WO2017042990A1 - 車両用表示装置及び車両用表示方法 - Google Patents
車両用表示装置及び車両用表示方法 Download PDFInfo
- Publication number
- WO2017042990A1 WO2017042990A1 PCT/JP2016/002550 JP2016002550W WO2017042990A1 WO 2017042990 A1 WO2017042990 A1 WO 2017042990A1 JP 2016002550 W JP2016002550 W JP 2016002550W WO 2017042990 A1 WO2017042990 A1 WO 2017042990A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- display
- image
- control unit
- unit
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 43
- 238000001514 detection method Methods 0.000 claims description 54
- 238000003384 imaging method Methods 0.000 claims description 22
- 230000003247 decreasing effect Effects 0.000 claims description 17
- 230000007423 decrease Effects 0.000 claims description 14
- 230000006870 function Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 5
- 230000001174 ascending effect Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000001629 suppression Effects 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/28—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with an adjustable field of view
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/12—Mirror assemblies combined with other articles, e.g. clocks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/26—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view to the rear of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
Definitions
- the present invention relates to a vehicle display device and a vehicle display method.
- Patent Document 1 determines the presence or absence of traffic jam information from navigation information such as speed information of a vehicle positioned ahead, and informs the user of the traffic jam information before the running vehicle is involved in the traffic jam.
- a vehicle information transmission system is disclosed.
- Patent Document 1 In the configuration of Patent Document 1 described above, a warning is given to the generated traffic jam, but it does not suppress the occurrence of the traffic jam by acting on the vehicle that causes the traffic jam.
- An object of the present invention is to provide a technique for making a driver aware that his / her vehicle becomes a cause of traffic jams in order to suppress the occurrence of traffic jams.
- the first aspect of the present embodiment includes a road gradient information acquisition unit that acquires gradient information of a road on which the host vehicle is traveling, a vehicle speed acquisition unit that acquires the vehicle speed of the host vehicle, and a preceding vehicle relative to the host vehicle. And an other vehicle detection unit that detects the following vehicle, an imaging unit that images the rear of the host vehicle, a display unit, and a display control unit that displays a rear image captured by the imaging unit on the display unit.
- the display control unit enlarges the rear normal display mode in which the image of the first region of the rear image is displayed on the display unit and the second region of the rear image smaller than the first region.
- the display control unit is configured to drive the host vehicle based on the gradient information acquired by the road gradient information acquisition unit.
- the speed of the vehicle decreases after the upward slope of the road increases
- the display device for a vehicle executes the rear enlarged display mode.
- the second aspect of the present embodiment includes a rear normal display mode in which an image of a first area of a rear image obtained by imaging the rear of the host vehicle is displayed on the display unit, and the first image of the rear image.
- a display method for a vehicle that selectively executes a rear enlarged display mode in which an image of a second region smaller than the region is enlarged and displayed on the display unit, and the road on which the host vehicle is traveling An increase in the slope of the road, a decrease in the vehicle speed after the increase in the slope of the road is detected, there is no preceding vehicle that forms a platoon with the vehicle, and the In the vehicle display method, the rearward enlarged display mode is executed when it is determined that there is a subsequent vehicle that does not form a platoon with the host vehicle.
- (First embodiment) It is a figure which shows typically the example ahead of the driver's seat in a vehicle.
- First embodiment It is a functional block diagram of a display device for vehicles.
- First embodiment It is a figure which represents typically the example of a back image.
- First embodiment It is a figure which shows typically the example of a display of the inner rear view mirror with a display function.
- First embodiment It is a figure which shows typically the example of a display of the inner rear view mirror with a display function.
- (First embodiment) It is a flowchart which shows operation
- First embodiment It is a flowchart which shows operation
- (Eighth embodiment) It is a figure which shows the example of another display typically. It is a functional block diagram of a display device for vehicles.
- (Ninth embodiment) It is a figure which shows typically the example of a display of the inner rear view mirror with a display function.
- (Ninth embodiment) It is a figure which shows typically the example of a display of the inner rear view mirror with a display function.
- (Ninth embodiment) It is a figure which shows typically the example of a display of the inner rear view mirror with a display function.
- (Ninth embodiment) It is a figure which shows typically the example of a display of the inner rear view mirror with a display function.
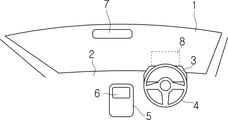
- FIG. 1 schematically shows an example in front of a driver seat in a vehicle.
- a windshield 1 in front of the driver's seat, a windshield 1, a dashboard 2, a cluster panel 3, a steering wheel 4, a center console panel 5, a navigation display 6, an inner rear view mirror 7 with a display function, a head-up display 8 is arranged.
- the head-up display 8 shown in FIG. 1 shows a projection range of a virtual image instead of the main body.
- At least one of the cluster panel 3, the navigation display 6, the inner rear view mirror 7 with a display function, and the head-up display 8 functions as a display unit.
- the inner rear view mirror 7 with a display function functions as a display unit.
- FIG. 2 is a functional block diagram of the vehicle display device 9. As shown in FIG. 2, the vehicular display device 9 includes a control unit 10, a camera 11, and a display unit 12.
- the camera 11 captures the back of the vehicle to generate image data, and outputs the generated image data to the control unit 10.
- the display unit 12 corresponds to the inner rear view mirror 7 with a display function in the present embodiment.
- the control unit 10 includes a CPU 13 (Central Processing Unit) as a central processing unit, a read / write free RAM 14 (Random Access Memory), and a read-only ROM 15 (Read Only Memory). Then, the CPU 13 reads out and executes the vehicle display program stored in the ROM 15, so that the vehicle display program detects the hardware such as the CPU 13, the road gradient information acquisition unit 16, the vehicle speed acquisition unit 17, and other vehicle detection. Unit 18, imaging control unit 19, and display control unit 20.
- CPU 13 Central Processing Unit
- a read / write free RAM 14 Random Access Memory
- ROM 15 Read Only Memory
- the road gradient information acquisition unit 16 acquires road gradient information of a road on which the host vehicle is traveling, for example, based on the output value of the inclination angle sensor 21 mounted on the vehicle.
- the road gradient information acquisition unit 16 replaces the acquisition of road gradient information using the output value of the inclination angle sensor 21 with map information, route information, WAN (Wide Area Network), etc. stored in advance in the navigation system.
- Road gradient information may be acquired using map information and route information received via wireless communication.
- the camera 11 constituting the imaging unit 24 includes a camera that images the front of the vehicle, and the road gradient information acquisition unit 16 images the front of the vehicle.
- Gradient information may be acquired by recognizing a sign indicating inclination information by image recognition processing of an image.
- the vehicle speed acquisition unit 17 acquires the vehicle speed of the host vehicle via the CAN 22 (Controller22Area Network), for example.
- the vehicle speed acquisition unit 17 may acquire the vehicle speed of the host vehicle using position information received by GPS (Global Positioning System) instead of acquiring the vehicle speed of the host vehicle via the CAN 22.
- GPS Global Positioning System
- the other vehicle detection unit 18 uses, for example, the millimeter wave radar 23 to detect the inter-vehicle distance between the own vehicle and the preceding vehicle and the inter-vehicle distance between the own vehicle and the following vehicle.
- the millimeter wave radar 23 it is possible to detect a preceding vehicle that is at most 150 m away from the own vehicle.
- the millimeter wave radar 23 it is possible to detect a succeeding vehicle that is 150 m away from the own vehicle.
- the other vehicle detection unit 18 detects the presence or absence of a preceding vehicle within a range of 150 m forward from the current position of the own vehicle.
- the other vehicle detection unit 18 detects the presence or absence of a following vehicle within a range of 150 m backward from the current position of the own vehicle. Instead of detecting the preceding vehicle and the following vehicle using the millimeter wave radar 23, the other vehicle detection unit 18 analyzes the image data generated by the camera that images the front and the rear, for example. You may make it detect a vehicle and a following vehicle.
- the imaging control unit 19 controls imaging by the camera 11.
- the camera 11 and the imaging control unit 19 constitute an imaging unit 24 that images the rear of the vehicle. That is, the imaging unit 24 images the back of the own vehicle.
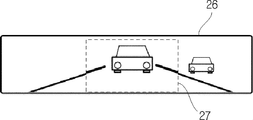
- a rear image 25 captured by the imaging unit 24 is illustrated in FIG.
- the first angle-of-view image 26 and the second angle-of-view image 27 shown in FIG. 3 are cut out with a cut-out shape that matches the shape of the display surface to be displayed. Moreover, it is also a cutout range corresponding to a rear normal display mode and a rear enlarged display mode which will be described later.
- the display control unit 20 displays the rear image 25 captured by the imaging unit 24 on the display unit 12. Specifically, the display control unit 20 can selectively execute the rear normal display mode and the rear enlarged display mode.
- the rear normal display mode is a display unit 12 (in the present embodiment, the inner rear view mirror 7 with a display function) that displays a first field-of-view image 26 as an image of the first region in the rear image 25. ).
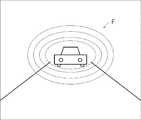
- the first angle-of-view image 26 displayed in the normal rear display mode is set to have the same angle of view as when viewed from the rear with a general inner rear view mirror using a mirror, and the inter-vehicle distance from the following vehicle F It is also an angle of view that can be properly grasped. As shown in FIG.
- the rear enlarged display mode is an enlargement of the second angle-of-view image 27 as the image of the second region in the rear image 25 to enlarge the display unit 12 (in this embodiment, the inner with display function).
- This is the mode displayed on the rear view mirror 7).
- the second area is an area inside the first area and is narrower than the first area. That is, the second field angle image 27 is an area inside the first field angle image 26 and is an image in a narrower range than the first field angle image 26. Therefore, the succeeding vehicle F reflected on the inner rear view mirror 7 with the display function in the rear enlarged display mode shown in FIG. 5 is more effective than the following vehicle F reflected on the inner rear view mirror 7 with the display function in the rear normal display mode shown in FIG. Magnified on the inner rear view mirror 7 with display function.
- the display control unit 20 determines, based on the road gradient information acquired by the road gradient information acquisition unit 16, whether the gradient of the road on which the vehicle is traveling has a gradient change that may cause traffic congestion (S310). ).
- the change in the gradient that can cause traffic congestion is a change in which the ascending slope of the road on which the vehicle is traveling has increased. It is a change that changes to an upward slope, and a change that makes the upward slope of the road on which the vehicle is running tighter.
- S310 when it is determined that there is no change in gradient that may cause traffic jam (S310: NO), the display control unit 20 executes or continues the rear normal display mode (S320), and ends the process. If it is determined in S310 that there has been a change in gradient that may cause traffic congestion (S310: YES), the display control unit 20 advances the process to S330.
- the display control unit 20 determines, based on the vehicle speed acquired by the other vehicle detection unit 18, whether the vehicle speed of the host vehicle has decreased after the above-described gradient change (S330).
- the vehicle's vehicle speed decreases is a decrease in the vehicle speed that is not noticed by the driver due to an increase in the gradient when the driver is driving at a constant speed. For example, it means a gradual decrease in vehicle speed of about 1 to 3 km / h per second.
- the display control unit 20 executes or continues the rear normal display mode (S320), End the process.
- the display control unit 20 advances the process to S340.
- the display control unit 20 determines whether there is a preceding vehicle that forms a platoon with the host vehicle based on the detection result of the other vehicle detection unit 18 (S340).
- the preceding vehicle that forms a platoon with the own vehicle means the preceding vehicle that is located within a range from the current position of the own vehicle to a position that is a predetermined distance away forward. Yes.
- the predetermined distance means a distance that allows the platoon to run in a traffic jam. For example, on a highway, the predetermined distance is about 20 m. On a general road, the predetermined distance is about 10 m.
- the display control unit 20 determines whether there is a succeeding vehicle that does not form a platoon with the own vehicle based on the detection result of the other vehicle detection unit 18 (S350).
- “there is a subsequent vehicle that does not form a platoon with the own vehicle” means that there is no subsequent vehicle in the range from the current position of the own vehicle to a position that is a predetermined distance away from the rear, In addition, it means that the succeeding vehicle is present at a position more than a predetermined distance backward from the current position of the own vehicle.
- the predetermined distance means a distance that allows the platoon to travel in a traffic jam. For example, on a highway, the predetermined distance is about 20 m.
- the predetermined distance is about 10 m.
- the display control unit 20 executes or continues the rear normal display mode (S320), End the process. Because if there is a succeeding vehicle in the range from the current position of the vehicle to a position away from the rear by a predetermined distance, a traffic jam has already occurred, and the vehicle is located at a position more than the predetermined distance backward from the current position of the vehicle. This is because if the following vehicle does not exist, the own vehicle is not a cause of traffic congestion.
- the display control unit 20 advances the process to S360.
- the display control unit 20 executes the rear enlarged display mode (S360).
- the display control unit 20 executes the rear enlarged display mode when the own vehicle is becoming a cause of the traffic jam, and executes the rear normal display mode in other cases.
- the inner rear view mirror 7 with a display function shows a larger size of the succeeding vehicle compared to when the normal rear display mode is executed.
- the occurrence of traffic congestion is suppressed by the user appropriately operating the accelerator.
- the first embodiment is characterized as follows.
- the vehicle display device 9 detects a road gradient acquisition unit 16 that acquires a gradient of a road on which the host vehicle is traveling, a vehicle speed acquisition unit 17 that acquires a vehicle speed of the host vehicle, and a preceding vehicle and a subsequent vehicle.
- the other vehicle detection part 18, the imaging part 24 which images the back of the own vehicle, the display part 12, and the display control part 20 which displays the back image which the imaging part 24 imaged on the display part 12 are provided.
- the display control unit 20 is smaller than the normal rear display mode in which the first field angle image 26 as the image of the first region of the rear image 25 is displayed on the display unit 12 and the first field angle image 26 of the rear image 25.
- a rear enlarged display mode in which the second field angle image 27 as the image of the second region is enlarged and displayed on the display unit 12 can be selectively executed.
- the display control unit 20 detects that the vehicle speed of the vehicle has decreased after the upward slope of the road on which the vehicle is traveling (S310: YES), and the formation of the vehicle between the vehicle and the vehicle (S330: YES). If it is determined that there is no preceding vehicle that constitutes the vehicle (S340: NO) and that there is a subsequent vehicle that does not form a platoon with the vehicle (S350: YES) Execute the enlarged display mode.
- the display unit 12 shows a larger size of the following vehicle compared to when the rear normal display mode is executed, and the driver is presented with the own vehicle. Can be noticed that is becoming a cause of traffic congestion. As a result, the occurrence of traffic congestion is suppressed by the user appropriately operating the accelerator.
- the other vehicle detection unit 18 is configured to be able to detect the inter-vehicle distance between the own vehicle and the preceding vehicle and the inter-vehicle distance between the own vehicle and the following vehicle.
- the display control unit 20 is configured such that the other vehicle detection unit 18 does not detect the preceding vehicle, or the distance between the preceding vehicle and the own vehicle detected by the other vehicle detection unit 18 that the other vehicle detection unit 18 detects the preceding vehicle. Is equal to or greater than the predetermined distance, it is determined that there is no preceding vehicle that forms a platoon with the vehicle (S340: NO).
- the display control unit 20 It is determined that there is a succeeding vehicle that does not form a convoy between them (S350: YES).
- the vehicle display method for selectively executing the rear enlarged display mode displayed on the vehicle 12 is performed as follows. In other words, the upward gradient of the road on which the vehicle is traveling increases (S310: YES), and a decrease in the vehicle speed is detected after the upward gradient of the road increases (S330: YES). If it is determined that there is no preceding vehicle that forms a platoon in (S340: NO) and that there is a subsequent vehicle that does not form a platoon with itself (S350: YES) Execute the rear enlarged display mode.
- the display unit 12 shows a larger size of the succeeding vehicle as compared to when the rear normal display mode is executed, and the driver is notified of the own vehicle. Can be noticed that is becoming a cause of traffic congestion. As a result, the occurrence of traffic congestion is suppressed by the user appropriately operating the accelerator.
- the preceding vehicle constituting the platoon with the own vehicle It is determined that there is no car (S340: NO). If the following vehicle is detected and the distance between the detected succeeding vehicle and the own vehicle is a predetermined distance or more, it is determined that there is a following vehicle that does not form a platoon with the own vehicle. (S350: YES).
- the user while driving on a road where there is a possibility of traffic congestion due to upslope, the user notices that the vehicle may become a cause of traffic jam due to a decrease in vehicle speed due to the upslope, and suppresses the occurrence of traffic jams. can do.
- the inner rear view mirror 7 with a display function corresponds to the display unit 12.
- the navigation display 6 corresponds to the display unit 12.
- the display control unit 20 is configured to selectively execute the navigation display mode in addition to the rear normal display mode and the rear enlarged display mode.
- the display control unit 20 displays a navigation image for guiding the vehicle on the navigation display 6.
- the display control unit 20 executes the navigation display mode (S410).
- the display control unit 20 determines, based on the road gradient information acquired by the road gradient information acquisition unit 16, whether the gradient of the road on which the vehicle is traveling has a gradient change that may cause traffic congestion ( S420). If it is determined in S420 that there is no change in gradient that may cause traffic jam (S420: NO), the display control unit 20 advances the process to S430. If it is determined in S420 that there has been a change in gradient that may cause traffic congestion (S420: YES), the display control unit 20 advances the process to S440.
- the display control unit 20 determines whether there is a subsequent vehicle that does not form a platoon with the host vehicle based on the detection result of the other vehicle detection unit 18 (S440). In S440, when it is determined that there is no subsequent vehicle that does not form a platoon with the host vehicle (S440: NO), the display control unit 20 advances the process to S430. On the other hand, if it is determined in S440 that there is a subsequent vehicle that does not form a platoon with the vehicle (S440: YES), the display control unit 20 advances the process to S450.
- the display control unit 20 executes the backward normal display mode (S450), and advances the process to S460.
- the display control unit 20 determines, based on the vehicle speed acquired by the other vehicle detection unit 18, whether the vehicle speed of the host vehicle has decreased after the above-described gradient change (S460). In S460, when it is determined that the vehicle speed of the host vehicle has not decreased after the change in the slope (S460: NO), the display control unit 20 advances the process to S430. In S460, when it is determined that the vehicle speed has decreased after the above-described gradient change (S460: YES), the display control unit 20 advances the process to S470.
- the display control unit 20 determines whether there is a preceding vehicle that forms a platoon with the own vehicle based on the detection result of the other vehicle detection unit 18 (S470). If it is determined in S470 that there is a preceding vehicle that forms a platoon with the vehicle (S470: YES), the display control unit 20 advances the process to S430. On the other hand, if it is determined in S470 that there is no preceding vehicle that forms a platoon with the vehicle (S470: NO), the process proceeds to S480.
- the display control unit 20 executes the rear enlarged display mode (S480), and returns the process to S420.
- the vehicle display device 9 normally has the possibility that the own vehicle may cause a traffic jam even in a state where the display other than the rear display is performed such as the execution of the navigation display mode.
- the normal rear display mode is executed at an early stage (S450), and if the own vehicle is causing the traffic jam more clearly, the rear enlarged display mode is executed (S480).
- S450 early stage
- S480 rear enlarged display mode
- the display control unit 20 determines whether a rear image is being displayed on the navigation display 6 (S430). In other words, the display control unit 20 determines whether the rear normal display mode or the rear enlarged display mode is being executed (S430). In S430, when the rear image is being displayed on the navigation display 6 (S430: YES), the display control unit 20 finishes displaying the rear image on the navigation display 6 (S490), and ends the process. On the other hand, in S430, when the rear image is not being displayed on the navigation display 6 (S430: NO), the display control unit 20 ends the process.
- the cluster panel 3 or the head-up display 8 may be used as the display unit 12.
- the display control unit 20 when it is determined in S340 that there is no preceding vehicle that forms a platoon with the own vehicle (S340: NO), the display control unit 20 performs processing. To S342.
- the display control unit 20 determines whether there is a preceding vehicle that is more than a predetermined distance away from the host vehicle based on the detection result of the other vehicle detection unit 18 (S342).
- the “preceding vehicle that is more than a predetermined distance” means a preceding vehicle that does not form a platoon with the host vehicle.
- the display control unit 20 advances the process to S320.
- the display control unit 20 advances the process to S344.
- the display control unit 20 determines whether the inter-vehicle distance between the preceding vehicle and the own vehicle which are separated by the predetermined distance or more is large (S344). If it is determined that the inter-vehicle distance between the preceding vehicle and the subject vehicle that is more than the predetermined distance is larger (S344: YES), the display control unit 20 advances the process to S350. On the other hand, if it is determined that the inter-vehicle distance between the preceding vehicle and the own vehicle that is more than the predetermined distance is not large (S344: NO), the display control unit 20 advances the process to S320.
- the vehicle display device 9 detects the preceding vehicle and the own vehicle detected by the other vehicle detection unit 18 when the other vehicle detection unit 18 detects the preceding vehicle (S342: YES).
- the inter-vehicle distance increases S344: YES
- the rear enlarged display mode is executed. Therefore, by increasing the inter-vehicle distance with the preceding vehicle that is traveling at an appropriate inter-vehicle distance that does not constitute a platoon, the vehicle speed is clearly higher than the preceding vehicle or the preceding vehicle group due to the increase in the upward gradient. Can be judged to be a factor of traffic congestion. It is effective to suppress the occurrence of traffic jams to recognize that the vehicle is becoming a factor of traffic jams under such conditions.
- the display control unit 20 when it is determined in S470 that there is no preceding vehicle that forms a platoon with the own vehicle (S470: NO), the display control unit 20 performs processing. To S472.
- the display control unit 20 determines whether there is a preceding vehicle that is more than a predetermined distance away from the host vehicle based on the detection result of the other vehicle detection unit 18 (S472).
- the “preceding vehicle that is more than a predetermined distance” means a preceding vehicle that does not form a platoon with the host vehicle. If it is determined that there is no preceding vehicle that is more than the predetermined distance (S472: NO), the display control unit 20 advances the process to S430. On the other hand, when it is determined that there is a preceding vehicle that is more than a predetermined distance (S472: YES), the display control unit 20 advances the process to S474.
- the display control unit 20 determines whether the inter-vehicle distance between the preceding vehicle and the own vehicle that are separated by the predetermined distance or more is large (S474). If it is determined that the inter-vehicle distance between the preceding vehicle and the subject vehicle that is more than the predetermined distance is larger (S474: YES), the display control unit 20 advances the process to S480. On the other hand, if it is determined that the inter-vehicle distance between the preceding vehicle and the own vehicle that is more than the predetermined distance is not large (S474: NO), the display control unit 20 advances the process to S430.
- the vehicle display device 9 detects the preceding vehicle and the own vehicle detected by the other vehicle detection unit 18 when the other vehicle detection unit 18 detects the preceding vehicle (S472: YES).
- the inter-vehicle distance increases S474: YES
- the rear enlarged display mode is executed. Therefore, by increasing the inter-vehicle distance with the preceding vehicle that is traveling at an appropriate inter-vehicle distance that does not constitute a platoon, the vehicle speed is clearly higher than the preceding vehicle or the preceding vehicle group due to the increase in the upward gradient. Can be judged to be a factor of traffic congestion. Under such conditions, even when a display other than the rear display is made, it is more effective to suppress the occurrence of the traffic jam to make the vehicle aware of the traffic jam.
- the display control unit 20 when it is determined in S350 that there is a subsequent vehicle that does not form a platoon with the own vehicle (S350: YES), the display control unit 20 performs the process. Proceed to S352.
- the display control unit 20 determines whether the inter-vehicle distance between the succeeding vehicle and the host vehicle is small (S352). If it is determined that the inter-vehicle distance between the succeeding vehicle and the host vehicle is small (S352: YES), the display control unit 20 advances the process to S360. On the other hand, if it is determined in S352 that the inter-vehicle distance between the succeeding vehicle and the host vehicle is not small (S352: NO), the display control unit 20 advances the process to S320.
- the other vehicle detection unit 18 detects the following vehicle, and the inter-vehicle distance between the subsequent vehicle and the own vehicle detected by the other vehicle detection unit 18 decreases.
- the rear enlarged display mode is executed. Therefore, by reducing the inter-vehicle distance with the following vehicle that is traveling at an appropriate inter-vehicle distance that does not constitute a platoon, the vehicle speed is clearly higher than that of the subsequent vehicle or the group of subsequent vehicles due to an increase in the upward gradient. Can be judged to be a factor of traffic congestion. It is effective to suppress the occurrence of traffic jams to recognize that the vehicle is becoming a factor of traffic jams under such conditions.
- the normal display mode is executed or continued. Also good.
- An example of a decrease in the inter-vehicle distance of 5 m per second is that the relative speed difference between the following vehicle and the host vehicle is 18 km / h. If the inter-vehicle distance is rapidly decreasing due to such a speed difference, This is because it is important to properly grasp the sense of distance from the following vehicle.
- the display control unit 20 determines whether the inter-vehicle distance between the following vehicle (S440) that does not form a platoon with the own vehicle and the own vehicle is small (S476). If it is determined that the inter-vehicle distance between the succeeding vehicle and the host vehicle is small (S476: YES), the display control unit 20 advances the process to S480. On the other hand, if it is determined in S476 that the inter-vehicle distance between the succeeding vehicle and the host vehicle is not small (S476: NO), the display control unit 20 advances the process to S430.
- the vehicle display device 9 detects the following vehicle by the other vehicle detection unit 18 (S440) and the inter-vehicle distance between the subsequent vehicle and the own vehicle detected by the other vehicle detection unit 18. Is decreased (S476: YES), the rear enlarged display mode is executed. Therefore, by reducing the inter-vehicle distance with the following vehicle that is traveling at an appropriate inter-vehicle distance that does not constitute a platoon, the vehicle speed is clearly higher than that of the subsequent vehicle or the group of subsequent vehicles due to an increase in the upward gradient. Can be judged to be a factor of traffic congestion.
- the inter-vehicle distance is rapidly decreasing, such as when the inter-vehicle distance between the following vehicle and the own vehicle is decreasing by 5 m or more per second at the time of the determination in S476, the normal display mode is executed or continued. Also good.
- An example of a decrease in the inter-vehicle distance of 5 m per second is that the relative speed difference between the following vehicle and the host vehicle is 18 km / h. If the inter-vehicle distance is rapidly decreasing due to such a speed difference, This is because it is important to properly grasp the sense of distance from the following vehicle.
- the vehicle display device 9 further includes a traffic jam frequent section information acquisition unit 28 that acquires traffic jam frequent section information, which is known information for identifying a traffic jam frequent section.
- the heavy traffic jam section information acquisition unit 28 acquires the heavy traffic jam section information from the external server 29 via wireless communication such as WAN (Wide Area Network), for example.
- the heavy traffic jam section information acquisition unit 28 may use the heavy traffic jam section information stored in the navigation system.
- the display control unit 20 causes traffic congestion on the gradient of the road on which the vehicle is traveling based on the road gradient information acquired by the road gradient information acquisition unit 16.
- the display control unit 20 Prior to determining whether or not there is a change in the slope to be obtained (S310), it is determined whether the road on which the vehicle is traveling is a heavy traffic jam section based on the heavy traffic jam section information acquired by the heavy traffic jam section information acquisition unit 28 (S308). If it is determined that the road on which the vehicle is traveling is a heavy traffic jam section (S308: YES), the display control unit 20 executes the rear enlarged display mode. On the other hand, if it is determined that the road on which the vehicle is traveling is not a heavy traffic jam section (S308: NO), the display control unit 20 advances the process to S320.
- the display control unit 20 displays the rear enlarged display.
- Many of the heavy traffic congestion sections are sections in which traffic congestion occurs chronically due to a change in gradient as determined in S310. Under such conditions, it is more effective to suppress the occurrence of traffic jams to recognize that the vehicle is becoming a factor of traffic jams.
- the vehicle display device 9 further includes a traffic jam frequent section information acquisition unit 28 that acquires traffic jam frequent section information, which is known information for identifying a traffic jam frequent section.
- a traffic jam frequent section information acquisition unit 28 that acquires traffic jam frequent section information, which is known information for identifying a traffic jam frequent section.
- the configuration of the heavy traffic jam section information acquisition unit 28 is the same as that of the seventh embodiment shown in FIG.
- the display control unit 20 causes traffic congestion on the gradient of the road on which the vehicle is traveling based on the road gradient information acquired by the road gradient information acquisition unit 16.
- the display control unit 20 Prior to determining whether or not there is a change to be obtained (S420), it is determined whether the road on which the vehicle is traveling is a heavy traffic jam section based on the heavy traffic jam section information acquired by the heavy traffic jam section information acquisition unit 28 ( S412). If it is determined that the road on which the vehicle is traveling is a heavy traffic jam section (S412: YES), the display control unit 20 executes the rear enlarged display mode. On the other hand, when it is determined that the road on which the vehicle is traveling is not a heavy traffic jam section (S412: NO), the display control unit 20 advances the process to S430.
- the display control unit 20 displays the rear enlarged display.
- Many of the heavy traffic congestion sections are sections in which traffic congestion occurs chronically due to a change in gradient as determined in S310. Under such conditions, even when a display other than the rear display is made, it is more effective to suppress the occurrence of the traffic jam to make the vehicle aware of the traffic jam.
- the rear enlarged display mode is a mode in which the second field angle image 27 is enlarged and displayed on the display unit 12.
- the rear enlarged display mode may be a mode in which the first view angle image 26 and the enlarged second view angle image 27 are alternately displayed on the display unit 12.
- the display control unit 20 executes the rear magnified display mode
- the background of the following vehicle F is displayed in red so that the presence of the following vehicle F is emphasized on the display unit 12.
- the display may be made to make the driver more aware of the presence of the following vehicle.
- the traveling speed of the host vehicle may be added to the condition. For example, when determining whether or not the vehicle speed of the own vehicle has decreased (S330, S460), for example, even if it is determined that the vehicle speed of the own vehicle has decreased, the traveling speed at that time is When the speed is higher than a predetermined speed, such as when the speed is higher than the legal speed of the road, the rear normal display mode is executed or continued.
- the ninth embodiment will be described below with reference to FIGS. Hereinafter, the point that this embodiment is different from the first embodiment will be described, and redundant description will be omitted.
- the ninth embodiment relates to another example of the rear enlarged display mode, and can be applied to any of the other embodiments described above.
- FIG. 16 shows a functional block diagram of the vehicle display device 9.
- the other vehicle detection unit 18 of the present embodiment includes a recognition processing unit 40 in addition to detecting the preceding vehicle and the subsequent vehicle by the millimeter wave radar 23.
- the recognition processing unit 40 refers to the recognition dictionary stored in the recognition dictionary storage unit 41 to recognize a subsequent vehicle in the rear image 25 captured by the imaging unit 24.
- the following vehicle is not limited to a four-wheeled vehicle, but may be a two-wheeled vehicle.
- the recognition processing unit 40 performs pattern matching between the shape of the edge-detected feature portion and the recognition dictionary for each predetermined frame or every frame of the rear image 25 captured by the imaging unit 24.
- the range of the other vehicle detection by the recognition processing unit 40 may be the entire range of the rear image 25, but the processing burden is more likely to be performed on the range of the first angle-of-view image 26 (see also FIG. 3). Few.
- the millimeter wave radar 23 detects the inter-vehicle distance between the own vehicle and the following vehicle, as in the other embodiments, but the detection of the inter-vehicle distance using the millimeter wave radar 23 is located immediately behind the own vehicle. It may be intended only for the following vehicle traveling in the lane in which the host vehicle is traveling.
- the other vehicle detection unit 18 including the recognition processing unit 40 detects a plurality of vehicles in the first view angle image 26 as shown in FIG. 17, the first view angle image of each vehicle is detected for each vehicle.
- the recognition processing unit 40 may perform lane recognition processing to recognize the presence of a subsequent vehicle for each lane.
- the display control unit 20 detects a succeeding vehicle in the lane in which the host vehicle is traveling and a succeeding vehicle in the lane adjacent to the lane in which the host vehicle is traveling as a succeeding vehicle with respect to the host vehicle.
- the second area is set as follows.
- the display control unit 20 includes a second area including a succeeding vehicle in the lane in which the host vehicle is traveling, and a subsequent vehicle traveling in a lane adjacent to the lane in which the host vehicle is traveling. The second area is set so as not to be included.
- the display control unit 20 when executing the rear enlarged display mode, the display control unit 20 superimposes the enlarged second view angle image 27 on the first view angle image 26, and the first view on which the second view angle image 27 is superimposed.
- the corner image 26 is displayed on the display unit 12.
- the display control unit 20 when superimposing the enlarged second view angle image 27 on the first view angle image 26, In the angle-of-view image 26, the enlarged second angle-of-view image 27 is superimposed on the first angle-of-view image 26 so as not to cover the following vehicle in the lane adjacent to the lane in which the vehicle is traveling.
- the display control unit 20 when executing the rear enlarged display mode, the display control unit 20 superimposes the enlarged second field angle image 27 on the first field angle image 26 in a transmissive state, The first view angle image 26 on which the view angle image 27 is superimposed may be displayed on the display unit 12.
- the driver can be made aware that the vehicle is becoming a factor of traffic jam. At this time, for example, when the vehicle is traveling in an overtaking lane, the driver may perform an operation of returning to the traveling lane. In this case, according to the present embodiment, it is possible to appropriately confirm that the following vehicle is present in the adjacent lane, and the display mode of the subsequent vehicle in the adjacent lane is not changed. Will not change, and will be able to change lanes without problems.
- the present invention is applicable to a vehicle display device and has industrial applicability.
- Vehicle display device 11 Camera 12 Display unit 16 Road gradient information acquisition unit 17 Vehicle speed acquisition unit 18 Other vehicle detection unit 19 Imaging control unit 20 Display control unit
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Traffic Control Systems (AREA)
Abstract
表示制御部(20)は、後方画像(25)の第1の領域の画像としての第1画角画像(26)を表示部(12)に表示する後方通常表示モードと、後方画像(25)の第1画角画像(26)よりも小さい第2の領域の画像としての第2画角画像(27)を拡大して表示部(12)に表示する後方拡大表示モードと、を選択的に実行可能である。表示制御部(20)は、自車が走行している道路の上る勾配が増加し(S310:YES)、道路の上り勾配が増加した後に自車の車速が低下し(S330:YES)、自車との間で隊列を構成している先行車が存在せず(S340:NO)、且つ、自車との間で隊列を構成していない後続車が存在している(S350:YES)場合、後方拡大表示モードを実行する。
Description
本発明は、車両用表示装置及び車両用表示方法に関する。
高速道路においては、上り勾配が始まる地点で渋滞が多発する。これは、上り勾配が始まると車速が低下し、その後続車が連鎖的に減速を余儀なくされるからである。
この種の技術として、特許文献1は、前方に位置する車両の速度情報等の航法情報から渋滞情報の有無を判定し、走行中の車両が渋滞に巻き込まれる前に当該渋滞情報をユーザーに報知する車両情報伝送システムを開示している。
ところで、上り勾配の増加による車速の低下に気付かずに自車が渋滞の発生要因となることがある。その多くは、運転者が速度計の確認や前後の車両との位置関係の把握を適切に行っていないことによる。このようなときに、急に警告表示や警告音が発せられると、運転者は瞬時に原因が把握できずに突発的な反動としてさらに減速してしまう。また、インナーリアビューミラーやバックモニターに映る後続車が前より大きく映るようになることにより後続車の接近に気付く場合もあるが、このような状態では既に渋滞発生要因となっていることが多い。
上記特許文献1の構成では、発生した渋滞に対する警告を行うが、渋滞発生要因となる車両への働きかけによる渋滞発生の抑制とはならない。
本発明の目的は、渋滞の発生を抑制するため、運転者に自車が渋滞発生要因となることを気付かせる技術を提供することにある。
本実施形態の第1の態様は、自車が走行している道路の勾配情報を取得する道路勾配情報取得部と、前記自車の車速を取得する車速取得部と、前記自車に対する先行車及び後続車を検出する他車検出部と、前記自車の後方を撮像する撮像部と、表示部と、前記撮像部が撮像した後方画像を前記表示部に表示する表示制御部と、を備え、前記表示制御部は、前記後方画像の第1の領域の画像を前記表示部に表示する後方通常表示モードと、前記後方画像の前記第1の領域よりも小さい第2の領域の画像を拡大して前記表示部に表示する後方拡大表示モードと、を選択的に実行可能であり、前記表示制御部は、前記道路勾配情報取得部が取得した勾配情報に基づき、前記自車が走行している前記道路の上り勾配が増加した後に前記自車の車速が低下したことが検出され、前記他車検出部が検出した結果に基づき、前記自車との間で隊列を構成している前記先行車が存在せず、且つ、前記自車との間で隊列を構成していない前記後続車が存在していると判定された場合、前記後方拡大表示モードを実行する、車両用表示装置である。
本実施形態の第2の態様は、自車の後方を撮像して得られた後方画像の第1の領域の画像を表示部に表示する後方通常表示モードと、前記後方画像の前記第1の領域よりも小さい第2の領域の画像を拡大して前記表示部に表示する後方拡大表示モードと、を選択的に実行する、車両用表示方法であって、前記自車が走行している道路の上り勾配が増加し、前記道路の上り勾配が増加した後に前記自車の車速の低下が検出され、前記自車との間で隊列を構成している先行車が存在せず、且つ、前記自車との間で隊列を構成していない後続車が存在していると判定された場合、前記後方拡大表示モードを実行する、車両用表示方法である。
本実施形態によれば、渋滞の発生を抑制するため、運転者に自車が渋滞発生要因となることを気付かせる技術を提供することができる。
(第1実施形態)
以下、図1~図6を参照して、第1実施形態を説明する。図1には、車両内の運転席前方の例を模式的に示している。図1に示すように、運転席の前方には、ウィンドシールド1、ダッシュボード2、クラスターパネル3、ステアリングホイール4、センターコンソールパネル5、ナビゲーションディスプレイ6、表示機能付きインナーリアビューミラー7、ヘッドアップディスプレイ8が配置されている。図1に示すヘッドアップディスプレイ8は、本体ではなく虚像の投映範囲を示す。
以下、図1~図6を参照して、第1実施形態を説明する。図1には、車両内の運転席前方の例を模式的に示している。図1に示すように、運転席の前方には、ウィンドシールド1、ダッシュボード2、クラスターパネル3、ステアリングホイール4、センターコンソールパネル5、ナビゲーションディスプレイ6、表示機能付きインナーリアビューミラー7、ヘッドアップディスプレイ8が配置されている。図1に示すヘッドアップディスプレイ8は、本体ではなく虚像の投映範囲を示す。
クラスターパネル3、ナビゲーションディスプレイ6、表示機能付きインナーリアビューミラー7、ヘッドアップディスプレイ8のうち少なくとも1つが、表示部として機能する。本実施形態では、表示機能付きインナーリアビューミラー7が表示部として機能する。
図2には、車両用表示装置9の機能ブロック図を示している。図2に示すように、車両用表示装置9は、制御部10と、カメラ11と、表示部12によって構成されている。
カメラ11は、自車の後方を撮像して画像データを生成し、生成した画像データを制御部10に出力する。
表示部12は、本実施形態において、表示機能付きインナーリアビューミラー7に相当している。
制御部10は、中央演算処理器としてのCPU13(Central Processing Unit)と、読み書き自由のRAM14(Random Access Memory)、読み出し専用のROM15(Read Only Memory)を備えている。そして、CPU13がROM15に記憶されている車両用表示プログラムを読み出して実行することで、車両用表示プログラムは、CPU13などのハードウェアを、道路勾配情報取得部16、車速取得部17、他車検出部18、撮像制御部19、表示制御部20、として機能させる。
道路勾配情報取得部16は、例えば、車両に搭載された傾斜角センサ21の出力値に基いて、自車が走行している道路の道路勾配情報を取得する。道路勾配情報取得部16は、傾斜角センサ21の出力値を用いて道路勾配情報を取得することに代えて、予めナビゲーションシステムに記憶されている地図情報や路線情報、WAN(Wide Area Network)等の無線通信を介して受信した地図情報や路線情報を用いて道路勾配情報を取得するようにしてもよい。
また、道路勾配情報取得部16の他の例としては、撮像部24を構成するカメラ11に、車両の前方を撮像するカメラを備え、道路勾配情報取得部16が、車両の前方を撮像した前方画像の画像認識処理により傾斜情報を示す標識を認識させて、勾配情報を取得してもよい。
車速取得部17は、例えば、CAN22(Controller Area Network)を介して自車の車速を取得する。車速取得部17は、CAN22を介して自車の車速を取得することに代えて、GPS(Global Positioning System)で受信した位置情報を用いて自車の車速を取得してもよい。
他車検出部18は、例えば、ミリ波レーダー23を用いて、自車と先行車との車間距離、自車と後続車との車間距離を検出する。ミリ波レーダー23を用いた場合、自車から最大で150m離れた先行車を検出可能である。同様に、ミリ波レーダー23を用いた場合、自車から最大で150m離れた後続車を検出可能である。従って、他車検出部18は、自車の現在位置から前方へ150mの範囲内における先行車の有無を検出する。同様に、他車検出部18は、自車の現在位置から後方へ150mの範囲内における後続車の有無を検出する。他車検出部18は、ミリ波レーダー23を用いて先行車及び後続車を検出することに代えて、例えば、前方及び後方を撮像するカメラで生成された画像データを画像解析することで、先行車及び後続車を検出するようにしてもよい。
撮像制御部19は、カメラ11による撮像を制御する。本実施形態において、カメラ11及び撮像制御部19が、自車の後方を撮像する撮像部24を構成している。即ち、撮像部24は、自車の後方を撮像する。撮像部24が撮像した後方画像25を図3に例示する。図3に示す第1画角画像26および第2画角画像27は、表示対象となる表示面の形状に合わせた切り出し形状で切り出される。また、後述する後方通常表示モードと後方拡大表示モードに対応した切り出し範囲でもある。
表示制御部20は、撮像部24が撮像した後方画像25を表示部12に表示する。具体的には、表示制御部20は、後方通常表示モードと後方拡大表示モードを選択的に実行可能である。後方通常表示モードとは、図4に示すように、後方画像25のうち、第1の領域の画像としての第1画角画像26を表示部12(本実施形態では表示機能付きインナーリアビューミラー7)に表示するモードである。後方通常表示モードで表示する第1画角画像26は、鏡を用いた一般的なインナーリアビューミラーで後方を見たときと同等の画角となるように設定され、後続車Fとの車間距離が適切に把握できる画角でもある。後方拡大表示モードとは、図5に示すように、後方画像25のうち、第2の領域の画像としての第2画角画像27を拡大して表示部12(本実施形態では表示機能付きインナーリアビューミラー7)に表示するモードである。第2の領域は、第1の領域の内側の領域であって、第1の領域よりも狭い領域である。即ち、第2画角画像27は、第1画角画像26の内側の領域であって、第1画角画像26よりも狭い範囲の画像である。従って、図4に示す後方通常表示モードで表示機能付きインナーリアビューミラー7に映る後続車Fよりも、図5に示す後方拡大表示モードで表示機能付きインナーリアビューミラー7に映る後続車Fの方が、表示機能付きインナーリアビューミラー7に大きく映る。
次に、図6を参照して、車両用表示装置9の動作を詳細に説明する。
まず、表示制御部20は、道路勾配情報取得部16が取得した道路勾配情報に基づいて、自車が走行している道路の勾配に、渋滞の原因となり得る勾配の変化があったか判定する(S310)。渋滞の原因となり得る勾配の変化とは、自車が走行している道路の上り勾配が増加した変化であり、具体的には、自車が走行している道路の勾配が下り勾配又は水平から上り勾配へと変わる変化、自車が走行している道路の上り勾配がきつくなるような変化である。S310において、渋滞の原因となり得る勾配の変化がなかったと判定した場合は(S310:NO)、表示制御部20は、後方通常表示モードを実行または継続し(S320)、処理を終了する。S310において、渋滞の原因となり得る勾配の変化があったと判定した場合は(S310:YES)、表示制御部20は、処理をS330に進める。
S330において、表示制御部20は、他車検出部18によって取得された車速に基づいて、上記の勾配変化があった後に自車の車速が低下したか判定する(S330)。ここで言う「自車の車速が低下」とは、運転者が定速走行を行っているときの勾配の増加による運転者が意識しない程度の車速の低下であるため、急激な車速の低下を除外するものとし、例えば、毎秒1~3km/h程度の緩やかな車速の低下を意味する。S330において、上記の勾配変化があった後に自車の車速が低下していないと判定した場合は(S330:NO)、表示制御部20は、後方通常表示モードを実行または継続し(S320)、処理を終了する。S330において、上記の勾配変化があった後に自車の車速が低下したと判定した場合は(S330:YES)、表示制御部20は、処理をS340に進める。
S340において、表示制御部20は、他車検出部18の検出結果に基づいて、自車との間で隊列を構成している先行車が存在するか判定する(S340)。ここで、「自車との間で隊列を構成している先行車」とは、自車の現在位置から前方へ所定距離離れた位置までの範囲内に位置している先行車を意味している。所定距離は、渋滞時に隊列走行を行う程度の距離を意味する。例えば、高速道路においては、所定距離は、約20mである。一般道路においては、所定距離は、約10mである。従って、「自車との間で隊列を構成している先行車が存在していない」とは、自車の現在位置から前方へ所定距離離れた位置までの範囲内に位置している先行車が存在しないことを意味しており、自車の現在位置より前方へ所定距離以上離れた位置に存在する先行車の有無は関係ない。S340において、自車との間で隊列を構成している先行車が存在すると判定した場合は(S340:YES)、表示制御部20は、後方通常表示モードを実行または継続し(S320)、処理を終了する。なぜなら、自車との間で隊列を構成している先行車が存在する場合は、既に渋滞が発生しているか、自車ではなく先行車が渋滞の発生要因となっている可能性があるためである。一方、S340において、自車との間で隊列を構成している先行車が存在しないと判定した場合は(S340:NO)、表示制御部20は、処理をS350に進める。
S350において、表示制御部20は、他車検出部18の検出結果に基づいて、自車との間で隊列を構成していない後続車が存在するか判定する(S350)。ここで、「自車との間で隊列を構成していない後続車が存在する」とは、自車の現在位置から後方へ所定距離離れた位置までの範囲内に後続車が存在せず、且つ、自車の現在位置から後方へ所定距離以上離れた位置に後続車が存在していることを意味している。所定距離は、上記同様、渋滞時に隊列走行を行う程度の距離を意味する。例えば、高速道路においては、所定距離は、約20mである。一般道路においては、所定距離は、約10mである。S350において、自車との間で隊列を構成していない後続車が存在しないと判定した場合は(S350:NO)、表示制御部20は、後方通常表示モードを実行または継続し(S320)、処理を終了する。なぜなら、自車の現在位置から後方へ所定距離離れた位置までの範囲内に後続車が存在すれば既に渋滞が発生しているし、自車の現在位置から後方へ所定距離以上離れた位置に後続車が存在していなければ自車が渋滞の発生要因となっていないためある。一方、S350において、自車との間で隊列を構成していない後続車が存在すると判定した場合は(S350:YES)、表示制御部20は、処理をS360に進める。
S360において、表示制御部20は、後方拡大表示モードを実行する(S360)。このように、表示制御部20は、自車が渋滞の発生要因となりつつある場合は後方拡大表示モードを実行し、それ以外の場合では後方通常表示モードを実行する。これにより、自車が渋滞の発生要因となりつつあるとき、表示機能付きインナーリアビューミラー7には後続車が後方通常表示モードの実行時と比較して大きく映ることになり、運転者に、自車が渋滞の発生要因となりつつあることを気付かせることができる。この結果、ユーザーが適切にアクセルを操作することで、渋滞の発生が抑制されることになる。
以上に第1実施形態を説明したが、上記第1実施形態は、以下のように特徴付けられる。
即ち、車両用表示装置9は、自車が走行している道路の勾配を取得する道路勾配取得部16と、自車の車速を取得する車速取得部17と、先行車及び後続車を検出する他車検出部18と、自車の後方を撮像する撮像部24と、表示部12と、撮像部24が撮像した後方画像を表示部12に表示する表示制御部20と、を備える。表示制御部20は、後方画像25の第1の領域の画像としての第1画角画像26を表示部12に表示する後方通常表示モードと、後方画像25の第1画角画像26よりも小さい第2の領域の画像としての第2画角画像27を拡大して表示部12に表示する後方拡大表示モードと、を選択的に実行可能である。表示制御部20は、自車が走行している道路の上り勾配が増加(S310:YES)した後に自車の車速が低下したことが検出され(S330:YES)、自車との間で隊列を構成している先行車が存在せず(S340:NO)、且つ、自車との間で隊列を構成していない後続車が存在している(S350:YES)と判定された場合、後方拡大表示モードを実行する。以上の構成によれば、自車が渋滞の発生要因となりつつあるとき、表示部12には後続車が後方通常表示モードの実行時と比較して大きく映ることになり、運転者に、自車が渋滞の発生要因となりつつあることを気付かせることができる。この結果、ユーザーが適切にアクセルを操作することで、渋滞の発生が抑制されることになる。
また、他車検出部18は、自車と先行車との車間距離、及び、自車と後続車との車間距離を検出可能に構成されている。表示制御部20は、他車検出部18が先行車を検出せず、又は、他車検出部18が先行車を検出したものの他車検出部18が検出した先行車と自車との車間距離が所定距離以上であった場合、自車との間で隊列を構成している先行車が存在しないと判定する(S340:NO)。表示制御部20は、他車検出部18が後続車を検出し、且つ、他車検出部18が検出した後続車と自車との車間距離が所定距離以上であった場合、自車との間で隊列を構成していない後続車が存在していると判定する(S350:YES)。
自車の後方を撮像して得られた後方画像25の第1画角画像26を表示部12に表示する後方通常表示モードと、後方画像25の第2画角画像27を拡大して表示部12に表示する後方拡大表示モードと、を選択的に実行する、車両用表示方法は、以下のように行われる。即ち、自車が走行している道路の上り勾配が増加し(S310:YES)、道路の上り勾配が増加した後に自車の車速の低下が検出され(S330:YES)、自車との間で隊列を構成している先行車が存在せず(S340:NO)、且つ、自車との間で隊列を構成していない後続車が存在している(S350:YES)と判定された場合、後方拡大表示モードを実行する。以上の方法によれば、自車が渋滞の発生要因となりつつあるとき、表示部12には後続車が後方通常表示モードの実行時と比較して大きく映ることになり、運転者に、自車が渋滞の発生要因となりつつあることを気付かせることができる。この結果、ユーザーが適切にアクセルを操作することで、渋滞の発生が抑制されることになる。
また、先行車を検出せず、又は、先行車を検出したものの検出した先行車と自車との車間距離が所定距離以上であった場合、自車との間で隊列を構成している先行車が存在しないと判定する(S340:NO)。後続車を検出し、且つ、検出した後続車と自車との車間距離が所定距離以上であった場合、自車との間で隊列を構成していない後続車が存在していると判定する(S350:YES)。
上記第1実施形態では、上り勾配による渋滞発生の可能性がある道路の走行中、上り勾配による車速低下によって自車が渋滞の発生要因となる可能性をユーザーに気付かせ、渋滞の発生を抑制することができる。
(第2実施形態)
次に、図7を参照して、第2実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
次に、図7を参照して、第2実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
上記第1実施形態では、表示機能付きインナーリアビューミラー7が表示部12に相当することとした。これに対し、本実施形態では、ナビゲーションディスプレイ6が表示部12に相当することとする。
また、表示制御部20は、後方通常表示モードと後方拡大表示モードに加え、ナビゲーション表示モードを選択的に実行可能に構成されている。表示制御部20は、ナビゲーション表示モードを実行するとき、自車を道案内するナビゲーション画像をナビゲーションディスプレイ6に表示する。
次に、図7を参照して、車両用表示装置9の動作を詳細に説明する。
先ず、表示制御部20は、ナビゲーション表示モードを実行する(S410)。
次に、表示制御部20は、道路勾配情報取得部16が取得した道路勾配情報に基づいて、自車が走行している道路の勾配に、渋滞の原因となり得る勾配の変化があったか判定する(S420)。S420において、渋滞の原因となり得る勾配の変化がなかったと判定した場合は(S420:NO)、表示制御部20は、処理をS430に進める。S420において、渋滞の原因となり得る勾配の変化があったと判定した場合は(S420:YES)、表示制御部20は、処理をS440に進める。
S440において、表示制御部20は、他車検出部18の検出結果に基づいて、自車との間で隊列を構成していない後続車が存在するか判定する(S440)。S440において、自車との間で隊列を構成していない後続車が存在しないと判定した場合は(S440:NO)、表示制御部20は、処理をS430に進める。一方、S440において、自車との間で隊列を構成していない後続車が存在すると判定した場合は(S440:YES)、表示制御部20は、処理をS450に進める。
S450において、表示制御部20は、後方通常表示モードを実行し(S450)、処理をS460に進める。
S460において、表示制御部20は、他車検出部18によって取得された車速に基づいて、上記の勾配変化があった後に自車の車速が低下したか判定する(S460)。S460において、上記の勾配変化があった後に自車の車速が低下していないと判定した場合は(S460:NO)、表示制御部20は、処理をS430に進める。S460において、上記の勾配変化があった後に自車の車速が低下したと判定した場合は(S460:YES)、表示制御部20は、処理をS470に進める。
S470において、表示制御部20は、他車検出部18の検出結果に基づいて、自車との間で隊列を構成している先行車が存在するか判定する(S470)。S470において、自車との間で隊列を構成している先行車が存在すると判定した場合は(S470:YES)、表示制御部20は、処理をS430に進める。一方、S470において、自車との間で隊列を構成している先行車が存在しないと判定した場合は(S470:NO)、処理をS480に進める。
S480において、表示制御部20は、後方拡大表示モードを実行し(S480)、処理をS420に戻す。
このように、車両用表示装置9は、通常はナビゲーション表示モードの実行など、後方表示ではない表示がなされている状態であっても、自車が渋滞の発生原因となる虞がある場合はなるべく早い段階で後方通常表示モードを実行し(S450)、より明確に自車が渋滞の発生原因となりつつある場合は後方拡大表示モードを実行する(S480)。これにより、ナビゲーションディスプレイ6を用いた道案内と、ナビゲーションディスプレイ6を用いた渋滞抑制を適切に両立させ、また、渋滞抑制の強度も適切に設定することができる。
S430において、表示制御部20は、ナビゲーションディスプレイ6に後方画像を表示中か判定する(S430)。即ち、表示制御部20は、後方通常表示モード又は後方拡大表示モードを実行中か判定する(S430)。S430において、ナビゲーションディスプレイ6に後方画像を表示中である場合は(S430:YES)、表示制御部20は、ナビゲーションディスプレイ6に後方画像を表示させることを終了し(S490)、処理を終了する。一方、S430において、ナビゲーションディスプレイ6に後方画像を表示中でない場合は(S430:NO)、表示制御部20は、処理を終了する。
ナビゲーションディスプレイ6に代えて、クラスターパネル3やヘッドアップディスプレイ8を表示部12として用いてもよい。
(第3実施形態)
次に、図8を参照して、第3実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
次に、図8を参照して、第3実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
図8に示すように、本実施形態では、S340において、自車との間で隊列を構成している先行車が存在しないと判定した場合は(S340:NO)、表示制御部20は、処理をS342に進める。
S342において、表示制御部20は、他車検出部18の検出結果に基づいて、自車から所定距離以上離れた先行車が存在するか判定する(S342)。ここで、「所定距離以上離れた先行車」とは、自車との間で隊列を構成していない先行車を意味する。所定距離以上離れた先行車が存在しないと判定した場合は(S342:NO)、表示制御部20は、処理をS320に進める。一方、所定距離以上離れた先行車が存在すると判定した場合は(S342:YES)、表示制御部20は、処理をS344に進める。
S344において、表示制御部20は、上記の所定距離以上離れた先行車と自車との車間距離が大きくなっているか判定する(S344)。上記の所定距離以上離れた先行車と自車との車間距離が大きくなっていると判定した場合は(S344:YES)、表示制御部20は、処理をS350に進める。一方、上記の所定距離以上離れた先行車と自車との車間距離が大きくなっていないと判定した場合は(S344:NO)、表示制御部20は、処理をS320に進める。
このように、本実施形態では、車両用表示装置9は、他車検出部18が先行車を検出し(S342:YES)、且つ、他車検出部18が検出した上記先行車と自車との車間距離が増加する場合に(S344:YES)、後方拡大表示モードを実行とする。従って、隊列を構成していない程度の適切な車間距離で走行中の先行車との車間距離が増加することで、上り勾配の増加により自車が先行車または先行車の車群より明らかに車速が低下し、渋滞の要因となっていることが判断できる。このような条件において自車が渋滞の要因となりつつあることを気付かせることは、渋滞の発生の抑制により効果的である。
(第4実施形態)
次に、図9を参照して、第4実施形態を説明する。以下、本実施形態が第2実施形態と相違する点を説明し、重複する説明は省略する。
次に、図9を参照して、第4実施形態を説明する。以下、本実施形態が第2実施形態と相違する点を説明し、重複する説明は省略する。
図9に示すように、本実施形態では、S470において、自車との間で隊列を構成している先行車が存在しないと判定した場合は(S470:NO)、表示制御部20は、処理をS472に進める。
S472において、表示制御部20は、他車検出部18の検出結果に基づいて、自車から所定距離以上離れた先行車が存在するか判定する(S472)。ここで、「所定距離以上離れた先行車」とは、自車との間で隊列を構成していない先行車を意味する。所定距離以上離れた先行車が存在しないと判定した場合は(S472:NO)、表示制御部20は、処理をS430に進める。一方、所定距離以上離れた先行車が存在すると判定した場合は(S472:YES)、表示制御部20は、処理をS474に進める。
S474において、表示制御部20は、上記の所定距離以上離れた先行車と自車との車間距離が大きくなっているか判定する(S474)。上記の所定距離以上離れた先行車と自車との車間距離が大きくなっていると判定した場合は(S474:YES)、表示制御部20は、処理をS480に進める。一方、上記の所定距離以上離れた先行車と自車との車間距離が大きくなっていないと判定した場合は(S474:NO)、表示制御部20は、処理をS430に進める。
このように、本実施形態では、車両用表示装置9は、他車検出部18が先行車を検出し(S472:YES)、且つ、他車検出部18が検出した上記先行車と自車との車間距離が増加する場合に(S474:YES)、後方拡大表示モードを実行とする。従って、隊列を構成していない程度の適切な車間距離で走行中の先行車両との車間距離が増加することで、上り勾配の増加により自車が先行車両または先行車両の車群より明らかに車速が低下し、渋滞の要因となっていることが判断できる。このような条件において、後方表示ではない表示がなされている状態であっても、自車が渋滞の要因となりつつあることを気付かせることは、渋滞の発生の抑制により効果的である。
(第5実施形態)
次に、図10を参照して、第5実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
次に、図10を参照して、第5実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
図10に示すように、本実施形態では、S350において、自車との間で隊列を構成していない後続車が存在すると判定した場合は(S350:YES)、表示制御部20は、処理をS352に進める。
S352において、表示制御部20は、上記後続車と自車との車間距離が小さくなっているか判定する(S352)。上記後続車と自車との車間距離が小さくなっていると判定した場合は(S352:YES)、表示制御部20は、処理をS360に進める。一方、上記S352において上記後続車と自車との車間距離が小さくなっていないと判定した場合は(S352:NO)、表示制御部20は、処理をS320に進める。
このように、本実施形態では、車両用表示装置9は、他車検出部18が後続車を検出し、且つ、他車検出部18が検出した後続車と自車との車間距離が減少する場合に(S352:YES)、後方拡大表示モードを実行とする。従って、隊列を構成していない程度の適切な車間距離で走行中の後続車との車間距離が小さくなることで、上り勾配の増加により自車が後続車または後続車の車群より明らかに車速が低下し、渋滞の要因となっていることが判断できる。このような条件において自車が渋滞の要因となりつつあることを気付かせることは、渋滞の発生の抑制により効果的である。ただし、S352の判定時に後続車と自車との車間距離が、例えば毎秒5m以上減少しているときなど、急速に車間距離が減少している場合は、通常表示モードを実行または継続させることとしてもよい。一例である毎秒5mの車間距離の減少とは、後続車と自車との相対的な速度差が18km/hであり、このような速度差で急速に車間距離が減少している場合は、後続車との距離感を適切に把握することが重要であるためである。
(第6実施形態)
次に、図11を参照して、第6実施形態を説明する。以下、本実施形態が第2実施形態と相違する点を説明し、重複する説明は省略する。
次に、図11を参照して、第6実施形態を説明する。以下、本実施形態が第2実施形態と相違する点を説明し、重複する説明は省略する。
図11に示すように、本実施形態では、S470において、自車との間で隊列を構成している先行車が存在しないと判定した場合は(S470:NO)、表示制御部20は、処理をS476に進める。
S476において、表示制御部20は、自車との間で隊列を構成していない後続車(S440)と自車との車間距離が小さくなっているか判定する(S476)。上記後続車と自車との車間距離が小さくなっていると判定した場合は(S476:YES)、表示制御部20は、処理をS480に進める。一方、上記S476において上記後続車と自車との車間距離が小さくなっていないと判定した場合は(S476:NO)、表示制御部20は、処理をS430に進める。
このように、本実施形態では、車両用表示装置9は、他車検出部18が後続車を検出し(S440)、且つ、他車検出部18が検出した後続車と自車との車間距離が減少する場合に(S476:YES)、後方拡大表示モードを実行とする。従って、隊列を構成していない程度の適切な車間距離で走行中の後続車との車間距離が小さくなることで、上り勾配の増加により自車が後続車または後続車の車群より明らかに車速が低下し、渋滞の要因となっていることが判断できる。このような条件において、後方表示ではない表示がなされている状態であっても、自車が渋滞の要因となりつつあることを気付かせることは、渋滞の発生の抑制により効果的である。ただし、S476の判定時に後続車と自車との車間距離が、例えば毎秒5m以上減少しているときなど、急速に車間距離が減少している場合は、通常表示モードを実行または継続させることとしてもよい。一例である毎秒5mの車間距離の減少とは、後続車と自車との相対的な速度差が18km/hであり、このような速度差で急速に車間距離が減少している場合は、後続車との距離感を適切に把握することが重要であるためである。
(第7実施形態)
以下、図12及び図13を参照して、第7実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
以下、図12及び図13を参照して、第7実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
本実施形態において、車両用表示装置9は、渋滞多発区間を特定する既知の情報である渋滞多発区間情報を取得する渋滞多発区間情報取得部28を更に備える。渋滞多発区間情報取得部28は、例えばWAN(Wide Area Network)等の無線通信を介して外部サーバ29より渋滞多発区間情報を取得する。渋滞多発区間情報取得部28は、ナビゲーションシステムに記憶されている渋滞多発区間情報を用いてもよい。
次に、図13を参照して、車両用表示装置9の動作を詳細に説明する。
図13に示すように、本実施形態では、表示制御部20は、道路勾配情報取得部16が取得した道路勾配情報に基づいて、自車が走行している道路の勾配に、渋滞の原因となり得る勾配の変化があったか判定する(S310)のに先立って、渋滞多発区間情報取得部28が取得した渋滞多発区間情報に基づいて、自車が走行している道路が渋滞多発区間であるか判定する(S308)。そして、自車が走行している道路が渋滞多発区間であると判定した場合に(S308:YES)、表示制御部20は、後方拡大表示モードを実行とする。一方、自車が走行している道路が渋滞多発区間でないと判定した場合は(S308:NO)、表示制御部20は、処理をS320に進める。
このように、本実施形態では、車両用表示装置9は、自車が走行している道路が渋滞多発区間であると判定した場合に(S308:YES)、表示制御部20は、後方拡大表示モードを実行とする。渋滞多発区間の多くは、S310で判定されるような勾配の変化によって慢性的に渋滞が発生している区画である。このような条件において、自車が渋滞の要因となりつつあることを気付かせることは、渋滞の発生の抑制により効果的である。
(第8実施形態)
以下、図14を参照して、第8実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
以下、図14を参照して、第8実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。
本実施形態において、車両用表示装置9は、渋滞多発区間を特定する既知の情報である渋滞多発区間情報を取得する渋滞多発区間情報取得部28を更に備える。渋滞多発区間情報取得部28の構成は、図12に示す第7実施形態と同様である。
次に、図14を参照して、車両用表示装置9の動作を詳細に説明する。
図14に示すように、本実施形態では、表示制御部20は、道路勾配情報取得部16が取得した道路勾配情報に基づいて、自車が走行している道路の勾配に、渋滞の原因となり得る変化があったか判定する(S420)のに先立って、渋滞多発区間情報取得部28が取得した渋滞多発区間情報に基づいて、自車が走行している道路が渋滞多発区間であるか判定する(S412)。そして、自車が走行している道路が渋滞多発区間であると判定した場合に(S412:YES)、表示制御部20は、後方拡大表示モードを実行とする。一方、自車が走行している道路が渋滞多発区間でないと判定した場合は(S412:NO)、表示制御部20は、処理をS430に進める。
このように、本実施形態では、車両用表示装置9は、自車が走行している道路が渋滞多発区間であると判定した場合に(S412:YES)、表示制御部20は、後方拡大表示モードを実行とする。渋滞多発区間の多くは、S310で判定されるような勾配の変化によって慢性的に渋滞が発生している区画である。このような条件において、後方表示ではない表示がなされている状態であっても、自車が渋滞の要因となりつつあることを気付かせることは、渋滞の発生の抑制により効果的である。
以上に、第1~第8実施形態を説明したが、上記各実施形態は以下のように変更できる。
即ち、上記各実施形態では、後方拡大表示モードとは、第2画角画像27を拡大して表示部12に表示するモードであるとした。しかし、これに代えて、後方拡大表示モードは、第1画角画像26と、拡大された第2画角画像27と、を交互に表示部12に表示するモードとしてもよい。
また、図15に示すように、表示制御部20が後方拡大表示モードを実行するとき、表示部12において後続車Fの存在が強調されるように、後続車Fの背景などを赤色表示するなど、運転者に後続車の存在を一層気付かせるような表示としてもよい。
また、上記各実施形態で説明した、後方拡大表示モードを実行する条件として、自車の走行速度を条件に加えてもよい。例えば、自車の車速が低下したか否かの判定(S330、S460)の際、例えば、自車の車速が低下したと判定された場合であっても、そのときの走行速度が走行中の道路の法定速度以上である場合など、所定の速度以上である場合、後方通常表示モードを実行または継続させる。
(第9実施形態)
以下、図16~図19を参照して、第9実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。本第9実施形態は、後方拡大表示モードの他の事例に関するものであり、上述した他の実施形態の何れにも適用可能である。
以下、図16~図19を参照して、第9実施形態を説明する。以下、本実施形態が第1実施形態と相違する点を説明し、重複する説明は省略する。本第9実施形態は、後方拡大表示モードの他の事例に関するものであり、上述した他の実施形態の何れにも適用可能である。
図16には、車両用表示装置9の機能ブロック図を示している。図16に示すように、本実施形態の他車検出部18は、ミリ波レーダー23によって先行車及び後続車の検出を行なうことに加えて、認識処理部40を有する。認識処理部40は、認識辞書記憶部41に記憶されている認識辞書を参照することで、撮像部24が撮像した後方画像25内の後続車を認識する。なお、後続車は、四輪車である場合に限らず二輪車の場合もある。
認識処理部40は、具体的には、撮像部24が撮像した後方画像25の所定フレーム毎または毎フレームに対し、エッジ検出した特徴部の形状と認識辞書とのパターンマッチングを行う。認識処理部40による他車検出の範囲は、後方画像25の全範囲であってもよいが、第1画角画像26(図3を併せて参照)の範囲に対して行なう方が処理負担が少ない。
一方、ミリ波レーダー23は、他の実施形態同様に、自車と後続車との車間距離を検出するが、ミリ波レーダー23を用いた車間距離の検出は、自車の真後ろに位置する、自車が走行している車線を走行している後続車のみを対象とするものであってよい。
認識処理部40を備えた他車検出部18は、図17に示すように、第1画角画像26内に複数の車両を検出した場合、各車両毎に、その車両の第1画角画像26内における位置及び大きさに基づいて自車との位置関係を判定することで、自車が走行している車線の後続車と、自車が走行している車線に隣接している車線の後続車とが存在することを認識する。なお、認識処理部40は、車線認識処理を行い、車線毎に後続車の存在を認識してもよい。
表示制御部20は、自車に対する後続車として、自車が走行している車線の後続車および自車が走行している車線に隣接する車線の後続車が検出され、上述する他の実施形態同様の条件を満たして後方拡大表示モードを実行する際に、第2の領域を以下のように設定する。即ち、表示制御部20は、第2の領域が、自車が走行している車線の後続車を含み、且つ、自車が走行している車線に隣接する車線を走行している後続車を含まないように、第2の領域を設定する。
また、表示制御部20は、後方拡大表示モードを実行する際、拡大した第2画角画像27を第1画角画像26に対して重畳し、第2画角画像27が重畳した第1画角画像26を表示部12に表示する。
ここで、表示制御部20は、図18に示すように、拡大した第2画角画像27を第1画角画像26に対して重畳するに際し、拡大した第2画角画像27が、第1画角画像26において、自車が走行している車線に隣接する車線の後続車を覆わないように、拡大した第2画角画像27を第1画角画像26に対して重畳する。或いは、表示制御部20は、図19に示すように、後方拡大表示モードを実行する際、拡大した第2画角画像27を第1画角画像26に対して透過状態で重畳し、第2画角画像27が重畳した第1画角画像26を表示部12に表示するように構成してもよい。
前述した第1から第8の実施形態では、自車が渋滞の要因となりつつあることを運転者に気付かせることができる。このとき、例えば自車が追い越し車線を走行中である場合は、運転者は、走行車線に戻る操作を行う場合がある。この場合、本実施形態によれば、隣接する車線に後続車が存在することが適切に確認できるとともに、隣接する車線の後続車の表示態様は変化させないため、隣接する車線の後続車に対する距離感は変化せず、問題なく車線変更を行うことができるようになる。
この出願は、2015年9月8日に出願された日本出願特願2015-176718を基礎とする優先権を主張し、その開示の全てをここに取り込む。
この出願は、2016年4月1日に出願された日本出願特願2016-074015を基礎とする優先権を主張し、その開示の全てをここに取り込む。
本発明は、車両用表示装置に適用可能であり、産業上の利用可能性を有する。
9 車両用表示装置
11 カメラ
12 表示部
16 道路勾配情報取得部
17 車速取得部
18 他車検出部
19 撮像制御部
20 表示制御部
11 カメラ
12 表示部
16 道路勾配情報取得部
17 車速取得部
18 他車検出部
19 撮像制御部
20 表示制御部
Claims (10)
- 自車が走行している道路の勾配情報を取得する道路勾配情報取得部と、
前記自車の車速を取得する車速取得部と、
前記自車に対する先行車及び後続車を検出する他車検出部と、
前記自車の後方を撮像する撮像部と、
表示部と、
前記撮像部が撮像した後方画像を前記表示部に表示する表示制御部と、
を備え、
前記表示制御部は、前記後方画像の第1の領域の画像を前記表示部に表示する後方通常表示モードと、前記後方画像の前記第1の領域よりも小さい第2の領域の画像を拡大して前記表示部に表示する後方拡大表示モードと、を選択的に実行可能であり、
前記表示制御部は、前記道路勾配情報取得部が取得した勾配情報に基づき、前記自車が走行している前記道路の上り勾配が増加したことが検出され、
前記車速取得部が取得する車速に基づき、前記道路の上り勾配が増加した後に前記自車の車速が低下したことが検出され、
前記他車検出部が検出した結果に基づき、前記自車との間で隊列を構成している前記先行車が存在せず、且つ、前記自車との間で隊列を構成していない前記後続車が存在していると判定された場合、
前記後方拡大表示モードを実行する、
車両用表示装置。 - 前記他車検出部は、前記自車と前記先行車との車間距離、及び、前記自車と前記後続車との車間距離を検出し、
前記表示制御部は、
前記他車検出部が前記先行車を検出せず、又は、前記他車検出部が前記先行車を検出したものの前記他車検出部が検出した前記先行車と前記自車との車間距離が所定距離以上であった場合、前記自車との間で隊列を構成している前記先行車が存在しないと判定し、
前記他車検出部が前記後続車を検出し、且つ、前記他車検出部が検出した前記後続車と前記自車との車間距離が所定距離以上であった場合、前記自車との間で隊列を構成していない前記後続車が存在していると判定する、
請求項1に記載の車両用表示装置。 - 前記表示制御部は、前記他車検出部が前記先行車を検出し、且つ、前記他車検出部が検出した前記先行車と前記自車との車間距離が増加する場合に、前記後方拡大表示モードを実行する、
請求項2に記載の車両用表示装置。 - 前記表示制御部は、前記他車検出部が前記後続車を検出し、且つ、前記他車検出部が検出した前記後続車と前記自車との車間距離が減少する場合に、前記後方拡大表示モードを実行する、
請求項2又は3に記載の車両用表示装置。 - 前記他車検出部は、前記自車に対する後続車として、前記自車が走行している車線の後続車および前記自車が走行している車線に隣接する車線の後続車を検出し、
前記表示制御部は、前記自車が走行している車線に隣接する車線に後続車が検出されているときは、前記後方拡大表示モードを実行する際、前記第2の領域を、前記自車が走行している車線の後続車を含む領域とする、
請求項1から4のいずれか1項に記載の車両用表示装置。 - 前記表示制御部は、前記後方拡大表示モードを実行する際、拡大した前記第2の領域の画像を前記第1の領域の画像に対して重畳し、前記第2の領域の画像が重畳した前記第1の領域の画像を前記表示部に表示するように構成され、
前記表示制御部は、拡大した前記第2の領域の画像を前記第1の領域の画像に対して重畳するに際し、拡大した前記第2の領域の画像が、前記第1の領域の画像において、前記自車が走行している車線に隣接する車線の前記後続車を覆わないように、拡大した前記第2の領域の画像を前記第1の領域の画像に対して重畳する、
請求項5に記載の車両用表示装置。 - 前記表示制御部は、前記後方拡大表示モードを実行する際、拡大した前記第2の領域の画像を前記第1の領域の画像に対して透過状態で重畳し、前記第2の領域の画像が重畳した前記第1の領域の画像を前記表示部に表示するように構成されている、
請求項5または6に記載の車両用表示装置。 - 渋滞多発区間を特定する渋滞多発区間情報を取得する渋滞多発区間情報取得部を更に備え、
前記表示制御部は、前記渋滞多発区間情報に基づいて、前記自車が走行している道路が渋滞多発区間であると判定した場合に、前記後方拡大表示モードを実行する、
請求項1から7のいずれか1項に記載の車両用表示装置。 - 前記後方拡大表示モードは、前記第1の領域の画像と、拡大された前記第2の領域の画像と、を前記表示部に交互に表示する、
請求項1から8のいずれか1項に記載の車両用表示装置。 - 自車の後方を撮像して得られた後方画像の第1の領域の画像を表示部に表示する後方通常表示モードと、前記後方画像の前記第1の領域よりも小さい第2の領域の画像を拡大して前記表示部に表示する後方拡大表示モードと、を選択的に実行する、車両用表示方法であって、
前記自車が走行している道路の上り勾配が増加し、
前記道路の上り勾配が増加した後に前記自車の車速の低下が検出され、
前記自車との間で隊列を構成している先行車が存在せず、且つ、
前記自車との間で隊列を構成していない後続車が存在していると判定された場合、
前記後方拡大表示モードを実行する、
車両用表示方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201680026604.0A CN107533795B (zh) | 2015-09-08 | 2016-05-26 | 车辆用显示装置以及车辆用显示方法 |
| EP16843864.6A EP3349198B1 (en) | 2015-09-08 | 2016-05-26 | Vehicular display device and vehicular display method |
| US15/915,296 US10410514B2 (en) | 2015-09-08 | 2018-03-08 | Display device for vehicle and display method for vehicle |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-176718 | 2015-09-08 | ||
| JP2015176718 | 2015-09-08 | ||
| JP2016-074015 | 2016-04-01 | ||
| JP2016074015A JP6623906B2 (ja) | 2015-09-08 | 2016-04-01 | 車両用表示装置及び車両用表示方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/915,296 Continuation US10410514B2 (en) | 2015-09-08 | 2018-03-08 | Display device for vehicle and display method for vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017042990A1 true WO2017042990A1 (ja) | 2017-03-16 |
Family
ID=58239290
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/002550 WO2017042990A1 (ja) | 2015-09-08 | 2016-05-26 | 車両用表示装置及び車両用表示方法 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2017042990A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210402994A1 (en) * | 2020-06-25 | 2021-12-30 | Hyundai Mobis Co., Ltd. | Platooning control method and system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008129772A (ja) * | 2006-11-20 | 2008-06-05 | Denso Corp | 運転支援装置 |
| JP2009043145A (ja) * | 2007-08-10 | 2009-02-26 | Clarion Co Ltd | 速度監視装置、その制御方法及び制御プログラム |
| JP2011069640A (ja) * | 2009-09-24 | 2011-04-07 | Denso Corp | 渋滞発生予防装置及び渋滞発生予防システム |
| JP2014031112A (ja) * | 2012-08-03 | 2014-02-20 | Honda Motor Co Ltd | 表示装置及び車両 |
-
2016
- 2016-05-26 WO PCT/JP2016/002550 patent/WO2017042990A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008129772A (ja) * | 2006-11-20 | 2008-06-05 | Denso Corp | 運転支援装置 |
| JP2009043145A (ja) * | 2007-08-10 | 2009-02-26 | Clarion Co Ltd | 速度監視装置、その制御方法及び制御プログラム |
| JP2011069640A (ja) * | 2009-09-24 | 2011-04-07 | Denso Corp | 渋滞発生予防装置及び渋滞発生予防システム |
| JP2014031112A (ja) * | 2012-08-03 | 2014-02-20 | Honda Motor Co Ltd | 表示装置及び車両 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210402994A1 (en) * | 2020-06-25 | 2021-12-30 | Hyundai Mobis Co., Ltd. | Platooning control method and system |
| US12091008B2 (en) * | 2020-06-25 | 2024-09-17 | Hyundai Mobis Co., Ltd. | Platooning control method and system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6623906B2 (ja) | 車両用表示装置及び車両用表示方法 | |
| JP6819431B2 (ja) | 注意喚起装置 | |
| JP6551377B2 (ja) | 車両用注意喚起装置 | |
| JP6592074B2 (ja) | 車両制御装置、車両制御方法、プログラム、および情報取得装置 | |
| US20200216063A1 (en) | Vehicle and method for controlling the same | |
| WO2019038903A1 (ja) | 周囲車両表示方法及び周囲車両表示装置 | |
| US9914446B2 (en) | Driving assistance apparatus and driving assistance method | |
| JPWO2019043847A1 (ja) | 走行制御装置、車両および走行制御方法 | |
| JP6500820B2 (ja) | 車載装置 | |
| JP6287614B2 (ja) | 車線変更支援装置及びプログラム | |
| JP2006227811A (ja) | 運転支援装置 | |
| CN109562757B (zh) | 驾驶辅助装置、驾驶辅助方法、移动体和程序 | |
| JP7053707B2 (ja) | 車両及びその制御装置 | |
| JP7409265B2 (ja) | 車載表示装置、方法およびプログラム | |
| JPWO2013118247A1 (ja) | 物体検知装置 | |
| US20230373309A1 (en) | Display control device | |
| JP2024114765A (ja) | 車両用表示装置、車両用表示システム、車両用表示方法及びプログラム | |
| JP6442921B2 (ja) | 車両用通知装置 | |
| JP2007323178A (ja) | 合流支援装置及び合流支援方法 | |
| WO2017042990A1 (ja) | 車両用表示装置及び車両用表示方法 | |
| JP6604368B2 (ja) | 車両制御装置 | |
| JP2024088483A (ja) | 車両用表示制御装置、車両用表示制御方法、及び車両用表示制御プログラム | |
| TWI755869B (zh) | 具備fcw控制裝置之傾斜車輛 | |
| JP2023045138A (ja) | 車両用表示装置、車両、表示方法及びプログラム | |
| JP2008129871A (ja) | 走行環境推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16843864 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016843864 Country of ref document: EP |