WO2018211589A1 - 超音波センサ装置及び障害物検知装置 - Google Patents
超音波センサ装置及び障害物検知装置 Download PDFInfo
- Publication number
- WO2018211589A1 WO2018211589A1 PCT/JP2017/018349 JP2017018349W WO2018211589A1 WO 2018211589 A1 WO2018211589 A1 WO 2018211589A1 JP 2017018349 W JP2017018349 W JP 2017018349W WO 2018211589 A1 WO2018211589 A1 WO 2018211589A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- ultrasonic sensor
- mounting member
- hole
- radiation surface
- vibration
- Prior art date
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/521—Constructional features
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R19/00—Wheel guards; Radiator guards, e.g. grilles; Obstruction removers; Fittings damping bouncing force in collisions
- B60R19/02—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects
- B60R19/48—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects combined with, or convertible into, other devices or objects, e.g. bumpers combined with road brushes, bumpers convertible into beds
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R19/00—Wheel guards; Radiator guards, e.g. grilles; Obstruction removers; Fittings damping bouncing force in collisions
- B60R19/02—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects
- B60R19/48—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects combined with, or convertible into, other devices or objects, e.g. bumpers combined with road brushes, bumpers convertible into beds
- B60R19/483—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects combined with, or convertible into, other devices or objects, e.g. bumpers combined with road brushes, bumpers convertible into beds with obstacle sensors of electric or electronic type
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R1/00—Details of transducers, loudspeakers or microphones
- H04R1/20—Arrangements for obtaining desired frequency or directional characteristics
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/937—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details
- G01S2015/938—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details in the bumper area
Definitions
- the present invention relates to an ultrasonic sensor device and an obstacle detection device including an ultrasonic sensor, and in particular, an ultrasonic wave having a wide directivity characteristic in one direction and a narrow directivity characteristic in another direction perpendicular to the one direction.
- the present invention relates to a sensor device and an obstacle detection device.
- An ultrasonic sensor using a piezoelectric element is known as an ultrasonic sensor.
- This ultrasonic sensor is used in an obstacle detection device that detects an obstacle by transmitting an ultrasonic wave into the air and receiving an ultrasonic wave reflected by an obstacle or the like.
- it is mounted on a vehicle such as an automobile, that is, embedded in a bumper or the like of the vehicle and used as an obstacle detection device that detects an obstacle around the vehicle.
- the directivity characteristics of the ultrasonic sensor be wide directivity characteristics in the horizontal direction and narrow directivity characteristics in the vertical direction.
- the ultrasonic sensor device disclosed in Patent Document 1 is a method in which a piezoelectric element is bonded to the inside of a bottomed cylindrical case provided with a digging that is relatively long in one direction and relatively short in another direction.
- This is an ultrasonic transducer comprising a unimorph transducer. Transmission and reception of ultrasonic waves are performed on the outer surface of the bottomed cylindrical case. An opening that does not exceed this width is provided on the relatively short side surface of the bottomed cylindrical case to narrow the directivity.
- the bottomed cylindrical case is formed of a metal made of an aluminum material or the like.
- the bottomed cylindrical case is dug and an opening is formed by forging or cutting.
- digging and dimensional accuracy of the opening are important, and there is a problem that special processing is required.
- the present invention has been made in view of the above points, and does not require special processing, and has an directional characteristic narrower than the directional characteristic in one direction in another direction perpendicular to the one direction. And it aims at obtaining an obstacle detection apparatus.
- the radiation surface is exposed from the through hole of the mounting member having the through hole, and the vibration propagation preventing layer is interposed between the entire circumference of the side surface and the wall surface of the through hole of the mounting member.
- the ultrasonic sensor fixed to the mounting member is provided, and a vibration plane connecting the radiation surface of the ultrasonic sensor and the mounting member is passed through the center point of the radiation surface of the ultrasonic sensor and parallel to the radiation surface.
- the first straight line and the second straight line perpendicular to the first straight line are provided on one of the straight lines.
- the present invention has an effect that an ultrasonic sensor device having a directional characteristic narrower than the directional characteristic in one direction in another direction perpendicular to the one direction can be obtained without special processing.
- wire shown in FIG. FIG. 3 is a characteristic diagram showing normalized radiation sound pressure in the first embodiment.
- Embodiment 1 An ultrasonic sensor device and an obstacle detection device according to Embodiment 1 of the present invention will be described with reference to FIGS.
- the ultrasonic sensor device includes a mounting member 1, an ultrasonic sensor 2, a vibration propagation preventing layer 3, and diaphragms 41 and 42.
- this ultrasonic sensor device When this ultrasonic sensor device is mounted on a vehicle such as an automobile, that is, embedded and installed in a vehicle bumper or the like, it functions as an obstacle detection device that detects an obstacle around the vehicle. Even when functioning as an obstacle detection device, basically, an ultrasonic sensor device is used as a sensor for detecting obstacles around the vehicle. Therefore, the ultrasonic sensor device will be mainly described below.
- a through-hole 11 having a rectangular planar shape is formed in the mounting member 1.
- the attachment member 1 is molded from resin.
- the planar shape of the through hole 11 is a square.
- the attachment member 1 is constituted by a member separate from the member constituting the bumper in order to be attached to the bumper of the vehicle.
- a part of the bumper of the vehicle may be the mounting member 1 and the through hole 11 may be formed in a part of the bumper.
- the ultrasonic sensor 2 uses a piezoelectric element.
- the ultrasonic sensor 2 has a cylindrical shape having a radiation surface 22 for emitting ultrasonic waves on the surface.
- the ultrasonic sensor 2 includes a cylindrical main body case 21 having a radiation surface 22 for radiating ultrasonic waves on the surface, and a piezoelectric element incorporated in the main body case 21.
- the ultrasonic sensor 2 does not have a directional characteristic with a different direction. That is, the ultrasonic radiation from the radiation surface 22 has the same directivity characteristic for all radial directions of the radiation surface 22.
- the radiation surface 22 of the ultrasonic sensor 2 vibrates according to the applied electric signal, and an ultrasonic wave is emitted.
- the electrical signal applied from the transmission circuit is a pulse burst electrical signal.
- the emitted ultrasonic wave is reflected by the obstacle, and a part of the ultrasonic wave returns to the same ultrasonic sensor 2.
- the obstacle is detected by receiving the ultrasonic wave reflected from the obstacle.
- the obstacle detection apparatus which detects the obstacle around a vehicle was assumed and it demonstrated that an obstacle was detected, you may use for the use which detects a target object instead of an obstacle.
- the radiation surface 22 of the ultrasonic sensor 2 is exposed from the through hole 11 of the mounting member 1, and the entire circumference on the side surface of the cylindrical main body case 21 and the wall surface in the through hole 11 of the mounting member 1. It is fixed to the attachment member 1 via the vibration propagation preventing layer 3 therebetween.
- the ultrasonic sensor 2 has an end on the surface side from the back surface of the mounting member 1 inserted into the through hole 11 of the mounting member 1 and is fixed to the mounting member 1 by a fixing structure (not shown). .
- the insertion part in the through hole 11 of the attachment member 1 in the ultrasonic sensor 2 is an end portion on the surface side including the radiation surface 22 as shown in FIG.
- the fixing position of the ultrasonic sensor 2 with respect to the attachment member 1 is a position where the center point O on the radiation surface 22 of the ultrasonic sensor 2 coincides with the center point on the through hole 11 of the attachment member 1.
- the vibration propagation preventing layer 3 is a gap formed between the entire circumference on the side surface of the cylindrical ultrasonic sensor 2 and the wall surface of the through hole 11 of the mounting member 1.
- the diaphragms 41 and 42 pass through the center point O of the radiation surface 22 of the ultrasonic sensor 2 and are arranged on a second straight line in the horizontal plane parallel to the radiation surface, shown in the figure II-II.
- the second straight line is a straight line indicating a vertical direction when used as an obstacle detection device that detects an obstacle around the vehicle, and is a line perpendicular to the lower side of the mounting member 1.
- the diaphragms 41 and 42 are arranged on the second straight line.
- the first straight line that intersects the second straight line and the line II shown in the drawing are arranged. But it ’s okay.
- the diaphragms 41 and 42 are arranged on one of the second straight line II-II line and the first straight line II, and are not arranged on the other straight line. In other words, there is only a gap as the vibration propagation preventing layer 3 between the side surface of the ultrasonic sensor 2 on the first straight line II and the wall surface of the through hole 11 of the mounting member 1.
- the diaphragm 41 is located on the upper side in FIG. 1 and is formed by linearly extending from the mounting member 1 toward the center point of the through hole 11 on the second straight line II-II. That is, the diaphragm 41 is integrally formed with the mounting member 1 made of resin.
- the surface of the diaphragm 41 is formed flush with the surface of the mounting member 1, and the thickness is less than 1 ⁇ 2 of the thickness of the mounting member 1.
- the length is a length at which the front end is in contact with the edge of the radiation surface 22 of the ultrasonic sensor 2.
- the tip of the diaphragm 41 is connected at the edge of the radiation surface 22 of the ultrasonic sensor 2. Thereby, the vibration on the radiation surface 22 of the ultrasonic sensor 2 propagates to the diaphragm 41 and further propagates to the attachment member 1.
- the diaphragm 42 is located on the lower side in FIG. 1 and is opposed to the diaphragm 41 to form a pair.
- the diaphragm 42 is formed by linearly extending from the attachment member 1 toward the center point of the through hole 11 on the second straight line II-II. That is, the diaphragm 41 is integrally formed with the mounting member 1 made of resin.
- the surface of the diaphragm 42 is formed flush with the surface of the mounting member 1, and the thickness is less than 1 ⁇ 2 of the thickness of the mounting member 1.
- the length is a length at which the front end is in contact with the edge of the radiation surface 22 of the ultrasonic sensor 2.
- the tip of the diaphragm 41 is connected at the edge of the radiation surface 22 of the ultrasonic sensor 2. Thereby, the vibration on the radiation surface 22 of the ultrasonic sensor 2 propagates to the diaphragm 41 and further propagates to the attachment member 1.
- the operation of the ultrasonic sensor device will be described.
- the radiation surface 22 of the ultrasonic sensor 2 vibrates, air is vibrated by the vibration, and ultrasonic waves are emitted. Since the radiation surface 22 of the ultrasonic sensor 2 communicates with the mounting member 1 via the vibration plates 41 and 42, the vibration on the radiation surface 22 of the ultrasonic sensor 2 propagates to the vibration plates 41 and 42. Further, it propagates to the mounting member 1. As a result, the ultrasonic waves are radiated from the radiation surface 22 of the ultrasonic sensor 2, the diaphragms 41 and 42, and the mounting member 1.
- the vibration of the radiation surface 22 of the ultrasonic sensor 2 is attached via the diaphragms 41 and 42. Since it propagates to the member 1, ultrasonic waves are generated by the vibration of the radiation surface 22 of the ultrasonic sensor 2, the vibrations of the vibration plates 41 and 42, and the vibration of the mounting member 1, and each is synthesized and radiated.
- ultrasonic waves are emitted by the vibration of the radiation surface 22 of the ultrasonic sensor 2 and the vibration of the mounting member 1. .
- an ultrasonic wave in which the vibration of the ultrasonic sensor 2 is dominant is emitted.
- the vibration of the radiation surface 22 of the ultrasonic sensor 2 propagates to the mounting member 1 in the second direction in which the diaphragm 41 and the diaphragm 42 are provided. Since it is difficult, the vibration distribution in the attachment member 1 is different between the second direction and the first direction. In short, since the vibration serving as the ultrasonic excitation source is different between the second direction and the first direction, the ultrasonic sensor device according to the first embodiment has different directivity characteristics in the second direction and the first direction. The ultrasonic wave which has is emitted.
- FIG. 3 shows the vibration displacement on the second straight line II-II and the first straight line II at this time.
- the horizontal axis is the position [mm] on the surface of the mounting member 1 and the diaphragms 41 and 42
- the vertical axis is the vibration displacement [ ⁇ m]
- the curve A shown by the solid line is when the ultrasonic sensor 2 is driven.
- the curve B shown by the broken line is the surface of the mounting member 1 when the ultrasonic sensor 2 is driven.
- the vibration displacement calculation result on the 1st straight line II is shown.
- the origin 0 indicated by the horizontal axis indicates the position of the center point O on the radiation surface 22 of the ultrasonic sensor 2.
- the vibration displacement at the radiation surface 22 of the ultrasonic sensor 2 is not shown.
- the vibration of the radiation surface 22 generated by driving the ultrasonic sensor 2 propagates to the mounting member 1 through the vibration plates 41 and 42, so that the mounting member 1 also vibrates.
- the distribution of vibration displacement differs between the second straight line II-II and the first straight line II. Since the vibration on the radiation surface 22 of the ultrasonic sensor 2 propagates to the mounting member 1 via the diaphragms 41 and 42, the second direction in which the diaphragms 41 and 42 exist and the first in which there is no diaphragm. Since the way of propagation is different from the direction of, the distribution of vibration displacement is also different.
- the horizontal axis represents the angle [deg] at which ultrasonic waves are emitted with reference to the ultrasonic sensor 2
- the vertical axis represents the normalized radiation sound pressure normalized by the maximum value
- the curve A indicated by the solid line represents the second Directivity obtained by calculation in the direction
- a curve B indicated by a broken line indicates directivity obtained by calculation in the first direction.
- the directivity characteristic in the second direction indicated by the curve A is different from the directivity characteristic in the first direction indicated by the curve B.
- the directivity is narrowed since the radiation surface 22 of the ultrasonic sensor 2, the vibration plates 41 and 42, and the mounting member 1 vibrate in a wide range.
- the vibration of the radiation surface 22 of the ultrasonic sensor 2 becomes dominant and the vibration range is narrow, so that the directivity is widened.
- the ultrasonic sensor device according to the first embodiment uses the ultrasonic sensor 2 having the same directivity characteristics in the first direction and the second direction, and the directivity characteristics in the second direction are the same in the first direction.
- a directional characteristic narrower than the directional characteristic is obtained. That is, the first direction shows wide directivity, and the second direction shows narrow directivity.
- the ultrasonic sensor device configured as described above is used as an obstacle detection device that detects an obstacle around the vehicle.
- the ultrasonic sensor device is embedded in a vehicle bumper or the like so that the second direction is the vertical direction and the first direction is the horizontal direction.
- the obstacle detection device becomes a detection system that exhibits a wide directional characteristic in the horizontal direction and a narrow directional characteristic in the vertical direction. Therefore, since the horizontal direction has a wide directivity characteristic, an obstacle around the vehicle that hinders the movement of the vehicle can be reliably detected.
- the vertical direction has narrow directivity characteristics, the road surface or the like that does not hinder movement is not detected.
- front sensitivity is good, long distances can be detected, and erroneous detection due to the ground or the like when detecting long distances can be prevented. Stable obstacle detection from a long distance to a short distance can be realized with high reliability without malfunction.
- the radiation surface is exposed from the through hole of the mounting member having the through hole, and the entire circumference of the side surface and the through hole of the mounting member are exposed.
- the ultrasonic sensor is fixed to the mounting member via a vibration propagation preventing layer between the first straight line and the first straight line in the horizontal plane parallel to the radiation surface through the center point of the radiation surface of the ultrasonic sensor. Since the diaphragm for connecting the radiation surface of the ultrasonic sensor and the mounting member is provided on any one of the second straight lines that intersect perpendicularly with the straight line, one direction in which the diaphragm is provided is This has the effect of narrowing the directivity with respect to the other direction where there is no diaphragm.
- the diaphragms 41 and 42 are connected to the radiation surface 22 of the ultrasonic sensor 2, there is an effect that the ultrasonic sensor 2 can be prevented from jumping out from the surface of the mounting member 1. Further, the ultrasonic sensor 2 is inserted into the through hole 11 from the back side of the mounting member 1 so that the center point O on the radiation surface 22 of the ultrasonic sensor 2 coincides with the central point of the through hole 11 of the mounting member 1.
- a simple method without fixing the acoustic wave sensor 2 to the mounting member 1 has an effect that a wide directivity characteristic in the first direction and a narrow directivity characteristic in the second direction can be obtained with high accuracy. .
- the horizontal direction shows the wide directivity characteristic and the vertical direction shows the narrow directivity characteristic.
- the road surface and the like that can be detected easily and without hindering movement are not detected, and stable obstacle detection from a long distance to a short distance can be realized without malfunction and with high reliability.
- FIG. 2 An ultrasonic sensor device and an obstacle detection device according to Embodiment 2 of the present invention will be described with reference to FIG.
- the second embodiment is different from the first embodiment in that the first embodiment has a rectangular shape in the through hole 11 of the mounting member 1, whereas the second embodiment has a shape in the through hole 12 of the mounting member 1.
- the difference is that the shape is circular.
- the other points are the same. Even in the second embodiment configured as described above, the same effect as in the first embodiment can be obtained.
- the same reference numerals as those in FIGS. 1 and 2 denote the same or corresponding parts.
- the shape of the through hole 12 of the attachment member 1 is not limited to a circle, but may be a polygon such as an octagon. Of the polygons, a point-symmetric shape is preferable.
- Embodiment 3 An ultrasonic sensor device and an obstacle detection device according to Embodiment 3 of the present invention will be described with reference to FIGS.
- the third embodiment is different from the first embodiment in that the vibration propagation preventing layer 3 is formed as a gap formed between the side surface of the ultrasonic sensor 2 and the wall surface of the through hole 11 of the mounting member 1.
- the third embodiment is different from the first embodiment in that a member made of a material that is less likely to propagate ultrasonic waves than the diaphragms 41 and 42 is inserted into the gap to form the vibration propagation preventing layer 31.
- the other points are the same. 6 and 7, the same reference numerals as those in FIGS. 1 and 2 denote the same or corresponding parts.
- the vibration propagation preventing layer 31 may be a material that is less likely to transmit ultrasonic waves than the vibration plates 41 and 42, and may be a resin different from the attachment member 1. That is, it is only necessary that the vibration of the radiation surface of the ultrasonic sensor 2 is not propagated to the mounting member 1 from other than the diaphragms 41 and 42, and the vibration propagation prevention layer 31 is less likely to propagate ultrasonic waves than the diaphragms 41 and 42. Any material can be used. Even in the third embodiment configured as described above, the same effect as in the first embodiment can be obtained.
- the vibration propagation preventing layer 31 is in close contact between the side surface of the ultrasonic sensor 2 and the wall surface of the through hole 11 of the attachment member 1, thereby fixing the ultrasonic sensor 2 to the attachment member 1 in vibration propagation. This can be done with the prevention layer 3 and does not require any other fixing structure.
- FIG. 4 An ultrasonic sensor device and an obstacle detection device according to Embodiment 4 of the present invention will be described with reference to FIG.
- the fourth embodiment is different from the first embodiment in that the first embodiment is formed by integrally forming the diaphragms 41 and 42 with the mounting member 1, whereas the fourth embodiment is the mounting member 1.
- the difference is that the diaphragms 43 and 44 are provided by different members.
- the other points are the same.
- the same reference numerals as those in FIGS. 1 and 2 denote the same or corresponding parts.
- the surfaces of the diaphragms 43 and 44 are flush with the surface of the mounting member 1 and are coupled to the mounting member 1 at one end surface.
- the thickness is less than 1 ⁇ 2 of the thickness of the mounting member 1.
- the tip portion located on the other end surface side is connected at the edge of the radiation surface 22 of the ultrasonic sensor 2. Thereby, the vibration on the radiation surface 22 of the ultrasonic sensor 2 propagates to the diaphragms 43 and 44 and further propagates to the attachment member 1.
- the material of the diaphragms 43 and 44 may be any material that allows ultrasonic waves to propagate, and may be a metal or a resin different from the attachment member 1. Even in the fourth embodiment configured as described above, the same effect as in the first embodiment can be obtained.
- FIG. 5 An ultrasonic sensor device and an obstacle detection device according to Embodiment 5 of the present invention will be described with reference to FIG.
- the fifth embodiment is different from the fourth embodiment in that the fourth embodiment has a structure in which the diaphragms 43 and 44 are joined to the mounting member 1 at one end surface with the surfaces thereof being flush with the surface of the mounting member 1.
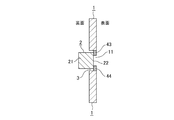
- the fifth embodiment is different in that the diaphragms 45 and 46 are structured to be coupled to the surface of the mounting member 1 at the rear surface of the rear end portion.
- the other points are the same.
- FIG. 9 the same reference numerals as those in FIGS. 1 and 2 denote the same or corresponding parts.
- the thickness of the diaphragms 45 and 46 is less than 1 ⁇ 2 of the thickness of the mounting member 1.
- the back surfaces of the tip portions of the diaphragms 45 and 46 are connected by the edge of the radiation surface 22 of the ultrasonic sensor 2.
- vibration on the radiation surface 22 of the ultrasonic sensor 2 propagates to the diaphragms 45 and 46 and further propagates to the mounting member 1.
- the material of the diaphragms 45 and 46 may be any material that allows ultrasonic waves to propagate, and may be the same resin as the attachment member 1 or a metal or a resin different from the attachment member 1. Even in the fifth embodiment configured as described above, the same effect as in the first embodiment can be obtained.
- any combination of each embodiment, any component of each embodiment can be modified, or any component can be omitted in each embodiment. .
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Signal Processing (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Transducers For Ultrasonic Waves (AREA)
Abstract
取付け部材(1)は貫通孔(11)を有する。超音波センサ(2)は取付け部材(1)の貫通孔(11)から超音波センサ(2)の放射面(22)が露出して取付け部材(1)に固定される。振動伝搬防止層(3)が超音波センサ(2)の側面の全周と取付け部材(1)の貫通孔(11)の壁面との間に介在する。振動板(41)及び(42)は超音波センサ(2)の放射面(22)の中心点を通り、放射面(22)と平行な水平面における第1の直線とこの第1の直線と垂直に交わる第2の直線のいずれか一方の直線上に設けられ、超音波センサ(2)の放射面(22)と取付け部材(1)とを連結する。
Description
この発明は、超音波センサを備えた超音波センサ装置及び障害物検知装置に係り、特に、一方向に広指向特性を有し、当該一方向と垂直な他方向に狭指向特性を有する超音波センサ装置及び障害物検知装置に関するものである。
超音波センサとして圧電素子を用いた超音波センサが知られている。この超音波センサは、超音波を空気中に送信し、障害物等により反射された超音波を受信することにより、障害物を検知する障害物検知装置に利用されている。
例えば、自動車等の車両に搭載、つまり、当該車両のバンパー等に埋め込み、当該車両周辺の障害物を検出する障害物検知装置として利用されている。
例えば、自動車等の車両に搭載、つまり、当該車両のバンパー等に埋め込み、当該車両周辺の障害物を検出する障害物検知装置として利用されている。
このような障害物検知装置では、車両の移動の妨げとなる車両周辺の障害物を確実に検知するとともに、車両の移動の妨げとならない、路面等は検知しないようにする必要がある。そのためには、超音波センサの指向特性を水平方向は広指向特性とし、垂直方向は狭指向特性とすることが望ましい。
このため、車両に搭載された障害物検知装置に用いられ、水平方向と垂直方向とで異なる指向特性を有する超音波センサ装置として特許文献1に示されたものが提案されている。
この特許文献1に示された超音波センサ装置は、一方向で比較的長く、別な方向で比較的短くなる様な掘り込みを設けた有底筒状ケースの底面内部に圧電素子を貼り合わせてユニモルフ振動子を構成した超音波送受波器である。超音波の送信、受信は有底筒状ケースの外側面にて行なわれる。有底筒状ケースの比較的短い側の側面に、この幅を超えない様な開口部を設け、指向性を狭くしている。
この特許文献1に示された超音波センサ装置は、一方向で比較的長く、別な方向で比較的短くなる様な掘り込みを設けた有底筒状ケースの底面内部に圧電素子を貼り合わせてユニモルフ振動子を構成した超音波送受波器である。超音波の送信、受信は有底筒状ケースの外側面にて行なわれる。有底筒状ケースの比較的短い側の側面に、この幅を超えない様な開口部を設け、指向性を狭くしている。
特許文献1に示された超音波センサ装置は、有底筒状ケースが、アルミニウム材等からなる金属で形成されている。この有底筒状ケースに掘り込み及び開口部を鍛造加工あるいは切削加工等により形成するのが一般的である。
しかしながら、指向特性を制御するためには、掘り込み及び開口部の寸法精度が重要であり、特別な加工が必要となるという問題点がある。
しかしながら、指向特性を制御するためには、掘り込み及び開口部の寸法精度が重要であり、特別な加工が必要となるという問題点がある。
この発明は、上記した点に鑑みてなされたものであり、特別な加工を施す必要がなく、一方向と垂直な他方向に、当該一方向における指向特性より狭い指向特性を有する超音波センサ装置及び障害物検知装置を得ることを目的とするものである。
この発明に係る超音波センサ装置は、貫通孔を有する取付け部材の貫通孔から放射面が露出し、かつ、側面の全周と取付け部材の貫通孔の壁面との間に振動伝搬防止層を介し、取付け部材に固定される超音波センサを備え、この超音波センサの放射面と、取付け部材とを連結する振動板を、超音波センサの放射面の中心点を通り、放射面と平行な水平面における第1の直線とこの第1の直線と垂直に交わる第2の直線のいずれか一方の直線上に設けたものである。
この発明は、一方向と垂直な他方向に、当該一方向における指向特性より狭い指向特性を有する超音波センサ装置を、特別な加工を施すことなく、得られるという効果を奏する。
実施の形態1.
この発明の実施の形態1に係る超音波センサ装置及び障害物検知装置を図1及び図2に基づいて説明する。
超音波センサ装置は、取付け部材1と、超音波センサ2と、振動伝搬防止層3と、振動板41及び42とを備えている。この超音波センサ装置が自動車等の車両に搭載、つまり、車両のバンパー等に埋め込み、設置されて使用される場合は、車両周辺の障害物を検出する障害物検知装置として機能する。
障害物検知装置として機能する場合も、基本的には超音波センサ装置を車両周辺の障害物を検出するセンサとして利用したものである。したがって、以下、超音波センサ装置を中心に説明する。
この発明の実施の形態1に係る超音波センサ装置及び障害物検知装置を図1及び図2に基づいて説明する。
超音波センサ装置は、取付け部材1と、超音波センサ2と、振動伝搬防止層3と、振動板41及び42とを備えている。この超音波センサ装置が自動車等の車両に搭載、つまり、車両のバンパー等に埋め込み、設置されて使用される場合は、車両周辺の障害物を検出する障害物検知装置として機能する。
障害物検知装置として機能する場合も、基本的には超音波センサ装置を車両周辺の障害物を検出するセンサとして利用したものである。したがって、以下、超音波センサ装置を中心に説明する。
取付け部材1に平面形状が矩形である貫通孔11が形成されている。取付け部材1は樹脂にて成型される。貫通孔11の平面形状は正方形である。なお、車両周辺の障害物を検出する障害物検知装置として使用される場合、取付け部材1は車両のバンパーに取り付けるために、バンパーを構成する部材と別部材で構成される。また、車両のバンパーの一部を取付け部材1とし、バンパーの一部に貫通孔11を形成するものでも良い。
超音波センサ2は圧電素子を用いたものである。超音波センサ2は表面に超音波を放射する放射面22を有する円筒状である。超音波センサ2は表面に超音波を放射する放射面22を有する円筒状の本体ケース21と、この本体ケース21の内部に組み込まれた圧電素子とを備えている。超音波センサ2は異方向性の指向特性を持たない、つまり、放射面22からの超音波の放射は、放射面22の半径方向全てに対して同じ指向特性を有している。この超音波センサ2は図示しない送信回路から電気信号が印加されると、印加された電気信号に応じて超音波センサ2の放射面22が振動し、超音波が放射される。送信回路から印加される電気信号はパルスバースト電気信号である。超音波の放射方向に障害物が存在した場合、放射された超音波が障害物で反射し、超音波の一部は同じ超音波センサ2に戻ってくる。障害物から反射された超音波を受信することにより、障害物を検出している。
なお、車両周辺の障害物を検出する障害物検知装置を想定し、障害物を検出する旨説明したが、障害物ではなく、目的物を検出する用途に用いても良い。
なお、車両周辺の障害物を検出する障害物検知装置を想定し、障害物を検出する旨説明したが、障害物ではなく、目的物を検出する用途に用いても良い。
超音波センサ2は超音波センサ2の放射面22が取付け部材1の貫通孔11から露出し、かつ、円筒状の本体ケース21の側面における全周と取付け部材1の貫通孔11における壁面との間に振動伝搬防止層3を介して取付け部材1に固定される。
この実施の形態1では、超音波センサ2は、取付け部材1の裏面から表面側の端部が取付け部材1の貫通孔11に挿入され、図示しない固定構造にて取付け部材1に固定されている。超音波センサ2における取付け部材1の貫通孔11における挿入部分は、図2に示すように放射面22を含む表面側の端部である。超音波センサ2の取付け部材1に対する固定位置は、超音波センサ2の放射面22における中心点Oが取付け部材1の貫通孔11における中心点と一致した位置である。
また、振動伝搬防止層3は、円筒状の超音波センサ2の側面における全周囲と取付け部材1の貫通孔11における壁面との間に形成される空隙である。
この実施の形態1では、超音波センサ2は、取付け部材1の裏面から表面側の端部が取付け部材1の貫通孔11に挿入され、図示しない固定構造にて取付け部材1に固定されている。超音波センサ2における取付け部材1の貫通孔11における挿入部分は、図2に示すように放射面22を含む表面側の端部である。超音波センサ2の取付け部材1に対する固定位置は、超音波センサ2の放射面22における中心点Oが取付け部材1の貫通孔11における中心点と一致した位置である。
また、振動伝搬防止層3は、円筒状の超音波センサ2の側面における全周囲と取付け部材1の貫通孔11における壁面との間に形成される空隙である。
振動板41及び42は超音波センサ2の放射面22の中心点Oを通り、前記放射面と平行な水平面における第2の直線、図示II-II線上に配置される。この第2の直線は車両周辺の障害物を検出する障害物検知装置として使用される場合、垂直方向を示す直線であり、取付け部材1の下辺に対して垂直な線である。この実施の形態1においては、振動板41及び42を第2の直線上に配置したが、用途によっては、第2の直線と垂直に交わる第1の直線、図示I-I線上に配置したものでも良い。いずれにしても、振動板41及び42は第2の直線II-II線と第1の直線I-I線のいずれか一方の直線上に配置され、他方の直線上には配置されない。つまり、第1の直線I-I線上における超音波センサ2の側面と取付け部材1の貫通孔11の壁面との間には振動伝搬防止層3である空隙が介在するだけである。
振動板41は、図1における上側に位置し、第2の直線II-II線上において、取付け部材1から貫通孔11の中心点に向かって直線的に延伸されて形成される。すなわち、振動板41は樹脂である取付け部材1と一体成型される。振動板41の表面は取付け部材1の表面と面一に形成され、厚さは取付け部材1の厚さの1/2未満である。また、長さは先端部が超音波センサ2の放射面22の縁部に接する長さである。振動板41の先端部は超音波センサ2の放射面22の縁部で連結される。これにより、超音波センサ2の放射面22での振動が振動板41に伝搬し、さらに取付け部材1へと伝搬されることになる。
振動板42は、図1における下側に位置して振動板41と対向して対をなしている。振動板42は、第2の直線II-II線上において、取付け部材1から貫通孔11の中心点に向かって直線的に延伸されて形成される。すなわち、振動板41は樹脂である取付け部材1と一体成型される。振動板42の表面は取付け部材1の表面と面一に形成され、厚さは取付け部材1の厚さの1/2未満である。また、長さは先端部が超音波センサ2の放射面22の縁部に接する長さである。振動板41の先端部は超音波センサ2の放射面22の縁部で連結される。これにより、超音波センサ2の放射面22での振動が振動板41に伝搬し、さらに取付け部材1へと伝搬されることになる。
次に、実施の形態1の超音波センサ装置に動作について説明する。
超音波センサ2に送信回路から電気信号が印加されると、超音波センサ2の放射面22が振動し、その振動により空気が振動させられ、超音波が放射される。超音波センサ2の放射面22は、振動板41及び42を介して取付け部材1と連絡されているため、超音波センサ2の放射面22での振動は、振動板41及び42に伝搬し、さらに取付け部材1へと伝搬する。
その結果、超音波は超音波センサ2の放射面22、振動板41及び42、及び取付け部材1から放射されることになる。
超音波センサ2に送信回路から電気信号が印加されると、超音波センサ2の放射面22が振動し、その振動により空気が振動させられ、超音波が放射される。超音波センサ2の放射面22は、振動板41及び42を介して取付け部材1と連絡されているため、超音波センサ2の放射面22での振動は、振動板41及び42に伝搬し、さらに取付け部材1へと伝搬する。
その結果、超音波は超音波センサ2の放射面22、振動板41及び42、及び取付け部材1から放射されることになる。
したがって、振動板41及び振動板42が設けられた第2の直線II-II線に沿った第2の方向では、超音波センサ2の放射面22の振動が振動板41及び42を介して取付け部材1に伝搬するため、超音波センサ2の放射面22の振動、振動板41及び42の振動、ならびに取付け部材1の振動により超音波が生じ、それぞれが合成され、放射される。
一方、振動板が存在しない第1の直線I-I線に沿った第1の方向では、超音波センサ2の放射面22の振動と取付け部材1の振動により超音波が放射されることとなる。しかし、超音波センサ2の振動が支配的である超音波が放射される。
一方、振動板が存在しない第1の直線I-I線に沿った第1の方向では、超音波センサ2の放射面22の振動と取付け部材1の振動により超音波が放射されることとなる。しかし、超音波センサ2の振動が支配的である超音波が放射される。
すなわち、振動板41が存在しない第1の方向では、振動板41及び振動板42が設けられた第2の方向に対して、超音波センサ2の放射面22の振動が取付け部材1に伝搬しにくいため、取付け部材1における振動の分布は、第2の方向と第1の方向とで異なる。
要するに、第2の方向と第1の方向では超音波の励振源となる振動が異なるため、この実施の形態1における超音波センサ装置は第2の方向と第1の方向とで異なる指向特性を有する超音波を放射することとなる。
要するに、第2の方向と第1の方向では超音波の励振源となる振動が異なるため、この実施の形態1における超音波センサ装置は第2の方向と第1の方向とで異なる指向特性を有する超音波を放射することとなる。
この時の第2の直線II-II線上と第1の直線I-I線上の振動変位を図3に示す。図3において、横軸は取付け部材1と振動板41及び42の表面での位置[mm]、縦軸は振動変位[μm]、実線で示す曲線Aは超音波センサ2を駆動させたときの取付け部材1と振動板41及び42の表面での第2の直線II-II線上の振動変位計算結果、破線で示す曲線Bは超音波センサ2を駆動させたときの取付け部材1の表面での第1の直線I-I線上の振動変位計算結果を示す。横軸にて示す原点0は超音波センサ2の放射面22における中心点Oの位置を示す。なお、超音波センサ2の放射面22での振動変位は図示していない。
この図3からも理解されるように、超音波センサ2を駆動することにより生じる放射面22の振動は、振動板41及び42を介して取付け部材1に伝搬するため、取付け部材1も振動する。しかし、第2の直線II-II線上と第1の直線I-I線上では、振動変位の分布が異なっている。超音波センサ2の放射面22における振動は、振動板41及び42を経由して取付け部材1に伝搬するため、振動板41及び42が存在する第2の方向と、振動板が存在しない第1の方向とでは、伝搬の仕方が異なるため、振動変位の分布の様子も異なることとなる。
次に、この実施の形態1に係る超音波センサ装置の指向特性を、図4を用いて説明する。図4において、横軸は超音波センサ2を基準とした超音波が放射される角度[deg]、縦軸は最大値で規格化した規格化放射音圧、実線で示す曲線Aは第2の方向における計算により求めた指向特性、破線で示す曲線Bは第1の方向における計算により求めた指向特性を示す。
この図4から理解されるように、曲線Aにて示す第2の方向の指向特性と、曲線Bにて示す第1の方向の指向特性は異なっている。第2の方向では、超音波センサ2の放射面22、振動板41及び42、並びに取付け部材1の広範囲で振動しているため、指向特性が狭められる。一方、第1の方向では超音波センサ2の放射面22の振動が支配的となり、振動範囲が狭いため、指向特性は広くなる。
要するに、この実施の形態1に係る超音波センサ装置は、第1の方向及び第2の方向の指向特性が同じ超音波センサ2を用いて、第2の方向における指向特性が第1の方向における指向特性より狭い指向特性を得られているものである。つまり、第1の方向は広指向特性を、第2の方向は狭指向特性を示している。
要するに、この実施の形態1に係る超音波センサ装置は、第1の方向及び第2の方向の指向特性が同じ超音波センサ2を用いて、第2の方向における指向特性が第1の方向における指向特性より狭い指向特性を得られているものである。つまり、第1の方向は広指向特性を、第2の方向は狭指向特性を示している。
次に、このように構成された超音波センサ装置を、車両周辺の障害物を検出する障害物検知装置として使用した場合について説明する。この場合、第2の方向が垂直方向に、第1の方向が水平方向になるように、超音波センサ装置を車両のバンパー等に埋め込み、設置する。
この結果、障害物検知装置は、水平方向に広指向特性を、垂直方向に狭指向特性を示す検知システムになる。
したがって、水平方向が広指向特性であるため、車両の移動の妨げとなる車両周辺の障害物を確実に検知できる。また、垂直方向が狭指向特性であるため、移動の妨げとならない、路面等は検知しないことになる。
要するに、正面感度が良く、長距離を検知でき、かつ、長距離を検知する場合の地面等による誤検知を防ぐことができる。長距離から近距離まで安定した障害物検知を誤作動無く、高い信頼性で実現できることになる。
この結果、障害物検知装置は、水平方向に広指向特性を、垂直方向に狭指向特性を示す検知システムになる。
したがって、水平方向が広指向特性であるため、車両の移動の妨げとなる車両周辺の障害物を確実に検知できる。また、垂直方向が狭指向特性であるため、移動の妨げとならない、路面等は検知しないことになる。
要するに、正面感度が良く、長距離を検知でき、かつ、長距離を検知する場合の地面等による誤検知を防ぐことができる。長距離から近距離まで安定した障害物検知を誤作動無く、高い信頼性で実現できることになる。
以上述べたように、この実施の形態1に係る超音波センサ装置にあっては、貫通孔を有する取付け部材の貫通孔から放射面が露出し、かつ、側面の全周と取付け部材の貫通孔の壁面との間に振動伝搬防止層を介し、超音波センサが取付け部材に固定され、超音波センサの放射面の中心点を通り、放射面と平行な水平面における第1の直線とこの第1の直線と垂直に交わる第2の直線のいずれか一方の直線上に、超音波センサの放射面と取付け部材とを連結する振動板を設けたので、振動板が設けられた一方の方向が、振動板が存在しない他方の方向に対して指向特性を狭くできるという効果を有する。
また、振動板41及び42が超音波センサ2の放射面22と連結されているため、超音波センサ2が取付け部材1の表面から飛び出すことを防止できるという効果も有する。
さらに、超音波センサ2の放射面22における中心点Oと取付け部材1の貫通孔11における中心点と一致させて、超音波センサ2を取付け部材1の裏面側から貫通孔11に挿入し、超音波センサ2を取付け部材1に固定するという特別な加工を施すことなく簡単な方法によって、第1の方向に広指向特性を、第2の方向に狭指向特性を精度高く得られるという効果を有する。
さらに、超音波センサ2の放射面22における中心点Oと取付け部材1の貫通孔11における中心点と一致させて、超音波センサ2を取付け部材1の裏面側から貫通孔11に挿入し、超音波センサ2を取付け部材1に固定するという特別な加工を施すことなく簡単な方法によって、第1の方向に広指向特性を、第2の方向に狭指向特性を精度高く得られるという効果を有する。
また、この実施の形態1に係る障害物検知装置にあっては、水平方向が広指向特性を、垂直方向が狭指向特性を示すので、車両の移動の妨げとなる車両周辺の障害物を確実に検知でき、かつ、移動の妨げとならない路面等は検知せず、長距離から近距離まで安定した障害物検知を誤作動無く、高い信頼性で実現できるという効果を有する。
実施の形態2.
この発明の実施の形態2に係る超音波センサ装置及び障害物検知装置を図5に基づいて説明する。
この実施の形態2は実施の形態1に対して、実施の形態1が取付け部材1の貫通孔11における形状が矩形であるのに対して、実施の形態2では取付け部材1の貫通孔12における形状を円形にした点が相違する。その他の点は同じである。
このように構成した実施の形態2にあっても実施の形態1と同様の効果を得ることができる。
なお、図5中、図1及び図2と同一符号は同一又は相当部分を示す。
また、取付け部材1の貫通孔12における形状を円形に限ることなく、8角形などの多角形でも良い。なお、多角形のうちでも、点対称となる形状が良い。
この発明の実施の形態2に係る超音波センサ装置及び障害物検知装置を図5に基づいて説明する。
この実施の形態2は実施の形態1に対して、実施の形態1が取付け部材1の貫通孔11における形状が矩形であるのに対して、実施の形態2では取付け部材1の貫通孔12における形状を円形にした点が相違する。その他の点は同じである。
このように構成した実施の形態2にあっても実施の形態1と同様の効果を得ることができる。
なお、図5中、図1及び図2と同一符号は同一又は相当部分を示す。
また、取付け部材1の貫通孔12における形状を円形に限ることなく、8角形などの多角形でも良い。なお、多角形のうちでも、点対称となる形状が良い。
実施の形態3.
この発明の実施の形態3に係る超音波センサ装置及び障害物検知装置を図6及び図7に基づいて説明する。
この実施の形態3は実施の形態1に対して、実施の形態1が振動伝搬防止層3を超音波センサ2の側面と取付け部材1の貫通孔11の壁面との間に形成される空隙としているのに対して、実施の形態3ではこの空隙に振動板41及び42より超音波が伝搬しにくい材料からなる部材を挿入して振動伝搬防止層31となしている点が相違する。その他の点は同じである。
なお、図6及び図7中、図1及び図2と同一符号は同一又は相当部分を示す。
この発明の実施の形態3に係る超音波センサ装置及び障害物検知装置を図6及び図7に基づいて説明する。
この実施の形態3は実施の形態1に対して、実施の形態1が振動伝搬防止層3を超音波センサ2の側面と取付け部材1の貫通孔11の壁面との間に形成される空隙としているのに対して、実施の形態3ではこの空隙に振動板41及び42より超音波が伝搬しにくい材料からなる部材を挿入して振動伝搬防止層31となしている点が相違する。その他の点は同じである。
なお、図6及び図7中、図1及び図2と同一符号は同一又は相当部分を示す。
振動伝搬防止層31は振動板41及び42より超音波が伝搬しにくい材料であれば良く、取付け部材1と異なる樹脂でよい。すなわち、超音波センサ2の放射面の振動が振動板41及び42以外から取付け部材1に伝搬しないようにすればよく、振動伝搬防止層31は、振動板41及び42より超音波が伝搬しにくい材料であればよい。
このように構成した実施の形態3にあっても実施の形態1と同様の効果を得ることができる。
さらに、振動伝搬防止層31が超音波センサ2の側面と取付け部材1の貫通孔11の壁面との間に密着する構成にすることにより、超音波センサ2の取付け部材1への固定を振動伝搬防止層3にて行うことができ、他の固定構造を必要としないものである。
このように構成した実施の形態3にあっても実施の形態1と同様の効果を得ることができる。
さらに、振動伝搬防止層31が超音波センサ2の側面と取付け部材1の貫通孔11の壁面との間に密着する構成にすることにより、超音波センサ2の取付け部材1への固定を振動伝搬防止層3にて行うことができ、他の固定構造を必要としないものである。
実施の形態4.
この発明の実施の形態4に係る超音波センサ装置及び障害物検知装置を図8に基づいて説明する。
この実施の形態4は実施の形態1に対して、実施の形態1が振動板41及び42を取付け部材1と一体成型により形成したものであるのに対して、実施の形態4では取付け部材1とは異なる部材にて振動板43及び44を設けた点が相違する。その他の点は同じである。
なお、図8中、図1及び図2と同一符号は同一又は相当部分を示す。
この発明の実施の形態4に係る超音波センサ装置及び障害物検知装置を図8に基づいて説明する。
この実施の形態4は実施の形態1に対して、実施の形態1が振動板41及び42を取付け部材1と一体成型により形成したものであるのに対して、実施の形態4では取付け部材1とは異なる部材にて振動板43及び44を設けた点が相違する。その他の点は同じである。
なお、図8中、図1及び図2と同一符号は同一又は相当部分を示す。
振動板43及び44の表面は取付け部材1の表面と面一にされて、一端面にて取付け部材1に結合される。厚さは取付け部材1の厚さの1/2未満である。他端面側に位置する先端部が超音波センサ2の放射面22の縁部で連結される。これにより、超音波センサ2の放射面22での振動が振動板43及び44に伝搬し、さらに取付け部材1へと伝搬されることになる。振動板43及び44の材料は、超音波が伝搬する材料であれば良く、金属又は取付け部材1とは異なる樹脂であっても良い。
このように構成した実施の形態4にあっても実施の形態1と同様の効果を得ることができる。
このように構成した実施の形態4にあっても実施の形態1と同様の効果を得ることができる。
実施の形態5.
この発明の実施の形態5に係る超音波センサ装置及び障害物検知装置を図9に基づいて説明する。
この実施の形態5は実施の形態4に対して、実施の形態4が振動板43及び44をその表面が取付け部材1の表面と面一にして一端面にて取付け部材1に結合される構造としたのに対して、実施の形態5では振動板45及び46をその後端部の裏面にて取付け部材1の表面に結合される構造とした点が相違する。その他の点は同じである。
なお、図9中、図1及び図2と同一符号は同一又は相当部分を示す。
この発明の実施の形態5に係る超音波センサ装置及び障害物検知装置を図9に基づいて説明する。
この実施の形態5は実施の形態4に対して、実施の形態4が振動板43及び44をその表面が取付け部材1の表面と面一にして一端面にて取付け部材1に結合される構造としたのに対して、実施の形態5では振動板45及び46をその後端部の裏面にて取付け部材1の表面に結合される構造とした点が相違する。その他の点は同じである。
なお、図9中、図1及び図2と同一符号は同一又は相当部分を示す。
振動板45及び46の厚さは取付け部材1の厚さの1/2未満である。振動板45及び46の先端部の裏面が超音波センサ2の放射面22の縁部で連結される。これにより、超音波センサ2の放射面22での振動が振動板45及び46に伝搬し、さらに取付け部材1へと伝搬されることになる。振動板45及び46の材料は、超音波が伝搬する材料であれば良く、取付け部材1と同じ樹脂または金属又は取付け部材1とは異なる樹脂であっても良い。
このように構成した実施の形態5にあっても実施の形態1と同様の効果を得ることができる。
このように構成した実施の形態5にあっても実施の形態1と同様の効果を得ることができる。
なお、本発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
1 取付け部材、11,12 貫通孔、2 超音波センサ、21 本体ケース、22 放射面、3,31 振動伝搬防止層、41~46 振動板。
Claims (13)
- 貫通孔を有する取付け部材、
側面と超音波を放射する放射面とを有し、この放射面が前記取付け部材の貫通孔から露出し、かつ、前記側面の全周と前記取付け部材の貫通孔の壁面との間に振動伝搬防止層を介し、前記取付け部材に固定される超音波センサ、
前記超音波センサの放射面の中心点を通り、前記放射面と平行な水平面における第1の直線とこの第1の直線と垂直に交わる第2の直線のいずれか一方の直線上に設けられ、前記超音波センサの放射面と前記取付け部材とを連結する振動板、
を備えた超音波センサ装置。 - 前記超音波センサは、表面に放射面を有する円筒状であることを特徴とする請求項1記載の超音波センサ装置。
- 前記超音波センサは、表面側の端部が前記取付け部材の貫通孔に挿入されていることを特徴とする請求項1記載の超音波センサ装置。
- 前記取付け部材の貫通孔は、平面形状が矩形であることを特徴とする請求項1記載の超音波センサ装置。
- 前記取付け部材の貫通孔は、平面形状が円形であることを特徴とする請求項1記載の超音波センサ装置。
- 前記振動伝搬防止層は、前記超音波センサの側面と前記取付け部材の貫通孔の壁面との間に形成される空隙であることを特徴とする請求項1記載の超音波センサ装置。
- 前記振動伝搬防止層は、前記超音波センサの側面と前記取付け部材の貫通孔の壁面との間に挿入された、前記振動板より超音波が伝搬しにくい樹脂材からなる層であることを特徴とする請求項1記載の超音波センサ装置。
- 前記振動板は前記取付け部材と一体に形成されていることを特徴とする請求項1記載の超音波センサ装置。
- 貫通孔を有する取付け部材、
側面と超音波を放射する放射面とを有し、この放射面が前記取付け部材の貫通孔から露出し、かつ、前記側面の全周と前記取付け部材の貫通孔の壁面との間に振動伝搬防止層を介し、前記取付け部材に固定される、圧電素子を用いた超音波センサ、
前記超音波センサの放射面の中心点を通り、前記放射面と平行な水平面における第1の直線とこの第1の直線と垂直に交わる第2の直線のいずれか一方の直線上に設けられ、前記超音波センサの放射面と前記取付け部材とを連結する振動板、
を備えた障害物検知装置。 - 前記超音波センサは、表面に放射面を有する円筒状であることを特徴とする請求項9記載の障害物検知装置。
- 前記超音波センサは、表面側の端部が前記取付け部材の貫通孔に挿入されていることを特徴とする請求項9記載の障害物検知装置。
- 前記振動伝搬防止層は、前記超音波センサの側面と前記取付け部材の貫通孔の壁面との間に形成される空隙であることを特徴とする請求項9記載の障害物検知装置。
- 前記振動伝搬防止層は、前記超音波センサの側面と前記取付け部材の貫通孔の壁面との間に挿入された樹脂材からなる層であることを特徴とする請求項9記載の障害物検知装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/018349 WO2018211589A1 (ja) | 2017-05-16 | 2017-05-16 | 超音波センサ装置及び障害物検知装置 |
| EP17909903.1A EP3617744A4 (en) | 2017-05-16 | 2017-05-16 | ULTRASONIC SENSOR DEVICE AND OBSTACLE DETECTION DEVICE |
| JP2019518634A JP6611992B2 (ja) | 2017-05-16 | 2017-05-16 | 超音波センサ装置及び障害物検知装置 |
| CN201780090571.0A CN110612458A (zh) | 2017-05-16 | 2017-05-16 | 超声波传感器装置以及障碍物检测装置 |
| US16/605,995 US20200142060A1 (en) | 2017-05-16 | 2017-05-16 | Ultrasonic sensor device and obstacle detection device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/018349 WO2018211589A1 (ja) | 2017-05-16 | 2017-05-16 | 超音波センサ装置及び障害物検知装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018211589A1 true WO2018211589A1 (ja) | 2018-11-22 |
Family
ID=64273472
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/018349 WO2018211589A1 (ja) | 2017-05-16 | 2017-05-16 | 超音波センサ装置及び障害物検知装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20200142060A1 (ja) |
| EP (1) | EP3617744A4 (ja) |
| JP (1) | JP6611992B2 (ja) |
| CN (1) | CN110612458A (ja) |
| WO (1) | WO2018211589A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020105167A1 (ja) * | 2018-11-22 | 2021-02-15 | 三菱電機株式会社 | 障害物検知装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4940291B1 (ja) * | 1970-05-12 | 1974-11-01 | ||
| JP3034685U (ja) * | 1996-08-12 | 1997-02-25 | 日本セラミック株式会社 | 超音波送受波器 |
| JP2001337172A (ja) * | 2000-05-29 | 2001-12-07 | Niles Parts Co Ltd | 超音波検知器 |
| JP2002058091A (ja) * | 2000-08-11 | 2002-02-22 | Nippon Soken Inc | 車両クリアランスソナー用超音波センサ |
| JP2002214328A (ja) * | 2001-01-12 | 2002-07-31 | Nec Tokin Ceramics Corp | 超音波センサー |
| JP2006345271A (ja) | 2005-06-09 | 2006-12-21 | Nippon Ceramic Co Ltd | 超音波送受波器 |
| JP2009065380A (ja) * | 2007-09-05 | 2009-03-26 | Mitsumi Electric Co Ltd | 超音波センサ |
| JP2016008923A (ja) * | 2014-06-25 | 2016-01-18 | トヨタ自動車株式会社 | センサ取付用リテーナ |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9612373D0 (en) * | 1996-06-13 | 1996-08-14 | Autosonics Ltd | Sensor mounting |
| DE19719519A1 (de) * | 1997-05-09 | 1998-11-12 | Bosch Gmbh Robert | Anordnung mit einem Modul zum Einbau in einen Stoßfänger eines Kraftfahrzeugs |
| WO2005104615A1 (ja) * | 2004-04-26 | 2005-11-03 | Murata Manufacturing Co., Ltd. | 超音波センサ |
| JP2007114182A (ja) * | 2005-09-22 | 2007-05-10 | Denso Corp | 超音波センサの取付け構造 |
| JP2007147319A (ja) * | 2005-11-24 | 2007-06-14 | Nippon Soken Inc | 障害物検知装置 |
| JP4742924B2 (ja) * | 2006-03-15 | 2011-08-10 | 株式会社デンソー | 超音波センサ |
| JP4893322B2 (ja) * | 2006-03-23 | 2012-03-07 | 株式会社デンソー | 超音波センサ |
| JP4497125B2 (ja) * | 2006-04-11 | 2010-07-07 | 株式会社デンソー | 衝突検出装置 |
| JP4860797B2 (ja) * | 2006-09-05 | 2012-01-25 | 株式会社日本自動車部品総合研究所 | 超音波センサ及び障害物検出装置 |
| DE102007039598B4 (de) * | 2006-09-05 | 2010-07-22 | DENSO CORPORATION, Kariya-shi | Ultraschallsensor und Hindernis-Detektorvorrichtung |
| KR101064922B1 (ko) * | 2006-10-20 | 2011-09-16 | 가부시키가이샤 무라타 세이사쿠쇼 | 초음파 센서 |
| CN101543095B (zh) * | 2006-11-27 | 2012-06-13 | 株式会社村田制作所 | 超声波转换器 |
| JP4544285B2 (ja) * | 2007-09-28 | 2010-09-15 | 株式会社デンソー | 超音波センサ |
| JP4458172B2 (ja) * | 2008-03-07 | 2010-04-28 | 株式会社デンソー | 超音波センサの取り付け構造 |
| JP2011039003A (ja) * | 2009-08-18 | 2011-02-24 | Panasonic Electric Works Co Ltd | 超音波センサ |
| US8794071B2 (en) * | 2010-01-21 | 2014-08-05 | Mitsubishi Electric Corporation | Ultrasonic wave sensor and method for attaching ultrasonic wave sensor |
| JP4941792B2 (ja) * | 2010-03-30 | 2012-05-30 | 株式会社デンソー | 車両用距離センサ及びその取付け構造 |
| DE102011105047B4 (de) * | 2011-06-20 | 2022-10-27 | Valeo Schalter Und Sensoren Gmbh | Anordnung mit einer Ultraschallsensorvorrichtung für ein Fahrzeug und einem Verkleidungsteil |
| DE102011105013A1 (de) * | 2011-06-20 | 2012-12-20 | Volkswagen Ag | Ultraschallsensorvorrichtung für ein Fahrzeug sowie Anordnung mit einer Ultraschallsensorvorrichtung |
| WO2013100142A1 (ja) * | 2011-12-28 | 2013-07-04 | パナソニック株式会社 | 超音波センサ |
| JP5849848B2 (ja) * | 2012-04-24 | 2016-02-03 | 株式会社デンソー | 車両用超音波センサ装置及び車両用超音波センサ装置の組み付け方法 |
| JP6245496B2 (ja) * | 2013-05-23 | 2017-12-13 | パナソニックIpマネジメント株式会社 | 超音波センサ装置及びその取付方法 |
| KR101553869B1 (ko) * | 2013-07-02 | 2015-09-17 | 현대모비스 주식회사 | 초음파 센서 조립체 |
| JP6412469B2 (ja) * | 2015-06-30 | 2018-10-24 | 株式会社デンソー | 運転支援装置及び運転支援方法 |
| JP6443322B2 (ja) * | 2015-12-25 | 2018-12-26 | 株式会社デンソー | 超音波センサ |
| JP6765069B2 (ja) * | 2016-03-15 | 2020-10-07 | パナソニックIpマネジメント株式会社 | 物体検知装置 |
-
2017
- 2017-05-16 US US16/605,995 patent/US20200142060A1/en not_active Abandoned
- 2017-05-16 WO PCT/JP2017/018349 patent/WO2018211589A1/ja unknown
- 2017-05-16 EP EP17909903.1A patent/EP3617744A4/en not_active Withdrawn
- 2017-05-16 CN CN201780090571.0A patent/CN110612458A/zh not_active Withdrawn
- 2017-05-16 JP JP2019518634A patent/JP6611992B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4940291B1 (ja) * | 1970-05-12 | 1974-11-01 | ||
| JP3034685U (ja) * | 1996-08-12 | 1997-02-25 | 日本セラミック株式会社 | 超音波送受波器 |
| JP2001337172A (ja) * | 2000-05-29 | 2001-12-07 | Niles Parts Co Ltd | 超音波検知器 |
| JP2002058091A (ja) * | 2000-08-11 | 2002-02-22 | Nippon Soken Inc | 車両クリアランスソナー用超音波センサ |
| JP2002214328A (ja) * | 2001-01-12 | 2002-07-31 | Nec Tokin Ceramics Corp | 超音波センサー |
| JP2006345271A (ja) | 2005-06-09 | 2006-12-21 | Nippon Ceramic Co Ltd | 超音波送受波器 |
| JP2009065380A (ja) * | 2007-09-05 | 2009-03-26 | Mitsumi Electric Co Ltd | 超音波センサ |
| JP2016008923A (ja) * | 2014-06-25 | 2016-01-18 | トヨタ自動車株式会社 | センサ取付用リテーナ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3617744A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020105167A1 (ja) * | 2018-11-22 | 2021-02-15 | 三菱電機株式会社 | 障害物検知装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200142060A1 (en) | 2020-05-07 |
| CN110612458A (zh) | 2019-12-24 |
| EP3617744A4 (en) | 2020-05-06 |
| JPWO2018211589A1 (ja) | 2019-11-07 |
| EP3617744A1 (en) | 2020-03-04 |
| JP6611992B2 (ja) | 2019-11-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8943893B2 (en) | Ultrasonic sensor | |
| US10067099B2 (en) | Method for controlling an ultrasonic sensor and ultrasonic sensor | |
| US8320218B2 (en) | Hidden ultrasonic transducer with beam angle control for non-contact target detection systems | |
| JP2001289939A (ja) | 超音波送受信装置及び車両周辺障害物検出装置 | |
| US7461555B2 (en) | Ultrasonic sensor | |
| JP2007243299A (ja) | 超音波センサ | |
| US7628076B2 (en) | Ultrasound sensor | |
| JP3552605B2 (ja) | 超音波振動子 | |
| US10151828B2 (en) | Sensor system | |
| US9763009B2 (en) | Electroacoustic transducer | |
| JP6611992B2 (ja) | 超音波センサ装置及び障害物検知装置 | |
| JP2016139871A (ja) | 超音波トランスデューサ | |
| JP5950742B2 (ja) | 超音波送受波器 | |
| JP2001013239A (ja) | 超音波振動子 | |
| JP4023061B2 (ja) | 超音波振動子 | |
| JP6667081B2 (ja) | 超音波デバイスとこれを用いた超音波センサ | |
| US8164981B2 (en) | Ultrasonic distance-measuring sensor with gap and partition between vibrating surfaces | |
| WO2017141402A1 (ja) | 超音波送受信装置、壁部材、および、壁部材への超音波センサの取付方法 | |
| JP3367446B2 (ja) | 防滴型超音波振動子 | |
| JP4768684B2 (ja) | 超音波センサ | |
| JP2019135809A (ja) | 超音波トランスデューサ | |
| TWI440831B (zh) | Ultrasonic sensor | |
| JP2022167544A (ja) | 超音波送受信器 | |
| US10832646B2 (en) | Sound transducer | |
| JP2016208423A (ja) | 超音波トランスデューサ、およびそれを用いた車両用センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17909903 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2019518634 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2017909903 Country of ref document: EP Effective date: 20191125 |