方位SiのエネルギーE(Si)は、以下の(4)式で表される。

δSiSjは、クロネッカーのデルタである。δSiSjは、Si=Sjなら1になり、Si≠Sjなら0になる。n.nは、格子点iの最近接近傍(nearest neiborhood)内の格子点を表す。Jpi,pjは、界面エネルギーの大きさを表す定数である。Jpi,pjは、0を上回る値である(Jpi,pj>0)。piは、母相(未再結晶領域)pmまたは新相(再結晶領域)pnを表す。Jpm,pmは、母相の結晶粒間の界面エネルギーを表す。Jpm,pn(=Jpn,pm)は、母相の結晶粒と新相の結晶粒との間の界面エネルギーを表す。Jpn,pnは、新相の結晶粒間の界面エネルギーを表す。Hは、格子点のエネルギーの大きさを表す定数である。Hは、0を上回る値である。θは、Heviside関数である。Quは、未再結晶の結晶粒の総数である。
(4)式の左辺第1項は、粒界エネルギーを表す。粒界エネルギーは、結晶粒の成長のための駆動力である。(4)式の左辺第1項は、粒界に近い格子点iであるほど、粒界エネルギーは大きくなることを示す。(4)式の左辺第2項は、格子点エネルギーを表す。格子点エネルギーは、核生成(Nucleation)のための駆動力である。格子点エネルギーは、格子点iが未再結晶領域にある場合に0を上回る値になり、格子点iが再結晶領域にある場合になる。
(4)式は、DP鋼が従うべき物理現象を表す数式の一例である。
(4)式は、DP鋼が従うべき物理現象を表す数式の一例である。
(D) エネルギーの差ΔEが0を下回る場合(ΔE<0の場合)、格子点iの方位Siを方位Si’に置き換える。エネルギーの差ΔEが0以上である場合(ΔE≧0の場合)、遷移確率W(=ΔE/kBT)で格子点iの方位Siを方位Si’に置き換える。ここで、kBは、ボルツマン定数である。Tは、温度である。温度Tは、予め設定されるものとする。
(E) 未選択の格子点の中からランダムに一つの格子点iを選択する。
(F) 手順(E)で選択した格子点iについて、手順(B)~(E)を行う。
(G) 手順(F)が終了した後、手順(A)および(E)で全ての格子点iが選択されるまで、手順(B)~(D)を行う。
(E) 未選択の格子点の中からランダムに一つの格子点iを選択する。
(F) 手順(E)で選択した格子点iについて、手順(B)~(E)を行う。
(G) 手順(F)が終了した後、手順(A)および(E)で全ての格子点iが選択されるまで、手順(B)~(D)を行う。
図6A~図6Dは、Pottsモデルを用いたMonte Carlo法によるシミュレーションを概念的に示す図である。ここでは、界面エネルギーJpm,pm、Jpm,pn、Jpn,pm、Jpn,pnは等しいものとする(Jpm,pm=Jpm,pn=Jpn,pm=Jpn,pn=J)。また、定数Hは2J未満(H<2J)であるとする。図6A~図6Dにおいて、グレーで示す領域は、再結晶領域(新相)を表す。その他の白の領域は、未再結晶領域(母相)を表す。また、1≦Si<Quは、格子点iが母相にあることを意味するものとする。Qu+1≦Si<Qは、格子点iが新相にあることを意味するものとする。
図6Aでは、格子点iとして格子点601が選択されていることを示す(手順(A)を参照)。格子点601の最近接近傍n.nの範囲として範囲602が設定される。格子点601の方位Siは6である。従って、図6Bに示すように、方位Si’として6とは異なる値rが選択される(手順(B)を参照)。この場合、(4)式より、E(Si)はHである。E(Si’)は6Jpm,pn(=6J)である。よって、エネルギーの差ΔEは、6J-Hになる(手順(C)を参照)。このエネルギーの差ΔEは、正の値(>0)である。従って、格子点601の方位Siは、遷移確率Wの確率で方位Si’に置き換わる(手順(D)を参照)。
図6Cでは、格子点iとして格子点603が選択されていることを示す(手順(A)を参照)。格子点603の最近接近傍n.nの範囲として範囲604が設定される。格子点603の方位Siは4である。従って、図6Dに示すように、方位Si’として4とは異なる値rが選択される(手順(B)を参照)。この場合、(4)式より、E(Si)はJpm,pn+3Jpm,pn+H(=4J+H)Hである。E(Si’)は6Jpm,pn(=6J)である。よって、エネルギーの差ΔEは、2J-Hになる(手順(C)を参照)。このエネルギーの差ΔEは、負の値(<0)である。従って、rの値が8である場合には、格子点603の方位Siは8に変更される(手順(D)を参照)。よって、方位が8の結晶粒が成長する。一方、rの値が8以外である場合には、格子点603の方位Siは、6および8以外の値に変更される(手順(D)を参照)。よって、核生成と共に、新相(新しい結晶粒)が生成される。
「粗大化」する場合と、「微細化」する場合とで、界面エネルギーJpm,pm、Jpm,pn、Jpn,pm、Jpn,pnおよび定数Hを異ならせて、ミクロ組織の画像0aに対して、以上のシミュレーションが行われる。そうすると、ミクロ組織の画像1a、2aが生成される。ミクロ組織の画像1a、2aを生成元のミクロ組織の画像として、以上のシミュレーションが行われることにより、ミクロ組織の画像3a~6aが生成される。ミクロ組織の画像3a~6aを生成元のミクロ組織の画像として、以上のシミュレーションが行われることにより、ミクロ組織の画像7a~14aが生成される。同様に、ミクロ組織の画像15a~30aおよびミクロ組織の画像31a~62aが生成される。以上のように本実施形態では、ミクロ組織の画像1a~62aを生成するための処理手順が遷移関数f(st+1|st,at)に対応する。
本実施形態では、ミクロ組織の画像0aは、硬質相を含まず軟質相のみであるものとする。従って、ミクロ組織の画像1a~62aも、硬質相を含まず軟質相のみとなる。軟質相のみのS-S曲線は、ミクロ組織の状態によって大きく異ならない。そこで、本実施形態では、ミクロ組織の画像0a~62aのそれぞれに対して、以上のシミュレーションを更に行うことにより、ミクロ組織の画像が、硬質相と軟質相とを含むものとする。当該ミクロ組織の画像は、相変態後のミクロ組織の画像である。本実施形態では、相変態が、オーステナイト変態であるものとする。相変態したオーステナイトの領域は、マルテンサイトのような硬質相に変化するものとする。
図7は、相変態後のミクロ組織の遷移の一例を説明する図である。図7は、図3に対応する図である。図3に示すミクロ組織の画像No(No=0a~62a)から、図7に示すミクロ組織の画像No(No=0b~62b)が生成される。例えば、図3に示すミクロ組織の画像0aから、図7に示すミクロ組織の画像0bが生成される。図8は、相変態後のミクロ組織の画像の一例を示す図である。図8は、図4に対応する図である。図8では、表記の都合上、63個のミクロ組織の画像0b~62bのうち、15個のミクロ組織の画像0b~14bのみを示す。その他のミクロ組織の画像15b~63bの内容の表記を省略する。
図8において、黒い領域は硬質相を示す。白い領域は軟質相を示す。相変態後のミクロ組織は、2値化画像であるものとする。例えば、硬質相の領域に対応するボクセル(またはピクセル)には、当該ボクセル(またはピクセル)が軟質相および硬質相の何れであるかを示す2値化ラベルが与えられる。
図7および図8に示すミクロ組織の画像0b~62bを生成する際には、格子点iの方位Siを示す値を変更する場合に、当該値を変更する領域において、前述したように、オーステナイト相への相変態が起こるものとし、相変態したオーステナイトは急速冷却され硬質相(マルテンサイト)になるものとする。即ち、当該値を変更する領域において、硬質相が新相(新しい結晶粒)として生成される。本実施形態では、ミクロ組織の画像0b~62bを用いて前述したようにしてS-S曲線が導出される。ミクロ組織の画像0b~62bに含まれる硬質相の割合が異なると、それぞれのS-S曲線を公平に評価することができない。そこで、ミクロ組織の画像0b~62bに含まれる硬質相(マルテンサイト)の割合が同じになるようにする。例えば、ミクロ組織の画像0b~62bが3次元画像である場合には、ミクロ組織の画像0b~62bに含まれる硬質相の体積割合を同じにする。ミクロ組織の画像0b~62bが2次元画像である場合には、ミクロ組織の画像0b~62bに含まれる硬質相の面積割合を同じにする。硬質相の体積割合および面積割合として、例えば30%を採用することができる。
Pottsモデルを用いたMonte Carlo法によるシミュレーション自体は、例えば、非特許文献4に記載のような公知の技術を用いることにより実現することができる。非特許文献4の内容を全てここに援用する。
[学習モデル]
図9は、所望の機械特性を有するDP鋼を探索する方法の一例を説明する図である。
図9において、ミクロ組織の初期画像901は、例えば、図3および図4に示したミクロ組織の画像0aに対応する。ミクロ組織の初期画像901は、時刻t=0における状態s0に対応する。ミクロ組織の初期画像901に対してエージェントがとる行動a0を決定する方策π(s0)が与えられ、当該方策に従う行動a0を起こす。行動a0は、「粗大化」および「微細化」の何れかである。そうすると、遷移関数f(s1|s0,a0)により、状態s0は、次の時刻t=1における状態s1に遷移する。図3および図4に示す例では、遷移先のミクロ組織の画像902は、ミクロ組織の画像1aまたは2aである。遷移は、マルコフ性を満たすように行われる。従って、1つ先の時刻t+1における状態St+1の条件付き確率分布は、現在の時刻tにおける状態Stにのみ依存する。このことは、図3および図4において、ミクロ組織の画像1a~62aが、当該画像に向かって伸びるCの矢印線またはMの矢印線の始点に位置する画像のみに基づいて生成されることに対応する。
図9は、所望の機械特性を有するDP鋼を探索する方法の一例を説明する図である。
図9において、ミクロ組織の初期画像901は、例えば、図3および図4に示したミクロ組織の画像0aに対応する。ミクロ組織の初期画像901は、時刻t=0における状態s0に対応する。ミクロ組織の初期画像901に対してエージェントがとる行動a0を決定する方策π(s0)が与えられ、当該方策に従う行動a0を起こす。行動a0は、「粗大化」および「微細化」の何れかである。そうすると、遷移関数f(s1|s0,a0)により、状態s0は、次の時刻t=1における状態s1に遷移する。図3および図4に示す例では、遷移先のミクロ組織の画像902は、ミクロ組織の画像1aまたは2aである。遷移は、マルコフ性を満たすように行われる。従って、1つ先の時刻t+1における状態St+1の条件付き確率分布は、現在の時刻tにおける状態Stにのみ依存する。このことは、図3および図4において、ミクロ組織の画像1a~62aが、当該画像に向かって伸びるCの矢印線またはMの矢印線の始点に位置する画像のみに基づいて生成されることに対応する。
ミクロ組織の初期画像901からミクロ組織の画像902にミクロ組織の画像が遷移すると、ミクロ組織の画像902から、相変態後のミクロ組織の画像903が生成される。ミクロ組織の画像902がミクロ組織の画像1aである場合、相変態後のミクロ組織の画像1bが生成される。相変態後のミクロ組織の画像903からS-S曲線202が導出される。
目標S-S曲線201とS-S曲線202との差が所定の範囲内であるか否かによって、報酬関数r(即時報酬)の値は異なる。本実施形態では、目標S-S曲線201とS-S曲線202との差が所定の範囲内でない場合、報酬関数r(即時報酬)の値は0とする。目標S-S曲線201とS-S曲線202との差が所定の範囲内になる場合、報酬関数r(即時報酬)の値は1とする。目標S-S曲線201をσ*とし、S-S曲線202をσsとする。目標S-S曲線201とS-S曲線202との距離を数値化した指標をd(σ*,σs)とする。当該指標として、例えば、ユークリッドノルムを用いる。目標S-S曲線201とS-S曲線202との距離に対する閾値をεとする。そうすると、報酬関数r(st,at,st+1)は、以下の(5)式で表される。

図9に示す例では、目標S-S曲線201に対する所定の範囲を破線で示す。従って、目標S-S曲線201と、相変態後のミクロ組織の画像1bから導出されるS-S曲線202との差は所定の範囲内でない。よって、報酬関数r(s0,a0,s1)は0になる。
その後、ミクロ組織の画像902を遷移元のミクロ組織の画像として、報酬関数r(s2,a1,s2)を導出する。そして、報酬関数rの積算値(=r(s0,a0,s1)+r(s2,a1,s2))を累積報酬として導出する。
その後、ミクロ組織の画像902を遷移元のミクロ組織の画像として、報酬関数r(s2,a1,s2)を導出する。そして、報酬関数rの積算値(=r(s0,a0,s1)+r(s2,a1,s2))を累積報酬として導出する。
以上のようにして、目標S-S曲線201とS-S曲線202との差が所定の範囲内になるまで、マルコフ性を満たすように、遷移元のミクロ組織の画像を順次異ならせる。図9では、状態STにおいて、目標S-S曲線201とS-S曲線202との差が所定の範囲内になることを示す。本実施形態では、このときに即時報酬(報酬関数r(sT-1,aT-1,sT))は(5)式に従い、1になる。
このように、累積報酬が最大になるミクロ組織の画像を探索する。本実施形態では、即時報酬が1になるミクロ組織の画像904を探索する。従って、累積報酬が最大になるミクロ組織の画像904を探索することは、報酬関数r(st-1,at-1,st)が1になるミクロ組織の画像を探索することと同じである。尚、図9では、即時報酬が1になるミクロ組織の画像904から、相変態後のミクロ組織の画像905が生成される。
ミクロ組織の初期画像901と、即時報酬が1になるミクロ組織の画像904と、ミクロ組織の初期画像901から即時報酬が1になるミクロ組織の画像904に至るまでの行動atを、当該行動をとった順に並べた情報と、を含む情報を生成する。以下の説明では、この情報を、必要に応じて、製造工程情報と称する。
ミクロ組織の初期画像901と、即時報酬が1になるミクロ組織の画像904と、ミクロ組織の初期画像901から即時報酬が1になるミクロ組織の画像904に至るまでの行動atを、当該行動をとった順に並べた情報と、を含む情報を生成する。以下の説明では、この情報を、必要に応じて、製造工程情報と称する。
ミクロ組織の画像に対して「粗大化」および「微細化」を行うことは、熱処理工程における熱処理条件を設定することに対応する。従って、製造工程情報は、所望のS-S曲線を有するDP鋼を製造するための温度制御の条件の指針となる情報になる。例えば、ミクロ組織の初期画像901が図3に示すミクロ組織の画像0aであるとする。即時報酬が1になるミクロ組織の画像が図3に示すミクロ組織の画像46aであるとする。ミクロ組織の画像0aからミクロ組織の画像46aに至るまでに、遷移元のミクロ組織の画像が0a→1a→4a→10a→22aの順で遷移したとする。この場合、「粗大化」→「微細化」→「微細化」→「微細化」→「微細化」となるような熱処理条件とすればよいことが分かる。図10に、ミクロ組織の画像0aからミクロ組織の画像46aに至る過程を示す。このようにして方策πの1つが探索される。
本実施形態では、最適な方策*を導出するために、学習モデルを用いる。当該学習モデルは、ミクロ組織の初期状態が与えられた場合に、即時報酬が1になるミクロ組織の状態を探索するためのものである。学習モデルは、強化学習を行うことにより作成される。本実施形態では、強化学習の一例としてQ学習を用いる場合を例に挙げる。
最適な方策*を導出するための手順について説明する。(1)式を基に、行動価値関数Qπ(s,a)を以下の(6)式のように定義する。尚、ここでは、状態sのときに方策π(s)をとった場合の即時報酬をr(s,π(s))と表記する。また、状態sのときに方策π(s)をとる場合の遷移関数をf(s,π(s)と表記する。

行動価値関数Qπ(s,a)を最大にする最適行動価値関数Q*(s,a)を以下の(7)式のように定義する。ここで、方策の集合Mは、以下の(8)式のように定義される。

Sは、状態sの有限集合である。図3に示す例では、状態sの数は63個である(ミクロ組織の画像0a~62a)。即ち、状態sの有限集合S(={s1,s2,・・・,sN})のNは63である。Aは、行動aの有限集合である。図3に示す例では、行動aの数は3個である(「粗大化」、「微細化」、「戻る」)。即ち、行動aの有限集合A(={a1,a2,・・・,aK})のKは3である。(7)式に(6)式を代入すると、以下の(9)式が得られる。

(9)式は、Bellman方程式と呼ばれる。ここで、s’=f(s,a)である。最適行動価値関数Q*に作用する関数F:F→Fを以下の(10)式のように定義すると、(8)式のBellman方程式は、以下の(11)式のように表される。

(11)式は、不動点Q*を決定する問題である。(11)式の求解アルゴリズムとして、例えば、Mann iterationを用いることができる。この場合、以下の(12)式により、不動点に収束する。kは、最適な方策π*が得られるまでの方策πの試行回数であり、正の整数である。

(12)式では、解の探索空間が∀(s,a)である。Q学習では、以下の(13)式の関係を満たす範囲に解の探索空間が限定される。

(13)式の条件を付与して(12)式の解を導出することによりQテーブルが作成される。Qテーブルは、状態sの有限集合Sの要素(状態s)と、行動aの有限集合Aの要素(行動a)との組(s,a)∈S×AからなるS×Aのサイズの行列である。Qテーブルの各要素には、Q値が設定される。
図11Aは、初期のQテーブルの一例を示す図である。本実施形態では、行動aは、「粗大化a1」、「微細化a2」、および「戻るa3」である。状態sは、ミクロ組織の画像0a~62aの状態である。従って、Qテーブルは、63行3列の行列である。図11Aにおいて、状態として付している番号は、図3に示すミクロ組織の画像0a~62aに対応する。例えば、図11Aにおいて、状態0は、図3に示すミクロ組織の画像0aの状態に対応する。また、図3に示す例では、ミクロ組織の画像0aに対して「戻るa3」を選択することができない。よって、Qテーブルの状態0(1行目)の「戻る」のQ値は0で固定される。ミクロ組織の画像31a~62aに対して「粗大化a1」および「微細化a2」を選択することができない。よって、Qテーブルの状態31~62(32行目~61行目)の「粗大化a1」および「微細化a2」のQ値は0で固定される。
試行回数kが0(k=0)で、Qテーブルが初期化される。本実施形態では、0以上1以下の範囲の一様乱数により、初期のQテーブルの各要素のQ値(Q(s,a))が設定される。
試行回数k(k>0)において、試行回数k-1で導出されたQテーブルを用いる。試行回数kが1の場合、初期のQテーブルを用いる。試行回数k-1で導出されたQテーブルにおいて、Q値(Q(s’,a1)、Q(s’,a2)、Q(s’,a3))を参照する。s’は、遷移後の状態である。本実施形態では、図3に示すように状態sが遷移するため、遷移後の状態s’は定まる。a1、a2、a3は、行動aの有限集合Aの要素である。ここでは、a1は「粗大化」を示す。a2は「微細化」を示す。a3は「戻る」を示す。Q値(Q(s’,a1)、Q(s’,a2)、Q(s’,a3))は、Q値(Q(s,a1)、Q(s,a2)、Q(s,a3))のうち最大の値に基づいて定められる。
例えば、ミクロ組織の初期画像901がミクロ組織の画像0aであるとする。状態0(1行目)のQ値(Q(0,a1)、Q(0,a2)、Q(0,a3))の中で最大の値は、Q(0,a2)である。この場合、図3より、遷移後の状態s’は、状態1(ミクロ組織の画像2a)である。従って、図11Aの状態2(3行目)のQ値(Q(2,a1)、Q(2,a2)、Q(2,a3))を参照する。
次に、(10)式に従い、Q値(Q(s’,a1)、Q(s’,a2)、Q(s’,a3))の中で最大のQ値をFQk(s,a)として(12)式に従い、Q値を更新する。例えば、状態0(1行目)のQ値(Q(0,a1)、Q(0,a2)、Q(0,a3))の中で最大の値は、Q(0,a2)である。この場合、状態0の次の状態は、状態0(ミクロ組織の画像0a)に対して「微細化」を行うことにより遷移する状態2(ミクロ組織の画像2a)になる。この場合、Q値(Q(0,a2))が更新の対象になる。
また、Q値(Q(2,a1)、Q(2,a2)、Q(2,a3))の中で最大の値は、Q(2,a3)である。この場合、Q値(Q(2,a3))をFQk(s,a)として(12)式の計算を行うことにより、試行回数k+1におけるQ値(Qk+1(0,a2))が導出される。このようにして導出されたQ値にQ値(Q(0,a2))の値は更新される。
以上のようにしてQテーブルのQ値を更新することを、即時報酬が1になるミクロ組織の画像が得られるまで繰り返し行う。即時報酬が1になるミクロ組織の画像が得られた場合、当該ミクロ組織の画像の状態に対応するQテーブルのQ値(Q(s,a))は、以下のようにして更新される。(10)式の右辺第1項(即時報酬r(s,a))は1とする。(10)式の右辺第2項は0とする。このようにして得られたFQk(s,a)を用いて(12)式の計算を行うことにより、Q値(Qk+1(s,a))が導出される。このようにして導出されたQ値にQ値(Q(s,a))の値は更新される。図10に示す例では、状態46(47行目)のQ値(Q(46,a1)の値が更新される。
以上のようにして、即時報酬が1になるミクロ組織の画像が得られるまでQテーブルのQ値を更新することにより1回の学習(試行回数kの試行)が終了する。1回の学習が終了した時点でのQテーブルを用いて、前述したのと同じようにしてQテーブルの更新が行われ、次の学習(試行回数k+1の試行)が終了する。尚、各学習において、ミクロ組織の初期画像901は固定(図3に示す例ではミクロ組織の画像0a)される。所定の収束条件を満たすまで、このような学習を繰り返し行う。
図12は、学習が収束する様子の一例を示す図である。図12において、行動の回数は、即時報酬が1になるミクロ組織の画像が得られるまでの行動(状態の遷移)の回数である。例えば、1回目の学習では、180回程度の行動を行うことにより、即時報酬が1になるミクロ組織の画像が得られたことを示す。学習の回数が120回程度になると、行動の回数は5回に収束する。所定の収束条件として、例えば、所定の回数の学習を行っても、学習の結果(製造工程情報)が変化しないことを用いることができる。
以上のようにしてQテーブルが作成される。図11Bは、学習後のQテーブルの一例を示す図である。
以上のようにしてQテーブルが作成される。図11Bは、学習後のQテーブルの一例を示す図である。
[解析装置1300]
以上で、因子に関する説明を終える。本実施形態では、各因子に関する技術を用いて解析装置1300を構成する。以下、本実施形態の解析装置1300の一例を説明する。図13は、解析装置1300の機能的な構成の一例を示す図である。
以上で、因子に関する説明を終える。本実施形態では、各因子に関する技術を用いて解析装置1300を構成する。以下、本実施形態の解析装置1300の一例を説明する。図13は、解析装置1300の機能的な構成の一例を示す図である。
<情報取得部1310>
情報取得部1310は、解析対象であるDP鋼のミクロ組織の初期画像901と、目標S-S曲線201の情報とを取得する。作成部1320に対して出力される、ミクロ組織の初期画像901および目標S-S曲線201の情報と、推定部1340に対して出力される、ミクロ組織の初期画像901および目標S-S曲線201の情報は異なる。作成部1320に対して出力される、ミクロ組織の初期画像901および目標S-S曲線201の情報は、Qテーブルを作成するためのものである。推定部1340に対して出力される、ミクロ組織の初期画像901および目標S-S曲線201の情報は、ミクロ組織の推定対象のDP鋼に対するものである。ミクロ組織の初期画像901および目標S-S曲線201の情報の取得は、例えば、外部装置との通信により行われる。
情報取得部1310は、解析対象であるDP鋼のミクロ組織の初期画像901と、目標S-S曲線201の情報とを取得する。作成部1320に対して出力される、ミクロ組織の初期画像901および目標S-S曲線201の情報と、推定部1340に対して出力される、ミクロ組織の初期画像901および目標S-S曲線201の情報は異なる。作成部1320に対して出力される、ミクロ組織の初期画像901および目標S-S曲線201の情報は、Qテーブルを作成するためのものである。推定部1340に対して出力される、ミクロ組織の初期画像901および目標S-S曲線201の情報は、ミクロ組織の推定対象のDP鋼に対するものである。ミクロ組織の初期画像901および目標S-S曲線201の情報の取得は、例えば、外部装置との通信により行われる。
<作成部1320、記憶部1330>
作成部1320は、Qテーブルを作成する。作成部1320は、状態導出部1321、報酬導出部1322、学習部1323、目標判定部1324、決定部1325、および収束判定部1326を有する。記憶部1330には、Qテーブルが記憶される。Qテーブルは、学習モデルの一例である。ここでは、初期のQテーブルが記憶部1330に予め記憶されているものとして説明を行う。
作成部1320は、Qテーブルを作成する。作成部1320は、状態導出部1321、報酬導出部1322、学習部1323、目標判定部1324、決定部1325、および収束判定部1326を有する。記憶部1330には、Qテーブルが記憶される。Qテーブルは、学習モデルの一例である。ここでは、初期のQテーブルが記憶部1330に予め記憶されているものとして説明を行う。
<<状態導出部1321>>
状態導出部1321は、第1の導出部である。状態導出部1321は、処理対象のミクロ組織の画像を設定する。1回目の設定では、状態導出部1321は、情報取得部1310から出力されたミクロ組織の初期画像901を、処理対象のミクロ組織の画像として設定する。2回目以降の設定では、状態導出部1321は、直近の処理対象のミクロ組織の画像に対する遷移後のミクロ組織の画像を、処理対象のミクロ組織の画像として設定する。
状態導出部1321は、第1の導出部である。状態導出部1321は、処理対象のミクロ組織の画像を設定する。1回目の設定では、状態導出部1321は、情報取得部1310から出力されたミクロ組織の初期画像901を、処理対象のミクロ組織の画像として設定する。2回目以降の設定では、状態導出部1321は、直近の処理対象のミクロ組織の画像に対する遷移後のミクロ組織の画像を、処理対象のミクロ組織の画像として設定する。
状態導出部1321は、マルコフ決定過程におけるエージェントに対応する。状態導出部1321は、学習中のQテーブルを参照して、処理対象のミクロ組織の画像に対する状態の遷移の内容(行動)を導出する。これにより、処理対象のミクロ組織の画像の次の状態が定まる。ミクロ組織の画像は、逆問題における原因に対応する。状態の遷移の内容(行動)は、「粗大化」、「微細化」、および「戻る」の何れかである。本実施形態では、ミクロ組織の画像の状態が図3に示すようにして遷移することが予め定められているものとする。従って、ミクロ組織の画像0aの状態では、「戻る」が導出されることはない。ミクロ組織の画像31a~62aの状態では、「粗大化」および「微細化」が導出されることはない。
また、本実施形態では、作成部1320においては、ミクロ組織の画像0aがミクロ組織の初期画像901として用いられるものとする。また、本実施形態では、ミクロ組織の画像0a以外のミクロ組織の画像1a~62aは、状態導出部1321で都度導出されるものとする。ただし、ミクロ組織の画像1a~62aは、予め導出されて記憶部1330に記憶されていてもよい。この場合、状態導出部1321は、ミクロ組織の画像1a~62aを検索することにより、ミクロ組織の画像1a~62aを導出する。
例えば、図11Aにおいて、状態0(1行目)のQ値(Q(0,a1)、Q(0,a2)、Q(0,a3))の中で最大の値は、Q(0,a1)である。この場合、状態0(ミクロ組織の画像0a)に対する状態の遷移の内容(行動)は、「粗大化」になる。
状態導出部1321は、以上のようにして導出した状態の遷移の内容(行動)に従って処理対象のミクロ組織の画像の状態を遷移させる。これにより、遷移後のミクロ組織の画像が導出される。状態導出部1321は、例えば、状態0(ミクロ組織の画像0a)に対して「粗大化」を行うことにより遷移する状態1(ミクロ組織の画像1a)を導出する。本実施形態では、状態導出部1321は、Pottsモデルを用いたMonte Carlo法によるシミュレーションを行うことにより、ミクロ組織の画像を導出する。
状態導出部1321は、以上のようにして導出したミクロ組織の画像から、相変態後のミクロ組織の画像を導出する。状態導出部1321は、例えば、ミクロ組織の画像1aから、相変態後のミクロ組織の画像1bを導出する。本実施形態では、相変態後のミクロ組織の画像0b~62bは、状態導出部1321で都度導出されるものとする。ただし、相変態後のミクロ組織の画像0b~62bは、予め導出されて記憶部1330に記憶されていてもよい。状態導出部1321は、尚、状態導出部1321は、相変態後のミクロ組織の画像0b~62bを検索することにより、相変態後のミクロ組織の画像0b~62bを導出する。例えば、ミクロ組織の初期画像901の相変態後のミクロ組織の画像を、ミクロ組織の初期画像901が入力された時点で導出する。本実施形態では、状態導出部1321は、Pottsモデルを用いたMonte Carlo法によるシミュレーションを行うことにより、相変態後のミクロ組織の画像を導出する。
<<報酬導出部1322>>
報酬導出部1322は、第2の導出部である。報酬導出部1322は、相変態後のミクロ組織の画像からS-S曲線を導出する。本実施形態では、報酬導出部1322は、均質化法を用いてS-S曲線202を導出する。S-S曲線は、逆問題における結果に対応する。本実施形態では、S-S曲線は、報酬導出部1322で都度導出されるものとする。ただし、S-S曲線は、予め導出されて記憶部1330に記憶されていてもよい。この場合、報酬導出部1322は、S-S曲線を検索することにより、S-S曲線を導出する。
報酬導出部1322は、第2の導出部である。報酬導出部1322は、相変態後のミクロ組織の画像からS-S曲線を導出する。本実施形態では、報酬導出部1322は、均質化法を用いてS-S曲線202を導出する。S-S曲線は、逆問題における結果に対応する。本実施形態では、S-S曲線は、報酬導出部1322で都度導出されるものとする。ただし、S-S曲線は、予め導出されて記憶部1330に記憶されていてもよい。この場合、報酬導出部1322は、S-S曲線を検索することにより、S-S曲線を導出する。
<<学習部1323>>
学習部1323は、Qテーブルの要素のうち、処理対象のミクロ組織の画像に対応する状態(行)と、状態導出部1321により導出された状態の遷移の内容に対応する行動(列)とにより定まる要素のQ値を更新する。このとき、学習部1323は、Qテーブルの要素のうち、状態導出部1321により導出されたミクロ組織の画像に対応する状態(行)により定まる要素のQ値の最大値をFQk(s,a)として(12)式の計算を行うことにより、更新後のQ値を導出する。
学習部1323は、Qテーブルの要素のうち、処理対象のミクロ組織の画像に対応する状態(行)と、状態導出部1321により導出された状態の遷移の内容に対応する行動(列)とにより定まる要素のQ値を更新する。このとき、学習部1323は、Qテーブルの要素のうち、状態導出部1321により導出されたミクロ組織の画像に対応する状態(行)により定まる要素のQ値の最大値をFQk(s,a)として(12)式の計算を行うことにより、更新後のQ値を導出する。
例えば、状態導出部1321によりミクロ組織の画像0aからミクロ組織の画像1aが導出されたとする。また、Q値(Q(1,a1)、Q(1,a2)、Q(1,a3))の中で最大の値は、Q(1,a2)である。この場合、Q値(Q(1,a2))をFQk(s,a)として(12)式の計算を行うことにより、更新後のQ値(Qk+1(0,a1))が導出される。
<<目標判定部1324>>
目標判定部1324は、目標S-S曲線201と、報酬導出部1322により導出されたS-S曲線202との差が所定の範囲内であるか否かを判定する。本実施形態では、目標判定部1324は、目標S-S曲線201とS-S曲線202との距離を数値化した指標d(σ*,σs)が閾値εを下回るか否かを判定する。
目標判定部1324は、目標S-S曲線201と、報酬導出部1322により導出されたS-S曲線202との差が所定の範囲内であるか否かを判定する。本実施形態では、目標判定部1324は、目標S-S曲線201とS-S曲線202との距離を数値化した指標d(σ*,σs)が閾値εを下回るか否かを判定する。
目標判定部1324による判定の結果、目標S-S曲線201と、報酬導出部1322により導出されたS-S曲線202との差が所定の範囲内でないとする。この場合、状態導出部1321は、状態導出部1321は、ミクロ組織の画像の遷移の回数tを更新して、処理対象のミクロ組織の画像を再設定する。前述したように、状態導出部1321は、処理対象のミクロ組織の画像の状態を遷移させたミクロ組織の画像を、処理対象のミクロ組織の画像として再設定する。例えば、ミクロ組織の画像0aからミクロ組織の画像1aが導出されたとする。この場合、状態導出部1321は、ミクロ組織の画像1aを処理対象のミクロ組織の画像として再設定する。
状態導出部1321、報酬導出部1322、学習部1323、および目標判定部1324は、目標S-S曲線201とS-S曲線202との差が所定の範囲内になるまで、再設定された処理対象のミクロ組織の画像に対して、以上の処理を繰り返し行う。
<<決定部1325>>
決定部1325は、目標判定部1324により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定されると起動する。決定部1325は、目標判定部1324により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定された時点における処理対象のミクロ組織の画像から特定されるミクロ組織の状態を、目標S-S曲線201を実現するミクロ組織の状態として決定する。以下の説明では、目標判定部1324により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定された時点における処理対象のミクロ組織の画像を、必要に応じて、ミクロ組織の最終画像と称する。図10に示す例では、ミクロ組織の画像46aがミクロ組織の最終画像である。
決定部1325は、目標判定部1324により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定されると起動する。決定部1325は、目標判定部1324により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定された時点における処理対象のミクロ組織の画像から特定されるミクロ組織の状態を、目標S-S曲線201を実現するミクロ組織の状態として決定する。以下の説明では、目標判定部1324により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定された時点における処理対象のミクロ組織の画像を、必要に応じて、ミクロ組織の最終画像と称する。図10に示す例では、ミクロ組織の画像46aがミクロ組織の最終画像である。
決定部1325は、目標S-S曲線201を実現する製造工程情報を生成する。前述したように、製造工程情報は、ミクロ組織の初期画像901と、ミクロ組織の最終画像と、ミクロ組織の初期画像901から、ミクロ組織の最終画像に至るまでの状態の遷移の内容(行動)を、当該遷移を行った順に並べた情報とを含む。図10に示す例では、ミクロ組織の画像0aからミクロ組織の画像46aに至るまで、「粗大化」、「微細化」、「微細化」、「微細化」をこの順で行うことを示す情報が製造工程情報になる。このように決定部1325は、ミクロ組織の初期画像901から、ミクロ組織の最終画像に至るまでの状態の遷移の内容(行動)を決定する。
<<収束判定部1326>>
収束判定部1326は、決定部1325により、ミクロ組織の最終画像が決定されると起動する。決定部1325によりミクロ組織の最終画像が決定されるタイミングで、Qテーブルの1回の学習が終了する。収束判定部1326は、所定の収束条件を満たすか否かを判定する。前述したように、所定の収束条件として、所定の回数の学習を行っても、学習の結果(製造工程情報)が変化しないことを用いることができる。所定の回数を大きくすれば、Qテーブルの信頼性が高くなる。ただし、所定の回数を大きくし過ぎると、計算時間が長くなる。所定の回数は、例えば、このような観点から定めることができる。
収束判定部1326は、決定部1325により、ミクロ組織の最終画像が決定されると起動する。決定部1325によりミクロ組織の最終画像が決定されるタイミングで、Qテーブルの1回の学習が終了する。収束判定部1326は、所定の収束条件を満たすか否かを判定する。前述したように、所定の収束条件として、所定の回数の学習を行っても、学習の結果(製造工程情報)が変化しないことを用いることができる。所定の回数を大きくすれば、Qテーブルの信頼性が高くなる。ただし、所定の回数を大きくし過ぎると、計算時間が長くなる。所定の回数は、例えば、このような観点から定めることができる。
収束判定部1326により、所定の収束条件を満たさないと判定されたとする。この場合、状態導出部1321は、処理対象のミクロ組織の画像を、ミクロ組織の初期画像901に戻す。状態導出部1321、報酬導出部1322、学習部1323、目標判定部1324、決定部1325、および収束判定部1326は、所定の収束条件を満たすまで、以上の処理を繰り返し行う。記憶部1330に記憶されているQテーブルの更新(学習)は、収束判定部1326により所定の収束条件を満たすと判定されたタイミングで終了する。記憶部1330は、学習が終了したQテーブルを記憶する。
<推定部1340>
推定部1340は、学習後のQテーブルを用いて、ミクロ組織の初期画像901からミクロ組織の最終画像に至るまでの遷移の内容(行動)を推定する。推定部1340は、状態導出部1341、報酬導出部1342、目標判定部1343、および決定部1344を有する。
推定部1340は、学習後のQテーブルを用いて、ミクロ組織の初期画像901からミクロ組織の最終画像に至るまでの遷移の内容(行動)を推定する。推定部1340は、状態導出部1341、報酬導出部1342、目標判定部1343、および決定部1344を有する。
<<状態導出部1341>>
状態導出部1341は、第1の導出部である。状態導出部1341は、状態導出部1321と同じ機能を有する。従って、状態導出部1341の機能の詳細な説明を省略する。ただし、推定部1340においては、ミクロ組織の初期画像901および目標S-S曲線201の情報として、ミクロ組織の推定対象のDP鋼に対するものが用いられる。ミクロ組織の初期画像901は、ミクロ組織の画像0aに限定されない。ミクロ組織の初期画像901は、ミクロ組織の画像0a~62aの何れであってもよい。また、状態導出部1341は、学習後のQテーブルを参照して、処理対象のミクロ組織の画像に対する状態の遷移の内容(行動)を導出する。
状態導出部1341は、第1の導出部である。状態導出部1341は、状態導出部1321と同じ機能を有する。従って、状態導出部1341の機能の詳細な説明を省略する。ただし、推定部1340においては、ミクロ組織の初期画像901および目標S-S曲線201の情報として、ミクロ組織の推定対象のDP鋼に対するものが用いられる。ミクロ組織の初期画像901は、ミクロ組織の画像0aに限定されない。ミクロ組織の初期画像901は、ミクロ組織の画像0a~62aの何れであってもよい。また、状態導出部1341は、学習後のQテーブルを参照して、処理対象のミクロ組織の画像に対する状態の遷移の内容(行動)を導出する。
本実施形態では、状態導出部1341も、状態導出部1321と同様に、ミクロ組織の画像および相変態後のミクロ組織の画像を都度導出するものとする。ただし、ミクロ組織の画像および相変態後のミクロ組織の画像は、予め導出されて記憶部1330に記憶されていてもよい。状態導出部1341は、マルコフ決定過程におけるエージェントに対応する。
<<報酬導出部1342>>
報酬導出部1342は、第2の導出部である。報酬導出部1342は、報酬導出部1322と同じ機能を有する。報酬導出部1342は、相変態後のミクロ組織の画像から、均質化法を用いて、S-S曲線を導出する。本実施形態では、報酬導出部1342も、報酬導出部1322と同様に、S-S曲線を都度導出するものとする。ただし、S-S曲線は、予め導出されて記憶部1330に記憶されていてもよい。
報酬導出部1342は、第2の導出部である。報酬導出部1342は、報酬導出部1322と同じ機能を有する。報酬導出部1342は、相変態後のミクロ組織の画像から、均質化法を用いて、S-S曲線を導出する。本実施形態では、報酬導出部1342も、報酬導出部1322と同様に、S-S曲線を都度導出するものとする。ただし、S-S曲線は、予め導出されて記憶部1330に記憶されていてもよい。
<<目標判定部1343>>
目標判定部1343は、目標判定部1324と同じ機能を有する。目標判定部1343は、目標S-S曲線201と、報酬導出部1342により導出されたS-S曲線202との差が所定の範囲内であるか否かを判定する。
目標判定部1343は、目標判定部1324と同じ機能を有する。目標判定部1343は、目標S-S曲線201と、報酬導出部1342により導出されたS-S曲線202との差が所定の範囲内であるか否かを判定する。
目標判定部1343よる判定の結果、目標S-S曲線201と、報酬導出部1342により導出されたS-S曲線202との差が所定の範囲内でないとする。この場合、状態導出部1341は、処理対象のミクロ組織の画像を再設定する。状態導出部1341は、状態導出部1321と同様に、直近の処理対象のミクロ組織の画像の状態を遷移させたミクロ組織の画像を、処理対象のミクロ組織の画像として再設定する。
状態導出部1341、報酬導出部1342、および目標判定部1343は、目標S-S曲線201とS-S曲線202との差が所定の範囲内になるまで、再設定された処理対象のミクロ組織の画像に対して、以上の処理を繰り返し行う。
<<決定部1344>>
決定部1344は、目標判定部1343により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定されると起動する。決定部1344は、決定部1325の機能と同じ機能を有する。ミクロ組織の最終画像は、目標判定部1343により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定された時点における処理対象のミクロ組織の画像である。
決定部1344は、目標判定部1343により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定されると起動する。決定部1344は、決定部1325の機能と同じ機能を有する。ミクロ組織の最終画像は、目標判定部1343により、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定された時点における処理対象のミクロ組織の画像である。
決定部1344は、目標S-S曲線201を実現する製造工程情報を導出する。前述したように、製造工程情報は、ミクロ組織の初期画像901と、ミクロ組織の最終画像と、ミクロ組織の初期画像901から、ミクロ組織の最終画像に至るまでの状態の遷移の内容(行動)を、当該遷移を行った順に並べた情報とを含む。このように決定部1325は、ミクロ組織の初期画像901から、ミクロ組織の最終画像に至るまでの状態の遷移の内容(行動)を決定する。
<出力部1350>
出力部1350は、決定部1344により製造工程情報が導出されると、当該製造工程情報を出力する。情報の出力の形態としては、例えば、コンピュータディスプレイへの表示、解析装置1300の内部または外部の記憶媒体への記憶、および外部装置への送信のうち、少なくとも1つを採用することができる。出力部1350による出力される製造工程情報は、目標S-S曲線201を実現するミクロ組織を製造するための指針となる情報になる。また、出力部1350は、製造工程情報に基づいて、製造設備を制御してもよい。
出力部1350は、決定部1344により製造工程情報が導出されると、当該製造工程情報を出力する。情報の出力の形態としては、例えば、コンピュータディスプレイへの表示、解析装置1300の内部または外部の記憶媒体への記憶、および外部装置への送信のうち、少なくとも1つを採用することができる。出力部1350による出力される製造工程情報は、目標S-S曲線201を実現するミクロ組織を製造するための指針となる情報になる。また、出力部1350は、製造工程情報に基づいて、製造設備を制御してもよい。
DP鋼の開発設計者または解析装置1300は、出力部1350により出力された製造工程情報に基づいて、DP鋼を製造する際の温度制御に関する製造工程を決定することができる。出力部1350により出力された製造工程情報から決定される製造工程を実現することが容易ではないでないことや、不可能なことがある。
このような場合、推定部1340に入力する目標S-S曲線201を変更することと、目標判定部1343で用いられる所定の範囲を変更することとの少なくとも何れか一方を行う。例えば、推定部1340に入力する目標S-S曲線201における応力の値を小さくする。これに加えてまたは代えて目標判定部1343で用いられる所定の範囲を大きくする。このようにして目標S-S曲線201および所定の範囲の少なくとも一方が変更された状態で、決定部1344により製造工程情報を導出し直す。このような処理を、出力部1350により出力された製造工程情報から決定される製造工程を実現することができるようになるまで繰り返す。
DP鋼は、製造設備において、製造工程情報に基づく温度制御を行うことにより製造される。これにより、目標S-S曲線201を実現するDP鋼が製造される。
DP鋼は、製造設備において、製造工程情報に基づく温度制御を行うことにより製造される。これにより、目標S-S曲線201を実現するDP鋼が製造される。
[フローチャート]
次に、図14のフローチャートを参照しながら、学習モデルを作成する際の解析装置1300における処理(解析方法)の一例を説明する。
次に、図14のフローチャートを参照しながら、学習モデルを作成する際の解析装置1300における処理(解析方法)の一例を説明する。
まず、ステップS1401において、情報取得部1310は、ミクロ組織の初期画像901と、目標S-S曲線201の情報とを取得する。
次に、ステップS1402において、状態導出部1321は、処理対象のミクロ組織の画像を設定する。最初のステップS1402では、状態導出部1321は、ミクロ組織の初期画像901を、処理対象のミクロ組織の画像として設定する。
次に、ステップS1402において、状態導出部1321は、処理対象のミクロ組織の画像を設定する。最初のステップS1402では、状態導出部1321は、ミクロ組織の初期画像901を、処理対象のミクロ組織の画像として設定する。
次に、ステップS1403において、状態導出部1321は、学習中のQテーブルを参照して、処理対象のミクロ組織の画像に対する状態の遷移の内容(行動)を導出する。Qテーブルは、記憶部1330に記憶されている。初期のQテーブルは、一様乱数により予め設定されている。
次に、ステップS1404において、状態導出部1321は、ステップS1403で導出された遷移の内容(行動)に従って処理対象のミクロ組織の画像の状態を遷移させる。これにより、遷移後のミクロ組織(次の状態のミクロ組織)の画像が導出される。
次に、ステップS1404において、状態導出部1321は、ステップS1403で導出された遷移の内容(行動)に従って処理対象のミクロ組織の画像の状態を遷移させる。これにより、遷移後のミクロ組織(次の状態のミクロ組織)の画像が導出される。
次に、ステップS1405において、状態導出部1321は、ステップS1404で生成されたミクロ組織の画像から、相変態後のミクロ組織の画像を導出する。
次に、ステップS1406において、報酬導出部1322は、ステップS1405で導出された相変態後のミクロ組織の画像からS-S曲線を導出する。
次に、ステップS1406において、報酬導出部1322は、ステップS1405で導出された相変態後のミクロ組織の画像からS-S曲線を導出する。
次に、ステップ1407において、学習部1323は、Qテーブルの要素のうち、処理対象のミクロ組織の画像に対応する状態(行)と、ステップS1403で導出された状態の遷移の内容に対応する行動(列)とにより定まる要素のQ値を、(12)式に基づいて更新する。
次に、ステップS1408において、目標判定部1324は、目標S-S曲線201と、ステップS1406で導出されたS-S曲線202との差が所定の範囲内であるか否かを判定する。
次に、ステップS1408において、目標判定部1324は、目標S-S曲線201と、ステップS1406で導出されたS-S曲線202との差が所定の範囲内であるか否かを判定する。
この判定の結果、目標S-S曲線201とS-S曲線202との差が所定の範囲内でない場合、処理はステップS1409に進む。処理がステップS1409に進むと、状態導出部1321は、ミクロ組織の画像の遷移の回数tに「1」を加算する。そして、処理はステップS1402に戻る。ステップS1409からステップS1402に処理が戻った場合、ステップS1402において、状態導出部1321は、直近のステップS1404で導出されたミクロ組織の画像を、処理対象のミクロ組織の画像として再設定する。目標S-S曲線201とS-S曲線202との差が所定の範囲内になるまで、ステップS1403~S1409の処理が繰り返し実行される。
ステップS1408において、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定されると、処理はステップS1410に進む。処理がステップS1410に進むと、決定部1325は、ステップS1408において、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定された時点における処理対象のミクロ組織の画像から特定されるミクロ組織の状態を、目標S-S曲線201を実現するミクロ組織の状態として決定する。当該ミクロ組織の画像が、ミクロ組織の最終画像である。ステップS1410の処理が実行されたタイミングでQテーブルの1回の学習が終了する。
次に、ステップS1411において、収束判定部1326は、所定の収束条件を満たすか否かを判定する。この判定の結果、所定の収束条件を満たさない場合、処理はステップS1412に進む。処理がステップS1412に進むと、ミクロ組織の画像の遷移の回数tを初期化する(t=0とする)。そして、処理はステップS1402に戻る。所定の収束条件を満たすまで、ステップS1402~S1412の処理が繰り返し実行される。
ステップS1411において、所定の収束条件を満たすと判定されると、Qテーブルの学習が終了する。
ステップS1411において、所定の収束条件を満たすと判定されると、Qテーブルの学習が終了する。
次に、図15のフローチャートを参照しながら、ミクロ組織の初期画像901からミクロ組織の最終画像に至るまでの遷移の内容(行動)を推定する際の解析装置1300における処理(解析方法)の一例を説明する。図15のフローチャートは、図14のフローチャートが実行された後に(即ち、Qテーブルが学習された後に)、実行される。
まず、ステップS1501において、情報取得部1310は、ミクロ組織の初期画像901と、目標S-S曲線201の情報とを取得する。
次に、ステップS1502において、状態導出部1341は、処理対象のミクロ組織の画像を設定する。最初のステップS1502では、状態導出部1341は、ミクロ組織の初期画像901を、処理対象のミクロ組織の画像として設定する。
次に、ステップS1502において、状態導出部1341は、処理対象のミクロ組織の画像を設定する。最初のステップS1502では、状態導出部1341は、ミクロ組織の初期画像901を、処理対象のミクロ組織の画像として設定する。
次に、ステップS1503において、状態導出部1341は、学習後のQテーブルを参照して、処理対象のミクロ組織の画像に対する状態の遷移の内容(行動)を導出する。Qテーブルは、記憶部1330に記憶されている。
次に、ステップS1504において、状態導出部1341は、ステップS1503で導出された遷移の内容(行動)に従って処理対象のミクロ組織の画像の状態を遷移させる。これにより、遷移後のミクロ組織(次の状態のミクロ組織)の画像が導出される。
次に、ステップS1504において、状態導出部1341は、ステップS1503で導出された遷移の内容(行動)に従って処理対象のミクロ組織の画像の状態を遷移させる。これにより、遷移後のミクロ組織(次の状態のミクロ組織)の画像が導出される。
次に、ステップS1505において、状態導出部1341は、ステップS1504で生成されたミクロ組織の画像から、相変態後のミクロ組織の画像を導出する。
次に、ステップS1506において、報酬導出部1342は、ステップS1505で導出された相変態後のミクロ組織の画像からS-S曲線を導出する。
次に、ステップS1506において、報酬導出部1342は、ステップS1505で導出された相変態後のミクロ組織の画像からS-S曲線を導出する。
次に、ステップ1507において、目標判定部1343は、目標S-S曲線201と、ステップS1506で導出されたS-S曲線202との差が所定の範囲内であるか否かを判定する。
この判定の結果、目標S-S曲線201とS-S曲線202との差が所定の範囲内でない場合、処理はステップS1508に進む。処理がステップS1509に進むと、状態導出部1341は、ミクロ組織の画像の遷移の回数tに「1」を加算する。そして、処理はステップS1502に戻る。ステップS1508からステップS1502に処理が戻った場合、ステップS1502において、状態導出部1341は、直近のステップS1504で導出されたミクロ組織の画像を、処理対象のミクロ組織の画像として再設定する。目標S-S曲線201とS-S曲線202との差が所定の範囲内になるまで、ステップS1503~S1508の処理が繰り返し実行される。
ステップS1507において、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定されると、処理はステップS1509に進む。処理がステップS1509に進むと、決定部1344は、ステップS1507において、目標S-S曲線201とS-S曲線202との差が所定の範囲内であると判定された時点における処理対象のミクロ組織の画像から特定されるミクロ組織の状態を、目標S-S曲線201を実現するミクロ組織の状態として決定する。当該ミクロ組織の画像が、ミクロ組織の最終画像である。そして、決定部1344は、目標S-S曲線201を実現する製造工程情報を導出する。
次に、ステップS1510において、出力部1350は、ステップS1509で導出された製造工程情報を出力する。そして、図15のフローチャートによる処理が終了する。
[ハードウェアの構成]
図16は、解析装置1300のハードウェアの構成の一例を示す図である。
図16において、解析装置1300は、CPU1601、主記憶装置1602、補助記憶装置1603、通信回路1604、信号処理回路1605、画像処理回路1606、I/F回路1607、ユーザインターフェース1608、ディスプレイ1609、およびバス1610を有する。
図16は、解析装置1300のハードウェアの構成の一例を示す図である。
図16において、解析装置1300は、CPU1601、主記憶装置1602、補助記憶装置1603、通信回路1604、信号処理回路1605、画像処理回路1606、I/F回路1607、ユーザインターフェース1608、ディスプレイ1609、およびバス1610を有する。
CPU1601は、演算装置であり、解析装置1300の全体を統括制御する。CPU1601は、主記憶装置1602をワークエリアとして用いて、補助記憶装置1603に記憶されているプログラムを実行する。図14および図15に示したフローチャートの処理は、例えば、CPU1601が、補助記憶装置1603に記憶されているプログラムを実行することにより実現される。主記憶装置1602は、データを一時的に格納する。補助記憶装置1603は、CPU1601によって実行されるプログラムの他、各種のデータを記憶する。補助記憶装置1603は、前述した図14および図15に示したフローチャートの処理に必要な情報を記憶する。
通信回路1604は、解析装置1300の外部との通信を行うための回路である。
信号処理回路1605は、通信回路1604で受信された信号や、CPU1601による制御に従って入力した信号に対し、各種の信号処理を行う。作成部1320および推定部1340は、例えば、CPU1601および信号処理回路1605を用いることによりその機能を発揮する。
信号処理回路1605は、通信回路1604で受信された信号や、CPU1601による制御に従って入力した信号に対し、各種の信号処理を行う。作成部1320および推定部1340は、例えば、CPU1601および信号処理回路1605を用いることによりその機能を発揮する。
画像処理回路1606は、CPU1601による制御に従って入力した信号に対し、各種の画像処理を行う。この画像処理が行われた信号は、ディスプレイ1609に出力される。
ユーザインターフェース1608は、オペレータが解析装置1300に対して指示を行う部分である。ユーザインターフェース1608は、例えば、ボタン、スイッチ、およびダイヤル等を有する。また、ユーザインターフェース1608は、ディスプレイ1609を用いたグラフィカルユーザインターフェースを有していても良い。情報取得部1310は、例えば、CPU1601、信号処理回路1605、およびユーザインターフェース1608と、CPU1601、通信回路1604、および信号処理回路1605との一方を用いることによりその機能を発揮する。
ユーザインターフェース1608は、オペレータが解析装置1300に対して指示を行う部分である。ユーザインターフェース1608は、例えば、ボタン、スイッチ、およびダイヤル等を有する。また、ユーザインターフェース1608は、ディスプレイ1609を用いたグラフィカルユーザインターフェースを有していても良い。情報取得部1310は、例えば、CPU1601、信号処理回路1605、およびユーザインターフェース1608と、CPU1601、通信回路1604、および信号処理回路1605との一方を用いることによりその機能を発揮する。
ディスプレイ1609は、画像処理回路1606から出力された信号に基づく画像を表示する。I/F回路1607は、I/F回路1607に接続される装置との間でデータのやり取りを行う。図16では、I/F回路1607に接続される装置として、ユーザインターフェース1608およびディスプレイ1609を示す。しかしながら、I/F回路1607に接続される装置は、これらに限定されない。例えば、可搬型の記憶媒体がI/F回路1607に接続されても良い。また、ユーザインターフェース1608の少なくとも一部およびディスプレイ1609は、解析装置1300の外部にあってもよい。
出力部1350は、例えば、通信回路1604および信号処理回路1605と、画像処理回路1606、I/F回路1607、およびディスプレイ1609との少なくとも何れか一方を用いることによりその機能を発揮する 。
出力部1350は、例えば、通信回路1604および信号処理回路1605と、画像処理回路1606、I/F回路1607、およびディスプレイ1609との少なくとも何れか一方を用いることによりその機能を発揮する 。
尚、CPU1601、主記憶装置1602、補助記憶装置1603、信号処理回路1605、画像処理回路1606、およびI/F回路1607は、バス1610に接続される。これらの構成要素間の通信は、バス1610を介して行われる。また、解析装置1300のハードウェアは、前述した解析装置1300の機能を実現することができれば、図16に示すものに限定されない。
[まとめ]
以上のように本実施形態では、解析装置1300は、ミクロ組織の画像の状態の遷移の内容(行動)を導出する。解析装置1300は、当該遷移の内容に従って遷移後のミクロ組織の画像を導出する。解析装置1300は、遷移後のミクロ組織の画像を用いて、S-S曲線を導出する。解析装置1300は、S-S曲線と目標S-S曲線との差が所定の範囲内でない場合、ミクロ組織の画像の状態の遷移の内容(行動)を再導出する。解析装置1300は、S-S曲線と目標S-S曲線との差が所定の範囲内になるまで、以上の処理を繰り返す。解析装置1300は、S-S曲線と目標S-S曲線との差が所定の範囲内になった時点における遷移後のミクロ組織の画像から特定される状態を、目標S-S曲線を実現するミクロ組織の状態として決定する。
以上のように本実施形態では、解析装置1300は、ミクロ組織の画像の状態の遷移の内容(行動)を導出する。解析装置1300は、当該遷移の内容に従って遷移後のミクロ組織の画像を導出する。解析装置1300は、遷移後のミクロ組織の画像を用いて、S-S曲線を導出する。解析装置1300は、S-S曲線と目標S-S曲線との差が所定の範囲内でない場合、ミクロ組織の画像の状態の遷移の内容(行動)を再導出する。解析装置1300は、S-S曲線と目標S-S曲線との差が所定の範囲内になるまで、以上の処理を繰り返す。解析装置1300は、S-S曲線と目標S-S曲線との差が所定の範囲内になった時点における遷移後のミクロ組織の画像から特定される状態を、目標S-S曲線を実現するミクロ組織の状態として決定する。
従って、空間階層間の物理現象を繋げることができる。よって、マクロな系の因子(S-S曲線)から、ミクロな系の因子(ミクロ組織の状態)を、少数のデータからDP鋼の内部に生じる物理現象に従って導出することが可能になる。よって、物理現象で結ばれる原因と結果が、異なる空間階層に属する場合に、当該結果から当該原因を正確に推定することができる。
また、本実施形態では、解析装置1300は、目標S-S曲線を実現するミクロ組織の状態を決定することを繰り返し行う処理を含む処理によって強化学習を行う。従って、強化学習により導出される遷移関数を用いる場合における内挿に相当する機能だけでなく、外挿に相当する機能も実現することができる。
また、本実施形態では、解析装置1300は、構造材料の一例であるDP鋼のミクロ組織の初期画像から、ミクロ組織の最終画像に至るまでの状態の遷移の内容(行動)を決定する。従って、ミクロ組織をどのように遷移させれば、目標S-S曲線を実現する構造材料を製造することができるのかについての指標が得られる。従って、目標S-S曲線を実現する構造材料を製造するための製造工程を導出することができる。構造材料を何度も製造し直さなくても、目標S-S曲線を実現する構造材料を製造することができる。これにより、構造材料の開発コストおよび製造コストを低減することができる。
本実施形態では、解析装置1300は、軟質相のみからなるミクロ組織の画像に対応する相変態後のミクロ組織の画像を導出する。従って、相変態後のミクロ組織の画像を容易に導出することができる。また、ミクロ組織の画像を予め用意しておくことで、硬質相の割合の変更と、相変態後のミクロ組織の画像の導出とを容易に行うことができる。
[変形例]
<第1の変形例>
本実施形態では、DP鋼の機械特性に関する因子(物理量)として、S-S曲線である場合を例に挙げて説明した。しかしながら、機械特性に関する因子は、S-S曲線に限定されない。例えば、解析対象が構造材料である場合、引張強さおよび均一伸びの少なくとも一方を機械特性に関する因子としてもよい。引張強さは、S-S曲線における最大の応力である。均一伸びは、S-S曲線における最大の応力に対応する歪である。また、0.2%耐力や全伸びを機械特性に関する因子として用いてもよい。
<第1の変形例>
本実施形態では、DP鋼の機械特性に関する因子(物理量)として、S-S曲線である場合を例に挙げて説明した。しかしながら、機械特性に関する因子は、S-S曲線に限定されない。例えば、解析対象が構造材料である場合、引張強さおよび均一伸びの少なくとも一方を機械特性に関する因子としてもよい。引張強さは、S-S曲線における最大の応力である。均一伸びは、S-S曲線における最大の応力に対応する歪である。また、0.2%耐力や全伸びを機械特性に関する因子として用いてもよい。
<第2の変形例>
本実施形態では、ミクロ組織の画像に、結晶粒の粒界および方位の情報と、ミクロ組織における元素濃度の分布の情報とが含まれているものとする場合を例に挙げて説明した。しかしながら、必ずしもこのようにする必要はない。例えば、ミクロ組織における元素濃度の分布の情報を、ミクロ組織の画像とは別個に管理してもよい。
本実施形態では、ミクロ組織の画像に、結晶粒の粒界および方位の情報と、ミクロ組織における元素濃度の分布の情報とが含まれているものとする場合を例に挙げて説明した。しかしながら、必ずしもこのようにする必要はない。例えば、ミクロ組織における元素濃度の分布の情報を、ミクロ組織の画像とは別個に管理してもよい。
<第3の変形例>
本実施形態では、解析対象がDP鋼である場合を例に挙げて説明した。しかしながら、解析対象は、DP鋼に限定されない。例えば、解析対象は、DP鋼以外のミクロ組織を有する材料であってもよい。DP鋼以外の鋼材や、その他の金属材料を解析対象とすることができる。また、金属材料以外の材料(例えば、半導体)であってもよい。また、材料以外であってもよい。
本実施形態では、解析対象がDP鋼である場合を例に挙げて説明した。しかしながら、解析対象は、DP鋼に限定されない。例えば、解析対象は、DP鋼以外のミクロ組織を有する材料であってもよい。DP鋼以外の鋼材や、その他の金属材料を解析対象とすることができる。また、金属材料以外の材料(例えば、半導体)であってもよい。また、材料以外であってもよい。
<第4の変形例>
本実施形態のように、軟質相のみからなるミクロ組織の画像を導出し、当該軟質相のみからなるミクロ組織の画像に対応する相変態後のミクロ組織の画像を導出するのが好ましい。しかしながら、必ずしもこのようにする必要はない。例えば、相変態後のミクロ組織の画像を予め用意してもよい。この場合、解析装置1300は、相変態後のミクロ組織の画像(ミクロ組織の画像0a~62aではなくミクロ組織の画像0b~62b)の遷移を探索することになる。
本実施形態のように、軟質相のみからなるミクロ組織の画像を導出し、当該軟質相のみからなるミクロ組織の画像に対応する相変態後のミクロ組織の画像を導出するのが好ましい。しかしながら、必ずしもこのようにする必要はない。例えば、相変態後のミクロ組織の画像を予め用意してもよい。この場合、解析装置1300は、相変態後のミクロ組織の画像(ミクロ組織の画像0a~62aではなくミクロ組織の画像0b~62b)の遷移を探索することになる。
<第5の変形例>
本実施形態のように学習モデルを作成するのが好ましい。しかしながら、学習モデルを用いずに、状態導出部1341、報酬導出部1342、目標判定部1343、および決定部1344による処理が行われるようにしてもよい。この場合、状態導出部1341は、Qテーブルを参照しない。その代わりに、状態導出部1341は、例えば、DP鋼のミクロ組織の状態の遷移の内容(行動)の1つを、ランダムに選択することにより導出する。
本実施形態のように学習モデルを作成するのが好ましい。しかしながら、学習モデルを用いずに、状態導出部1341、報酬導出部1342、目標判定部1343、および決定部1344による処理が行われるようにしてもよい。この場合、状態導出部1341は、Qテーブルを参照しない。その代わりに、状態導出部1341は、例えば、DP鋼のミクロ組織の状態の遷移の内容(行動)の1つを、ランダムに選択することにより導出する。
<第6の変形例>
本実施形態では、作成部1320と、推定部1340とが同一の解析装置1300に含まれる解析システムを例に挙げて説明した。しかしながら、必ずしもこのようにする必要はない。作成部1320と、推定部1340は、別の解析装置に配置されていてもよい。この場合、当該解析装置が解析システムに含まれる。また、記憶部1330は、解析装置1300の外部にあってもよい。
本実施形態では、作成部1320と、推定部1340とが同一の解析装置1300に含まれる解析システムを例に挙げて説明した。しかしながら、必ずしもこのようにする必要はない。作成部1320と、推定部1340は、別の解析装置に配置されていてもよい。この場合、当該解析装置が解析システムに含まれる。また、記憶部1330は、解析装置1300の外部にあってもよい。
<<第2の実施形態>>
次に、第2の実施形態を説明する。第1の実施形態では、エージェントが解析装置1300(状態導出部1321、1341)である場合を例に挙げて説明した。これに対し、本実施形態では、エージェントが人(材料設計者)である場合を例に挙げて説明する。本実施形態と第1の実施形態は、エージェントが異なることによる構成および処理が主として異なる。従って、本実施形態の説明において、第1の実施形態と同一の部分についての詳細な説明を省略する。
次に、第2の実施形態を説明する。第1の実施形態では、エージェントが解析装置1300(状態導出部1321、1341)である場合を例に挙げて説明した。これに対し、本実施形態では、エージェントが人(材料設計者)である場合を例に挙げて説明する。本実施形態と第1の実施形態は、エージェントが異なることによる構成および処理が主として異なる。従って、本実施形態の説明において、第1の実施形態と同一の部分についての詳細な説明を省略する。
[解析装置1700]
本実施形態の解析装置1700の一例について説明する。本実施形態でも、第1の実施形態と同様に、解析対象がDP鋼であるとする。また、本実施形態でも、第1の実施形態と同様に、DP鋼のミクロ組織に、硬質相(マルテンサイト相)および軟質相(フェライト相)以外の領域(空隙等)がないものとして説明を行う。
図17は、解析装置1700の機能的な構成の一例を示す図である。図18は、解析装置1700における処理の一例を概念的に説明する図である。解析装置1700のハードウェアは、例えば、図16に示すもので実現することができる。
本実施形態の解析装置1700の一例について説明する。本実施形態でも、第1の実施形態と同様に、解析対象がDP鋼であるとする。また、本実施形態でも、第1の実施形態と同様に、DP鋼のミクロ組織に、硬質相(マルテンサイト相)および軟質相(フェライト相)以外の領域(空隙等)がないものとして説明を行う。
図17は、解析装置1700の機能的な構成の一例を示す図である。図18は、解析装置1700における処理の一例を概念的に説明する図である。解析装置1700のハードウェアは、例えば、図16に示すもので実現することができる。
<情報取得部1701>
情報取得部1701は、解析対象であるDP鋼のミクロ組織の3次元画像を取得する。以下の説明では、DP鋼のミクロ組織の3次元画像を、必要に応じてミクロ組織3D画像と称する。ミクロ組織3D画像は、例えば、EBSD(Electron Backscattering Diffraction)やTEM(Transmission Electron Microscope)等の公知の技術を用いることにより得ることができる。従って、ここでは、その詳細な説明を省略する。尚、ミクロ組織3D画像の各ボクセルには、当該ボクセルが軟質相および硬質相の何れであるかを示す2値化ラベルが与えられている。
情報取得部1701は、解析対象であるDP鋼のミクロ組織の3次元画像を取得する。以下の説明では、DP鋼のミクロ組織の3次元画像を、必要に応じてミクロ組織3D画像と称する。ミクロ組織3D画像は、例えば、EBSD(Electron Backscattering Diffraction)やTEM(Transmission Electron Microscope)等の公知の技術を用いることにより得ることができる。従って、ここでは、その詳細な説明を省略する。尚、ミクロ組織3D画像の各ボクセルには、当該ボクセルが軟質相および硬質相の何れであるかを示す2値化ラベルが与えられている。
<状態導出部1702>
状態導出部1702は、第1の導出部である。状態導出部1702は、外部からの指示に基づいて、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更する。
外部からの指示は、例えば、以下のようにして行われる。即ち、エージェント(材料設計者)は、VR(Virtual Reality)装置を用いて、VR空間におけるミクロ組織の分布(軟質相および硬質相の領域)を変更する操作を行う。VR装置は、例えば、VRヘッドマウントディスプレイおよびジェスチャー入力装置である。状態導出部1702は、当該操作の内容に合うように、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更する。エージェント(材料設計者)は、例えば、DP鋼における応力集中箇所に対応するボクセルにおける2値化ラベルの値を変更することができる。
状態導出部1702は、第1の導出部である。状態導出部1702は、外部からの指示に基づいて、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更する。
外部からの指示は、例えば、以下のようにして行われる。即ち、エージェント(材料設計者)は、VR(Virtual Reality)装置を用いて、VR空間におけるミクロ組織の分布(軟質相および硬質相の領域)を変更する操作を行う。VR装置は、例えば、VRヘッドマウントディスプレイおよびジェスチャー入力装置である。状態導出部1702は、当該操作の内容に合うように、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更する。エージェント(材料設計者)は、例えば、DP鋼における応力集中箇所に対応するボクセルにおける2値化ラベルの値を変更することができる。
本実施形態では、図18に示すように、ミクロ組織3D画像は、環境(environment)に対応する。ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更することは、マルコフ決定過程における行動(action)atに対応する。また、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値は、逆問題における原因に対応する。また、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が変更されることにより、状態(state)Stが遷移する。状態は、後述するように、各ボクセルにおける応力および歪を含む。また、本実施形態では、マルコフ決定過程における時刻tに対応するものとして、ミクロ組織の変更回数tを用いる。ここでは、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更することによって、時刻t+1におけるミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が得られたものとして、説明を続ける。
ミクロ組織の状態の有限集合S={s1,s2,・・・,sN}のNは、ミクロ組織3D画像のボクセルにおける2値化ラベルの値の組み合わせの総数である。本実施形態では、ミクロ組織の状態の有限集合Sの各状態snには、その要素として、各ボクセルにおける2値化ラベルの値、応力、および歪が含まれるものとする。尚、2値化ラベルの値、応力、および歪毎に区別して状態を定義してもよい。
また、ミクロ組織の行動の有限集合A={a1,a2,・・・,aK}のKは、ミクロ組織3D画像のボクセルにおける2値化ラベルの値の変更に関する値の組み合わせの総数である。本実施形態では、ミクロ組織の行動の有限集合Aの各行動akには、その要素として、各ボクセルにおける2値化ラベルの値の変更に関する値が含まれるものとする。変更に関する値とは、2値化ラベルの値を元のまま維持するか否かを示す値である。
状態導出部1702は、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更すると、DP鋼に与える外部歪(引張荷重となる外力)を設定する。状態導出部1702は、設定した外部歪をDP鋼に与えたときのミクロ組織3D画像の各位置xにおける応力σ(x)および歪ε(x)を弾塑性解析により導出する。ここでは、説明を簡単にするため、ミクロ組織3D画像の各位置xを、ミクロ組織3D画像の各ボクセル(の位置)xとする場合を例に挙げて説明する。
以上のように本実施形態では、DP鋼をボクセルの単位で分割し(即ち、1つの分割領域を1つのボクセルとし)、分割した複数のボクセルにおける応力σ(x)および歪ε(x)を導出する場合を例に挙げて説明する。ただし、分割領域は、このような領域に限定されない。例えば、数値解析で使用するメッシュの領域を分割領域としてもよい。尚、分割領域とは、解析対象であるDP鋼を複数の領域に分割した場合の個々の領域をいう。また、本実施形態では、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値により、ミクロ組織のそれぞれの状態が定まる。本実施形態では、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が第1の因子(金属材料の複数の分割領域のそれぞれにおけるミクロ組織に関する因子)である。
本実施形態では、状態導出部1702は、均質化法を用いて、歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)を導出する。本実施形態でも、均質化法が、前述した空間階層間の物理現象を一貫して論理的に説明する方法論の役割を担う。均質化法は、第1の実施形態で説明したものである。
状態導出部1702は、歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)の組を導出することを、全ての位置xのボクセルについて行う。
本実施形態では、状態導出部1702は、DP鋼に与える外部歪として所定の複数の外部歪を設定する。状態導出部1702は、それぞれの外部歪をDP鋼に与えた場合のそれぞれについて、以上のようにして歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)の組を、全ての位置xのボクセルに対して導出する。このように本実施形態では、DP鋼に与える外部歪の設定を変更することにより、DP鋼に対して相異なる作用を施す場合を例に挙げて説明する。ここで、解析対象の状態が変更するようにしていれば、どのような作用を解析対象に施してもよい。即ち、作用とは、解析対象の状態を変更するための操作をいう。
本実施形態では、状態導出部1702は、DP鋼に与える外部歪として所定の複数の外部歪を設定する。状態導出部1702は、それぞれの外部歪をDP鋼に与えた場合のそれぞれについて、以上のようにして歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)の組を、全ての位置xのボクセルに対して導出する。このように本実施形態では、DP鋼に与える外部歪の設定を変更することにより、DP鋼に対して相異なる作用を施す場合を例に挙げて説明する。ここで、解析対象の状態が変更するようにしていれば、どのような作用を解析対象に施してもよい。即ち、作用とは、解析対象の状態を変更するための操作をいう。
状態導出部1702は、以上のようにして、ミクロ組織3D画像の2値化ラベルの値を変更することにより、DP鋼のミクロ組織の状態(各ボクセルxにおける歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x))を遷移させる。本実施形態では、図17に示すように、DP鋼のミクロ組織の状態(各ボクセルxにおける歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x))がマルコフ決定過程における状態および逆問題における結果に対応する。また、以上のようにしてDP鋼のミクロ組織の状態を遷移させるため、時刻tの状態stから行動atをとったときに遷移する次の時刻t+1の状態st+1は、一意に定まる。以下の説明では、この一意に定まる状態をst+1をat(st)と表記することにする。すると、遷移関数f(st+1|st,at)は、st+1がat(st)のときに1、そうでないときに0である関数となる。
状態導出部1702は、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更し、ミクロ組織の変更回数tを更新する度に、以上のようにして、外部歪をDP鋼に与えた場合の、全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組を導出する。状態導出部1702は、全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組の導出を、所定の複数の外部歪をDP鋼に与えた場合のそれぞれについて実行する。本実施形態では、各位置x(ボクセル)における歪εt+1(ut+1)(x)および応力σt+1(εt+1(ut+1))(x)の組が第2の因子(金属材料の複数の分割領域のそれぞれにおける機械特性を示す因子)である。当該組は、ミクロ組織のそれぞれに対して個別に定まる。
<報酬導出部1703>
報酬導出部1703は、第2の導出部である。報酬導出部1703は、状態導出部1702により、或る外部歪をDP鋼に与えた場合の、全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組が導出されると起動する。報酬導出部1703は、当該全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の代表値を導出する。代表値として、例えば、平均値が用いられる。これにより、或る外部歪をDP鋼に与えた場合のDP鋼の歪および応力の組が一組得られる。
報酬導出部1703は、第2の導出部である。報酬導出部1703は、状態導出部1702により、或る外部歪をDP鋼に与えた場合の、全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組が導出されると起動する。報酬導出部1703は、当該全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の代表値を導出する。代表値として、例えば、平均値が用いられる。これにより、或る外部歪をDP鋼に与えた場合のDP鋼の歪および応力の組が一組得られる。
報酬導出部1703は、以上のようにしてDP鋼の歪および応力の代表値を導出することを、所定の複数の外部歪をDP鋼に与えた場合のそれぞれについて実行する。これにより、DP鋼の歪および応力の組が複数得られる。そして、報酬導出部1703は、それらの組から、S-S曲線を導出する。
報酬導出部1703は、S-S曲線における最大の応力を、DP鋼の引張強さとして導出する。報酬導出部1703は、当該応力に対応する歪を用いて、DP鋼の均一伸びを導出する。
これにより、DP鋼のミクロ組織の状態(各位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x))における、DP鋼の引張強さおよび均一伸びが導出される。
これにより、DP鋼のミクロ組織の状態(各位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x))における、DP鋼の引張強さおよび均一伸びが導出される。
更に、報酬導出部1703は、DP鋼の引張強さおよび均一伸びに基づいて、DP鋼の穴広げ率を導出する。DP鋼の穴広げ率は、例えば、予め実験を行うことにより、DP鋼の引張強さおよび均一伸びと、DP鋼の穴広げ率との関係を示す関数を定めることで得ることができる。また、DP鋼の穴広げ率は、ニューラルネットワークを用いて、DP鋼の引張強さおよび均一伸びからDP鋼の穴広げ率を予測するモデルを作成することでも得ることができる。
報酬導出部1703は、以上のようにして、DP鋼の引張強さ、均一伸び、および穴広げ率の値として、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が変更され、DP鋼のミクロ組織の状態が遷移した場合の値を導出する。本実施形態では、以上のようにしてDP鋼の引張強さ、均一伸び、および穴広げ率を導出するための処理手順が報酬関数r1(st,at,st+1)、r2(st,at,st+1)、r3(st,at,st+1)に対応する。
即ち、報酬関数r1(st,at,st+1)は、即時報酬がr1
t+1である状態がstからst+1へ遷移したときのDP鋼の引張強さの変化分(増分または減分)を導出するものとして定義される。報酬関数r2(st,at,st+1)は、即時報酬がr2
t+1である状態がstからst+1へ遷移したときのDP鋼の均一伸びの変化分(増分または減分)を導出するものとして定義される。報酬関数r3(st,at,st+1)は、即時報酬がr3
t+1である状態がstからst+1へ遷移したときのDP鋼の穴広げ率の変化分(増分または減分)を導出するものとして定義される。
報酬導出部1703は、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が変更され、ミクロ組織の変更回数tが更新される度に、以上のようにして、DP鋼の引張強さ、均一伸び、および穴広げ率を導出する。DP鋼の引張強さ、均一伸び、および穴広げ率は、DP鋼の全体における機械特性に関する因子である。このように本実施形態では、DP鋼の引張強さ、均一伸び、および穴広げ率が第3の因子(金属材料の全体における機械特性に関する因子)である。DP鋼の引張強さ、均一伸び、および穴広げ率は、DP鋼のミクロ組織の集合に対して定まる因子である。DP鋼の引張強さ、均一伸び、および穴広げ率は、DP鋼の全体に対してしか定まらず、DP鋼のミクロ組織のそれぞれに対して個別に定まる因子ではない。尚、S-S曲線をテーブルとして用意してもよい。この場合、当該テーブルにおける値の補間式から、S-S曲線における最大の応力を導出することができる。当該補間式は、解析対象が従うべき物理現象を表す数式の一例である。DP鋼の引張強さおよび均一伸びとDP鋼の穴広げ率との関係を示す関数は、解析対象が従うべき物理現象を表す数式の一例である。DP鋼の穴広げ率は、数式以外のモデルを用いて導出してもよい。
<決定部1704>
報酬(例えば、引張強さおよび均一伸び)が目標範囲になることが、M回のミクロ組織の変更回数t(t=M)で得られたとすると、(1)式を使い、各報酬関数r1、r2、r3に関する累積報酬ρ1、ρ2、ρ3を、それぞれ、以下の(14)式、(15)式、(16)式のように表す。
報酬(例えば、引張強さおよび均一伸び)が目標範囲になることが、M回のミクロ組織の変更回数t(t=M)で得られたとすると、(1)式を使い、各報酬関数r1、r2、r3に関する累積報酬ρ1、ρ2、ρ3を、それぞれ、以下の(14)式、(15)式、(16)式のように表す。

ここで、割引因子γ1、γ2、γ3は、例えば、過去の実績等に基づいて報酬関数r1、r2、r3毎に経験的に定められる。尚、γ1、γ2、γ3を全て「0」とすれば、ミクロ組織の変更回数tが1であるときの即時報酬r1
t、r2
t、r3
tのみを採用することになる(報酬の累積は行われない)。
初期のミクロ組織の状態s0に対して方策πに従う行動(各ボクセルにおける2値化ラベルの値の変更)を施して状態を変更することをM回行うことにより、得られる累積報酬の期待値E[ρ|π]は以下の(17)式のように表される。そして、(2)式により、最適な方策π*(各ボクセルにおける2値化ラベルの値の最適値)が導出される。

決定部1704は、報酬導出部1703により、DP鋼の引張強さ、均一伸び、および穴広げ率が導出されると、それぞれの累積報酬ρ1、ρ2、ρ3を導出する。決定部1704は、当該累積報酬ρ1、ρ2、ρ3に基づいて単一の累積報酬ρを導出する。通常、引張強さ、均一伸び、および穴広げ率の全ての報酬を最大にすることは困難である。そこで、累積報酬ρとして、例えば、ナッシュ均衡と呼ばれるゲーム理論における非協力ゲームの解(均衡解)を用いることができる。尚、累積報酬ρは、このようなものに限定されない。決定部1704は、例えば、累積報酬ρ1、ρ2、ρ3の積算値を、累積報酬ρとして導出してもよい。
解析装置1700は、以上のようにして決定部1704が(2)式により最適な方策π*(全てのボクセルにおける2値化ラベルの値の最適値)を導出するまで、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値の変更を繰り返し行い、前述した状態導出部1702、報酬導出部1703、および決定部1704による処理を繰り返し実行する。この繰り返し処理は、例えば、前述した動的計画法を適用して、累積報酬ρ(価値関数)の前回値と今回値との差が所定の範囲内になるまで行うことができる。本実施形態では、累積報酬ρ(価値関数)が、前述した第3の因子に対する評価値になる。累積報酬ρ(価値関数)の前回値と今回値との差が所定の範囲内になることが、前述した所定の条件である。
<出力部1705>
出力部1705は、決定部1704により全てのボクセルにおける2値化ラベルの値の最適値が導出されると、そのことを示す情報を出力する。情報の出力の形態としては、例えば、コンピュータディスプレイへの表示、解析装置1700の内部または外部の記憶媒体への記憶、および外部装置への送信のうち、少なくとも1つを採用することができる。
出力部1705は、決定部1704により全てのボクセルにおける2値化ラベルの値の最適値が導出されると、そのことを示す情報を出力する。情報の出力の形態としては、例えば、コンピュータディスプレイへの表示、解析装置1700の内部または外部の記憶媒体への記憶、および外部装置への送信のうち、少なくとも1つを採用することができる。
[フローチャート]
次に、図19のフローチャートを参照しながら、解析装置1700における処理(解析方法)の一例を説明する。
まず、ステップS1901において、情報取得部1701は、ミクロ組織3D画像を取得する。
次に、ステップS1902において、状態導出部1702は、外部からの指示に基づいて、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更する。
次に、ステップS1903において、状態導出部1702は、ミクロ組織の変更回数tに「1」を加算する。ミクロ組織の変更回数tの初期値は「0」である。
次に、図19のフローチャートを参照しながら、解析装置1700における処理(解析方法)の一例を説明する。
まず、ステップS1901において、情報取得部1701は、ミクロ組織3D画像を取得する。
次に、ステップS1902において、状態導出部1702は、外部からの指示に基づいて、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更する。
次に、ステップS1903において、状態導出部1702は、ミクロ組織の変更回数tに「1」を加算する。ミクロ組織の変更回数tの初期値は「0」である。
次に、ステップS1904において、状態導出部1702は、外部歪を設定する。
次に、ステップS1905において、状態導出部1702は、ステップS1904で設定された外部歪がDP鋼に与えられた場合の、各位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組を、均質化法を用いて導出する。
次に、ステップS1905において、状態導出部1702は、ステップS1904で設定された外部歪がDP鋼に与えられた場合の、各位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組を、均質化法を用いて導出する。
次に、ステップS1906において、状態導出部1702は、DP鋼に与える外部歪として所定の複数の外部歪を全て設定したか否かを判定する。この判定の結果、外部歪を全て設定していない場合、処理は、ステップS1904に戻る。そして、ステップS1904において、状態導出部1702は、新たな外部歪を設定する。ステップS1905において、状態導出部1702は、当該新たな外部歪がDP鋼に与えられた場合の、各位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組を、均質化法を用いて導出する。そして、外部歪を全て設定するまで、ステップS1904~S1906の処理が繰り返し実行される。
以上のようにして、DP鋼に与える外部歪として所定の複数の外部歪がDP鋼に与えられた場合の、各位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の組が導出されると、処理は、ステップS1907に進む。
ステップS1907において、報酬導出部1703は、ステップS1904で設定された外部歪をDP鋼に与えた場合の、全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の代表値を、ステップS1904で設定された外部歪のそれぞれについて導出し、その結果から、S-S曲線を作成する。
ステップS1907において、報酬導出部1703は、ステップS1904で設定された外部歪をDP鋼に与えた場合の、全ての位置xのボクセルにおける歪εt(ut)(x)および応力σt(εt(ut))(x)の代表値を、ステップS1904で設定された外部歪のそれぞれについて導出し、その結果から、S-S曲線を作成する。
次に、ステップS1908において、報酬導出部1703は、S-S曲線における最大の応力を、DP鋼の引張強さとして導出する。報酬導出部1703は、S-S曲線における最大の応力に対応する歪を用いてDP鋼の均一伸びを導出する。
次に、ステップS1909において、報酬導出部1703は、ステップS1908で導出したDP鋼の引張強さおよび均一伸びに基づいて、DP鋼の穴広げ率を導出する。
次に、ステップS1909において、報酬導出部1703は、ステップS1908で導出したDP鋼の引張強さおよび均一伸びに基づいて、DP鋼の穴広げ率を導出する。
次に、ステップS1910において、決定部1704は、ミクロ組織の変更回数tが「1」から現在値になるまでの間にステップS1908~S1910で導出された、DP鋼の引張強さ、均一伸び、および穴広げ率に基づいて、それぞれの累積報酬ρ1、ρ2、ρ3を導出し、当該累積報酬ρ1、ρ2、ρ3に基づいて累積報酬ρを導出する。
次に、ステップS1911において、決定部1704は、ステップS1910で導出された累積報酬ρが所定の収束条件を満たすか否かを判定する。この判定の結果、累積報酬ρが所定の収束条件を満たさない場合、処理は、ステップS1902に戻る。そして、ステップS1902において、状態導出部1702は、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更する。その後、ステップS1903~S1910の処理により、累積報酬ρが所定の収束条件を満たすまで、ステップS1902~S1911の処理が繰り返し実行される。
以上のようにして累積報酬ρが所定の収束条件を満たすと、処理は、ステップS1912に進む。処理がステップS1912に進むと、決定部1704は、所定の収束条件を満たしたときにステップS1902で変更された(最新の)ミクロ組織の2値化ラベルの値を、各ボクセルにおける2値化ラベルの値の最適値として決定する。
次に、ステップS1913において、出力部1705は、各ボクセルにおける2値化ラベルの値の最適値を示す情報を出力する。
そして、図19のフローチャートによる処理が終了する。
次に、ステップS1913において、出力部1705は、各ボクセルにおける2値化ラベルの値の最適値を示す情報を出力する。
そして、図19のフローチャートによる処理が終了する。
[まとめ]
以上のように本実施形態では、解析装置1700は、ミクロ組織3D画像の各ボクセルxの2値化ラベルの値(硬質相か軟質相かを示す値)が変更されると、DP鋼に外部歪を与えた場合の、各ボクセルの応力および歪を、均質化法を用いて導出し、それらの代表値を導出する。解析装置1700は、各ボクセルの応力および歪の代表値を導出することを、予め設定されている外部歪をDP鋼に与えた場合のそれぞれについて実行する。解析装置1700は、各外部歪をDP鋼に与えた場合の、各ボクセルの応力および歪の代表値から、S-S曲線を導出する。解析装置1700は、S-S曲線から、DP鋼全体の引張強さおよび均一伸びと、DP鋼全体の穴広げ率とを導出する。解析装置1700は、DP鋼全体の引張強さ、均一伸び、および穴広げ率に基づいて累積報酬を導出する。解析装置1700は、累積報酬が収束するまで、ミクロ組織3D画像の各ボクセルの2値化ラベルの値を変更して以上の処理を繰り返す。解析装置1700は、累積報酬が収束したときのミクロ組織3D画像の各ボクセルxの2値化ラベルの値を最適値として、そのことを示す情報を出力する。
以上のように本実施形態では、解析装置1700は、ミクロ組織3D画像の各ボクセルxの2値化ラベルの値(硬質相か軟質相かを示す値)が変更されると、DP鋼に外部歪を与えた場合の、各ボクセルの応力および歪を、均質化法を用いて導出し、それらの代表値を導出する。解析装置1700は、各ボクセルの応力および歪の代表値を導出することを、予め設定されている外部歪をDP鋼に与えた場合のそれぞれについて実行する。解析装置1700は、各外部歪をDP鋼に与えた場合の、各ボクセルの応力および歪の代表値から、S-S曲線を導出する。解析装置1700は、S-S曲線から、DP鋼全体の引張強さおよび均一伸びと、DP鋼全体の穴広げ率とを導出する。解析装置1700は、DP鋼全体の引張強さ、均一伸び、および穴広げ率に基づいて累積報酬を導出する。解析装置1700は、累積報酬が収束するまで、ミクロ組織3D画像の各ボクセルの2値化ラベルの値を変更して以上の処理を繰り返す。解析装置1700は、累積報酬が収束したときのミクロ組織3D画像の各ボクセルxの2値化ラベルの値を最適値として、そのことを示す情報を出力する。
従って、本実施形態においても、第1の実施形態と同様に、空間階層間の物理現象を繋げることができる。よって、マクロな系の因子(DP鋼全体の引張強さ、均一伸び、および穴広げ率他)から、ミクロな系の因子(ミクロ組織形態、合金成分他)を、少数のデータからDP鋼の内部に生じる物理現象に従って導出することが可能になる。よって、物理現象で結ばれる原因と結果が、異なる空間階層に属する場合に、当該結果から当該原因を正確に推定することができる。
[変形例]
<第1の変形例>
本実施形態では、解析装置1900が、ミクロ組織3D画像の各ボクセルの相(軟質相または硬質相)を変更する場合を例に挙げて説明した。しかしながら、解析対象が金属材料である場合、変更する対象は、ミクロ組織に関する因子(物理量)であれば、どのような因子であってもよい。例えば、前述した制御因子(3次元のミクロ組織の形態・方位や、合金の添加量や、硬質相・軟質相の各々の配合量・形態分布・強度等)の少なくとも何れか1つを変更することができる。
<第1の変形例>
本実施形態では、解析装置1900が、ミクロ組織3D画像の各ボクセルの相(軟質相または硬質相)を変更する場合を例に挙げて説明した。しかしながら、解析対象が金属材料である場合、変更する対象は、ミクロ組織に関する因子(物理量)であれば、どのような因子であってもよい。例えば、前述した制御因子(3次元のミクロ組織の形態・方位や、合金の添加量や、硬質相・軟質相の各々の配合量・形態分布・強度等)の少なくとも何れか1つを変更することができる。
<第2の変形例>
本実施形態では、解析装置1900が3次元画像を取得する場合を例に挙げて説明したが、2次元画像を取得してもよい。
<第3の変形例>
本実施形態では、DP鋼の機械特性に関する因子(物理量)として、引張強さおよび均一伸びを例に挙げて説明した。しかしながら、DP鋼の機械特性に関する因子は、これらに限定されず、例えば、0.2%耐力や全伸びを用いてもよい。
<第4の変形例>
本実施形態では、DP鋼の破壊特性に関する因子(物理量)として、(穴広げ性を示す物理量の一例である)穴広げ率を用いる場合を例に挙げて説明した。しかしながら、破壊特性に関する因子は、穴広げ率に限定されない。また、必ずしも穴広げ率(破壊特性を表す物理量)を導出しなくてもよい。
本実施形態では、解析装置1900が3次元画像を取得する場合を例に挙げて説明したが、2次元画像を取得してもよい。
<第3の変形例>
本実施形態では、DP鋼の機械特性に関する因子(物理量)として、引張強さおよび均一伸びを例に挙げて説明した。しかしながら、DP鋼の機械特性に関する因子は、これらに限定されず、例えば、0.2%耐力や全伸びを用いてもよい。
<第4の変形例>
本実施形態では、DP鋼の破壊特性に関する因子(物理量)として、(穴広げ性を示す物理量の一例である)穴広げ率を用いる場合を例に挙げて説明した。しかしながら、破壊特性に関する因子は、穴広げ率に限定されない。また、必ずしも穴広げ率(破壊特性を表す物理量)を導出しなくてもよい。
<第5の変形例>
前述した本実施形態の説明において、解析装置1700は、2値化ラベルの値のミクロ組織のDP鋼を製造することができるか否かを判定してもよい。例えば、解析装置1700は、製造条件と各ボクセルのミクロ組織との関係を、例えば、実験や実操業や数値解析の結果から導出しておく。解析装置1700は、この関係から、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が製造可能であるか否かを判定する。この判定のタイミングは、状態導出部1702が、外部からの指示に基づいて、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更したタイミングとすることができる。この判定のタイミングは、各ボクセルにおける2値化ラベルの値の最適値が得られたタイミングでもよい。解析装置1700は、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が製造できないものである場合には、当該ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値では製造することができないことを報知してもよい。そして、解析装置1700は、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更して、本実施形態で説明した処理を行う。また、製造条件を前記価値関数の制約条件として、例えば、ラグランジュ未定乗数法により価値関数に付与し、拘束条件を考慮した最適化を行ってもよい。
前述した本実施形態の説明において、解析装置1700は、2値化ラベルの値のミクロ組織のDP鋼を製造することができるか否かを判定してもよい。例えば、解析装置1700は、製造条件と各ボクセルのミクロ組織との関係を、例えば、実験や実操業や数値解析の結果から導出しておく。解析装置1700は、この関係から、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が製造可能であるか否かを判定する。この判定のタイミングは、状態導出部1702が、外部からの指示に基づいて、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更したタイミングとすることができる。この判定のタイミングは、各ボクセルにおける2値化ラベルの値の最適値が得られたタイミングでもよい。解析装置1700は、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値が製造できないものである場合には、当該ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値では製造することができないことを報知してもよい。そして、解析装置1700は、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更して、本実施形態で説明した処理を行う。また、製造条件を前記価値関数の制約条件として、例えば、ラグランジュ未定乗数法により価値関数に付与し、拘束条件を考慮した最適化を行ってもよい。
<第6の変形例>
本実施形態では、解析対象がDP鋼である場合を例に挙げて説明した。しかしながら、解析対象は、DP鋼に限定されず、DP鋼以外の鋼材や、その他の金属材料を解析対象とすることができる。また、金属材料以外の材料(例えば、半導体)であってもよい。また、材料以外であってもよい。
本実施形態では、解析対象がDP鋼である場合を例に挙げて説明した。しかしながら、解析対象は、DP鋼に限定されず、DP鋼以外の鋼材や、その他の金属材料を解析対象とすることができる。また、金属材料以外の材料(例えば、半導体)であってもよい。また、材料以外であってもよい。
例えば、鉄道台車であってもよい。鉄道台車の場合は、エージェント(鉄道台車の設計者)は、環境(environment)である鉄道台車の図面上に、台車部品の配置・大きさ・機能等の変更(action)を加える。解析装置は、鉄道台車が走行する際の満たすべき輪軸、台車、および車両の横振動、ヨーイング、およびローリング等を記述する運動方程式群により、前記の横振動、ヨーイング、およびローリングの変化量を状態(state)として導出する。そして、解析装置は、横振動、ヨーイング、およびローリングの変化量の少なくとも1つから、鉄道車両の安全性、乗り心地等の指標値の変化分(増分または減分)を、これらの関係を示す数式を用いて、報酬(reward)として導出して評価する。この場合、台車部品(の配置・大きさ・機能等)が設計される。尚、鉄道台車が走行する際の満たすべき輪軸、台車、および車両の横振動、ヨーイング、およびローリング等を記述する運動方程式群は、例えば、特許文献4に記載されているもので実現することができる。特許文献4の明細書および図面の内容を全てここに援用する。
また、例えば、電気機器の部品の一つである鉄心であってもよい。鉄心の場合は、エージェント(電気機器の設計者)は、環境(environment)である鉄心の3次元画像におけるボクセル内の結晶方位に変更(action)を加える。解析装置は、マックスウェルの方程式(Maxwell's equations)に基づいて当該ボクセル内の磁束密度と渦電流を(励磁波形の一周期分)状態(state)として導出する。そして、解析装置は、当該励磁波形の一周期分の磁束密度と渦電流に基づいて鉄心の鉄損に-1を乗じた量の変化分(減分または増分)を、報酬(reward)として導出して評価する。この場合、鉄心の3次元画像におけるボクセル内の結晶方位が設計される。尚、鉄心の鉄損は、鉄心の形状によっても変わるので、鉄心を構成する材料(電磁鋼板等)のみを評価せずに、鉄心として評価することが必要な場合がある。
また、状態(本実施形態ではDP鋼の相(軟質相および硬質相)に対応するもの)を観測することができない場合には、部分観測マルコフ決定過程のアルゴリズムを適用し、環境に対して行動をとった場合の状態を推定する処理を加えて、本実施形態で説明した処理を行うようにしてもよい。
また、状態(本実施形態ではDP鋼の相(軟質相および硬質相)に対応するもの)を観測することができない場合には、部分観測マルコフ決定過程のアルゴリズムを適用し、環境に対して行動をとった場合の状態を推定する処理を加えて、本実施形態で説明した処理を行うようにしてもよい。
<第7の変形例>
本実施形態では、VR装置を用いて、VR空間におけるミクロ組織の分布を変更する操作を行い、当該操作の内容に合うように、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更することを試行錯誤的に行う場合を例に挙げて説明した。しかしながら、このようにする必要はない。例えば、変分法によってミクロ組織の分布を決定することができる。この場合、ミクロ組織の分布の与え方を相異ならせる必要がなくなる。このことは、ミクロ組織の分布以外の因子を第1の因子とした場合でも同じである。
<第8の変形例>
本実施形態においても、第1の実施形態で説明した変形例を採用することができる。
本実施形態では、VR装置を用いて、VR空間におけるミクロ組織の分布を変更する操作を行い、当該操作の内容に合うように、ミクロ組織3D画像の各ボクセルにおける2値化ラベルの値を変更することを試行錯誤的に行う場合を例に挙げて説明した。しかしながら、このようにする必要はない。例えば、変分法によってミクロ組織の分布を決定することができる。この場合、ミクロ組織の分布の与え方を相異ならせる必要がなくなる。このことは、ミクロ組織の分布以外の因子を第1の因子とした場合でも同じである。
<第8の変形例>
本実施形態においても、第1の実施形態で説明した変形例を採用することができる。
<その他の変形例>
尚、以上説明した本発明の実施形態は、コンピュータがプログラムを実行することによって実現することができる。また、前記プログラムを記録したコンピュータ読み取り可能な記録媒体及び前記プログラム等のコンピュータプログラムプロダクトも本発明の実施形態として適用することができる。記録媒体としては、例えば、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD-ROM、磁気テープ、不揮発性のメモリカード、ROM等を用いることができる。
また、以上説明した本発明の実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
本願は、2018年3月27日に、日本国に出願された特願2018-059579号に基づき優先権を主張し、その内容の全てをここに援用する。
尚、以上説明した本発明の実施形態は、コンピュータがプログラムを実行することによって実現することができる。また、前記プログラムを記録したコンピュータ読み取り可能な記録媒体及び前記プログラム等のコンピュータプログラムプロダクトも本発明の実施形態として適用することができる。記録媒体としては、例えば、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD-ROM、磁気テープ、不揮発性のメモリカード、ROM等を用いることができる。
また、以上説明した本発明の実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
本願は、2018年3月27日に、日本国に出願された特願2018-059579号に基づき優先権を主張し、その内容の全てをここに援用する。
本発明は、物理現象に従って得られる結果の原因を推定することに利用できる。例えば、本発明は、所望の機械特性を有する構造材料のミクロ組織を推定することに利用できる。
Claims (20)
- 第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出手段と、
前記第1の導出手段により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出手段と、
前記第2の導出手段により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定手段と、を有し、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とする解析システム。 - 前記第1の導出手段は、前記解析対象が従うべき物理現象に基づく数式を用いて前記第2の因子を導出することを特徴とする請求項1に記載の解析システム。
- 前記第2の導出手段は、前記解析対象が従うべき物理現象に基づく数式を用いて前記第3の因子を導出することを特徴とする請求項1または2に記載の解析システム。
- 前記決定手段は、前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たす場合に、当該第3の因子の導出のために用いられた前記第1の因子を、前記第3の因子に対応する前記第1の因子として決定することを特徴とする請求項1~3の何れか1項に記載の解析システム。
- 前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たさない場合に、新たな前記解析対象に対して、前記第1の導出手段による新たな前記第2の因子の導出と、前記第2の導出手段による新たな前記第3の因子の導出とが行われることを特徴とする請求項1~4の何れか1項に記載の解析システム。
- 前記新たな解析対象における前記構成要素の状態は、前記第1の導出手段により導出された最新の前記第2の因子であることを特徴とする請求項5に記載の解析システム。
- 前記決定手段は、前記第2の導出手段により導出された前記第3の因子に対する評価値が所定の条件を満たす場合、当該所定の条件を満たすまでに用いられた複数の前記第1の因子を、前記第3の因子に対応する前記第1の因子として決定することを特徴とする請求項6に記載の解析システム。
- 初期の前記解析対象を示す情報から、前記所定の条件を満たす前記第3の因子に対応する前記複数の第1の因子を導出する学習モデルを、強化学習を行うことにより作成する作成手段を有し、
前記作成手段は、前記第1の導出手段、および前記第2の導出手段を有することを特徴とする請求項7に記載の解析システム。 - 前記強化学習は、Q学習であることを特徴とする請求項8に記載の解析システム。
- 前記学習モデルを用いて、前記所定の条件を満たす前記第3の因子に対応する前記複数の第1の因子を推定する推定手段を有し、
前記作成手段と、前記推定手段とのそれぞれは、前記第1の導出手段、および前記第2の導出手段を有することを特徴とする請求項8または9に記載の解析システム。 - 前記解析対象は、製品であり、
前記第1の因子は、前記製品の構成要素の遷移の内容を示す因子であり、
前記第2の因子は、前記製品の構成要素の遷移後の状態を示す因子であり、
前記第3の因子は、前記製品の構成要素の集合に対して定まる因子であり、
前記推定手段により推定された前記第1の因子に基づいて、前記製品の製造工程が決定され、当該製造工程を用いて前記製品が製造されることを特徴とする請求項10に記載の解析システム。 - 前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料のミクロ組織の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記材料のミクロ組織の遷移後の状態を示す因子であり、
前記第3の因子は、前記材料全体における機械特性に関する因子であり、
前記推定手段により推定された前記第1の因子に基づいて、前記材料の製造工程が決定され、当該製造工程を用いて前記材料が製造されることを特徴とする請求項10または11に記載の解析システム。 - 前記第3の因子に対応する前記第1の因子が決定される際にマルコフ決定過程のアルゴリズムが用いられ、
マルコフ決定過程における状態は、前記解析対象の構成要素の状態であり、
マルコフ決定過程における行動は、前記第1の因子であり、
マルコフ決定過程における報酬は、前記第3の因子であり、
前記第2の因子は、前記第1の因子に従って遷移することを特徴とする請求項1~12の何れか1項に記載の解析システム。 - 前記解析対象は、製品であり、
前記第1の因子は、前記製品の構成要素の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記製品の構成要素の遷移後の状態を示す因子であり、
前記第3の因子は、前記製品の構成要素の集合に対して定まる因子であることを特徴とする請求項1~13の何れか1項に記載の解析システム。 - 前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料のミクロ組織の状態の遷移の内容を示す因子であり、
前記第2の因子は、前記材料のミクロ組織の遷移後の状態を示す因子であり、
前記第3の因子は、前記材料全体における機械特性に関する因子であることを特徴とする請求項1~14の何れか1項に記載の解析システム。 - 前記第2の導出手段は、前記第1の導出手段により導出された前記第2の因子で示される状態のミクロ組織に対して相変態が行われたミクロ組織に基づいて、前記第3の因子を導出することを特徴とする請求項15に記載の解析システム。
- 前記第3の因子に対応する前記第1の因子が決定される際にマルコフ決定過程のアルゴリズムが用いられ、
マルコフ決定過程における状態は、前記第2の因子であり、
マルコフ決定過程における行動は、前記第1の因子を変更することであり、
マルコフ決定過程における報酬は、前記第3の因子の変化分であり、
前記第1の因子を変更することにより、前記第2の因子の状態が遷移するものとすることを特徴とする請求項1~5の何れか1項に記載の解析システム。 - 前記解析対象は、ミクロ組織を有する材料であり、
前記第1の因子は、前記材料の複数の分割領域のそれぞれにおけるミクロ組織の状態を示す因子であり、
前記第2の因子は、前記材料の複数の分割領域のそれぞれにおける機械特性を示す因子であり、
前記第3の因子は、前記材料全体における機械特性を示す因子であることを特徴とする請求項1、2、3、4、5、および17の何れか1項に記載の解析システム。 - 第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出工程と、
前記第1の導出工程により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出工程と、
前記第2の導出工程により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定工程と、を有し、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とする解析方法。 - 第1の因子が解析対象に与えられた場合の前記解析対象における状態を示す第2の因子を、前記解析対象が従うべき物理現象に従って導出する第1の導出工程と、
前記第1の導出工程により導出された前記第2の因子に基づいて、第3の因子を、前記解析対象が従うべき物理現象に従って導出する第2の導出工程と、
前記第2の導出工程により導出された前記第3の因子を評価した結果に基づいて、当該第3の因子に対応する前記第1の因子を決定する決定工程と、をコンピュータに実行させ、
前記第3の因子は、前記第1の因子および前記第2の因子を原因として前記解析対象に生じる結果を示す因子であり、
前記第2の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子であり、
前記第3の因子は、前記解析対象の構成要素のそれぞれに対して個別に定まる因子ではなく、前記解析対象の構成要素の集合に対して定まる因子であることを特徴とするプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19776488.9A EP3702942A4 (en) | 2018-03-27 | 2019-03-25 | ANALYSIS SYSTEM, ANALYSIS METHOD AND PROGRAM |
| CN201980005517.0A CN112074839B (zh) | 2018-03-27 | 2019-03-25 | 解析系统、解析方法及计算机可读取存储介质 |
| US16/646,516 US11170146B2 (en) | 2018-03-27 | 2019-03-25 | Analysis system, analysis method, and program |
| JP2019567749A JP6705570B2 (ja) | 2018-03-27 | 2019-03-25 | 解析システム、解析方法、およびプログラム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018059579 | 2018-03-27 | ||
| JP2018-059579 | 2018-03-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019188941A1 true WO2019188941A1 (ja) | 2019-10-03 |
Family
ID=68058288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/012418 WO2019188941A1 (ja) | 2018-03-27 | 2019-03-25 | 解析システム、解析方法、およびプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11170146B2 (ja) |
| EP (1) | EP3702942A4 (ja) |
| JP (1) | JP6705570B2 (ja) |
| CN (1) | CN112074839B (ja) |
| WO (1) | WO2019188941A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021084608A1 (ja) * | 2019-10-29 | 2021-05-06 | 日本電信電話株式会社 | 制御装置、制御方法及びプログラム |
| JP2021109203A (ja) * | 2020-01-10 | 2021-08-02 | 日本製鉄株式会社 | 溶鋼流動制御装置、溶鋼流動制御方法、およびプログラム |
| JP2022096654A (ja) * | 2020-12-17 | 2022-06-29 | ノキア ソリューションズ アンド ネットワークス オサケユキチュア | 強化学習によって支援された動的リソース割り当て |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111008738B (zh) * | 2019-12-04 | 2023-05-30 | 云南锡业集团(控股)有限责任公司研发中心 | 基于多模态深度学习的Sn-Bi合金延伸率和抗拉强度的预测方法 |
| CN113515810B (zh) * | 2021-05-17 | 2022-08-26 | 中车长春轨道客车股份有限公司 | 基于可靠性和安全性分析的动车组转向架设计开发方法 |
| WO2024130292A1 (en) * | 2022-12-20 | 2024-06-27 | Chien, Chih-Yung | Smart bio-inspired material design platform |
| CN116611204B (zh) * | 2023-03-23 | 2023-10-20 | 哈尔滨工业大学 | 一种模拟含纳米孔洞的钢组织中马氏体相变的分子动力学建模方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006326683A (ja) * | 2005-05-20 | 2006-12-07 | Magma Giessereitechnologie Gmbh | 製造プロセスの最適化 |
| JP2008197852A (ja) | 2007-02-10 | 2008-08-28 | Phifit Kk | 塑性加工における被加工材の組織発展の解析装置、解析システムおよび記録媒体 |
| JP2011505030A (ja) * | 2007-10-31 | 2011-02-17 | シーメンス アクチエンゲゼルシヤフト | 技術システムの状態をコンピュータ支援のもとで探査する方法 |
| US20150170022A1 (en) | 2013-12-13 | 2015-06-18 | King Fahd University Of Petroleum And Minerals | Method and apparatus for characterizing composite materials using an artificial neural network |
| JP2015158863A (ja) * | 2014-02-25 | 2015-09-03 | マツダ株式会社 | 断熱層の設計方法、設計装置及び設計プログラム |
| WO2017011010A1 (en) | 2015-07-15 | 2017-01-19 | Friedman Ilan | Process for forming a descaling composition |
| JP2017091526A (ja) | 2015-11-04 | 2017-05-25 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 新規物質探索方法および装置 |
| JP2018059579A (ja) | 2016-10-06 | 2018-04-12 | 日産自動車株式会社 | 摩擦伝動装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8285522B1 (en) * | 2006-01-24 | 2012-10-09 | Vextec Corporation | Materials-based failure analysis in design of electronic devices |
| JP6242730B2 (ja) | 2014-03-31 | 2017-12-06 | 日本碍子株式会社 | 微構造解析方法、そのプログラム及び微構造解析装置 |
| EP3434552B1 (en) | 2016-03-23 | 2021-05-05 | Nippon Steel Corporation | Inspection system, inspection method and program |
| CN106650993B (zh) * | 2016-10-11 | 2020-07-03 | 中国兵器工业信息中心 | 一种基于马尔科夫决策过程的动态资源优化方法 |
| CN106529181B (zh) * | 2016-11-17 | 2019-02-22 | 国网四川省电力公司电力科学研究院 | 一种电力系统连锁故障脆弱线路的辨识方法及系统 |
| US10225772B2 (en) * | 2017-06-22 | 2019-03-05 | At&T Intellectual Property I, L.P. | Mobility management for wireless communication networks |
-
2019
- 2019-03-25 WO PCT/JP2019/012418 patent/WO2019188941A1/ja unknown
- 2019-03-25 CN CN201980005517.0A patent/CN112074839B/zh active Active
- 2019-03-25 JP JP2019567749A patent/JP6705570B2/ja active Active
- 2019-03-25 US US16/646,516 patent/US11170146B2/en active Active
- 2019-03-25 EP EP19776488.9A patent/EP3702942A4/en active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006326683A (ja) * | 2005-05-20 | 2006-12-07 | Magma Giessereitechnologie Gmbh | 製造プロセスの最適化 |
| JP2008197852A (ja) | 2007-02-10 | 2008-08-28 | Phifit Kk | 塑性加工における被加工材の組織発展の解析装置、解析システムおよび記録媒体 |
| JP2011505030A (ja) * | 2007-10-31 | 2011-02-17 | シーメンス アクチエンゲゼルシヤフト | 技術システムの状態をコンピュータ支援のもとで探査する方法 |
| US20150170022A1 (en) | 2013-12-13 | 2015-06-18 | King Fahd University Of Petroleum And Minerals | Method and apparatus for characterizing composite materials using an artificial neural network |
| JP2015158863A (ja) * | 2014-02-25 | 2015-09-03 | マツダ株式会社 | 断熱層の設計方法、設計装置及び設計プログラム |
| WO2017011010A1 (en) | 2015-07-15 | 2017-01-19 | Friedman Ilan | Process for forming a descaling composition |
| JP2017091526A (ja) | 2015-11-04 | 2017-05-25 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 新規物質探索方法および装置 |
| JP2018059579A (ja) | 2016-10-06 | 2018-04-12 | 日産自動車株式会社 | 摩擦伝動装置 |
Non-Patent Citations (5)
| Title |
|---|
| AZUMA MASAFUMI: "Model for the Prediction of Microstructures and Mechanical Properties of Cold-rolled High Strength Steels", NIPPON STEEL TECHNICAL REPORT, 2012, pages 45 - 51 |
| D.J.SROLOVITZG.S.GRESTM.P.ANDERSON: "Computer Simulation of Recrystallization-I. Homogeneous Nucleation and Growth", ACTA METAL, vol. 34, 1986, pages 1833 - 1845, XP024024629, DOI: 10.1016/0001-6160(86)90128-8 |
| H.MOULINECP.SUQUET: "A numerical method for computing the overall response of nonlinear composites with complex microstructure", COMPUT.METHODS APPL.MECH.ENGRG., vol. 157, 1998, pages 69 - 94 |
| J.ZEMANT.W.J.DE GEUSJ.VONDREJCR.H.J.PEERLINGSM.G.D.GEERS: "A finite element perspective on nonlinear FFT-based micromechanical simulations", INT.J.NUMER.METH.ENGNG., vol. 111, 2017, pages 903 - 926 |
| See also references of EP3702942A4 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021084608A1 (ja) * | 2019-10-29 | 2021-05-06 | 日本電信電話株式会社 | 制御装置、制御方法及びプログラム |
| JPWO2021084608A1 (ja) * | 2019-10-29 | 2021-05-06 | ||
| US11765036B2 (en) | 2019-10-29 | 2023-09-19 | Nippon Telegraph And Telephone Corporation | Control apparatus, control method and program |
| JP7347531B2 (ja) | 2019-10-29 | 2023-09-20 | 日本電信電話株式会社 | 制御装置、制御方法及びプログラム |
| JP2021109203A (ja) * | 2020-01-10 | 2021-08-02 | 日本製鉄株式会社 | 溶鋼流動制御装置、溶鋼流動制御方法、およびプログラム |
| JP7368725B2 (ja) | 2020-01-10 | 2023-10-25 | 日本製鉄株式会社 | 溶鋼流動制御装置、溶鋼流動制御方法、およびプログラム |
| JP2022096654A (ja) * | 2020-12-17 | 2022-06-29 | ノキア ソリューションズ アンド ネットワークス オサケユキチュア | 強化学習によって支援された動的リソース割り当て |
| JP7377847B2 (ja) | 2020-12-17 | 2023-11-10 | ノキア ソリューションズ アンド ネットワークス オサケユキチュア | 強化学習によって支援された動的リソース割り当て |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2019188941A1 (ja) | 2020-04-30 |
| CN112074839A (zh) | 2020-12-11 |
| CN112074839B (zh) | 2022-09-06 |
| EP3702942A1 (en) | 2020-09-02 |
| EP3702942A4 (en) | 2021-08-04 |
| US11170146B2 (en) | 2021-11-09 |
| JP6705570B2 (ja) | 2020-06-10 |
| US20200272775A1 (en) | 2020-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019188941A1 (ja) | 解析システム、解析方法、およびプログラム | |
| JP7028316B2 (ja) | 金属材料の設計支援方法、予測モデルの生成方法、金属材料の製造方法、及び設計支援装置 | |
| Gorguluarslan et al. | Uncertainty quantification and validation of 3D lattice scaffolds for computer-aided biomedical applications | |
| CN101361085B (zh) | 预测公式生成装置及预测公式生成方法 | |
| CN118586249B (zh) | 用于硬母线的加工制作方法及系统 | |
| JP5434837B2 (ja) | 品質予測装置、品質予測方法、プログラムおよびコンピュータ読み取り可能な記録媒体 | |
| Zhang et al. | Extracting dislocation microstructures by deep learning | |
| Haden et al. | Yield strength prediction of titanium alloys | |
| Huang et al. | High-resolution multiscale modeling of mechanical behavior of cold-drawn pearlitic steels | |
| Chou et al. | Engineering strength of fiber-reinforced soil estimated by swarm intelligence optimized regression system | |
| Wang et al. | Mesh-based digital image correlation method using non-uniform elements for measuring displacement fields with high gradient | |
| Whelan et al. | Machine learning-enabled uncertainty quantification for modeling structure–property linkages for fatigue critical engineering alloys using an ICME workflow | |
| Baby et al. | Robust, co-design exploration of multilevel product, material, and manufacturing process systems | |
| Bzowski et al. | Application of statistical representation of the microstructure to modeling of phase transformations in DP steels by solution of the diffusion equation | |
| Zimmerling et al. | A meta-model based approach for rapid formability estimation of continuous fibre reinforced components | |
| Mrzyglod et al. | Multiaxial high-cycle fatigue constraints in structural optimization | |
| JP7270454B2 (ja) | 設計支援システム、設計支援方法および設計支援プログラム | |
| Chehade et al. | Accelerating the discovery of new DP steel using machine learning-based multiscale materials simulations | |
| Sueki et al. | Inverse estimation of material model parameters using digital image correlation and ensemble-based four-dimensional variational methods | |
| Rosa et al. | Simple empirical software effort estimation model | |
| JP7540587B2 (ja) | 学習装置、予測装置、学習方法、予測方法およびプログラム | |
| Tak et al. | Parametrically upscaled constitutive and crack nucleation models for investigating the effects of specimen geometry and microstructure on fatigue crack nucleation in Ti alloys containing micro-texture regions | |
| Jin et al. | Distribution effects of secondary twin lamellae on the global and local behavior of hierarchically nanotwinned metals | |
| Zhai | Stress predictions in polycrystal plasticity using graph neural networks with subgraph training | |
| Zhang | Determination of material parameters by comparison of 3D simulations and 3D experiments |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19776488 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2019567749 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2019776488 Country of ref document: EP Effective date: 20200526 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |