WO2015141722A1 - 宇宙用装置、デブリ除去システム及びデブリ除去方法 - Google Patents
宇宙用装置、デブリ除去システム及びデブリ除去方法 Download PDFInfo
- Publication number
- WO2015141722A1 WO2015141722A1 PCT/JP2015/058048 JP2015058048W WO2015141722A1 WO 2015141722 A1 WO2015141722 A1 WO 2015141722A1 JP 2015058048 W JP2015058048 W JP 2015058048W WO 2015141722 A1 WO2015141722 A1 WO 2015141722A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- space
- space device
- satellite
- debris
- artificial satellite
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 62
- 230000001141 propulsive effect Effects 0.000 claims abstract description 5
- 238000012544 monitoring process Methods 0.000 claims description 42
- 230000008569 process Effects 0.000 claims description 13
- 230000032258 transport Effects 0.000 abstract description 11
- 238000013459 approach Methods 0.000 abstract description 5
- 239000000853 adhesive Substances 0.000 description 8
- 230000001070 adhesive effect Effects 0.000 description 8
- 238000012423 maintenance Methods 0.000 description 7
- 230000005856 abnormality Effects 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 238000007599 discharging Methods 0.000 description 3
- 235000015842 Hesperis Nutrition 0.000 description 2
- 235000012633 Iberis amara Nutrition 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000006261 foam material Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000008439 repair process Effects 0.000 description 2
- 206010010144 Completed suicide Diseases 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 238000004880 explosion Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000004449 solid propellant Substances 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/52—Protection, safety or emergency devices; Survival aids
- B64G1/56—Protection against meteoroids or space debris
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/64—Systems for coupling or separating cosmonautic vehicles or parts thereof, e.g. docking arrangements
- B64G1/646—Docking or rendezvous systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/10—Artificial satellites; Systems of such satellites; Interplanetary vehicles
- B64G1/1078—Maintenance satellites
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/10—Artificial satellites; Systems of such satellites; Interplanetary vehicles
- B64G1/1078—Maintenance satellites
- B64G1/1081—Maintenance satellites for debris removal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/24—Guiding or controlling apparatus, e.g. for attitude control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/24—Guiding or controlling apparatus, e.g. for attitude control
- B64G1/242—Orbits and trajectories
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/40—Arrangements or adaptations of propulsion systems
- B64G1/403—Solid propellant rocket engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/40—Arrangements or adaptations of propulsion systems
- B64G1/405—Ion or plasma engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/62—Systems for re-entry into the earth's atmosphere; Retarding or landing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/64—Systems for coupling or separating cosmonautic vehicles or parts thereof, e.g. docking arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G4/00—Tools specially adapted for use in space
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/24—Guiding or controlling apparatus, e.g. for attitude control
- B64G1/36—Guiding or controlling apparatus, e.g. for attitude control using sensors, e.g. sun-sensors, horizon sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/24—Guiding or controlling apparatus, e.g. for attitude control
- B64G1/36—Guiding or controlling apparatus, e.g. for attitude control using sensors, e.g. sun-sensors, horizon sensors
- B64G1/361—Guiding or controlling apparatus, e.g. for attitude control using sensors, e.g. sun-sensors, horizon sensors using star sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/24—Guiding or controlling apparatus, e.g. for attitude control
- B64G1/36—Guiding or controlling apparatus, e.g. for attitude control using sensors, e.g. sun-sensors, horizon sensors
- B64G1/369—Guiding or controlling apparatus, e.g. for attitude control using sensors, e.g. sun-sensors, horizon sensors using gyroscopes as attitude sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G4/00—Tools specially adapted for use in space
- B64G2004/005—Robotic manipulator systems for use in space
Definitions
- the present invention relates to a space device, a debris removal system using the space device, a debris removal method, and the like.
- a small space debris is negatively charged using the plasma environment in outer space, the electric field force is applied in a direction to reduce the debris velocity, the debris altitude is lowered, and the debris enters the atmosphere for incineration.
- a technique for removing the light is proposed (see Patent Document 1).
- a technique has been proposed in which space debris is collected using a debris removing device configured by covering a foam material with a jacket made of a plurality of fabric layers (see Patent Document 2). According to this technique, the space debris collides with the jacket and is crushed into a plurality of pieces, and these pieces can be captured and accumulated by the foam material.
- Patent Document 1 and Patent Document 2 only incinerate and collect minute space debris and relatively small space debris. To remove relatively large space debris, It is not suitable. Regarding the removal of relatively large space debris, there are piles of difficult problems such as the approach to the target debris and the debris capture / rotation stationary technology have not been established yet and are not cost effective. This is the current situation.
- the present invention has been made in view of such circumstances, and a debris removal system capable of efficiently removing space debris of various sizes including relatively large ones, and a space device used therefor And to provide.
- a space device includes an adhesive portion that adheres to an object existing in outer space, and a propulsion portion that obtains propulsive force, and adheres to the object at the adhesive portion.
- the object is transported to a predetermined target position by moving together with the object by the propulsion unit.
- the mother machine according to the present invention can be mounted with the space device and is configured to release the space device into outer space.
- the mother machine equipped with the space device is launched into outer space to bring the mother device closer to the object, the space device is released from the mother machine in outer space, and the space device is bonded to the object at the bonding portion. Then, the object can be transported to a predetermined target position by moving the space device by the propulsion unit. Therefore, for example, when the object is space debris, the space debris can be transported to the atmosphere by the space device and incinerated and removed. At this time, even if the space debris is relatively large, it can be transported using a plurality of space devices. On congested orbits, the probability of collision is high, and rockets and satellites may be launched in the future because of the popular orbits. By arranging the mother machine there, it can be removed efficiently. Further, when the object is a normal artificial satellite, the artificial satellite can be transported to a predetermined target position (for example, a target position on another orbit) by the space device. In this way, various missions can be performed in the space for space.
- a predetermined target position for example, a
- the space device according to the present invention may not have the rotation preventing means for preventing the rotation of the object.
- the space device and the space debris may rotate together as long as they are bonded, even if the rotation is not prevented. What is necessary to make the space debris enter the atmosphere is a force (braking force) that decelerates the space debris, and even when the space debris is rotating, it is time to apply such a braking force. is there.
- a force braking force
- the target artificial satellite does not rotate out of control, so it is not necessary to prevent the rotation from occurring. Therefore, the space device does not need to have the rotation prevention means, and can be downsized.
- an autonomous control unit for controlling its own position and posture may be provided.
- a mother machine having a slave unit control unit for controlling the position and orientation of the space device can also be employed.
- the position and orientation of the space device can be controlled, so that the space device can be easily adhered to the object.
- the debris removal system removes the space debris existing in the outer space using the already-described space device, and moves the space device closer to the space debris to make the space debris at the bonding portion.
- the space device propulsion unit moves the space device together with the space debris toward the atmosphere.
- a propulsion control unit that controls the unit.
- the debris removal method is a method for removing space debris existing in outer space using the already-described space device, and includes a guiding step for moving the space device closer to the space debris, and an adhesion portion.
- the space device In the state of bonding the space device to the space debris and the space device bonded to the space debris, the space device is moved toward the atmosphere by moving the space device toward the atmosphere at the propulsion unit of the space device. A transporting process for transporting.
- the space device is moved close to the space debris, the space device is bonded to the space debris by the bonding portion, and the space device is bonded to the space debris, and the space device propulsion portion
- the space debris can be transported to the atmosphere and the space debris can be incinerated and removed, or the space debris can be moved to a trajectory (graveyard trajectory) with a low possibility of collision.
- a trajectory graviteyard trajectory
- the debris removal method includes a debris state grasping step for grasping the shape, the center of gravity, the weight, the state of thermal control and / or the rotation state of the space debris after the guiding step and before the adhering step. be able to.
- a debris control step of controlling the attitude of the space debris can be included after the bonding step.
- the space debris posture can be controlled after the space device is adhered to the space debris.
- the satellite transport system transports an artificial satellite existing in the first orbit of outer space using the already-described space device, and moves the space device closer to the artificial satellite.
- the guidance control unit that bonds the space device to the artificial satellite in the first orbit at the bonding unit, and the space device with the satellite in the space unit propulsion unit with the space device bonded to the satellite
- a propulsion control unit that controls the propulsion unit of the space device to move toward a second orbit different from the first orbit.
- the satellite transport method according to the present invention is a method for transporting an artificial satellite existing in the first orbit of outer space using the already-described space device, and guiding the space device to move closer to the artificial satellite.
- a step of bonding the space device to the satellite at the bonding portion, and the space device along with the satellite in the first orbit in the state where the space device is bonded to the satellite. Includes a transporting step of transporting the satellite from the first orbit to the second orbit by moving to a different second orbit.
- the space device is moved closer to an artificial satellite existing on the first orbit of the outer space (for example, a low orbit with an altitude of 200 km to 1000 km), and the space device becomes an artificial satellite at the bonding portion.
- the artificial satellite can be transported to a second orbit different from the first orbit by bonding and moving the space device by the propulsion unit of the space device.
- An artificial satellite that exists on the geostationary orbit as the first orbit can be transported to the graveyard orbit (orbit slightly higher than the geostationary orbit) as the second orbit.
- a control unit autonomous control unit or slave unit control
- the attitude and position of the space device can be controlled, so that the space device can be securely bonded to the artificial satellite in the first orbit.
- the satellite control system controls the position of an artificial satellite existing on a geostationary orbit in outer space using the already-described space device, and moves the space device closer to the artificial satellite.
- the guidance control unit that bonds the space device to the artificial satellite in the geostationary orbit at the bonding portion, and the space device so that the position of the artificial satellite in the geostationary orbit is maintained with the space device adhered to the artificial satellite.
- a propulsion control unit that controls the propulsion unit.
- the satellite control method is a method for controlling the position of an artificial satellite existing on a geostationary orbit in outer space using the already-described space device, and for guiding the space device to move closer to the artificial satellite.
- a position control step for controlling for controlling.
- the space device is moved closer to an artificial satellite existing in a geosynchronous orbit in space, and the space device is bonded to the artificial satellite by the bonding unit, and the propulsion unit of the space device is controlled.
- the position of the artificial satellite on the geostationary orbit can be maintained (orbit maintenance can be realized).
- a guidance control unit installed on the ground can be employed.
- the propulsion control unit one installed on the ground or one installed in a space device can be adopted.
- a space device configured to monitor the state of an artificial satellite orbiting in a predetermined orbit may be employed.
- a space device configured to supply power to the artificial satellite, or a space device (or mother machine) configured to provide a moving unit to the artificial satellite.
- the space device (or mother machine) monitors the state of an artificial satellite orbiting a predetermined orbit, supplies electric power to the artificial satellite, or moves the moving unit to the artificial satellite.
- Various services can be performed in orbit such as providing and moving artificial satellites in the moving part.
- the satellite monitoring system monitors an artificial satellite that circulates in a predetermined orbit in outer space using the already described space device or mother machine, and approaches the space device or mother machine to the artificial satellite. And a guidance control unit for moving, and a monitoring control unit for controlling the space device or the mother machine so as to monitor the state of the artificial satellite with the space device or the mother device.
- the satellite monitoring method is a method for monitoring an artificial satellite that circulates in a predetermined orbit in outer space using the above-described space device, and moves the space device or mother machine closer to the artificial satellite.
- the state of an artificial satellite orbiting in a predetermined orbit can be monitored by a space device (or mother machine).
- a guidance control unit installed on the ground can be employed. Moreover, about the monitoring control part, what was installed in the ground can be employ
- a debris removal system capable of efficiently removing space debris of various sizes including a relatively large one, and a space device used therefor. Become.
- the debris removal system 1 removes space debris existing in outer space.
- a space device (child device) 100 launched into outer space and a space device 100 can be mounted.
- a mother machine 200 configured to discharge the space device 100 to outer space and a guidance control unit 300 that guides the space device 100 to space debris are provided.
- the space device 100 includes an adhesion part 110 that adheres to an object existing in outer space, and a propulsion part 120 that obtains a propulsive force.
- the adhesion part 110 adheres to the object and the propulsion part.
- the bonding part 110 has adhesiveness while absorbing the impact of the space debris, can withstand the temperature difference between the space environment and the space debris, and does not transmit heat to the main body of the space device 100. It is preferable to employ an adhesive. Further, by providing a mechanical gripping mechanism for gripping the space debris together with such an adhesive, it is possible to assist the space device 100 in capturing the space debris.
- the propulsion unit 120 a solid fuel thruster, a small ion thruster, a digital thruster, or the like can be used.
- the space device 100 further includes an autonomous control unit 130 for controlling its own position and posture.
- an autonomous control unit 130 for controlling its own position and posture.
- a gyro sensor a thruster controller that controls a correction thruster for correcting a deviation of a posture angle or a positional deviation detected by a GPS, or the like can be employed.
- the mother machine 200 is configured to be launched into outer space by being attached to a space vehicle such as a rocket with the space device 100 mounted.
- the mother machine 200 in this embodiment includes a slave unit controller 210 for controlling the position and orientation of the space device 100, a slave unit discharge unit 220 for discharging the space device 100 in outer space, and a space device.
- a propulsion control unit 230 that controls the propulsion unit 120 mounted on the vehicle 100 to convey an object to a predetermined target position.
- a thruster controller or the like that controls a correction thruster for correcting an attitude angle deviation or a position deviation detected by a GPS or a start tracker can be employed.
- the slave unit discharge unit 220 an actuator or the like that applies force in the direction of discharge to the space device 100 can be employed.
- a thruster controller or the like that controls a thruster as the propulsion unit 120 may be employed.
- the guidance control unit 300 is provided in a base station installed on the ground, and moves the space device 100 and the mother machine 200 using predetermined communication means to approach the space debris.
- Various control units (slave unit control unit 210 and propulsion control unit 230) mounted on base unit 200 are provided in a base station installed on the ground, and space device 100 is remotely controlled from the base station using a predetermined communication means. You may do it.
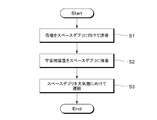
- the mother machine 200 on which the space device 100 is mounted is mounted on the spacecraft and launched to move the mother machine 200 closer to the target space debris (guidance process: S1).
- the mother machine 200 is moved relatively close to the target space debris (for example, a position several kilometers away from the space debris) using, for example, GPS navigation, and several tens of minutes from the space debris using a start tracker or the like. It is possible to adopt a method such as bringing the mother machine 200 closer to a position of m to 100 m, and further bringing the mother machine 200 closer to a position of several meters with an optical camera or the like.
- the space device 100 is released from the mother machine 200, and the slave unit control unit 210 (or the autonomous control unit 130) controls the attitude and position of the space device 100, and the bonding unit 110 provided in the space device 100. Then, the space device 100 is bonded to the space debris (bonding step: S2). Next, the propulsion control unit 230 controls the propulsion unit 120 to move the space device 100 toward the atmosphere, thereby transporting the space debris toward the atmosphere (transportation step: S3). As a result, the space debris can enter the atmosphere and be incinerated. The space device 100 is incinerated with space debris and is discarded.
- the mother device 200 on which the space device 100 is mounted is moved closer to the space debris, the space device 100 is released from the mother device 200, and the space device 100 is released by the bonding portion 110. Can be adhered to the space debris, and the space device 100 is moved by the propulsion unit 120 of the space device 100 to transport the space debris to the atmosphere, and the space debris can be incinerated and removed. At this time, even if the space debris is relatively large, it can be transported using a plurality of space devices 100.
- the example in which the bonding step S2 is performed subsequent to the guiding step S1 is shown.
- the shape of the space debris and A debris state grasping process for grasping the rotation state can also be performed. If this process is adopted, the space debris shape and rotation state are grasped after the mother machine 200 is moved close to the space debris and the space device 100 is discharged, and the optimum discharge position and discharge direction are grasped. In this way, the mother machine 200 takes a final approach, and more reliable release and adhesion are possible.
- the attitude of the space debris is controlled between the bonding step S2 and the transporting step S3.
- the debris control process to perform can also be implemented. If this process is employed, the space debris posture can be controlled after the space device 100 is adhered to the space debris.
- the satellite carrying system according to the present embodiment carries an artificial satellite that exists in outer space. Since the configuration of the satellite transportation system is substantially the same as the configuration of the debris removal system 1 described in the first embodiment, detailed description will be omitted, and in the following description, the configuration of the first embodiment (space Device 100, mother machine 200, etc.).
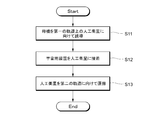
- the mother machine 200 on which the space device 100 is mounted is mounted on the spacecraft and launched, and the mother machine 200 is moved closer to the target artificial satellite (guidance step: S11).
- the mother machine 200 is moved to a position relatively close to the artificial satellite existing on the first orbit (for example, a position 10 km from the artificial satellite), and the GPS relative navigation or the start tracker is performed.
- a method can be employed in which the mother machine 200 is approached to a position of a hundred meters from the artificial satellite using a sensor, and further, the mother machine 200 is approached to a position of several meters from the artificial satellite by a proximity sensor, an optical camera, or the like.
- the space device 100 is released from the mother machine 200, and the slave unit control unit 210 (or the autonomous control unit 130) controls the attitude and position of the space device 100, and the bonding unit 110 provided in the space device 100. Then, the space device 100 is bonded to the artificial satellite (bonding step: S12).
- the propulsion control unit 230 controls the propulsion unit 120 to move the space device 100 toward the second orbit different from the first orbit, thereby transporting the artificial satellite toward the second orbit. (Transportation process: S13). Thereby, the artificial satellite can be moved from the first orbit to the second orbit.
- the space device 100 can coexist with the artificial satellite while being adhered to the artificial satellite.
- the mother machine 200 on which the space device 100 is mounted is moved closer to an artificial satellite existing in the first orbit of outer space (for example, a low orbit with an altitude of 200 km to 1000 km).
- the space device 100 is released from the mother machine 200, the space device 100 is bonded to the artificial satellite by the bonding unit 110, the space device 100 is moved by the propulsion unit 120 of the space device 100, and the artificial satellite is moved to the first position. It can be transported to a second orbit different from the orbit.
- the satellite control system realizes orbit maintenance by controlling the position of an artificial satellite existing in a geosynchronous orbit in outer space. Since the configuration of the satellite control system is substantially the same as the configuration of the debris removal system 1 described in the first embodiment, detailed description will be omitted, and in the following description, the configuration of the first embodiment (space Device 100, mother machine 200, etc.).
- the mother machine 200 equipped with the space device 100 is mounted on the spacecraft and launched, and the mother machine 200 is moved closer to the target artificial satellite (guidance step: S21).
- the guidance step S21 for example, using GPS absolute navigation, the mother machine 200 is moved relatively close to an artificial satellite existing in a geosynchronous orbit (for example, a position 10 km from the artificial satellite), and GPS relative navigation or a starter is used.
- the mother machine 200 is brought closer to a position of 100 m from the artificial satellite, and further, the mother machine 200 is brought closer to the position of several meters from the artificial satellite by a proximity sensor or an optical camera.
- the space device 100 is released from the mother machine 200, and the slave unit control unit 210 (or the autonomous control unit 130) controls the attitude and position of the space device 100, and the bonding unit 110 provided in the space device 100. Then, the space device 100 is bonded to the artificial satellite (bonding step: S22). Next, the propulsion control unit 230 controls the propulsion unit 120 of the space device 100 so as to maintain the position on the geostationary orbit of the artificial satellite to which the space device 100 is bonded (position control step: S23). As a result, the position of the artificial satellite on the geostationary orbit can be maintained (orbit maintenance). Also in this case, the space device 100 can be adhered to the artificial satellite and coexist with the artificial satellite.
- the mother machine 200 on which the space device 100 is mounted is moved closer to an artificial satellite existing on a geostationary orbit in outer space, and the space device 100 is released from the mother machine 200.
- the space unit 100 can be bonded to the artificial satellite by the bonding unit 110, and the propulsion unit 120 of the space device 100 can be controlled to hold the position of the artificial satellite on the geostationary orbit (realize the orbit).
- the satellite monitoring system 1A monitors an artificial satellite that circulates in a predetermined orbit in outer space.
- a space device (slave unit) 100A launched into outer space
- a mother machine 200A configured to be capable of mounting the device 100A and discharging the space device 100 into outer space
- a guidance control unit 300 that guides the space device 100A and the mother device 200A to an artificial satellite. Since the guidance control unit 300 is the same as that described in the first embodiment, detailed description thereof is omitted.
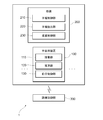
- the space device 100A includes a bonding unit 110 that adheres to an object existing in outer space, a propulsion unit 120 that obtains a propulsive force, an autonomous control unit 130 that controls its own position and posture, an object An image acquisition unit 140 for acquiring the image information, and a power supply unit 150 for supplying power to the object.
- one space device 100A is mounted on the mother machine 200A, but a plurality of space devices 100A may be mounted on the mother machine 200A.
- CMOS complementary metal oxide semiconductor
- CCD charge coupled device
- EMCCD electron multiplying CCD
- the power supply unit 150 a power source (solar cell, fuel cell, chemical cell, etc.), a cable for supplying power from the power source to the object, and the like can be employed.
- the mother machine 200A is configured to be launched into outer space by being attached to a space vehicle such as a rocket with the space device 100A mounted thereon.
- the mother machine 200A in the present embodiment includes a slave unit controller 210 for controlling the position and orientation of the space device 100A, a slave unit discharge unit 220 for discharging the space device 100A in outer space, and a space device.
- a monitoring control unit 240 that controls the image acquisition unit 140 mounted on 100A to monitor the state of the artificial satellite.
- the slave unit control unit 210 and the slave unit discharge unit 220 are the same as those described in the first embodiment, and thus detailed description thereof is omitted.
- the monitoring control unit 240 an operation unit that remotely operates the image acquisition unit 140, an image processing unit that processes an image acquired via the image acquisition unit 140, an abnormality determination unit that determines whether there is an abnormality from the processed image, Etc. can be employed.
- the monitoring control unit can be provided in a base station installed on the ground.
- the space control device 100A may be provided with a monitoring control unit
- the mother machine 200A may be provided with an image acquisition unit and a power supply unit.
- the moving part for example, thruster
- a means for providing an alternative moving part for the artificial satellite is provided in the mother machine 200A or the space device 100A. You can also.
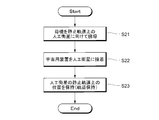
- the mother machine 200A equipped with the space device 100A is mounted on the spacecraft and launched, and the mother machine 200A is moved closer to the target artificial satellite (guidance step: S31).
- the guidance step S31 for example, GPS navigation is used to move the mother machine 200A to a relatively close position to an artificial satellite orbiting a predetermined orbit (for example, a position several kilometers from the artificial satellite), and the artificial satellite is used by using a start tracker or the like. It is possible to adopt a method in which the mother machine 200A is approached from a satellite to a position of several tens to hundreds of meters, and further, the mother machine 200A is approached to a position of several meters from an artificial satellite by an optical camera or the like.
- the space device 100A is released from the mother machine 200A toward the artificial satellite, and the attitude and position of the space device 100A is controlled by the slave device control unit 210 (or the autonomous control unit 130), and the space device near the artificial satellite.
- the space device 100A is allowed to float or the space device 100A is bonded to the artificial satellite with the bonding portion 110 provided in the space device 100A (child machine release step: S32).
- the state of the artificial satellite is monitored using the image acquisition unit 140 of the space device 100A and the monitoring control unit 240 of the mother machine 200A (monitoring step: S33).
- abnormality determination step: S34 an abnormality determination of the artificial satellite is performed using the monitoring control unit 240 of the mother machine 200A (abnormality determination step: S34), and when it is determined that the power supply of the artificial satellite is broken, the power of the space device 100A is Electric power is supplied to the artificial satellite using the supply unit 150 (power supply step: S35). Thereby, it is possible to realize the reuse of the artificial satellite by supplying electric power to the artificial satellite whose power source is broken.
- the state of the artificial satellite orbiting in a predetermined orbit can be monitored by the space device 100A and the mother machine 200A.
- the spacecraft equipped with the new spacecraft is launched toward the motherboard, and the spacecraft is renewed from the mothercraft. It can be filled with various space devices. In this way, since the mother machine can be used for a long time without being disposed of, the burden on the environment is reduced, and the cost for performing a predetermined mission can be reduced.
- the attitude and position of the space device released from the mother machine is controlled using the slave unit control unit and the autonomous control unit has been described.
- the space device released from the mother machine can be bonded to an object (space debris or artificial satellite) without control.
- a debris removal system satellite using a common space equipment and mother machine were shown.
- four services debris removal, satellite transportation, satellite orbit maintenance, satellite monitoring
- satellite transportation business and satellite monitoring business Can be used to remove debris. Therefore, it can be expected that the delay of debris removal due to financial difficulties (absence of sponsor) will be eliminated by using the space device and the mother machine according to the present invention.
- a satellite that is in geostationary orbit is monitored using a common system that functions as a satellite monitoring system, and when this satellite reaches the end of its life, a satellite that has failed using the common system that functions as a debris removal system Can be transported to the atmosphere and removed by incineration.
- a space device is bonded to an object (space debris or an artificial satellite) via an adhesion portion to carry the object or to maintain the orbit of the object.
- an object space debris or an artificial satellite
- an adhesion portion to carry the object or to maintain the orbit of the object.
- a stick-like protrusion that protrudes from the center of the adhesive as the adhesive part to the object is provided, and the space device is adhered to the object with the adhesive part, and after the predetermined mission is completed, the protrusion is The space device can be released from the object by protruding toward the object to release the adhesion state.
- the space device can then re-enter the atmosphere and suicide or move into the graveyard orbit. Since living artificial satellites are usually designed to control only their own bodies, it is preferable to disengage unnecessary space devices from the artificial satellite. In that respect, the space device can be easily detached from the object by adopting the adhesive portion and the simple mechanism (protruding portion) as described above.
- each element provided in each embodiment and its arrangement, material, condition, shape, size, and the like are not limited to those illustrated, and can be appropriately changed.
- each element with which each said embodiment is provided can be combined as much as technically possible, and what combined these is also included in the scope of the present invention as long as it includes the characteristics of the present invention.
- Debris removal system (satellite transportation system, satellite control system) DESCRIPTION OF SYMBOLS 1A ... Satellite monitoring system 100 / 100A ... Space equipment 110 ... Adhesion part 120 ... Propulsion part 130 ... Autonomous control part 200 / 200A ... Mother machine 210 ... Slave machine control part 220 ... Slave machine discharge part 230 ... Propulsion control part 240 ... Monitoring Control unit 300 ... Guidance control unit S1, S11, S21, S31 ... Guidance process S2, S12, S22 ... Adhesion process S3, S13 ... Transport process S23 ... Position control process S33 ... Monitoring process
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Astronomy & Astrophysics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Plasma & Fusion (AREA)
- Health & Medical Sciences (AREA)
- Critical Care (AREA)
- Emergency Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
最初に、図1及び図2を用いて、本発明の第一実施形態について説明する。第一実施形態においては、本発明に係るデブリ除去システムの一例と、これを用いたデブリ除去方法の一例と、について説明することとする。
続いて、図3を用いて、本発明の第二実施形態について説明する。第二実施形態においては、本発明に係る衛星運搬システムの一例と、これを用いた衛星運搬方法の例と、について説明することとする。
続いて、図4を用いて、本発明の第三実施形態について説明する。第三実施形態においては、本発明に係る衛星制御システムの一例と、これを用いた衛星制御方法の例と、について説明することとする。
続いて、図5及び図6を用いて、本発明の第四実施形態について説明する。第四実施形態においては、本発明に係る衛星監視システムの一例と、これを用いた衛星監視方法の一例と、について説明することとする。
1A…衛星監視システム
100・100A…宇宙用装置
110…接着部
120…推進部
130…自律制御部
200・200A…母機
210…子機制御部
220…子機放出部
230…推進制御部
240…監視制御部
300…誘導制御部
S1・S11・S21・S31…誘導工程
S2・S12・S22…接着工程
S3・S13…運搬工程
S23…位置制御工程
S33…監視工程
Claims (18)
- 宇宙空間に存在する対象物に接着する接着部と、
推進力を得るための推進部と、を備え、
前記接着部で前記対象物に接着した状態で前記推進部によって前記対象物とともに移動することにより前記対象物を所定の目標位置へと運搬する、
宇宙用装置。 - 所定の軌道上を周回する人工衛星の状態を監視するように構成される、請求項1に記載の宇宙用装置。
- 前記人工衛星に対して電力を供給するように構成される、請求項2に記載の宇宙用装置。
- 前記人工衛星に対して移動部を提供するように構成される、請求項2又は3に記載の宇宙用装置。
- 請求項1から4の何れか一項に記載の宇宙用装置を搭載可能であって前記宇宙用装置を宇宙空間に放出するように構成される、
母機。 - 所定の軌道上を周回する人工衛星の状態を監視するように構成される、請求項5に記載の母機。
- 前記人工衛星に対して電力を供給するように構成される、請求項6に記載の母機。
- 前記人工衛星に対して移動部を提供するように構成される、請求項6又は7に記載の母機。
- 請求項1から4の何れか一項に記載の宇宙用装置を用いて宇宙空間に存在するスペースデブリを除去するデブリ除去システムであって、
前記宇宙用装置を前記スペースデブリに接近移動させて前記接着部で前記スペースデブリに前記宇宙用装置を接着させる誘導制御部と、
前記宇宙用装置が前記スペースデブリに接着した状態で、前記宇宙用装置の前記推進部で前記宇宙用装置を前記スペースデブリとともに大気圏に向けて移動させるように前記宇宙用装置の前記推進部を制御する推進制御部と、
を備える、デブリ除去システム。 - 請求項1から4の何れか一項に記載の宇宙用装置を用いて宇宙空間の第一の軌道上に存在する人工衛星を運搬する衛星運搬システムであって、
前記宇宙用装置を前記人工衛星に接近移動させて前記接着部で前記第一の軌道上にある前記人工衛星に前記宇宙用装置を接着させる誘導制御部と、
前記宇宙用装置が前記人工衛星に接着した状態で、前記宇宙用装置の前記推進部で前記宇宙用装置を前記人工衛星とともに前記第一の軌道とは異なる第二の軌道に向けて移動させるように前記宇宙用装置の前記推進部を制御する推進制御部と、
を備える、衛星運搬システム。 - 請求項1から4の何れか一項に記載の宇宙用装置を用いて宇宙空間の静止軌道上に存在する人工衛星の位置を制御する衛星制御システムであって、
前記宇宙用装置を前記人工衛星に接近移動させて前記接着部で前記静止軌道上にある前記人工衛星に前記宇宙用装置を接着させる誘導制御部と、
前記宇宙用装置が前記人工衛星に接着した状態で、前記人工衛星の前記静止軌道上の位置を保持するように前記宇宙用装置の前記推進部を制御する推進制御部と、
を備える、衛星制御システム。 - 請求項2から4の何れか一項に記載の宇宙用装置又は請求項6から8の何れか一項に記載の母機を用いて宇宙空間の所定の軌道上を周回する人工衛星を監視する衛星監視システムであって、
前記宇宙用装置又は前記母機を前記人工衛星に接近移動させる誘導制御部と、
前記宇宙用装置又は前記母機で前記人工衛星の状態を監視するように前記宇宙用装置又は前記母機を制御する監視制御部と、
を備える、衛星監視システム。 - 請求項1から4の何れか一項に記載の宇宙用装置を用いて宇宙空間に存在するスペースデブリを除去するデブリ除去方法であって、
前記宇宙用装置を前記スペースデブリに接近移動させる誘導工程と、
前記接着部で前記宇宙用装置を前記スペースデブリに接着させる接着工程と、
前記宇宙用装置が前記スペースデブリに接着した状態で、前記宇宙用装置の前記推進部で前記宇宙用装置を大気圏に向けて移動させることにより前記スペースデブリを大気圏に向けて運搬する運搬工程と、
を含む、デブリ除去方法。 - 前記誘導工程の後であって前記接着工程の前に、前記スペースデブリの形状及び/又は回転状態を把握するデブリ状態把握工程を含む、請求項13に記載のデブリ除去方法。
- 前記接着工程の後に、前記スペースデブリの姿勢を制御するデブリ制御工程を含む、請求項13又は14に記載のデブリ除去方法。
- 請求項1から4の何れか一項に記載の宇宙用装置を用いて宇宙空間の第一の軌道上に存在する人工衛星を運搬する衛星運搬方法であって、
前記宇宙用装置を前記人工衛星に接近移動させる誘導工程と、
前記接着部で前記宇宙用装置を前記人工衛星に接着させる接着工程と、
前記宇宙用装置が前記人工衛星に接着した状態で、前記宇宙用装置の前記推進部で前記宇宙用装置を前記人工衛星とともに前記第一の軌道とは異なる第二の軌道へと移動させることにより前記人工衛星を前記第一の軌道から前記第二の軌道へと運搬する運搬工程と、
を含む、衛星運搬方法。 - 請求項1から4の何れか一項に記載の宇宙用装置を用いて宇宙空間の静止軌道上に存在する人工衛星の位置を制御する衛星制御方法であって、
前記宇宙用装置を前記人工衛星に接近移動させる誘導工程と、
前記接着部で前記宇宙用装置を前記人工衛星に接着させる接着工程と、
前記宇宙用装置が前記人工衛星に接着した状態で、前記人工衛星の前記静止軌道上の位置を保持するように前記宇宙用装置の前記推進部を制御する位置制御工程と、
を含む、衛星制御方法。 - 請求項2から4の何れか一項に記載の宇宙用装置又は請求項6から8の何れか一項に記載の母機を用いて宇宙空間の所定の軌道上を周回する人工衛星を監視する衛星監視方法であって、
前記宇宙用装置又は前記母機を前記人工衛星に接近移動させる誘導工程と、
前記宇宙用装置又は前記母機で前記人工衛星の状態を監視する監視工程と、
を含む、衛星監視方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15765919.4A EP3121122B1 (en) | 2014-03-18 | 2015-03-18 | Debris removal system and debris removal method |
| US15/126,274 US10464696B2 (en) | 2014-03-18 | 2015-03-18 | Space device, debris removal system, and method for removing debris |
| RU2016140860A RU2678392C2 (ru) | 2014-03-18 | 2015-03-18 | Устройство для применения в космосе, система удаления мусора и способ удаления мусора |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-055202 | 2014-03-18 | ||
| JP2014055202A JP6472600B2 (ja) | 2014-03-18 | 2014-03-18 | 宇宙用装置、デブリ除去システム及びデブリ除去方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015141722A1 true WO2015141722A1 (ja) | 2015-09-24 |
Family
ID=54144686
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/058048 WO2015141722A1 (ja) | 2014-03-18 | 2015-03-18 | 宇宙用装置、デブリ除去システム及びデブリ除去方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10464696B2 (ja) |
| EP (1) | EP3121122B1 (ja) |
| JP (1) | JP6472600B2 (ja) |
| RU (1) | RU2678392C2 (ja) |
| WO (1) | WO2015141722A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6722514B2 (ja) | 2016-05-27 | 2020-07-15 | 株式会社アストロスケール | 捕獲プレート、宇宙用装置及び捕獲方法 |
| KR101899218B1 (ko) * | 2016-11-21 | 2018-09-17 | 한찬희 | 우주쓰레기 처리시스템 |
| RU2022100795A (ru) * | 2017-07-21 | 2022-02-08 | Нортроп Грамман Системз Корпорейшн | Обслуживающие устройства космического аппарата и соответствующие узлы, системы и способы |
| CN109649695B (zh) * | 2018-12-12 | 2021-12-14 | 上海航天控制技术研究所 | 一种货运飞船对接机构主驱动电机的驱动控制方法及装置 |
| CN113631481A (zh) | 2019-01-15 | 2021-11-09 | 诺思路·格鲁曼系统公司 | 航天器服务装置及相关组件、系统和方法 |
| EP3915883A4 (en) | 2019-01-21 | 2022-08-31 | Sky Perfect JSAT Corporation | SPACECRAFT AND CONTROL SYSTEM |
| RU2760878C1 (ru) * | 2020-09-08 | 2021-12-01 | Федеральное государственное казенное военное образовательное учреждение высшего образования "Военная академия Ракетных войск стратегического назначения имени Петра Великого" МО РФ | Способ защиты космических аппаратов |
| US20240116654A1 (en) * | 2021-01-15 | 2024-04-11 | Astroscale Holdings Inc. | Method and system for multi-object space debris removal |
| WO2023157952A1 (ja) | 2022-02-17 | 2023-08-24 | 株式会社アストロスケール | デブリ除去システム及びデブリ除去方法 |
| CN114750982A (zh) * | 2022-06-14 | 2022-07-15 | 星河动力(北京)空间科技有限公司 | 空间碎片清除方法、装置、系统及存储介质 |
| WO2024023971A1 (en) * | 2022-07-27 | 2024-02-01 | Patchedconics, Llc | Debris removal spacecraft |
| CN118372986A (zh) * | 2024-06-25 | 2024-07-23 | 上海卫星互联网研究院有限公司 | 一种母星及子母卫星组合体 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004098959A (ja) * | 2002-09-12 | 2004-04-02 | National Aerospace Laboratory Of Japan | スペースデブリ軌道変換用テザー装置 |
| US20050151022A1 (en) * | 2004-01-09 | 2005-07-14 | D'ausilio Robert F. | In orbit space transportation & recovery system |
| US20120076629A1 (en) * | 2011-12-06 | 2012-03-29 | Altius Space Machines | Sticky Boom Non-Cooperative Capture Device |
| JP2012236591A (ja) * | 2011-05-09 | 2012-12-06 | Astrium Gmbh | スペースデブリを捕獲する装置 |
| WO2013065795A1 (ja) * | 2011-11-02 | 2013-05-10 | 株式会社Ihi | スペースデブリ除去装置及びスペースデブリ除去方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5511748A (en) * | 1993-11-12 | 1996-04-30 | Scott; David R. | Method for extending the useful life of a space satellite |
| US7370834B2 (en) | 1993-11-12 | 2008-05-13 | The Baron Company, Ltd. | Apparatus and methods for in-space satellite operations |
| US5806802A (en) * | 1993-11-12 | 1998-09-15 | Scott; David D. | Apparatus and methods for in-space satellite operations |
| EP1199709A1 (en) * | 2000-10-20 | 2002-04-24 | Telefonaktiebolaget Lm Ericsson | Error Concealment in relation to decoding of encoded acoustic signals |
| US6655637B1 (en) * | 2002-06-24 | 2003-12-02 | The Aerospace Corporation | Spacecraft for removal of space orbital debris |
| WO2005118394A1 (en) * | 2004-06-04 | 2005-12-15 | Intersecure Logic Limited | Propulsion unit for spacecraft, servicing system for providing in-space service operations, and modular spacecraft |
| US7240879B1 (en) | 2005-05-06 | 2007-07-10 | United States of America as represented by the Administration of the National Aeronautics and Space Administration | Method and associated apparatus for capturing, servicing and de-orbiting earth satellites using robotics |
| US7374134B2 (en) * | 2005-08-29 | 2008-05-20 | Honeywell International Inc. | Systems and methods for semi-permanent, non-precision inspace assembly of space structures, modules and spacecraft |
| US7823837B2 (en) | 2006-03-31 | 2010-11-02 | The Boeing Company | Two part spacecraft servicing vehicle system with adaptors, tools, and attachment mechanisms |
| US7979060B2 (en) * | 2007-10-25 | 2011-07-12 | Microsoft Corporation | Privacy-enabled telephone directory |
| JP2010069973A (ja) | 2008-09-17 | 2010-04-02 | Kyushu Institute Of Technology | スペースデブリ除去方法及びその装置 |
| DE102010008376A1 (de) | 2010-02-17 | 2011-08-18 | Astrium GmbH, 82024 | Vorrichtung zum Eliminieren von Weltraumschrott im Orbit |
| JP5629957B2 (ja) * | 2010-08-23 | 2014-11-26 | 独立行政法人 宇宙航空研究開発機構 | 宇宙空間用シリコーン粘着性物品およびその使用方法 |
| US20140064905A1 (en) * | 2011-01-10 | 2014-03-06 | Sri International | Electroadhesive System for Capturing Objects |
| ITMI20111332A1 (it) | 2011-07-18 | 2013-01-19 | Orbit S R L D | Dispositivo per la deorbitazione di satelliti artificiali. |
| US9434485B1 (en) * | 2013-01-25 | 2016-09-06 | Stephen C. Lehocki | Multi-purpose cargo delivery and space debris removal system |
| CN103224037B (zh) * | 2013-05-17 | 2015-04-08 | 哈尔滨工业大学 | 一种航天器空间可多次反复对接方法 |
| CN103241393B (zh) * | 2013-05-17 | 2015-06-03 | 哈尔滨工业大学 | 一种航天器空间牢固对接方法 |
| RU138497U1 (ru) * | 2013-11-13 | 2014-03-20 | Общество с ограниченной ответственностью "НИИЦ "МАИ-ЛАСТАР" | Устройство для увода космического мусора с орбит полезных нагрузок |
-
2014
- 2014-03-18 JP JP2014055202A patent/JP6472600B2/ja active Active
-
2015
- 2015-03-18 US US15/126,274 patent/US10464696B2/en active Active
- 2015-03-18 WO PCT/JP2015/058048 patent/WO2015141722A1/ja active Application Filing
- 2015-03-18 RU RU2016140860A patent/RU2678392C2/ru active
- 2015-03-18 EP EP15765919.4A patent/EP3121122B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004098959A (ja) * | 2002-09-12 | 2004-04-02 | National Aerospace Laboratory Of Japan | スペースデブリ軌道変換用テザー装置 |
| US20050151022A1 (en) * | 2004-01-09 | 2005-07-14 | D'ausilio Robert F. | In orbit space transportation & recovery system |
| JP2012236591A (ja) * | 2011-05-09 | 2012-12-06 | Astrium Gmbh | スペースデブリを捕獲する装置 |
| WO2013065795A1 (ja) * | 2011-11-02 | 2013-05-10 | 株式会社Ihi | スペースデブリ除去装置及びスペースデブリ除去方法 |
| US20120076629A1 (en) * | 2011-12-06 | 2012-03-29 | Altius Space Machines | Sticky Boom Non-Cooperative Capture Device |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3121122A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| US10464696B2 (en) | 2019-11-05 |
| JP2015174647A (ja) | 2015-10-05 |
| RU2016140860A (ru) | 2018-04-18 |
| US20170081051A1 (en) | 2017-03-23 |
| EP3121122A1 (en) | 2017-01-25 |
| EP3121122A4 (en) | 2017-11-15 |
| JP6472600B2 (ja) | 2019-02-20 |
| RU2678392C2 (ru) | 2019-01-28 |
| EP3121122B1 (en) | 2021-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6472600B2 (ja) | 宇宙用装置、デブリ除去システム及びデブリ除去方法 | |
| JP7297988B2 (ja) | 宇宙船作業用デバイス、ならびに関連の組立体、システム、および方法 | |
| US7513460B2 (en) | Method and associated apparatus for capturing, servicing, and de-orbiting earth satellites using robotics | |
| WO2015152376A1 (ja) | デブリ除去装置及びデブリ除去システム | |
| JP2024042103A (ja) | 宇宙船作業用デバイス、ならびに関連の組立体、システム、および方法 | |
| JP6472772B2 (ja) | 対象物の除去方法、運搬方法及び制御方法 | |
| JPWO2020150242A5 (ja) | ||
| RU2666014C1 (ru) | Способ поддержания состава орбитальной группировки автоматических космических аппаратов | |
| King | Saving hubble | |
| KR20150104961A (ko) | 우주 물체 폐기 장치 및 우주 물체 폐기 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15765919 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015765919 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015765919 Country of ref document: EP Ref document number: 15126274 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2016140860 Country of ref document: RU Kind code of ref document: A |