WO2018123199A1 - 周波数掃引発振回路 - Google Patents
周波数掃引発振回路 Download PDFInfo
- Publication number
- WO2018123199A1 WO2018123199A1 PCT/JP2017/036593 JP2017036593W WO2018123199A1 WO 2018123199 A1 WO2018123199 A1 WO 2018123199A1 JP 2017036593 W JP2017036593 W JP 2017036593W WO 2018123199 A1 WO2018123199 A1 WO 2018123199A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- frequency
- division ratio
- frequency division
- signal
- ratio
- Prior art date
Links
- 230000010355 oscillation Effects 0.000 title claims description 26
- 230000007423 decrease Effects 0.000 claims description 9
- 230000003247 decreasing effect Effects 0.000 claims description 5
- 238000005259 measurement Methods 0.000 description 12
- 230000001052 transient effect Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 5
- 230000002411 adverse Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000010408 sweeping Methods 0.000 description 2
- 239000013078 crystal Substances 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/28—Details of pulse systems
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/10—Details of the phase-locked loop for assuring initial synchronisation or for broadening the capture range
- H03L7/12—Details of the phase-locked loop for assuring initial synchronisation or for broadening the capture range using a scanning signal
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/16—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop
- H03L7/18—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop using a frequency divider or counter in the loop
- H03L7/197—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop using a frequency divider or counter in the loop a time difference being used for locking the loop, the counter counting between numbers which are variable in time or the frequency divider dividing by a factor variable in time, e.g. for obtaining fractional frequency division
Definitions
- the present invention relates to a frequency sweep oscillation circuit, and more particularly, to a frequency sweep oscillation circuit that is employed in various sensors that perform distance measurement using microwaves or millimeter waves and performs frequency sweep.
- the FMCW Frequency-Modulated-Continuous Wave
- pulse modulation method etc.
- a PLL Phase-phase PLL
- VCO voltage-controlled oscillator
- a frequency divider in a loop shape.
- Locked (Loop) synthesizers that change the output frequency by changing the frequency division ratio are known.
- the reference frequency fref
- the output frequency fvco
- the frequency division ratio N
- fvco fref ⁇ N
- the output frequency fvco changes in proportion to the frequency division ratio N (see Patent Document 1).
- the frequency sweep oscillation circuit for the distance measurement sensor for example, a frequency sweep (f1 ⁇ f2) in an up chirp period in which the output frequency fvco is linearly increased from the first frequency f1 to the second frequency f2.
- the frequency division ratio N is linearly returned from the second frequency division ratio N2 to the first frequency division ratio N1 during the blank period.
- an undershoot occurs in the output frequency fvco at the timing of switching from the blank period to the next up-chirp period.
- An object of the present invention is to alleviate the adverse effects of transient fluctuations that occur in the output frequency of a frequency sweep oscillation circuit.
- an input terminal to which a reference frequency signal is input, an output terminal connected to the output frequency signal, and an output frequency signal based on the phase comparison signal are output.
- Voltage controlled oscillator, frequency divider control circuit that outputs a divider control signal, output frequency signal is input, and the output frequency signal is divided by the division ratio specified by the divider control signal.
- a frequency divider control circuit comprising a frequency divider that outputs a frequency signal and a phase comparator that compares the phase of the reference frequency signal and the frequency signal and outputs a phase comparison signal.
- the divide ratio increases the division ratio from the first division ratio to the second division ratio that is larger than the first division ratio during the up-chirp period, and then changes the division ratio to the second division ratio during the blank period. From the divide ratio, it is greater than the first divide ratio and the second divide And it outputs the divider control signal back to the first frequency dividing ratio in terms of reduced to the third division ratio of less than. Moreover, the absolute value of the time change rate of the division ratio in the decrease of the division ratio from the third division ratio to the first division ratio in the blank period is calculated from the second division ratio in the blank period. Control is performed so as to be smaller than the absolute value of the time change rate of the frequency division ratio in the reduction of the frequency division ratio to the third frequency division ratio.
- a divider control circuit that outputs a divider control signal and an output frequency signal are input, and the output frequency signal is divided by a division ratio specified by the divider control signal and a divided frequency signal is output.
- the frequency divider control circuit has a down-chirp period in a frequency sweep oscillation circuit including a phase comparator that compares a phase of the reference frequency signal and the frequency-divided frequency signal and outputs a phase comparison signal.
- the frequency division ratio is changed from the second frequency division ratio to the second frequency division ratio in the blank period.
- a third smaller than the dividing ratio of 1 and larger than the second dividing ratio And it outputs the divider control as in terms of increased to division ratio back to the first division ratio.
- the time change rate of the frequency division ratio in the increase of the frequency division ratio from the third frequency division ratio to the first frequency division ratio in the blank period is the third frequency change ratio from the second frequency division ratio in the blank period. Control is performed so as to be smaller than the time change rate of the frequency division ratio in the increase of the frequency division ratio to the frequency division ratio.
- the frequency division ratio is decreased from the second frequency division ratio during the blank period to the third frequency division ratio, and the third frequency division ratio during the blank period is calculated from the third frequency division ratio. Comparing with the decrease ratio of the division ratio to the division ratio of 1, the latter section is less likely to cause transient fluctuation because the absolute value of the time change rate of the division ratio is smaller. Therefore, it becomes easy to ensure the linearity of the frequency sweep at the timing of switching from the blank period to the next up-chirp period without extending the blank period. Even if an undershoot occurs in the output frequency in the former section, it is possible to keep the fluctuation within a predetermined occupied frequency bandwidth.
- the frequency division ratio increasing section from the second frequency division ratio to the third frequency division ratio during the blank period and the third frequency division ratio during the blank period Comparing with the increase ratio of the frequency division ratio from 1 to the first frequency division ratio, the latter period is less likely to cause transient fluctuation because the time change rate of the frequency division ratio is smaller. Therefore, it becomes easy to ensure the linearity of the frequency sweep at the timing of switching from the blank period to the next down chirp period without extending the blank period. Even if an overshoot occurs in the output frequency in the former section, it is possible to keep the fluctuation within a predetermined occupied frequency bandwidth.
- FIG. 2 is a block diagram illustrating a detailed configuration example of a frequency divider control circuit in FIG. 1.
- FIG. 3A is a graph showing an ideal change over time of the output frequency fvco when the frequency sweep in the up-chirp period is used for the distance measuring sensor
- FIG. 3B is a graph using the frequency sweep oscillation circuit of FIG.
- FIG. 3C is a graph showing an example of the frequency division ratio control corresponding to FIG. 3A in the case of FIG. 3B
- FIG. 3C is a graph of the change with time of the output frequency fvco in the case of the frequency division ratio control of FIG.
- FIG. 4A is a graph showing an ideal time-dependent change of the output frequency fvco when the frequency sweep in the down chirp period is used for the distance measuring sensor
- FIG. 4B uses the frequency sweep oscillation circuit of FIG.
- FIG. 4C is a graph showing an example of the division ratio control corresponding to FIG. 4A in the case where the output frequency fvco is changed
- FIG. 4C is a graph of the actual change over time of the output frequency fvco in the case of the division ratio control of FIG.
- It is a graph which shows an example. 6 is a graph showing another example of the division ratio control corresponding to FIG. 3A when the frequency sweep oscillation circuit of FIG. 1 is used.
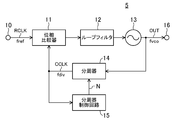
- FIG. 1 shows a configuration of a frequency sweep oscillation circuit for a distance measurement sensor according to an embodiment of the present invention.
- 1 includes an input terminal 10, a phase comparator 11, a loop filter 12, a voltage controlled oscillator (VCO) 13, a frequency divider 14, a frequency divider control circuit 15, and an output. And a terminal 16.
- a reference frequency signal RCLK having a constant reference frequency fref is input to the input terminal 10.
- the reference frequency signal RCLK can be supplied from a crystal oscillator, for example.
- the output terminal 16 is connected to an output frequency signal OUT having a variable output frequency fvco.
- the voltage controlled oscillator 13 outputs an output frequency signal OUT based on the phase comparison signal supplied from the phase comparator 11 via the loop filter 12.
- the frequency divider control circuit 15 outputs a frequency divider control signal that specifies the frequency division ratio N.
- the frequency divider 14 receives the output frequency signal OUT, divides the output frequency signal OUT by the frequency division ratio N specified by the frequency divider control signal, and generates the frequency division frequency signal CCLK having the frequency division frequency fdiv. Output.
- the phase comparator 11 compares the phases of the reference frequency signal RCLK and the divided frequency signal CCLK and outputs a phase comparison signal.
- the frequency divider control circuit 15 receives a frequency division frequency signal CCLK from the frequency divider 14 for timing control. However, the frequency divider control circuit 15 may receive the reference frequency signal RCLK instead of the frequency division frequency signal CCLK.
- fvco fref ⁇ N
- the output frequency fvco changes in proportion to the frequency division ratio N.
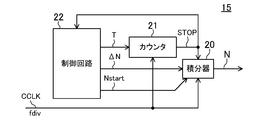
- FIG. 2 shows a detailed configuration example of the frequency divider control circuit 15 in FIG.
- the frequency divider control circuit 15 in FIG. 2 includes an integrator 20, a counter 21, and a control circuit 22.
- the control circuit 22 sends two signals that specify the initial value Nstart of the division ratio and the increment ⁇ N per clock to the integrator 20, and sets the length of the time T in which the increment ⁇ N should be adopted. Signals to be designated are supplied to the counter 21 respectively.
- a frequency divider control signal designating N is output.
- the frequency division ratio N increases with time. If the increment ⁇ N is a negative value, the frequency division ratio N decreases with time. If the increment ⁇ N is 0, The frequency division ratio N is held constant.
- the counter 21 counts the number of clocks of the divided frequency signal CCLK, and outputs the count end signal STOP when the count number corresponds to the set time T, that is, when the time T has elapsed.
- the control circuit 22 updates the three outputs Nstart, ⁇ N, and T.
- the integrator 20 receives the count end signal STOP, the integrator 20 is initialized to the next initial value Nstart.
- FIG. 3A is a graph showing an ideal change with time of the output frequency fvco when the frequency sweep in the up-chirp period is used for the distance measurement sensor.
- the period from time t1 to time t2 is an up chirp period (f1 ⁇ f2) in which the output frequency fvco is linearly increased from the first frequency f1 to the second frequency f2.
- the frequency sweep during this up-chirp period is used for distance measurement.
- the subsequent time t2 to time t4 is a blank period in which the output frequency fvco is returned from the second frequency f2 to the first frequency f1.
- the set of the up chirp period and the blank period is repeated.
- FIG. 3B is a graph showing an example of the division ratio control corresponding to FIG. 3A when the frequency sweep oscillation circuit 5 of FIG. 1 is used.
- the blank period from time t2 to time t4 is divided into a first section from time t2 to time t3 and a second section from time t3 to time t4.
- the frequency division ratio N is a straight line from the second frequency division ratio N2 to the third frequency division ratio N3 that is larger than the first frequency division ratio N1 and smaller than the second frequency division ratio N2. (N1 ⁇ N3 ⁇ N2). In the second section, the frequency division ratio N is linearly decreased from the third frequency division ratio N3 to the first frequency division ratio N1.
- the absolute value of the time change rate (gradient of the graph) of the division ratio N in the decrease of the division ratio N from the third division ratio N3 to the first division ratio N1 in the second section is In order to be smaller than the absolute value of the time change rate (gradient of the graph) of the division ratio N in the decrease of the division ratio N from the second division ratio N2 to the third division ratio N3 in one section. Be controlled.
- FIG. 3C is a graph showing an example of the actual change over time of the output frequency fvco in the case of the frequency division ratio control of FIG.
- the absolute value of the time change rate of the frequency division ratio N is large only in the first section. Therefore, according to FIG. 3C, at the timing of switching from the first section to the second section. Undershoot occurs in the output frequency fvco.
- the fluctuation of the output frequency fvco due to undershoot is predetermined (from the first frequency f1 to the second frequency f2). It is possible to fit within the occupied frequency bandwidth. Further, it becomes easy to ensure the linearity of the frequency sweep at the timing of switching from the blank period to the next up-chirp period (time t4) without extending the blank period.
- FIG. 4A is a graph showing an ideal change with time of the output frequency fvco when the frequency sweep in the down chirp period is used for the distance measurement sensor.
- the period from time t1 to time t2 is a down chirp period (f1> f2) in which the output frequency fvco is linearly lowered from the first frequency f1 to the second frequency f2.
- the frequency sweep during this down chirp period is used for distance measurement.
- the subsequent time t2 to time t4 is a blank period in which the output frequency fvco is returned from the second frequency f2 to the first frequency f1.
- the set of the down chirp period and the blank period is repeated.
- FIG. 4B is a graph showing an example of the division ratio control corresponding to FIG. 4A when the frequency sweep oscillation circuit 5 of FIG. 1 is used.
- the blank period from time t2 to time t4 is divided into a first section from time t2 to time t3 and a second section from time t3 to time t4.
- the frequency division ratio N is a straight line from the second frequency division ratio N2 to a third frequency division ratio N3 that is smaller than the first frequency division ratio N1 and larger than the second frequency division ratio N2. (N1> N3> N2).
- the frequency division ratio N is linearly increased from the third frequency division ratio N3 to the first frequency division ratio N1.
- the time change rate (slope of the graph) of the division ratio N in the increase of the division ratio N from the third division ratio N3 to the first division ratio N1 in the second section is the first section.
- the frequency division ratio N is controlled to be smaller than the time change rate (gradient of the graph) in the increase of the frequency division ratio N from the second frequency division ratio N2 to the third frequency division ratio N3.
- FIG. 4 (c) is a graph showing an example of actual change over time of the output frequency fvco in the case of the frequency division ratio control of FIG. 4 (b). Since the time change rate of the frequency division ratio N in the blank period is large only in the first section, according to FIG. 4C, the output frequency fvco at the timing of switching from the first section to the second section. Overshoot occurs. However, by setting the third frequency division ratio N3 at the time t3 in anticipation of this transient phenomenon, the fluctuation of the output frequency fvco due to overshoot is predetermined (from the first frequency f1 to the second frequency f2). It is possible to fit within the occupied frequency bandwidth. Further, it becomes easy to ensure the linearity of the frequency sweep at the timing of switching from the blank period to the next down chirp period (time t4) without extending the blank period.
- FIG. 5 is a graph showing another example of the division ratio control corresponding to FIG. 3A when the frequency sweep oscillation circuit 5 of FIG. 1 is used.
- the frequency division ratio N is linearly increased from the first frequency division ratio N1 to the second frequency division ratio N2 (N1 ⁇ N2 ).
- the blank period from time t2 to time t5 is divided into a first section from time t2 to time t3, a second section from time t3 to time t4, and a third section from time t4 to time t5. It is done.
- the frequency division ratio N is a straight line from the second frequency division ratio N2 to the third frequency division ratio N3 that is larger than the first frequency division ratio N1 and smaller than the second frequency division ratio N2. (N1 ⁇ N3 ⁇ N2).
- the frequency division ratio N is a straight line from the third frequency division ratio N3 to the fourth frequency division ratio N4 that is larger than the first frequency division ratio N1 and smaller than the third frequency division ratio N3. (N1 ⁇ N4 ⁇ N3).
- the frequency division ratio N is linearly decreased from the fourth frequency division ratio N4 to the first frequency division ratio N1.
- the absolute value of the time change rate (gradient of the graph) of the frequency division ratio N in the decrease of the frequency division ratio N gradually increases from the first section to the second section and from the second section to the third section. It is controlled to be smaller. According to FIG. 5, since the smooth change of the frequency division ratio N in the blank period can be realized as compared with the case of FIG. 3B, the adverse effect of the transient fluctuation occurring in the output frequency fvco can be greatly reduced.
- the time change rate (gradient of the graph) of the frequency division ratio N in the second section from time t3 to time t4 may be zero.
- the absolute value of the time change rate (slope of the graph) of the division ratio N in the third section from time t4 to time t5 is the second section from time t3 to time t4 as long as the value falls below a predetermined value. Control may be performed so as to be larger than the absolute value of the time change rate (gradient of the graph) of the frequency division ratio N.
- the frequency division ratio control is executed by dividing the blank period into three or more sections as illustrated in FIG. It is also possible to do.
- the frequency sweep oscillation circuit according to the present invention has the effect of reducing the adverse effects of transient fluctuations occurring in the output frequency, and is useful as a frequency sweep oscillation circuit for distance measurement sensors and the like.
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
分周器制御回路(15)は、アップチャープ期間に分周比Nを第1の分周比から、第1の分周比よりも大きい第2の分周比へ増加させた後に、ブランク期間に分周比Nを第2の分周比から、第1の分周比よりも大きくかつ第2の分周比よりも小さい第3の分周比へ減少させたうえで第1の分周比へ戻すような分周器制御信号を分周器(14)へ出力する。しかも、ブランク期間での第3の分周比から第1の分周比への減少における分周比Nの時間変化率の絶対値は、ブランク期間での第2の分周比から第3の分周比への減少における分周比Nの時間変化率の絶対値よりも小さくなるように制御される。
Description
本発明は、周波数掃引発振回路に関し、特にマイクロ波やミリ波を用いて距離計測等を行う各種センサに採用されて周波数掃引を行う周波数掃引発振回路に関する。
マイクロ波やミリ波を用いて距離計測等を行う各種センサでは、FMCW(Frequency Modulated Continuous Wave)方式、パルス変調方式等が採用されている。
例えば距離計測センサ用の周波数掃引発振回路として、位相比較器と、ループフィルタと、電圧制御発振器(Voltage-Controlled Oscillator:VCO)と、分周器とをループ状に接続してなるPLL(Phase-Locked Loop)シンセサイザにて、分周比を変化させることで出力周波数を変化させるものが知られている。基準周波数をfrefとし、出力周波数をfvcoとし、分周比をNとすると、fvco=fref×Nとなり、分周比Nに比例して出力周波数fvcoが変化する(特許文献1参照)。
また、周波数掃引特性をグラフにより設定し、そのグラフに対応するデジタルデータから周波数掃引特性のシーケンスを作成する技術も知られている(特許文献2参照)。
PLLシンセサイザを用いた周波数掃引は、高い周波数確度にて掃引を行うことができる反面、掃引速度の高速化がフィードバック系の応答速度によって制限される。
具体的には、距離計測センサ用の周波数掃引発振回路において、例えば、出力周波数fvcoを第1の周波数f1から第2の周波数f2まで直線的に上げるアップチャープ期間の周波数掃引(f1<f2)を距離計測に利用した後、引き続く短いブランク期間にて出力周波数fvcoを第2の周波数f2から第1の周波数f1へ戻すことを想定する。これに対応する従来の分周比制御によれば、アップチャープ期間に分周比Nを第1の分周比N1(=f1/fref)から第2の分周比N2(=f2/fref)へ直線的に増加させた後、ブランク期間に分周比Nを第2の分周比N2から第1の分周比N1へ直線的に戻す。ところが、ブランク期間から次のアップチャープ期間への切り替わりのタイミングで、出力周波数fvcoにアンダーシュートが発生することが避けられなかった。
このように出力周波数fvcoにアンダーシュートが発生すると、周波数掃引の線形性に関する要求仕様や、占有周波数帯域幅の制約を満たせない。そうかと言ってブランク期間を延長すれば、周波数掃引発振回路の利用効率が低下する。
本発明の目的は、周波数掃引発振回路の出力周波数に生じる過渡変動の悪影響を緩和することにある。
上記目的を達成するため、本発明の第1の観点によれば、基準周波数信号が入力される入力端子と、出力周波数信号に接続された出力端子と、位相比較信号に基づき出力周波数信号を出力する電圧制御発振器と、分周器制御信号を出力する分周器制御回路と、出力周波数信号が入力され、分周器制御信号で指定される分周比で出力周波数信号を分周して分周周波数信号を出力する分周器と、基準周波数信号と分周周波数信号との位相を比較し、位相比較信号を出力する位相比較器とを備えた周波数掃引発振回路において、分周器制御回路は、アップチャープ期間に分周比を第1の分周比から、第1の分周比よりも大きい第2の分周比へ増加させた後に、ブランク期間に分周比を第2の分周比から、第1の分周比よりも大きくかつ第2の分周比よりも小さい第3の分周比へ減少させたうえで第1の分周比へ戻すような分周器制御信号を出力する。しかも、ブランク期間での第3の分周比から第1の分周比への分周比の減少における分周比の時間変化率の絶対値は、ブランク期間での第2の分周比から第3の分周比への分周比の減少における分周比の時間変化率の絶対値よりも小さくなるように制御される。
また、本発明の第2の観点によれば、基準周波数信号が入力される入力端子と、出力周波数信号に接続された出力端子と、位相比較信号に基づき出力周波数信号を出力する電圧制御発振器と、分周器制御信号を出力する分周器制御回路と、出力周波数信号が入力され、分周器制御信号で指定される分周比で出力周波数信号を分周して分周周波数信号を出力する分周器と、基準周波数信号と分周周波数信号との位相を比較し、位相比較信号を出力する位相比較器とを備えた周波数掃引発振回路において、分周器制御回路は、ダウンチャープ期間に分周比を第1の分周比から、第1の分周比よりも小さい第2の分周比へ減少させた後に、ブランク期間に分周比を第2の分周比から、第1の分周比よりも小さくかつ第2の分周比よりも大きい第3の分周比へ増加させたうえで第1の分周比へ戻すような分周器制御信号を出力する。しかも、ブランク期間での第3の分周比から第1の分周比への分周比の増加における分周比の時間変化率は、ブランク期間での第2の分周比から第3の分周比への分周比の増加における分周比の時間変化率よりも小さくなるように制御される。
本発明の第1の観点によれば、ブランク期間中の第2の分周比から第3の分周比への分周比の減少区間と、ブランク期間中の第3の分周比から第1の分周比への分周比の減少区間とを比較すると、後者の区間の方が、分周比の時間変化率の絶対値が小さいので、過渡変動が生じにくい。よって、ブランク期間を延長せずとも、ブランク期間から次のアップチャープ期間への切り替わりのタイミングでの周波数掃引の線形性確保が容易になる。また、前者の区間にて出力周波数にアンダーシュートが発生しても、その変動を所定の占有周波数帯域幅の中に収めることが可能である。
また、本発明の第2の観点によれば、ブランク期間中の第2の分周比から第3の分周比への分周比の増加区間と、ブランク期間中の第3の分周比から第1の分周比への分周比の増加区間とを比較すると、後者の区間の方が、分周比の時間変化率が小さいので、過渡変動が生じにくい。よって、ブランク期間を延長せずとも、ブランク期間から次のダウンチャープ期間への切り替わりのタイミングでの周波数掃引の線形性確保が容易になる。また、前者の区間にて出力周波数にオーバーシュートが発生しても、その変動を所定の占有周波数帯域幅の中に収めることが可能である。
以上のように、本発明によれば、周波数掃引発振回路の出力周波数に生じる過渡変動の悪影響を緩和することができる。
以下、本発明の実施形態を図面に基づいて詳細に説明する。
図1は、本発明の実施形態に係る距離計測センサ用の周波数掃引発振回路の構成を示している。図1の周波数掃引発振回路5は、入力端子10と、位相比較器11と、ループフィルタ12と、電圧制御発振器(VCO)13と、分周器14と、分周器制御回路15と、出力端子16とを備えている。入力端子10には、一定の基準周波数frefを有する基準周波数信号RCLKが入力される。基準周波数信号RCLKは、例えば水晶発振器から供給を受けることができる。出力端子16は、可変の出力周波数fvcoを有する出力周波数信号OUTに接続されている。電圧制御発振器13は、位相比較器11からループフィルタ12を経由して供給された位相比較信号に基づき、出力周波数信号OUTを出力する。分周器制御回路15は、分周比Nを指定する分周器制御信号を出力する。分周器14は、出力周波数信号OUTが入力され、分周器制御信号で指定された分周比Nで出力周波数信号OUTを分周して、分周周波数fdivを有する分周周波数信号CCLKを出力する。位相比較器11は、基準周波数信号RCLKと分周周波数信号CCLKとの位相を比較し、位相比較信号を出力する。分周器制御回路15は、タイミング制御のために分周器14から分周周波数信号CCLKの入力を受ける。ただし、分周器制御回路15は、分周周波数信号CCLKに代えて基準周波数信号RCLKを入力してもよい。
図1の周波数掃引発振回路5によれば、fvco=fref×Nとなり、分周比Nに比例して出力周波数fvcoが変化する。
図2は、図1中の分周器制御回路15の詳細構成例を示している。図2の分周器制御回路15は、積分器20と、カウンタ21と、制御回路22とを備えている。制御回路22は、分周比の初期値Nstartと、1クロック当たりの分周比の増分ΔNとを指定する2つの信号を積分器20へ、当該増分ΔNを採用すべき時間Tの長さを指定する信号をカウンタ21へそれぞれ供給する。積分器20は、初期値Nstartが設定された後、分周周波数信号CCLKの1クロック毎に増分ΔNを加算していくことで、初期値Nstartから時間の経過とともに増分ΔNずつ変化する分周比Nを指定する分周器制御信号を出力する。ここで、増分ΔNが正の値であれば分周比Nが時間経過とともに増加し、増分ΔNが負の値であれば分周比Nが時間経過とともに減少し、増分ΔNが0であれば分周比Nが一定値を保持することになる。一方、カウンタ21は、分周周波数信号CCLKのクロック数をカウントし、設定された時間Tに相当するカウント数になれば、すなわち時間Tが経過した時点でカウント終了信号STOPを出力する。制御回路22は、カウント終了信号STOPを受けると、3つの出力Nstart,ΔN,Tを更新する。一方、積分器20は、カウント終了信号STOPを受けると、次の初期値Nstartに初期化される。
図3(a)は、アップチャープ期間の周波数掃引を距離計測センサに利用する場合の出力周波数fvcoの理想的経時変化を示すグラフである。図3(a)によれば、時刻t1から時刻t2までが、出力周波数fvcoを第1の周波数f1から第2の周波数f2まで直線的に上げるアップチャープ期間(f1<f2)である。このアップチャープ期間の周波数掃引が距離計測に利用される。引き続く時刻t2から時刻t4までが、出力周波数fvcoを第2の周波数f2から第1の周波数f1へ戻すブランク期間である。ここに、t2-t1>t4-t2である。これらアップチャープ期間とブランク期間との組が繰り返される。
図3(b)は、図1の周波数掃引発振回路5を用いた場合の図3(a)に対応した分周比制御の例を示すグラフである。図3(b)によれば、時刻t1から時刻t2までのアップチャープ期間に、分周比Nは、第1の分周比N1(=f1/fref)から第2の分周比N2(=f2/fref)へ直線的に増加させられる(N1<N2)。一方、時刻t2から時刻t4までのブランク期間は、時刻t2から時刻t3までの第1区間と、時刻t3から時刻t4までの第2区間とに分けられる。第1区間では、分周比Nは、第2の分周比N2から、第1の分周比N1よりも大きくかつ第2の分周比N2よりも小さい第3の分周比N3へ直線的に減少させられる(N1<N3<N2)。そして、第2区間では、分周比Nは、第3の分周比N3から第1の分周比N1へ直線的に減少させられる。しかも、第2区間での第3の分周比N3から第1の分周比N1への分周比Nの減少における分周比Nの時間変化率(グラフの傾き)の絶対値は、第1区間での第2の分周比N2から第3の分周比N3への分周比Nの減少における分周比Nの時間変化率(グラフの傾き)の絶対値よりも小さくなるように制御される。
図3(c)は、図3(b)の分周比制御の場合の出力周波数fvcoの実経時変化の例を示すグラフである。ブランク期間にて分周比Nの時間変化率の絶対値が大きいのは第1区間のみであるため、図3(c)によれば、第1区間から第2区間への切り替わりのタイミングにて出力周波数fvcoにアンダーシュートが発生する。しかしながら、この過渡現象を見越して時刻t3における第3の分周比N3を設定することにより、アンダーシュートによる出力周波数fvcoの変動を所定の(第1の周波数f1から第2の周波数f2までの)占有周波数帯域幅の中に収めることが可能である。また、ブランク期間を延長せずとも、ブランク期間から次のアップチャープ期間への切り替わりのタイミング(時刻t4)での周波数掃引の線形性確保が容易になる。
図4(a)は、ダウンチャープ期間の周波数掃引を距離計測センサに利用する場合の出力周波数fvcoの理想的経時変化を示すグラフである。図4(a)によれば、時刻t1から時刻t2までが、出力周波数fvcoを第1の周波数f1から第2の周波数f2まで直線的に下げるダウンチャープ期間(f1>f2)である。このダウンチャープ期間の周波数掃引が距離計測に利用される。引き続く時刻t2から時刻t4までが、出力周波数fvcoを第2の周波数f2から第1の周波数f1へ戻すブランク期間である。ここに、t2-t1>t4-t2である。これらダウンチャープ期間とブランク期間との組が繰り返される。
図4(b)は、図1の周波数掃引発振回路5を用いた場合の図4(a)に対応した分周比制御の例を示すグラフである。図4(b)によれば、時刻t1から時刻t2までのダウンチャープ期間に、分周比Nは、第1の分周比N1(=f1/fref)から第2の分周比N2(=f2/fref)へ直線的に減少させられる(N1>N2)。一方、時刻t2から時刻t4までのブランク期間は、時刻t2から時刻t3までの第1区間と、時刻t3から時刻t4までの第2区間とに分けられる。第1区間では、分周比Nは、第2の分周比N2から、第1の分周比N1よりも小さくかつ第2の分周比N2よりも大きい第3の分周比N3へ直線的に増加させられる(N1>N3>N2)。そして、第2区間では、分周比Nは、第3の分周比N3から第1の分周比N1へ直線的に増加させられる。しかも、第2区間での第3の分周比N3から第1の分周比N1への分周比Nの増加における分周比Nの時間変化率(グラフの傾き)は、第1区間での第2の分周比N2から第3の分周比N3への分周比Nの増加における分周比Nの時間変化率(グラフの傾き)よりも小さくなるように制御される。
図4(c)は、図4(b)の分周比制御の場合の出力周波数fvcoの実経時変化の例を示すグラフである。ブランク期間にて分周比Nの時間変化率が大きいのは第1区間のみであるため、図4(c)によれば、第1区間から第2区間への切り替わりのタイミングにて出力周波数fvcoにオーバーシュートが発生する。しかしながら、この過渡現象を見越して時刻t3における第3の分周比N3を設定することにより、オーバーシュートによる出力周波数fvcoの変動を所定の(第1の周波数f1から第2の周波数f2までの)占有周波数帯域幅の中に収めることが可能である。また、ブランク期間を延長せずとも、ブランク期間から次のダウンチャープ期間への切り替わりのタイミング(時刻t4)での周波数掃引の線形性確保が容易になる。
図5は、図1の周波数掃引発振回路5を用いた場合の図3(a)に対応した分周比制御の他の例を示すグラフである。図5によれば、時刻t1から時刻t2までのアップチャープ期間に、分周比Nは、第1の分周比N1から第2の分周比N2へ直線的に増加させられる(N1<N2)。一方、時刻t2から時刻t5までのブランク期間は、時刻t2から時刻t3までの第1区間と、時刻t3から時刻t4までの第2区間と、時刻t4から時刻t5までの第3区間とに分けられる。第1区間では、分周比Nは、第2の分周比N2から、第1の分周比N1よりも大きくかつ第2の分周比N2よりも小さい第3の分周比N3へ直線的に減少させられる(N1<N3<N2)。第2区間では、分周比Nは、第3の分周比N3から、第1の分周比N1よりも大きくかつ第3の分周比N3よりも小さい第4の分周比N4へ直線的に減少させられる(N1<N4<N3)。そして、第3区間では、分周比Nは、第4の分周比N4から第1の分周比N1へ直線的に減少させられる。しかも、第1区間から第2区間へ、そして第2区間から第3区間へと進むにつれて、分周比Nの減少における分周比Nの時間変化率(グラフの傾き)の絶対値が徐々に小さくなるように制御される。図5によれば、図3(b)の場合よりもブランク期間における分周比Nのなめらかな変化が実現できるので、出力周波数fvcoに生じる過渡変動の悪影響を大幅に緩和することができる。
なお、図5の例において、時刻t3から時刻t4までの第2区間における分周比Nの時間変化率(グラフの傾き)は0であってもよい。また、時刻t4から時刻t5までの第3区間における分周比Nの時間変化率(グラフの傾き)の絶対値は、その値が所定値を下回る限り、時刻t3から時刻t4までの第2区間における分周比Nの時間変化率(グラフの傾き)の絶対値よりも大きくなるように制御してもよい。
また、アップチャープ期間とダウンチャープ期間とのいずれの周波数掃引を距離計測センサに利用するかを問わず、図5に例示するようにブランク期間を3以上の区間に分割した分周比制御を実行することも可能である。
以上説明してきたとおり、本発明に係る周波数掃引発振回路は、出力周波数に生じる過渡変動の悪影響を緩和することができる効果を有し、距離計測センサ用の周波数掃引発振回路等として有用である。
5 周波数掃引発振回路
10 入力端子
11 位相比較器
12 ループフィルタ
13 電圧制御発振器(VCO)
14 分周器
15 分周器制御回路
16 出力端子
20 積分器
21 カウンタ
22 制御回路
10 入力端子
11 位相比較器
12 ループフィルタ
13 電圧制御発振器(VCO)
14 分周器
15 分周器制御回路
16 出力端子
20 積分器
21 カウンタ
22 制御回路
Claims (3)
- 基準周波数信号が入力される入力端子と、
出力周波数信号に接続された出力端子と、
位相比較信号に基づき前記出力周波数信号を出力する電圧制御発振器と、
分周器制御信号を出力する分周器制御回路と、
前記出力周波数信号が入力され、前記分周器制御信号で指定される分周比で前記出力周波数信号を分周して分周周波数信号を出力する分周器と、
前記基準周波数信号と前記分周周波数信号との位相を比較し、前記位相比較信号を出力する位相比較器とを備えた周波数掃引発振回路であって、
前記分周器制御回路は、アップチャープ期間に前記分周比を第1の分周比から、前記第1の分周比よりも大きい第2の分周比へ増加させた後に、ブランク期間に前記分周比を前記第2の分周比から、前記第1の分周比よりも大きくかつ前記第2の分周比よりも小さい第3の分周比へ減少させたうえで前記第1の分周比へ戻すような前記分周器制御信号を出力し、
前記ブランク期間での前記第3の分周比から前記第1の分周比への前記分周比の減少における前記分周比の時間変化率の絶対値は、前記ブランク期間での前記第2の分周比から前記第3の分周比への前記分周比の減少における前記分周比の時間変化率の絶対値よりも小さくなるように制御される周波数掃引発振回路。 - 基準周波数信号が入力される入力端子と、
出力周波数信号に接続された出力端子と、
位相比較信号に基づき前記出力周波数信号を出力する電圧制御発振器と、
分周器制御信号を出力する分周器制御回路と、
前記出力周波数信号が入力され、前記分周器制御信号で指定される分周比で前記出力周波数信号を分周して分周周波数信号を出力する分周器と、
前記基準周波数信号と前記分周周波数信号との位相を比較し、前記位相比較信号を出力する位相比較器とを備えた周波数掃引発振回路であって、
前記分周器制御回路は、ダウンチャープ期間に前記分周比を第1の分周比から、前記第1の分周比よりも小さい第2の分周比へ減少させた後に、ブランク期間に前記分周比を前記第2の分周比から、前記第1の分周比よりも小さくかつ前記第2の分周比よりも大きい第3の分周比へ増加させたうえで前記第1の分周比へ戻すような前記分周器制御信号を出力し、
前記ブランク期間での前記第3の分周比から前記第1の分周比への前記分周比の増加における前記分周比の時間変化率は、前記ブランク期間での前記第2の分周比から前記第3の分周比への前記分周比の増加における前記分周比の時間変化率よりも小さくなるように制御される周波数掃引発振回路。 - 請求項1又は2に記載の周波数掃引発振回路を備えた距離計測センサ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016250725 | 2016-12-26 | ||
| JP2016-250725 | 2016-12-26 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018123199A1 true WO2018123199A1 (ja) | 2018-07-05 |
Family
ID=62710276
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/036593 WO2018123199A1 (ja) | 2016-12-26 | 2017-10-10 | 周波数掃引発振回路 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2018123199A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011197011A (ja) * | 2000-08-16 | 2011-10-06 | Valeo Radar Systems Inc | 自動車用レーダ・システムおよび方法 |
| JP2012018078A (ja) * | 2010-07-08 | 2012-01-26 | Alouette Technology Inc | チャープ信号生成回路、fmcw方式合成開口レーダ、アンテナ装置及び飛翔体 |
| US20170241825A1 (en) * | 2016-02-22 | 2017-08-24 | Vega Grieshaber Kg | Reduction of power peaks in the spectrum of the mean power of fill level measuring devices |
-
2017
- 2017-10-10 WO PCT/JP2017/036593 patent/WO2018123199A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011197011A (ja) * | 2000-08-16 | 2011-10-06 | Valeo Radar Systems Inc | 自動車用レーダ・システムおよび方法 |
| JP2012018078A (ja) * | 2010-07-08 | 2012-01-26 | Alouette Technology Inc | チャープ信号生成回路、fmcw方式合成開口レーダ、アンテナ装置及び飛翔体 |
| US20170241825A1 (en) * | 2016-02-22 | 2017-08-24 | Vega Grieshaber Kg | Reduction of power peaks in the spectrum of the mean power of fill level measuring devices |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111869106B (zh) | 时间数字转换器、延迟测量方法和数字锁相环 | |
| US7724097B2 (en) | Direct digital synthesizer for reference frequency generation | |
| US7907023B2 (en) | Phase lock loop with a multiphase oscillator | |
| US7605666B2 (en) | High frequency digital oscillator-on-demand with synchronization | |
| CN106708166B (zh) | 信号生成器和信号生成方法 | |
| KR100824791B1 (ko) | 클록 체배기 및 클록 체배 방법 | |
| US11342926B2 (en) | Synchronization of clock signals generated using output dividers | |
| US7956696B2 (en) | Techniques for generating fractional clock signals | |
| US6943598B2 (en) | Reduced-size integrated phase-locked loop | |
| CN107528567B (zh) | 注入锁定振荡器及包括其的半导体器件 | |
| US11342925B2 (en) | Signal generation circuit and method, and digit-to-time conversion circuit and method | |
| US9602115B1 (en) | Method and apparatus for multi-rate clock generation | |
| US10018970B2 (en) | Time-to-digital system and associated frequency synthesizer | |
| US20220052703A1 (en) | Signal generation circuit and method, and digit-to-time conversion circuit and method | |
| US9966963B2 (en) | Frequency synthesizer | |
| US7439812B1 (en) | Auto-ranging phase-locked loop | |
| EP4175180A1 (en) | Circuitry and methods for fractional division of high-frequency clock signals | |
| WO2018123199A1 (ja) | 周波数掃引発振回路 | |
| US20040027181A1 (en) | Clock multiplying PLL circuit | |
| KR20070055011A (ko) | 전압 제어 발진기의 주파수 대역을 안정적으로 조정하는위상 동기 루프 및 방법 | |
| KR100665006B1 (ko) | 위상 동기 루프 장치 | |
| US7276982B1 (en) | High frequency digital oscillator-on-demand with synchronization | |
| JP2015103895A (ja) | スペクトラム拡散クロック発生回路 | |
| KR101548256B1 (ko) | 인젝션 락킹 기반 링오실레이터의 피브이티 변화 교정을 위한 장치 및 방법 | |
| US11846720B2 (en) | Frequency sweep circuit and radar device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17888114 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17888114 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |