WO2017017746A1 - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- WO2017017746A1 WO2017017746A1 PCT/JP2015/071183 JP2015071183W WO2017017746A1 WO 2017017746 A1 WO2017017746 A1 WO 2017017746A1 JP 2015071183 W JP2015071183 W JP 2015071183W WO 2017017746 A1 WO2017017746 A1 WO 2017017746A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- winding
- stator
- armature
- rear direction
- motor according
- Prior art date
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/32—Windings characterised by the shape, form or construction of the insulation
- H02K3/34—Windings characterised by the shape, form or construction of the insulation between conductors or between conductor and core, e.g. slot insulation
- H02K3/345—Windings characterised by the shape, form or construction of the insulation between conductors or between conductor and core, e.g. slot insulation between conductor and core, e.g. slot insulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/12—Machines characterised by the modularity of some components
Definitions
- the present invention relates to a motor.
- Patent document 1 is provided on a substrate 3 and a positioning protrusion 4 that positions the air-core coil 1 wound with an insulated wire 10 in a ring shape into a positioning hole 14 of the substrate 3, and is positioned on the substrate 3. Terminals 13 and 15 to which line ends 5 and 6 are connected are disclosed. The winding ends 5, 6 can be soldered to the circuit of the substrate 3 (paragraphs 0016, 0019, 0020, claims 1-3, FIGS. 2, 4, 5).
- Patent Document 2 discloses a plurality of armatures 100, 101, 102 and a winding 2a wound around the armature magnetic pole teeth (paragraph 0017, FIG. 1).
- the positioning hole 14 is provided in the substrate 3, and the end portions 5 and 6 are directly connected to the substrate 3. For this reason, in a state where the substrate 3 is not at hand, it is difficult to position the plurality of air-core coils 1 or to attach the end portions 5 and 6 to the substrate 3.
- Patent Document 2 does not disclose any configuration or the like that facilitates connection between ends of the windings 2 provided in each of the plurality of armatures 100, 101, 102.
- the present invention made in view of the above circumstances is a stator in which a plurality of armatures having annular windings are fixed side by side in the front-rear direction, and attached to the stator to suppress relative movement with respect to the stator.
- a motor comprising: a movement restraining portion; and a plurality of terminal attaching portions having a conductive connector to which one end or the other end of the winding is attached.
- the perspective view of the linear motor of Example 1 The perspective view of the armature of Example 1. Exploded view of armature of Example 1 The perspective view of the coil insulation part and terminal attachment part of Example 1. The front view of the connection member of Example 1 The perspective view at the time of attaching the connection member of Example 1 to a linear motor The perspective view of the armature of Example 2. Exploded view of armature of Example 2 The perspective view of the terminal attachment part of Example 2. The perspective view of the linear motor of Example 3. The perspective view of the linear motor of Example 4. Side surface sectional drawing of the hermetic compressor of Example 5
- the various components of the present invention do not necessarily have to be independent of each other.
- a plurality of components are formed as a single member, and a single component is formed of a plurality of members. It is allowed that a certain component is a part of another component, a part of a certain component overlaps a part of another component, and the like.
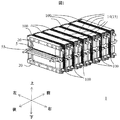
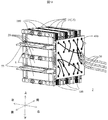
- FIG. 1 is a perspective view of the linear motor 1.
- the linear motor 1 has one or more armatures 100 arranged in the front-rear direction and a mover 55.
- a non-magnetic spacer 14 and a magnetic body 15 are located between the two armatures 100. Which of the spacer 14 and the magnetic body 15 is provided between the armatures 100 can be determined in the same manner as a known linear motor depending on the application.
- the armature 100, the spacer 14, and the magnetic body 15 arranged together in the front-rear direction are collectively referred to as a stator.
- a stator positioning portion (not shown) for positioning the armature 100, the spacer 14, and the magnetic body 15 which are constituent elements of the stator can be provided.
- the stator positioning portion for example, holes 16 are provided in the front-rear direction of the armature 100, the spacer 14, and the magnetic body 15 arranged in the front-rear direction, and an insertion portion such as a bolt that can be inserted into the hole 16 is employed. it can. Thereby, since each member which comprises a stator beforehand can be fixed easily, it becomes easy to fix the space
- another armature 100 may be opposed to each armature 100 in the vertical direction via the mover 55.
- the two armatures 100 facing each other can be arranged substantially symmetrically in the vertical direction with the movable element 55 as the center.
- the mover 55 has one or two or more flat plate-shaped permanent magnets 5.
- the permanent magnets 5 are magnetized in the vertical direction, for example, and are arranged so that the magnetization directions are alternately reversed.
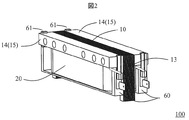
- FIG. 2 is a perspective view of the armature 100
- FIG. 3 is an exploded view of the armature 100.
- the armature 100 includes a core 10, a winding 20, a coil insulating part 30, and a terminal attachment part 60.
- the core 10 is a magnetic body and includes magnetic pole teeth 11, a back portion 12, and two iron cores 13.
- the end face of the magnetic pole tooth 11 can be made substantially perpendicular to the up-down direction, and is opposed to the mover 55 through a gap.
- the back portion 12 is an end face of the core 10 and is located on the opposite side of the mover 55 with the magnetic pole teeth 11 interposed therebetween.
- the iron core 13 is located outside the ring of the annular winding 20. In this embodiment, the iron core 13 is located on the outer side in the left-right direction with respect to the magnetic pole teeth 11 and extends in the up-down direction. The end of the iron core 13 protrudes in the vertical direction from the end face of the magnetic pole teeth 11.
- mover 55 is securable by making each of the iron core 13 contact a floor surface, for example. Further, when two armatures 100 are opposed to each other in the vertical direction, alignment can be performed by bringing the iron cores 13 of the two armatures 100 into contact with each other.
- One of the two iron cores 13 included in one armature 100 can have a convex portion, and the other can have a concave portion that can be fitted to the convex portion.
- the two armatures 100 facing each other in the vertical direction can be easily aligned by fitting the convex portions and the concave portions.
- the winding 20 is formed by forming a conducting wire in an annular shape, and is wound with the magnetic pole teeth 11 and a coil insulating portion 30 described later inside the ring.
- the ring is substantially perpendicular to the up-down direction.
- the winding 20 is formed by winding a conducting wire in a ring shape a plurality of times, and the rings are stacked in the vertical direction. Ends (one end 21 and the other end 22) of the winding 20 extend toward the outside of the ring of the winding 20.
- both the one end 21 and the other end 22 are located on the back 12 side in the up-down direction of the winding 20, and are extended to the same side in the left-right direction of the winding 20. That is, the one end 21 and the other end 22 are drawn out on the same surface side.
- the one end 21 and the other end 22 By positioning the end portion of the winding 20 on the back portion 12 side in the vertical direction, when the one end 21 and the other end 22 are electrically connected to the connecting member 40 described later, the one end 21 and the end portion near the end surface of the connecting member 40 are connected.
- the other end 22 can be easily provided.
- the one end 21 and the other end 22 can be provided in the same surface side by extending the one end 21 and the other end 22 to the same side about the left-right direction. That is, a plurality of windings 20 can be connected by providing one connection member 40 described later.
- the one end 21 and the other end 22 can be easily positioned by pulling out the one end 21 and the other end 22 in the left-right direction and arranging the armature 100, the spacer 14 and the magnetic body 15 in the front-rear direction. .
- the one end 21 and the other end 22 may be provided so as to be positioned on a diagonal line of the winding 20.
- the one end 21 may be provided on the upper right front side and the other end 22 may be provided on the lower left rear side.
- the configuration of the armature 100 can be symmetric with respect to the upside down. That is, the armature 100 can be used as a member in which the winding direction of the winding 20 is the same regardless of whether it is an upper member or a lower member of the stator. That is, the armature 100 can be effectively modularized.
- FIG. 4 is a perspective view of the coil insulating portion 30 and the terminal mounting portion 60.
- the coil insulating portion 30 is attached around the magnetic pole teeth 11 and has openings on one side or both sides in the vertical direction. That is, the coil insulating portion 30 covers the periphery of the magnetic pole teeth 11 in the front-rear direction and the left-right direction, and is located between the magnetic pole teeth 11 and the windings 20.
- the coil insulating part 30 can suppress the winding 20 from coming into contact with the magnetic pole teeth 11 and short-circuiting.
- the coil insulation part 30 and the terminal attachment part 60 are integrally formed, the attachment property with respect to the core 10 of both can be improved.
- the terminal mounting portion 60 includes two fixed portions 61 that are separated in the left-right direction, an upright portion 65 that extends in the vertical direction with respect to the fixed portion 61, and a connecting portion that connects the two fixed portions 61 via the upright portions 65. 64 and a terminal 69.
- the terminal attachment part 60 can be made into a set by fixing two arranged in the front-rear direction to one coil insulating part 30. By attaching the one end 21 and the other end 22 of the drawn winding 20 to the terminal 69 in advance, the end of the winding 20 can be positioned in advance for each armature 100 even when the connecting member 40 is not at hand. The workability of attaching to the connection member 40 can be improved.
- the terminal 69 can be freely attached to the terminal attachment portion 60. Thereby, the attachment workability
- the fixing portion 61 which is an example of the movement suppressing portion can suppress relative movement with respect to the core 10 such as dropping of the terminal mounting portion 60 from the core 10.
- the fixing portion 61 is attached to the back portion 12 of the core 10 or the spacer 14 or the magnetic body 15 adjacent to the core 10 in the front-rear direction, thereby suppressing the relative movement of the core 10 and the terminal attachment portion 60.
- the fixing portion 61 of this embodiment is in contact with the spacer 14 or the magnetic body 15 and suppresses relative movement by friction. More specifically, for example, a structure that is locked by a claw can be employed.
- the terminal attachment portion 60 can move in one side in the vertical direction or in the front-rear direction with respect to the core 10. For this reason, even if the core 10 vibrates, it can suppress that the coil insulation part 30 around which the coil
- a recess may be provided on the end face in the left-right direction of the core 10, the spacer 14, or the magnetic body 15, and the fixing portion 61 may be locked to the recess.
- the coil insulation part 30 can be effectively prevented from falling off by fixing or integrally forming the coil insulation part 30 to the terminal mounting part 60.
- the coil insulating portion 30 is formed integrally with the terminal mounting portion 60.
- the connecting portion 64 extending in the left-right direction passes between the end face of the magnetic pole teeth 11 and the mover 55 in the up-down direction. If the end of the coil insulating part 30 in the vertical direction is fixed to the connecting part 64, the coil insulating part 30 and the terminal attaching part 60 can be easily attached.
- the terminal 69 has a conductive winding connection 62 and a connector 63.
- the terminal 69 is positioned so as to be attachable to the outside in the left-right direction of the upright portion 65 located in the front-rear direction of the iron core 13.
- the terminal 69 can be easily attached to the connection member 40 described later. Further, by positioning the upright portion 65 in the front-rear direction of the iron core 13, it is possible to effectively use the space and suppress the left-right dimension of the armature 100.
- the winding connection part 62 can position the end of the winding 20 by fixing the end of the winding 20 by pinching or inserting the vicinity of the end. By attaching the winding 20 to the winding connection portion 62, it is possible to suppress the winding 20 from being bent toward the far side of the armature 100. Further, by attaching the winding 20 to the winding connecting portion 62, the attaching operation of the winding 20 to the connector 63 can be facilitated.
- the connector 63 has a surface that can be inserted into the receptacle 41 described later. For example, by forming the surface substantially perpendicular to the front-rear direction, it is possible to tolerate a positional shift in the up-down direction. As will be described later, the connector 63 makes it easy to electrically connect or disconnect the winding 20 to the connector connecting portion 42.
- the winding 20 may be wound on the surface of the connector 63, or a component capable of fixing the winding 20, for example, a hole into which the winding 20 can be inserted may be provided on the surface.
- the connector 63 is located on the outer side in the left-right direction with respect to the winding 20. Thereby, it can suppress that the connection member 40 contacts the coil
- the end portions of the windings 20 can be positioned in advance by attaching the end portions of the windings 20 to the respective connectors 63, so that the mounting workability to the connection member 40 can be improved. It can be improved. Further, the distance between the armatures 100 in the front-rear direction, that is, the distance between the connectors 63 in the front-rear direction can be easily adjusted by changing the lengths of the spacers 14 and the magnetic body 15 in the front-rear direction. Similarly, the shift in the front-rear direction between the armatures 100 can be suppressed by the stator positioning portion.
- each of the terminals 69 is provided on the opposite side of the winding 20 via the core, the attachment to the connection member 40 can be easily performed. If each of the terminals 69 is provided on the same surface, the respective windings 20 can be connected by a small number of connecting members 40.
- FIG. 5A is a front view of the connecting member 40
- FIG. 5B is an enlarged view of a part of the connecting member 40.
- the connecting member 40 includes a receptacle 41, a connector connecting portion 42, a connecting portion 43, for example, a flat plate-shaped base material 44, and a connecting wire 45.
- the connecting member 40 can be attached to the outside of the armature 100, for example, the outside in the left-right direction of the armature 100.
- the base 44 is provided on one side of the armature 100 in the left-right direction with the long side substantially parallel to the front-rear direction and the short side substantially parallel to the up-down direction.
- the connector connection part 42, the connection part 43, and the connection conducting wire 45 can be previously provided in the base material 44.
- FIG. The connector connecting part 42 and the connecting part 43 are electrically connected via a connection conducting wire 45.
- the receptacle 41 has a gap along a direction (vertical direction) parallel to the surface of the connector 63, and the connector 63 is inserted into the gap to connect the connector 63 from the surface of the base material 44 on which the connection conducting wire 45 is provided. Can be projected.
- the protruding connector 63 or the winding 20 attached to the connector 63 comes into contact with the connector connecting portion 42 that is electrically connected to the connection conductor 45.
- the terminals 69, in particular the connectors 63 can be made conductive so that the attached winding 20 is electrically connected to the connection conductor 45.
- the connection member 40 may be configured so that the receptacle 41 is conductive and the receptacle 41 and the connector connecting portion 42 are in contact with each other.
- the gap direction of the receptacle 41 is substantially parallel to the vertical direction, so that the tolerance of the position of the terminal 69 and the vertical direction of the armature 100 when the two armatures 100 are opposed to each other in the vertical direction. Can be tolerant of tolerances in the gap length in the direction.
- the receptacle 41 is located in the vicinity of the end surface of the base member 44 as viewed from the front. In this embodiment, the receptacle 41 is located in the vicinity of the long side of the end surface.
- the plurality of receptacles 41 are arranged along the long side of the substrate 44. One end 21 and the other end 22 of the winding 20 are pulled out from the back 12 side in the vertical direction, and the receptacle 41 is provided in the vicinity of the end surface, so that a wide area in the central side of the base material 44 can be used as a wiring space for the connection conductor 45. can do.
- the connector 63 By attaching the connector 63 to the receptacle 41, the winding 20 can be easily guided or positioned.
- the winding 20 can be easily electrically connected to the connector connecting portion 42 arranged in the vicinity of the receptacle 41.
- the connector connecting portion 42 can be provided in the vicinity of the center side of the base material 44 with respect to the receptacle 41, that is, in the vicinity of the vertical direction. Moreover, the workability of the connection can be improved, and the replacement work of the connection member 40 can be easily performed.
- each of the armatures 100 constituting the stator is positioned by the stator positioning portion described above, and since the end of the winding 20 is attached to the connector 63, each end of the winding 20 is fixed.
- the part can be positioned.
- various types of connection members 40 can be manufactured in advance by designing the positional relationship of the plurality of receptacles 41 provided on the connection member 40 according to the distance between the ends of the winding 20. . In other words, the connection relationship of the winding 20 can be easily changed by replacing the connection member 40.
- a part or all of the receptacle 41 may be opened on one side in the vertical direction so that the connector 63 can protrude. Thereby, even if the connector 63 is displaced in the vertical direction due to tolerance or the like, it can be easily attached to the receptacle 41. Further, a part or all of the receptacle 41 may be closed on the upper side. In this way, the base member 44 can be supported by the connector 63.
- the connecting portion 43 is located in the vicinity of the short side of the base material 44.
- the connecting portion 43 can be provided with a connecting wire 50 to be described later.
- the connecting conductor 50 can be electrically connected to, for example, a power source (not shown), another base material 44 or the linear motor 1.
- connection wire 45 electrically connects two or more of the connector connecting portion 42 or the connecting portion 43. Since the winding 20 and the connecting conductor 50 are electrically connected to the connector connecting portion 42 and the connecting portion 43, the connecting conductor 45 is arranged on the base 44 according to the connection design of the winding 20 and the connecting conductor 50. Thus, the connection members 40 can be attached to each other easily and electrically. Moreover, if it replaces
- the base material 44 can employ
- the connection conductor 45 and the connection conductor 50 can employ various known configurations that can be employed as a conductor, such as an etched printed copper wiring or a coated copper wire.
- FIG. 6 is a perspective view when the connecting member 40 is attached to the left and right direction sides of the linear motor 1.
- the receptacle 41 is provided on the armature 100 side surface (the surface opposite to the surface of the connection member 40 shown in FIG. 6).
- a power source (not shown) or a connecting conductor 50 that is electrically connected to another stator can be provided in the connecting portion 43. Accordingly, it is possible to easily meet a demand for creating the linear motor 1 using the armatures 100 that are larger than the number of armatures 100 that can be connected by one connection member 40.
- Example 2 will be described.
- the configuration of the second embodiment can be the same as that of the first embodiment except for the following points.
- 7 is a perspective view of the armature 1000
- FIG. 8 is an exploded view of the armature 1000
- FIG. 9 is a perspective view of the terminal attachment portion 60.
- the coil insulation part 30 of the present embodiment has a separate structure from the terminal attachment part 60. Thereby, it becomes easy to make the coil insulation part 30 thin, for example, it is possible to use insulating paper provided around the magnetic pole teeth 11. Moreover, it becomes easy to move the terminal attachment part 60 to the front-back direction, and position adjustment becomes easy.
- the terminal mounting portion 60 has an insulating connecting portion 64 that is located on the outer side in the front-rear direction of the winding 20 and extends in the left-right direction.
- the connecting portion 64 serves as a so-called interphase insulating material, thereby improving the insulation in the front-rear direction of the winding 20.
- the armatures 1000 are arranged in the front-rear direction, the windings of the respective armatures 1000 are provided. It can suppress that the wire
- the terminal attaching part 60 is opened in the up-down direction.
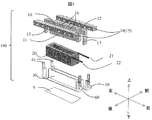
- FIG. 10 is a perspective view of the linear motor 2 in which a plurality of stators are arranged in the vertical direction.
- a plurality of stators according to the present embodiment are arranged in the vertical direction.
- the connection member 400 can electrically connect the armatures 100 belonging to at least two stators. That is, the connection member 40 illustrated in the first embodiment includes the armatures 100 arranged in the front-rear direction belonging to one stator and the armatures 100 provided substantially symmetrically in the vertical direction with the movable element 55 as the center. Were electrically connected.
- the connection members 400 of the present embodiment are arranged in the vertical direction, and the armatures 100 belonging to different stators can be electrically connected. Thereby, it is possible to easily drive the movable elements 55 corresponding to the respective stators in synchronization.
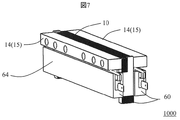
- FIG. 11 is a perspective view of the linear motor 3 in which the stator is provided only in the upward direction of the mover 55.
- the stator of the present embodiment is a one-side magnetic flux linear motor in which a plurality of armatures 100 are arranged in the upward direction of the mover 55.
- the connection member 4000 can electrically connect the armatures 100 arranged in the front-rear direction. That is, the connection member 40 illustrated in the first embodiment includes the armatures 100 arranged in the front-rear direction belonging to one stator and the armatures 100 provided substantially symmetrically in the vertical direction with the movable element 55 as the center. Were electrically connected.
- the connection member 4000 of this embodiment can also electrically connect the armatures 100 of the one-side magnetic flux linear motors arranged in a line in the front-rear direction.
- Example 5 relates to a compressor which is an example of a device on which a linear motor is mounted.
- FIG. 12 is a side sectional view of the hermetic compressor 250.
- the hermetic compressor 250 includes the linear motor 1 as the electric element 230.
- the hermetic compressor 250 is a reciprocating compressor in which the compression element 220 and the electric element 230 are disposed in the hermetic container 203.
- the compression element 220 and the electric element 230 are elastically supported in the sealed container 203 by a support spring 249.
- the compression element 220 includes a cylinder block 201 having a cylinder 201a in which the piston 204 reciprocates, a cylinder head 216 assembled to the end face of the cylinder block 201, and a head cover 217 forming a discharge chamber space.
- the working fluid supplied into the cylinder 201 a is compressed by the reciprocating motion of the piston 204, and the compressed working fluid is sent to a discharge pipe communicating with the outside of the hermetic compressor 250.
- the linear motor 1 can have, for example, a multiple of 3, for example, 12 armatures. Thereby, three-phase driving is possible.
- a magnetic material 15 is inserted between the armatures 100 of the same phase, and a non-magnetic spacer 14 is inserted between the armatures 100 of the different phase.
- connection conductors 45 are arranged so that currents of the same phase flow through the four armatures 100 each.
- the mover 55 is connected to a resonance spring 223 which is an example of an elastic body.
- a resonance spring 223 which is an example of an elastic body.
- Pistons 204 are attached to both ends of the mover 55 in the front-rear direction. Therefore, the reaction at the time of compressing the working fluid in the cylinder 201a can be used for the reciprocating motion of the mover 55 as a restoring force. Further, the electromagnetic force acts between the magnetic pole 11 and the permanent magnet 5, so that the mover 55 receives a vertical force directed toward the magnetic pole teeth 11. Since the mover 55 is fixed on the central axis of the cylinder 201a into which each piston is inserted, the mover 55 is supported at both ends. For this reason, contact with the magnetic pole teeth 11 can be suppressed.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Insulation, Fastening Of Motor, Generator Windings (AREA)
- Linear Motors (AREA)
Abstract
Description
説明のため、互いに直交する上下方向、左右方向、前後方向という語を用いる。重力方向は必ずしも上下方向に平行でなくともよく、上下方向、左右方向、前後方向又はそれ以外の方向と平行にできる。
[リニアモータ1]
図1は、リニアモータ1の斜視図である。リニアモータ1は、前後方向に並んだ1つ又は2つ以上の電機子100と、可動子55を有する。2つの電機子100の間には、非磁性体のスペーサ14や磁性体15が位置している。電機子100のそれぞれの間に、スペーサ14と磁性体15のいずれを設けるかは、用途に応じて公知のリニアモータと同様にできる。以下、図1に例示するように、前後方向に纏まって並んだ電機子100、スペーサ14及び磁性体15を総称して固定子という。
図2は電機子100の斜視図、図3は電機子100の分解図である。電機子100は、コア10、巻線20、コイル絶縁部30、端子取付部60を有する。
コア10は磁性体であり、磁極歯11と、背部12と、2つの鉄心13とを有する。
磁極歯11の端面は上下方向に略垂直にでき、可動子55に対して空隙を介して対向している。
背部12はコア10の端面であり、磁極歯11を挟んで、可動子55と反対側に位置している。
鉄心13は環状の巻線20の環の外側に位置している。本実施例では、鉄心13は磁極歯11に対して左右方向の外側それぞれに位置し、上下方向に延びている。鉄心13の端部は、磁極歯11の端面よりも上下方向に突出している。このため、電機子100を1つ上下方向に配置する際は、鉄心13のそれぞれを例えば床面に接触させることで、可動子55を配する空隙を確保できる。また、電機子100を2つ上下方向に対向させる際は、2つの電機子100の鉄心13をそれぞれ接触させることで位置合わせができる。
図4はコイル絶縁部30及び端子取付部60の斜視図である。
コイル絶縁部30は磁極歯11周囲に取付けられており、また、上下方向の片側又は両側に開口を有している。すなわち、コイル絶縁部30は磁極歯11の前後方向及び左右方向の周囲を覆い、磁極歯11と巻線20の間に位置している。コイル絶縁部30により、巻線20が磁極歯11に接触して短絡することを抑制できる。なお、コイル絶縁部30と端子取付部60を一体形成しておけば、両者のコア10に対する取付性を向上できる。
引き出した巻線20の一端21や他端22を予め端子69に取付けることで、それぞれの電機子100について、結線部材40が手元にない状態でも予め巻線20の端部を位置決めすることができ、結線部材40への取付け作業性を高めることができる。
端子69は端子取付部60に取付自在である。これにより、端子69への巻線20の端部の取付作業性を高めることができる。
なお、コア10又はスペーサ14若しくは磁性体15の左右方向端面に凹部を設け、固定部61をこの凹部に係止させてもよい。
図5(a)は結線部材40の正面図、図5(b)は結線部材40の一部を拡大した図である。結線部材40は、レセプタクル41、コネクタ接続部42、連絡部43、例えば平板形状の基材44、結線導線45を有する。結線部材40は、電機子100の外側、例えば電機子100の左右方向外側に取付けることができる。本実施例では、長辺を前後方向と略平行に、短辺を上下方向と略平行にして、電機子100の左右方向の一方側に基材44を設けている。なお、コネクタ接続部42、連絡部43及び結線導線45は、予め基材44に設けておくことができる。コネクタ接続部42と連絡部43は、結線導線45を介して電気的に接続している。
レセプタクル41は、コネクタ63の面に平行な方向(上下方向)に沿った空隙を有しており、この空隙にコネクタ63を挿通させて、結線導線45を設けた基材44の面からコネクタ63を突出させられる。突出したコネクタ63又はコネクタ63に取付けた巻線20は、結線導線45と電気的に接続したコネクタ接続部42に接触する。端子69、特にコネクタ63は導電性にしておくことができ、これにより、取付けてある巻線20は結線導線45に電気的に接続する。レセプタクル41を導電性にし、レセプタクル41とコネクタ接続部42が接触するように結線部材40を構成しておいてもよい。
レセプタクル41にコネクタ63を取付けることで、巻線20を容易に案内したり位置決めできる。これにより、レセプタクル41近傍に配したコネクタ接続部42に巻線20を容易に電気的に接続できる。コネクタ接続部42は、レセプタクル41に対して基材44の中央側の近傍、すなわち上下方向近傍に設けることができる。また、接続の作業性を高めることができるとともに、結線部材40の交換作業を容易に行うことができる。
連絡部43は、基材44の短辺近傍に位置している。連絡部43には、後述する連絡導線50を配することができる。連絡導線50は、例えば、不図示の電源、他の基材44又はリニアモータ1に電気的に接続できる。
結線導線45は、コネクタ接続部42又は連絡部43の2つ又は3つ以上を電気的に接続している。巻線20や連絡導線50がコネクタ接続部42や連絡部43に電気的に接続しているため、巻線20や連絡導線50の結線の設計に応じて基材44に結線導線45を配しておくことで、結線部材40の取付により、互いを容易に電気的に接続できる。また、結線導線45のレイアウトが異なる結線部材40に交換すれば、容易に電機子100同士の結線関係を変更できる。
図6は、結線部材40をリニアモータ1の左右方向側に取付けた場合の斜視図である。レセプタクル41は、電機子100側の面(図6で示されている結線部材40の面の反対側の面)に設けられている。連絡部43には、例えば不図示の電源や、他の固定子に電気的に接続する連絡導線50を設けることができる。これにより、1つの結線部材40で結線可能な電機子100の個数より多い電機子100を用いてリニアモータ1を作成したいなどの要求にも容易に応えることができる。
図7は電機子1000の斜視図、図8は電機子1000の分解図、図9は端子取付部60の斜視図である。
端子取付部60は、巻線20の前後方向外側に位置し、左右方向に延在する絶縁性の連結部64を有している。この連結部64はいわゆる相間絶縁材の役割を果たし、これにより、巻線20の前後方向の絶縁性を高めることができ、電機子1000を前後方向に並べる際、それぞれの電機子1000が有する巻線20が接触して短絡することを抑制できる。このため、巻線20の巻き数や占積率を大きくできる。なお、端子取付部60は上下方向に開口している。
本実施例の固定子は上下方向に複数個が並んでいる。結線部材400は、少なくとも2つの固定子それぞれに属する電機子100同士を電気的に接続できる。すなわち、実施例1で例示した結線部材40は、1つの固定子に属している前後方向に並んだ電機子100や、可動子55を中心にして上下方向に略対称に設けられた電機子100を電気的に接続した。本実施例の結線部材400は、上下方向に並んでおり、互いに異なる固定子に属する電機子100同士も電気的に接続できる。これにより、それぞれの固定子に対応する可動子55を同期して駆動させることを容易にできる。
本実施例の固定子は可動子55の上方向に複数個の電機子100が並んだ、片側磁束リニアモータである。結線部材4000は、前後方向に並んだ電機子100同士を電気的に接続できる。すなわち、実施例1で例示した結線部材40は、1つの固定子に属している前後方向に並んだ電機子100や、可動子55を中心にして上下方向に略対称に設けられた電機子100を電気的に接続した。本実施例の結線部材4000は、前後方向に一列に並んだ片側磁束リニアモータの電機子100同士も電気的に接続できる。
10…コア
11…磁極歯
12…背部
13…鉄心
14…スペーサ
15…磁性体
16…孔
20…巻線
21…巻線の一端
22…巻線の他端
30…コイル絶縁部
31…相間絶縁部
40,400,4000…結線部材
41…レセプタクル
42…コネクタ接続部
43…連絡部
44…基材
45…結線導線
55…可動子
60…端子取付部
61…移動抑制部(固定部、爪)
62…巻線接続部
63…コネクタ
64…連結部
65…直立部
69…端子
100,1000…電機子
250…密閉型圧縮機
Claims (9)
- 環状の巻線を有する複数の電機子が前後方向に並んで固定された固定子と、
該固定子に取付けられて該固定子に対する相対移動を抑制する移動抑制部、及び前記巻線の一端又は他端が取付けられた導電性のコネクタ、を有する複数の端子取付部と、を備えることを特徴とするモータ。 - 前記固定子に含まれる前記電機子の一部又は全部は、
前記環が、上下方向に略垂直であり、
前記環の内側に設けた磁性体の磁極歯と、該磁極歯の上下方向に設けた背部と、を有するコアを備え、
前記巻線の一端又は他端それぞれが、前記環の外側に位置する前記コネクタに取付けられていることを特徴とする請求項1に記載のモータ。 - 前記固定子は、磁性体及び/又は非磁性体のスペーサを前記電機子の前後方向の間に有しており、
前記端子取付部の一部又は全部は、
2つの前記移動抑制部と、2つの該移動抑制部それぞれを一端に有する直立部と、該直立部の他端同士を繋ぐ絶縁性の連結部と、を備え、
前記移動抑制部が、前記背部、前記磁性体又は前記スペーサに係止する固定部を有し、
前記連結部が、前後方向で隣接する2つの前記巻線の間に位置することを特徴とする請求項1に記載のモータ。 - 前記固定子は、磁性体及び/又は非磁性体のスペーサを前記電機子の前後方向の間に有しており、
前記端子取付部の一部又は全部は、
2つの前記移動抑制部と、2つの該移動抑制部それぞれを一端に有する直立部と、該直立部の他端同士を繋ぐ絶縁性の連結部と、を備え、
前記巻線及び前記磁極歯の間に設けたコイル絶縁部を備え、
該コイル絶縁部と当該端子取付部とが一体であることを特徴とする請求項1に記載のモータ。 - 前記電機子の一部又は全部は、
前記巻線の一端及び他端が、同一面側に引き出されていることを特徴とする請求項2に記載のモータ。 - 前記電機子の一部又は全部は、
前記コアが、上下方向に延在するとともに凸部を有する鉄心と、該凸部に嵌合可能な凹部を有する別の鉄心と、を有し、
前記巻線の一端及び他端が、互いに略対角する位置に引き出されていることを特徴とする請求項2に記載のモータ。 - 基材と、該基材に設けられ前記コネクタを取付可能な複数のレセプタクルと、該レセプタクルに挿入された前記コネクタ同士を電気的に接続する結線導線と、を有する結線部材を備えることを特徴とする請求項1乃至6何れか一項に記載のモータ。
- 前記コネクタの一部又は全部は、前後方向に略垂直な面を有し、
前記レセプタクルの一部又は全部は、上下方向に沿った空隙を有することを特徴とする請求項7に記載のモータ。 - 前記レセプタクルの一部又は全部は、前記基材の正面視における端面の近傍に位置し、
前記基材の中央側の領域に前記結線導線を配したことを特徴とする請求項7に記載のモータ。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE112015006660.8T DE112015006660T5 (de) | 2015-07-27 | 2015-07-27 | Motor |
| PCT/JP2015/071183 WO2017017746A1 (ja) | 2015-07-27 | 2015-07-27 | モータ |
| JP2017530488A JP6500106B2 (ja) | 2015-07-27 | 2015-07-27 | モータ |
| CN201580081671.8A CN107836071B (zh) | 2015-07-27 | 2015-07-27 | 电机 |
| TW105122907A TWI606673B (zh) | 2015-07-27 | 2016-07-20 | motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/071183 WO2017017746A1 (ja) | 2015-07-27 | 2015-07-27 | モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017017746A1 true WO2017017746A1 (ja) | 2017-02-02 |
Family
ID=57884308
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/071183 WO2017017746A1 (ja) | 2015-07-27 | 2015-07-27 | モータ |
Country Status (5)
| Country | Link |
|---|---|
| JP (1) | JP6500106B2 (ja) |
| CN (1) | CN107836071B (ja) |
| DE (1) | DE112015006660T5 (ja) |
| TW (1) | TWI606673B (ja) |
| WO (1) | WO2017017746A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI636640B (zh) * | 2017-12-26 | 2018-09-21 | 群光電能科技股份有限公司 | 馬達定子結線固定裝置 |
| WO2024171540A1 (ja) * | 2023-02-17 | 2024-08-22 | 日本トムソン株式会社 | 揺動テーブル |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI715966B (zh) * | 2019-04-12 | 2021-01-11 | 直得科技股份有限公司 | 線性馬達構造 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6287409U (ja) * | 1985-11-21 | 1987-06-04 | ||
| JP2001268885A (ja) * | 2000-03-17 | 2001-09-28 | Matsushita Electric Works Ltd | リニアモータ |
| JP2010187434A (ja) * | 2009-02-10 | 2010-08-26 | Minebea Co Ltd | モータ |
| WO2010103575A1 (ja) * | 2009-03-13 | 2010-09-16 | 株式会社日立製作所 | リニアモータ |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014064785A1 (ja) * | 2012-10-24 | 2014-05-01 | 株式会社日立製作所 | リニアモータ及びリニアモータ駆動システム |
-
2015
- 2015-07-27 JP JP2017530488A patent/JP6500106B2/ja active Active
- 2015-07-27 WO PCT/JP2015/071183 patent/WO2017017746A1/ja active Application Filing
- 2015-07-27 DE DE112015006660.8T patent/DE112015006660T5/de active Pending
- 2015-07-27 CN CN201580081671.8A patent/CN107836071B/zh active Active
-
2016
- 2016-07-20 TW TW105122907A patent/TWI606673B/zh active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6287409U (ja) * | 1985-11-21 | 1987-06-04 | ||
| JP2001268885A (ja) * | 2000-03-17 | 2001-09-28 | Matsushita Electric Works Ltd | リニアモータ |
| JP2010187434A (ja) * | 2009-02-10 | 2010-08-26 | Minebea Co Ltd | モータ |
| WO2010103575A1 (ja) * | 2009-03-13 | 2010-09-16 | 株式会社日立製作所 | リニアモータ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI636640B (zh) * | 2017-12-26 | 2018-09-21 | 群光電能科技股份有限公司 | 馬達定子結線固定裝置 |
| WO2024171540A1 (ja) * | 2023-02-17 | 2024-08-22 | 日本トムソン株式会社 | 揺動テーブル |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107836071A (zh) | 2018-03-23 |
| CN107836071B (zh) | 2019-11-01 |
| DE112015006660T5 (de) | 2018-03-08 |
| TW201705652A (zh) | 2017-02-01 |
| JPWO2017017746A1 (ja) | 2018-02-01 |
| JP6500106B2 (ja) | 2019-04-10 |
| TWI606673B (zh) | 2017-11-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5838920B2 (ja) | 継電器 | |
| EP2264872B1 (en) | Dc motor | |
| US8536742B2 (en) | Linear synchronous motor | |
| US20170250580A1 (en) | Stator of planar type motor, and planar type motor using same | |
| JP5991778B2 (ja) | 電磁継電器 | |
| KR100320217B1 (ko) | 리니어 모터의 고정자 떨림 방지구조 | |
| JP6248433B2 (ja) | モータ | |
| US11996735B2 (en) | Motor | |
| JP6500106B2 (ja) | モータ | |
| TW200941900A (en) | Coil unit for three-phase linear motor and the three-phase linear motor | |
| JP4470168B2 (ja) | 密閉形電動圧縮機 | |
| CN110556997A (zh) | 一种单相无刷高速电机 | |
| US10204756B2 (en) | Coil terminal and electromagnetic relay provided therewith | |
| CN210669836U (zh) | 一种线圈内嵌套铁芯的线性振动马达 | |
| JP7542172B2 (ja) | 電動機 | |
| WO2023119801A1 (ja) | 電動機及び端子 | |
| CN211063511U (zh) | 一种单相无刷高速电机 | |
| JP2002095232A (ja) | リニアモータの電機子構造 | |
| JP2022167013A (ja) | 回転子および電動機 | |
| JP2699156B2 (ja) | 小型直流モータ | |
| US9899784B2 (en) | Motor | |
| JPWO2021084855A5 (ja) | ||
| JP2024113574A (ja) | 振動発生装置 | |
| KR20010026154A (ko) | 리니어 모터의 고정자 충돌 방지구조 | |
| JP2024113573A (ja) | 振動発生装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15899580 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017530488 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112015006660 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15899580 Country of ref document: EP Kind code of ref document: A1 |