WO2015141796A1 - 電動機、電動パワーステアリング装置および車両 - Google Patents
電動機、電動パワーステアリング装置および車両 Download PDFInfo
- Publication number
- WO2015141796A1 WO2015141796A1 PCT/JP2015/058330 JP2015058330W WO2015141796A1 WO 2015141796 A1 WO2015141796 A1 WO 2015141796A1 JP 2015058330 W JP2015058330 W JP 2015058330W WO 2015141796 A1 WO2015141796 A1 WO 2015141796A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- phase
- coil
- teeth
- coils
- circumferential direction
- Prior art date
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/02—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/08—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque
- B62D6/10—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque characterised by means for sensing or determining torque
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/225—Detecting coils
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/24—Devices for sensing torque, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/28—Layout of windings or of connections between windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
- H02K7/1163—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion
- H02K7/1166—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion comprising worm and worm-wheel
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/10—Arrangements for controlling torque ripple, e.g. providing reduced torque ripple
Definitions
- the present invention relates to an electric motor, an electric power steering device, and a vehicle.
- Patent Document 1 describes a motor for a steering device in which a plurality of magnetic pole bodies constituting a stator are divided into two groups, a system A group and a system B group.
- a system A includes a system A-1 including a plurality of magnetic pole bodies arranged continuously, and a system including a plurality of magnetic pole bodies arranged in a diametrically opposed manner to the magnetic pole bodies belonging to the system A-1.
- A-2 The same applies to the system B.
- the present invention has been made in view of the above, and an electric motor and an electric power steering device that can suppress an increase in torque ripple even when driven by only one of two coil systems excited independently of each other. And to provide a vehicle.
- an electric motor includes an annular back yoke, and an annular stator core including a plurality of teeth arranged in a circumferential direction on the inner peripheral surface of the back yoke; , Where n is a natural number, a plurality of magnets excited by a first inverter that generates a three-phase alternating current including a first U phase, a first V phase, and a first W phase by being concentratedly wound around each of the plurality of adjacent teeth.
- a first coil group arranged at equal intervals in the circumferential direction of the stator core and adjacent to the teeth around which the first coil is concentratedly wound.
- the above configuration makes the circumferential distance between the first coil groups smaller than when two first coil groups are arranged at equal intervals in the circumferential direction. For this reason, even when the current is not supplied to the second coil, the variation in the circumferential direction at the position where the first coil generates torque is reduced. Therefore, the electric motor according to the present invention can suppress an increase in torque ripple even when driven by only one of the two coil systems excited independently of each other.
- the plurality of first coils include a plurality of first U-phase coils excited by the first U-phase current, and a plurality of first V-phase coils excited by the first V-phase current.
- the second VW coil group including
- the two first coils excited by the in-phase current do not belong to one first coil group, and the two second coils excited by the in-phase current belong to one second coil group. None will happen. For this reason, the generation position of torque is easily dispersed in the circumferential direction. Therefore, the electric motor can suppress torque ripple more.
- the first UV coil group includes a set of two first U-phase coils that are adjacent to each other in the circumferential direction of the stator core, and the winding directions around the teeth.
- the first VW coil group is composed of two sets of two first V-phase coils that are opposite to each other and are adjacent to each other in the circumferential direction of the stator core. A pair of two first V-phase coils adjacent to each other in the circumferential direction of the stator core, and two first W-phase coils adjacent to each other in the circumferential direction of the stator core, the winding directions of the teeth being opposite to each other.
- the first UW coil group is wound around the teeth.
- a pair of two first U-phase coils whose directions are opposite to each other and adjacent to each other in the circumferential direction of the stator core, and two winding directions around the teeth are opposite to each other and 2 adjacent to each other in the circumferential direction of the stator core.
- the second UV coil group consists of two second U-phase coils adjacent to each other in the circumferential direction of the stator core, the winding directions of the second UV coil group being opposite to each other. And two sets of two V-phase coils adjacent to each other in the circumferential direction of the stator core, and the second VW coil group includes the teeth.
- the motor has a larger number of magnetic poles, so that the torque generation positions are more easily dispersed in the circumferential direction. For this reason, the electric motor can suppress torque ripple more.
- the winding direction of the second coil around the teeth is preferably opposite to the winding direction of the first coil around the teeth.
- the winding start position with respect to the tooth is different between the first coil and the second coil.
- the first coil is started to be wound from the radially outer end portion of the teeth
- the second coil is started to be wound from the radially inner end portion of the teeth.
- the end on the side connected to the first inverter among the plurality of wirings is positioned closer to the outside in the radial direction of the motor, and the end on the side connected to the second inverter among the plurality of wirings is the diameter of the motor. Located inward of the direction. Therefore, the position of the wiring connected to the electric motor tends to vary. Therefore, the electric motor can reduce the possibility that a plurality of wires interfere with each other.
- n is preferably an odd number.
- an electric power steering device that obtains an auxiliary steering torque by the above-described electric motor is preferable.
- the electric power steering apparatus suppresses the possibility of causing the operator to feel vibration due to torque ripple and causing discomfort.
- the electric power steering device can operate the vehicle in a state in which the driver's discomfort is suppressed. As a result, the electric power steering apparatus can give a comfortable steering feeling to the operator.
- the vehicle is equipped with the above-described electric power steering device.
- an electric motor an electric power steering device, and a vehicle that can suppress an increase in torque ripple even when driven by only one of the two coil systems excited independently of each other.
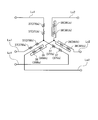
- FIG. 1 is a configuration diagram of an electric power steering apparatus including the electric motor according to the first embodiment.
- FIG. 2 is a front view for explaining an example of a speed reducer included in the electric power steering apparatus according to the first embodiment.
- FIG. 3 is a cross-sectional view schematically showing the configuration of the electric motor of the first embodiment on a virtual plane including the central axis.
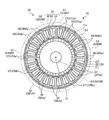
- FIG. 4 is a cross-sectional view schematically illustrating the configuration of the electric motor according to the first embodiment by cutting along a virtual plane orthogonal to the central axis.
- FIG. 5 is a schematic diagram for explaining the driving of the electric motor by the ECU.
- FIG. 6 is a schematic diagram showing the wiring of the first coil and the wiring of the second coil.
- FIG. 7 is a schematic diagram illustrating the wiring of the first coil and the wiring of the second coil according to the first modification.
- FIG. 8 is a cross-sectional view schematically illustrating the configuration of the electric motor according to Modification 2 cut along a virtual plane orthogonal to the central axis.
- FIG. 9 is a cross-sectional view schematically showing the configuration of the electric motor according to Modification 3 cut along a virtual plane orthogonal to the central axis.
- FIG. 10 is an explanatory diagram illustrating current waveforms of the first U phase and the second U phase supplied to the electric motor according to the second embodiment.
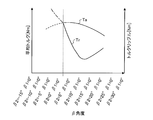
- FIG. 11 is an explanatory diagram for explaining the amount of change in the average torque and the magnitude of the torque ripple with respect to the phase difference between the phase of the first motor drive current and the second motor drive current.
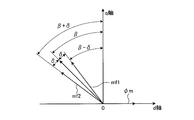
- FIG. 12 is a diagram showing a vector relationship between the armature magnetic flux of the first coil group and the armature magnetic flux of the second coil group on the dq axis.
- FIG. 13 is a schematic diagram of a vehicle equipped with an electric power steering apparatus including the electric motor according to the first embodiment or the second embodiment.
- FIG. 1 is a configuration diagram of an electric power steering apparatus including the electric motor according to the first embodiment.
- Embodiment 1 demonstrates the outline
- the electric power steering device 80 includes a steering wheel 81, a steering shaft 82, a steering force assist mechanism 83, a universal joint 84, a lower shaft 85, a universal joint 86, in the order in which the force applied from the steering wheel is transmitted.
- a pinion shaft 87, a steering gear 88, and a tie rod 89 are provided.
- the electric power steering apparatus 80 includes an ECU (Electronic Control Unit) 90, a torque sensor 91a, and a vehicle speed sensor 91b.
- ECU Electronic Control Unit
- the steering shaft 82 includes an input shaft 82a and an output shaft 82b.
- the input shaft 82a has one end connected to the steering wheel 81 and the other end connected to the steering force assist mechanism 83 via the torque sensor 91a.
- the output shaft 82 b has one end connected to the steering force assist mechanism 83 and the other end connected to the universal joint 84.
- the input shaft 82a and the output shaft 82b are made of a magnetic material such as iron.
- the lower shaft 85 has one end connected to the universal joint 84 and the other end connected to the universal joint 86.
- the pinion shaft 87 has one end connected to the universal joint 86 and the other end connected to the steering gear 88.
- the steering gear 88 includes a pinion 88a and a rack 88b.
- the pinion 88a is connected to the pinion shaft 87.
- the rack 88b meshes with the pinion 88a.
- the steering gear 88 is configured as a rack and pinion type.
- the steering gear 88 converts the rotational motion transmitted to the pinion 88a into a linear motion by the rack 88b.
- the tie rod 89 is connected to the rack 88b.
- the steering force assist mechanism 83 includes a speed reducer 92 and the electric motor 10.
- the reduction gear 92 is connected to the output shaft 82b.
- the electric motor 10 is an electric motor that is connected to the reduction gear 92 and generates auxiliary steering torque.
- a steering column is constituted by the steering shaft 82, the torque sensor 91a, and the speed reducer 92.
- the electric motor 10 gives auxiliary steering torque to the output shaft 82b of the steering column. That is, the electric power steering apparatus 80 of the first embodiment is a column assist system.
- the column assist type electric power steering device 80 has a relatively short distance between the operator and the electric motor 10, and the torque change or frictional force of the electric motor 10 may affect the steering person. For this reason, the electric power steering apparatus 80 is required to reduce the frictional force of the electric motor 10.
- FIG. 2 is a front view for explaining an example of a reduction gear provided in the electric power steering apparatus of the first embodiment.
- FIG. 2 shows a part in cross section.
- the speed reducer 92 is a worm speed reducer.
- the reduction gear 92 includes a reduction gear housing 93, a worm 94, a ball bearing 95 a, a ball bearing 95 b, a worm wheel 96, and a holder 97.
- the worm 94 is coupled to the shaft 21 of the electric motor 10 by a spline or an elastic coupling.
- the worm 94 is held in the speed reducer housing 93 so as to be rotatable by a ball bearing 95 a and a ball bearing 95 b held by the holder 97.
- the worm wheel 96 is rotatably held by the speed reducer housing 93.
- the worm teeth 94 a formed on a part of the worm 94 mesh with the worm wheel teeth 96 a formed on the worm wheel 96.
- Rotational force of the electric motor 10 is transmitted to the worm wheel 96 through the worm 94 to rotate the worm wheel 96.
- the reduction gear 92 increases the torque of the electric motor 10 by the worm 94 and the worm wheel 96. Then, the reduction gear 92 gives an auxiliary steering torque to the output shaft 82b of the steering column shown in FIG.
- the torque sensor 91a shown in FIG. 1 detects the driver's steering force transmitted to the input shaft 82a through the steering wheel 81 as a steering torque.
- the vehicle speed sensor 91b detects the traveling speed of the vehicle on which the electric power steering device 80 is mounted. In the ECU 90, the electric motor 10, the torque sensor 91a, and the vehicle speed sensor 91b are electrically connected.
- the ECU 90 controls the operation of the electric motor 10. Moreover, ECU90 acquires a signal from each of the torque sensor 91a and the vehicle speed sensor 91b. That is, the ECU 90 acquires the steering torque T from the torque sensor 91a, and acquires the traveling speed V of the vehicle from the vehicle speed sensor 91b.
- the ECU 90 is supplied with electric power from a power supply device (for example, a vehicle-mounted battery) 99 with the ignition switch 98 turned on.
- the ECU 90 calculates an assist steering command value of the assist command based on the steering torque T and the traveling speed V. Then, the ECU 90 adjusts the electric power value X supplied to the electric motor 10 based on the calculated auxiliary steering command value.
- the ECU 90 acquires the information on the induced voltage from the electric motor 10 or the information on the rotation of the rotor from the resolver described later as the operation information Y.
- the steering force of the driver (driver) input to the steering wheel 81 is transmitted to the speed reduction device 92 of the steering force assist mechanism 83 via the input shaft 82a.
- the ECU 90 acquires the steering torque T input to the input shaft 82a from the torque sensor 91a, and acquires the traveling speed V from the vehicle speed sensor 91b.
- the ECU 90 controls the operation of the electric motor 10.
- the auxiliary steering torque created by the electric motor 10 is transmitted to the speed reducer 92.
- the steering torque T (including auxiliary steering torque) output via the output shaft 82 b is transmitted to the lower shaft 85 via the universal joint 84 and further transmitted to the pinion shaft 87 via the universal joint 86.
- the steering force transmitted to the pinion shaft 87 is transmitted to the tie rod 89 via the steering gear 88 to steer the steered wheels.
- the electric motor 10 will be described.
- FIG. 3 is a cross-sectional view schematically showing the configuration of the electric motor of the first embodiment on a virtual plane including the central axis.
- FIG. 4 is a cross-sectional view schematically illustrating the configuration of the electric motor according to the first embodiment by cutting along a virtual plane orthogonal to the central axis.
- the electric motor 10 includes a housing 11, a bearing 12, a bearing 13, a resolver 14, a motor rotor 20, and a motor stator 30 for a brushless motor.
- the housing 11 includes a cylindrical housing 11a and a front bracket 11b.
- the front bracket 11b is formed in a substantially disc shape and is attached to the cylindrical housing 11a so as to close one open end of the cylindrical housing 11a.
- the cylindrical housing 11a is formed with a bottom 11c at the end opposite to the front bracket 11b so as to close the end.
- the bottom part 11c is formed integrally with the cylindrical housing 11a, for example.
- a material for forming the cylindrical housing 11a for example, a general steel material such as SPCC (Steel Plate Cold Commercial), electromagnetic soft iron, aluminum, or the like can be applied.
- the front bracket 11b plays a role of a flange when the electric motor 10 is attached to a desired device.
- the bearing 12 is provided on the inner side of the cylindrical housing 11a and substantially at the center of the front bracket 11b.
- the bearing 13 is provided inside the cylindrical housing 11a and at a substantially central portion of the bottom portion 11c.
- the bearing 12 rotatably supports one end of a shaft 21 that is a part of the motor rotor 20 disposed inside the cylindrical housing 11a.
- the bearing 13 rotatably supports the other end of the shaft 21. Thereby, the shaft 21 rotates around the axis of the rotation center Zr.
- the resolver 14 is supported by a terminal block 15 provided on the front bracket 11b side of the shaft 21.
- the resolver 14 detects the rotational position of the motor rotor 20 (shaft 21).
- the resolver 14 includes a resolver rotor 14a and a resolver stator 14b.
- the resolver rotor 14a is attached to the circumferential surface of the shaft 21 by press fitting or the like.
- the resolver stator 14b is disposed to face the resolver rotor 14a with a predetermined gap.
- the motor rotor 20 is provided inside the cylindrical housing 11a so that it can rotate around the rotation center Zr with respect to the cylindrical housing 11a.
- the motor rotor 20 includes a shaft 21, a rotor yoke 22, and a magnet 23.
- the shaft 21 is formed in a cylindrical shape.
- the rotor yoke 22 is formed in a cylindrical shape.
- the rotor yoke 22 has an arcuate outer periphery. With this configuration, the rotor yoke 22 can reduce the number of stamping processes compared to a case where the outer periphery has a complicated shape.
- the rotor yoke 22 is manufactured by laminating thin plates such as electromagnetic steel plates and cold rolled steel plates by means of adhesion, boss, caulking or the like.
- the rotor yoke 22 is sequentially stacked in the mold and discharged from the mold.
- the rotor yoke 22 is fixed to the shaft 21 by press-fitting the shaft 21 into, for example, a hollow portion thereof.
- the shaft 21 and the rotor yoke 22 may be integrally formed.
- the magnet 23 is fixed to the surface along the circumferential direction of the rotor yoke 22, and a plurality of magnets 23 are provided.
- the magnet 23 is a permanent magnet, and the S pole and the N pole are alternately arranged at equal intervals in the circumferential direction of the rotor yoke 22. Accordingly, the number of poles of the motor rotor 20 shown in FIG. 4 is eight poles in which the N poles and the S poles are alternately arranged in the circumferential direction of the rotor yoke 22.
- the motor stator 30 is provided in a cylindrical shape so as to surround the motor rotor 20 inside the cylindrical housing 11a.
- the motor stator 30 is attached by being fitted, for example, to the inner peripheral surface 11d of the cylindrical housing 11a.
- the central axis of the motor stator 30 coincides with the rotation center Zr of the motor rotor 20.
- the motor stator 30 includes a cylindrical stator core 31, a plurality of first coils 37, and a plurality of second coils 38.
- the stator core 31 includes an annular back yoke 33 and a plurality of teeth 34 arranged in the circumferential direction around the rotation center Zr on the inner peripheral surface of the back yoke 33.
- the circumferential direction around the rotation center Zr (the circumferential direction of the stator core 31) is simply referred to as the circumferential direction.
- the stator core 31 is made of a magnetic material such as an electromagnetic steel plate.
- the stator core 31 is formed by stacking and bundling a plurality of core pieces formed in substantially the same shape in the axial direction parallel to the axis of the rotation center Zr.
- the back yoke 33 is a cylindrical member, for example.
- the teeth 34 protrude from the inner peripheral surface of the back yoke 33.
- 12 teeth 34 are arranged in the circumferential direction.
- the tooth 34 includes a tooth tip 32 at the end opposite to the back yoke 33.
- the teeth tip 32 protrudes from the teeth 34 in the circumferential direction.
- the teeth 34 face the outer peripheral surface of the rotor yoke 22.
- the stator core 31 is annularly arranged at a predetermined interval on the radially outer side of the rotor yoke 22.
- stator core 31 When the stator core 31 is press-fitted into the cylindrical housing 11a, the motor stator 30 is provided inside the cylindrical housing 11a in an annular state.
- the stator core 31 and the cylindrical housing 11a may be fixed by adhesion, shrink fitting, welding or the like in addition to press-fitting.
- the first coil 37 is concentratedly wound around each of the plurality of teeth 34.
- the first coil 37 is concentratedly wound around the outer periphery of the tooth 34 via an insulator 37a (see FIG. 3).
- the insulator 37a is a member for insulating the first coil 37 and the stator core 31, and is formed of a heat resistant member. All the first coils 37 are included in a first coil system that is a system excited by the same inverter (a first inverter 52 described later).
- the first coil system includes, for example, six first coils 37.
- the six first coils 37 are arranged such that the two first coils 37 are adjacent to each other in the circumferential direction.
- first coil groups G1 having the adjacent first coils 37 as one group are arranged at equal intervals in the circumferential direction. That is, the first coil system includes three first coil groups G1 arranged at equal intervals in the circumferential direction. Note that the number of the first coil groups G1 is not necessarily three, and it is sufficient if 3n are arranged at equal intervals in the circumferential direction when n is a natural number. Further, n is desirably an odd number.
- the second coil 38 is concentratedly wound around each of the plurality of teeth 34.
- the second coil 38 is concentrated and wound around the outer periphery of the tooth 34 via an insulator.
- the teeth 34 around which the second coil 38 is concentrated are different from the teeth 34 around which the first coil 37 is concentrated.
- All the second coils 38 are included in a second coil system that is a system excited by the same inverter (a second inverter 54 described later).
- the second coil system includes, for example, six second coils 38.
- the six second coils 38 are arranged such that the two second coils 38 are adjacent to each other in the circumferential direction.
- Three second coil groups G2 having the adjacent second coils 38 as one group are arranged at equal intervals in the circumferential direction.
- the second coil system includes three second coil groups G2 arranged at equal intervals in the circumferential direction.
- the number of the second coil groups G2 is not necessarily three, and it is sufficient if 3n are arranged at equal intervals in the circumferential direction when n is a natural number. Further, n is desirably an odd number.
- FIG. 5 is a schematic diagram for explaining the driving of the electric motor by the ECU.
- the electric motor control device 100 includes an ECU 90 and an electric motor 10.
- the motor control device 100 can input an input signal to the ECU 90 from a sensor such as a torque sensor 91a, for example.
- the ECU 90 controls the operation of the electric motor 10 by three-phase alternating current.
- the ECU 90 includes a control device 40 that controls the electric motor 10 and a motor drive circuit 50.
- the control device 40 outputs a current value for rotationally driving the motor rotor 20 as a command value.
- the motor drive circuit 50 generates a pulse width modulation signal having a predetermined duty ratio called PWM (Pulse Width Modulation) based on the command value of the control device 40, and outputs a three-phase AC signal for controlling the current value of the motor 10.
- PWM Pulse Width Modulation
- the motor drive circuit 50 only needs to be electrically connected to the control device 40. In order to suppress the influence of heat generation of the motor drive circuit 50, the motor drive circuit 50 is installed at a location different from the location where the control device 40 is installed. Yes.
- the control device 40 includes a main control unit 41, a first coil system control unit 42, and a second coil system control unit 44 as functional blocks, a control unit 40A, a first phase adjustment unit 43, and a second phase.
- An adjustment unit 45 and a phase difference adjustment unit 40B including the adjustment unit 45 are provided.
- the motor drive circuit 50 includes a first motor drive circuit 50A for supplying a first motor drive current of three-phase AC to the first coil group G1 based on the command value, and a second motor drive current of three-phase AC for the second coil. And a second motor drive circuit 50B that supplies the group G2.
- First motor drive circuit 50 ⁇ / b> A includes a first gate drive circuit 51 and a first inverter 52.
- the second motor drive circuit 50B includes a second gate drive circuit 53 and a second inverter 54.
- the main control unit 41 acquires the steering torque T input to the input shaft 82a from the torque sensor 91a.
- the main control unit 41 calculates a current value for rotationally driving the motor rotor 20 as a command value according to the information acquired from the torque sensor 91a.
- the first coil system control unit 42 calculates a first pulse width modulation signal having a predetermined duty ratio based on the command value of the main control unit 41.
- the first coil system control unit 42 sends information on the first pulse width adjustment signal to the first phase adjustment unit 43.
- the second coil system control unit 44 calculates a second pulse width modulation signal having a predetermined duty ratio based on the command value of the main control unit 41.
- the second coil system control unit 44 sends information on the second pulse width adjustment signal to the second phase adjustment unit 45.
- the first phase adjustment unit 43 and the second phase adjustment unit 45 are configured such that the phase of the current supplied to the first coil group G1 is the same as the phase of the current supplied to the second coil group G2. Adjust. At the time when the first coil system control unit 42 and the second coil system control unit 44 output, there is no phase difference between the information of the first pulse width modulation signal and the information of the second pulse width modulation signal, and the information is synchronized. In this case, the phase difference adjustment unit 40B may not be provided.
- the first phase adjustment unit 43 sends the information of the adjusted first pulse width adjustment signal to the first gate drive circuit 51.
- the second phase adjustment unit 45 sends the information of the adjusted second pulse width adjustment signal to the second gate drive circuit 53.
- the first gate drive circuit 51 controls the first inverter 52 based on the information of the first pulse width adjustment signal acquired from the first phase adjustment unit 43.
- the first inverter 52 switches the field effect transistor so as to obtain a three-phase current value according to the duty ratio of the first pulse width modulation signal in the first gate drive circuit 51, thereby providing a first U phase and a first V phase. And a three-phase alternating current including the first W phase.
- the three-phase alternating current generated by the first inverter 52 is sent to the electric motor 10 through three wirings Lu1, Lv1, and Lw1, and excites the plurality of first coils 37.
- the wiring Lu ⁇ b> 1 sends a first U-phase current to the electric motor 10.
- the wiring Lv1 sends a first V-phase current to the electric motor 10.
- the wiring Lw1 sends a first W-phase current to the electric motor 10.
- the second gate drive circuit 53 controls the second inverter 54 based on the information of the second pulse width adjustment signal acquired from the second phase adjustment unit 45.
- the second inverter 54 switches the field effect transistor so as to obtain a three-phase current value according to the duty ratio of the second pulse width modulation signal in the second gate drive circuit 53, so that the second U phase and the second V phase are switched. And a three-phase alternating current including the second W phase.
- the three-phase alternating current generated by the second inverter 54 is sent to the electric motor 10 by the three wires Lu2, Lv2, and Lw2, and excites the plurality of second coils 38.
- the wiring Lu ⁇ b> 2 sends the second U-phase current to the electric motor 10.
- the wiring Lv2 sends a second V-phase current to the electric motor 10.
- the wiring Lw2 sends a second W-phase current to the electric motor 10.
- control device 40 controls the first pulse width adjustment of the predetermined duty ratio to be the current value for driving the motor rotor 20 to the desired rotational drive with respect to the first gate drive circuit 51 and the second gate drive circuit 53.
- the change signal and the second pulse width adjustment signal can be supplied to control the first motor drive circuit 50A and the second motor drive circuit 50B.
- FIG. 6 is a schematic diagram showing the wiring of the first coil and the wiring of the second coil.
- the six first coils 37 include two first U-phase coils 37Ua and 37Ub excited by a first U-phase current, and two first V-phase coils excited by a first V-phase current. 37Va, 37Vb, and two first W-phase coils 37Wa, 37Wb excited by a first W-phase current.
- First U-phase coil 37Ub is connected in series to first U-phase coil 37Ua.
- First V-phase coil 37Vb is connected in series to first V-phase coil 37Va.
- First W-phase coil 37Wb is connected in series to first W-phase coil 37Wa.
- the winding direction of the first coil 37 around the teeth 34 is the same direction. Further, the wirings Lu1, Lv1, and Lw1 are joined by Y connection.
- the six second coils 38 include two second U-phase coils 38Ua and 38Ub excited by a second U-phase current, and two second V-phase coils excited by a second V-phase current. 38Va, 38Vb and two second W-phase coils 38Wa, 38Wb excited by a second W-phase current.
- Second U-phase coil 38Ub is connected in series to second U-phase coil 38Ua.
- Second V-phase coil 38Vb is connected in series to second V-phase coil 38Va.
- Second W-phase coil 38Wb is connected in series to second W-phase coil 38Wa.
- the winding direction of the second coil 38 around the teeth 34 is all the same direction, and is the same as the winding direction of the first coil 37. Further, the wirings Lu2, Lv2, and Lw2 are joined by Y connection.
- the electric motor according to the first embodiment exemplifies six first coils 37 and second coils 38 that are Y-connected, but includes six first coils 37 and second coils 38 that are ⁇ -connected. There may be.
- the three first coil groups G1 include a first UV coil group G1UV, a first VW coil group G1VW, and a first UW coil group G1UW.
- the first UV coil group G1UV includes a first U-phase coil 37Ub and a first V-phase coil 37Va that are adjacent to each other in the circumferential direction.
- First VW coil group G1VW includes a first V-phase coil 37Vb and a first W-phase coil 37Wa that are adjacent to each other in the circumferential direction.
- the first UW coil group G1UW includes a first U-phase coil 37Ua and a first W-phase coil 37Wb that are adjacent to each other in the circumferential direction.
- the three second coil groups G2 include a second UV coil group G2UV, a second VW coil group G2VW, and a second UW coil group G2UW.
- the second UV coil group G2UV includes a second U-phase coil 38Ub and a second V-phase coil 38Va that are adjacent to each other in the circumferential direction.
- Second VW coil group G2VW includes second V-phase coil 38Vb and second W-phase coil 38Wa that are adjacent to each other in the circumferential direction.
- Second UW coil group G2UW includes a second U-phase coil 38Ua and a second W-phase coil 38Wb that are adjacent to each other in the circumferential direction.
- the first coil 37 excited by the first U-phase current is opposed to the second coil 38 excited by the second U-phase current in the radial direction of the stator core 31.
- the radial direction of the stator core 31 is simply referred to as the radial direction.
- the first U-phase coil 37Ua faces the second U-phase coil 38Ua
- the first U-phase coil 37Ub faces the second U-phase coil 38Ub.
- the first coil 37 excited by the first V-phase current is opposed to the second coil 38 excited by the second V-phase current in the radial direction.
- the first V-phase coil 37Va faces the second V-phase coil 38Va
- the first V-phase coil 37Vb faces the second V-phase coil 38Vb.
- the first coil 37 excited by the first W-phase current is opposed to the second coil 38 excited by the second W-phase current in the radial direction.
- the first W-phase coil 37Wa faces the second W-phase coil 38Wa
- the first W-phase coil 37Wb faces the second W-phase coil 38Wb.
- the plurality of first coils 37 are excited by the first inverter 52, and the plurality of second coils 38 are excited by the second inverter 54.
- the first inverter 52 and the second inverter 54 independently supply the three-phase alternating current to the electric motor 10, even if no current is supplied to the second coil 38, the first coil 37. Can drive the electric motor 10. Even if the current is no longer supplied to the first coil 37, the second coil 38 can drive the electric motor 10.
- the case where the current is no longer supplied to the second coil 38 will be described as an example, and the case where the current is no longer supplied to the first coil 37 will be the same and will be omitted.
- first coil groups G1 including a plurality of first coils 37 are arranged at equal intervals in the circumferential direction.
- the distance in the circumferential direction between the first coil groups G1 is reduced. For this reason, even when the current is no longer supplied to the second coil 38, the variation in the circumferential direction at the position where the first coil 37 generates torque is reduced. Therefore, the electric motor 10 can suppress an increase in torque ripple even when driven by only one of the two coil systems excited independently of each other.
- the three first coil groups G1 are composed of a first UV coil group G1UV, a first VW coil group G1VW, and a first UW coil group G1UW.
- the second coil group G2 includes a second UV coil group G2UV, a second VW coil group G2VW, and a second UW coil group G2UW.
- the two first coils 37 excited by the current of the same phase are either the two first U-phase coils 37Ua and 37Ub, the two first V-phase coils 37Va and 37Vb, or the two first W-phase coils 37Wa and 37Wb. Means. For this reason, the generation position of torque is easily dispersed in the circumferential direction. Therefore, the electric motor 10 can suppress torque ripple more.
- the first U-phase coils 37Ua and 37Ub, the first V-phase coils 37Va and 37Vb, or the first W-phase coil are disposed at the circumferential ends of the first coil group G1.
- 37Wa and 37Wa are arranged.
- Second U-phase coils 38Ua and 38Ub, second V-phase coils 38Va and 38Vb, or second W-phase coils 38Wa and 38Wb are arranged at the end in the circumferential direction of the second coil group G2.
- the electric power steering apparatus 80 according to the first embodiment has been described by taking the column assist method as an example, but can also be applied to a pinion assist method and a rack assist method.
- the electric motor 10 includes the annular stator core 31 including the annular back yoke 33 and the plurality of teeth 34 arranged in the circumferential direction on the inner peripheral surface of the back yoke 33.
- the electric motor 10 is a three-phase circuit including a first U phase, a first V phase, and a first W phase that are concentratedly wound around each of a plurality of (two in the first embodiment) adjacent teeth 34 when n is a natural number.
- a group consisting of a plurality (two in the first embodiment) of the first coils 37 excited by the first inverter 52 that generates alternating current, and 3n (in the first embodiment) at equal intervals in the circumferential direction of the stator core 31. are provided with a first coil group G1.
- the electric motor 10 is concentratedly wound around each of a plurality of (two in the first embodiment) teeth 34 arranged adjacent to each other at positions different from the teeth 34 around which the first coil 37 is concentratedly wound.
- the second coil group G2 is provided with 3n (three in the first embodiment) arranged at intervals.
- the electric motor 10 can suppress an increase in torque ripple even when driven by only one of the two coil systems excited independently of each other.
- the plurality (six in the first embodiment) of the first coils 37 are a plurality of (two in the first embodiment) first U-phase coils 37Ua and 37Ub that are excited by the first U-phase current, and the first V A plurality of (two in the first embodiment) first V-phase coils 37Va and 37Vb excited by a phase current and a plurality (two in the first embodiment) first W-phase excited by a first W-phase current Coils 37Wa and 37Wb.
- a plurality (six in the first embodiment) of the second coils 38 are excited by a second U-phase current (two in the first embodiment), the second U-phase coils 38Ua and 38Ub, and a second V-phase coil.
- first coil groups G1 include a first UV coil group G1UV including a first U-phase coil 37Ub and a first V-phase coil 37Va, a first V-phase coil 37Vb, and a first W-phase coil 37Wa.
- second coil groups G2 include a second UV coil group G2UV including a second U-phase coil 38Ub and a second V-phase coil 38Va, a second V-phase coil 38Vb, and a second W-phase coil 38Wa. And a second UW coil group G2UW including a second U-phase coil 38Ua and a second W-phase coil 38Wb.
- the two first coils 37 excited by the in-phase current do not belong to one first coil group G1, and the two second coils 38 excited by the in-phase current become one second coil group. No longer belongs to G2. For this reason, the generation position of torque is easily dispersed in the circumferential direction. Therefore, the electric motor 10 can suppress torque ripple more.
- FIG. 7 is a schematic diagram illustrating the wiring of the first coil and the wiring of the second coil according to the first modification.
- the same components as those described in the first embodiment are denoted by the same reference numerals, and redundant description is omitted.
- the winding direction of the second coil 38 around the teeth 34 is opposite to the winding direction of the first coil 37 around the teeth 34.
- the first phase adjustment unit 43 and the second phase adjustment unit 45 include the phase of the current supplied to the first coil group G1 and the phase of the current supplied to the second coil group G2. Are adjusted 180 degrees different from each other. Thereby, the direction of the magnetic field generated by each first coil 37 and each second coil 38 is the same as in the first embodiment.
- the first coil 37 and the second coil 38 have different winding start positions with respect to the tooth 34. For example, when the first coil 37 starts to be wound from the radially outer end portion of the tooth 34, the second coil 38 starts to be wound from the radially inner end portion of the tooth 34. Therefore, as shown in FIG.
- the end of the wirings Lu1, Lv1, and Lw1 on the side connected to the first inverter 52 is located on the outer side in the radial direction of the electric motor 10, and the wirings Lu2, Lv2, and Lw2
- the end on the side connected to the second inverter 54 is located closer to the radially inner side of the electric motor 10. Therefore, the position of the wiring connected to the electric motor 10 is likely to vary. Therefore, the electric motor 10 according to Modification 1 can reduce the possibility that a plurality of wires interfere with each other.
- phase of the current supplied to the first coil group G1 and the phase of the current supplied to the second coil group G2 are different from each other by 180 °, so that the wirings Lu1, Lv1, The radiation noise from Lw1 and the radiation noise from the wirings Lu2, Lv2, and Lw2 from the second inverter 54 to the electric motor 10 cancel each other. For this reason, the radiation noise in the wiring from ECU90 to the electric motor 10 is reduced.
- FIG. 8 is a cross-sectional view schematically illustrating the configuration of the electric motor according to Modification 2 cut along a virtual plane orthogonal to the central axis.
- the number of poles of the motor rotor 20 in Modification 2 is 20 poles in which N poles and S poles are alternately arranged in the circumferential direction of the rotor yoke 22.
- the teeth 34 are arranged 24 in the circumferential direction.
- first coils 37 are arranged.
- the twelve first coils 37 are arranged so that the four first coils 37 are adjacently arranged in the circumferential direction.
- Three first coil groups G1 having four first coils 37 arranged adjacent to each other as one group are arranged at equal intervals in the circumferential direction.
- the three first coil groups G1 include a first UV coil group G1UV, a first VW coil group G1VW, and a first UW coil group G1UW.
- the winding direction with respect to the teeth 34 is opposite to each other and the pair of two first U-phase coils 37Ub adjacent to each other in the circumferential direction and the winding direction with respect to the teeth 34 are opposite to each other in the circumferential direction. And two sets of two first V-phase coils 37Va adjacent to each other.
- the winding direction with respect to the teeth 34 is opposite to each other and the pair of two first V-phase coils 37Vb adjacent to each other in the circumferential direction and the winding direction with respect to the teeth 34 are opposite to each other in the circumferential direction.
- the first UW coil group G1UW includes a pair of two first U-phase coils 37Ua that are adjacent to each other in the circumferential direction and the winding direction with respect to the tooth 34 is opposite to each other in the circumferential direction, and the winding direction with respect to the tooth 34 is opposite to each other in the circumferential direction. And two sets of two first W-phase coils 37Wb adjacent to each other.
- the phase coils 37Wb are each connected in series. Further, one set of first U-phase coil 37Ub is connected in series to one set of first U-phase coil 37Ua. One set of first V-phase coil 37Vb is connected in series to one set of first V-phase coil 37Va. One set of first W-phase coil 37Wb is connected in series to one set of first W-phase coil 37Wa.
- 12 second coils 38 are arranged.
- the twelve second coils 38 are arranged so that the four second coils 38 are arranged adjacent to each other in the circumferential direction.
- Three second coil groups G2 having four second coils 38 arranged adjacent to each other as one group are arranged at equal intervals in the circumferential direction.
- the three second coil groups G2 include a second UV coil group G2UV, a second VW coil group G2VW, and a second UW coil group G2UW.
- the winding direction with respect to the teeth 34 is opposite to each other and the pair of two second U-phase coils 38Ub adjacent to each other in the circumferential direction and the winding direction with respect to the teeth 34 are opposite to each other in the circumferential direction. And two sets of two second V-phase coils 38Va adjacent to each other.
- the winding direction with respect to the teeth 34 is opposite to each other and the pair of two second V-phase coils 38Vb adjacent to each other in the circumferential direction and the winding direction with respect to the teeth 34 are opposite to each other in the circumferential direction.
- the second UW coil group G2UW includes a pair of two second U-phase coils 38Ua adjacent to each other in the circumferential direction and the winding direction with respect to the teeth 34, and the winding directions with respect to the teeth 34 are opposite to each other in the circumferential direction. And two sets of two second W-phase coils 38Wb adjacent to each other.
- the phase coils 38Wb are each connected in series. Further, one set of second U-phase coil 38Ub is connected in series to one set of second U-phase coil 38Ua. One set of second V-phase coil 38Vb is connected in series to one set of second V-phase coil 38Va. One set of second W-phase coil 38Wb is connected in series to one set of second W-phase coil 38Wa.
- the pair of first coils 37 are excited so as to form magnetic fields in opposite directions.
- the pair of second coils 38 are excited so as to form magnetic fields in opposite directions.
- the first coil 37 and the second coil 38 excited in opposite directions are alternately arranged in the circumferential direction.
- the electric motor 10 according to the modified example 2 has a larger number of magnetic poles than the first embodiment described above. For this reason, the electric motor 10 which concerns on the modification 2 becomes easy to disperse
- FIG. 9 is a cross-sectional view schematically showing the configuration of the electric motor according to Modification 3 cut along a virtual plane orthogonal to the central axis.
- the magnet 23 is embedded in a plurality of slots provided in the rotor yoke 22.
- the magnet 23 is disposed radially inward from the outer peripheral surface of the rotor yoke 22.
- FIG. 10 is an explanatory diagram illustrating current waveforms of the first U phase and the second U phase supplied to the electric motor according to the second embodiment.
- FIG. 11 is an explanatory diagram for explaining the amount of change in the average torque and the magnitude of the torque ripple with respect to the phase difference between the phase of the first motor drive current and the second motor drive current.
- the electric motor 10 and the electric motor control device 100 according to the second embodiment are the same as the electric motor 10 and the electric motor control device 100 according to the first embodiment shown in FIGS. 1 to 6, but the operation of the phase difference adjustment unit 40 ⁇ / b> B of the control device 40. Is different.
- description will be made with reference to FIGS. 1 to 6, 10, and 11 as appropriate.
- symbol is attached
- the main control unit 41 acquires the steering torque T input to the input shaft 82a from the torque sensor 91a.
- the main control unit 41 calculates a current value for rotationally driving the motor rotor 20 as a command value according to the information acquired from the torque sensor 91a.
- the first coil system control unit 42 calculates a first pulse width modulation signal having a predetermined duty ratio based on the command value of the main control unit 41.
- the first coil system control unit 42 sends information on the first pulse width adjustment signal to the first phase adjustment unit 43.
- the second coil system control unit 44 calculates a second pulse width modulation signal having a predetermined duty ratio based on the command value of the main control unit 41.
- the second coil system control unit 44 sends information on the second pulse width adjustment signal to the second phase adjustment unit 45.
- the first phase adjustment unit 43 and the second phase adjustment unit 45 adjust the phase of the current supplied to the second coil group G2 to advance with respect to the phase of the current supplied to the first coil group G1.
- the first phase adjustment unit 43 sends the information of the adjusted first pulse width adjustment signal to the first gate drive circuit 51.
- the second phase adjustment unit 45 sends the information of the adjusted second pulse width adjustment signal to the second gate drive circuit 53.
- the first gate drive circuit 51 controls the first inverter 52 based on the information of the first pulse width adjustment signal acquired from the first phase adjustment unit 43.
- the first inverter 52 switches the field effect transistor so as to obtain a three-phase current value according to the duty ratio of the first pulse width modulation signal in the first gate drive circuit 51, thereby providing a first U phase and a first V phase. And a three-phase alternating current including the first W phase.
- the three-phase alternating current generated by the first inverter 52 is sent to the electric motor 10 through three wirings Lu1, Lv1, and Lw1, and excites the plurality of first coils 37.
- the wiring Lu ⁇ b> 1 sends a first U-phase current to the electric motor 10.
- the wiring Lv1 sends a first V-phase current to the electric motor 10.
- the wiring Lw1 sends a first W-phase current to the electric motor 10.
- the second gate drive circuit 53 controls the second inverter 54 based on the information of the second pulse width adjustment signal acquired from the second phase adjustment unit 45.
- the second inverter 54 switches the field effect transistor so as to obtain a three-phase current value according to the duty ratio of the second pulse width modulation signal in the second gate drive circuit 53, so that the second U phase and the second V phase are switched. And a three-phase alternating current including the second W phase.
- the three-phase alternating current generated by the second inverter 54 is sent to the electric motor 10 by the three wires Lu2, Lv2, and Lw2, and excites the plurality of second coils 38.
- the wiring Lu ⁇ b> 2 sends the second U-phase current to the electric motor 10.
- the wiring Lv2 sends a second V-phase current to the electric motor 10.
- the wiring Lw2 sends a second W-phase current to the electric motor 10.
- the first motor driving current is a symmetric three-phase alternating current of the first U phase, the first V phase, and the first W phase, which is a sine wave shifted by 120 ° in electrical angle.
- the second motor drive current is a symmetric three-phase alternating current of the second U phase, the second V phase, and the second W phase, which is a sine wave shifted by 120 ° in electrical angle.
- the phase difference between the first motor driving current and the second motor driving current is such that the phase difference between the first U phase and the second U phase is the phase difference between the first V phase and the second V phase, and the first W phase and the second W phase. Therefore, the phase difference between the first U phase and the second U phase shown in FIG. 10 will be described.
- the first U-phase current Au1 of the first motor drive current is compared to the reference phase in which the phase difference between the first U-phase counter electromotive force and the phase current corresponding to the counter electromotive force is 0 °.
- the phase difference ⁇ 1 is zero.
- three first coil groups G1 are arranged at equal intervals in the circumferential direction of the stator core 31, and therefore only the first coil group G1 is considered regardless of the rotation angle of the motor rotor 20.
- a rotational torque proportional to the current supplied to G1 is generated, and the average torque is considered to be constant.
- the second U-phase current Au2 of the second motor drive current is advanced by a phase difference ⁇ 2 with respect to the reference phase in which the phase difference between the second U-phase back electromotive force and the phase current corresponding to the back electromotive force is zero. It is out. Therefore, due to the interaction between the first coil group G1 and the second coil group G2, as shown in FIG. 11, the average torque Ta decreases as the phase difference ⁇ 2 advances relative to the reference phase.
- the present inventors have reduced the torque ripple Tr as the phase difference ⁇ 2 shown in FIG. 11 advances with respect to the reference phase due to the interaction between the first coil group G1 and the second coil group G2, and the predetermined poles. It was found that the torque ripple Tr started to increase in value. On the other hand, it is assumed that the torque ripple Tr increases as the phase difference ⁇ 2 shown in FIG. 11 is delayed with respect to the reference phase due to the interaction between the first coil group G1 and the second coil group G2.
- phase difference ⁇ 1 when the phase difference ⁇ 1 is 0, the phase difference ⁇ 2 is most preferably 10 ° in electrical angle.
- the electric motor control device 100 includes the electric motor 10, the control device 40, and the motor drive circuit 50.
- the electric motor 10 is divided into a motor rotor 20, a motor stator 30, and at least two systems of a first coil group G1 and a second coil group G2 for every three phases, and a plurality of coils that excite the stator core 31 with a three-phase alternating current. And groups.
- the control device 40 outputs a current value for rotationally driving the motor rotor 20 as a command value.
- the motor drive circuit 50 includes a first motor drive circuit 50A and a second motor drive circuit 50B, and the first motor drive circuit 50A converts a first motor drive current of a three-phase alternating current into a first coil based on the command value described above.
- the second motor drive circuit 50B supplies the second coil drive group 50 with a three-phase AC second motor drive current having a phase difference that advances with respect to the phase of the first motor drive current.
- the control device 40 includes a control unit 40A that calculates a pulse width modulation signal having a predetermined duty ratio as a command value as described above, and a phase difference adjustment unit 40B.
- the phase difference adjustment unit 40B uses the pulse width modulation signal having a predetermined duty ratio as the first pulse width modulation signal, and gives the same duty ratio and phase difference ( ⁇ 2- ⁇ 1) to the first pulse width modulation signal. A two-pulse width modulation signal is calculated.
- the phase difference adjustment unit 40B of the control device 40 adjusts the phase difference ⁇ 2 in a range where the torque ripple reduction rate is larger than the average torque reduction rate, and the electric motor 10 has reduced torque ripple with respect to the motor rotor 20. Control is performed so that rotation is applied.
- the phase difference adjustment unit 40B controls the phase difference ( ⁇ 2- ⁇ 1) to be close to 0 when the average torque Ta is increased, and increases the phase difference ( ⁇ 2- ⁇ 1) when the torque ripple Tr is reduced. It can be performed.
- the first motor drive circuit 50A supplies the first motor drive current to the first coil group G1 by PWM control of the first pulse width modulation signal
- the second motor drive circuit 50B performs PWM control of the second pulse width modulation signal.
- the second motor drive current is supplied to the second coil group G2.
- phase difference ( ⁇ 2 ⁇ 1) described above does not exceed 45 degrees in electrical angle. Since the phase difference ( ⁇ 2 ⁇ 1) does not exceed 45 degrees in electrical angle, it is possible to suppress a decrease in the average torque Ta.
- the output torque Ts is obtained by the following equation (1).
- Tm is a torque generated by the magnetic flux ⁇ m of the magnet 23
- Tr is a reluctance torque.
- the reluctance torque Tr is obtained by the following formula (2).
- Lq is a q-axis inductance.
- Ld is a d-axis inductance.
- Iq is the q-axis component of the armature current.
- Id is the d-axis component of the armature current.
- ⁇ m is the total amount of magnetic flux for each pole pair.
- the electric motor according to the second embodiment includes the first coil group G1 and the second coil group G2.
- the output torque Ts of the electric motor according to the second embodiment can be divided into a torque Tg1 by the first coil group G1 and a torque Tg2 by the second coil group G2. That is, the output torque Ts is obtained by the following equation (4).
- Torque Tg1 is obtained by the following equation (5) when equation (1) is applied.
- Tm1 is a magnet torque by the magnetic flux ⁇ m of the magnet 23 with respect to the first coil group G1.
- Tr1 is a reluctance torque for the first coil group G1.
- torque Tg2 is calculated
- Tm2 is a magnet torque generated by the magnetic flux ⁇ m of the magnet 23 with respect to the second coil group G2.
- Tr2 is a reluctance torque for the second coil group G2.
- FIG. 12 is a diagram showing a vector relationship between the armature magnetic flux of the first coil group and the armature magnetic flux of the second coil group on the dq axis.
- a case where a phase difference 2 ⁇ is provided between the armature magnetic flux mf1 of the first coil group G1 and the armature magnetic flux mf2 of the second coil group G2 with respect to the q axis of the rotor magnetic pole is as follows. To consider.
- the average of the advance values of the first coil group G1 and the second coil group G2 with respect to the q axis of the rotor magnetic pole is ⁇ .
- Tr1 is calculated
- Tm2 is obtained by the following equation (9).
- Tr2 is calculated
- Tr1 + Tr2 0 (11)
- the torque between the two groups by the first coil group G1 and the second coil group G2 is obtained by intentionally shifting the phases of the torque waveforms of the first coil group G1 and the second coil group G2. Ripple components cancel each other. As a result, torque ripple components can be suppressed without adding skew or the like to the stator winding.
- FIG. 13 is a schematic diagram of a vehicle equipped with an electric power steering apparatus including the electric motor according to the first embodiment or the second embodiment.
- the vehicle 101 is equipped with an electric power steering device 80 including the electric motor 10 according to the first embodiment or the second embodiment described above.
- the vehicle 101 may be mounted with the electric motor 10 according to the first embodiment or the second embodiment described above for applications other than the electric power steering device 80.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Steering Mechanism (AREA)
- Windings For Motors And Generators (AREA)
Abstract
Description
(電動パワーステアリング装置)
図1は、実施形態1に係る電動機を備える電動パワーステアリング装置の構成図である。実施形態1は、図1を用いて、電動機10を備える電動パワーステアリング装置80の概要を説明する。
図3は、中心軸を含む仮想平面で実施形態1の電動機の構成を切って模式的に示す断面図である。図4は、実施形態1の電動機の構成を中心軸に直交する仮想平面で切って模式的に示す断面図である。図3に示すように、電動機10は、ハウジング11と、軸受12と、軸受13と、レゾルバ14と、モータロータ20と、ブラシレスモータ用としてのモータステータ30とを備える。
図7は、変形例1に係る第1コイルの配線および第2コイルの配線を示す模式図である。上述した実施形態1で説明したものと同じ構成要素には同一の符号を付して重複する説明は省略する。
図8は、変形例2に係る電動機の構成を中心軸に直交する仮想平面で切って模式的に示す断面図である。図8に示すように、変形例2におけるモータロータ20の極数は、ロータヨーク22の外周側にN極と、S極とがロータヨーク22の周方向に交互に配置された20極である。また、ティース34は、周方向に24配置されている。
図9は、変形例3に係る電動機の構成を中心軸に直交する仮想平面で切って模式的に示す断面図である。変形例3において、マグネット23は、ロータヨーク22に設けられた複数のスロットに埋め込まれている。マグネット23は、ロータヨーク22の外周面よりも径方向内側に配置されている。これにより、変形例3に係る電動機10は、リラクタンストルクを付加したトルクを発生させることができる。
図10は、実施形態2に係る電動機に供給される第1U相および第2U相の電流波形を示す説明図である。図11は、第1モータ駆動電流の位相と第2モータ駆動電流との位相差に対する、平均トルクおよびトルクリップルの大きさ変化量を説明するための説明図である。実施形態2に係る電動機10および電動機制御装置100は、図1から図6に示す実施形態1に係る電動機10及び電動機制御装置100と同じであるが、制御装置40の位相差調整部40Bの動作が異なる。以下、図1から図6、図10及び図11を適宜参照して説明する。なお、上述した実施形態1で説明したものと同じ構成要素には同一の符号を付して重複する説明は省略する。
11 ハウジング
11a 筒状ハウジング
11d 内周面
14 レゾルバ
20 モータロータ
21 シャフト
22 ロータヨーク
23 マグネット
30 モータステータ
31 ステータコア
32 ティース先端
33 バックヨーク
34 ティース
37 第1コイル
37a インシュレータ
37Ua、37Ub 第1U相コイル
37Va、37Vb 第1V相コイル
37Wa、37Wb 第1W相コイル
38 第2コイル
38Ua、38Ub 第2U相コイル
38Va、38Vb 第2V相コイル
38Wa、38Wb 第2W相コイル
40 制御装置
41 主制御部
42 第1コイル系統制御部
43 第1位相調整部
44 第2コイル系統制御部
45 第2位相調整部
51 第1ゲート駆動回路
52 第1インバータ
53 第2ゲート駆動回路
54 第2インバータ
80 電動パワーステアリング装置
100 電動機制御装置
101 車両
G1 第1コイルグループ
G1UV 第1UVコイルグループ
G1VW 第1VWコイルグループ
G1UW 第1UWコイルグループ
G2 第2コイルグループ
G2UV 第2UVコイルグループ
G2VW 第2VWコイルグループ
G2UW 第2UWコイルグループ
Lu1、Lv1、Lw1、Lu2、Lv2、Lw2 配線
Zr 回転中心
Claims (7)
- 環状のバックヨークと、前記バックヨークの内周面で周方向に並んで配置される複数のティースと、を備える環状のステータコアと、
nを自然数としたとき、
隣接して並ぶ前記複数のティースのそれぞれに集中巻きされて第1U相、第1V相および第1W相を含む三相交流を生成する第1インバータにより励磁される複数の第1コイルからなるグループであって、前記ステータコアの周方向に等間隔に3n個配置される第1コイルグループと、
前記第1コイルが集中巻きされる前記ティースとは異なる位置で隣接して並ぶ前記複数のティースのそれぞれに集中巻きされて第2U相、第2V相および第2W相を含む三相交流を生成する第2インバータにより励磁される複数の第2コイルからなるグループであって、前記ステータコアの周方向に等間隔に3n個配置される第2コイルグループと、
を備える電動機。 - 前記複数の第1コイルは、前記第1U相の電流により励磁される複数の第1U相コイルと、前記第1V相の電流により励磁される複数の第1V相コイルと、前記第1W相の電流により励磁される複数の第1W相コイルと、を含み、
前記複数の第2コイルは、前記第2U相の電流により励磁される複数の第2U相コイルと、前記第2V相の電流により励磁される複数の第2V相コイルと、前記第2W相の電流により励磁される複数の第2W相コイルと、を含み、
前記3n個の第1コイルグループは、前記第1U相コイルおよび前記第1V相コイルを含む第1UVコイルグループと、前記第1V相コイルおよび前記第1W相コイルを含む第1VWコイルグループと、前記第1U相コイルおよび前記第1W相コイルを含む第1UWコイルグループと、からなり、
前記3n個の第2コイルグループは、前記第2U相コイルおよび前記第2V相コイルを含む第2UVコイルグループと、前記第2V相コイルおよび前記第2W相コイルを含む第2VWコイルグループと、前記第2U相コイルおよび前記第2W相コイルを含む第2UWコイルグループと、からなる請求項1に記載の電動機。 - 前記第1UVコイルグループは、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第1U相コイルからなる組と、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第1V相コイルからなる組との2組からなり、
前記第1VWコイルグループは、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第1V相コイルからなる組と、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第1W相コイルからなる組との2組からなり、
前記第1UWコイルグループは、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第1U相コイルからなる組と、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第1W相コイルからなる組との2組からなり、
前記第2UVコイルグループは、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第2U相コイルからなる組と、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第2V相コイルからなる組との2組からなり、
前記第2VWコイルグループは、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第2V相コイルからなる組と、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第2W相コイルからなる組との2組からなり、
前記第2UWコイルグループは、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第2U相コイルからなる組と、前記ティースに対する巻き方向が互いに逆方向であって前記ステータコアの周方向で互いに隣接する2つの第2W相コイルからなる組との2組からなる請求項2に記載の電動機。 - 前記第2コイルの前記ティースに対する巻き方向は、前記第1コイルの前記ティースに対する巻き方向と逆方向である請求項1または2に記載の電動機。
- 前記nは奇数である請求項1から4のいずれか1項に記載の電動機。
- 前記請求項1から5のいずれか1項に記載された電動機により補助操舵トルクを得る電動パワーステアリング装置。
- 前記請求項6の電動パワーステアリング装置が搭載された車両。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/125,288 US9705443B2 (en) | 2014-03-20 | 2015-03-19 | Motor, electric power steering device, and vehicle |
| CN201580008668.3A CN105993113B (zh) | 2014-03-20 | 2015-03-19 | 电动机、电动动力转向装置和车辆 |
| JP2015532224A JP5880793B1 (ja) | 2014-03-20 | 2015-03-19 | 電動機、電動パワーステアリング装置および車両 |
| EP15765758.6A EP3121939B1 (en) | 2014-03-20 | 2015-03-19 | Electric motor, electric power steering device, and vehicle |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014058946 | 2014-03-20 | ||
| JP2014-058946 | 2014-03-20 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015141796A1 true WO2015141796A1 (ja) | 2015-09-24 |
Family
ID=54144758
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/058330 WO2015141796A1 (ja) | 2014-03-20 | 2015-03-19 | 電動機、電動パワーステアリング装置および車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9705443B2 (ja) |
| EP (1) | EP3121939B1 (ja) |
| JP (1) | JP5880793B1 (ja) |
| CN (1) | CN105993113B (ja) |
| WO (1) | WO2015141796A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017090514A1 (ja) * | 2015-11-27 | 2017-06-01 | 日立オートモティブシステムズエンジニアリング株式会社 | 回転電機および回転電機システム |
| WO2018135375A1 (ja) * | 2017-01-17 | 2018-07-26 | Ntn株式会社 | 電動モータ |
| CN108352747A (zh) * | 2015-11-20 | 2018-07-31 | 三菱电机株式会社 | 旋转电机 |
| CN113054812A (zh) * | 2019-12-27 | 2021-06-29 | 黑龙江省国特尔机电科技有限责任公司 | 一种电动机定子槽位降级单线圈绕线方法 |
| CN113054777A (zh) * | 2019-12-27 | 2021-06-29 | 黑龙江省国特尔机电科技有限责任公司 | 一种发电机定子槽位降级单组线圈绕制方法 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10804765B2 (en) | 2015-11-27 | 2020-10-13 | Hitachi, Ltd. | Electromechanical integral motor |
| US10063180B2 (en) * | 2017-01-31 | 2018-08-28 | Ford Global Technologies, Llc | Multiple inverter hybrid drive system |
| NL2019306B1 (en) * | 2017-07-20 | 2019-02-12 | E Traction Europe Bv | Cooling jacket and in-wheel motor with a cooling jacket |
| DE102017122069A1 (de) * | 2017-09-22 | 2019-03-28 | Illinois Tool Works Inc. | Orbitalschweißvorrichtung mit verbesserter Sicherheit und verringerter Ausfallwahrscheinlichkeit |
| DE102018200995A1 (de) * | 2018-01-23 | 2019-07-25 | Robert Bosch Gmbh | Verfahren zum Betrieb eines Lenksystems mit einer Kompensationsvorrichtung zur Reduktion einer Drehmomentwelligkeit einer Drehstrommaschine |
| CN112672945B (zh) | 2018-09-11 | 2022-11-29 | 日本精工株式会社 | 辅助机构和电动助力转向装置 |
| JP7205272B2 (ja) * | 2019-02-08 | 2023-01-17 | 株式会社デンソー | 電機子及び回転電機 |
| CN111756202B (zh) * | 2020-05-18 | 2021-12-31 | 舒航(苏州)机电科技有限公司 | 一种双移30度冗余转向电机单元 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011114941A (ja) * | 2009-11-26 | 2011-06-09 | Asmo Co Ltd | モータ |
| WO2013080374A1 (ja) * | 2011-12-02 | 2013-06-06 | 三菱電機株式会社 | 永久磁石型集中巻モータ |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6281609B1 (en) * | 1998-05-29 | 2001-08-28 | Ricoh Company, Ltd. | Direct-current brushless motor, and polygon scanner and image forming apparatus having the same and a method thereof |
| FR2868620B1 (fr) * | 2004-03-31 | 2006-07-21 | Valeo Equip Electr Moteur | Induit polyphase pour machine electrique tournante, notamment un alternateur pour vehicule automobile, et son procede de fabrication |
| JP4251196B2 (ja) | 2006-06-16 | 2009-04-08 | トヨタ自動車株式会社 | ステアリング装置用モータ |
| JP4582230B2 (ja) * | 2007-11-26 | 2010-11-17 | 株式会社デンソー | 回転電機の固定子および回転電機 |
| JP5624330B2 (ja) * | 2009-06-24 | 2014-11-12 | 株式会社デンソー | モータ |
| DE102010046906B4 (de) | 2009-10-02 | 2019-12-24 | Denso Corporation | Motor |
| JP5073005B2 (ja) * | 2010-04-27 | 2012-11-14 | 三菱電機株式会社 | 回転電機 |
| CN102290940B (zh) * | 2010-06-18 | 2015-08-19 | 艾默生电气公司 | 三相多速电动机的3t-y绕组连接 |
| US8916999B2 (en) * | 2011-01-01 | 2014-12-23 | Asmo Co., Ltd. | Motors containing segment conductor coils |
| EP2966755B1 (en) * | 2013-03-08 | 2020-04-22 | Mitsubishi Electric Corporation | Multi-winding multi-phase ac motor and electric power-steering device |
-
2015
- 2015-03-19 JP JP2015532224A patent/JP5880793B1/ja active Active
- 2015-03-19 EP EP15765758.6A patent/EP3121939B1/en active Active
- 2015-03-19 US US15/125,288 patent/US9705443B2/en active Active
- 2015-03-19 WO PCT/JP2015/058330 patent/WO2015141796A1/ja active Application Filing
- 2015-03-19 CN CN201580008668.3A patent/CN105993113B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011114941A (ja) * | 2009-11-26 | 2011-06-09 | Asmo Co Ltd | モータ |
| WO2013080374A1 (ja) * | 2011-12-02 | 2013-06-06 | 三菱電機株式会社 | 永久磁石型集中巻モータ |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108352747A (zh) * | 2015-11-20 | 2018-07-31 | 三菱电机株式会社 | 旋转电机 |
| WO2017090514A1 (ja) * | 2015-11-27 | 2017-06-01 | 日立オートモティブシステムズエンジニアリング株式会社 | 回転電機および回転電機システム |
| CN108352750A (zh) * | 2015-11-27 | 2018-07-31 | 日立汽车系统工程株式会社 | 旋转电机以及旋转电机系统 |
| JPWO2017090514A1 (ja) * | 2015-11-27 | 2018-08-30 | 日立オートモティブシステムズエンジニアリング株式会社 | 回転電機および回転電機システム |
| US10447184B2 (en) | 2015-11-27 | 2019-10-15 | Hitachi Automotive Systems Engineering, Ltd. | Rotating electrical machine and rotating electrical machine system |
| CN108352750B (zh) * | 2015-11-27 | 2020-01-10 | 日立汽车系统工程株式会社 | 旋转电机以及旋转电机系统 |
| WO2018135375A1 (ja) * | 2017-01-17 | 2018-07-26 | Ntn株式会社 | 電動モータ |
| EP3573217A4 (en) * | 2017-01-17 | 2020-10-21 | NTN Corporation | ELECTRIC MOTOR |
| CN113054812A (zh) * | 2019-12-27 | 2021-06-29 | 黑龙江省国特尔机电科技有限责任公司 | 一种电动机定子槽位降级单线圈绕线方法 |
| CN113054777A (zh) * | 2019-12-27 | 2021-06-29 | 黑龙江省国特尔机电科技有限责任公司 | 一种发电机定子槽位降级单组线圈绕制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015141796A1 (ja) | 2017-04-13 |
| CN105993113A (zh) | 2016-10-05 |
| EP3121939A1 (en) | 2017-01-25 |
| CN105993113B (zh) | 2019-03-01 |
| US9705443B2 (en) | 2017-07-11 |
| US20170111003A1 (en) | 2017-04-20 |
| EP3121939A4 (en) | 2017-11-22 |
| JP5880793B1 (ja) | 2016-03-09 |
| EP3121939B1 (en) | 2020-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5880793B1 (ja) | 電動機、電動パワーステアリング装置および車両 | |
| JP5930131B2 (ja) | 電動機制御装置、電動パワーステアリング装置および車両 | |
| JP6349933B2 (ja) | 電動機、電動パワーステアリング装置および車両 | |
| EP2933917B1 (en) | Method for controlling brushless motor, device for controlling brushless motor, and electric power steering device | |
| JP2008086064A (ja) | ブラシレスモータ | |
| JP5897298B2 (ja) | ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置 | |
| JP2011235811A (ja) | 電動式パワーステアリング装置用モータ | |
| WO2008066061A1 (fr) | Moteur sans balai | |
| JP2008301652A (ja) | 永久磁石式回転電機およびそれを用いた電動パワーステアリング装置 | |
| JP2008120214A (ja) | 電動パワーステアリング装置 | |
| JP2006050709A (ja) | 電動パワーステアリング装置 | |
| US8049449B2 (en) | Brushless motor control method and brushless motor | |
| US7902709B2 (en) | Brush-less motor and electric power steering device having brush-less motor | |
| JP4501683B2 (ja) | 永久磁石回転電機及びそれを用いた車載電動アクチュエータ装置用電機システム並びに電動パワーステアリング装置用電機システム | |
| JP6838840B2 (ja) | ブラシレスモータ及び電動パワーステアリング装置用モータ | |
| JP2014183613A (ja) | ブラシレスモータの制御方法及び制御装置 | |
| JP5695366B2 (ja) | パワーステアリング用トルクセンサ及びこれを備える電動式パワーステアリング装置 | |
| JP2016010270A (ja) | 回転電機及び回転電機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2015532224 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15765758 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015765758 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015765758 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15125288 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |