WO2019176286A1 - 制御装置、制御方法、および、制御プログラム - Google Patents
制御装置、制御方法、および、制御プログラム Download PDFInfo
- Publication number
- WO2019176286A1 WO2019176286A1 PCT/JP2019/001744 JP2019001744W WO2019176286A1 WO 2019176286 A1 WO2019176286 A1 WO 2019176286A1 JP 2019001744 W JP2019001744 W JP 2019001744W WO 2019176286 A1 WO2019176286 A1 WO 2019176286A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- propagation delay
- field network
- unit
- communication
- delay time
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 24
- 238000004891 communication Methods 0.000 claims abstract description 78
- 238000005259 measurement Methods 0.000 claims abstract description 44
- 125000004122 cyclic group Chemical group 0.000 claims abstract description 8
- 238000001514 detection method Methods 0.000 claims abstract description 6
- 238000003745 diagnosis Methods 0.000 claims description 41
- 238000012545 processing Methods 0.000 claims description 18
- 238000012544 monitoring process Methods 0.000 claims description 10
- 238000010586 diagram Methods 0.000 description 11
- 230000005540 biological transmission Effects 0.000 description 10
- 230000004044 response Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000010485 coping Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40006—Architecture of a communication node
- H04L12/40019—Details regarding a bus master
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Programme control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM]
- G05B19/4185—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the network communication
- G05B19/4186—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the network communication by protocol, e.g. MAP, TOP
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40169—Flexible bus arrangements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L43/00—Arrangements for monitoring or testing data switching networks
- H04L43/08—Monitoring or testing based on specific metrics, e.g. QoS, energy consumption or environmental parameters
- H04L43/0805—Monitoring or testing based on specific metrics, e.g. QoS, energy consumption or environmental parameters by checking availability
- H04L43/0817—Monitoring or testing based on specific metrics, e.g. QoS, energy consumption or environmental parameters by checking availability by checking functioning
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L43/00—Arrangements for monitoring or testing data switching networks
- H04L43/08—Monitoring or testing based on specific metrics, e.g. QoS, energy consumption or environmental parameters
- H04L43/0852—Delays
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L69/00—Network arrangements, protocols or services independent of the application payload and not provided for in the other groups of this subclass
- H04L69/40—Network arrangements, protocols or services independent of the application payload and not provided for in the other groups of this subclass for recovering from a failure of a protocol instance or entity, e.g. service redundancy protocols, protocol state redundancy or protocol service redirection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/31—From computer integrated manufacturing till monitoring
- G05B2219/31135—Fieldbus
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/33—Director till display
- G05B2219/33342—Master slave, supervisor, front end and slave processor, hierarchical structure
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/34—Director, elements to supervisory
- G05B2219/34279—Pc, personal computer as controller
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/4026—Bus for use in automation systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Definitions
- the present invention relates to a technique for communicating control data at a predetermined cycle using a fieldbus system such as EtherCAT (registered trademark).
- the FA system includes a control device and a plurality of slave devices.
- the plurality of slave devices are a measuring instrument, a switch, a control driver, or the like, and a control target device is connected to the control driver.
- control device and the plurality of slave devices communicate control data using a fieldbus system.
- control device and the plurality of slave devices communicate control data in a preset control cycle (cyclic cycle).
- control cycle is set by a setting tool such as a PC connected to the control device. At this time, the control cycle is set according to the number and topology of a plurality of slave devices connected to the fieldbus.
- control system may not start normally.
- an object of the present invention is to provide a technique capable of more reliably realizing normal activation of a control system.
- the control device includes a communication management unit, a calculation unit, and a result output unit.
- the communication management unit manages data communication using cyclic communication according to a predetermined communication cycle for the field network.
- the calculation unit measures the propagation delay time from the received data of the propagation delay measurement data transmitted to the field network, and detects the operation state of the field network using the measurement result of the propagation delay time.
- a result output part outputs the detection result by a calculating part.
- the operation state of communication via the field network is detected and provided to the user before the start of the main operation of the control device.
- the arithmetic unit monitors the bandwidth load of the field network from the propagation delay time measurement unit that measures the propagation delay time from the reception data of the propagation delay measurement data, and the propagation delay time.
- a monitoring process execution unit is provided.
- the calculation unit includes a diagnosis processing execution unit that executes diagnosis of a cable used in the field network based on the reception state of the propagation delay measurement data.
- the calculation unit when the calculation unit receives an operation input of a break-in operation, the calculation unit performs a process for detecting the operation state of the field network.
- the operation status of the field network is detected in response to an operation input from the user.
- FIG. 1 is a diagram illustrating a schematic configuration of an apparatus in a control system.
- FIG. 2 is a block diagram illustrating a hardware configuration of the control device.
- FIG. 3 is a functional block diagram of the control device.
- FIG. 4 is a flowchart of the control method.
- 5A and 5B are diagrams illustrating an example of a diagnostic mode display screen.
- 6A and 6B are diagrams illustrating an example of a display screen of a diagnosis result.
- FIG. 3 is a functional block diagram of the control device.
- control device 10 includes a control unit 110, a calculation unit 120, a communication management unit 130, a communication driver 140, a user application processing unit 150, and a higher-level communication driver 160.
- the calculation unit 120 includes a propagation delay time measurement unit 121, a monitoring process execution unit 122, and a diagnosis process execution unit 123.
- the control unit 110 receives an operation input of a running-in from a user via the host communication driver 160.
- the control unit 110 outputs the operation input information for the leveling operation to the calculation unit 120 and the communication management unit 130.
- the propagation delay time measurement unit 121 of the calculation unit 120 receives the operation input of the leveling operation, generates measurement data of the propagation delay time, and outputs it to the communication management unit 130.
- the communication management unit 130 transmits the measurement data of the propagation delay time to the field network 30 (see FIGS. 1 and 2) via the communication driver 140. Then, the communication management unit 130 acquires the reception data of the actual measurement data returned from the field network 30 and outputs it to the calculation unit 120.
- the propagation delay time measurement unit 121 measures the propagation delay time from the received data.
- the monitoring process execution unit 122 calculates the bandwidth load using the communication cycle set by the user application processing unit 150 and the propagation delay time. If the received data cannot be obtained, the diagnosis processing execution unit 123 activates a diagnosis mode for the cables that make up the field network 30 and executes cable diagnosis.
- the calculation unit 120 generates result display data including these results and outputs the result display data to the control unit 110.
- the control unit 110 outputs the result display data to the personal computer 61 via the host communication driver 160, and the personal computer 61 displays the result display data (see FIGS. 5A and 5B). ).
- the processing of the calculation unit 120 can also be executed by the personal computer 61 (see FIG. 1).
- the control device 10 outputs the reception data of the propagation delay measurement data to the personal computer 61 via the host communication driver 160.
- the user can confirm the operation state of the field network 30 before starting the main operation of the control device 10.
- a control device, a control method, and a control program according to an embodiment of the present invention will be described with reference to the drawings.
- an FA (factory automation) system will be described as an example of the control system.
- FIG. 1 is a diagram showing a schematic configuration of an apparatus in a control system.
- the control system 1 includes a control device 10, a slave device 211, a slave device 212, a slave device 213, a field network 30, an information communication network 60, a personal computer 61, and a database device 62.
- the number of slave devices is not limited to this, and may be other numbers.
- the field network 30 is realized by connecting a plurality of slave devices 211, slave devices 212, and slave devices 213 by communication cables.
- the control device 10 is connected to the slave device 211 via the communication cable
- the slave device 211 is connected to the slave device 212 via the communication cable
- the slave device 212 is connected to the communication device.
- the control device 10 is connected to the slave device 212 via the communication cable, the slave device 211, and the communication cable.
- the control device 10 is connected to the slave device 213 via a communication cable, a slave device 211, a communication cable, a slave device 212, and a communication cable.
- the field network 30 is a network conforming to, for example, EtherCAT (registered trademark) as a network standard.
- the field network 30 is not limited to this, and the controller transmits data to all the slave devices in one frame to the slave devices logically connected to the ring network, and the slave devices May be any network that realizes time synchronization while performing “on the fly” on the received frame.
- the information communication network 60 is, for example, a network conforming to Ethernet (registered trademark) as a network standard.
- the control device 10, the personal computer 61, and the database device 62 are connected by an information communication network 60.
- the personal computer 61 has a control program editing tool installed therein.
- the personal computer 61 creates, edits, and outputs control programs for the control device 10, the slave device 211, the slave device 212, and the slave device 213.
- the personal computer 61 outputs a control program to the control device 10.
- a slave device 211, a slave device 212, a slave device 213 to be controlled, a control command for each slave device, and the like are described.
- the personal computer 61 stores a running program for running-in operation.
- the personal computer 61 outputs a running program for running-in operation to the control device 10 in response to an operation input from the user. Further, the personal computer 61 displays the diagnosis result of the field network 30 by the execution program of the running-in operation. An example of a specific display screen will be described later.
- the database device 62 stores, for example, a log of each device acquired from the control device 10.
- the database device 62 may store the above-described diagnosis result of the field network 30 and the past log of the coping method.
- control device 10 is realized by, for example, a PLC (Programmable Logic Controller).
- the control device 10 may be another device as long as it communicates control data and data for diagnosis of the field network 30 via the field network 30.
- the control device 10 generates control data to be communicated through the field network 30 using a control program from the personal computer 61, for example.
- control device 10 generates data for diagnosis of the field network 30 such as propagation delay measurement data based on a running-in operation program from the personal computer 61, for example.
- the slave device 211, the slave device 212, and the slave device 213 are realized by a measuring instrument such as a servo driver or a sensor, for example.
- these slave devices may be, for example, a robot device or a robot control device connected to the robot device.
- the control device 10, the slave device 211, the slave device 212, and the slave device 213 communicate control data according to a communication cycle set in advance by a control program or the like, and synchronize with a predetermined timing based on the control cycle. Perform operations and processes.
- control device 10 the slave device 211, the slave device 212, and the slave device 213 perform transmission / reception of propagation delay measurement data. Specifically, as the outbound process, the control device 10 transmits propagation delay measurement data to the slave device 211.
- the slave device 211 receives the propagation delay measurement data from the control device 10, writes a time stamp, and transmits it to the terminal-side slave device 212.
- the slave device 212 receives the propagation delay measurement data from the slave device 211, writes a time stamp, and transmits it to the terminal slave device 213.
- the slave device 213 When the slave device 213 receives data for actual measurement of propagation delay from the slave device 212, the slave device 213 writes a time stamp, returns to the slave device 212, and transmits it.
- the slave device 212 receives the propagation delay measurement data from the slave device 213, writes a time stamp, and transmits it to the slave device 211.
- the slave device 211 receives the propagation delay measurement data from the slave device 212, writes a time stamp, and transmits it to the control device 10.
- FIG. 2 is a block diagram illustrating a hardware configuration of the control device.
- the control device 10 includes a CPU 101, a memory 102, a storage medium 103, a transmission / reception unit 104, and a higher-level communication unit 105.
- a CPU 101, a memory 102, a storage medium 103, a transmission / reception unit 104, and an upper communication unit 105 are connected by a data bus 100.
- the CPU 101 implements each process of each functional block described later by reading the system program and the user application program stored in the storage medium 103 into the memory 102 and executing them.
- the user application program includes the above-described control program, running-in execution program, and the like.
- the memory 102 is realized by a volatile storage element such as DRAM or SRAM.
- the storage medium 103 is realized by a nonvolatile storage medium such as a magnetic storage medium or a flash memory, for example.
- the transmission / reception unit 104 is an interface of the field network 30 in the control device 10.
- the transmission / reception unit 104 performs transmission / reception (communication) of control data according to the cyclic cycle.
- the transmission / reception unit 104 transmits / receives propagation delay measurement data.
- the host communication unit 105 is an interface of the information communication network 60 in the control device 10 and executes communication with each device (personal computer 61, database device 62, etc.) of the host system described above.
- FIG. 3 is a functional block diagram of the control device.
- control device 10 includes a control unit 110, a calculation unit 120, a communication management unit 130, a communication driver 140, a user application processing unit 150, and a higher-level communication driver 160.
- the control unit 110 performs overall operation (processing) scheduling of the control device 10 and executes operation control of the calculation unit 120, operation control of the user application processing unit 150, and operation control of the calculation unit 12.
- the calculation unit 120 includes a propagation delay time measurement unit 121, a monitoring process execution unit 122, and a diagnosis process execution unit 123.
- the propagation delay time measuring unit 121 generates propagation delay measurement data in accordance with the run-in operation execution program and outputs the data to the communication management unit 130. Further, the propagation delay time measurement unit 121 acquires the reception data of the propagation delay measurement data via the communication management unit 130. The propagation delay time measuring unit 121 calculates the propagation delay time of each slave device and the propagation delay times of a plurality of slave device groups from the time stamp written in the received data.
- the monitoring process execution unit 122 calculates the bandwidth load status of the field network 30 from the propagation delay time according to the execution program of the break-in operation. Specifically, the monitoring process execution unit 122 calculates the bandwidth load status from the ratio of the propagation delay time of all frames transmitted within one period with respect to a preset communication period.
- the diagnostic processing execution unit 123 activates the cable diagnostic mode and executes the cable diagnosis. .
- the cable diagnosis a known method can be used.
- the calculation unit 120 generates a diagnosis result using the processing results of the propagation delay time measurement unit 121, the monitoring process execution unit 122, and the diagnosis process execution unit 123.
- the calculation unit 120 outputs the result to the control unit 110, and the control unit 110 outputs the diagnosis result to the personal computer 61 connected to the information communication network 60 via the host communication driver 160.
- the communication management unit 130 executes control data communication scheduling. In addition, the communication management unit 130 manages transmission / reception of propagation delay measurement data.
- the communication driver 140 executes control of the transmission / reception unit 104 and communicates control data via the field network 30 according to a cyclic cycle.
- the communication driver 140 communicates the propagation delay measurement data via the field network 30.
- the user application processing unit 150 executes a user application program including the above-described control program and a running-in execution program.
- control device 10 performs a break-in operation and generates a diagnosis result of the field network 30 before this operation.
- the control device 10 outputs the diagnosis result to the personal computer 61, and the personal computer 61 displays the diagnosis result.
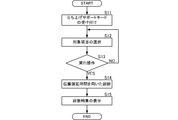
- FIG. 4 is a flowchart of the control method.
- the personal computer 61 accepts an operation input in the startup support mode (S11). Then, the personal computer 61 executes selection of a diagnosis target item (S12). When the personal computer 61 accepts an execution operation (S13: YES), the personal computer 61 instructs the control device 10 to execute diagnosis of the field network 30.
- the control device 10 measures the propagation delay time and executes a diagnosis using the propagation delay time (S14).
- the control device 10 outputs the diagnosis result to the personal computer 61, and the personal computer 61 displays the diagnosis result (S15).
- FIG. 5A and FIG. 5B are diagrams illustrating an example of a display screen in the diagnosis mode.
- a home screen for startup support as shown in FIG. 5A is displayed.
- the Home screen includes an icon for receiving an operation input for displaying an abnormal status, an icon for receiving an operation input for canceling an abnormality, an icon for receiving a selection for displaying system information, and startup support.
- An icon for accepting mode execution is displayed.
- the start-up support mode for detecting the operation status of the field network 30 is executed.
- the screen shown in FIG. 5B is displayed.
- the launch support screen includes a plurality of items to be executed, a box for selecting whether to execute the plurality of items, an icon for receiving an operation input for execution, and a Home screen.
- An icon for accepting an operation input to return to is displayed.
- the plurality of items include items such as “execute all items”, “execute break-in operation”, “execute cable diagnosis”, and “monitor bandwidth load information”. When the user selects a box corresponding to each of these items, the selected item is executed.
- control device 10 executes the run-in operation using the field network 30. At this time, propagation delay measurement data is transmitted and received.
- the control device 10 executes cable diagnosis for the field network 30. Specifically, if the measured data for propagation delay does not return within a predetermined time based on the communication cycle, the control device 10 determines that cable diagnosis is necessary and executes the cable diagnosis mode. When the propagation delay measurement data returns within a predetermined time based on the communication cycle, the control device 10 outputs a diagnosis result indicating that there is no problem with the cable.
- the control device 10 transmits / receives propagation delay measurement data and obtains a time stamp.
- the control device 10 calculates a propagation delay time from the time stamp, and calculates a bandwidth load from a ratio with respect to a preset communication cycle.
- This item is executed by selecting the execution icon after selection.
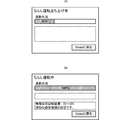
- 6A and 6B are diagrams illustrating an example of a display screen of a diagnosis result.
- the progress status of the leveling operation that is, the progress status of the diagnosis based on the selected item is displayed.
- the currently executed process and the currently known diagnosis result are displayed in the area below the progress status.
- the user can know how the field network 30 operates according to the setting of the control program before starting this operation. Thereby, normal starting of a control system is realizable more reliably.
- Control system 10 Control device 12: Computing unit 30: Field network 60: Information communication network 61: Personal computer 62: Database device 100: Data bus 101: CPU 102: Memory 103: Storage medium 104: Transmission / reception unit 105: Host communication unit 110: Control unit 120: Calculation unit 121: Propagation delay time measurement unit 122: Monitoring processing execution unit 123: Diagnosis processing execution unit 130: Communication management unit 140: Communication driver 150: User application processing unit 160: Host communication drivers 211, 212, 213: Slave device
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Environmental & Geological Engineering (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Quality & Reliability (AREA)
- Computer Security & Cryptography (AREA)
- Testing And Monitoring For Control Systems (AREA)
- Programmable Controllers (AREA)
Abstract
制御装置は、通信管理部、演算部、および、結果出力部を備える。通信管理部は、フィールドネットワークに対する所定の通信周期に準じたサイクリック通信を用いたデータ通信を管理する。演算部は、フィールドネットワークに送信された伝搬遅延の実測用データの受信データから伝搬遅延時間を測定し、伝搬遅延時間の測定結果を用いてフィールドネットワークの動作状態を検出する。結果出力部は、演算部による検出結果を出力する。
Description
本発明は、EtherCAT(登録商標)等のフィールドバスシステムを用いて、所定周期で制御データを通信する技術に関する。
現在、FA(ファクトリー オートメーション)システムが多く実用化されている。FAシステムは、例えば、特許文献1に示すように、制御装置と複数のスレーブ装置と備える。複数のスレーブ装置は、計測器、スイッチ、または、制御用ドライバ等であり、制御用ドライバには、制御対象機器が接続されている。
そして、例えば、制御装置と複数のスレーブ装置とは、フィールドバスシステムを用いて、制御データを通信する。この際、制御装置と複数のスレーブ装置とは、制御データを、予め設定された制御周期(サイクリック周期)に通信する。これにより、制御データの通信の定時性、リアルタイム性、および、高速通信を担保している。
通常、制御周期は、制御装置に接続されたPC等の設定ツールによって設定されている。この際、制御周期は、フィールドバスに接続される複数のスレーブ装置の数、トポロジーによって設定される。
しかしながら、設定ツールで設定した内容によっては、制御システムが正常に起動しないことがある。
したがって、本発明の目的は、制御システムの正常な起動をより確実に実現できる技術を提供することにある。
本開示の一例によれば、制御装置は、通信管理部、演算部、および、結果出力部を備える。通信管理部は、フィールドネットワークに対する所定の通信周期に準じたサイクリック通信を用いたデータ通信を管理する。演算部は、フィールドネットワークに送信された伝搬遅延の実測用データの受信データから伝搬遅延時間を測定し、伝搬遅延時間の測定結果を用いてフィールドネットワークの動作状態を検出する。結果出力部は、演算部による検出結果を出力する。
この構成では、制御装置の本動作の開始前に、フィールドネットワークを介した通信の動作状態が検出され、ユーザに提供される。
本開示の一例によれば、演算部は、伝搬遅延の実測用データの受信データから伝搬遅延時間の測定を行う伝搬遅延時間測定部と、伝搬遅延時間から、フィールドネットワークの帯域負荷の監視を行う監視処理実行部と、を備える。
この構成では、動作状態として、伝搬遅延時間とともに、帯域負荷が得られる。
本開示の一例によれば、演算部は、伝搬遅延の実測用データの受信状態に基づいて、フィールドネットワークに用いられるケーブルの診断を実行する診断処理実行部を備える。
この構成では、動作状態として、ケーブルの状態診断結果が得られる。
本開示の一例によれば、演算部は、ならし運転の操作入力を受け付けると、フィールドネットワークの動作状態の検出処理を実行する。
この構成では、ユーザからの操作の入力に応じて、フィールドネットワークの動作状態の検出が実行される。
この発明によれば、制御システムの正常な起動をより確実に実現できる。
以下、本発明の実施形態を、図を参照して説明する。
・適用例
まず、本発明の実施形態に係る制御装置の適用例について、図を用いて説明する。図3は、制御装置の機能ブロック図である。
まず、本発明の実施形態に係る制御装置の適用例について、図を用いて説明する。図3は、制御装置の機能ブロック図である。
図3に示すように、制御装置10は、制御部110、演算部120、通信管理部130、通信ドライバ140、ユーザアプリケーション処理部150、および、上位通信ドライバ160を備える。
演算部120は、伝搬遅延時間測定部121、監視処理実行部122、および、診断処理実行部123を備える。
制御部110は、上位通信ドライバ160を介して、ユーザからのならし運転の操作入力を受け付ける。制御部110は、ならし運転の操作入力情報を、演算部120および通信管理部130に出力する。
演算部120の伝搬遅延時間測定部121は、ならし運転の操作入力を受けて、伝搬遅延時間の実測用データを生成し、通信管理部130に出力する。
通信管理部130は、通信ドライバ140を介して、フィールドネットワーク30(図1、図2を参照。)に、伝搬遅延時間の実測用データを送信する。そして、通信管理部130は、フィールドネットワーク30から返ってきた実測用データの受信データを取得し、演算部120に出力する。
伝搬遅延時間測定部121は、受信データから伝搬遅延時間を測定する。監視処理実行部122は、ユーザアプリケーション処理部150によって設定された通信周期と、伝搬遅延時間とを用いて、帯域負荷を算出する。診断処理実行部123は、受信データを得られなければ、フィールドネットワーク30を構成するケーブルの診断モードを立ち上げ、ケーブル診断を実行する。
演算部120は、これらの結果を含む結果表示データを生成し、制御部110に出力する。制御部110は、上位通信ドライバ160を介して、結果表示データを、パーソナルコンピュータ61に出力し、パーソナルコンピュータ61は、結果表示データを表示する(図5(A),図5(B)参照。)。なお、この演算部120の処理は、パーソナルコンピュータ61(図1参照。)に実行させることも可能である。この場合、制御装置10は、伝搬遅延の実測用データの受信データを、上位通信ドライバ160を介して、パーソナルコンピュータ61に出力する。
これにより、ユーザは、制御装置10の本動作の起動前に、フィールドネットワーク30の動作状態を確認できる。
・構成例
本発明の実施形態に係る制御装置、制御方法、および、制御プログラムについて、図を参照して説明する。本実施形態では、制御システムとして、FA(ファクトリー オートメーション)システムを例に説明する。
本発明の実施形態に係る制御装置、制御方法、および、制御プログラムについて、図を参照して説明する。本実施形態では、制御システムとして、FA(ファクトリー オートメーション)システムを例に説明する。
図1は、制御システムにおける装置の概略構成を示す図である。図1に示すように、制御システム1は、制御装置10、スレーブ装置211、スレーブ装置212、スレーブ装置213、フィールドネットワーク30、情報通信用ネットワーク60、パーソナルコンピュータ61、および、データベース装置62を備える。なお、スレーブ装置の個数等は、これに限らず、他の個数であってもよい。
フィールドネットワーク30は、複数のスレーブ装置211、スレーブ装置212、および、スレーブ装置213を、通信ケーブルによって繋ぐことによって実現される。この際、図1に示すように、制御装置10は、通信ケーブルを介してスレーブ装置211に接続し、スレーブ装置211は、通信ケーブルを介してスレーブ装置212に接続し、スレーブ装置212は、通信ケーブルを介してスレーブ装置213に接続する。言い換えれば、制御装置10は、通信ケーブル、スレーブ装置211、および、通信ケーブルを介して、スレーブ装置212に接続する。また、制御装置10は、通信ケーブル、スレーブ装置211、通信ケーブル、スレーブ装置212、および、通信ケーブルを介して、スレーブ装置213に接続する。
フィールドネットワーク30は、例えば、ネットワーク規格として、EtherCAT(イーサキャット)(登録商標)等に準じたネットワークである。なお、フィールドネットワーク30は、これに限るものではなく、論理的にリングネットワークに接続したスレーブ装置に対して、コントローラが1個のフレームで全てのスレーブ装置宛にデータを送信し、且つ、スレーブ装置が受信フレームに対して「オンザフライ」を行いながら、時刻同期を実現するネットワークであればよい。
情報通信用ネットワーク60は、例えば、ネットワーク規格として、Ethernet(登録商標)に準じたネットワークである。制御装置10、パーソナルコンピュータ61、および、データベース装置62は、情報通信用ネットワーク60によって接続されている。
パーソナルコンピュータ61には、制御プログラムの編集ツール等がインストールされている。パーソナルコンピュータ61は、制御装置10、スレーブ装置211、スレーブ装置212、および、スレーブ装置213に対する制御プログラムの作成、編集、出力を行う。パーソナルコンピュータ61は、制御プログラムを制御装置10に出力する。この制御プログラムには、制御対象のスレーブ装置211、スレーブ装置212、および、スレーブ装置213と、各スレーブ装置に対する制御コマンド等が記述されている。
また、パーソナルコンピュータ61は、ならし運転の実行プログラムが記憶されている。パーソナルコンピュータ61は、ユーザからの操作入力に応じて、ならし運転の実行プログラムを、制御装置10に出力する。また、パーソナルコンピュータ61は、ならし運転の実行プログラムによるフィールドネットワーク30の診断結果を表示する。具体的な表示画面の一例は、後述する。
データベース装置62は、例えば、制御装置10から取得した各装置のログ等を記憶する。なお、データベース装置62は、上述のフィールドネットワーク30の診断結果およびその対処方法の過去ログを記憶してもよい。
制御装置10は、具体的には、例えば、PLC(Programmable Logic Contoroller)によって実現される。制御装置10は、フィールドネットワーク30を介して制御データ、および、フィールドネットワーク30の診断用のデータを通信する装置であれば、他の装置であってもよい。
制御装置10は、例えば、パーソナルコンピュータ61からの制御プログラムを用いて、フィールドネットワーク30で通信する制御データを生成する。
また、制御装置10は、例えば、パーソナルコンピュータ61からのならし運転の実行プログラムに基づいて、伝搬遅延の実測用データ等のフィールドネットワーク30の診断用のデータを生成する。
スレーブ装置211、スレーブ装置212、および、スレーブ装置213は、具体的には、例えば、サーボドライバ、センサ等の計測器等によって実現される。なお、これらのスレーブ装置は、例えば、ロボット装置またはロボット装置に接続されるロボット制御装置であってもよい。
制御装置10、スレーブ装置211、スレーブ装置212、および、スレーブ装置213は、制御プログラム等によって予め設定された通信周期に準じて制御データを通信し、当該制御周期に基づく所定のタイミングに同期して、動作および処理を実行する。
また、制御装置10、スレーブ装置211、スレーブ装置212、および、スレーブ装置213は、伝搬遅延の実測用データの送受信を行う。具体的には、行きの処理として、制御装置10は、伝搬遅延の実測用データを、スレーブ装置211に送信する。スレーブ装置211は、制御装置10からの伝搬遅延の実測用データを受信して、タイムスタンプを書き込み、末端側のスレーブ装置212に送信する。スレーブ装置212は、スレーブ装置211からの伝搬遅延の実測用データを受信して、タイムスタンプを書き込み、末端のスレーブ装置213に送信する。その後、帰りの処理として、スレーブ装置213は、スレーブ装置212からの伝搬遅延の実測用データを受信すると、タイムスタンプを書き込み、スレーブ装置212に折り返し、送信する。スレーブ装置212は、スレーブ装置213からの伝搬遅延の実測用データを受信して、タイムスタンプを書き込み、スレーブ装置211に送信する。スレーブ装置211は、スレーブ装置212からの伝搬遅延の実測用データを受信して、タイムスタンプを書き込み、制御装置10に送信する。
(制御装置のハードウェア構成)
図2は、制御装置のハードウェアの構成を示すブロック図である。
図2は、制御装置のハードウェアの構成を示すブロック図である。
図2に示すように、ハードウェアの構成として、制御装置10は、CPU101、メモリ102、記憶媒体103、送受信部104、および、上位通信部105を備える。制御装置10は、CPU101、メモリ102、記憶媒体103、送受信部104、および、上位通信部105は、データバス100によって接続されている。
CPU101は、記憶媒体103に記憶されているシステムプログラム、および、ユーザアプリケーションプログラムをメモリ102に読み出して実行することで、後述の各機能ブロックの各処理を実現する。ユーザアプリケーションプログラムには、上述の制御プログラム、ならし運転の実行プログラム等が含まれている。
メモリ102は、例えば、DRAMやSRAM等の揮発性記憶素子によって実現される。また、記憶媒体103は、例えば、磁気記憶媒体、フラッシュメモリ等の不揮発性記憶媒体によって実現される。
送受信部104は、制御装置10におけるフィールドネットワーク30のインターフェースである。送受信部104は、サイクリック周期に準じた制御データの送受信(通信)を実行する。また、送受信部104は、伝搬遅延の実測用データの送受信を実行する。
上位通信部105は、制御装置10における情報通信用ネットワーク60のインターフェースであり、上述の上位システムの各装置(パーソナルコンピュータ61、データベース装置62等)との間の通信を実行する。
(制御装置の機能ブロック)
図3は、制御装置の機能ブロック図である。
図3は、制御装置の機能ブロック図である。
図3に示すように、制御装置10は、制御部110、演算部120、通信管理部130、通信ドライバ140、ユーザアプリケーション処理部150、および、上位通信ドライバ160を備える。
制御部110は、制御装置10の全体の動作(処理)のスケジューリング等を行い、演算部120の動作制御、ユーザアプリケーション処理部150の動作制御、演算部12の動作制御を実行する。
演算部120は、伝搬遅延時間測定部121、監視処理実行部122、および、診断処理実行部123を備える。
伝搬遅延時間測定部121は、ならし運転の実行プログラムにしたがって、伝搬遅延の実測用データを生成し、通信管理部130に出力する。また、伝搬遅延時間測定部121は、通信管理部130を介して、伝搬遅延の実測用データの受信データを取得する。伝搬遅延時間測定部121は、受信データに書き込まれたタイムスタンプから、各スレーブ装置の伝搬遅延時間、および、複数のスレーブ装置群による伝搬遅延時間を算出する。
監視処理実行部122は、ならし運転の実行プログラムにしたがって、伝搬遅延時間から、フィールドネットワーク30の帯域負荷状況を算出する。具体的には、監視処理実行部122は、予め設定されている通信周期に対して、1周期内で送信した全フレームの伝搬遅延時間の割合から、帯域負荷状況を算出する。
診断処理実行部123は、伝搬遅延の実測用データを送信したにもかかわらず、通信周期に基づく所定の時間内に受信データを取得できなければ、ケーブル診断モードを起動させ、ケーブル診断を実行する。なお、ケーブル診断は、既知の方法を用いることができる。
演算部120は、伝搬遅延時間測定部121、監視処理実行部122、および、診断処理実行部123の処理結果を用いて、診断結果を生成する。演算部120は、制御部110に出力し、制御部110は、診断結果を、上位通信ドライバ160を介して、情報通信用ネットワーク60に接続されたパーソナルコンピュータ61に出力する。
通信管理部130は、制御データの通信のスケジューリングを実行する。また、通信管理部130は、伝搬遅延の実測用データの送受信の管理を実行する。
通信ドライバ140は、送受信部104の制御を実行し、サイクリック周期に準じて、制御データを、フィールドネットワーク30を介して通信する。また、通信ドライバ140は、伝搬遅延の実測用データを、フィールドネットワーク30を介して通信する。
ユーザアプリケーション処理部150は、上述の制御プログラムおよびならし運転の実行プログラムを含むユーザアプリケーションプログラムを実行する。
このような構成において、制御装置10は、本動作の前に、ならし運転を実行し、フィールドネットワーク30の診断結果を生成する。制御装置10は、この診断結果を、パーソナルコンピュータ61に出力し、パーソナルコンピュータ61は、診断結果を表示する。
図4は、制御方法のフローチャートである。
図4に示すように、パーソナルコンピュータ61は、立ち上げサポートモードの操作入力を受け付ける(S11)。そして、パーソナルコンピュータ61は、診断の対象項目の選択を実行する(S12)。パーソナルコンピュータ61は、実行の操作を受け付けると(S13:YES)、制御装置10に、フィールドネットワーク30の診断の実行を指示する。
制御装置10は、伝搬遅延時間を測定し、当該伝搬遅延時間を用いた診断を実行する(S14)。制御装置10は、診断結果を、パーソナルコンピュータ61に出力し、パーソナルコンピュータ61は、診断結果を表示する(S15)。
次に、診断モードの操作入力の表示画面の一例について説明する。図5(A)、図5(B)は、診断モードの表示画面の一例を示す図である。
パーソナルコンピュータ61の画面には、図5(A)に示すような、立ち上げのサポート用のHome画面が表示される。図5(A)に示すように、Home画面には、異常ステータスの表示の操作入力を受け付けるアイコン、異常解除の操作入力を受け付けるアイコン、システム情報の表示の選択を受け付けるためのアイコン、立ち上げサポートモードの実行を受け付けるアイコンが表示されている。
ユーザが、立ち上げサポートモードの実行を受け付けるアイコンを操作することによって、フィールドネットワーク30の動作状況を検出する立ち上げサポートモードが実行される。そして、立ち上げサポートモードの実行を受け付けると、図5(B)に示す画面が表示される。
図5(B)に示すように、立ち上げサポート画面には、実行する複数の項目、当該複数の項目を実行させるか否かを選択するボックス、実行の操作入力を受け付けるアイコン、および、Home画面に戻る操作入力を受け付けるアイコンが表示されている。複数の項目は、「全ての項目を実行する」、「ならし運転を実行する」、[ケーブル診断を実行する]、[帯域負荷情報を監視する]等の項目がある。ユーザによって、これらの項目のそれぞれに対応するボックスが選択されると、選択された項目が実行される。
例えば、「ならし運転を実行する」が選択されると、制御装置10は、フィールドネットワーク30を用いたならし運転を実行する。この際、伝搬遅延の実測用データの送受信を行う。
[ケーブル診断を実行する]が選択されると、制御装置10は、フィールドネットワーク30に対して、ケーブル診断を実行する。具体的には、制御装置10は、伝搬遅延の実測用データが、通信周期に基づく所定の時間内に戻ってこなければ、ケーブル診断が必要であると判定して、ケーブル診断モードを実行する。制御装置10は、伝搬遅延の実測用データが、通信周期に基づく所定の時間内に戻って来れば、ケーブルに問題無しとする診断結果を出力する。
[帯域負荷情報を監視する]が選択されると、制御装置10は、伝搬遅延の実測用データを送受信し、タイムスタンプを取得する。制御装置10は、タイムスタンプから伝搬遅延時間を算出し、予め設定されている通信周期に対する割合から、帯域負荷を算出する。
これの項目は、選択の後、実行のアイコンが選択されることによって、実行される。
次に、診断結果の表示画面の一例について説明する。図6(A)、図6(B)は、診断結果の表示画面の一例を示す図である。
図6(A)に示すように、ならし運転中は、ならし運転の進捗状況、すなわち、選択した項目に基づく診断の進捗状況が表示される。また、ならし運転中は、現在実行している処理、現在分かっている診断結果が、進捗状況の下の領域に表示される。
図6(B)に示すように、ならし運転が終了すると、ならし運転の進捗状況(100%完了したこと)が表示される。また、終了後は、診断結果が、進捗状況の下の領域に表示される。
このような表示を行うことによって、ユーザは、制御プログラムの設定によって、フィールドネットワーク30がどのように動作するかを、本動作の起動前に知ることができる。これにより、制御システムの正常な起動を、より確実に実現できる。
1:制御システム
10:制御装置
12:演算部
30:フィールドネットワーク
60:情報通信用ネットワーク
61:パーソナルコンピュータ
62:データベース装置
100:データバス
101:CPU
102:メモリ
103:記憶媒体
104:送受信部
105:上位通信部
110:制御部
120:演算部
121:伝搬遅延時間測定部
122:監視処理実行部
123:診断処理実行部
130:通信管理部
140:通信ドライバ
150:ユーザアプリケーション処理部
160:上位通信ドライバ
211、212、213:スレーブ装置
10:制御装置
12:演算部
30:フィールドネットワーク
60:情報通信用ネットワーク
61:パーソナルコンピュータ
62:データベース装置
100:データバス
101:CPU
102:メモリ
103:記憶媒体
104:送受信部
105:上位通信部
110:制御部
120:演算部
121:伝搬遅延時間測定部
122:監視処理実行部
123:診断処理実行部
130:通信管理部
140:通信ドライバ
150:ユーザアプリケーション処理部
160:上位通信ドライバ
211、212、213:スレーブ装置
Claims (6)
- フィールドネットワークに対する所定の通信周期に準じたサイクリック通信を用いたデータ通信を管理する通信管理部と、
前記フィールドネットワークに送信された伝搬遅延の実測用データの受信データから伝搬遅延時間を測定し、前記伝搬遅延時間の測定結果を用いて前記フィールドネットワークの動作状態を検出する演算部と、
前記演算部による検出結果を出力する結果出力部と、
を備える、制御装置。 - 前記演算部は、
前記伝搬遅延の実測用データの受信データから前記伝搬遅延時間の測定を行う伝搬遅延時間測定部と、
前記伝搬遅延時間から、前記フィールドネットワークの帯域負荷の監視を行う監視処理実行部と、
を備える、請求項1に記載の制御装置。 - 前記演算部は、
前記伝搬遅延の実測用データの受信状態に基づいて、前記フィールドネットワークに用いられるケーブルの診断を実行する診断処理実行部を備える、
請求項1または請求項2に記載の制御装置。 - 前記演算部は、
ならし運転の操作入力を受け付けると、前記フィールドネットワークの動作状態の検出処理を実行する、
請求項1乃至請求項3のいずれかに記載の制御装置。 - フィールドネットワークに対する所定の通信周期に準じたサイクリック通信を用いたデータ通信を管理する通信管理処理と、
前記フィールドネットワークに送信された伝搬遅延の実測用データの受信データから伝搬遅延時間を測定し、前記伝搬遅延時間の測定結果を用いて前記フィールドネットワークの動作状態を検出する演算処理と、
前記演算部による検出結果を出力する結果出力処理と、
を有する、制御方法。 - フィールドネットワークに対する所定の通信周期に準じたサイクリック通信を用いたデータ通信を管理する通信管理処理と、
前記フィールドネットワークに送信された伝搬遅延の実測用データの受信データから伝搬遅延時間を測定し、前記伝搬遅延時間の測定結果を用いて前記フィールドネットワークの動作状態を検出する演算処理と、
前記演算部による検出結果を出力する結果出力処理と、
を、演算処理装置に実行させる、制御プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201980003959.1A CN111033400B (zh) | 2018-03-13 | 2019-01-22 | 控制装置、控制方法以及控制程序的记忆媒体 |
| EP19766943.5A EP3767407B1 (en) | 2018-03-13 | 2019-01-22 | Field bus system diagnosis using propagation delay measurements |
| US16/640,057 US11092945B2 (en) | 2018-03-13 | 2019-01-22 | Control device, control method, and non-transitory storage medium storing control program |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-045124 | 2018-03-13 | ||
| JP2018045124A JP6969454B2 (ja) | 2018-03-13 | 2018-03-13 | 制御装置、制御方法、および、制御プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019176286A1 true WO2019176286A1 (ja) | 2019-09-19 |
Family
ID=67908315
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/001744 WO2019176286A1 (ja) | 2018-03-13 | 2019-01-22 | 制御装置、制御方法、および、制御プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11092945B2 (ja) |
| EP (1) | EP3767407B1 (ja) |
| JP (1) | JP6969454B2 (ja) |
| CN (1) | CN111033400B (ja) |
| WO (1) | WO2019176286A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6969455B2 (ja) * | 2018-03-13 | 2021-11-24 | オムロン株式会社 | 制御装置、制御システム、制御方法、および、制御プログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10133966A (ja) * | 1996-10-30 | 1998-05-22 | Hitachi Ltd | プロセス入出力装置 |
| JP2012060207A (ja) * | 2010-09-06 | 2012-03-22 | Hitachi Industrial Equipment Systems Co Ltd | 通信制御装置及び通信・制御システム |
| JP2014146070A (ja) | 2013-01-25 | 2014-08-14 | Omron Corp | 制御装置、制御方法、およびプログラム |
| JP2017117267A (ja) * | 2015-12-25 | 2017-06-29 | 横河電機株式会社 | プロセス制御システム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19831405A1 (de) * | 1998-07-13 | 2000-01-20 | Siemens Ag | Steuerungssystem mit einem Personalcomputer |
| US7370110B2 (en) * | 2000-04-18 | 2008-05-06 | Hoshiko Llc | Method and system for operating a network server to discourage inappropriate use |
| US7460560B2 (en) * | 2001-10-17 | 2008-12-02 | Siemens Aktiengesellschaft | Method for operating an end-user of an isochronous cyclical communication system |
| US7631229B2 (en) * | 2006-04-24 | 2009-12-08 | Freescale Semiconductor, Inc. | Selective bit error detection at a bus device |
| US8072999B1 (en) * | 2007-05-08 | 2011-12-06 | Motion Engineering Inc. | Method and system for removing and returning nodes in a synchronous network |
| DE502007006120D1 (de) * | 2007-09-05 | 2011-02-10 | Siemens Ag | Hochverfügbares Kommunikationssystem |
| US9112751B1 (en) * | 2010-02-02 | 2015-08-18 | Qualcomm Incorporated | Distributed bandwidth control in a communication network |
| CN101950175B (zh) * | 2010-10-21 | 2012-07-04 | 广州数控设备有限公司 | 一种基于工业以太网的高速现场总线实现方法 |
| DE102012101957B3 (de) * | 2012-03-08 | 2013-05-29 | Softing Ag | Busteilnehmer-Einrichtung zum Anschluss an einen linienredundanten, seriellen Datenbus und Verfahren zur Steuerung der Kommunikation eines Busteilnehmers mit einem linienredundanten, seriellen Datenbus |
| CN104126155B (zh) * | 2012-03-15 | 2017-06-09 | 欧姆龙株式会社 | 控制装置、信息处理装置、控制方法 |
| JP6399136B1 (ja) * | 2017-03-31 | 2018-10-03 | オムロン株式会社 | 制御装置、制御プログラム、および制御システム |
-
2018
- 2018-03-13 JP JP2018045124A patent/JP6969454B2/ja active Active
-
2019
- 2019-01-22 US US16/640,057 patent/US11092945B2/en active Active
- 2019-01-22 CN CN201980003959.1A patent/CN111033400B/zh active Active
- 2019-01-22 EP EP19766943.5A patent/EP3767407B1/en active Active
- 2019-01-22 WO PCT/JP2019/001744 patent/WO2019176286A1/ja unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10133966A (ja) * | 1996-10-30 | 1998-05-22 | Hitachi Ltd | プロセス入出力装置 |
| JP2012060207A (ja) * | 2010-09-06 | 2012-03-22 | Hitachi Industrial Equipment Systems Co Ltd | 通信制御装置及び通信・制御システム |
| JP2014146070A (ja) | 2013-01-25 | 2014-08-14 | Omron Corp | 制御装置、制御方法、およびプログラム |
| JP2017117267A (ja) * | 2015-12-25 | 2017-06-29 | 横河電機株式会社 | プロセス制御システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3767407A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3767407A1 (en) | 2021-01-20 |
| US20200225645A1 (en) | 2020-07-16 |
| CN111033400A (zh) | 2020-04-17 |
| CN111033400B (zh) | 2023-02-21 |
| EP3767407B1 (en) | 2023-07-19 |
| EP3767407A4 (en) | 2021-11-10 |
| JP6969454B2 (ja) | 2021-11-24 |
| US11092945B2 (en) | 2021-08-17 |
| JP2019159753A (ja) | 2019-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10908579B2 (en) | Controller, control program, and control system | |
| CN110050237B (zh) | 数据收集装置、数据收集方法及记录介质 | |
| US9984244B2 (en) | Controller, information processing apparatus, and recording medium | |
| US20170068229A1 (en) | Control system, method, program, and information processing device | |
| WO2014200070A1 (ja) | 情報処理装置、情報処理装置の制御方法および制御プログラム | |
| US20140236914A1 (en) | Controller, information processing apparatus, and recording medium | |
| US8977534B2 (en) | Controller support apparatus, controller support program executed on the apparatus, storage medium storing the program, and method of estimating execution time of control program | |
| US20130131833A1 (en) | Method, computer program, computer-readable medium and processing unit for controlling field devices | |
| JP6998781B2 (ja) | 故障診断システム | |
| CN108376111B (zh) | 信息处理装置、信息处理方法和计算机可读取的存储介质 | |
| US10007633B2 (en) | Field bus coupler for connecting input/output modules to a field bus, and method of operation for a field bus coupler | |
| JP7067406B2 (ja) | 制御システム、制御装置および制御方法 | |
| EP2533114A1 (en) | Controller support device, controller support program to be executed in said device, recording medium storing said program, and method for estimating execution duration of control program | |
| WO2019176286A1 (ja) | 制御装置、制御方法、および、制御プログラム | |
| WO2019176287A1 (ja) | 制御装置、制御システム、制御方法、および、制御プログラム | |
| US10890888B2 (en) | Control apparatus, control program, control system, and control method | |
| EP3564766A1 (en) | Support apparatus, support program and setting method | |
| US12009914B2 (en) | Control system, communication control method of control system, and control device | |
| WO2023228357A1 (ja) | プログラマブルロジックコントローラ、制御システム、データ収集方法及びプログラム | |
| US11226603B2 (en) | Automation system for process automation and a corresponding method | |
| CN104570826A (zh) | 用于再现自动化设备的程序进程的方法 | |
| JP2024093071A (ja) | 制御システム診断装置、制御システム診断方法、及び、制御システム診断プログラム | |
| CN111868638A (zh) | 安全控制系统及安全控制系统的控制方法 | |
| JP2019207475A (ja) | 制御装置およびその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19766943 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019766943 Country of ref document: EP Effective date: 20201013 |