WO2019102769A1 - 車両制御システム - Google Patents
車両制御システム Download PDFInfo
- Publication number
- WO2019102769A1 WO2019102769A1 PCT/JP2018/039320 JP2018039320W WO2019102769A1 WO 2019102769 A1 WO2019102769 A1 WO 2019102769A1 JP 2018039320 W JP2018039320 W JP 2018039320W WO 2019102769 A1 WO2019102769 A1 WO 2019102769A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- unit
- control system
- matching
- estimated position
- Prior art date
Links
- 238000005259 measurement Methods 0.000 claims description 26
- 238000012545 processing Methods 0.000 claims description 22
- 238000000034 method Methods 0.000 description 48
- 230000006870 function Effects 0.000 description 9
- 230000005856 abnormality Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 239000012212 insulator Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000005055 memory storage Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000001502 supplementing effect Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or vehicle trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or vehicle trains
-
- B61L15/0058—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/0038—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L9/00—Electric propulsion with power supply external to the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60M—POWER SUPPLY LINES, AND DEVICES ALONG RAILS, FOR ELECTRICALLY- PROPELLED VEHICLES
- B60M1/00—Power supply lines for contact with collector on vehicle
- B60M1/12—Trolley lines; Accessories therefor
- B60M1/28—Manufacturing or repairing trolley lines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or vehicle trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or vehicle trains
- B61L25/025—Absolute localisation, e.g. providing geodetic coordinates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or vehicle trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or vehicle trains
- B61L25/026—Relative localisation, e.g. using odometer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or vehicle trains or setting of track apparatus
- B61L25/06—Indicating or recording the setting of track apparatus, e.g. of points, of signals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/70—Interactions with external data bases, e.g. traffic centres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning, or like safety means along the route or between vehicles or vehicle trains
- B61L23/04—Control, warning, or like safety means along the route or between vehicles or vehicle trains for monitoring the mechanical state of the route
- B61L23/041—Obstacle detection
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Definitions
- the present invention relates to a vehicle control system, and is suitably applied to, for example, a vehicle control system that estimates the position of a vehicle.
- positional information of the vehicle is essential.
- a position correction means for resetting the accumulated error a ground element having its own position information stored in advance is installed in the gauge, and means for reading out the position information when the vehicle passes above is the above-mentioned odometry It is widely used along with. Although this measure is effective for correcting the estimated position, it is inevitable that errors in the estimated position will accumulate again after the correction. For this reason, in order to keep the error of the estimated position within the range necessary for the operation control of the vehicle, it is necessary to lay the ground child continuously at a certain interval (for example, several hundred meters). Cost and so on.
- the relationship between the shape of the trolley wire for supplying power to the vehicle and the absolute position is stored in the database in advance, and the shape of the trolley wire acquired during traveling is compared with the contents of the database to obtain the absolute value of the vehicle.
- a method of identifying the position is disclosed (see Patent Document 1).
- an angle sensor provided in the pantograph is mentioned as a method of acquiring the shape of the trolley wire while traveling.
- Patent Document 3 realizes highly accurate and highly reliable position estimation because it relies on the number and intervals of small sleepers, ladders, and the like to detect from a vehicle traveling at high speed.
- a sensor for example, a sensor with a high scan frequency
- a sensor with a high scan frequency capable of precisely detecting external world information and high-speed processing according to it, and a case of skipping a mark.
- the present invention has been made in consideration of the above points, and the position of the vehicle can be made highly accurate without newly installing a ground element or an alternative ground facility and without using a highly accurate sensor. It is intended to propose a vehicle control system that can be estimated.
- data indicating a three-dimensional shape of a sensing unit provided in a vehicle and measuring a three-dimensional shape of an object and a structure provided in advance near a track along which the vehicle travels A matching process is performed between a plurality of pieces of structure information in which a group and position information indicating the position of the structure are associated, and a data group indicating the three-dimensional shape of the object measured by the sensing unit;
- a matching unit that specifies the position of the vehicle, and an estimated position determination unit that uses the position specified by the matching unit as a reference position and determines an estimated position of the vehicle based on the reference position.
- the matching process is performed using the data group indicating the three-dimensional shape, so the position of the vehicle can be estimated with high accuracy.
- 100 generally indicates a vehicle control system according to a first embodiment.
- the vehicle control system 100 is configured to include the vehicle 101.
- the vehicle 101 is supplied with power from an electric path facility provided along the track 102 and travels on the track 102.
- Typical components of the electric circuit installation include a trolley wire 103 in contact with the vehicle 101 by a pantograph, a hinge wire 104 and a hanger 105 for supporting the trolley wire 103 for suspension, and a support 106 and an insulator 107 for supporting them.
- the electric circuit installation is composed of various elements such as tension adjusters, feeder branches, insulators for insulation and the like.
- these components constituting the electric circuit facility above the vehicle 101 are collectively referred to as “overhead wire”.
- the vehicle 101 includes a sensing unit 108, map information 109, a matching unit 110, an estimated position determination unit 111, a travel distance measurement unit 112, and a control unit 113.
- the sensing unit 108 scans the overhead wire with LIDAR (Light Detection and Ranging), measures the three-dimensional shape of the overhead wire, and transmits data (measurement data) of the three-dimensional shape to the matching unit 110.
- LIDAR Light Detection and Ranging
- LIDAR is a device that irradiates a target with a laser and measures the distance to the target by receiving its reflection. From that principle, the accuracy of distance measurement is relatively high, such as several mm to several cm.
- the surface shape of the object can be captured as a collection of fine points (point group) by changing the direction of irradiation periodically at high speed such as several tens Hz, with one straight advancing laser as a basic unit. Therefore, the measurement data described above is data (data group) representing the three-dimensional shape of the overhead wire as a point group.
- LIDAR of the sensing unit 108 a three-dimensional LIDAR in which the direction of irradiation can be three-dimensionally changed is assumed.
- LIDAR also has a two-dimensional LIDAR that changes the irradiation direction in a plane, and even if it is used singly or in combination, the surface shape of the object is similarly used (using three-dimensional LIDAR Since the amount of information that can be acquired at one time is smaller than in the case where the information is acquired, the contents described below can be implemented similarly.
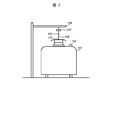
- the vehicle 101, the sensing unit 108, and the overhead wires (the trolley wire 103, the hinge wire 104, the hanger 105, the support 106, the insulator 107) of FIG. The positional relationship will be described in detail.
- the LIDAR is installed in the vehicle 101 so that the overhead wire can be scanned from an oblique direction centering on the contact point of the pantograph and the trolley wire 103.
- This is an idea that it is advantageous for the subsequent processing (matching processing described in FIG. 5) to capture more information of the feature points of the overhead wire, and to capture as many components of the overhead wire as possible. It is for. For example, when scanning from the position immediately below the trolley wire 103, in principle, the hanger 105 and the hinge wire 104 hanging the trolley wire 103 in the vertical direction are hidden behind the trolley wire 103, and the scan does not extend.
- the sensing unit 108 is provided at a position deviated from the position immediately below the trolley wire 103 and scanning obliquely from that position, the hanger 105 periodically tensioned and the overhead wire 104 periodically showing deflection.
- the scan can extend to the side of the and capture their features into the measurement data.
- the support 106 is usually made of a strong material such as a steel frame because it needs to support all the underlying structures including the hinge wire 104 and the trolley wire 103, and the size is extremely large among the structures of the wire. . For this reason, LIDAR is relatively easy to capture its three-dimensional shape. Since there is no fear of bending or shaking like electric wires, it can be said that each time the vehicle 101 travels, it can be caught by scanning by LIDAR, as well as relatively less overlooked each time.
- the supports 106 are usually built at intervals of several hundred meters.
- the map information 109 is a database in which the three-dimensional shape of the overhead wire across the trajectory 102 is stored in advance in association with the position information.
- a vehicle equipped with a LIDAR similar to or higher in resolution than the sensing unit 108 may be run in advance along the track, and the measurement data may be stored (processed as necessary).
- the correspondence between the three-dimensional shape obtained by measurement and the position can be realized by combining, for example, a method capable of measuring an absolute position with an error of about several tens of cm, such as a differential global positioning system (DGPS).
- DGPS differential global positioning system
- the method of creating a database is not limited to this as long as the same result as that obtained by this means is obtained.
- the map information 109 is information of a three-dimensional shape over the trajectory 102, the size of the data is relatively large.
- the method of storing the data is not particularly limited, but in the present embodiment, it is stored in a secondary storage device (a magnetic disk, an optical disk, a flash memory storage device, etc. and is not shown). Do. In the processing of the matching unit 110 described later, the map information 109 is read out and used on the main storage unit (not shown) for the necessary section.
- the data of the three-dimensional shape is constituted by X, Y, Z representing the coordinate system of the three-dimensional space and the value P at each point.
- X, Y, and Z are coordinates of each point obtained by dividing the three-dimensional space into a grid with a fineness (for example, several cm) sufficient to express the three-dimensional shape of the component of the overhead wire as a point group.
- the value P is a binary value representing the presence or absence of a point. For convenience, “1” indicates that there is a point, and “0” indicates that there is no point.
- a three-dimensional shape can be represented by a point group.
- the X, Y, and Z axes do not necessarily have to be orthogonal to each other at 90 degrees, and may be linearly independent so as to represent a three-dimensional space. For example, if X is taken along the trajectory 102, Y is taken across the trajectory, and Z is taken along the height, the value of X directly corresponds to the position on the trajectory 102. It is useful to describe the three-dimensional space along the 102 line.
- the matching unit 110 Among the three-dimensional shape data (map data) of the overhead wire stored in advance that is read from the map information 109, the matching unit 110 most closely matches the measurement data of the three-dimensional shape of the overhead wire received from the sensing unit 108. It is a means to identify one and identify the corresponding position. The identified position is output to the estimated position determination unit 111. Specific contents of processing will be described later with reference to FIGS. 4 and 5.
- the estimated position determination unit 111 is a unit that estimates the position of the vehicle 101 (determines the estimated position) from the position specified by the matching unit 110 and the travel distance of the vehicle 101 determined by the travel distance measurement unit 112 described below. is there. The contents of specific processing will be described later with reference to FIG.
- the determined estimated position is transmitted to the control unit 113.
- the travel distance measurement unit 112 measures the travel distance of the vehicle 101 and transmits the measured travel distance to the estimated position determination unit 111.
- the means for measuring the travel distance is not particularly limited.
- a means for calculating the travel distance by counting the number of revolutions of the wheel and multiplying it by the wheel diameter stored in advance is often used in a railway vehicle as described in the background art, and for example, the means is assumed.
- Another method is to calculate the travel distance by integrating the output of the speed sensor.
- the control unit 113 is an application of vehicle control using the estimated position of the vehicle 101.
- an automatic operation system ATO: Automatic Train Operation
- ATO Automatic Train Operation
- TASC Train Automatic Stopping-position Control
- the sensing unit 108 When the sensing unit 108 is mounted using LIDAR having ranging accuracy of several mm to several cm and the map information 109 is created, it is determined by the estimated position determination unit 111 unless the matching unit 110 reduces the amount of information.
- the estimated position can be expected to withstand the use of ATO with these functions.
- a signal system (ATP: Automatic Train Protection) that controls a brake to secure a safe distance between vehicles is also an example of an application using the estimated position of the vehicle 101.
- the sensing unit 108, the matching unit 110, the estimated position determination unit 111, the travel distance measurement unit 112, and the control unit 113 are CPU (Central Processing Unit)
- the program may be realized by reading and executing the program in the main storage (software), or by hardware such as a dedicated circuit, or by a combination of software and hardware. Good.
- some or all of the functions of the vehicle 101 may be realized by a computer that can communicate with the vehicle 101.
- steps S401 to S406 are executed by the matching unit 110. Each processing will be described below.
- step S401 the matching unit 110 determines a section on the trajectory 102 to which the subsequent processing is applied.
- the reason for determining the section is to read the map (map data) of the three-dimensional shape of the overhead line from the map information 109 by the amount of the section on the main storage device in the subsequent step S402. For this reason, how to select a section depends on the balance between the size of map data and the capacity of the main storage, but for practical purposes, for example, between stations is defined as one section and the map between the next stations while stopping at the station Reading the data is preferable because it is not necessary to read map data anew while traveling.
- step S402 the matching unit 110 reads map data from the map information 109 into the main storage device for the section determined in step S401.
- step S403 the matching unit 110 determines which range of the map data read on the main storage device is to be compared with the measurement data read from the sensing unit 108 in the next step S404 (setting of matching range) .
- step S405 the purpose of the comparison is to specify a candidate for the position of the vehicle 101 (vehicle position). For this reason, the track 102 on which the vehicle 101 travels is determined, and the track 102 predicts that the vehicle 101 is currently positioned within a reasonable range, as long as the vehicle 101 does not move rapidly from the position observed last time.
- the above predetermined range can be specified.
- the present processing is provided with the intention of narrowing the map data used for comparison with the measurement data in advance to this reasonable range and reducing the amount of calculation in the subsequent step S405.
- the way to determine the range is, for example, a loop from step S407 to step S403 after step S406 of specifying a vehicle position candidate as will be described later, so based on the vehicle position once specified in step S406, From that point, it can be determined by taking into consideration the distance that the vehicle 101 can travel in the cycle of the loop (for example, 100 ms).
- the range is set to [x0, x0 + 2 m] because it is about 2 m to travel for 100 ms.
- the information of the candidate of the position specified by step S406 does not exist at the time of the first execution of step S403, what is necessary is just to define a range on the basis of some initial position information, such as a position of a starting point station.
- step S404 the matching unit 110 receives the measurement data of the overhead wire measured by LIDAR from the sensing unit 108, and reads the data into the main storage device.
- the measurement data is compared with the map data read in the previous step S402 in the subsequent step S405, a conversion process is also performed simultaneously to make the formats of the two data comparable.
- step S404 calculates many times in the loop from step S403 to step S407, the map data is read in step S402 prior to converting the format of measurement data according to the format of map data. At this point, it is easier to calculate the loop if the format of the map data is set in advance to the format of the measurement data.
- step S405 the matching unit 110 finds one piece of data similar to the measurement data described above from the range defined by the map data described above, and specifies the corresponding position (matching process). The details of the matching process will be described later with reference to FIG.
- step S406 the matching unit 110 notifies the estimated position determination unit 111 of the position identified in step S405.
- step S407 the matching unit 110 determines whether the position identified in step S405 has reached the end of the section determined in step S401. If the matching unit 110 determines that the time has not reached, the process returns to step S403 to continuously estimate the position. The matching unit 110 ends the process determined to have reached. Thus, steps S403 to S407 form a loop.
- the calculation cycle is assumed to be, for example, about 100 ms as described above.
- step S405 details of step S405 will be described using the flowchart of FIG. Each process (steps S501 to S507) shown in FIG. 5 is executed by the matching unit 110. Each processing will be described below.
- step S501 the matching unit 110 selects one piece of map data to be used for comparison with the measurement data in the subsequent step S502.
- steps S501 to S505 form a loop.
- the intention is to cover map data within the matching range defined in step S403 described above.
- step S501 the matching unit 110 selects map data one after another from the start position of the matching range.
- step S502 the matching unit 110 compares the map data selected in step S501 with the measurement data to evaluate the similarity.
- the measure of similarity evaluation is not limited to this as long as it is suitable for the purpose.
- step S503 the matching unit 110 determines whether the evaluation value of the similarity obtained in step S502 satisfies a predetermined reference value (exceeds a threshold) (ie, in the case of the illustrated scale), the reference value To determine whether or not If the matching unit 110 determines that the condition is satisfied, the process proceeds to step S504. If the matching unit 110 determines that the condition is not satisfied, the process proceeds to step S505, skipping step S504.
- a predetermined reference value ie, in the case of the illustrated scale
- the intention of this determination process is to avoid adopting it as a candidate for the vehicle position no matter how similar the comparison is within the matching range if the similarity is below the reference value. For example, if the sensing unit 108 is broken or the ranging does not function normally due to bad weather etc., the measured data is not quite different from that of the originally expected map data, and as a result it is compared with the map data Even if the similarity that satisfies the criteria can not be obtained.
- the purpose of detecting the fact that the sensing unit 108 does not function properly that is, when the obtained estimated position can not be placed in confidence) by utilizing this is beyond the above-described intention.
- step S504 the matching unit 110 selects the one with the highest degree of similarity in step S502 among the matching areas currently set, selecting map data one after another in step S501, and specifies the position. At this time, as described in the description of step S 503, those whose similarity is lower than the reference value are not subjected to this process. That is, if the similarity of all map data in the matching range falls below the reference value, the position is not specified in step S504, and if at least one exceeds the reference value, the similarity is the maximum in step S504. Identify the location of These two are distinguished in step S504 for use in later step S506.
- step S505 the matching unit 110 determines whether the map data selected in step S501 has reached from the beginning to the end of the matching range (that is, whether the map data in the matching range is covered). If the matching unit 110 determines that the end has not been reached, the process returns to step S501, and if it is determined that the end has been reached, the process proceeds to step S506.
- step S506 the matching unit 110 determines whether the position has been identified in step S504 described above. If the matching unit 110 determines that the position has been identified, the processing ends as the vehicle position candidate, and if it is determined that the position is not identified, the determination processing of step S 503 is performed to obtain all the map data. Since each similarity is below the reference value, an abnormality is determined, and the process proceeds to step S507.
- step S507 instead of specifying the position, the matching unit 110 performs processing so that information indicating the occurrence of an exception is passed to the subsequent processing (step S406 in FIG. 4).
- step S405 the matching unit 110 clarified that the information of the position specified as the candidate of the vehicle position or the information indicating the occurrence of the exception is used in step S406.
- step S406 the matching unit 110 notifies the estimated position determination unit 111 of any information. For example, when an exception occurs in step S405, the estimated position determination unit 111 can also know the occurrence of the exception.
- step S601 the estimated position determination unit 111 reads the position identified by the matching unit 110 as a reference position.
- the information from the matching unit 110 may not be information indicating the identified position but information indicating an occurrence of an exception. In this case, the previously read reference position is left as it is.
- step S602 the estimated position determination unit 111 determines whether the information from the matching unit 110 read in step S601 is information indicating the occurrence of an exception. If the estimated position determination unit 111 determines that the information indicates the occurrence of an exception, the process proceeds to step S603, and if it is determined that the information does not indicate the occurrence of an exception, the process proceeds to step S604.
- step S603 the estimated position determination unit 111 reads the travel distance from the travel distance measurement unit 112, determines the travel distance since the previous reference position was set, and adds it to the reference position to determine the estimated position. End the process. Since the exception occurs when the similarity between the measurement data and the map data does not satisfy a certain criterion, this process, that is, when the reliability of the position specified by the matching unit 110 is not sufficient, This means that the position information is not reflected on the estimated position of the vehicle 101, and instead, based on the reliable position obtained last time, the information on the travel distance is used to supplement the estimation of the vehicle position.
- step S604 the estimated position determination unit 111 outputs the reference position determined in step S601 if no exception occurs, and outputs the estimated position determined in step S603 to the control unit 113 when the exception occurs. finish.
- the position of the vehicle 101 traveling on the track 102 is identified by using the three-dimensional shape of the power path equipment (overhead wire) developed above the vehicle 101. Can be estimated with high accuracy.
- estimation of the vehicle position is performed using information of travel distance measured by another means. By supplementing, the reliability of the estimated position can be maintained, and the control function of the vehicle 101 using the estimated position can be continued.
- FIG. 7 is a diagram showing an example of the configuration of a vehicle control system 700 according to the present embodiment. Compared with the configuration described in FIG. 1 in the first embodiment, the difference is that the designated position information 701 is added and that the estimated position determination unit 702 is changed accordingly, and the other description is given in FIG. It is the same as the configuration. The following mainly describes different configurations.
- the designated position information 701 is data in which a section in which the estimation of the vehicle position using the sensing unit 108 can be performed particularly reliably is recorded in advance.
- a section is, for example, a section that can catch the support 106 of the overhead wire.
- the support 106 is necessarily made of a strong material such as an iron column and relatively large among the components of the wire from its application. The reason is that the possibility of not being detected by the sensing unit 108 is relatively low. In addition, it may be a section passing under the elevated road, etc. It can be expected that the possibility of not being detected by the sensing unit 108 becomes relatively low even in such a section.
- the data format of the designated position information 701 will be described with reference to FIG.
- the designated position information 701 includes a designated position ID and a section of the designated position. As will be understood through the following description, it is only at this designated position that the position identified from the three-dimensional shape of the overhead line is reflected on the estimated position of the vehicle 101.
- the designated position ID is “A”, “B”, “C”, etc. in combination with the notation pointing to the support 106 in FIG. 7, but the designation position ID is not limited to this notation, and the designated position can be identified. Other notations may be used.
- the section at the designated position is set to point 10 m near the support 106.
- the sensing unit 108 can sense the support 106 from 5 m before and after the position of the support 106, and the range is a section of the designated position, but is not limited to this.
- the designated position may be represented by one point on the trajectory, and the estimated position determination unit 702 may determine the section based on that point.
- step S901 is added between step S601 and step S602. It is similar.
- step S901 the estimated position determination unit 702 refers to the designated position information 701 and determines whether the position identified in step S405 is a designated position (whether or not it is within the section of the designated position). . If the estimated position determination unit 702 determines that it is a designated position, it moves the process to step S602, and if it determines that it is not a designated position, it moves the process to step S603, and thereafter, it is similar to the process described in FIG. Flow.
- the estimated position determination unit 111 sets the position identified in step S405 as the reference position only at the designated position by the same processing as that described with reference to FIG. 6 in the first embodiment. If there is no position, the vehicle position will be estimated based on the travel distance. In other words, apparently, the vehicle position is usually continuously estimated based on the travel distance, and the position is identified from the three-dimensional shape of the overhead wire with high accuracy and high reliability at the designated position that appears from time to time. It can be said that this is a mechanism for correcting accumulated errors.
- identification is performed using the three-dimensional shape of the power path equipment (overhead wire) developed above the vehicle 101,
- the position of the vehicle 101 traveling on the track 102 can be estimated with high accuracy.
- by narrowing the estimation of the vehicle position using the three-dimensional shape of the overhead wire to a section where it can be performed with relatively high accuracy and high reliability because of the characteristics of the three-dimensional shape the chance of mistaking the estimated position by misidentification is reduced. Can provide more reliable location information.
- the exception generated in step S405 can be latched (held) across the section, and correction can not be performed at the designated position if the exception occurs at a position other than the designated position.
- This is equivalent to performing processing of identifying the position from the three-dimensional shape of the overhead wire in the application of function diagnosis although it does not reflect the estimated position of the vehicle 101 at a position that is not a designated position.
- the occurrence of the exception is assumed to be a countermeasure against the case where a sufficiently accurate three-dimensional shape of the overhead wire can not be obtained due to an abnormality of the sensing unit 108 (ranging sensor), bad weather, etc. There is a great risk of failing to provide accurate position information even at the designated position. Therefore, more reliable location information in the sense that diagnosing the function at a position other than the designated position and stopping the function early when an abnormality is detected reduces the possibility of providing erroneous location information. Will provide.
- the present invention is applied to the vehicle control system 100, 700.
- the present invention is not limited to this.
- the present invention can be widely applied to various other vehicle control systems.
- the present invention is not limited thereto, for example, the vehicle 101 travels It is also possible to scan and match an overhead wire provided along another trajectory (for example, the trajectory 102 is an upward line, another trajectory is a downstream line) provided in parallel with the trajectory 102.
- the matching unit 110 is a data group indicating the three-dimensional shape of a structure provided in advance near the track 102 on which the vehicle 101 travels, and the three-dimensional shape of the object measured by the sensing unit 108. Processing of matching with a data group indicating.
- a data group indicating the three-dimensional shape of a structure provided in advance near the track 102 on which the vehicle 101 travels is associated with position information indicating the position of the structure. It is an example of a plurality of structure information.
- the track 102 is an upward line and the other track is a downward line. It is also possible to scan and match both of the overhead lines to be processed. When both overhead lines are to be subjected to the matching process, more matching processes can be performed than in the case of one overhead line, so that the estimated position of the vehicle 101 can be determined with higher accuracy.
Abstract
車両に設けられ、物体の3次元形状を測定するセンシング部と、車両が走行する軌道付近に予め設けられている構造物の3次元形状を示すデータ群と構造物の位置を示す位置情報とが対応付けられている複数の構造物情報と、センシング部で測定された物体の3次元形状を示すデータ群とのマッチング処理を行い、物体の位置を特定するマッチング部と、マッチング部で特定された位置を基準位置とし、基準位置に基づいて車両の推定位置を決定する推定位置決定部と、を設けるようにした。
Description
本発明は車両制御システムに関し、例えば車両の位置を推定する車両制御システムに適用して好適なものである。
鉄道車両を時刻通りに運行したり、車両同士の安全距離を保つように制御したりするためには、車両の位置情報が不可欠である。
現在、鉄道車両の位置を推定する手段として、基準地点からの走行距離を、車輪の回転数と車輪径との積により算出する手段(オドメトリ)が広く利用されている。しかしながら、この手段は、車輪の空転滑走、磨耗の影響等により、走行距離に比例して推定位置の誤差が累積するのを避けられない。
そこで、累積した誤差をリセットする位置補正手段として、それ自身の位置情報を予め記憶した地上子を軌間に設置し、車両がその上を通過するときにその位置情報を読み出す手段が、前述のオドメトリと合わせて広く利用されている。この手段は、推定位置の補正に効果的であるが、補正後に再び推定位置の誤差が累積するのを避けられない。このため、推定位置の誤差を車両の運行制御に必要な範囲で抑え続けるには、地上子をある程度(例えば数百m)の間隔で連続して敷設する必要があり、その分インフラ工事、保全のコストなどを必要とする。
この点、車両に給電するためのトロリ線の形状と絶対位置との関係を予めデータベースに格納しておき、走行中に取得したトロリ線の形状をデータベースの内容と比較することで、車両の絶対位置を特定する方法が開示されている(特許文献1参照)。ここで、走行中にトロリ線の形状を取得する方法として、パンタグラフに備えた角度センサを挙げている。
また、架線を測距センサで計測して得た時系列データを、予め計測して記憶したその時系列データと連続的にマッチングさせることで、車両の自己位置を推定する方法が開示されている(特許文献2参照)。ここで、位置と関連付けられる架線の特徴量として、架線の磨耗、偏位、高さを挙げている。
また、枕木、架線の継ぎ目、碍子など軌道沿線の構造物(地物)を予めデータベース化し、非接触式センサでそれらを検出し、数や間隔などを参考に現在位置を特定する方法が開示されている(特許文献3参照)。
これらの方法によれば、電気鉄道において、車両に駆動エネルギーを与えるために元々ある架線を利用することで、地上子もその代替となる地上設備も新たに設置することなく、その分だけ安価に車両位置を推定できる。
しかしながら、特許文献1に記載の方法および特許文献2に記載の方法は、位置に応じた架線(トロリ線)の特徴のわずかな変化に頼ったものであるため、この方法により高精度かつ高信頼な位置推定を実現するには、高精度なセンサと、パンタグラフの離線および架線の磨耗への対処を必要とする。
また、特許文献3に記載の方法は、高速に走行する車両から検出するには小さい枕木、碍子などを目印に、その数や間隔に頼るため、高精度かつ高信頼な位置推定を実現するには、外界情報を緻密に検出できるセンサ(例えばスキャン周波数の高いセンサ)およびそれに応じた高速処理と、目印を読み飛ばした場合への対処を必要とする。
本発明は以上の点を考慮してなされたもので、地上子もその代替となる地上設備も新たに設置することなく、かつ、高精度なセンサを用いることなく、車両の位置を高精度に推定可能な車両制御システムを提案しようとするものである。
かかる課題を解決するため本発明においては、車両に設けられ、物体の3次元形状を測定するセンシング部と、前記車両が走行する軌道付近に予め設けられている構造物の3次元形状を示すデータ群と前記構造物の位置を示す位置情報とが対応付けられている複数の構造物情報と、前記センシング部で測定された物体の3次元形状を示すデータ群とのマッチング処理を行い、前記物体の位置を特定するマッチング部と、前記マッチング部で特定された位置を基準位置とし、前記基準位置に基づいて前記車両の推定位置を決定する推定位置決定部と、を設けるようにした。
上記構成では、3次元形状を示すデータ群を用いてマッチング処理を行うので、車両の位置を高精度に推定できる。
本発明によれば、信頼性の高い車両制御システムを実現することができる。
以下図面について、本発明の一実施の形態を詳述する。
(1)第1の実施の形態
図1において、100は全体として第1の実施の形態による車両制御システムを示す。かかる車両制御システム100は、車両101を含んで構成される。車両101は、軌道102に沿って設けられている電路設備より給電され、軌道102を走行する。
図1において、100は全体として第1の実施の形態による車両制御システムを示す。かかる車両制御システム100は、車両101を含んで構成される。車両101は、軌道102に沿って設けられている電路設備より給電され、軌道102を走行する。
電路設備の代表的な構成要素としては、車両101とパンタグラフで接するトロリ線103と、トロリ線103を吊り支えるちょう架線104およびハンガ105と、これらを支持する支持具106および絶縁具107とがある。電路設備は、これらに加えて、張力調整具、き電分岐装置、絶縁用の碍子など、様々な要素で構成されていることが普通である。以下、特に断らない限り、車両101の上方で電路設備を構成するこれらの構成要素を纏めて「架線」と称する。
車両101は、センシング部108、地図情報109、マッチング部110、推定位置決定部111、走行距離計測部112、および制御部113を備える。
センシング部108は、LIDAR(Light Detection and Ranging)で架線をスキャンし、架線の3次元形状を計測し、その3次元形状のデータ(計測データ)をマッチング部110に伝送する。ここで、LIDARとは、対象にレーザを照射し、その反射を受光することで対象までの距離を測定する装置である。その原理から、測距の精度は、数mm~数cmと比較的高い。1本の直進するレーザを基本単位とし、数十Hzと高速で照射の方向を次々と周期的に変化させることで、対象の表面形状を細密な点の集まり(点群)として捉えられる。このため、前述の計測データは、架線の3次元形状を点群として表現したデータ(データ群)である。
なお、センシング部108のLIDARには、照射の方向を立体的に変化させられる3次元LIDARを想定する。LIDARには、これ以外にも照射の方向を平面的に変化させる2次元LIDARがあり、これを単独で、または複数組み合わせて用いたとしても、同様に対象の表面形状を(3次元LIDARを利用する場合よりも一度に取得できる情報量は少ないものの)捉えることができるので、以下で記す内容を同様に実施できる。
ここで、車両101を断面方向から見た様子を示す図2を用いて、車両101、センシング部108、および架線(トロリ線103、ちょう架線104、ハンガ105、支持具106、絶縁具107)の位置関係を詳しく説明する。
センシング部108において、LIDARは、パンタグラフとトロリ線103の接点を中心とすると斜め方向から架線をスキャンできるように車両101に設置されている。これは、架線の特徴点の情報を多く捉えられた方がこの後の処理(図5で説明するマッチング処理)に有利であるという考えであり、架線の構成要素をできるだけ多く捉えられるようにするためである。例えば、トロリ線103の直下の位置からスキャンをすると、原則鉛直方向にトロリ線103を吊っているハンガ105およびちょう架線104が、トロリ線103の背後に隠れる形で、スキャンが及ばなくなる。これに対し、トロリ線103の直下よりもずれた位置にセンシング部108を設け、当該位置から斜めにスキャンをすれば、周期的に張られたハンガ105、および周期的にたわみを見せるちょう架線104の側面にスキャンが及び、それらの特徴を計測データの中に取り込むことができる。
ここで、支持具106の形状について説明を補足する。支持具106は、ちょう架線104およびトロリ線103を含む、その下方にある構造物全てを支持する必要から、通常、鉄骨などの強靭な材質で成り、大きさも架線の構造物の中でひときわ大きい。このため、LIDARでその3次元形状を比較的捉え易い。電線のようにたわんだり揺れたりする心配も無いため、車両101の走行の都度、毎回同じように、また比較的見落とす心配も少なく、LIDARによるスキャンで捉えることができると言える。支持具106は、数百mの間隔で建てられているのが普通である。
以上で図2を用いた説明を終え、再び図1を用いて、車両101が備える残りの構成について説明する。
地図情報109は、軌道102に亘る架線の3次元形状を、その位置情報と対応付けて予め記憶したデータベースである。このようなデータベースを作成するには、センシング部108と同様または更に高精細なLIDARを備えた車両を軌道に沿って事前に走らせ、その計測データを(必要に応じて加工し)保存すればよい。計測して得られた3次元形状と位置との対応付けは、例えばDGPS(Differential Global Positioning System)などの高々数十cm程度の誤差で絶対位置を計測できる手法を組み合わせることで実現できる。この手段によるものと同等の結果が得られさえすれば、データベースを作成する方法はこれに限らない。
地図情報109は、軌道102に亘っての3次元形状の情報であるから、データのサイズが比較的大きい。そのデータを記憶する方法は特に問わないが、本実施の形態では、2次記憶装置(磁気ディスク、光学ディスク、フラッシュメモリ記憶装置などであり、図示は省略する。)に記憶されているものとする。後に説明するマッチング部110の処理で、地図情報109は、必要な区間の分だけ主記憶装置(図示は省略する。)上に読み出されて利用される。
ここで、図3を用い、地図情報109が記憶する3次元形状のデータフォーマットを説明する。3次元形状のデータは、3次元空間の座標系を表すX,Y,Zおよび各点での値Pで構成される。X,Y,Zは、架線の構成要素の3次元形状を点群として表現するのに十分なきめ細かさ(例えば数cm)で3次元空間を格子に区切った各点の座標である。値Pは、点の有無を表す2値で、便宜上「1」のときに点が有ることを表し、「0」のときに点が無いことを表すものとする。X,Y,Zの組で表される各点について、値Pが「1」のときに点を描画していけば、3次元形状を点群で表現できる仕組みである。
なお、X,Y,Zの各軸は、必ずしも互いに90度で直行する必要はなく、3次元空間を表現できるように、互いに一次独立であればよい。例えば、Xを軌道102に沿う方向にとり、Yを軌道を横切る方向に、Zを高さ方向にとれば、Xの値がそのまま軌道102上の位置に対応付くので、いま処理の対象としている軌道102沿線の3次元空間を記述するのに便利である。
以上で図3の説明を終え、再び図1の説明に戻る。
マッチング部110は、地図情報109から読み出した予め記憶した架線の3次元形状のデータ(地図データ)の中から、センシング部108から受信した架線の3次元形状の計測データに最もよく一致するものを1つ特定し、それに対応する位置を特定する手段である。特定した位置は、推定位置決定部111に出力される。後に図4および図5を用いて具体的な処理の内容を説明する。
推定位置決定部111は、マッチング部110が特定した位置と、次に説明する走行距離計測部112求めた車両101の走行距離とから、車両101の位置を推定(推定位置を決定)する手段である。後に図6を用いて具体的な処理の内容を説明する。決定された推定位置は、制御部113に送信される。
走行距離計測部112は、車両101の走行距離を計測し、推定位置決定部111に送信する。走行距離を計測する手段は、特に問わない。車輪の回転数を計数し、それに予め記憶した車輪径を掛けることで走行距離を算出する手段が、背景技術に記載した通り鉄道車両でよく用いられており、例えばその手段を想定する。他に、速度センサの出力を積分して走行距離を算出する方法もある。
制御部113は、車両101の推定位置を用いた車両制御のアプリケーションである。車両101が決められた地点間(例えば、駅間)を予定された時刻(ダイヤ)通りに走行するように加減速を自動制御する自動運転システム(ATO:Automatic Train Operation)が、例えばそれに当たる。位置毎に決められた制限速度に従って車両101を自動で加減速するには、少なくとも数m単位で車両101の位置を把握するのが望ましく、また駅のホームのように停止位置の決められた所へ車両101を自動で停止させる定位置停止制御(TASC:Train Automatic Stopping-position Control)では、少なくとも数cmの精度で車両101の位置を把握する必要がある。数mm~数cmの測距精度を持つLIDARを用いてセンシング部108を実装し、また地図情報109を作成したとき、マッチング部110で情報量を落とさない限り、推定位置決定部111で求めた推定位置は、これらの機能を持つATOの用途に堪えると期待できる。またATOの他に、車両同士の安全距離を確保するようにブレーキを制御する信号システム(ATP:Automatic Train Protection)も、車両101の推定位置を用いるアプリケーションの一例である。
なお、車両101の機能(センシング部108、マッチング部110、推定位置決定部111、走行距離計測部112、および制御部113)の一部または全部は、図示は省略するCPU(Central Processing Unit)が主記憶装置にプログラムを読み出して実行すること(ソフトウェア)により実現されてもよいし、専用の回路などのハードウェアにより実現されてもよいし、ソフトウェアとハードウェアとが組み合わされて実現されてもよい。また、車両101の機能の一部または全部は、車両101と通信可能なコンピュータにより実現されてもよい。
以上で図1の説明を終え、続いてマッチング部110の処理について図4および図5を用いて説明する。
図4に示す各処理(ステップS401~ステップS406)は、マッチング部110により実行される。以下、各処理について説明する。
ステップS401では、マッチング部110は、以降の処理を適用する軌道102上の区間を定める。区間を定める理由は、続くステップS402で、地図情報109からその区間の分だけ架線の3次元形状の地図(地図データ)を主記憶装置上に読み込むためである。このため、区間をどう選ぶかは地図データのサイズと主記憶装置の容量との兼ね合いによるが、実用上、例えば駅間を1つの区間に定め、駅での停車中に次の駅間の地図データを読み込むようにすれば、走行中に新たに地図データを読み込む必要がなく好適である。
ステップS402では、前述したように、マッチング部110は、地図情報109からステップS401で定めた区間の分だけ地図データを主記憶装置上に読み込む。
ステップS403では、マッチング部110は、主記憶装置上に読み込んだ地図データのうちどの範囲を、次のステップS404でセンシング部108から読み込んだ計測データと比較するかを決定する(マッチング範囲の設定)。この比較の詳細についてはステップS405のところで説明するが、比較の目的は、車両101の位置(車両位置)の候補を特定することである。このため、車両101が走行する軌道102が決まっており、車両101が前回に観測した位置から急激には移動しない以上、合理的な範囲で、いま車両101が位置していると予測する軌道102上の所定の範囲を特定できる。
本処理は、計測データとの比較に使う地図データをこの合理的な範囲に予め絞り、後のステップS405で計算量を低減する意図で設けられている。範囲の定め方は、例えば、後で説明するように車両位置の候補を特定するステップS406を経てステップS407からステップS403に戻るループがあることから、ステップS406で一度特定した車両位置を基準に、そこからループの周期(例えば100ms)のうちに車両101が走行し得る距離を加味した分で定めることができる。この例に従うと、基準の車両位置をx0として、車両101が約72km/hで走行していれば、100msの間に走行するのは約2mであるから、範囲を[x0,x0+2m]と定められる。実用上は、位置、車両速度の誤差等を考慮したマージンαを持たせ、[x0-α,x0+2m+α]と範囲を定めるのがよい。なお、ステップS403の初回実行時は、まだステップS406で特定した位置の候補の情報が無いため、始点駅の位置など何らかの初期位置情報を基準に範囲を定めればよい。
ステップS404では、マッチング部110は、センシング部108から、LIDARで計測した架線の計測データを受信し、主記憶装置に読み込む。このとき、後のステップS405の中で、計測データを先のステップS402で読み込んだ地図データと比較するので、2つのデータの形式を比較可能なように揃える変換処理も同時に行う。なお、ステップS404は、ステップS403~ステップS407のループの中で何度も計算するため、地図データの形式に合わせて計測データの形式を変換するよりは、先のステップS402で地図データを読み込んだ時点で、地図データの形式の方を計測データの形式に予め合わせておいた方が、ループの計算が容易になる。
ステップS405では、マッチング部110は、先述の地図データで定めた範囲の中から、先述の計測データと類似するデータを1つ見付け、それに対応する位置を特定する(マッチング処理)。このマッチング処理の詳細については後に図5を用いて説明する。
ステップS406では、マッチング部110は、ステップS405で特定した位置を推定位置決定部111に通知する。
ステップS407では、マッチング部110は、ステップS405で特定した位置が、ステップS401で定めた区間の終端に達しているか否かを判定する。マッチング部110は、達していないと判定した場合、位置を続けて推定するために、ステップS403に処理を戻す。マッチング部110は、達していると判定した処理を終了する。これによりステップS403~ステップS407は、ループを形成する。その計算周期は、前述した通り、例えば100ms程度の想定である。
次にステップS405の詳細を図5のフローチャートを用いて説明する。図5に示す各処理(ステップS501~ステップS507)は、マッチング部110により実行される。以下、各処理について説明する。
ステップS501では、マッチング部110は、続くステップS502で計測データとの比較に使う地図データを1つ選択する。後述するように、ステップS501からステップS505は、ループを形成している。その意図は、先述したステップS403で定めたマッチング範囲内の地図データを網羅するためである。このために、ステップS501では、マッチング部110は、マッチング範囲の始点位置から次々と地図データを選択していく。
ステップS502では、マッチング部110は、ステップS501で選択した地図データと計測データとを比較し、類似度を評価する。類似度の尺度については様々考えられるが、例えば図3で示したデータ形式で表現するならば、3次元空間内の同じ格子(X,Y,Zの組)にデータが有る(P=1)かデータが無い(P=0)か、仮に相違するときは隣接する格子(X+1,Y,Zなど)とはどうかを調べ、同じセルにあれば2点、隣接するセルにあれば1点などと重み付きの得点を与え、その総合得点で類似度を測る尺度が考えられる。この場合、得点が高いほど類似度が高い。類似度の評価の尺度は、目的に適うものであれば、これに限らない。
ステップS503では、マッチング部110は、ステップS502で求めた類似度の評価値が、予め定めた基準値を満足する(しきい値を超える)か否か(つまり例示した尺度の場合なら基準値よりも大きいか否か)を判定する。マッチング部110は、満足していると判定した場合、ステップS504に処理を移し、満足していないと判定した場合、ステップS504をスキップしてステップS505に処理を移す。
この判定処理の意図は、類似度が基準値以下の場合、いかにマッチング範囲内で相対的に類似度が高かろうと、車両位置の候補には採用しないようにするためである。例えば、センシング部108が故障していたり、悪天候などの理由で測距が正常に機能しない場合、測定データは、本来期待された地図データのそれとは少なからず異なり、結果として地図データといくら比較しても基準を満足するような類似度は、おそらく得られない。これを利用して、センシング部108が正常に機能しない場合(つまり得られた推定位置に信頼の置けない場合)にそのことを検出するという目的が、前述の意図の先にある。
ステップS504では、マッチング部110は、目下設定されているマッチング範囲において、ステップS501で次々と地図データを選択してきた中で、ステップS502における類似度が最も高いものを選び、その位置を特定する。このとき、ステップS503の説明で記述した通り、類似度が基準値を下回るものはこの処理の対象にならない。すなわち、仮にマッチング範囲内の全ての地図データの類似度が基準値を下回る場合は、ステップS504では位置を特定せず、1つでも基準値を上回れば、ステップS504ではその中で類似度が最大の位置を特定する。後のステップS506で利用するため、ステップS504ではこれら2つが区別されている。
ステップS505では、マッチング部110は、ステップS501で選択した地図データがマッチング範囲の始端から終端へと達するに至ったか否か(つまり、マッチング範囲の地図データが網羅されたか否か)を判定する。マッチング部110は、終端に達しないと判定した場合、ステップS501に処理を戻し、終端に達したと判定した場合、ステップS506に処理を移す。
ステップS506では、マッチング部110は、前述のステップS504において、位置を特定したか否かを判定する。マッチング部110は、位置を特定したと判定した場合、その位置を車両位置の候補として処理を終了し、位置を特定していないと判定した場合、ステップS503の判定処理を経て全ての地図データの各類似度が基準値を下回っていたということなので異常を判断し、ステップS507に処理を移す。
ステップS507では、マッチング部110は、位置を特定する代わりに例外の発生を示す情報が後段の処理(図4のステップS406)に渡されるように処理する。
以上で図5の説明を終え、図4の説明に戻る。
先の説明によって、ステップS405では、マッチング部110は、車両位置の候補として特定した位置の情報または例外の発生を示す情報をステップS406に用いることを明らかにした。ステップS406では、マッチング部110は、何れかの情報を推定位置決定部111に通知する。例えば、ステップS405で例外の発生があった場合、推定位置決定部111もまた、その例外の発生を知ることができる。
以上で図4の説明を終え、続いて推定位置決定部111の処理について図6を用いて説明する。図6に示す各処理(ステップS601~ステップS604)は、推定位置決定部111により実行される。以下、各処理について説明する。
ステップS601では、推定位置決定部111は、マッチング部110で特定された位置を基準位置として読み込む。前述の通り、マッチング部110からの情報は、特定した位置を示す情報ではなく、例外の発生を示す情報である場合がある。この場合は、前に読み込んだ基準位置をそのままにする。
ステップS602では、推定位置決定部111は、ステップS601で読み込んだマッチング部110からの情報が、例外の発生を示す情報であるか否かを判定する。推定位置決定部111は、例外の発生を示す情報であると判定した場合、ステップS603に処理を移し、例外の発生を示す情報でないと判定した場合、ステップS604に処理を移す。
ステップS603は、推定位置決定部111は、走行距離計測部112から走行距離を読み込み、前回の基準位置を設定して以来の走行距離を、その基準位置に加算したものを推定位置に決定した上で、処理を終了する。例外が発生するのは計測データと地図データとの類似度がある基準を満足しない場合であったから、この処理は、すなわち、マッチング部110で特定された位置の信頼性が十分でない場合は、その位置情報を車両101の推定位置には反映させず、代わりに前回得られた信頼できる位置を基準に、そこから走行距離の情報を使って車両位置の推定を補ったということである。
ステップS604では、推定位置決定部111は、例外が発生しなかった場合、ステップS601で決定した基準位置、例外が発生した場合、ステップS603で決定した推定位置を制御部113に出力し、処理を終了する。
以上のように、第1の実施の形態によると、車両101上方に展開された給電用の電路設備(架線)の3次元形状を用いて同定することで、軌道102を走行する車両101の位置を高精度に推定できる。また、センシング部108(測距センサ)の故障、悪天候などの要因で架線の3次元形状を十分正確に捉えられないとき、別の手段で計測した走行距離の情報を使って車両位置の推定を補うことで、推定位置の信頼性を保ち、推定位置を用いた車両101の制御機能を継続できる。
(2)第2の実施の形態
以下、図7~図9を用いて第2の実施の形態について説明する。
以下、図7~図9を用いて第2の実施の形態について説明する。
図7は、本実施の形態の車両制御システム700の構成の一例を示す図である。第1の実施の形態において図1で説明した構成に比べ、指定位置情報701が追加されたことと、それに伴って推定位置決定部702が変更されたことが異なり、それ以外は図1で説明した構成と同じである。以下では、異なる構成について主に説明する。
指定位置情報701は、センシング部108を用いた車両位置の推定を特に高信頼に行える区間を予め記録したデータである。このような区間として想定されるのは、例えば、架線の支持具106を捉えることのできる区間である。これは、第1の実施の形態で説明したように、支持具106がその用途から必然的に、鉄柱などの強靭な材質で、かつ架線の構成要素の中で比較的巨大に作られており、センシング部108で検出されない可能性が相対的に低いためである。他にも、高架の下を通過する区間などであってもよく、このような区間であっても、センシング部108で検出されない可能性が相対的に低くなることが期待できる。
指定位置情報701のデータ形式を、図8を用いて説明する。指定位置情報701は、指定位置IDと、その指定位置の区間とで構成される。後の説明を通じて分かるように、架線の3次元形状から同定した位置が車両101の推定位置に反映されるのは、この指定位置でのみとなる。
ここで、指定位置IDは、図7中の支持具106を指す表記と合わせて「A」、「B」、「C」などとしたが、この表記に限るものではなく、指定位置を識別可能な他の表記を用いてもよい。また、この例では、指定位置の区間は、支持具106の付近10mを指すようにした。センシング部108は、支持具106の位置の前後5mから支持具106をセンシング可能であり、その範囲を指定位置の区間としているが、これに限られるものではない。例えば、指定位置を軌道上の1点で表し、推定位置決定部702で、その点を基準に区間を定めるようにしてもよい。
推定位置決定部702の処理について図9を用いて説明する。推定位置決定部702の処理は、第1の実施の形態において図6を用いて説明した推定位置決定部111の処理と比べ、ステップS601とステップS602との間にステップS901が追加された以外は同様である。
ステップS901では、推定位置決定部702は、指定位置情報701を参照し、ステップS405で特定された位置が、指定位置であるか否か(指定位置の区間内にあるか否か)を判定する。推定位置決定部702は、指定位置であると判定した場合、ステップS602に処理を移し、指定位置でないと判定した場合、ステップS603に処理を移すので、以降は、図6で説明した処理と同様の流れになる。
つまり、推定位置決定部111は、第1の実施の形態で図6を用いて説明したのと同じ処理により、指定位置においてのみ、ステップS405で特定した位置を基準位置に設定し、指定位置ではない位置には、走行距離に基づいて車両位置を推定することになる。これは言い換えると、見かけ上、普段は走行距離に基づいて車両位置を連続的に推定し、時々現れる指定位置で架線の3次元形状から高精度かつ高信頼に位置を同定して、走行距離に累積する誤差を補正する仕組みであるとも言える。
以上のように、第2の実施の形態によると、第1の実施の形態と同様、車両101上方に展開された給電用の電路設備(架線)の3次元形状を用いて同定することで、軌道102を走行する車両101の位置を高精度に推定できる。加えて、架線の3次元形状を用いた車両位置の推定を、3次元形状の特徴上、それを比較的高精度かつ高信頼に行える区間に絞ることで誤同定により推定位置を誤る機会を減らし、より高信頼な位置情報を提供できる。
なお、ステップS405の中で発生した例外を区間に亘ってラッチ(保持)するようにし、指定位置ではない位置で例外が発生した場合、指定位置でも補正が行われないようにすることができる。これは、指定位置ではない位置で、車両101の推定位置には反映しないものの、機能診断の用途で架線の3次元形状から位置を同定する処理を行うことに等しい。例外の発生は、センシング部108(測距センサ)の異常、悪天候などで十分に精確な架線の3次元形状を得られない場合への対処を想定したものであったので、そのような場合、指定位置でも正確な位置情報を提供し損なうおそれが大きい。したがって、指定位置ではない位置で機能を診断し、異常を検出した場合に早めに機能を停止することは、誤った位置情報を提供する可能性を減少させるという意味で、より高信頼な位置情報を提供することになる。
上述した構成によれば、信頼性の高い車両制御システムを実現することができる。
(3)他の実施の形態
なお上述の第1および第2の実施の形態においては、本発明を車両制御システム100,700に適用するようにした場合について述べたが、本発明はこれに限らず、この他種々の車両制御システムに広く適用することができる。
なお上述の第1および第2の実施の形態においては、本発明を車両制御システム100,700に適用するようにした場合について述べたが、本発明はこれに限らず、この他種々の車両制御システムに広く適用することができる。
また上述の実施の形態においては、車両101が走行する軌道102に沿って設けられる架線をスキャンしてマッチング処理する場合について述べたが、本発明はこれに限らず、例えば、車両101が走行する軌道102と並行して設けられる他の軌道(例えば、軌道102が上り線、他の軌道が下り線。)に沿って設けられる架線をスキャンしてマッチング処理するようにしてもよい。この場合、マッチング部110は、広義には、車両101が走行する軌道102付近に予め設けられている構造物の3次元形状を示すデータ群と、センシング部108で測定された物体の3次元形状を示すデータ群とのマッチング処理を行うものである。付言するならば、地図情報109は、車両101が走行する軌道102付近に予め設けられている構造物の3次元形状を示すデータ群と構造物の位置を示す位置情報とが対応付けられている複数の構造物情報の一例である。
また、例えば、車両101が走行する軌道102に沿って設けられる架線と軌道102と並行して設けられる他の軌道(例えば、軌道102が上り線、他の軌道が下り線。)に沿って設けられる架線との両方をスキャンしてマッチング処理するようにしてもよい。両方の架線をマッチング処理の対象とする場合、一方の架線の場合よりも多くのマッチング処理を行うことができるので、より高精度に車両101の推定位置を決定することができるようになる。
上述した構成については、発明の要旨を超えない範囲において、適宜に、変更したり、組み合わせたり、省略したりすることができる。
100……車両制御システム、101……車両、102……軌道、103……トロリ線、104……ちょう架線、105……ハンガ、106……支持具、107……絶縁具、108……センシング部、109……地図情報、110……マッチング部、111……推定位置決定部、112……走行距離計測部、113……制御部。
Claims (9)
- 車両に設けられ、物体の3次元形状を測定するセンシング部と、
前記車両が走行する軌道付近に予め設けられている構造物の3次元形状を示すデータ群と前記構造物の位置を示す位置情報とが対応付けられている複数の構造物情報と、前記センシング部で測定された物体の3次元形状を示すデータ群とのマッチング処理を行い、前記物体の位置を特定するマッチング部と、
前記マッチング部で特定された位置を基準位置とし、前記基準位置に基づいて前記車両の推定位置を決定する推定位置決定部と、
を備えることを特徴とする車両制御システム。 - 前記基準位置からの前記車両の走行距離を計測する走行距離計測部を備え、
前記推定位置決定部は、前記走行距離計測部で計測された走行距離を前記基準位置に加算したものを前記車両の推定位置として決定する、
ことを特徴とする請求項1に記載の車両制御システム。 - 前記マッチング部は、前記軌道上の所定の範囲における構造物の3次元形状を示すデータ群の各々と前記センシング部で測定された物体の3次元形状を示すデータ群との類似度を算出し、各類似度がしきい値を超えるか否かを判定し、
前記推定位置決定部は、前記マッチング部で前記しきい値を超える類似度がないと判定された場合、前記走行距離計測部で計測された走行距離を前記基準位置に加算したものを前記車両の推定位置として決定する、
ことを特徴とする請求項2に記載の車両制御システム。 - 前記マッチング部は、前記所定の範囲の次にマッチング処理の対象とする範囲として、前記車両の推定位置と前記車両の速度とに基づいて、前記車両が位置していると予測する前記軌道上の範囲を設定する、
ことを特徴する請求項3に記載の車両制御システム。 - 前記予め設けられている構造物は、前記軌道付近の電路設備を構成する構成要素である、
ことを特徴とする請求項1に記載の車両制御システム。 - 前記センシング部は、前記電路設備を構成する構成要素であるトロリ線の真下からずれた位置に設けられている、
ことを特徴とする請求項5に記載の車両制御システム。 - 前記推定位置決定部で決定された前記車両の推定位置を用いて前記車両の制御を行う制御部を備える、
ことを特徴とする請求項1に記載の車両制御システム。 - 前記予め設けられている構造物のうち予め指定された構造物の指定位置を示す指定位置情報が設けられ、
前記推定位置決定部は、前記マッチング部で特定された位置が前記指定位置であるか否かを判定し、前記指定位置であると判定した場合、前記指定位置を前記基準位置とし、前記基準位置を前記車両の推定位置として決定する、
ことを特徴とする請求項1に記載の車両制御システム。 - 前記予め指定された構造物は、前記軌道付近の電路設備を構成する支持具である、
ことを特徴とする請求項8に記載の車両制御システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/764,901 US11453422B2 (en) | 2017-11-21 | 2018-10-23 | Vehicle control system |
| EP18880395.1A EP3715211A4 (en) | 2017-11-21 | 2018-10-23 | VEHICLE CONTROL SYSTEM |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-223631 | 2017-11-21 | ||
| JP2017223631A JP6986936B2 (ja) | 2017-11-21 | 2017-11-21 | 車両制御システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019102769A1 true WO2019102769A1 (ja) | 2019-05-31 |
Family
ID=66631577
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/039320 WO2019102769A1 (ja) | 2017-11-21 | 2018-10-23 | 車両制御システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11453422B2 (ja) |
| EP (1) | EP3715211A4 (ja) |
| JP (1) | JP6986936B2 (ja) |
| WO (1) | WO2019102769A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6947699B2 (ja) * | 2018-07-25 | 2021-10-13 | 公益財団法人鉄道総合技術研究所 | 情報処理装置および点群位置補正方法、ならびにプログラム |
| JP7227879B2 (ja) * | 2019-09-02 | 2023-02-22 | 株式会社日立製作所 | 周辺観測システム、周辺観測プログラムおよび周辺観測方法 |
| CN112330647A (zh) * | 2020-11-12 | 2021-02-05 | 南京优视智能科技有限公司 | 一种动车车底异常检测方法 |
| ES2966194T3 (es) * | 2020-12-14 | 2024-04-18 | Siemens Rail Automation S A U | Sistema y método para medir la distancia recorrida por un vehículo guiado |
| JP2024000901A (ja) * | 2022-06-21 | 2024-01-09 | 株式会社日立製作所 | 速度算出装置、速度算出方法および移動体制御システム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09270013A (ja) * | 1996-04-02 | 1997-10-14 | Nippon Signal Co Ltd:The | 移動体位置検知装置 |
| JP2008247154A (ja) * | 2007-03-30 | 2008-10-16 | Kyosan Electric Mfg Co Ltd | 列車位置検知装置と列車制御装置 |
| JP2011201426A (ja) * | 2010-03-25 | 2011-10-13 | National Traffic Safety & Environment Laboratory | 列車搭載用画像処理システム |
| JP2013107434A (ja) | 2011-11-18 | 2013-06-06 | Nippon Signal Co Ltd:The | 車上装置、及び、自列車位置認識方法 |
| JP2014220858A (ja) | 2013-05-01 | 2014-11-20 | 株式会社日立製作所 | 位置検出装置及び位置検出方法 |
| JP2015093532A (ja) | 2013-11-11 | 2015-05-18 | 株式会社明電舎 | 電車の自己位置推定装置 |
| US20160221592A1 (en) * | 2013-11-27 | 2016-08-04 | Solfice Research, Inc. | Real Time Machine Vision and Point-Cloud Analysis For Remote Sensing and Vehicle Control |
| JP2017001638A (ja) * | 2015-06-16 | 2017-01-05 | 西日本旅客鉄道株式会社 | 画像処理を利用した列車位置検出システムならびに画像処理を利用した列車位置および環境変化検出システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AUPP299498A0 (en) * | 1998-04-15 | 1998-05-07 | Commonwealth Scientific And Industrial Research Organisation | Method of tracking and sensing position of objects |
| KR101583707B1 (ko) * | 2013-11-12 | 2016-01-08 | 한국철도기술연구원 | 전차선 편위 정보를 이용한 고정밀 열차 위치 검지 시스템 |
| JP6389783B2 (ja) * | 2015-03-11 | 2018-09-12 | 公益財団法人鉄道総合技術研究所 | 渡り線相対位置管理装置及び方法 |
| US9711050B2 (en) * | 2015-06-05 | 2017-07-18 | Bao Tran | Smart vehicle |
| US11307042B2 (en) * | 2015-09-24 | 2022-04-19 | Allstate Insurance Company | Three-dimensional risk maps |
-
2017
- 2017-11-21 JP JP2017223631A patent/JP6986936B2/ja active Active
-
2018
- 2018-10-23 US US16/764,901 patent/US11453422B2/en active Active
- 2018-10-23 EP EP18880395.1A patent/EP3715211A4/en active Pending
- 2018-10-23 WO PCT/JP2018/039320 patent/WO2019102769A1/ja active Search and Examination
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09270013A (ja) * | 1996-04-02 | 1997-10-14 | Nippon Signal Co Ltd:The | 移動体位置検知装置 |
| JP2008247154A (ja) * | 2007-03-30 | 2008-10-16 | Kyosan Electric Mfg Co Ltd | 列車位置検知装置と列車制御装置 |
| JP2011201426A (ja) * | 2010-03-25 | 2011-10-13 | National Traffic Safety & Environment Laboratory | 列車搭載用画像処理システム |
| JP2013107434A (ja) | 2011-11-18 | 2013-06-06 | Nippon Signal Co Ltd:The | 車上装置、及び、自列車位置認識方法 |
| JP2014220858A (ja) | 2013-05-01 | 2014-11-20 | 株式会社日立製作所 | 位置検出装置及び位置検出方法 |
| JP2015093532A (ja) | 2013-11-11 | 2015-05-18 | 株式会社明電舎 | 電車の自己位置推定装置 |
| US20160221592A1 (en) * | 2013-11-27 | 2016-08-04 | Solfice Research, Inc. | Real Time Machine Vision and Point-Cloud Analysis For Remote Sensing and Vehicle Control |
| JP2017001638A (ja) * | 2015-06-16 | 2017-01-05 | 西日本旅客鉄道株式会社 | 画像処理を利用した列車位置検出システムならびに画像処理を利用した列車位置および環境変化検出システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3715211A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019093840A (ja) | 2019-06-20 |
| EP3715211A4 (en) | 2021-08-18 |
| US11453422B2 (en) | 2022-09-27 |
| US20200339171A1 (en) | 2020-10-29 |
| JP6986936B2 (ja) | 2021-12-22 |
| EP3715211A1 (en) | 2020-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019102769A1 (ja) | 車両制御システム | |
| CN107402006B (zh) | 基于轨道几何特征信息匹配的列车精密定位方法和系统 | |
| US20190392225A1 (en) | Facility inspection system and facility inspection method | |
| US9540018B2 (en) | Railway installation synchronization monitoring system | |
| AU2018425917B2 (en) | Apparatus and method for calculating wooden crosstie plate cut measurements and rail seat abrasion measurements based on rail head height | |
| US10551502B2 (en) | Positioning system for determining the position of a vehicle in a charging station | |
| US20160318531A1 (en) | Location and/or direction of travel detection system and method | |
| US10740936B2 (en) | Trolley-wire display device, trolley-wire display system, and trolley-wire display data creation method | |
| US10919550B2 (en) | Method and positioning device for determining the position of a track-guided vehicle, in particular a rail vehicle | |
| JP5698285B2 (ja) | 架線位置計測装置及び方法 | |
| JP5965251B2 (ja) | 軌道位置データ付与システム及び軌道位置データ付与方法 | |
| JP2021512813A (ja) | 鉄道車両および軌道区間を検測する方法 | |
| WO2021075210A1 (ja) | センサ性能評価システム及び方法、並びに、自動運転システム | |
| JP5476775B2 (ja) | トロリ線検測装置及び検測方法 | |
| US10712144B2 (en) | Trolley-wire measurement device and trolley-wire measurement method | |
| EP3069955A1 (en) | Train self-position estimation device | |
| KR101583707B1 (ko) | 전차선 편위 정보를 이용한 고정밀 열차 위치 검지 시스템 | |
| WO2023248737A1 (ja) | 速度算出装置、速度算出方法および移動体制御システム | |
| WO2023084728A1 (ja) | 距離標距離判定装置、距離標距離判定方法、および距離標距離判定プログラム | |
| JP5889041B2 (ja) | 走行道路判定装置及びその処理方法とプログラム | |
| KR20240056944A (ko) | 열차의 위치를 측정하는 열차 측위 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18880395 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE1 | Request for preliminary examination filed after expiration of 19th month from priority date (pct application filed from 20040101) | ||
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018880395 Country of ref document: EP Effective date: 20200622 |