WO2016111055A1 - 超音波プローブ - Google Patents
超音波プローブ Download PDFInfo
- Publication number
- WO2016111055A1 WO2016111055A1 PCT/JP2015/076188 JP2015076188W WO2016111055A1 WO 2016111055 A1 WO2016111055 A1 WO 2016111055A1 JP 2015076188 W JP2015076188 W JP 2015076188W WO 2016111055 A1 WO2016111055 A1 WO 2016111055A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- curved
- longitudinal axis
- vibration
- extending
- ultrasonic probe
- Prior art date
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/1662—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans for particular parts of the body
- A61B17/1684—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans for particular parts of the body for the shoulder
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/1659—Surgical rasps, files, planes, or scrapers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
- A61B17/32002—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes with continuously rotating, oscillating or reciprocating cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320004—Surgical cutting instruments abrasive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320004—Surgical cutting instruments abrasive
- A61B2017/320008—Scrapers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320052—Guides for cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
- A61B2017/320073—Working tips with special features, e.g. extending parts probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
- A61B2017/320078—Tissue manipulating surface
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320089—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic node location
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N2007/0043—Ultrasound therapy intra-cavitary
Definitions
- the present invention relates to an ultrasonic probe for cutting, for example, bone tissue and cartilage tissue by ultrasonic vibration.
- Patent Document 1 discloses an ultrasonic treatment apparatus including an ultrasonic probe (ultrasonic horn).
- ultrasonic vibration generated by the vibration generating unit (ultrasonic vibration mechanism) is transmitted from the proximal end side to the distal end side in the ultrasonic probe.
- a knife portion is formed as a treatment surface at the tip of the ultrasonic probe.
- the outer surface of the ultrasonic probe is formed in an uneven shape.
- ultrasonic treatment is transmitted to the knife portion, thereby cutting the treatment target (for example, bone or other hard tissue).
- a hard tissue such as a bone may be cut in a narrow space such as a joint cavity under observation with an endoscope (rigid endoscope).
- an endoscope rigid endoscope
- it is required to appropriately contact the treatment surface (cutting surface) of the ultrasonic probe with the bone even in a narrow space such as a joint cavity.
- a hard tissue such as a bone with an appropriate strength.
- the present invention has been made to solve the above-described problems, and an object of the present invention is to provide an ultrasonic probe in which a cutting surface is easily brought into contact with a hard tissue even in a narrow space and the hard tissue is appropriately cut. There is to do.
- an ultrasonic probe for the shoulder joint that transmits the ultrasonic vibration is extended along a longitudinal axis.
- a probe main body for transmitting the ultrasonic vibration from the proximal end side to the distal end side, and a first direction that is provided on the distal end side with respect to the probe main body portion and intersects the longitudinal axis In this case, a curved extending portion extending in a state of bending toward the first intersecting direction with respect to the probe main body, and a first facing the first intersecting direction side in the curved extending portion.
- a third curved outer surface facing the first width direction side in the curved extending portion when the two directions perpendicular to the direction are defined as a first width direction and a second width direction, and the curved extending portion
- a second curved outer surface facing the second width direction side, and a plurality of grooves on the second curved outer surface, and a treatment target is cut, and the first width direction and the second width
- the first cutting surface formed in an arc shape centered on the first intersecting direction side from the curved extending portion and the third curved outer surface are formed.
- the second cutting surface including a first extending groove that cuts the treatment target and extends along the thickness direction of the curved extending portion, and the fourth curved outer surface.
- the treatment target is cut and formed along the thickness direction of the curved extending portion.
- a third cutting surface having two extending grooves, and extending to the first cutting surface, one end continuous with the first extending groove, and the other end continuous with the second extending groove.
- a relay groove is
- an ultrasonic probe in which a cutting surface is easily brought into contact with a hard tissue even in a narrow space and the hard tissue is appropriately cut.
- FIG. 6 is a sectional view taken along line VI-VI in FIG. 5.
- FIG. 1 is a diagram showing an ultrasonic treatment system 1 of the present embodiment.
- the ultrasonic treatment system 1 includes an ultrasonic treatment instrument (handpiece) 2, an energy control device 3, and a transducer unit 5.
- the ultrasonic treatment instrument 2 has a longitudinal axis C.
- a direction parallel to the longitudinal axis C is defined as a longitudinal axis direction.
- One side in the longitudinal axis direction is the tip side (arrow C1 side in FIG. 1), and the side opposite to the tip side is the base side (arrow C2 side in FIG. 1).
- the ultrasonic treatment instrument 2 includes a holding unit 6, a sheath 7, and an ultrasonic probe 8.
- the holding unit 6 includes a holding casing 11 held by an operator and an energy operation button 12 which is attached to the holding casing 11 and is an energy operation input unit for an operator to operate.
- An ultrasonic probe (vibration transmission member) 8 is inserted into the sheath 7. Note that the distal end portion of the ultrasonic probe 8 protrudes from the distal end of the sheath 7 toward the distal end side.
- the vibrator unit 5 having the vibrator case 13 is connected to the proximal end side of the holding unit 6.
- One end of a cable 15 is connected to the vibrator unit 5.
- the other end of the cable 15 is connected to the energy control device 3.
- the energy control device 3 includes a power source, a conversion circuit that converts power from the power source into vibration-generated power, a processor (control unit) including a CPU (Central Processing Unit) or an ASIC (application specific integrated circuit), a memory, and the like.
- a storage medium Inside the holding casing 11, a switch (not shown) whose opening / closing state is changed by an input of an energy operation with the energy operation button 12 is provided.
- the switch is electrically connected to the processor of the energy control device 3 through a signal path extending through the vibrator unit 5 and the cable 15.
- the vibrating body unit 20 extends through the inside of the holding casing 11 and the inside of the vibrator case 13.
- FIG. 2 is a diagram showing the configuration of the vibrating body unit 20.
- the vibrating body unit 20 includes the above-described ultrasonic probe 8, an ultrasonic transducer 21 including a plurality of piezoelectric elements that are vibration generating units, and a relay transmission member 22.
- the ultrasonic transducer 21 and the relay transmission member 22 are disposed inside the transducer case 13, and the relay transmission member 22 is supported by the transducer case 13.
- the ultrasonic transducer 21 is attached to the relay transmission member 22.
- the ultrasonic probe 8 is connected to the distal end side of the relay transmission member 22 inside the holding casing 11.
- the relay transmission member 22 is provided with a cross-sectional area changing portion 23 in which a cross-sectional area perpendicular to the longitudinal axis C decreases toward the tip side.
- the cross-sectional area changing part (horn part) 23 is located on the tip side from the ultrasonic transducer 21.
- One end of the electrical wirings 25A and 25B is connected to the ultrasonic transducer 21.
- the electrical wirings 25 ⁇ / b> A and 25 ⁇ / b> B are extended through the inside of the cable 15 and the other ends are connected to the energy control device 3.
- the control unit controls the conversion circuit, and generates vibration generation power (vibration generation current) through the electric wires 25 ⁇ / b> A and 25 ⁇ / b> B.
- the ultrasonic transducer 21 is supplied. Thereby, ultrasonic vibration is generated in the ultrasonic transducer 21, and the generated ultrasonic vibration is transmitted to the ultrasonic probe 8 via the relay transmission member 22. At this time, the amplitude of the ultrasonic vibration is enlarged at the cross-sectional area changing portion 23 of the relay transmission member 22.
- the ultrasonic probe 8 includes a probe main body 31 that extends along the longitudinal axis C.
- the probe main body 31 extends substantially straight with the longitudinal axis C as the axis center.
- An engagement connecting portion 32 is provided on the proximal end side of the probe main body portion 31.
- an engagement groove (not shown) provided in the relay transmission member 22 (for example, by screwing a female screw and a male screw)
- a probe is connected to the distal end side of the relay transmission member 22.
- the main body 31 is connected.
- the contact surface 33 formed at the proximal end of the probe main body 31 contacts the relay transmission member 22. Ultrasonic vibration is transmitted from the relay transmission member 22 to the probe main body 31 through the contact surface 33.
- the ultrasonic vibration When the ultrasonic vibration is transmitted to the probe main body 31, the ultrasonic vibration is transmitted from the proximal end side to the distal end side in the probe main body portion 31 (ultrasonic probe 8).
- the vibrating body unit 20 performs longitudinal vibration in which the vibration direction is parallel to the longitudinal axis direction in a specified frequency range including a specified frequency.
- a vibration antinode (most proximal vibration antinode) A1 which is one of the vibration antinodes of the longitudinal vibration is located at the base end of the vibration body unit 20 (base end of the relay transmission member 22).
- a vibration antinode (most advanced vibration antinode) A2 which is one of the vibration antinodes of longitudinal vibration, is located at the tip (tip of the ultrasonic probe 8).
- the vibration antinode A1 is located on the most proximal side among the vibration antinodes of the longitudinal vibration
- the vibration antinode A2 is located on the most distal side among the vibration antinodes of the vertical vibration.
- the vibrating body unit 20 is designed to perform longitudinal vibration at 47 kHz (specified frequency) by transmitting ultrasonic vibration, and actually, a frequency range of 46 kHz to 48 kHz (specified frequency). Range).
- the ultrasonic probe 8 has a total length L1 from the distal end to the proximal end (the proximal end of the engagement connecting portion 32) in the longitudinal axis direction. In one embodiment, the total length L1 is 183.4 mm.
- the ultrasonic probe 8 has a longitudinal dimension L2 from the distal end to the contact surface 33 (the base end of the probe main body 31) in the longitudinal axis direction. In one embodiment, the longitudinal dimension L2 is preferably 177.5 mm.
- the probe main body portion 31 is provided with a horn portion (first horn portion) 35.
- the cross-sectional area perpendicular to the longitudinal axis C decreases toward the tip side.
- the horn part (cross-sectional area reduction part) 35 is located on the distal end side with respect to the contact surface 33, and the probe main body part 31 extends from the contact surface 33 to the base end (vibration input end) E1 of the horn part 35 in the longitudinal axis direction. It has a longitudinal dimension L3.
- the longitudinal dimension L3 is preferably 29 mm.
- the horn part (first horn part) 35 has a horn longitudinal dimension (first horn longitudinal dimension) L4 from the base end (vibration input end) E1 to the tip end (vibration output end) E2 in the longitudinal axis direction.
- the horn longitudinal dimension L4 is preferably 20 mm.
- the outer diameter of the probe main body portion 31 is kept substantially constant from the contact surface 33 to the proximal end E1 of the horn portion 35 in the longitudinal axis direction. Therefore, the probe main body portion 31 has an outer diameter D1 at the contact surface 33 and the proximal end E1 of the horn portion 35. In an embodiment, the outer diameter D1 is preferably 7 mm. Further, since the horn portion 35 has a cross-sectional area that decreases toward the distal end side, the probe main body portion 31 has an outer diameter D2 smaller than the outer diameter D1 at the distal end E2 of the horn portion 35. That is, in the horn part 35, the outer diameter of the probe main body part 31 decreases from the outer diameter D1 to the outer diameter D2 toward the distal end side. In an embodiment, the outer diameter D2 is preferably 3.8 mm.
- the vibration node N1 which is one of the vibration nodes of the longitudinal vibration is the proximal end E1 of the horn portion 35 or the vicinity of the proximal end E1.
- the vibration antinodes of the longitudinal vibration are located away from the horn portion 35 in the longitudinal axis direction. For this reason, in the horn part 35 whose cross-sectional area decreases toward the tip side, the amplitude of longitudinal vibration (ultrasonic vibration) is expanded.
- longitudinal vibration having an amplitude of 18 ⁇ m at the vibration antinode is transmitted to the base end E1 of the horn part 35, and the amplitude of the longitudinal vibration is expanded by the horn part 35.
- the vibration node N1 is located at the proximal end E1 of the horn portion 35 in a state where the vibrating body unit 20 vibrates longitudinally at a specified frequency (eg, 47 kHz) included in the specified frequency range.
- the probe main body portion 31 is provided with a horn portion (second horn portion) 36.
- the cross-sectional area perpendicular to the longitudinal axis C decreases toward the tip side.
- the horn part (cross-sectional area decreasing part) 36 is located on the distal end side from the horn part (first horn part) 35, and the probe main body part 31 extends from the contact surface 33 to the base end (
- the vibration input end) has a longitudinal dimension L5 up to E3.
- the longitudinal dimension L5 is preferably 88.1 mm.
- the horn part (second horn part) 36 has a horn longitudinal dimension (second horn longitudinal dimension) L6 from the base end (vibration input end) E3 to the distal end (vibration output end) E4 in the longitudinal axis direction.
- the horn longitudinal dimension L6 is preferably 14 mm.
- the probe body 31 has a substantially constant outer diameter from the distal end E2 of the horn portion (first horn portion) 35 to the proximal end E3 of the horn portion (second horn portion) 36 in the longitudinal axis direction. Therefore, the probe main body 31 has an outer diameter D2 at the proximal end E3 of the horn portion 36. That is, at the distal end E2 of the horn portion 35 and the proximal end E3 of the horn portion 36, the outer diameter of the probe main body portion 31 is the outer diameter D2, which is substantially the same size.
- the probe main body portion 31 has an outer diameter D3 smaller than the outer diameter D2 at the tip E4 of the horn portion 36. That is, in the horn part 36, the outer diameter of the probe main body part 31 decreases from the outer diameter D2 to the outer diameter D3 toward the distal end side.
- the outer diameter D3 is preferably 2.7 mm.
- the vibration node N2 that is one of the vibration nodes of the longitudinal vibration is the proximal end E3 of the horn portion 36 or the vicinity of the proximal end E3.
- the vibration antinodes of the longitudinal vibration are located away from the horn portion 36 in the longitudinal direction. For this reason, in the horn part 36 whose cross-sectional area decreases toward the tip side, the amplitude of longitudinal vibration (ultrasonic vibration) is increased.
- the vibration node N2 is located at the proximal end E3 of the horn portion 36 in a state where the vibrating body unit 20 vibrates longitudinally at a specified frequency (eg, 47 kHz) included in the specified frequency range. In addition, in a state where the vibrating body unit 20 vibrates longitudinally within a specified frequency range, the vibration node N2 is positioned on the tip side from the vibration node N1.
- a specified frequency eg, 47 kHz
- the probe main body portion 31 is provided with a cross-sectional area increasing portion 37.
- the cross-sectional area increasing portion 37 is located on the distal end side from the horn portion (second horn portion) 36, and the probe main body portion 31 is arranged from the contact surface 33 to the distal end (vibration output end) of the cross-sectional area increasing portion 37 in the longitudinal axis direction.
- the cross-sectional area increasing portion 37 has a dimension L8 extending from the base end (vibration input end) E5 to the front end (vibration output end) E6 in the longitudinal axis direction. Since the extension dimension L8 is small, the distance from the base end E5 to the front end E6 is small in the cross-sectional area increasing portion 37.
- the probe body 31 has a substantially constant outer diameter from the distal end E4 of the horn portion (second horn portion) 36 to the proximal end E5 of the cross-sectional area increasing portion 37 in the longitudinal axis direction. Therefore, the probe main body 31 has an outer diameter D3 at the proximal end E5 of the cross-sectional area increasing portion 37. That is, at the distal end E4 of the horn portion 36 and the proximal end E5 of the cross-sectional area increasing portion 27, the outer diameter of the probe main body portion 31 is the outer diameter D3, which is substantially the same size.
- the probe main body portion 31 has an outer diameter D4 larger than the outer diameter D3 at the distal end E6 of the cross-sectional area increasing portion 37. That is, in the cross-sectional area increasing portion 37, the outer diameter of the probe main body 31 increases from the outer diameter D3 to the outer diameter D4 toward the distal end side.
- the outer diameter D4 is substantially the same as the outer diameter D2 at the proximal end E3 of the horn portion 36. In this case, the outer diameter D4 is preferably 3.8 mm.
- the vibration antinode A3 that is one of the vibration antinodes of the longitudinal vibration is located in the cross-sectional area increasing portion 37. Since the vibration antinode A3 in which the stress due to the ultrasonic vibration becomes zero is located in the cross-sectional area increasing portion 37, the amplitude of the longitudinal vibration (ultrasonic vibration) also in the cross-sectional area increasing portion 37 where the cross-sectional area increases toward the tip side. Hardly decreases.
- the vibration antinode A3 is located on the distal end side from the vibration node N2, and in this embodiment, the vibration antinode A3 is 2 in the vibration antinode of the vertical vibration. It is located on the tip side.
- the probe main body 31 includes a supported portion 38 supported by the sheath 7 via an elastic member (not shown).
- the supported portion 38 is located on the tip side from the cross-sectional area increasing portion 37.
- the probe main body 31 has a longitudinal dimension L9 from the distal end E6 of the cross-sectional area increasing portion 37 to the proximal end E7 of the supported portion 38 in the longitudinal axis direction.
- the longitudinal dimension L9 is preferably 24.1 mm.
- the supported portion 38 has an extending dimension L10 from the proximal end E7 to the distal end E8 in the longitudinal axis direction.
- the extension dimension L10 is small, and in one embodiment, the extension dimension L10 is 3 mm.
- the outer diameter of the probe main body 31 is kept substantially constant from the distal end E6 of the cross-sectional area increasing portion 37 to the proximal end E7 of the supported portion 38 in the longitudinal axis direction. Therefore, the probe main body 31 has an outer diameter D4 at the proximal end E7 of the supported portion 38. That is, at the distal end E6 of the cross-sectional area increasing portion 37 and the proximal end E7 of the supported portion 38, the outer diameter of the probe main body portion 31 is the outer diameter D4, which is substantially the same size. At the proximal end portion of the supported portion 38, the outer diameter of the probe main body portion 31 decreases from the outer diameter D4 to the outer diameter D5.
- the outer diameter D5 is smaller by about 0.4 mm than the outer diameter D4.
- the outer diameter of the probe main body 31 is kept substantially constant at the outer diameter D5 over most of the longitudinal axis direction.
- the outer diameter of the probe main-body part 31 increases from the outer diameter D5 to the outer diameter D6.
- the probe main body 31 has an outer diameter D6 at the tip E8 of the supported portion 38.
- the outer diameter D6 at the distal end E8 of the supported portion 38 is substantially the same as the outer diameter D4 at the proximal end E7 of the supported portion 38.
- the cross-sectional area of the probe main body 31 perpendicular to the longitudinal axis C is substantially the same at the base end E7 and the front end E8 of the supported portion 38.
- the outer diameter D6 is preferably 3.8 mm.
- the vibration node N3 that is one of the vibration nodes of the longitudinal vibration is located on the supported portion 38.
- the probe main body 31 (ultrasonic probe 8) is attached to the sheath 7 via the elastic member by the supported portion 38 even in the state of longitudinal vibration.
- the vibration unit 20 is supported by the sheath 7 at the vibration node N3 for longitudinal vibration, transmission of ultrasonic vibration from the supported portion 38 to the sheath 7 is prevented when the vibrating body unit 20 vibrates longitudinally within a specified frequency range.
- the vibration node (the most advanced vibration node) N3 is located on the tip side of the vibration node N2, and is located on the most distal side among the vibration nodes of the longitudinal vibration. is doing. Further, since the cross-sectional area of the probe main body 31 perpendicular to the longitudinal axis C is substantially the same at the proximal end E7 and the distal end E8 of the supported portion 38, the longitudinal vibration amplitude hardly changes in the supported portion 38.
- the distal end of the sheath 7 is located on the distal end side with respect to the distal end E8 of the supported portion 38. Therefore, in a state in which the vibrating body unit 20 vibrates longitudinally within a specified frequency range, the vibration node N3 located closest to the distal end among the vibration nodes is located inside the sheath 7.
- FIGS. 3 and 4 are diagrams showing the configuration of the distal end portion of the ultrasonic probe 8.
- FIG. one direction intersecting (substantially perpendicular) to the longitudinal axis C is defined as a first intersecting direction (the direction of the arrow P1 in each of FIGS. 2 and 3), and the first intersecting direction (the first intersecting direction)
- the direction opposite to the (vertical direction) is defined as a second intersecting direction (the direction of the arrow P2 in FIGS. 2 and 3).
- first width direction the direction of arrow B1 in FIG. 4
- second width direction the direction of arrow B2 in FIG. 4
- 2 and 3 are views of the ultrasonic probe 8 viewed from the first width direction side
- FIG. 4 is a view of the ultrasonic probe 8 viewed from the second cross direction side.
- a range indicated by a broken line S ⁇ b> 1 and a broken line S ⁇ b> 2 protrudes from the distal end of the sheath 7 toward the distal end side.
- the probe main body 31 extends from the supported portion 38 to a position on the tip side. That is, the tip E9 of the probe main body 31 is located on the tip side of the tip E8 of the supported portion 38.
- the distance in the longitudinal axis direction between the tip E8 of the supported portion 38 and the tip E9 of the probe main body 31 is small, and is about 1.2 mm in an embodiment.
- the amplitude of the longitudinal vibration is increased in the horn portion (first horn portion) 35 and the horn portion (second horn portion) 36, and the cross-sectional area increasing portion 37 and the supported portion are increased.
- the amplitude of the longitudinal vibration hardly changes. Due to the above-described configuration, in one embodiment, when a longitudinal vibration having an amplitude of 18 ⁇ m at the vibration antinode is transmitted to the base end (contact surface 33) of the probe main body 31, the probe main body 31 is At E6, the vibration at the vibration antinode becomes longitudinal vibration of 80 ⁇ m.
- the taper portion (cross-sectional area decreasing portion) 41 is continuous with the distal end side of the probe main body portion 31.
- the cross-sectional area perpendicular to the longitudinal axis C decreases toward the tip side.
- the proximal end of the tapered portion 41 is continuous with the distal end E9 of the probe main body portion 31. Therefore, the tip E9 of the probe main body 31 is a boundary position between the probe main body 31 and the tapered portion 41.
- the ultrasonic probe 8 has a longitudinal dimension L11 from the distal end to the proximal end (E9) of the tapered portion 41 in the longitudinal axis direction. In one embodiment, the longitudinal dimension L11 is preferably 32.5 mm.
- the taper portion 41 includes a first diaphragm outer surface 51 that faces the first intersecting direction.
- the first axis from the longitudinal axis C to the first diaphragm outer surface 51 between the base end (E9) and the first diaphragm end position (first distance reduction end position) E10 in the longitudinal axis direction.
- the distance (first distance) ⁇ in the crossing direction of 1 decreases from the proximal end side toward the distal end side.
- the first aperture end position E10 is located on the distal end side from the proximal end (E9) of the tapered portion 41.
- the taper portion 41 has a first diaphragm dimension (first distance reduction dimension) L12 between the base end (E9) and the first diaphragm end position E10 in the longitudinal axis direction.
- the first aperture dimension L12 is preferably 18 mm.
- the proximal end (E 9) of the tapered portion 41 is the proximal end of the first diaphragm outer surface 51
- the first diaphragm end position E 10 is the distal end of the first diaphragm outer surface 51.
- the taper portion 41 includes a second diaphragm outer surface 52 facing the second intersecting direction.
- the distance (second distance) ⁇ ′ in the crossing direction of 2 decreases from the proximal end side toward the distal end side.
- the second stop end position E11 is located on the front end side with respect to the first stop end position E10.
- the taper portion 41 has a second aperture size (second distance reduction size) larger than the first aperture size L12 between the base end (E9) and the second aperture end position E11 in the longitudinal axis direction. ) L13.
- the second aperture dimension L13 is preferably 21 mm.
- the proximal end (E9) of the taper portion 41 is the proximal end of the second diaphragm outer surface 52
- the second diaphragm end position E11 is the distal end of the second diaphragm outer surface 52.
- the tip of the first diaphragm outer surface 51 (first diaphragm end position E10) is compared with the tip of the second diaphragm outer surface 52 (second diaphragm end position E11). It is located on the base end side and is separated from the tip end of the second diaphragm outer surface 52 in the longitudinal axis direction.
- the first crossing direction and the second crossing direction are between the base end (E9) and the second stop end position E11 in the longitudinal axis direction.
- the thickness (dimension) T of the acoustic probe 8 decreases toward the tip side.
- the base end (E9) of the tapered portion 41 is the thickness reduction start position
- the second aperture end position E11 is the thickness reduction end position.
- the first aperture angle ⁇ 1 which is the aperture angle (acute angle) with respect to the longitudinal axis direction of the first aperture outer surface 51
- the second aperture angle ⁇ 2 which is the aperture angle (acute angle) with respect to the longitudinal direction of the outer surface 52, and is different from the second aperture angle ⁇ 2.
- the taper portion 41 includes a third diaphragm outer surface 53 facing the first width direction and a fourth diaphragm outer surface 54 facing the second width direction.
- the distance in the second width direction from the axis C to the fourth diaphragm outer surface 54 decreases as it goes from the proximal end side to the distal end side.
- the ultrasonic probe 8 has a longitudinal dimension L14 from the tip to the width reduction start position E12 in the longitudinal axis direction.
- the longitudinal dimension L14 is smaller than the longitudinal dimension L11 from the distal end of the ultrasonic probe 8 to the proximal end (E9) of the tapered portion 41 in the longitudinal axis direction. Therefore, the width reduction start position E12 is located on the distal end side from the proximal end (E9) of the tapered portion 41.
- the distance in the longitudinal axis direction between the base end (E9) of the tapered portion 41 and the width reduction start position E12 is small.
- the longitudinal dimension L14 is preferably 32 mm.
- the distance in the longitudinal axis direction between the proximal end (E9) of the tapered portion 41 and the width reduction start position E12 is about 0.5 mm.
- the width reduction start position E12 is the base end of the third diaphragm outer surface 53 and the fourth diaphragm outer surface 54
- the width reduction end position E13 is the third diaphragm outer surface 53 and the fourth diaphragm outer surface 54. This is the tip of the diaphragm outer surface 54.
- the ultrasonic probe 8 has a longitudinal dimension L15 from the tip to the width reduction end position E13 in the longitudinal axis direction.
- the width reduction end position E13 is located on the front end side with respect to the second aperture stop position E11.
- the width reduction end position E13 is the tip of the tapered portion 41.
- the longitudinal dimension L15 is preferably 9 mm. In this embodiment, the distance in the longitudinal axis direction between the second stop end position E11 and the width reduction end position E13 is about 2 mm.
- the ultrasonic probe 8 has a distance in the first intersecting direction from the longitudinal axis C to the first stop outer surface 51 ( (First distance) ⁇ 1.
- the distance ⁇ 1 is smaller than a half value of the outer diameter D6 at the tip E9 of the probe main body 31. In an embodiment, the distance ⁇ 1 is not less than 0.45 mm and not more than 0.5 mm.
- the thickness (dimension) T of the ultrasonic probe 8 in the first intersecting direction and the second intersecting direction Decreases to a thickness T1. Therefore, at the second stop end position (the tip of the second stop outer surface 52) E11, the ultrasonic probe 8 has a first cross direction (first vertical direction) and a second cross direction (second cross direction). It has a thickness T1 in the vertical direction).
- the thickness T1 is smaller than the outer diameter D6 at the tip E9 of the probe main body 31. In one embodiment, the thickness T1 is preferably 1.7 mm.
- the width (dimension) W of the ultrasonic probe 8 in the first width direction and the second width direction is reduced to the width dimension W1.
- the ultrasonic probe 8 sets the width dimension W1 in the first width direction and the second width direction.
- the width dimension W1 is smaller than the outer diameter D6 at the tip E9 of the probe main body 31.
- the width dimension W1 is preferably 2.8 mm.
- the tapered portion 41 is configured as described above, in the tapered portion 41, the cross-sectional area perpendicular to the longitudinal axis C decreases toward the distal end side.
- a vibration node (the most advanced vibration node) N3 that is one of the vibration nodes of the longitudinal vibration is positioned on the supported portion 38.
- any vibration antinodes of the longitudinal vibration are located away from the tapered portion 41 in the longitudinal axis direction.
- the amplitude of the longitudinal vibration is expanded in the taper portion 41 whose cross-sectional area decreases toward the tip side.
- the amplitude of the longitudinal vibration at the distal end of the ultrasonic probe 8 is 140 ⁇ m or more and 150 ⁇ m or less.
- the taper dimension in the longitudinal axis direction from the proximal end (E9) to the distal end (E13) of the tapered portion 41 is equal to 8 minutes when the vibrating body unit 20 vibrates longitudinally within a specified frequency range.
- the 1/8 wavelength ( ⁇ / 8) in the state in which the vibrating body unit 20 vibrates longitudinally within a specified frequency range is in the longitudinal axis direction from the proximal end (E9) to the distal end (E13) of the tapered portion 41. It is smaller than the taper dimension.
- the vibrating body unit 20 in a state where the vibrating body unit 20 is longitudinally vibrated at 46 kHz to 48 kHz (specified frequency range), four minutes from the vibration node (most advanced vibration node) N3 to the vibration antinode (most advanced vibration antinode) A2.
- One wavelength ( ⁇ / 4) is 34 mm or more and 35 mm or less.
- the taper dimension in the longitudinal axis direction from the base end (E9) to the tip end (E13) of the taper portion 41 is about 23.5 mm, and the vibrator unit 20 is 46 kHz or more and 48 kHz or less (specified). In the state of longitudinal vibration in the frequency range).
- squeeze dimension L12 between the base end (E9) and the 1st aperture stop position E10 is 18 mm about the longitudinal axis direction. Therefore, the first diaphragm dimension L12 (that is, the dimension in the longitudinal axis direction of the first diaphragm outer surface 51) is also the state in which the vibrating body unit 20 vibrates longitudinally in the range of 46 kHz to 48 kHz (specified frequency range). It becomes larger than 1/8 wavelength.
- the first stop end position E10 is located on the most proximal side among the positions (for example, E10, E11, E13) where the stop ends on the outer peripheral surface (outer stop outer surfaces 51 to 54) of the tapered portion 41. ing.
- a curved extending portion 40 is provided on the tip side from the tapered portion 41 (and the probe main body portion 31).
- the curved extending portion 40 is extended in a state of being curved toward the first intersecting direction with respect to the probe main body portion 31 and the taper portion 41 (that is, the longitudinal axis C).
- the curved extending portion 40 includes a first curved outer surface 55 facing the first intersecting direction (the side on which the curved extending portion 40 is curved) and the second intersecting direction (the curved extending portion 40 is curved).
- a second curved outer surface 56 facing away from the side.
- the curved extending portion 40 includes a third curved outer surface 57 facing the first width direction and a fourth curved outer surface 58 facing the second width direction.
- the ultrasonic vibration is transmitted from the probe main body 31 to the curved extending portion 40 through the tapered portion 41, so that the curved extending portion 40 has a predetermined frequency range together with the probe main body 31 and the tapered portion 41. It vibrates longitudinally.
- the portion on the tip side from the first bending start position E14 is in the longitudinal axis direction ( Curved toward the first intersecting direction with respect to the probe body 31). Further, in the projection from the first width direction, on the second curved outer surface 56 of the curved extending portion 40, the portion on the distal end side from the second curved start position E15 is the first in the longitudinal axis direction. Curve to the cross direction side.
- the first curved outer surface 55 starts to bend in the first intersecting direction with respect to the longitudinal axis C at the first bending start position E14
- the second curved outer surface 56 is The bending to the first cross direction side with respect to the longitudinal axis C is started at the bending start position E15.
- the first bending start position (the base end of the first curved outer surface 55) E14 is closer to the distal end than the second bending start position (the base end of the second curved outer surface 56) E15.
- the curved extending portion 40 extends toward the distal end side with the second bending start position E15 as a base end (curved base end).
- the ultrasonic probe 8 has a longitudinal dimension L16 from the tip to the first bending start position E14 of the bending extending portion 40 in the longitudinal axis direction.
- the longitudinal dimension L16 is smaller than the longitudinal dimension L15 from the tip of the ultrasonic probe 8 to the width reduction end position E13 in the longitudinal axis direction. For this reason, the first bending start position E14 is located on the distal end side with respect to the width reduction end position E13.
- the longitudinal dimension L16 is 8.5 mm.
- the second bending start position (curving base end) E15 is located on the base end side from the first bending start position E14, and is located on the base side from the width reduction end position E13. ing. Therefore, in the present embodiment, the proximal end (E15) of the curved extending portion 40 is located closer to the proximal end than the distal end (E13) of the tapered portion 41. For this reason, in this embodiment, a part of the taper part 41 is formed by a part of the curved extension part 40.
- the dimension in the longitudinal axis direction between the second bending start position (curving base end) E15 and the width reduction end position E13 is about 1 mm, and the width reduction end position E13 and the first width reduction end position E13 are the same.
- the dimension in the longitudinal axis direction between the curve start position E14 is about 0.5 mm.
- a first axis-parallel outer surface 61 facing the first intersecting direction is continuous between the first diaphragm outer surface 51 and the first curved outer surface 55.
- the first axis-parallel outer surface 61 extends in parallel (substantially parallel) to the longitudinal axis C between the first stop end position E10 and the first curve start position E14. Therefore, the first stop end position E ⁇ b> 10 is the base end of the first axis parallel outer surface 61, and the first curve start position E ⁇ b> 14 is the tip of the first axis parallel outer surface 61.
- the first axially parallel outer surface 61 has an extending dimension (first extending dimension) L19 in the longitudinal axis direction. On the first axially parallel outer surface 61, the distance ⁇ in the first intersecting direction from the longitudinal axis C from the first stop end position E10 to the first bending start position E14 is kept substantially constant at the distance ⁇ 1. Be drunk.
- the second axially parallel outer surface 62 facing the second intersecting direction is continuous between the second diaphragm outer surface 52 and the second curved outer surface 56 in the longitudinal axis direction.
- the second axially parallel outer surface 62 extends in parallel (substantially parallel) to the longitudinal axis C between the second aperture end position E11 and the second curve start position E15. Therefore, the second stop end position E11 is the base end of the second axis parallel outer surface 62, and the second curve start position E15 is the tip of the second axis parallel outer surface 62.
- the second axially parallel outer surface 62 has an extending dimension (second extending dimension) L20 in the longitudinal axis direction.
- the extension dimension L19 of the first axis parallel outer surface 61 is larger than the extension dimension L20 of the second axis parallel outer surface 62.
- the distance ⁇ ′ in the second intersecting direction from the longitudinal axis C is maintained substantially constant from the second stop end position E11 to the second bending start position E15. .
- the first crossing direction and the second crossing position between the second stop end position E11 and the second bending start position (the base end of the curved extending portion 40) E15 in the longitudinal axis direction is kept substantially constant at the thickness T1.
- the width W of the ultrasonic probe 8 in the first width direction and the second width direction is approximately the width dimension W1 between the width reduction end position E13 and the tip of the ultrasonic probe 8 in the longitudinal axis direction. Kept constant.
- a reference plane (first reference plane) Y1 passing through the longitudinal axis C and perpendicular (substantially perpendicular) to the first intersecting direction and the second intersecting direction is defined.
- the distance (first distance) ⁇ 1 in the first intersecting direction from the longitudinal axis C to the first axis parallel outer surface 61 (the outer peripheral surface of the ultrasonic probe 8) is the first Becomes smaller than a half value of the thickness T1 of the ultrasonic probe 8 in the crossing direction and the second crossing direction. For this reason, in the taper portion 41, the ultrasonic probe 8 is asymmetric with the reference plane Y1 as the center plane.
- the cross-sectional center of gravity in a cross section perpendicular to the longitudinal axis C is shifted from the longitudinal axis C to the second intersecting direction side.
- the displacement of the cross-sectional center of gravity with respect to the longitudinal axis C in the second intersecting direction becomes large.
- a reference plane (second reference plane) Y2 that passes through the longitudinal axis C and is perpendicular (substantially perpendicular) to the first width direction and the second width direction is defined.
- the ultrasonic probe 8 is substantially symmetric with the reference plane Y2 as the center plane.
- the curved extending portion 40 extends from the second bending start position E15 that is the proximal end of the curved extending portion 40 toward the distal end side, and is in the first intersecting direction with respect to the probe main body portion 31 and the tapered portion 41.
- the 1st curve extension part 42 which curves to the side is provided.
- a tangent line at the first bending start position E14 at a portion facing the first intersecting direction side of the outer peripheral surface of the first bending extending portion 42. Has an acute angle ⁇ 1 with respect to the longitudinal axis direction.
- a tangent line at the second bending start position (curved base end) E15 at a portion facing the second intersecting direction side of the outer peripheral surface of the first curved extending portion 42. Has an acute angle ⁇ 2 with respect to the longitudinal axis direction.
- the acute angle ⁇ 1 and the acute angle ⁇ 2 are larger than 0 ° and not larger than 10 °. In one embodiment, the acute angle ⁇ 1 is 5 ° and the acute angle ⁇ 2 is 5 °.
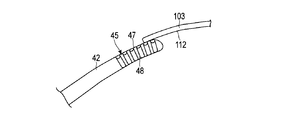
- the second curved extending portion 45 is continuous with the distal end side of the first curved extending portion 42.
- the second curved extending portion 45 is extended in a state of being curved toward the first intersecting direction with respect to the first curved extending portion 42.
- the portion facing the first intersecting direction side of the outer peripheral surface of the second curved extending portion 45 is extended in an arc shape with an angle R1. Yes.
- the portion of the outer peripheral surface of the second curved extending portion 45 that faces the second intersecting direction is extended in an arc shape having an angle R2.
- the arc R1 and the center O1 of the arc R2 are located on the first intersecting direction side from the curved extending portion 40 (ultrasonic probe 8).
- the acute angle with respect to the longitudinal axis direction is the tip at the portion facing the first intersecting direction side of the outer peripheral surface of the second curved extending portion 45. It gets bigger as you go to the side.
- the acute angle with respect to the longitudinal axis direction is the tip at the portion facing the second intersecting direction side of the outer peripheral surface of the second curved extending portion 45. It gets bigger as you go to the side. Therefore, in the second curved extending portion 45, the acute angle with respect to the longitudinal axis direction increases as going toward the distal end side.
- the tangent at the tip has an acute angle ⁇ 3 with respect to the longitudinal axis direction.
- tip has acute angle (theta) 4 with respect to a longitudinal axis direction. That is, at the tip of the first curved outer surface 55, the curved extending portion 40 has an acute angle ⁇ 3 with respect to the longitudinal axis direction. Then, at the tip of the second curved outer surface 56, the curved extending portion 40 has an acute angle ⁇ 4 with respect to the longitudinal axis direction.
- the angle R1 is 15 mm and the acute angle ⁇ 3 is 15 °.
- an acute angle ⁇ 4 is defined in correspondence with the angle R2.
- the acute angle ⁇ 4 is 20 °.
- the acute angle ⁇ 4 with respect to the longitudinal axis direction of the tangent at the tip is It is preferably 10 ° or more and 30 ° or less, and preferably 20 ° or more and 25 ° or less.
- a direction perpendicular to the extending direction (substantially perpendicular) and perpendicular to the width direction (substantially perpendicular) is defined as a thickness direction.
- the extending direction of the ultrasonic probe 8 is not parallel to the longitudinal axis. Therefore, in the curved extending portion 40, the thickness direction is relative to the first intersecting direction and the second intersecting direction. Not parallel.
- the ultrasonic probe 8 is kept substantially constant at the thickness dimension T2 in the thickness direction from the first bending start position E14 to the tip in the longitudinal axis direction.
- the thickness dimension T2 that is the distance between the first curved outer surface 55 and the second curved outer surface 56 is approximately between the first bending start position E14 and the tip of the ultrasonic probe 8. Kept constant. In one embodiment, the thickness dimension T2 is 1.5 mm. Accordingly, the acute angles ⁇ 1 to ⁇ 4 and the angles R1 and R2 are determined so that the thickness dimension T2 of the ultrasonic probe 8 is substantially constant from the first bending start position E14 to the tip.
- the portion of the outer peripheral surface of the second curved extending portion 45 facing the first intersecting direction has a separation distance T3 from the longitudinal axis C in the first intersecting direction at the tip.
- the separation distance T3 is preferably 1.9 mm.
- the second curved extending portion 45 includes a distal end surface 46 that forms the distal end of the ultrasonic probe 8.
- the first curved outer surface 55 (the portion facing the first intersecting direction side of the outer peripheral surface of the second curved extending portion 45) and the tip surface 46 is formed in a curved surface having an angle R3.
- the gap between the second curved outer surface 56 (the portion facing the second intersecting direction side of the outer peripheral surface of the second curved extending portion 45) and the tip surface 46 is between
- the third curved outer surface 57 (the outer peripheral surface of the second curved extending portion 45 is formed in a curved shape having an angle R4.
- the tip end face 46 are formed in a curved surface having an angle R5.
- FIG. 5 is a view of the second curved extending portion 45 (the distal end portion of the curved extending portion 40) viewed from the first width direction side.
- FIG. 6 is a cross-sectional view taken along the line VI-VI in FIG. 5 and shows a cross section perpendicular to the extending direction of the curved extending portion 40.
- the second curved extending portion 45 is provided with cutting surfaces (treatment surfaces) 47 to 49.
- the first cutting surface 47 is provided on the second curved outer surface 56 (a portion facing the second crossing direction side on the outer surface of the curved extending portion 40).
- the second cutting surface 48 is provided on the third curved outer surface 57 (the portion facing the first width direction side on the outer surface of the curved extending portion 40), and the third cutting surface 49 is the first cutting surface 49.
- 4 is provided on the curved outer surface 58 (portion facing the second width direction side on the outer surface of the curved extending portion 40). In each of the cutting surfaces 47 to 49, a plurality of grooves described later are formed.
- each of the cutting surfaces 47 to 49 extends from the distal end (the distal end surface 46) of the curved extending portion 40 toward the proximal end side.
- the first cutting surface 47 is the second curved extending portion 45 and is provided on the second curved outer surface 56. For this reason, in the projection from each of the first width direction and the second width direction, the center (O1) of the first cutting surface 47 is located on the first intersecting direction side from the curved extending portion 40. It is formed in an arc shape.
- the second curved extending portion 45 has a thickness dimension T6 in the thickness direction of the curved extending portion 40 between the first cutting surface 47 and the first curved outer surface 55.
- a thickness dimension T6 between the first cutting surface 47 and the first curved outer surface 55 is substantially the same as the thickness dimension T2.
- the second curved extending portion 45 is provided between the second cutting surface 48 (third curved outer surface 57) and the third cutting surface 49 (fourth curved outer surface 58).
- a width dimension W5 in the second width direction The width dimension W5 between the second cutting surface 48 and the third cutting surface 49 is substantially the same as the width dimension W1.
- the thickness dimension T6 (T2) in the thickness direction is the width dimension in the first width direction and the second width direction between the third curved outer surface 57 and the fourth curved outer surface 58. It is smaller than W5 (W1).
- the second cutting surface 48 is formed with a plurality of (six in this embodiment) extending grooves (first extending grooves) 63A to 63F.
- Each of the extending grooves 63A to 63F extends substantially perpendicularly to the extending direction of the curved extending portion 40.
- the extending grooves 63A to 63F extend along the thickness direction of the curved extending portion 40. Yes. Further, the extending grooves 63A to 63F are arranged in parallel in the extending direction of the curved extending portion 40.
- Each of the extending grooves 63A to 63F has an acute angle ⁇ 1 between the extending grooves adjacent to the extending direction of the curved extending portion 40 (one or two corresponding to 63A to 63F). That is, the extending direction of each of the extending grooves 63A to 63F is shifted by an acute angle ⁇ 1 with respect to the extending direction of the adjacent extending grooves (one or two corresponding to 63A to 63F). Further, the most proximal end extending groove 63F located on the most proximal side among the extending grooves 63A to 63F is defined.
- the extending direction of the most proximal end extending groove 63F has an obtuse angle ⁇ 8 with respect to the proximal end side.
- the acute angle ⁇ 1 is 3 ° and the obtuse angle ⁇ 8 is 95 °.
- each of the extending grooves 63A to 63F forms an angle ⁇ 3 with the first cutting surface 47, and the angle ⁇ 3 is 90 °. .
- the extending grooves 63A to 63F intersect at the center (O1) of the arc of the first cutting surface 47.
- Each of the extending grooves 63A to 63F has a width ⁇ 3 and a depth W3. In one embodiment, the width ⁇ 3 is 0.5 mm and the depth W3 is 0.35 mm.
- a plurality (six in this embodiment) of extending grooves (second extending grooves) 65A to 65F are formed on the third cutting surface 49.
- Each of the extended grooves (second extended grooves) 65A to 65F is substantially symmetric with the corresponding extended groove (one corresponding to 63A to 63F) with the reference plane Y2 as the central plane. For this reason, in the projection from the second width direction, the extending grooves 65A to 65F are located with respect to the arc-shaped first cutting surface 47 whose center is located on the first intersecting direction side from the curved extending portion 40. In a state orthogonal to each other, the third cutting surface 49 is extended.
- an acute angle ⁇ 1, an obtuse angle ⁇ 8, a width ⁇ 3, and a depth W3 are defined in relation to the extending grooves 65A to 65F.
- the second curved extending portion 45 extends from the bottom position of each of the extending grooves 63A to 63F to the bottom position of the corresponding extending groove (one corresponding to 65A to 65F) in the first width direction and
- the second width direction has a width direction dimension W4.
- the width direction dimension W4 is not less than 2.1 mm and not more than 2.15 mm.
- each of the relay grooves 71A to 71F extends substantially perpendicularly to the extending direction of the curved extending portion 40, and in the present embodiment, the width direction of the curved extending portion 40 (the first width direction and the second width direction). It extends along the width direction.
- One end of each of the relay grooves 71A to 71F is continuous with the corresponding extended groove (one corresponding one of 63A to 63F), and the other end of each of the relay grooves 71A to 71F is the corresponding extended groove (65A to 65F). A corresponding one of 65F).
- the relay grooves 71A to 71F have the same width ⁇ 3 as the extending grooves 63A to 63F and 65A to 65F, and a depth T5.
- the depth T5 is not less than 0.3 mm and not more than 0.35 mm.
- each bottom surface of the relay grooves 71A to 71F is formed in an arc shape having an angle ⁇ 3 / 2.
- the second curved extending portion 45 between the first curved outer surface 55 (portion facing the first crossing direction side of the outer surface) and the second cutting surface 48 in a cross section perpendicular to the extending direction. And between the 1st curved outer surface 55 and the 3rd cutting surface 49, it forms in the curved surface shape of the angle
- the curved surface portion of the corner R6 is formed over the range S1 of FIG. 3 in the longitudinal axis direction, and the curved surface portion of the corner R7 is formed over the range S2 of FIG. 3 in the longitudinal axis direction. That is, the curved surface portion of the corner R6 and the curved surface portion of the corner R7 are extended from the distal end of the ultrasonic probe 8 to the tapered portion 41 in the longitudinal axis direction, and the protruding portion (exposed portion) from the distal end of the sheath 7 in the ultrasonic probe 8 ), A curved surface portion of the corner R6 and a curved surface portion of the corner R7 are formed.
- a part of the tapered portion 41 and the curved extending portion 40 face the first crossing direction side of the outer surface and the first width direction side of the outer surface.
- a part of the tapered portion 41 and the curved extending portion 40 face the first crossing direction side of the outer surface and the first width direction side of the outer surface.
- Between the part and between the part facing the first cross direction side of the outer surface and the part facing the second width direction side of the outer surface is formed in a curved surface shape with an angle R6.
- the extending grooves (one corresponding to 63A to 63F) corresponding to each of the relay grooves 71A to 71F, And between the relay grooves 71A to 71F and the corresponding extension grooves (corresponding ones of 65A to 65F) are formed in a curved surface having an angle R8.
- the angle R8 is 0.55 mm.
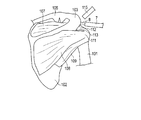
- FIGS. 7 and 8 are views showing a state in which bone is being cut at the shoulder joint 100 using the ultrasonic treatment system 1.
- 7 is a view of the shoulder joint 100 viewed from the front side (chest side)
- FIG. 8 is a view of the shoulder joint 100 viewed from the back side (back side).
- the shoulder joint 100 is a joint between the humerus 101 and the scapula 102.
- the scapula 102 includes an acromion 103.
- a clavicle 105 is connected to the shoulder cap 103.
- a conrotator rotator cuff 111 is formed below the acromion 103 as tendons of the subscapular muscle 106, the supraspinatus 107, the subspinous muscle 108, and the small circular muscle 109.
- a humerus 101 is extended from the rotator cuff 111.
- a cavity 113 is formed between the lower surface 112 of the acromion 103 and the rotator cuff 111.
- the ultrasonic treatment tool 2 is used when cutting a hard tissue such as a bone in a narrow space such as a joint cavity.
- a hard tissue such as a bone in a narrow space such as a joint cavity.
- the distal end of the rigid endoscope (arthroscope) 115 is inserted into the cavity 113 between the acetabulum 103 and the rotator cuff tendon 111.
- the tip of the ultrasonic probe 8 are inserted.
- Each of the rigid endoscope 115 and the ultrasonic probe 8 is inserted from the outside of the human body into the cavity 113 through any of an insertion position on the front side, an insertion position on the side, and an insertion position on the rear side.
- the insertion location of the rigid endoscope 115 is different from the insertion location of the ultrasonic probe 8. 7 and 8, the rigid endoscope 115 is inserted into the cavity 113 from the insertion site on the front side, and the ultrasonic probe 8 is inserted into the cavity 113 from the insertion site on the side. Then, any one of the cutting surfaces 47 to 49 of the ultrasonic probe 8 is brought into contact with the lower surface 112 of the shoulder peak 103 in the cavity 113 under observation by the rigid endoscope 115.
- FIG. 9 and 10 are views showing a state in which the first cutting surface 47 of the second curved extending portion 45 of the ultrasonic probe 8 is in contact with the lower surface 112 of the acromion 103.
- FIG. 10 the first cutting surface 47 is brought into contact with the lower surface 112 of the shoulder ridge 103 at a position different from that in FIG. 9.
- the first curved extending portion 42 is bent in the first vertical direction side with respect to the probe main body portion 31 extending along the longitudinal axis C, and the second curved extending portion is provided.
- the installation portion 45 is further curved toward the first vertical direction side with respect to the first curved extension portion 42.
- the first cutting surface 47 is centered on the first intersecting direction side from the curved extending portion 40 ( It is formed in an arc shape in which O1) is located.
- a cavity 113 between the acromion 103 and the rotator cuff 111 is narrow, and the lower surface 112 of the acromion 103 is formed in a curved surface shape.
- the contact angle of the first cutting surface 47 with respect to the lower surface 112 of the accumulator 103 is different. Different. In the present embodiment, since the first curved extending portion 42 and the second curved extending portion 45 are formed as described above, the contact angle of the first cutting surface 47 with respect to the lower surface 112 of the shoulder ridge 103 changes. Even in this case, the first cutting surface 47 can be appropriately brought into contact with the lower surface 112 of the shoulder ridge 103. For example, in both FIG. 9 and FIG. 10, the first cutting surface 47 appropriately contacts the lower surface 112 of the acromion 103.
- the first cutting surface 47 is appropriately The lower surface 112 of the shoulder ridge 103 can be brought into contact.
- the first cutting surface 47 is provided on the second curved outer surface 56 of the curved extending portion 40, and the second curved outer surface 56 (the first outer circumferential surface of the curved extending portion 40 is provided). 2), the acute angle ⁇ 4 with respect to the longitudinal axis direction of the tangent at the tip is 10 ° or more and 30 ° or less (preferably 20 ° or more and 25 ° or less). By setting the acute angle ⁇ 4 to 10 ° or more and 30 ° or less (especially, 20 ° or more and 25 ° or less), the first cutting surface 47 has a shape corresponding to the lower surface 112 of the shoulder ridge 103, and any lower surface 112 of the shoulder ridge 103 is formed. Even in the position, the first cutting surface 47 can be more easily and appropriately brought into contact with the lower surface 112 of the shoulder ridge 103.
- the relay grooves 71A to 71F extend substantially perpendicular to the extending direction of the curved extending portion 40 (that is, the vibration direction due to longitudinal vibration). Since the relay grooves 71A to 71F are extended substantially perpendicular to the vibration direction due to the longitudinal vibration, the second curved extending portion 45 is longitudinally vibrated by the ultrasonic vibration while the first cutting surface 47 is in contact therewith. By doing so, the bone (osteophyte) is appropriately cut. That is, hard bone can be appropriately cut.
- the first cutting surface 47 is easily brought into contact with the hard tissue even in a joint space such as the space 113 between the acromion 103 and the rotator cuff 111, that is, in a narrow space.
- the hard structure is appropriately cut by the one cutting surface 47. That is, even in a narrow space, the accessibility to the hard tissue and the machinability of the hard tissue are ensured.
- the bone may be cut by bringing the second cutting surface 48 or the third cutting surface 49 into contact with the lower surface 112 of the shoulder ridge 103. Further, when cutting the bone (osteophyte) by bringing the first cutting surface 47 into contact with the lower surface 112 of the acromion 103, the second cutting is performed in the vicinity of the portion to be cut by the first cutting surface 47. The bone is cut by the surface 48 and the third cutting surface 49. By cutting the bone with the cutting surfaces 48 and 49, it is possible to prevent only the portion cut by the first cutting surface 47 from being dented and to prevent a step from being formed on the lower surface 112 of the shoulder peak 103. .
- the extending grooves 63A to 63F of the second cutting surface 48 and the extending grooves 65A to 65F of the third cutting surface 49 are with respect to the extending direction of the ultrasonic probe 8 (that is, the vibration direction due to longitudinal vibration). And extending substantially vertically (along the thickness direction of the curved extending portion 40). Since the extending grooves (first extending grooves) 63A to 63F extend substantially perpendicular to the vibration direction due to the longitudinal vibration, when cutting with the second cutting surface 48 using ultrasonic vibration, Bone machinability is improved.
- the extending grooves (second extending grooves) 65A to 65F extend substantially perpendicular to the vibration direction due to the longitudinal vibration, cutting is performed on the third cutting surface 49 using ultrasonic vibration. In this case, the machinability of the bone is improved.
- extending grooves (first extending grooves) 63A to 63F are extended on the second cutting surface 48 in a state orthogonal to the arc-shaped first cutting surface 47, and the third cutting surface 48 On the cutting surface 49, extending grooves (second extending grooves) 65A to 65F are extended in a state orthogonal to the arcuate first cutting surface 47. For this reason, when cutting with the 2nd cutting surface 48 or the 3rd cutting surface 49, the machinability of a bone improves.
- each of the relay grooves 71A to 71F is continuous with the corresponding extending groove (one corresponding to 63A to 63F) and the corresponding extending groove (one corresponding to 65A to 65F). For this reason, when the bone is cut with the cutting surfaces 47 to 49, the bone is cut uniformly without unevenness, and the machinability is further improved.
- each of the relay grooves 71A to 71F and the corresponding extension groove (one corresponding to 63A to 63F) and each of the relay grooves 71A to 71F are provided with an extension groove ( And a corresponding one of 65A to 65F) is formed into a curved surface having an angle R8. Therefore, between each of the relay grooves 71A to 71F and the corresponding extended groove (one corresponding one of 63A to 63F), and to the corresponding extended groove (65A to 65F) of each of the relay grooves 71A to 71F. It is effectively prevented that the bone remains without being cut between the corresponding one).
- the front end of the first diaphragm outer surface 51 is based on the base of the second diaphragm outer surface 52 (second diaphragm end position E11).
- the extension dimension L19 of the first axis-parallel outer surface 61 is larger than the extension dimension L20 of the second axis-parallel outer surface 62.
- the curved extension portion 40 and the taper portion 41 are portions facing the first crossing direction side of the outer surface ( It is difficult for the back side portion) to come into contact with a living tissue or the like other than the treatment target (the lower surface of the shoulder ridge 103). Therefore, the first cutting surface 47 can be easily moved to a position where the first cutting surface 47 can come into contact with the lower surface 112 of the shoulder ridge 103.
- the first bending start position E14 of the first bending outer surface 55 is located on the distal end side with respect to the second bending start position E15 of the second bending outer surface 56. Therefore, when the first cutting surface 47 is moved to a position where it can come into contact with the lower surface 112 of the shoulder ridge 103, the curved extension portion 40 and the taper portion 41 are portions facing the first crossing direction side of the outer surface ( The back side part) is more difficult to come into contact with a living tissue or the like other than the treatment target (the lower surface of the shoulder ridge 103). Therefore, it becomes easier to move the first cutting surface 47 to a position where it can come into contact with the lower surface 112 of the shoulder ridge 103.
- FIG. 11 shows the longitudinal vibration amplitude V and the superhigh frequency between the second vibration antinode A3 from the distal end side and the vibration antinode A2 on the most distal end side in a state where the vibrating body unit 20 vibrates longitudinally within a specified frequency range.
- the stress ⁇ due to sonic vibration is shown.
- the horizontal axis indicates the position in the longitudinal axis direction
- the vertical axis indicates the amplitude V and the stress ⁇ .
- the change in the amplitude V of the longitudinal vibration is indicated by a solid line
- the change in the stress ⁇ is indicated by a one-dot chain line.
- the tapered portion 41 is located on the distal end side from the most distal vibration node N ⁇ b> 3, and the longitudinal vibration amplitude V at the tapered portion 41. Is enlarged.
- the longitudinal vibration having an amplitude at the vibration antinode of 80 ⁇ m is expanded by the taper portion 41 into a vertical vibration having an amplitude at the vibration antinode of 140 ⁇ m to 150 ⁇ m.
- the stress ⁇ due to the ultrasonic vibration increases at a portion where the cross-sectional area perpendicular to the vibration node and the transmission direction of the ultrasonic vibration decreases, and becomes zero at the vibration antinode. Therefore, as shown in FIG. 11, the stress ⁇ increases between the vibration node N3 and the tip (E13) of the tapered portion 41.
- the dimension in the longitudinal axis direction from the proximal end (E9) to the distal end (E13) of the taper portion 41 is 8 minutes when the vibrating body unit 20 vibrates longitudinally within a specified frequency range. Of one wavelength ( ⁇ / 8).
- the first diaphragm dimension L12 between the base end (E9) and the first diaphragm end position E10 in the longitudinal axis direction is also in a state in which the vibrating body unit 20 vibrates longitudinally within a specified frequency range. Becomes larger than one-eighth wavelength.
- the entire length between the vibration node N3 and the distal end (E13) of the taper portion 41 is increased.
- the stress ⁇ due to the sonic vibration is kept substantially uniform. That is, it is effectively prevented that the stress locally increases (that is, a peak is generated) between the vibration node N3 and the tip (E13) of the tapered portion 41.
- the vibrating body unit 20 is in a specified frequency range (for example, 46 kHz).
- the stress ⁇ is kept substantially uniform at about 300 Mpa between the vibration node N3 and the tip (E13) of the tapered portion 41. That is, in the present embodiment, the stress locally increases to about 700 Mpa (for example, at the tip (E13) of the taper portion 41) between the vibration node N3 and the tip (E13) of the taper portion 41. Is prevented. Since the stress ⁇ is prevented from locally increasing, it is possible to effectively prevent damage to the ultrasonic probe 8 due to ultrasonic vibration.
- the cross-sectional center of gravity in the cross section perpendicular to the longitudinal axis C is shifted from the longitudinal axis C to the second vertical direction.
- the displacement of the cross-sectional center of gravity with respect to the longitudinal axis C in the second intersecting direction becomes large.
- the shift of the center of gravity toward the first intersecting direction due to the bending of the curved extending portion 40 with respect to the longitudinal axis direction results in the center of gravity toward the second intersecting direction due to the tapered portion 41. It is canceled by the deviation.
- the first curved outer surface 55 and the front end surface 46 are formed in a curved surface having an angle R3. Further, in the projection from the first width direction, a space between the second curved outer surface 56 and the tip surface 46 is formed in a curved shape having an angle R4. In the projection from the second intersecting direction (one side of the intersecting direction), between the third curved outer surface 57 and the distal end surface 46 and between the fourth curved outer surface 58 and the distal end surface 46. Is formed in a curved surface having an angle R5.
- the ratio of the surface (outer surface) perpendicular to the extending direction of the ultrasonic probe 8 (that is, the vibration direction of longitudinal vibration) is reduced.
- the ratio of the surface perpendicular to the vibration direction of the longitudinal vibration even if the ultrasonic probe 8 is vibrated longitudinally while the second curved extension 45 is immersed in a liquid (physiological saline), The occurrence of cavitation in the vicinity of the front end face 46 is reduced. By reducing the occurrence of cavitation, the visibility of the operator in the procedure is improved.
- the portion facing the first crossing direction side of the outer surface and the first width of the outer surface are formed in a curved surface shape with an angle R6.
- the ultrasonic probe (8) extends along the longitudinal axis (C), and transmits the ultrasonic vibration from the proximal end side to the distal end side, and the probe main body.
- the first crossing direction with respect to the probe main body when the first crossing direction (P1) is one direction that is provided on the distal end side with respect to the portion (31) and crosses the longitudinal axis (C).
- a curved extension portion (40) that extends in a state of bending to the side.
- the curved extending portion (40) has a first curved outer surface (55) facing the first intersecting direction (P1) side and a direction opposite to the first intersecting direction (P1) in the second intersecting direction ( P2), the second curved outer surface (56) facing the second intersecting direction (P2) side, the longitudinal axis (C) and the first intersecting direction (P1) and the second intersecting direction (P2)
- a third curve facing the first width direction (B1) side when two directions perpendicular to the crossing direction (P2) of the two are defined as the first width direction (B1) and the second width direction (B2).
- the first cutting surface (47) formed on the second curved outer surface (56) extends in a curved manner in the projection from each of the first width direction (B1) and the second width direction (B2). It is formed in an arc shape with the center (O1) located closer to the first intersecting direction (P1) side than the portion (40).
- the first extending grooves (63A to 63F) extend along the thickness direction of the curved extending portion (40).
- the second extending grooves (65A to 65F) are formed along the thickness direction of the curved extending portion (40).
- One end of the relay groove (71A to 71F) extended to the first cutting surface (48) is continuous with the first extension groove (63A to 63F), and the other end is the second extension groove (65A). To 65F).
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Otolaryngology (AREA)
- Surgical Instruments (AREA)
- Mechanical Engineering (AREA)
Abstract
肩関節用の超音波プローブは、長手軸に交差する第1の交差方向側へプローブ本体部に対して湾曲する湾曲延設部を備える。前記湾曲延設部は、前記第1の交差方向側を向く第1の湾曲外表面と、前記第1の交差方向とは反対の第2の交差方向側を向く第2の湾曲外表面と、前記第1の交差方向及び前記第2の交差方向に垂直な第1の幅方向第1の幅方向側を向く第3の湾曲外表面と、前記第1の幅方向とは反対の第2の幅方向側を向く第4の湾曲外表面と、を備える。前記第2の湾曲外表面に形成される切削面の中継溝は、前記第3の湾曲外表面に形成される切削面の延設溝、及び、前記第4の湾曲外表面に形成される切削面の延設溝と連続する。
Description
本発明は、超音波振動によって例えば硬骨組織及び軟骨組織の切削を行う超音波プローブに関する。
特許文献1には、超音波プローブ(超音波ホーン)を備える超音波処置装置が開示されている。この超音波処置装置では、振動発生部(超音波振動機構)で発生した超音波振動が、超音波プローブにおいて基端側から先端側へ伝達される。超音波プローブの先端部には、メス部が処置面として形成されている。メス部では、超音波プローブの外表面が凸凹状に形成される。メス部を処置対象に接触させた状態で、メス部に超音波振動が伝達されることにより、処置対象(例えば、骨、その他の硬性組織)が切削される。
処置として、内視鏡(硬性鏡)による観察下で関節腔等の狭い空間において、骨等の硬性組織を切削することがある。この場合、関節腔等の狭い空間においても、骨に超音波プローブの処置面(切削面)を適切に接触させることが求められている。また、狭い空間においても、骨等の硬性組織を適切な強度で切削することが求められている。前記特許文献1の超音波プローブの形状では、狭い空間での硬性組織へのアクセス性、及び、狭い空間での硬性組織の切削性が、低下してしまう。
本発明は前記課題を解決するためになされたものであり、その目的とするところは、狭い空間においても硬性組織に切削面を接触させ易く、硬性組織が適切に切削される超音波プローブを提供することにある。
前記目的を達成するために、本発明のある態様の肩関節を超音波振動で処置するために、前記超音波振動を伝達する肩関節用の超音波プローブは、長手軸に沿って延設され、基端側から先端側へ前記超音波振動を伝達するプローブ本体部と、前記プローブ本体部に対して前記先端側に設けられ、前記長手軸に交差するある1つの方向を第1の交差方向とした場合に、前記プローブ本体部に対して第1の交差方向側へ湾曲する状態で延設される湾曲延設部と、前記湾曲延設部において前記第1の交差方向側を向く第1の湾曲外表面と、前記第1の交差方向とは反対方向を第2の交差方向とした場合に、前記湾曲延設部において第2の交差方向側を向く第2の湾曲外表面と、前記長手軸に交差し、かつ、前記第1の交差方向及び前記第2の交差方向に垂直な2方向を第1の幅方向及び第2の幅方向とした場合に、前記湾曲延設部において第1の幅方向側を向く第3の湾曲外表面と、前記湾曲延設部において第2の幅方向側を向く第4の湾曲外表面と、前記第2の湾曲外表面において複数の溝から形成されるとともに、処置対象を切削し、前記第1の幅方向及び前記第2の幅方向のそれぞれからの投影において、前記湾曲延設部より前記第1の交差方向側に中心が位置する円弧状に形成される第1の切削面と、前記第3の湾曲外表面に形成されるとともに、前記処置対象を切削し、前記湾曲延設部の厚さ方向に沿って延設される第1の延設溝を備える第2の切削面と、前記第4の湾曲外表面に形成されるとともに、前記処置対象を切削し、前記湾曲延設部の厚さ方向に沿って延設される第2の延設溝を備える第3の切削面と、前記第1の切削面に延設されるとともに、一端が第1の延設溝と連続し、他端が第2の延設溝と連続する中継溝と、を備える。
本発明によれば、狭い空間においても硬性組織に切削面を接触させ易く、硬性組織が適切に切削される超音波プローブを提供することができる。
(第1の実施形態)
本発明の第1の実施形態について、図1乃至図11を参照して説明する。図1は、本実施形態の超音波処置システム1を示す図である。図1に示すように、超音波処置システム1は、超音波処置具(ハンドピース)2と、エネルギー制御装置3と、振動子ユニット5と、を備える。超音波処置具2は、長手軸Cを有する。ここで、長手軸Cに平行な方向を長手軸方向とする。長手軸方向の一方側が先端側(図1の矢印C1側)であり、先端側とは反対側が基端側(図1の矢印C2の側)である。
本発明の第1の実施形態について、図1乃至図11を参照して説明する。図1は、本実施形態の超音波処置システム1を示す図である。図1に示すように、超音波処置システム1は、超音波処置具(ハンドピース)2と、エネルギー制御装置3と、振動子ユニット5と、を備える。超音波処置具2は、長手軸Cを有する。ここで、長手軸Cに平行な方向を長手軸方向とする。長手軸方向の一方側が先端側(図1の矢印C1側)であり、先端側とは反対側が基端側(図1の矢印C2の側)である。
超音波処置具2は、保持ユニット6と、シース7と、超音波プローブ8と、を備える。保持ユニット6は、術者が保持する保持ケーシング11と、保持ケーシング11に取付けられ、術者が操作するためのエネルギー操作入力部であるエネルギー操作ボタン12と、を備える。保持ユニット6の先端側には、長手軸Cに沿って延設される中空な筒状部材であるシース7が連結されている。このシース7の内部には、超音波プローブ(振動伝達部材)8が挿通されている。なお、超音波プローブ8の先端部は、シース7の先端から先端側に向かって突出している。
また、保持ユニット6の基端側には、振動子ケース13を有する振動子ユニット5が連結されている。振動子ユニット5には、ケーブル15の一端が接続されている。ケーブル15の他端は、エネルギー制御装置3に接続されている。エネルギー制御装置3は、電源と、電源からの電力を振動発生電力に変換する変換回路と、CPU(Central Processing Unit)又はASIC(application specific integrated circuit)を備えるプロセッサ(制御部)と、メモリ等の記憶媒体と、を備える。保持ケーシング11の内部には、エネルギー操作ボタン12でのエネルギー操作の入力によって開閉状態が変化するスイッチ(図示しない)が設けられる。スイッチは、振動子ユニット5及びケーブル15の内部を通って延設される信号経路を介して、エネルギー制御装置3のプロセッサに電気的に接続されている。また、超音波処置システム1では、保持ケーシング11の内部及び振動子ケース13の内部を通って、振動体ユニット20が延設されている。
図2は、振動体ユニット20の構成を示す図である。図2に示すように、振動体ユニット20は、前述の超音波プローブ8と、振動発生部である複数の圧電素子で構成された超音波振動子21と、中継伝達部材22と、を備える。超音波振動子21及び中継伝達部材22は、振動子ケース13の内部に配置され、中継伝達部材22は、振動子ケース13によって支持されている。超音波振動子21は、中継伝達部材22に取付けられている。保持ケーシング11の内部で中継伝達部材22の先端側に超音波プローブ8が接続される。中継伝達部材22には、長手軸Cに垂直な断面積が先端側に向かって減少する断面積変化部23が設けられている。断面積変化部(ホーン部)23は、超音波振動子21より先端側に位置している。超音波振動子21には、電気配線25A,25Bの一端が接続されている。電気配線25A,25Bは、ケーブル15の内部を通って延設され他端がエネルギー制御装置3に接続されている。
エネルギー操作ボタン12でのエネルギー操作の入力によってスイッチが閉状態になることにより、エネルギー制御装置3では、制御部が変換回路を制御し、電気配線25A,25Bを通して振動発生電力(振動発生電流)を超音波振動子21に供給する。これにより、超音波振動子21で超音波振動が発生し、発生した超音波振動が中継伝達部材22を介して超音波プローブ8に伝達される。この際、中継伝達部材22の断面積変化部23で、超音波振動の振幅が拡大される。
超音波プローブ8は、長手軸Cに沿って延設されるプローブ本体部31を備える。プローブ本体部31は、長手軸Cを軸中心として、略真直ぐに延設されている。プローブ本体部31の基端側には、係合接続部32が設けられている。係合接続部32が中継伝達部材22に設けられる係合溝(図示しない)と係合することにより(例えば、雌ネジと雄ネジとの螺合により)、中継伝達部材22の先端側にプローブ本体部31が接続される。中継伝達部材22にプローブ本体部31が接続されることにより、プローブ本体部31の基端に形成される当接面33が中継伝達部材22と当接する。プローブ本体部31へは、当接面33を通して、中継伝達部材22から超音波振動が伝達される。
プローブ本体部31に超音波振動が伝達されることにより、プローブ本体部31(超音波プローブ8)において、基端側から先端側へ超音波振動が伝達される。プローブ本体部31が超音波振動を伝達する状態では、振動体ユニット20は、規定の周波数を含む規定の周波数範囲で、振動方向が長手軸方向に平行な縦振動を行う。この際、振動体ユニット20の基端(中継伝達部材22の基端)に、縦振動の振動腹の1つである振動腹(最基端振動腹)A1が位置し、振動体ユニット20の先端(超音波プローブ8の先端)に、縦振動の振動腹の1つである振動腹(最先端振動腹)A2が位置する。ここで、振動腹A1は、縦振動の振動腹の中で最も基端側に位置し、振動腹A2は、縦振動の振動腹の中で最も先端側に位置する。ある実施例では、振動体ユニット20は、超音波振動を伝達することにより、47kHz(規定の周波数)で縦振動を行う状態に設計され、実際に、46kHz以上48kHz以下の周波数範囲(規定の周波数範囲)で縦振動する。
超音波プローブ8は、長手軸方向について先端から基端(係合接続部32の基端)まで全長L1を有する。ある実施例では、全長L1は、183.4mmである。また、超音波プローブ8は、長手軸方向について先端から当接面33(プローブ本体部31の基端)まで長手寸法L2を有する。ある実施例では、長手寸法L2は、177.5mmであることが好ましい。
プローブ本体部31には、ホーン部(第1のホーン部)35が設けられている。ホーン部35では、長手軸Cに垂直な断面積が先端側に向かって減少する。ホーン部(断面積減少部)35は、当接面33より先端側に位置し、プローブ本体部31は、長手軸方向について当接面33からホーン部35の基端(振動入力端)E1まで長手寸法L3を有する。ある実施例では、長手寸法L3は、29mmであることが好ましい。また、ホーン部(第1のホーン部)35は、長手軸方向について基端(振動入力端)E1から先端(振動出力端)E2までホーン長手寸法(第1のホーン長手寸法)L4を有する。ある実施例では、ホーン長手寸法L4は、20mmであることが好ましい。
プローブ本体部31は、長手軸方向について当接面33からホーン部35の基端E1まで、外径が略一定に保たれる。したがって、プローブ本体部31では、当接面33及びホーン部35の基端E1において外径D1を有する。ある実施例では、外径D1は、7mmであることが好ましい。また、ホーン部35では、先端側に向かって断面積が減少するため、ホーン部35の先端E2では、プローブ本体部31は、外径D1より小さい外径D2を有する。すなわち、ホーン部35では、外径D1から外径D2までプローブ本体部31の外径が先端側に向かって減少する。ある実施例では、外径D2は、3.8mmであることが好ましい。
振動体ユニット20が規定の周波数範囲(例えば46kHz以上48kHz以下)で縦振動する状態では、縦振動の振動節の1つである振動節N1がホーン部35の基端E1又は基端E1の近傍に位置し、長手軸方向について縦振動のいずれの振動腹もホーン部35から離れて位置している。このため、先端側に向かって断面積が減少するホーン部35では、縦振動(超音波振動)の振幅が拡大される。ある実施例では、ホーン部35の基端E1に振動腹での振幅が18μmの縦振動が伝達され、ホーン部35で縦振動の振幅が拡大される。なお、規定の周波数範囲に含まれる規定の周波数(例えば47kHz)で振動体ユニット20が縦振動する状態では、振動節N1がホーン部35の基端E1に位置する。
プローブ本体部31には、ホーン部(第2のホーン部)36が設けられている。ホーン部36では、長手軸Cに垂直な断面積が先端側に向かって減少する。ホーン部(断面積減少部)36は、ホーン部(第1のホーン部)35より先端側に位置し、プローブ本体部31は、長手軸方向について当接面33からホーン部36の基端(振動入力端)E3まで長手寸法L5を有する。ある実施例では、長手寸法L5は、88.1mmであることが好ましい。また、ホーン部(第2のホーン部)36は、長手軸方向について基端(振動入力端)E3から先端(振動出力端)E4までホーン長手寸法(第2のホーン長手寸法)L6を有する。ある実施例では、ホーン長手寸法L6は、14mmであることが好ましい。
プローブ本体部31は、長手軸方向についてホーン部(第1のホーン部)35の先端E2からホーン部(第2のホーン部)36の基端E3まで、外径が略一定に保たれる。したがって、プローブ本体部31では、ホーン部36の基端E3において外径D2を有する。すなわち、ホーン部35の先端E2及びホーン部36の基端E3では、プローブ本体部31の外径が、外径D2となり、略同一の大きさとなる。また、ホーン部36では、先端側に向かって断面積が減少するため、ホーン部36の先端E4では、プローブ本体部31は、外径D2より小さい外径D3を有する。すなわち、ホーン部36では、外径D2から外径D3までプローブ本体部31の外径が先端側に向かって減少する。ある実施例では、外径D3は、2.7mmであることが好ましい。
振動体ユニット20が規定の周波数範囲(例えば46kHz以上48kHz以下)で縦振動する状態では、縦振動の振動節の1つである振動節N2がホーン部36の基端E3又は基端E3の近傍に位置し、長手軸方向について縦振動のいずれの振動腹もホーン部36から離れて位置している。このため、先端側に向かって断面積が減少するホーン部36では、縦振動(超音波振動)の振幅が拡大される。なお、規定の周波数範囲に含まれる規定の周波数(例えば47kHz)で振動体ユニット20が縦振動する状態では、振動節N2がホーン部36の基端E3に位置する。また、振動体ユニット20が規定の周波数範囲で縦振動する状態では、振動節N2は、振動節N1より先端側に位置する。
プローブ本体部31には、断面積増加部37が設けられている。断面積増加部37では、長手軸Cに垂直な断面積が先端側に向かって増加する。断面積増加部37は、ホーン部(第2のホーン部)36より先端側に位置し、プローブ本体部31は、長手軸方向について当接面33から断面積増加部37の先端(振動出力端)E6まで長手寸法L7を有する。ある実施例では、長手寸法L7は、116.7mmであることが好ましい。また、断面積増加部37は、長手軸方向について基端(振動入力端)E5から先端(振動出力端)E6まで延設寸法L8を有する。延設寸法L8は、小さいため、断面積増加部37では、基端E5から先端E6までの距離が小さくなる。
プローブ本体部31は、長手軸方向についてホーン部(第2のホーン部)36の先端E4から断面積増加部37の基端E5まで、外径が略一定に保たれる。したがって、プローブ本体部31では、断面積増加部37の基端E5において外径D3を有する。すなわち、ホーン部36の先端E4及び断面積増加部27の基端E5では、プローブ本体部31の外径が、外径D3となり、略同一の大きさとなる。また、断面積増加部37では、先端側に向かって断面積が増加するため、断面積増加部37の先端E6では、プローブ本体部31は、外径D3より大きい外径D4を有する。すなわち、断面積増加部37では、外径D3から外径D4までプローブ本体部31の外径が先端側に向かって増加する。ある実施例では、外径D4は、ホーン部36の基端E3での外径D2と略同一である。この場合、外径D4は、3.8mmであることが好ましい。
振動体ユニット20が規定の周波数範囲で縦振動する状態では、縦振動の振動腹の1つである振動腹A3が断面積増加部37に位置している。超音波振動による応力がゼロになる振動腹A3が断面積増加部37に位置するため、先端側に向かって断面積が増加する断面積増加部37においても、縦振動(超音波振動)の振幅はほとんど減少しない。なお、振動体ユニット20が規定の周波数範囲で縦振動する状態では、振動腹A3は、振動節N2より先端側に位置し、本実施形態では、振動腹A3は、縦振動の振動腹の中で2番目に先端側に位置する。
プローブ本体部31は、弾性部材(図示しない)を介してシース7に支持される被支持部38を備える。被支持部38は、断面積増加部37より先端側に位置している。プローブ本体部31は、長手軸方向について断面積増加部37の先端E6から被支持部38の基端E7まで長手寸法L9を有する。ある実施例では、長手寸法L9は、24.1mmであることが好ましい。また、被支持部38は、長手軸方向について基端E7から先端E8まで延設寸法L10を有する。延設寸法L10は、小さく、ある実施例では、延設寸法L10は、3mmである。
プローブ本体部31は、長手軸方向について断面積増加部37の先端E6から被支持部38の基端E7まで、外径が略一定に保たれる。したがって、プローブ本体部31では、被支持部38の基端E7において外径D4を有する。すなわち、断面積増加部37の先端E6及び被支持部38の基端E7では、プローブ本体部31の外径が、外径D4となり、略同一の大きさとなる。被支持部38の基端部では、プローブ本体部31の外径が、外径D4から外径D5に減少する。ある実施例では、外径D5は、外径D4に比べ0.4mm程度だけ小さくなる。被支持部38では、長手軸方向について大部分に渡って、プローブ本体部31の外径が、外径D5で略一定に保たれる。そして、被支持部38の先端部においてにおいて、プローブ本体部31の外径が、外径D5から外径D6に増加する。これにより、プローブ本体部31は、被支持部38の先端E8において外径D6を有する。被支持部38の先端E8での外径D6は、被支持部38の基端E7での外径D4と略同一である。このため、被支持部38の基端E7及び先端E8では、長手軸Cに垂直なプローブ本体部31の断面積が略同一となる。ある実施例では、外径D6は、3.8mmであることが好ましい。
振動体ユニット20が規定の周波数範囲で縦振動する状態では、縦振動の振動節の1つである振動節N3が被支持部38に位置している。このため、プローブ本体部31(超音波プローブ8)は、縦振動している状態においても、被支持部38で弾性部材を介してシース7に取付けられる。また、縦振動の振動節N3でシース7に支持されるため、振動体ユニット20が規定の周波数範囲で縦振動する状態では、被支持部38からシース7への超音波振動の伝達が防止される。振動体ユニット20が規定の周波数範囲で縦振動する状態では、振動節(最先端振動節)N3は、振動節N2より先端側に位置し、縦振動の振動節の中で最も先端側に位置している。また、被支持部38の基端E7及び先端E8では、長手軸Cに垂直なプローブ本体部31の断面積が略同一となるため、被支持部38では、縦振動の振幅はほとんど変化しない。
また、シース7の先端は、被支持部38の先端E8より先端側に位置する。したがって、振動体ユニット20が規定の周波数範囲で縦振動する状態では、振動節の中で最も先端側に位置する振動節N3は、シース7の内部に位置する。
図3及び図4は、超音波プローブ8の先端部の構成を示す図である。ここで、長手軸Cに交差する(略垂直な)ある1つの方向を第1の交差方向(図2及び図3のそれぞれにおいれ矢印P1の方向)とし、第1の交差方向(第1の垂直方向)とは反対方向を第2の交差方向(図2及び図3のそれぞれにおいて矢印P2の方向)とする。また、長手軸Cに交差し(略垂直で)、かつ、第1の交差方向(第1の垂直方向)及び第2の交差方向(第2の垂直方向)に垂直な(交差する)2方向の一方を、第1の幅方向(図4において矢印B1の方向)とする。そして、第1の幅方向とは反対方向を第2の幅方向(図4において矢印B2の方向)とする。ここで、図2及び図3は、超音波プローブ8を第1の幅方向側から視た図であり、図4は、超音波プローブ8を第2の交差方向側から視た図である。なお、図3において、破線S1及び破線S2で示す範囲が、シース7の先端より先端側に突出する。
図3及び図4に示すように、プローブ本体部31は、被支持部38より先端側の位置まで延設されている。すなわち、プローブ本体部31の先端E9は、被支持部38の先端E8より先端側に位置している。ただし、被支持部38の先端E8とプローブ本体部31の先端E9との間の長手軸方向についての距離は、小さく、ある実施例では1.2mm程度である。
前述のように、プローブ本体部31では、ホーン部(第1のホーン部)35及びホーン部(第2のホーン部)36において縦振動の振幅が拡大され、断面積増加部37及び被支持部38において縦振動の振幅がほとんど変化しない。前述のような構成であるため、ある実施例では、プローブ本体部31の基端(当接面33)に振動腹での振幅が18μmの縦振動が伝達された場合に、プローブ本体部31のE6において、振動腹での振幅が80μmの縦振動になる。
プローブ本体部31の先端側には、テーパ部(断面積減少部)41が連続している。テーパ部(第3のホーン部)41では、長手軸Cに垂直な断面積が先端側に向かって減少する。テーパ部41の基端は、プローブ本体部31の先端E9と連続している。したがって、プローブ本体部31の先端E9は、プローブ本体部31とテーパ部41との間の境界位置となる。超音波プローブ8は、長手軸方向について先端からテーパ部41の基端(E9)まで長手寸法L11を有する。ある実施例では、長手寸法L11は、32.5mmであることが好ましい。
テーパ部41は、第1の交差方向側を向く第1の絞り外表面51を備える。テーパ部41では、長手軸方向について基端(E9)と第1の絞り終了位置(第1の距離減少終了位置)E10との間で、長手軸Cから第1の絞り外表面51までの第1の交差方向への距離(第1の距離)δが、基端側から先端側に向かうにつれて減少する。第1の絞り終了位置E10は、テーパ部41の基端(E9)より先端側に位置している。このため、テーパ部41は、長手軸方向について基端(E9)と第1の絞り終了位置E10との間に、第1の絞り寸法(第1の距離減少寸法)L12を有する。ある実施例では、第1の絞り寸法L12は、18mmであることが好ましい。本実施形態では、テーパ部41の基端(E9)が、第1の絞り外表面51の基端となり、第1の絞り終了位置E10が、第1の絞り外表面51の先端となる。
また、テーパ部41は、第2の交差方向側を向く第2の絞り外表面52を備える。テーパ部41では、長手軸方向について基端(E9)と第2の絞り終了位置(第2の距離減少終了位置)E11との間で、長手軸Cから第2の絞り外表面52までの第2の交差方向への距離(第2の距離)δ´が、基端側から先端側に向かうにつれて減少する。第2の絞り終了位置E11は、第1の絞り終了位置E10より先端側に位置している。このため、テーパ部41は、長手軸方向について基端(E9)と第2の絞り終了位置E11との間に、第1の絞り寸法L12より大きい第2の絞り寸法(第2の距離減少寸法)L13を有する。ある実施例では、第2の絞り寸法L13は、21mmであることが好ましい。本実施形態では、テーパ部41の基端(E9)が、第2の絞り外表面52の基端となり、第2の絞り終了位置E11が、第2の絞り外表面52の先端となる。このため、テーパ部41では、第1の絞り外表面51の先端(第1の絞り終了位置E10)が、第2の絞り外表面52の先端(第2の絞り終了位置E11)に比べて、基端側に位置し、長手軸方向について第2の絞り外表面52の先端から離間する。
前述のような構成であるため、テーパ部41では、長手軸方向について基端(E9)と第2の絞り終了位置E11との間において、第1の交差方向及び第2の交差方向についての超音波プローブ8の厚さ(寸法)Tが、先端側に向かって減少する。したがって、テーパ部41の基端(E9)は、厚さ減少開始位置となり、第2の絞り終了位置E11は、厚さ減少終了位置となる。また、第1の幅方向(幅方向の一方側)からの投影において、第1の絞り外表面51の長手軸方向に対する絞り角(鋭角)である第1の絞り角α1は、第2の絞り外表面52の長手軸方向に対する絞り角(鋭角)である第2の絞り角α2より大きく、第2の絞り角α2とは異なる。
また、テーパ部41は、第1の幅方向を向く第3の絞り外表面53、及び、第2の幅方向を向く第4の絞り外表面54を備える。テーパ部41では、長手軸方向について幅減少開始位置E12と幅減少終了位置E13との間において、長手軸Cから第3の絞り外表面53までの第1の幅方向への距離、及び、長手軸Cから第4の絞り外表面54までの第2の幅方向への距離が、基端側から先端側に向かうにつれて減少する。このため、テーパ部41では、長手軸方向について幅減少開始位置E12と幅減少終了位置E13との間において、第1の幅方向及び第2の幅方向についての超音波プローブ8の幅(寸法)Wが、先端側に向かって減少する。超音波プローブ8は、長手軸方向について先端から幅減少開始位置E12まで長手寸法L14を有する。長手寸法L14は、長手軸方向について超音波プローブ8の先端からテーパ部41の基端(E9)までの長手寸法L11より小さい。したがって、幅減少開始位置E12は、テーパ部41の基端(E9)より先端側に位置している。ただし、テーパ部41の基端(E9)と幅減少開始位置E12との間の長手軸方向についての距離は、小さい。ある実施例では、長手寸法L14は、32mmであることが好ましい。そして、この実施例では、テーパ部41の基端(E9)と幅減少開始位置E12との間の長手軸方向についての距離は、0.5mm程度となる。本実施形態では、幅減少開始位置E12が、第3の絞り外表面53及び第4の絞り外表面54の基端となり、幅減少終了位置E13が、第3の絞り外表面53及び第4の絞り外表面54の先端となる。
超音波プローブ8は、長手軸方向について先端から幅減少終了位置E13まで長手寸法L15を有する。本実施形態では、幅減少終了位置E13は、第2の絞り終了位置E11より先端側に位置している。そして、幅減少終了位置E13が、テーパ部41の先端となる。ただし、第2の絞り終了位置(第2の絞り外表面52の先端)E11と幅減少終了位置E13との間の長手軸方向についての距離は、小さい。ある実施例では、長手寸法L15は、9mmであることが好ましい。そして、この実施例では、第2の絞り終了位置E11と幅減少終了位置E13との間の長手軸方向についての距離は、2mm程度となる。
長手軸方向についてテーパ部41の基端(E9)と第1の絞り終了位置E10との間では、長手軸Cから第1の絞り外表面51(超音波プローブ8の外周面)までの第1の交差方向(第1の垂直方向)への距離(第1の距離)δが、距離δ1まで減少する。したがって、第1の絞り終了位置(第1の絞り外表面51の先端)E10では、超音波プローブ8は、長手軸Cから第1の絞り外表面51までの第1の交差方向への距離(第1の距離)δ1を有する。距離δ1は、プローブ本体部31の先端E9での外径D6の2分の1値より小さくなる。ある実施例では、距離δ1は、0.45mm以上0.5mm以下となる。
長手軸方向についてテーパ部41の基端(E9)と第2の絞り終了位置E11との間では、第1の交差方向及び第2の交差方向についての超音波プローブ8の厚さ(寸法)Tが、厚さT1まで減少する。したがって、第2の絞り終了位置(第2の絞り外表面52の先端)E11では、超音波プローブ8は、第1の交差方向(第1の垂直方向)及び第2の交差方向(第2の垂直方向)について厚さT1を有する。厚さT1は、プローブ本体部31の先端E9での外径D6より小さくなる。ある実施例では、厚さT1は、1.7mmであることが好ましい。
長手軸方向について幅減少開始位置E12と幅減少終了位置E13との間では、第1の幅方向及び第2の幅方向についての超音波プローブ8の幅(寸法)Wが、幅寸法W1まで減少する。したがって、幅減少終了位置(第3の絞り外表面53及び第4の絞り外表面54の先端)E13では、超音波プローブ8は、第1の幅方向及び第2の幅方向について幅寸法W1を有する。幅寸法W1は、プローブ本体部31の先端E9での外径D6より小さくなる。ある実施例では、幅寸法W1は、2.8mmであることが好ましい。
前述のようにテーパ部41が構成されるため、テーパ部41では、先端側に向かうにつれて、長手軸Cに垂直な断面積が減少する。振動体ユニット20が規定の周波数範囲(例えば46kHz以上48kHz以下)で縦振動する状態では、縦振動の振動節の1つである振動節(最先端振動節)N3が被支持部38に位置し、テーパ部41の基端(E9)の近傍に位置している。そして、振動体ユニット20が規定の周波数範囲で縦振動する状態では、長手軸方向について縦振動のいずれの振動腹もテーパ部41から離れて位置している。このため、先端側に向かって断面積が減少するテーパ部41では、縦振動(超音波振動)の振幅が拡大される。ある実施例では、テーパ部41の基端(E9)に振動腹での振幅が80μmの縦振動が伝達された場合に、超音波プローブ8の先端での縦振動の振幅が140μm以上150μm以下になる。
また、本実施形態では、テーパ部41の基端(E9)から先端(E13)までの長手軸方向についてのテーパ寸法が、振動体ユニット20が規定の周波数範囲で縦振動する状態での8分の1波長(λ/8)より大きくなる。すなわち、振動体ユニット20が規定の周波数範囲で縦振動する状態での8分の1波長(λ/8)は、テーパ部41の基端(E9)から先端(E13)までの長手軸方向についてのテーパ寸法より、小さい。ある実施例では、振動体ユニット20が46kHz以上48kHz以下(規定の周波数範囲)で縦振動する状態において、振動節(最先端振動節)N3から振動腹(最先端振動腹)A2までの4分の1波長(λ/4)が34mm以上35mm以下となる。これに対し、この実施例では、テーパ部41の基端(E9)から先端(E13)までの長手軸方向についてのテーパ寸法が23.5mm程度となり、振動体ユニット20が46kHz以上48kHz以下(規定の周波数範囲)で縦振動する状態での8分の1波長より大きくなる。また、テーパ部41では、長手軸方向について基端(E9)と第1の絞り終了位置E10との間の第1の絞り寸法L12も、18mmであることが好ましい。したがって、第1の絞り寸法L12(すなわち、第1の絞り外表面51の長手軸方向についての寸法)も、振動体ユニット20が46kHz以上48kHz以下(規定の周波数範囲)で縦振動する状態での8分の1波長より大きくなる。なお、第1の絞り終了位置E10は、テーパ部41の外周面(絞り外表面51~54)において絞りが終了する位置(例えばE10,E11,E13)の中で、最も基端側に位置している。
超音波プローブ8では、テーパ部41(及びプローブ本体部31)より先端側に湾曲延設部40が設けられている。湾曲延設部40は、プローブ本体部31及びテーパ部41(すなわち、長手軸C)に対して第1の交差方向側に湾曲する状態で、延設されている。湾曲延設部40は、第1の交差方向側(湾曲延設部40が湾曲する側)を向く第1の湾曲外表面55と、第2の交差方向側(湾曲延設部40が湾曲する側とは反対側)を向く第2の湾曲外表面56と、を備える。また、湾曲延設部40は、第1の幅方向側を向く第3の湾曲外表面57と、第2の幅方向側を向く第4の湾曲外表面58と、を備える。なお、プローブ本体部31からテーパ部41を通して湾曲延設部40に超音波振動が伝達されることにより、湾曲延設部40は、プローブ本体部31及びテーパ部41と一緒に規定の周波数範囲で縦振動する。
第1の幅方向(幅方向の一方側)からの投影において、湾曲延設部40の第1の湾曲外表面55では、第1の湾曲開始位置E14より先端側の部位が、長手軸方向(プローブ本体部31)に対して第1の交差方向側に湾曲する。また、第1の幅方向からの投影において、湾曲延設部40の第2の湾曲外表面56では、第2の湾曲開始位置E15より先端側の部位が、長手軸方向に対して第1の交差方向側に湾曲する。すなわち、第1の湾曲外表面55は、第1の湾曲開始位置E14で長手軸Cに対して第1の交差方向側への湾曲を開始し、第2の湾曲外表面56は、第2の湾曲開始位置E15で長手軸Cに対して第1の交差方向側への湾曲を開始する。本実施形態では、第1の湾曲開始位置(第1の湾曲外表面55の基端)E14が、第2の湾曲開始位置(第2の湾曲外表面56の基端)E15より、先端側に位置し、長手軸方向について第2の湾曲開始位置E15から離間して位置している。このため、湾曲延設部40は、第2の湾曲開始位置E15を基端(湾曲基端)として先端側へ向かって延設されている。
超音波プローブ8は、長手軸方向について先端から湾曲延設部40の第1の湾曲開始位置E14まで長手寸法L16を有する。長手寸法L16は、長手軸方向について超音波プローブ8の先端から幅減少終了位置E13まで長手寸法L15より小さい。このため、第1の湾曲開始位置E14は、幅減少終了位置E13より先端側に位置している。ある実施例では、長手寸法L16は、8.5mmとなる。
また、超音波プローブ8では、第2の湾曲開始位置(湾曲基端)E15は、第1の湾曲開始位置E14より基端側に位置するとともに、幅減少終了位置E13より基向側に位置している。したがって、本実施形態では、湾曲延設部40の基端(E15)は、テーパ部41の先端(E13)より基端側に位置している。このため、本実施形態では、テーパ部41の一部は、湾曲延設部40の一部によって形成されている。ここで、ある実施例では、第2の湾曲開始位置(湾曲基端)E15と幅減少終了位置E13との間の長手軸方向についての寸法は1mm程度であり、幅減少終了位置E13と第1の湾曲開始位置E14との間の長手軸方向についての寸法は、0.5mm程度 となる。
長手軸方向について第1の絞り外表面51と第1の湾曲外表面55との間には、第1の交差方向を向く第1の軸平行外表面61が連続している。第1の軸平行外表面61は、第1の絞り終了位置E10と第1の湾曲開始位置E14との間で、長手軸Cに平行(略平行)に延設されている。したがって、第1の絞り終了位置E10が第1の軸平行外表面61の基端となり、第1の湾曲開始位置E14が第1の軸平行外表面61の先端となる。そして、第1の軸平行外表面61は、長手軸方向について延設寸法(第1の延設寸法)L19を有する。第1の軸平行外表面61では、第1の絞り終了位置E10から第1の湾曲開始位置E14まで、長手軸Cからの第1の交差方向への距離δが、距離δ1で略一定に保たれる。
また、長手軸方向について第2の絞り外表面52と第2の湾曲外表面56との間には、第2の交差方向を向く第2の軸平行外表面62が連続している。第2の軸平行外表面62は、第2の絞り終了位置E11と第2の湾曲開始位置E15との間で、長手軸Cに平行(略平行)に延設されている。したがって、第2の絞り終了位置E11が第2の軸平行外表面62の基端となり、第2の湾曲開始位置E15が第2の軸平行外表面62の先端となる。そして、第2の軸平行外表面62は、長手軸方向について延設寸法(第2の延設寸法)L20を有する。第1の軸平行外表面61の延設寸法L19は、第2の軸平行外表面62の延設寸法L20に比べて、大きい。第2の軸平行外表面62では、第2の絞り終了位置E11から第2の湾曲開始位置E15まで、長手軸Cからの第2の交差方向への距離δ´が、略一定に保たれる。
前述のような構成であるため、長手軸方向について第2の絞り終了位置E11と第2の湾曲開始位置(湾曲延設部40の基端)E15との間では、第1の交差方向及び第2の交差方向についての超音波プローブ8の厚さTが、厚さT1で略一定に保たれる。また、長手軸方向について幅減少終了位置E13と超音波プローブ8の先端との間では、第1の幅方向及び第2の幅方向についての超音波プローブ8の幅Wが、幅寸法W1で略一定に保たれる。
ここで、長手軸Cを通り、かつ、第1の交差方向及び第2の交差方向に対して垂直な(略垂直な)基準面(第1の基準面)Y1を規定する。テーパ部41の先端部では、長手軸Cから第1の軸平行外表面61(超音波プローブ8の外周面)までの第1の交差方向への距離(第1の距離)δ1は、第1の交差方向及び第2の交差方向についての超音波プローブ8の厚さT1の2分の1値より、小さくなる。このため、テーパ部41では、超音波プローブ8は、基準面Y1を中央面として非対称となる。そして、テーパ部41では、長手軸Cに垂直な断面での断面重心が長手軸Cより第2の交差方向側にずれる。特に、第1の絞り終了位置E10と第2の湾曲開始位置(湾曲基端)E15との間では、断面重心の長手軸Cに対する第2の交差方向側へのずれが、大きくなる。また、長手軸Cを通り、かつ、第1の幅方向及び第2の幅方向に対して垂直な(略垂直な)基準面(第2の基準面)Y2を規定する。テーパ部41では、超音波プローブ8は、基準面Y2を中央面として略対称となる。
湾曲延設部40は、湾曲延設部40の基端である第2の湾曲開始位置E15から先端側へ向かって延設され、プローブ本体部31及びテーパ部41に対して第1の交差方向側へ湾曲する第1の湾曲延設部42を備える。第1の幅方向(幅方向の一方側)からの投影において、第1の湾曲延設部42の外周面の第1の交差方向側を向く部位では、第1の湾曲開始位置E14での接線が長手軸方向に対して鋭角θ1を有する。また、第1の幅方向からの投影において、第1の湾曲延設部42の外周面の第2の交差方向側を向く部位では、第2の湾曲開始位置(湾曲基端)E15での接線が長手軸方向に対して鋭角θ2を有する。鋭角θ1及び鋭角θ2は、0°より大きく10°以下となる。ある実施例では、鋭角θ1が5°で、鋭角θ2が5°となる。
湾曲延設部40では、第1の湾曲延設部42の先端側に、第2の湾曲延設部45が連続している。第2の湾曲延設部45は、第1の湾曲延設部42に対して第1の交差方向側に湾曲する状態で延設されている。第1の幅方向(幅方向の一方側)からの投影において、第2の湾曲延設部45の外周面の第1の交差方向側を向く部位は、角R1の円弧状に延設されている。また、第1の幅方向からの投影において、第2の湾曲延設部45の外周面の第2の交差方向側を向く部位は、角R2の円弧状に延設されている。
角R1の円弧及び角R2の円弧の中心O1は、湾曲延設部40(超音波プローブ8)より第1の交差方向側に位置している。このため、第1の幅方向(第2の幅方向)からの投影において、第2の湾曲延設部45の外周面の第1の交差方向側を向く部位では、長手軸方向に対する鋭角が先端側に向かうにつれて大きくなる。同様に、第1の幅方向(第2の幅方向)からの投影において、第2の湾曲延設部45の外周面の第2の交差方向側を向く部位では、長手軸方向に対する鋭角が先端側に向かうにつれて大きくなる。したがって、第2の湾曲延設部45では、長手軸方向に対する鋭角が先端側に向かうにつれて大きくなる。
第2の湾曲延設部45の外周面の第1の交差方向側を向く部位では、先端での接線が、長手軸方向に対して鋭角θ3を有する。また、第2の湾曲延設部45の外周面の第2の交差方向側を向く部位では、先端での接線が、長手軸方向に対して鋭角θ4を有する。すなわち、第1の湾曲外表面55の先端で、湾曲延設部40は、長手軸方向に対して鋭角θ3を有する。そして、第2の湾曲外表面56の先端で、湾曲延設部40は、長手軸方向に対して鋭角θ4を有する。ある実施例では、角R1が15mmとなり、鋭角θ3が15°となる。また、角R2に対応させて、鋭角θ4が規定される。例えば、角R2が16.5mmの場合は、鋭角θ4が20°となる。ある実施例では、第2の湾曲外表面56(第2の湾曲延設部45の外周面の第2の交差方向側を向く部位)では、先端での接線の長手軸方向に対する鋭角θ4が、10°以上30°以下となり、20°以上25°以下となることが好ましい。
また、超音波プローブ8において延設方向に垂直で(略垂直で)、かつ、幅方向に垂直な(略垂直な)方向を厚さ方向とする。湾曲延設部40では、超音波プローブ8の延設方向が長手軸に対して平行でないため、湾曲延設部40では、厚さ方向は第1の交差方向及び第2の交差方向に対して平行ではない。超音波プローブ8は、長手軸方向について第1の湾曲開始位置E14から先端まで、厚さ方向について厚さ寸法T2で略一定に保たれる。すなわち、第1の湾曲開始位置E14と超音波プローブ8の先端との間では、第1の湾曲外表面55と第2の湾曲外表面56との間の距離である厚さ寸法T2が、略一定に保たれる。ある実施例では、厚さ寸法T2は、1.5mmである。したがって、第1の湾曲開始位置E14から先端まで超音波プローブ8の厚さ寸法T2が略一定になる状態に、鋭角θ1~θ4及び角R1,R2が決定される。
また、第2の湾曲延設部45の外周面の第1の交差方向側を向く部位は、先端において長手軸Cからの第1の交差方向への離間距離T3を有する。ある実施例では、離間距離T3は、1.9mmであることが好ましい。
第2の湾曲延設部45は、超音波プローブ8の先端を形成する先端面46を備える。第1の幅方向(幅方向の一方側)からの投影において、第1の湾曲外表面55(第2の湾曲延設部45の外周面の第1の交差方向側を向く部位)と先端面46との間は、角R3の曲面状に形成されている。また、第1の幅方向からの投影において、第2の湾曲外表面56(第2の湾曲延設部45の外周面の第2の交差方向側を向く部位)と先端面46との間は、角R4の曲面状に形成されているまた、第2の交差方向(交差方向の一方側)からの投影において、第3の湾曲外表面57(第2の湾曲延設部45の外周面の第1の幅方向側を向く部位)と先端面46との間、及び、第4の湾曲外表面58(第2の湾曲延設部45の外周面の第2の幅方向側を向く部位)と先端面46との間は、角R5の曲面状に形成されている。
図5は、第2の湾曲延設部45(湾曲延設部40の先端部)を第1の幅方向側から視た図である。そして、図6は、図5のVI-VI線断面図であり、湾曲延設部40の延設方向に垂直な断面を示している。
図3乃至図6に示すように、第2の湾曲延設部45には、切削面(処置面)47~49が、設けられている。第1の切削面47は、第2の湾曲外表面56(湾曲延設部40の外表面において第2の交差方向側を向く部位)に、設けられている。そして、第2の切削面48は、第3の湾曲外表面57(湾曲延設部40の外表面において第1の幅方向側を向く部位)に設けられ、第3の切削面49は、第4の湾曲外表面58(湾曲延設部40の外表面において第2の幅方向側を向く部位)に設けられている。切削面47~49のそれぞれでは、後述する複数の溝が形成されている。また、切削面47~49のそれぞれは、湾曲延設部40の先端(先端面46)から基端側へ向かって延設されている。第1の切削面47は、第2の湾曲延設部45で、かつ、第2の湾曲外表面56に設けられている。このため、第1の幅方向及び前記第2の幅方向のそれぞれからの投影において、第1の切削面47は、湾曲延設部40より第1の交差方向側に中心(O1)が位置する円弧状に形成される。
第2の湾曲延設部45は、第1の切削面47と第1の湾曲外表面55との間に、湾曲延設部40の厚さ方向についての厚さ寸法T6を有する。第1の切削面47と第1の湾曲外表面55との間の厚さ寸法T6は、厚さ寸法T2と略同一の大きさとなる。また、第2の湾曲延設部45は、第2の切削面48(第3の湾曲外表面57)と第3の切削面49(第4の湾曲外表面58)との間に、第1の幅方向及び第2の幅方向についての幅寸法W5を有する。第2の切削面48と第3の切削面49との間の幅寸法W5は、幅寸法W1と略同一の大きさとなる。このため、第1の切削面47が延設される範囲(第2の湾曲延設部45)では、第1の切削面47と第1の湾曲外表面55との間の湾曲延設部40の厚さ方向についての厚さ寸法T6(T2)は、第3の湾曲外表面57と第4の湾曲外表面58との間での第1の幅方向及び第2の幅方向についての幅寸法W5(W1)より、小さい。
第2の切削面48には、複数(本実施形態では6つ)の延設溝(第1の延設溝)63A~63Fが形成されている。延設溝63A~63Fのそれぞれは、湾曲延設部40の延設方向に対して略垂直に延設され、本実施形態では、湾曲延設部40の厚さ方向に沿って延設されている。また、延設溝63A~63Fは、湾曲延設部40の延設方向について並設されている。延設溝63A~63Fのそれぞれは、湾曲延設部40の延設方向について隣設する延設溝(63A~63Fの対応する1つまたは2つ)との間に鋭角γ1有する。すなわち、延設溝63A~63Fのそれぞれの延設方向は、隣設する延設溝(63A~63Fの対応する1つまたは2つ)の延設方向に対して、鋭角γ1だけずれる。また、延設溝63A~63Fの中で最も基端側に位置する最基端延設溝63Fを規定する。最基端延設溝63Fの延設方向は、基端側に対して鈍角θ8を有する。ある実施例では、鋭角γ1は3°であり、鈍角θ8は95°である。
前述のように延設溝(第1の延設溝)63A~63Fが延設されるため、第1の幅方向からの投影において、延設溝63A~63Fは、湾曲延設部40より第1の交差方向側に中心(O1)が位置する円弧状の第1の切削面47に対して直交する状態で、第2の切削面48に延設される。したがって、本実施形態では、第1の幅方向からの投影において、延設溝63A~63Fのそれぞれは、第1の切削面47との間に角度α3を形成し、角度α3は90°となる。そして、延設溝63A~63Fは、第1の切削面47の円弧の中心(O1)において交差する。延設溝63A~63Fのそれぞれは、幅φ3を有するとともに、深さW3を有する。ある実施例では、幅φ3が0.5mmとなるとともに、深さW3が0.35mmとなる。
第3の切削面49には、複数(本実施形態では6つ)の延設溝(第2の延設溝)65A~65Fが形成されている。延設溝(第2の延設溝)65A~65Fのぞれぞれは、基準面Y2を中央面として対応する延設溝(63A~63Fの対応する1つ)と略対称となる。このため、第2の幅方向からの投影において、延設溝65A~65Fは、湾曲延設部40より第1の交差方向側に中心が位置する円弧状の第1の切削面47に対して直交する状態で、第3の切削面49に延設される。また、延設溝63A~63Fと同様に、延設溝65A~65Fに関連して、鋭角γ1、鈍角θ8、幅φ3及び深さW3が規定される。また、第2の湾曲延設部45は、延設溝63A~63Fのそれぞれの底位置から対応する延設溝(65A~65Fの対応する1つ)の底位置まで、第1の幅方向及び第2の幅方向について幅方向寸法W4を有する。ある実施例では、幅方向寸法W4は、2.1mm以上2.15mm以下となる。
また、第1の切削面47には、複数(本実施形態では6つ)の中継溝71A~71Fが形成されている。中継溝71A~71Fのそれぞれは、湾曲延設部40の延設方向に対して略垂直に延設され、本実施形態では湾曲延設部40の幅方向(第1の幅方向及び第2の幅方向)に沿って延設されている。中継溝71A~71Fのそれぞれの一端は、対応する延設溝(63A~63Fの対応する1つ)と連続し、中継溝71A~71Fのそれぞれの他端は、対応する延設溝(65A~65Fの対応する1つ)と連続する。中継溝71A~71Fは、延設溝63A~63F,65A~65Fと同一の幅φ3を有するとともに、深さT5を有する。ある実施例では、深さT5は、0.3mm以上0.35mm以下となる。また、第2の切削面48側(幅方向の一方側)から視て中継溝71A~71Fのそれぞれの底面は、角φ3/2の円弧状に形成されている。
第2の湾曲延設部45では、延設方向に垂直な断面において、第1の湾曲外表面55(外表面の第1の交差方向側を向く部位)と第2の切削面48との間、及び、第1の湾曲外表面55と第3の切削面49との間が角R6の曲面状に形成されている。また、第2の湾曲延設部45では、延設方向に垂直な断面において、第1の切削面47と第2の切削面48との間、及び、第1の切削面47と第3の切削面49との間が角R7の曲面状に形成されている。
角R6の曲面部分は、長手軸方向について図3の範囲S1に渡って形成され、角R7の曲面部分は、長手軸方向について図3の範囲S2に渡って形成されている。すなわち、角R6の曲面部分及び角R7の曲面部分は、長手軸方向について超音波プローブ8の先端からテーパ部41まで延設され、超音波プローブ8においてシース7の先端からの突出部分(露出部分)に、角R6の曲面部分及び角R7の曲面部分が形成されている。このため、テーパ部41の一部及び湾曲延設部40では、延設方向に垂直な断面において、外表面の第1の交差方向側を向く部位と外表面の第1の幅方向側を向く部位との間、及び、外表面の第1の交差方向側を向く部位と外表面の第2の幅方向側を向く部位との間が、角R6の曲面状に形成される。そして、テーパ部41の一部及び湾曲延設部40では、延設方向に垂直な断面において、外表面の第2の交差方向側を向く部位と外表面の第1の幅方向側を向く部位との間、及び、外表面の第2の交差方向側を向く部位と外表面の第2の幅方向側を向く部位との間が、角R7の曲面状に形成される。
また、超音波プローブ8では、第2の湾曲延設部45の延設方向に垂直な断面において、中継溝71A~71Fのそれぞれと対応する延設溝(63A~63Fの対応する1つ)との間、及び、中継溝71A~71Fのそれぞれと対応する延設溝(65A~65Fの対応する1つ)との間が角R8の曲面状に形成されている。ある実施例では、角R8が0.55mmである。
次に、本実施形態の超音波プローブ8の作用及び効果について説明する。図7及び図8は、超音波処置システム1を用いて肩関節100において骨を切削している状態を示す図である。図7は、肩関節100を前方側(胸側)から視た図であり、図8は、肩関節100を後方側(背中側)から視た図である。図7及び図8に示すように、肩関節100は、上腕骨101と肩甲骨102との間の関節である。肩甲骨102は、肩峰103を備える。肩峰103には、鎖骨105が連結される。肩甲骨102からは、肩甲下筋106、棘上筋107、棘下筋108及び小円筋109が起始する。肩峰103の下側には、肩甲下筋106、棘上筋107、棘下筋108及び小円筋109の腱として回旋筋腱板111が形成されている。回旋筋腱板111から上腕骨101が延設されている。また、肩峰103の下面112と回旋筋腱板111との間には、腔113が形成されている。
本実施形態では、関節腔等の狭い空間において骨等の硬性組織を切削する際に、超音波処置具2が用いられる。例えば、肩峰103と回旋筋腱板111との間の腔113において切削を行う際には、肩峰103と回旋筋腱板111との間の腔113に硬性鏡(関節鏡)115の先端部及び超音波プローブ8の先端部を挿入する。硬性鏡115及び超音波プローブ8のそれぞれは、人体の外から腔113へ、前方側の挿入箇所、側方側の挿入箇所及び後方側の挿入箇所のいずれかを通して挿入される。ただし、硬性鏡115の挿入箇所は、超音波プローブ8の挿入箇所とは異なる。図7及び図8では、前方側の挿入箇所から硬性鏡115が腔113に挿入され、側方側の挿入箇所から超音波プローブ8が腔113に挿入される。そして、硬性鏡115による観察下で腔113において超音波プローブ8の切削面47~49のいずれかを肩峰103の下面112に接触させる。切削面47~49のいずれかが肩峰103の下面112に接触する状態において切削面47~49に超音波振動が伝達されることにより、肩峰103の下面112において骨棘(骨)の切削が行われる。なお、肩峰103の下面112においての骨棘の切削は、第2の湾曲延設部45を液体(生理食塩水)に浸した状態で行われる。
図9及び図10は、超音波プローブ8の第2の湾曲延設部45の第1の切削面47が肩峰103の下面112に接触している状態を示す図である。図10では、肩峰103の下面112において図9とは異なる位置で第1の切削面47を接触させている。ここで、超音波プローブ8では、長手軸Cに沿って延設されるプローブ本体部31に対して第1の湾曲延設部42が第1の垂直方向側に湾曲し、第2の湾曲延設部45が第1の湾曲延設部42に対してさらに第1の垂直方向側に湾曲している。そして、第2の湾曲延設部45では、長手軸方向に対する鋭角が先端側に向かうにつれて大きくなり、第2の湾曲延設部45で、かつ、第2の湾曲外表面56に、第1の切削面47が設けられる。このため、本実施形態では、第1の幅方向及び前記第2の幅方向のそれぞれからの投影において、第1の切削面47は、湾曲延設部40より第1の交差方向側に中心(O1)が位置する円弧状に形成される。肩峰103と回旋筋腱板111との間の腔113は狭く、肩峰103の下面112は曲面状に形成されている。前述のように第1の湾曲延設部42及び第2の湾曲延設部45を形成することにより、曲面状に形成される肩峰103の下面112にも、適切に第1の切削面47を接触させることができる。
例えば、図9及び図10では、肩峰103の下面112において第1の切削面47と接触する位置が互いに対して異なるため、肩峰103の下面112に対する第1の切削面47の接触角が異なる。本実施形態では、前述のように第1の湾曲延設部42及び第2の湾曲延設部45が形成されるため、肩峰103の下面112に対する第1の切削面47の接触角が変化しても、第1の切削面47を適切に肩峰103の下面112に接触させることが可能となる。例えば、図9及び図10のいずれにおいても、第1の切削面47が肩峰103の下面112に適切に接触する。すなわち、肩峰103の下面112のいかなる位置においても(すなわち、肩峰103の下面112に対する第1の切削面47の接触角がいかなる角度であっても)、第1の切削面47を適切に肩峰103の下面112に接触させることができる。
また、本実施形態では、第1の切削面47は、湾曲延設部40の第2の湾曲外表面56に設けられ、第2の湾曲外表面56(湾曲延設部40の外周面の第2の交差方向側を向く部位)では、先端での接線の長手軸方向に対する鋭角θ4が、10°以上30°以下(好ましくは20°以上25°以下)となる。鋭角θ4を10°以上30°以下(特に20°以上25°以下)にすることにより、第1の切削面47が肩峰103の下面112に対応する形状となり、肩峰103の下面112のいかなる位置においても、第1の切削面47をさらに容易かつ適切に肩峰103の下面112に接触させることができる。
また、第1の切削面47では、中継溝71A~71Fは、湾曲延設部40の延設方向(すなわち、縦振動による振動方向)に対して略垂直に延設されている。縦振動による振動方向に対して略垂直に中継溝71A~71Fが延設されるため、第1の切削面47を接触させた状態で第2の湾曲延設部45が超音波振動によって縦振動することにより、適切に骨(骨棘)が切削される。すなわち、硬い骨を適切に切削することができる。
前述のように本実施形態では、肩峰103と回旋筋腱板111との間の腔113等の関節腔、すなわち狭い空間においても、第1の切削面47を硬性組織に接触させ易く、第1の切削面47で硬性組織が適切に切削される。すなわち、狭い空間においても、硬性組織へアクセス性、及び、硬性組織の切削性が確保される。
また、本実施形態では、第2の切削面48又は第3の切削面49を肩峰103の下面112に接触させて骨を切削してもよい。また、第1の切削面47を肩峰103の下面112に接触させて骨(骨棘)を切削する際には、第1の切削面47によって切削される箇所の近傍において、第2の切削面48及び第3の切削面49によって、骨が切削される。切削面48,49によって骨が切削されることにより、第1の切削面47によって切削された箇所のみが凹むことが防止され、肩峰103の下面112において段差が形成されることが防止される。
また、第2の切削面48の延設溝63A~63F及び第3の切削面49の延設溝65A~65Fは、超音波プローブ8の延設方向(すなわち、縦振動による振動方向)に対して略垂直に(湾曲延設部40の厚さ方向に沿って)延設されている。縦振動による振動方向に対して略垂直に延設溝(第1の延設溝)63A~63Fが延設されるため、超音波振動を用いて第2の切削面48で切削する際に、骨の切削性が向上する。同様に、縦振動による振動方向に対して略垂直に延設溝(第2の延設溝)65A~65Fが延設されるため、超音波振動を用いて第3の切削面49で切削する際に、骨の切削性が向上する。
また、第2の切削面48には、円弧状の第1の切削面47に対して直交する状態で、延設溝(第1の延設溝)63A~63Fが延設され、第3の切削面49には、円弧状の第1の切削面47に対して直交する状態で、延設溝(第2の延設溝)65A~65Fが延設されている。このため、第2の切削面48又は第3の切削面49で切削する際に、骨の切削性が向上する。
また、中継溝71A~71Fのそれぞれは、対応する延設溝(63A~63Fの対応する1つ)及び対応する延設溝(65A~65Fの対応する1つ)と連続している。このため、切削面47~49で骨を切削する際に、骨がムラなく均一に切削され、切削性がさらに向上する。
また、本実施形態では、中継溝71A~71Fのそれぞれと対応する延設溝(63A~63Fの対応する1つ)との間、及び、中継溝71A~71Fのそれぞれと対応する延設溝(65A~65Fの対応する1つ)との間が角R8の曲面状に形成されている。このため、中継溝71A~71Fのそれぞれと対応する延設溝(63A~63Fの対応する1つ)との間、及び、中継溝71A~71Fのそれぞれと対応する延設溝(65A~65Fの対応する1つ)との間において、骨が切削されずに切残ることが、有効に防止される。
また、本実施形態では、第1の絞り外表面51の先端(第1の絞り終了位置E10)が、第2の絞り外表面52の先端(第2の絞り終了位置E11)に比べて、基端側に位置し、第1の軸平行外表面61の延設寸法L19は、第2の軸平行外表面62の延設寸法L20に比べて、大きい。このため、第1の切削面47を肩峰103の下面112に接触可能な位置まで移動させる際に、湾曲延設部40及びテーパ部41において外表面の第1の交差方向側を向く部位(背面側の部位)が、処置対象(肩峰103の下面)以外の生体組織等に接触し難くなる。したがって、第1の切削面47を肩峰103の下面112に接触可能な位置まで、移動させ易くなる。
また、本実施形態では、第2の湾曲外表面56の第2の湾曲開始位置E15に対して、第1の湾曲外表面55の第1の湾曲開始位置E14が先端側に位置している。このため、第1の切削面47を肩峰103の下面112に接触可能な位置まで移動させる際に、湾曲延設部40及びテーパ部41において外表面の第1の交差方向側を向く部位(背面側の部位)が、処置対象(肩峰103の下面)以外の生体組織等にさらに接触し難くなる。したがって、第1の切削面47を肩峰103の下面112に接触可能な位置まで、さらに移動させ易くなる。
図11は、振動体ユニット20が規定の周波数範囲で縦振動する状態での、先端側から2番目の振動腹A3と最も先端側の振動腹A2との間における、縦振動の振幅V及び超音波振動による応力σを示している。図11では、横軸に長手軸方向についての位置を示し、縦軸に振幅V及び応力σを示している。また、図11では、縦振動の振幅Vの変化を実線で示し、応力σの変化を一点鎖線で示している。
図11に示すように、振動体ユニット20が規定の周波数範囲で縦振動する状態では、最も先端側の振動節N3より先端側にテーパ部41が位置し、テーパ部41で縦振動の振幅Vが拡大される。例えば、振動腹での振幅が80μmの縦振動が、テーパ部41によって、振動腹での振幅が140μm以上150μm以下の縦振動に拡大される。また、超音波振動による応力σは、振動節及び超音波振動の伝達方向に垂直な断面積が減少する部分で大きくなり、振動腹でゼロとなる。したがって、図11に示すように、振動節N3からテーパ部41の先端(E13)との間において、応力σが大きくなる。
ここで、本実施形態では、テーパ部41の基端(E9)から先端(E13)までの長手軸方向についての寸法が、振動体ユニット20が規定の周波数範囲で縦振動する状態での8分の1波長(λ/8) より大きくなる。そして、テーパ部41では、長手軸方向について基端(E9)と第1の絞り終了位置E10との間の第1の絞り寸法L12も振動体ユニット20が規定の周波数範囲で縦振動する状態での8分の1波長より大きくなる。テーパ部41の基端(E9)から先端(E13)までの長手軸方向についての寸法が大きくなることにより、振動節N3からテーパ部41の先端(E13)との間の全長に渡って、超音波振動による応力σが略均一に保たれる。すなわち、振動節N3からテーパ部41の先端(E13)との間において、応力が局所的に大きくなることが(すなわち、ピークが発生することが)、有効に防止される。例えば、ある実施例では、振動腹での振幅が大きくなる(例えば80μmの)縦振動がテーパ部41の基端(E9)に伝達されても、振動体ユニット20が規定の周波数範囲(例えば46kHz以上48kH以下)で縦振動する状態では、振動節N3からテーパ部41の先端(E13)との間において応力σが300Mpa程度で略均一に保たれる。すなわち、本実施形態では、振動節N3からテーパ部41の先端(E13)との間において、(例えば、テーパ部41の先端(E13)で、)応力が局所的に700Mpa程度まで大きくなることが防止される。応力σが局所的に大きくなることが防止されるため、超音波振動による超音波プローブ8の破損を有効に防止することができる。
また、本実施形態では、テーパ部41において、長手軸Cに垂直な断面での断面重心が長手軸Cより第2の垂直方向側にずれる。特に、第1の絞り終了位置E10と第2の湾曲開始位置(湾曲基端)E15との間では、断面重心の長手軸Cに対する第2の交差方向側へのずれが、大きくなる。このため、本実施形態では、湾曲延設部40の長手軸方向に対する湾曲に起因する第1の交差方向側への重心のずれが、テーパ部41に起因する第2の交差方向側への重心のずれによって、打消される。これにより、超音波プローブ8が超音波振動を先端側に伝達している状態において、縦振動以外の不正振動(横振動、ねじれ振動)の発生を低減させることができる。
本実施形態では、第1の幅方向(幅方向の一方側)からの投影において、第1の湾曲外表面55と先端面46との間は、角R3の曲面状に形成されている。また、第1の幅方向からの投影において、第2の湾曲外表面56と先端面46との間は、角R4の曲面状に形成されている。そして、第2の交差方向(交差方向の一方側)からの投影において、第3の湾曲外表面57と先端面46との間、及び、第4の湾曲外表面58と先端面46との間は、角R5の曲面状に形成されている。これにより、超音波プローブ8の先端面46では、超音波プローブ8の延設方向(すなわち、縦振動の振動方向)に対して垂直な表面(外表面)の割合が小さくなる。縦振動の振動方向に対して垂直な表面の割合が小さくなることにより、第2の湾曲延設部45を液体(生理食塩水)に浸した状態で超音波プローブ8を縦振動させても、先端面46の近傍でのキャビテーションの発生が低減される。キャビテーションの発生が低減されることにより、処置における術者の視認性が向上する。
また、超音波プローブ8においてシース7の先端からの突出部分(露出部分)では、延設方向に垂直な断面において、外表面の第1の交差方向側を向く部位と外表面の第1の幅方向側を向く部位との間、及び、外表面の第1の交差方向側を向く部位と外表面の第2の幅方向側を向く部位との間が、角R6の曲面状に形成される。そして、超音波プローブ8においてシース7の先端からの突出部分(露出部分)では、延設方向に垂直な断面において、外表面の第2の交差方向側を向く部位と外表面の第1の幅方向側を向く部位との間、及び、外表面の第2の交差方向側を向く部位と外表面の第2の幅方向側を向く部位との間が、角R7の曲面状に形成される。このため、テーパ部41及び湾曲延設部40の外周面において、角が形成されない。したがって、超音波プローブ8においてシース7の先端からの突出部分(露出部分)が処置対象以外の生体組織等に接触しても、生体組織の損傷を有効に防止することができる。
(変形例)
前述の実施形態等では、超音波プローブ(8)は、長手軸(C)に沿って延設され、基端側から先端側へ超音波振動を伝達するプローブ本体部(31)と、プローブ本体部(31)に対して先端側に設けられ、長手軸(C)に交差するある1つの方向を第1の交差方向(P1)とした場合に、プローブ本体部に対して第1の交差方向側へ湾曲する状態で延設される湾曲延設部(40)と、を備える。湾曲延設部(40)は、第1の交差方向(P1)側を向く第1の湾曲外表面(55)と、第1の交差方向(P1)とは反対方向を第2の交差方向(P2)とした場合に、第2の交差方向(P2)側を向く第2の湾曲外表面(56)と、長手軸(C)に交差し、かつ、第1の交差方向(P1)及び第2の交差方向(P2)に垂直な2方向を第1の幅方向(B1)及び第2の幅方向(B2)とした場合に、第1の幅方向(B1)側を向く第3の湾曲外表面(57)と、第2の幅方向(B2)側を向く第4の湾曲外表面(58)と、を備える。第2の湾曲外表面(56)に形成される第1の切削面(47)は、第1の幅方向(B1)及び第2の幅方向(B2)のそれぞれからの投影において、湾曲延設部(40)より第1の交差方向(P1)側に中心(O1)が位置する円弧状に形成される。第3の湾曲外表面(57)に形成される第2の切削面(48)では、湾曲延設部(40)の厚さ方向に沿って第1の延設溝(63A~63F)が延設され、第4の湾曲外表面(58)に形成される第3の切削面(49)では、湾曲延設部(40)の厚さ方向に沿って第2の延設溝(65A~65F)が延設されている。第1の切削面(48)に延設される中継溝(71A~71F)は、一端が第1の延設溝(63A~63F)と連続し、他端が第2の延設溝(65A~65F)と連続する。
前述の実施形態等では、超音波プローブ(8)は、長手軸(C)に沿って延設され、基端側から先端側へ超音波振動を伝達するプローブ本体部(31)と、プローブ本体部(31)に対して先端側に設けられ、長手軸(C)に交差するある1つの方向を第1の交差方向(P1)とした場合に、プローブ本体部に対して第1の交差方向側へ湾曲する状態で延設される湾曲延設部(40)と、を備える。湾曲延設部(40)は、第1の交差方向(P1)側を向く第1の湾曲外表面(55)と、第1の交差方向(P1)とは反対方向を第2の交差方向(P2)とした場合に、第2の交差方向(P2)側を向く第2の湾曲外表面(56)と、長手軸(C)に交差し、かつ、第1の交差方向(P1)及び第2の交差方向(P2)に垂直な2方向を第1の幅方向(B1)及び第2の幅方向(B2)とした場合に、第1の幅方向(B1)側を向く第3の湾曲外表面(57)と、第2の幅方向(B2)側を向く第4の湾曲外表面(58)と、を備える。第2の湾曲外表面(56)に形成される第1の切削面(47)は、第1の幅方向(B1)及び第2の幅方向(B2)のそれぞれからの投影において、湾曲延設部(40)より第1の交差方向(P1)側に中心(O1)が位置する円弧状に形成される。第3の湾曲外表面(57)に形成される第2の切削面(48)では、湾曲延設部(40)の厚さ方向に沿って第1の延設溝(63A~63F)が延設され、第4の湾曲外表面(58)に形成される第3の切削面(49)では、湾曲延設部(40)の厚さ方向に沿って第2の延設溝(65A~65F)が延設されている。第1の切削面(48)に延設される中継溝(71A~71F)は、一端が第1の延設溝(63A~63F)と連続し、他端が第2の延設溝(65A~65F)と連続する。
以上、本発明の実施形態等について説明したが、本発明は前述の実施形態等に限るものではなく、発明の趣旨を逸脱することなく種々の変形ができることは、もちろんである。
Claims (13)
- 肩関節を超音波振動で処置するために、前記超音波振動を伝達する肩関節用の超音波プローブであって、
長手軸に沿って延設され、基端側から先端側へ前記超音波振動を伝達するプローブ本体部と、
前記プローブ本体部に対して前記先端側に設けられ、前記長手軸に交差するある1つの方向を第1の交差方向とした場合に、前記プローブ本体部に対して第1の交差方向側へ湾曲する状態で延設される湾曲延設部と、
前記湾曲延設部において前記第1の交差方向側を向く第1の湾曲外表面と、
前記第1の交差方向とは反対方向を第2の交差方向とした場合に、前記湾曲延設部において第2の交差方向側を向く第2の湾曲外表面と、
前記長手軸に交差し、かつ、前記第1の交差方向及び前記第2の交差方向に垂直な2方向を第1の幅方向及び第2の幅方向とした場合に、前記湾曲延設部において第1の幅方向側を向く第3の湾曲外表面と、
前記湾曲延設部において第2の幅方向側を向く第4の湾曲外表面と、
前記第2の湾曲外表面において複数の溝から形成されるとともに、処置対象を切削し、前記第1の幅方向及び前記第2の幅方向のそれぞれからの投影において、前記湾曲延設部より前記第1の交差方向側に中心が位置する円弧状に形成される第1の切削面と、
前記第3の湾曲外表面に形成されるとともに、前記処置対象を切削し、前記湾曲延設部の厚さ方向に沿って延設される第1の延設溝を備える第2の切削面と、
前記第4の湾曲外表面に形成されるとともに、前記処置対象を切削し、前記湾曲延設部の厚さ方向に沿って延設される第2の延設溝を備える第3の切削面と、
前記第1の切削面に延設されるとともに、一端が第1の延設溝と連続し、他端が第2の延設溝と連続する中継溝と、
を具備する超音波プローブ。 - 前記第1の延設溝は、前記第1の幅方向からの前記投影において、円弧状の前記第1の切削面に直交し、
前記第2の延設溝は、前記第2の幅方向からの前記投影において、円弧状の前記第1の切削面に直交する、
請求項1の超音波プローブ。 - 前記第2の湾曲外表面の先端での接線の長手軸方向に対する鋭角は、20°以上25°以下となる、請求項1の超音波プローブ。
- 前記湾曲延設部は、
前記プローブ本体部に対して前記第1の交差方向側へ湾曲する状態で延設される第1の湾曲延設部と、
前記第1の湾曲延設部の前記先端側に連続するとともに、前記第1の湾曲延設部に対して前記第1の交差方向側に湾曲する状態で延設され、長手軸方向に対する鋭角が前記先端側に向かうにつれて大きくなる第2の湾曲延設部と、
を備える、請求項1の超音波プローブ。 - 前記第1の切削面、前記第2の切削面及び前記第3の切削面は、前記第2の湾曲延設部に設けられる、請求項4の超音波プローブ。
- 前記第1の切削面が延設される範囲では、前記第1の切削面と前記第1の湾曲外表面との間の前記湾曲延設部の厚さ方向についての厚さ寸法は、前記第3の湾曲外表面と前記第4の湾曲外表面との間での前記第1の幅方向及び前記第2の幅方向についての幅寸法より、小さい、請求項1の超音波プローブ。
- 前記第1の湾曲外表面が前記長手軸に対して前記第1の交差方向側への湾曲を開始する第1の湾曲開始位置は、前記第2の湾曲外表面が前記長手軸に対して前記第1の交差方向側への湾曲を開始する第2の湾曲開始位置に比べ、前記先端側に位置する、請求項1の超音波プローブ。
- 前記プローブ本体部及び前記湾曲延設部は、前記プローブ本体部から前記湾曲延設部へ前記超音波振動が伝達されている状態において、規定の周波数範囲で振動し、
前記プローブ本体部及び前記湾曲延設部が前記規定の周波数範囲で振動している状態において、振動節の中で最も前記先端側に位置する最先端振動節は、前記湾曲延設部の基端に比べて、前記基端側に位置する、
請求項1の超音波プローブ。 - 長手軸方向について前記プローブ本体部と前記湾曲延設部との間に設けられるとともに、前記基端側から前記先端側に向かうにつれて、前記長手軸に垂直な断面積が減少し、前記プローブ本体部から前記湾曲延設部へ向かって前記超音波振動を伝達している状態において、前記プローブ本体部及び前記湾曲延設部と一緒に前記規定の周波数範囲で振動するテーパ部をさらに具備し、
前記プローブ本体部、前記湾曲延設部及び前記テーパ部が前記規定の周波数範囲で振動している状態において、前記最先端振動節は、前記テーパ部の基端より基端側に位置するとともに、振動の8分の1波長は、前記テーパ部の前記基端から前記テーパ部の先端までの前記長手軸方向についてのテーパ寸法より小さい、
請求項8の超音波プローブ。 - 前記第1の交差方向側を向くとともに、長手軸方向について前記プローブ本体部と前記第1の湾曲外表面との間に設けられ、前記基端側から前記先端側に向かうにつれて、前記長手軸からの前記第1の交差方向への第1の距離が減少する第1の絞り外表面と、
前記第2の交差方向側を向くとともに、前記長手軸方向について前記プローブ本体部と前記第2の湾曲外表面との間に設けられ、前記基端側から前記先端側に向かうにつれて、前記長手軸からの前記第2の交差方向への第2の距離が減少する第2の絞り外表面と、
前記第1の交差方向側を向くとともに、前記長手軸方向について前記第1の絞り外表面と前記第1の湾曲外表面との間に連続し、前記長手軸に平行に延設される第1の軸平行外表面と、
前記第2の交差方向側を向くとともに、前記長手軸方向について前記第2の絞り外表面と前記第2の湾曲外表面との間に連続し、前記長手軸に平行に延設される第2の軸平行外表面と、
をさらに具備する請求項1の超音波プローブ。 - 前記第1の軸平行外表面の前記長手軸方向についての第1の延設寸法は、前記第2の軸平行外表面の前記長手軸方向についての第2の延設寸法に比べて、大きい、請求項10の超音波プローブ。
- 前記第1の絞り外表面の前記長手軸方向に対する第1の絞り角は、前記第2の絞り外表面の前記長手軸方向に対する第2の絞り角に比べて、大きい、請求項10の超音波プローブ。
- 前記第1の絞り外表面の先端は、前記第2の絞り外表面の先端に比べて、前記基端側に位置する、請求項10の超音波プローブ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201580027608.6A CN106456228B (zh) | 2015-01-07 | 2015-09-15 | 超声波探头及超声波处理器具 |
| EP15876928.1A EP3243466B1 (en) | 2015-01-07 | 2015-09-15 | Ultrasonic probe |
| JP2016522082A JP6001214B1 (ja) | 2015-01-07 | 2015-09-15 | 超音波プローブ |
| US15/332,550 US9730710B2 (en) | 2015-01-07 | 2016-10-24 | Ultrasonic probe and ultrasonic instrument |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015001840 | 2015-01-07 | ||
| JP2015-001840 | 2015-01-07 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/332,550 Continuation US9730710B2 (en) | 2015-01-07 | 2016-10-24 | Ultrasonic probe and ultrasonic instrument |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016111055A1 true WO2016111055A1 (ja) | 2016-07-14 |
Family
ID=56355763
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/076188 WO2016111055A1 (ja) | 2015-01-07 | 2015-09-15 | 超音波プローブ |
| PCT/JP2015/076186 WO2016111053A1 (ja) | 2015-01-07 | 2015-09-15 | 超音波プローブ |
| PCT/JP2015/076187 WO2016111054A1 (ja) | 2015-01-07 | 2015-09-15 | 超音波プローブ |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/076186 WO2016111053A1 (ja) | 2015-01-07 | 2015-09-15 | 超音波プローブ |
| PCT/JP2015/076187 WO2016111054A1 (ja) | 2015-01-07 | 2015-09-15 | 超音波プローブ |
Country Status (5)
| Country | Link |
|---|---|
| US (3) | US9839437B2 (ja) |
| EP (3) | EP3243466B1 (ja) |
| JP (3) | JP6001214B1 (ja) |
| CN (3) | CN106456227B (ja) |
| WO (3) | WO2016111055A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018078833A1 (ja) * | 2016-10-28 | 2018-05-03 | オリンパス株式会社 | 超音波プローブ |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016111052A1 (ja) * | 2015-01-07 | 2016-07-14 | オリンパス株式会社 | 超音波プローブ |
| USD831834S1 (en) * | 2015-12-04 | 2018-10-23 | Sonotec Ultraschallsensorik Halle Gmbh | Ultrasonic probe |
| US10631882B2 (en) * | 2016-04-28 | 2020-04-28 | David K. Boger | Oscillating decortication burr assembly |
| WO2018078834A1 (ja) * | 2016-10-28 | 2018-05-03 | オリンパス株式会社 | 超音波プローブ |
| US11786259B1 (en) * | 2019-05-28 | 2023-10-17 | Mirus Llc | Systems and methods for ultrasonically-assisted placement of orthopedic implants |
| USD974558S1 (en) | 2020-12-18 | 2023-01-03 | Stryker European Operations Limited | Ultrasonic knife |
| CN115500902B (zh) * | 2022-10-13 | 2023-09-15 | 以诺康医疗科技(苏州)有限公司 | 一种超声手术刀 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007531563A (ja) * | 2004-02-27 | 2007-11-08 | エシコン・エンド−サージェリィ・インコーポレイテッド | 横および縦振動を有する超音波外科ブレード |
| US20140135804A1 (en) * | 2012-11-15 | 2014-05-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic and electrosurgical devices |
| JP2014533148A (ja) * | 2011-10-19 | 2014-12-11 | ソーリン ゲーエムベーハー | ソノトロード |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6266848A (ja) * | 1985-09-20 | 1987-03-26 | 住友ベークライト株式会社 | 外科手術用具 |
| CA2042006C (en) * | 1990-05-11 | 1995-08-29 | Morito Idemoto | Surgical ultrasonic horn |
| WO1991017716A1 (en) * | 1990-05-17 | 1991-11-28 | Sumitomo Bakelite Company Limited | Surgical instrument |
| JPH07110278B2 (ja) * | 1993-03-29 | 1995-11-29 | 住友ベークライト株式会社 | 超音波手術装置 |
| CA2276316C (en) * | 1998-06-29 | 2008-02-12 | Ethicon Endo-Surgery, Inc. | Method of balancing asymmetric ultrasonic surgical blades |
| JP4253513B2 (ja) * | 2003-02-14 | 2009-04-15 | オリンパス株式会社 | 超音波処置装置 |
| US7532793B2 (en) | 2003-07-29 | 2009-05-12 | Intel Corporation | Segmented waveguide coupler |
| US7785337B2 (en) * | 2003-09-09 | 2010-08-31 | Medtronic Xomed, Inc. | Surgical micro-burring instrument and method of performing sinus surgery |
| JP2005152098A (ja) * | 2003-11-21 | 2005-06-16 | Miwatec:Kk | 超音波ハンドピ−スとこれに使用する超音波ホ−ン |
| ITTO20060113U1 (it) * | 2006-07-27 | 2008-01-28 | Cornelio Blus | Punte taglienti per chirurgia ossea ad ultrasuoni |
| US20080194999A1 (en) * | 2007-02-09 | 2008-08-14 | Norihiro Yamaha | Ultrasonic treatment apparatus and treatment method |
| AU2008310869B2 (en) * | 2007-10-10 | 2014-04-17 | Ethicon Endo-Surgery, Inc | Ultrasonic device for cutting and coagulating |
| GB0809243D0 (en) * | 2008-05-21 | 2008-06-25 | Sra Dev Ltd | Improved torsional mode tissue dissector |
| JP5430161B2 (ja) | 2008-06-19 | 2014-02-26 | オリンパスメディカルシステムズ株式会社 | 超音波手術装置 |
| US20100106173A1 (en) * | 2008-10-23 | 2010-04-29 | Hideto Yoshimine | Ultrasonic surgical device |
| US20110270256A1 (en) * | 2009-09-24 | 2011-11-03 | Medicinelodge, Inc. Dba Imds Co-Innovation | Surgical rasp with radiofrequency ablation |
| US8579928B2 (en) * | 2010-02-11 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Outer sheath and blade arrangements for ultrasonic surgical instruments |
| WO2012054882A1 (en) * | 2010-10-21 | 2012-04-26 | Kci Licensing, Inc. | Debridement hand tool |
| WO2012118018A1 (ja) * | 2011-03-01 | 2012-09-07 | オリンパスメディカルシステムズ株式会社 | 超音波プローブ |
| US9848900B2 (en) * | 2012-12-07 | 2017-12-26 | Ethicon Llc | Ultrasonic surgical blade |
| WO2014196640A1 (ja) * | 2013-06-07 | 2014-12-11 | オリンパスメディカルシステムズ株式会社 | 超音波プローブ及び超音波処置装置 |
| US9949751B2 (en) * | 2014-02-04 | 2018-04-24 | Misonix, Inc. | Ultrasonic debrider probe |
| JP5807080B2 (ja) | 2014-02-14 | 2015-11-10 | 本田技研工業株式会社 | 車両 |
-
2015
- 2015-09-15 CN CN201580027526.1A patent/CN106456227B/zh not_active Expired - Fee Related
- 2015-09-15 WO PCT/JP2015/076188 patent/WO2016111055A1/ja active Application Filing
- 2015-09-15 JP JP2016522082A patent/JP6001214B1/ja not_active Expired - Fee Related
- 2015-09-15 EP EP15876928.1A patent/EP3243466B1/en active Active
- 2015-09-15 JP JP2016522064A patent/JP6001212B1/ja active Active
- 2015-09-15 EP EP15876927.3A patent/EP3243465B1/en active Active
- 2015-09-15 EP EP15876926.5A patent/EP3243464A4/en not_active Withdrawn
- 2015-09-15 WO PCT/JP2015/076186 patent/WO2016111053A1/ja active Application Filing
- 2015-09-15 JP JP2016522079A patent/JP6001213B1/ja active Active
- 2015-09-15 WO PCT/JP2015/076187 patent/WO2016111054A1/ja active Application Filing
- 2015-09-15 CN CN201580027608.6A patent/CN106456228B/zh not_active Expired - Fee Related
- 2015-09-15 CN CN201580027267.2A patent/CN106456226B/zh not_active Expired - Fee Related
-
2016
- 2016-10-20 US US15/298,344 patent/US9839437B2/en active Active
- 2016-10-24 US US15/332,112 patent/US9730709B2/en active Active
- 2016-10-24 US US15/332,550 patent/US9730710B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007531563A (ja) * | 2004-02-27 | 2007-11-08 | エシコン・エンド−サージェリィ・インコーポレイテッド | 横および縦振動を有する超音波外科ブレード |
| JP2014533148A (ja) * | 2011-10-19 | 2014-12-11 | ソーリン ゲーエムベーハー | ソノトロード |
| US20140135804A1 (en) * | 2012-11-15 | 2014-05-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic and electrosurgical devices |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018078833A1 (ja) * | 2016-10-28 | 2018-05-03 | オリンパス株式会社 | 超音波プローブ |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2016111054A1 (ja) | 2017-04-27 |
| US20170035453A1 (en) | 2017-02-09 |
| CN106456226B (zh) | 2019-08-23 |
| EP3243464A1 (en) | 2017-11-15 |
| US9730710B2 (en) | 2017-08-15 |
| EP3243466A1 (en) | 2017-11-15 |
| JPWO2016111055A1 (ja) | 2017-04-27 |
| JP6001213B1 (ja) | 2016-10-05 |
| EP3243464A4 (en) | 2018-09-19 |
| WO2016111053A1 (ja) | 2016-07-14 |
| EP3243465A4 (en) | 2018-07-18 |
| CN106456227A (zh) | 2017-02-22 |
| EP3243466B1 (en) | 2019-11-06 |
| CN106456226A (zh) | 2017-02-22 |
| US20170035441A1 (en) | 2017-02-09 |
| EP3243465A1 (en) | 2017-11-15 |
| EP3243466A4 (en) | 2018-07-11 |
| US9839437B2 (en) | 2017-12-12 |
| US20170035454A1 (en) | 2017-02-09 |
| WO2016111054A1 (ja) | 2016-07-14 |
| US9730709B2 (en) | 2017-08-15 |
| EP3243465B1 (en) | 2019-11-06 |
| JP6001214B1 (ja) | 2016-10-05 |
| CN106456228A (zh) | 2017-02-22 |
| JP6001212B1 (ja) | 2016-10-05 |
| CN106456228B (zh) | 2019-05-31 |
| CN106456227B (zh) | 2019-07-19 |
| JPWO2016111053A1 (ja) | 2017-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6001214B1 (ja) | 超音波プローブ | |
| JP6165389B2 (ja) | 超音波プローブ | |
| EP2859858B1 (en) | Ultrasound probe | |
| JP5959790B1 (ja) | 超音波プローブ | |
| JP5959781B2 (ja) | 超音波プローブ及び超音波処置具 | |
| JP5690452B2 (ja) | 超音波伝達ユニット及び超音波処置装置 | |
| EP2893892B1 (en) | Ultrasonic transmitting unit and ultrasonic treatment | |
| JP6033519B1 (ja) | 超音波プローブと超音波処置具 | |
| JP5970142B2 (ja) | 超音波プローブ及び超音波処置具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2016522082 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15876928 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015876928 Country of ref document: EP |