WO2018088146A1 - Système d'aide pour des opérations, procédé d'aide pour des opérations, et programme d'aide pour des opérations - Google Patents
Système d'aide pour des opérations, procédé d'aide pour des opérations, et programme d'aide pour des opérations Download PDFInfo
- Publication number
- WO2018088146A1 WO2018088146A1 PCT/JP2017/037635 JP2017037635W WO2018088146A1 WO 2018088146 A1 WO2018088146 A1 WO 2018088146A1 JP 2017037635 W JP2017037635 W JP 2017037635W WO 2018088146 A1 WO2018088146 A1 WO 2018088146A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- marker
- operation unit
- implant
- dimensional model
- image
- Prior art date
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C19/00—Dental auxiliary appliances
- A61C19/04—Measuring instruments specially adapted for dentistry
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C8/00—Means to be fixed to the jaw-bone for consolidating natural teeth or for fixing dental prostheses thereon; Dental implants; Implanting tools
Definitions
- a three-dimensional model of a drill or an implant attached to the distal end portion of the operation unit in a direction perpendicular to the longitudinal direction of the operation unit and used in the operation is generated.
- the three-dimensional model of the CT image and the three-dimensional model of the virtual implant are displayed, the three-dimensional model of the drill or the implant is superimposed and displayed according to the movement of the operation unit and the subject. Therefore, it is possible to perform intuitive and real-time operation using visual information.
- the treatment support system includes a support portion having a predetermined length from a position where the reference marker is fixed at a position of any one tooth of the patient, and the support marker is connected to the support portion. It has a marker part arrange
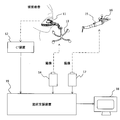
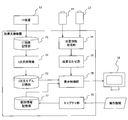
- the second position marker 16 that is an infrared marker for identification
- the second imaging unit 17 that images the second marker 16 with infrared rays
- the first imaging unit 14 and the second imaging unit 17.
- the treatment components such as at least the tip portion and the drill of the operating section 15, and a practitioner support apparatus 19 to be displayed on the display 18 in a three-dimensional model.
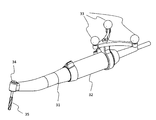
- FIG. 2 and 3 are first and second diagrams showing the structures of the reference marker 11 and the first position marker 13.
- FIG. 2 shows a structure in which the reference marker 11 and the first position marker 13 are connected and integrated with the fixing portion 21 fixed to the teeth of the user.
- FIG. 3 when actually used, at the time of CT imaging, the first position marker 13 is used in the excluded state (FIG. 3A), and at the time of design and operation, It is used in a state where the reference marker 11 is excluded (FIG. 3B).
- the marker portion 23 When the imaging of the CT image is completed, the marker portion 23 is unnecessary and is removed.
- the marker portion 23 may be detachably disposed on the support portion 22 or may be bent and removed after the CT scan. And if the marker part 23 is excluded, the 1st position marker 13 will be mounted
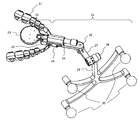
- the first position marker 13 includes a first support part 25 connected to the connection part 24, a first hinge part 26 having a yaw axis as a rotation axis with respect to the first support part 25, and the first hinge part 26.
- three or more markers are arranged on the same plane on a non-linear line in order to specify a position on a three-dimensional coordinate.
- the movable parts in the first position marker 13 are only the first hinge part 26 and the second hinge part 28, and the positions are fixed so that other parts cannot be moved.
- the first hinge portion 26 and the second hinge portion 28 each display a memory indicating a rotation angle, and the positional relationship with the reference marker 11 is specified in advance and converted into data according to each memory. That is, by specifying the coordinates of the infrared marker 30, it is possible to easily convert to the coordinates on the CT image.
- FIG. 7 is a diagram showing a specific design method. As shown in FIG. 7A, the direction and angle of the handpiece 31 are adjusted in a state where the fixing portion 42 at the tip of the design component 40 is in contact with the teeth of the plaster model. The alignment processing described above is executed by the treatment support device 19 (the details of the treatment support device 19 will be described later), and a three-dimensional model as shown in FIG. Is displayed.
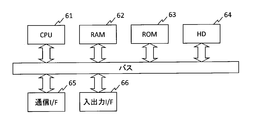
- FIG. 9 is a hardware configuration diagram of the treatment support apparatus.
- the treatment support device 19 can be realized by a general computer.
- the treatment support apparatus 19 includes a CPU 61, a RAM 62, a ROM 63, a hard disk (HD) 64, a communication I / F 65, and an input / output I / F 66.
- the ROM 63 and the HD 64 store an operating system, a program, three-dimensional model data, and the like.
- the program is read into the RAM 62 and executed by the CPU 61 as necessary.
- the communication I / F 65 is an interface for performing communication between apparatuses.
- the input / output I / F 66 is an interface for receiving input from an input device such as a touch panel, a keyboard, a mouse, and a camera, and outputting data to a printer, a display, or the like.
- the input / output I / F 66 can connect an external device or the like as necessary.
- Each processing unit is connected via a bus and exchanges information.
- the hardware configuration is merely an example, and can be changed as necessary.
- a three-dimensional model storage unit 73 for storing a three-dimensional modeled object displayed on the display 18, such as a CT image, a drill 35, a handpiece 31, and an artificial tooth root, and the first imaging unit 14
- the position information acquisition unit 74 for acquiring the position information of the first marker 13 and the position information of the second marker 16 imaged by the second imaging unit 17, the position information of the first marker 13, and the second information Based on the position information of the marker 16, the display unit 18 displays the CT image, the drill 35, the handpiece 31, the artificial tooth root, and the like based on the positioning unit 75 and the operation of the user.
- the CT image, the design component 40, the handpiece 31, and the three-dimensional model of the virtual artificial tooth root are aligned and displayed by the alignment unit 75 at the time of design.
- the capture unit 76 performs a capture process based on the operation of the user while adjusting the direction and angle and displaying the virtual artificial tooth root at the desired position and angle.
- the captured image is stored in the design information storage unit 77 as design information. When the design information is stored for all the implants, the design process is terminated.
- treatment support system according to the present embodiment can be applied in the same manner in treatment for actually implanting an artificial tooth root after cutting with the drill 35 is completed.
- the 3D modeling of the CT image is not necessarily performed by the treatment support apparatus 19, and the treatment support apparatus 19 may acquire information that is three-dimensionally modeled on the CT apparatus 12 side.
- the reference marker 11 is removed and the first position marker 13 is attached.
- the first imaging unit 14 images the first position marker 13 to acquire the position information
- the second imaging unit 17 images the second position marker 16 attached to the operation unit 15.
- the position information is acquired (S4).
- the alignment unit 75 aligns the tooth position in the CT image with the drill 35 and the artificial tooth root in the operation unit 15 (S5), and the display control unit 78 is aligned.
- the three-dimensional model is displayed on the display 18 (S6). Note that the processing so far is a common display processing at the time of design and treatment.
- processing at the time of design and processing at the time of treatment will be described.
- Design work is started with the aligned three-dimensional model displayed on the display 18.
- the appropriate position for embedding the artificial tooth root is searched for the gypsum model or the user by operating the handpiece 31.
- the display control unit 78 displays a three-dimensional model of the artificial tooth root so as to match the operation of the handpiece 31 (S7).
- the capture unit 76 acquires a captured image of the artificial tooth root by an operation from the user (S8).
- the acquired captured image is stored in the design information storage unit 77 as design information (S9).
- design information is captured for all treatment locations, the design process is terminated.
- the display mode is switched so that the three-dimensional model or the three-dimensional model of the artificial tooth root is displayed at the actual position of the drill 35 (the position of the tip of the handpiece 31) (S14).
- the treatment proceeds so that the artificial tooth root of the design information matches the drill 35 or the three-dimensional model of the artificial tooth root displayed on the tip of the handpiece 31 (S15). This completes the cutting or artificial tooth root embedding.
- design information can be created while intuitively grasping an appropriate position for implanting in real time in the design stage of dental implant treatment.
- the virtual drill or implant 3D model is deleted, and the actual drill or implant 3D model is aligned and displayed for switching.
- the patient can perform the implant operation accurately only by performing an operation of matching the drill or the three-dimensional model of the implant with the displayed design information.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dentistry (AREA)
- Epidemiology (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Dental Prosthetics (AREA)
- Dental Tools And Instruments Or Auxiliary Dental Instruments (AREA)
Abstract
La présente invention concerne un système d'aide pour des opérations permettant de percevoir, intuitivement et en temps réel, la position appropriée pour insérer un implant comportant : un dispositif CT (12) permettant de capturer une image conjointement avec un marqueur de référence (11) pour indiquer une position de référence d'une dent dans une image CT ; un premier marqueur de position (13), dont la position par rapport au marqueur de référence (11) est fixée ; un second marqueur de position (16) pour spécifier la position et la direction d'une partie de manipulation (15) ; une partie de stockage de modèle tridimensionnel (73) pour stocker des informations de modèle tridimensionnel sur la base de l'image CT et des informations de modèle tridimensionnel d'un implant virtuel monté dans la direction perpendiculaire à la direction longitudinale de la partie de manipulation (15) ; une partie de commande d'affichage (78) pour effectuer un alignement de position à partir des informations de position des trois marqueurs (11, 13, 16) et afficher les informations de modèle tridimensionnel selon le mouvement de la partie de manipulation (15) et d'un patient ; et une partie de capture (76) pour stocker la position et l'angle en tant qu'informations de conception lorsqu'un état se produit dans lequel le modèle tridimensionnel de l'implant virtuel est affiché à la position et à l'angle souhaités.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018550096A JP7018399B2 (ja) | 2016-11-08 | 2017-10-18 | 施術支援システム、施術支援方法及び施術支援プログラム |
| JP2022012739A JP7255927B2 (ja) | 2016-11-08 | 2022-01-31 | 施術支援システム、施術支援方法及び施術支援プログラム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016218000 | 2016-11-08 | ||
| JP2016-218000 | 2016-11-08 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018088146A1 true WO2018088146A1 (fr) | 2018-05-17 |
Family
ID=62109874
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/037635 WO2018088146A1 (fr) | 2016-11-08 | 2017-10-18 | Système d'aide pour des opérations, procédé d'aide pour des opérations, et programme d'aide pour des opérations |
Country Status (2)
| Country | Link |
|---|---|
| JP (2) | JP7018399B2 (fr) |
| WO (1) | WO2018088146A1 (fr) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020153410A1 (fr) * | 2019-01-22 | 2020-07-30 | ||
| WO2020152982A1 (fr) * | 2019-01-25 | 2020-07-30 | 株式会社Grin | Instrument de mesure dentaire, procédé de mesure, et instrument de fixation |
| WO2020195731A1 (fr) * | 2019-03-27 | 2020-10-01 | オムロン株式会社 | Système de notification et dispositif de notification |
| JP2020201354A (ja) * | 2019-06-07 | 2020-12-17 | 株式会社モリタ | マーカー取付け器具 |
| WO2021045062A1 (fr) | 2019-09-02 | 2021-03-11 | Safe Approach Medical株式会社 | Système de support thérapeutique et dispositif d'alignement |
| CN114431988A (zh) * | 2022-03-02 | 2022-05-06 | 福建医科大学附属口腔医院 | 用于口腔种植牙领域的动态导航系统及使用方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013236749A (ja) * | 2012-05-15 | 2013-11-28 | Denso Corp | 歯科インプラント手術支援装置 |
| US20140178832A1 (en) * | 2012-12-21 | 2014-06-26 | Anatomage Inc. | System and method for providing compact navigation-based surgical guide in dental implant surgery |
| JP2015519108A (ja) * | 2012-05-02 | 2015-07-09 | 医百科技股▲ふん▼有限公司 | 口腔内手術中の補助ガイド方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2460119A1 (fr) | 2004-03-04 | 2005-09-04 | Orthosoft Inc. | Interface graphique pour chirurgie assistee par ordinateur |
| JP5476036B2 (ja) * | 2009-04-30 | 2014-04-23 | 国立大学法人大阪大学 | 網膜投影型ヘッドマウントディスプレイ装置を用いた手術ナビゲーションシステムおよびシミュレーションイメージの重ね合わせ方法 |
| US20140309523A1 (en) * | 2013-04-16 | 2014-10-16 | Navigate Surgical Technologies, Inc. | Three-dimensional extraction tracking for implant modeling |
| CN107205795B (zh) * | 2014-12-09 | 2021-02-02 | 拜奥美特3i有限责任公司 | 用于牙外科手术的机器人装置 |
-
2017
- 2017-10-18 WO PCT/JP2017/037635 patent/WO2018088146A1/fr active Application Filing
- 2017-10-18 JP JP2018550096A patent/JP7018399B2/ja active Active
-
2022
- 2022-01-31 JP JP2022012739A patent/JP7255927B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015519108A (ja) * | 2012-05-02 | 2015-07-09 | 医百科技股▲ふん▼有限公司 | 口腔内手術中の補助ガイド方法 |
| JP2013236749A (ja) * | 2012-05-15 | 2013-11-28 | Denso Corp | 歯科インプラント手術支援装置 |
| US20140178832A1 (en) * | 2012-12-21 | 2014-06-26 | Anatomage Inc. | System and method for providing compact navigation-based surgical guide in dental implant surgery |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220008159A1 (en) * | 2019-01-22 | 2022-01-13 | Safe Approach Medical Inc. | Surgical procedure assistance system, treatment device, and plate |
| WO2020153410A1 (fr) | 2019-01-22 | 2020-07-30 | Safe Approach Medical株式会社 | Système d'assistance d'intervention chirurgicale, dispositif de traitement et plaque |
| JPWO2020153410A1 (fr) * | 2019-01-22 | 2020-07-30 | ||
| JP7414286B2 (ja) | 2019-01-22 | 2024-01-16 | Safe Approach Medical株式会社 | 施術支援システム及び処理装置 |
| EP3925568A4 (fr) * | 2019-01-22 | 2022-08-10 | Safe Approach Medical Inc. | Système d'assistance d'intervention chirurgicale, dispositif de traitement et plaque |
| WO2020152982A1 (fr) * | 2019-01-25 | 2020-07-30 | 株式会社Grin | Instrument de mesure dentaire, procédé de mesure, et instrument de fixation |
| WO2020195731A1 (fr) * | 2019-03-27 | 2020-10-01 | オムロン株式会社 | Système de notification et dispositif de notification |
| US11967183B2 (en) | 2019-03-27 | 2024-04-23 | Omron Corporation | Notification system and notification device |
| JP7339024B2 (ja) | 2019-06-07 | 2023-09-05 | 株式会社モリタ | マーカー取付け器具 |
| JP2020201354A (ja) * | 2019-06-07 | 2020-12-17 | 株式会社モリタ | マーカー取付け器具 |
| KR20220052951A (ko) | 2019-09-02 | 2022-04-28 | 세이프 어프로치 메디칼 인크. | 시술지원시스템 및 위치정합장치 |
| US20220183771A1 (en) * | 2019-09-02 | 2022-06-16 | Safe Approach Medical Inc. | Surgical procedure support system and registration apparatus |
| WO2021045062A1 (fr) | 2019-09-02 | 2021-03-11 | Safe Approach Medical株式会社 | Système de support thérapeutique et dispositif d'alignement |
| CN114431988A (zh) * | 2022-03-02 | 2022-05-06 | 福建医科大学附属口腔医院 | 用于口腔种植牙领域的动态导航系统及使用方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022050713A (ja) | 2022-03-30 |
| JPWO2018088146A1 (ja) | 2019-09-26 |
| JP7018399B2 (ja) | 2022-02-10 |
| JP7255927B2 (ja) | 2023-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7255927B2 (ja) | 施術支援システム、施術支援方法及び施術支援プログラム | |
| US20210177554A1 (en) | Robotic device for dental surgery | |
| CN107529968B (zh) | 用于观察口腔内部的装置 | |
| JP5523487B2 (ja) | インプラントのための穿孔補助手段を製造するための方法 | |
| KR102233745B1 (ko) | 치과 진료 실습 장치 및 치과 진료 실습 시스템 | |
| EP2785272B1 (fr) | Guide de préparation dentaire | |
| EP3673861B1 (fr) | Système d'implantation dentaire guidée | |
| US8954181B2 (en) | Systems, methods, apparatuses, and computer-readable storage media for designing and manufacturing custom dental preparation guides | |
| EP3013273B1 (fr) | Procédé et système de fabrication d'un modèle buccal à partir de données numériques tridimensionnelles (3d) | |
| US8849015B2 (en) | System and apparatus for haptically enabled three-dimensional scanning | |
| KR20170125360A (ko) | 가상의 환경에서 대응하는 가상의 대상을 조작하도록 물리적 대상을 이용하기 위한 방법 및 관련 장치와 컴퓨터 프로그램 제품 | |
| US9936166B2 (en) | Method for planning a dental treatment | |
| KR20210029196A (ko) | 증강 현실 유도 수술을 위한 방법 및 시스템 | |
| JP5322621B2 (ja) | ステント作製用口腔模型の製造装置およびステント作製用口腔模型の製造システム | |
| JP6801117B2 (ja) | モバイル連動インプラント診断システム | |
| US20100291505A1 (en) | Haptically Enabled Coterminous Production of Prosthetics and Patient Preparations in Medical and Dental Applications | |
| KR101170056B1 (ko) | 의료용 영상장비를 이용한 치아 보철기구 제조 방법 | |
| JP2020506033A (ja) | インプラント手術ガイド方法 | |
| JP2013236749A (ja) | 歯科インプラント手術支援装置 | |
| KR20050042043A (ko) | 의료용 시뮬레이션장치 및 의료용 시뮬레이션장치에있어서의 3차원화상의 표시제어방법 | |
| JP2003245289A (ja) | 歯科用インプラント施術支援装置 | |
| JP6847404B2 (ja) | 三次元計測方法及び三次元計測装置 | |
| WO2015154125A9 (fr) | Système de formation de guide d'implant dentaire | |
| JP2022050713A5 (fr) | ||
| JP6392470B1 (ja) | 取付位置確認部材、骨切断補助キット、及び位置検出プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17869705 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2018550096 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17869705 Country of ref document: EP Kind code of ref document: A1 |