WO2015016346A1 - 処置システム、処置具制御装置、および、処置システムの作動方法 - Google Patents
処置システム、処置具制御装置、および、処置システムの作動方法 Download PDFInfo
- Publication number
- WO2015016346A1 WO2015016346A1 PCT/JP2014/070348 JP2014070348W WO2015016346A1 WO 2015016346 A1 WO2015016346 A1 WO 2015016346A1 JP 2014070348 W JP2014070348 W JP 2014070348W WO 2015016346 A1 WO2015016346 A1 WO 2015016346A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- treatment
- temperature
- unit
- energy
- living tissue
- Prior art date
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/08—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by means of electrically-heated probes
- A61B18/082—Probes or electrodes therefor
- A61B18/085—Forceps, scissors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/0063—Sealing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00642—Sensing and controlling the application of energy with feedback, i.e. closed loop control
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
- A61B2018/00708—Power or energy switching the power on or off
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00886—Duration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00994—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combining two or more different kinds of non-mechanical energy or combining one or more non-mechanical energies with ultrasound
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Plasma & Fusion (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Otolaryngology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Laser Surgery Devices (AREA)
- Thermotherapy And Cooling Therapy Devices (AREA)
- Radiation-Therapy Devices (AREA)
Abstract
Description
<処置システムの構成>
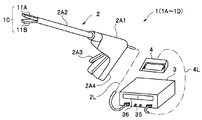
図1に示すように、本実施形態の処置システム1は、処置具2と、処置具制御装置である本体部3と、フットスイッチ4と、を具備する。処置具2は、例えば腹壁を通して腹腔内の生体組織の接合処置等を行う外科手術用エネルギ吻合装置である。
次に、図7のフローチャートに沿って、処置システム1の作動方法について説明する。
例えば、以下のような加熱量設定値Qsetを含む処置条件が、設定操作部35を含む設定部32を介して設定される。
加熱量設定値Qset:800℃秒
下限温度Tmin:50℃
上限温度Tmax:230℃
素子温度設定値Tset:180℃
加熱量設定値Qset:1000℃秒
下限温度Tmin:50℃
上限温度Tmax:190℃
素子温度設定値Tset:190℃
加熱量設定値Qset:2500℃秒
下限温度Tmin:50℃
上限温度Tmax:200℃
素子温度設定値Tset:200℃
加熱量設定値Qset:3500℃秒
下限温度Tmin:50℃
上限温度Tmax:210℃
図2Aに示したように、閉状態の処置部10が、例えば、腹壁を通して腹腔内に挿入される。術者がグリップ2A1の開閉ノブ2A3を握りしめる押圧操作をすると、第1挟持部11Aに対して第2挟持部11Bが開く。そして、処置対象の生体組織LTが、第1挟持部11Aの処置面11SAと第2挟持部11Bの処置面11SBとの間に配置される。この状態で、開閉ノブ2A3が開放されると、弾性部材の付勢力により、第1挟持部11Aに対して第2挟持部11Bが閉じ、図2Bに示すように、処置対象の生体組織LTは、第1挟持部11Aの処置面11SAと第2挟持部11Bの処置面11SBとの間に押圧状態で挟持される。
術者がフットスイッチ4を足で押圧操作する。すると、制御部34は、電源30が発熱用電力(TH)を出力するように制御する。制御部34は、素子温度T1が素子温度設定値Tsetになるように、電源30の出力値Pの定温制御を開始する。
温度測定部39が、組織温度T2を測定する。
制御部34は、組織温度T2が下限温度Tmin以上まで上昇したか判断する。下限温度Tmin以上になったら(YES)、ステップS16に移行する。
このため、下限温度Tmin未満の間(時間0からt0までの間)は、加熱量Qは算出されない。
制御部34は、組織温度T2が上限温度Tmax以上まで上昇したか判断する。上限温度Tmax以上になったら(YES)、ステップS19に移行し処置を中止する。このとき、制御部34が、表示部36に警告を表示することが好ましい。
算出部33は、組織温度T2の時間積分値である加熱量Qを算出する。
(式2)で示される加熱量Qは、例えば1秒毎に、ΔQ(組織温度T2×1秒)が、それまでの加熱量Qに加算される。
制御部34の比較部34Aは、加熱量Qと加熱量設定値Qsetとを比較し、加熱量Qが過熱量設定値Qset以上になる(YES)と、指示部34Bから指示信号が電源30に対して出力され、電源制御部34Cが電源30を制御し、THの出力を終了する。すなわち、加熱量設定値Qsetと加熱量Qとにもとづき、THの出力が終了する。
次に、第1実施形態の変形例1~3の処置システム1A~1C、処置具制御装置、および、処置システムの作動方法について説明する。なお、以下、(処置システム、処置具制御装置、および、処置システム1の作動方法)を、処置システム等という。処置システム1A~1C等は、処置システム1等と類似しているので、同じ機能の構成要素には同じ符号を付し説明は省略する。
変形例1の処置システム1A等では、生体組織に処置エネルギとして光エネルギであるレーザ光が印加される。すなわち、電源はレーザ光を発生する光源に電力を出力する。
変形例2の処置システム1B等では、生体組織に処置エネルギとして超音波エネルギが印加される。すなわち、電源は超音波振動子に電力を出力する。
変形例3の処置システム1C等では、生体組織に処置エネルギとして高周波電力エネルギが印加される。すなわち、電源は高周波電力を出力する。
次に、第2実施形態の処置システム1D等について説明する。処置システム1D等は、処置システム1等と類似しているので、同じ機能の構成要素には同じ符号を付し説明は省略する。
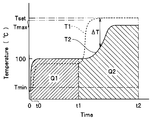
図12に示すように、処置システム1Dでは、HFエネルギの印加終了後に、THエネルギの印加が開始される(時間t=t1)。そして、制御部34は、加熱量Qで定義される組織温度T2の時間積分値にもとづき、処置終了(時間t=t2)を制御する。

例えば、以下のような処置条件が、設定操作部35を含む設定部32により設定される。
HF終了インピーダンスZset:120Ω
素子温度設定値Tset:180℃
加熱量設定値Qset:1000℃秒
処置対象の生体組織LTは、第1挟持部11Aの処置面11SAと第2挟持部11Bの処置面11SBとの間に押圧状態で挟持される。
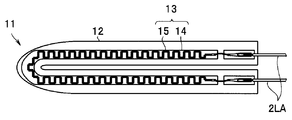
処置部10に生体組織LTを挟持した状態で、術者がフットスイッチ4を足で押圧操作する。すると、制御部34は処置を開始する。すなわち、制御部34は、まず、HF電源30Aが高周波電力(HF)を出力するように制御する。HFは、ケーブル2Lを介して処置具2の電極12A、12Bに伝達される。すると、電極12A、12Bに挟持されている生体組織LTに高周波電力が印加され、生体組織LTはジュール熱により加熱される。
算出部33は、組織温度T2の時間積分値である高周波電力加熱量(第1加熱量)Q1を算出する。
ただし、t1;HFエネルギ印加時間
処置システム1Dでは、HFエネルギ印加を開始すると、HFセンサ31Aが検出するHFの電圧および電流からインピーダンスZが算出部33により算出される。
制御部34は、インピーダンスZが設定された、HF終了インピーダンスZset以上になったら、(YES)、S26において、HF電源30Aを制御しHFの出力を終了する(t=t1)。
制御部34は、HFエネルギにかえてTHエネルギを生体組織LTに印加する制御を開始する。
算出部33は、組織温度T2の時間積分値である第2加熱量(熱エネルギ加熱量)Q2を算出する。すなわち、S28では、THを電気抵抗Rから算出した素子温度T1にもとづき定温制御し生体組織LTに熱エネルギを印加しながら、組織温度T2の時間積分値である第2加熱量Q2が算出される。さらに、算出部33は、第1加熱量Q1と第2加熱量Q2とを加算した合計加熱量QTを算出する。
制御部34は、合計加熱量QTが、加熱量設定値Qset以上になる(YES)と、TH電源30Bを制御し、THの出力を終了する(t=t2)。すなわち、加熱量設定値Qsetと合計加熱量QTとにもとづき、THの出力が終了する。
2・・・処置具
3・・・本体部
10・・・処置部
12・・・伝熱体(電極)
13・・・発熱素子
19・・・温度センサ
30・・・電源
32・・・設定部
33・・・算出部
34・・・制御部
34A・・・比較部
34B・・・指示部
34C・・・電源制御部
35・・・設定操作部
36・・・表示部
39・・・温度測定部
Claims (27)
- 生体組織に処置エネルギを印加する処置具と、
前記処置エネルギに変換するための電力を出力する電源と、
前記処置エネルギが印加された前記生体組織の温度を測定するための温度測定部と、
前記温度測定部が測定する前記生体組織の温度と前記処置エネルギの印加時間とから、前記生体組織の温度の時間積分値を算出する算出部と、
前記算出部が、前記算出部が算出する前記生体組織の温度の前記時間積分値と所定の設定値とを比較する比較部と、
前記比較部が比較した結果に基づき指示を出す指示部と、
を有することを特徴とする処置システム。 - さらに、前記指示部からの指示に基づき、前記処置エネルギの印加が減少または終了するように前記電源を制御する電源制御部を有することを特徴とする請求項1に記載の処置システム。
- さらに、前記指示部からの指示に基づき、告知を行う告知部を有することを特徴とする請求項1に記載の処置システム。
- さらに、前記生体組織の温度の前記時間積分値の目標となる前記所定の設定値を設定する設定部を有することを特徴とする請求項1に記載の処置システム。
- 前記設定部は複数の異なる所定の設定値を記憶する記憶部を有することを特徴とする請求項4に記載の処置システム。
- さらに、前記設定部は複数の異なる所定の設定値に対応した処置条件を記憶し、
前記指示部からの指示に基づき、選択された前記処置条件に基づき前記処置エネルギの印加が減少または終了するように前記電源を制御する電源制御部を有することを特徴とする請求項4に記載の処置システム。 - 前記処置エネルギが、熱エネルギ、超音波エネルギ、光エネルギ、および、高周波電力エネルギの少なくともいずれかであることを特徴とする請求項1に記載の処置システム。
- 前記処置具は前記電力を熱エネルギに変換する発熱素子を有することを特徴とする請求項1に記載の処置システム。
- 前記温度測定部は前記発熱素子の出力から前記生体組織の温度を算出することを特徴とする請求項8に記載の処置
- 前記温度測定部が温度センサの出力から前記生体組織の温度を測定することを特徴とする請求項1に記載の処置システム。
- 前記生体組織の温度が所定の下限温度以上になってから、前記算出部が前記生体組織の温度の前記時間積分値の算出を開始することを特徴とする請求項1に記載の処置システム。
- 前記比較部は前記所定の設定値と前記生体組織の温度の前記時間積分値との比率を算出し、
前記告知部は前記比率を告知することを特徴とする請求項3に記載の処置システム。 - 前記処置具が前記生体組織に、熱エネルギ、超音波エネルギ、光エネルギ、および、高周波電力エネルギから選択される2以上の前記処置エネルギを順に印加し、
前記電源制御部が、少なくともいずれかの前記処置エネルギの出力の減少または終了を前記指示部の指示に基づいて行うことを特徴とする請求項2に記載の処置システム。 - 生体組織に処置エネルギを印加する処置具と、
前記処置エネルギに変換するための電力を出力する電源と、
前記処置エネルギが印加された前記生体組織の温度を測定するための温度測定部と、
前記温度測定部が測定する前記生体組織の温度と前記処置エネルギの印加時間とから、前記生体組織の温度の時間積分値を算出する算出部と、
前記算出部が算出する温度の時間積分値と所定の設定値とを比較する比較部と、
前記比較部が比較した結果に基づき指示を出す指示部と、
を有することを特徴とする処置具制御装置。 - 電源が、電力を出力するステップと、
処置具が、前記電力を処置エネルギに変換して生体組織に印加するステップと、
温度測定部が、前記処置エネルギが印加された前記生体組織の温度を測定するステップと、
算出部が、前記温度測定部により測定された前記生体組織の温度と前記処置エネルギの印加時間とから前記生体組織の温度の時間積分値を算出するステップと、
比較部が、前記算出部により算出された前記時間積分値と所定の設定値とを比較するステップと、
指示部が、前記比較部が比較した結果に基づき指示を出すステップと、
を動作することを特徴とする処置システムの作動方法。 - さらに、電源制御部が、前記指示に基づき、前記処置エネルギの印加が減少または終了するように前記電源を制御するステップと、
を動作することを特徴とする請求項15に記載の処置システムの作動方法。 - さらに、告知部が、前記指示に基づき、告知を行うステップを動作することを特徴とする請求項15に記載の処置システムの作動方法。
- さらに、設定部が、前記生体組織の温度の前記時間積分値の目標となる所定の設定値を設定するステップを動作することを特徴とする請求項15に記載の処置システムの作動方法。
- さらに、記憶部が、複数の異なる所定の設定値を記憶するステップを動作することを特徴とする請求項18に記載の処置システムの作動方法。
- さらに、前記設定部が、複数の異なる所定の設定値に対応した処置条件を記憶するステップと、
電源制御部が、前記指示部からの指示に基づき選択された前記処置条件に基づき前記処置エネルギの印加が減少または終了するように前記電源を制御するステップと、
を動作することを特徴とする請求項18に記載の処置システムの作動方法。 - 前記処置具が前記電力を前記処置エネルギに変換して生体組織を処置するステップでは、前記電力が熱エネルギ、超音波エネルギ、光エネルギ、および高周波電力エネルギの少なくともいずれかに変換されて処置が行われることを特徴とする請求項15に記載の処置システムの作動方法。
- 前記処置具が前記電力を処置エネルギに変換して前記生体組織を処置するステップでは、発熱素子が電力を熱エネルギに変換することを特徴とする請求項15に記載の処置システムの作動方法。
- 前記温度測定部が温度を測定するステップでは、前記発熱素子の出力から前記生体組織の温度を算出することを特徴とする請求項22に記載の処置システムの作動方法。
- 前記温度測定部が温度を測定するステップでは、温度センサの出力から前記生体組織の温度を測定することを特徴とする請求項15に記載の処置システムの作動方法。
- 前記算出部が前記時間積分値を算出するステップでは、前記生体組織の温度が所定の下限以下になってから、前記生体組織の温度の前記時間積分値の算出を開始することを特徴とする請求項15に記載の処置システムの作動方法。
- 前記比較部が比較するステップでは、前記所定の設定値と前記生体組織の温度の前記時間積分値との比率を算出し、前記告知部が告知を行うステップでは算出された比率を告知することを特徴とする請求項17に記載の処置システムの作動方法。
- 前記処置具が処置するステップでは、前記生体組織に対して熱エネルギ、超音波エネルギ、光エネルギおよび高周波電力エネルギから選択される2つ以上の処置エネルギを順に印加し、
前記電源制御部が前記電源を制御するステップでは、少なくともいずれかの前記処置エネルギの出力の減少または終了が前記指示部の指示に基づいて行われることを特徴とする請求項16に記載の処置システムの作動方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14833046.7A EP3011924A4 (en) | 2013-08-02 | 2014-08-01 | Treatment system, instrument control device, and treatment operation method |
| CN201480043852.7A CN105451677B (zh) | 2013-08-02 | 2014-08-01 | 生物体组织接合系统 |
| JP2015516315A JP5847358B2 (ja) | 2013-08-02 | 2014-08-01 | 生体組織接合システム、および、生体組織接合システムの作動方法 |
| US15/012,537 US10245097B2 (en) | 2013-08-02 | 2016-02-01 | Living tissue bonding system and method for operating living tissue bonding system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361861654P | 2013-08-02 | 2013-08-02 | |
| US61/861,654 | 2013-08-02 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/012,537 Continuation US10245097B2 (en) | 2013-08-02 | 2016-02-01 | Living tissue bonding system and method for operating living tissue bonding system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015016346A1 true WO2015016346A1 (ja) | 2015-02-05 |
Family
ID=52431869
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/070348 WO2015016346A1 (ja) | 2013-08-02 | 2014-08-01 | 処置システム、処置具制御装置、および、処置システムの作動方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10245097B2 (ja) |
| EP (1) | EP3011924A4 (ja) |
| JP (2) | JP5847358B2 (ja) |
| CN (1) | CN105451677B (ja) |
| WO (1) | WO2015016346A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017130384A1 (ja) * | 2016-01-29 | 2017-08-03 | オリンパス株式会社 | 処置具及び処置システム |
| JPWO2016135977A1 (ja) * | 2015-02-27 | 2017-12-21 | オリンパス株式会社 | 医療用処置装置、医療用処置装置の作動方法、及び治療方法 |
| JP2018519919A (ja) * | 2015-06-30 | 2018-07-26 | エシコン エルエルシーEthicon LLC | 組織のパラメータに基づく同時エネルギーモダリティを使用するユーザーが適合可能な技法を有する外科用システム |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018008097A1 (ja) * | 2016-07-05 | 2018-01-11 | オリンパス株式会社 | 医療用処置装置、医療用処置装置の作動方法、及び治療方法 |
| WO2018167877A1 (ja) | 2017-03-15 | 2018-09-20 | オリンパス株式会社 | エネルギー源装置 |
| DE102019121375A1 (de) | 2019-08-07 | 2021-02-25 | Aesculap Ag | Vorrichtung und Verfahren zur Bestimmung eines Abschaltzeitpunktes eines medizinischen Instruments |
| US11723716B2 (en) | 2019-12-30 | 2023-08-15 | Cilag Gmbh International | Electrosurgical instrument with variable control mechanisms |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11949442B2 (en) | 2021-06-09 | 2024-04-02 | Siyata Mobile Inc. | Mobile conversion apparatus for docking cellular data devices |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001514541A (ja) * | 1997-03-05 | 2001-09-11 | ザ トラスティーズ オブ コロンビア ユニバーシティー イン ザ シティー オブ ニューヨーク | 組織をシールおよび結合または切断するための電熱デバイス |
| US20050222556A1 (en) | 2004-03-31 | 2005-10-06 | Terumo Kabushiki Kaisha | Apparatus and method for hyperthermia treatment |
| US20090076506A1 (en) | 2007-09-18 | 2009-03-19 | Surgrx, Inc. | Electrosurgical instrument and method |
| US20090248002A1 (en) | 2008-04-01 | 2009-10-01 | Tomoyuki Takashino | Treatment system, and treatment method for living tissue using energy |
| WO2012071388A2 (en) * | 2010-11-27 | 2012-05-31 | Securus Medical Group, Inc. | Ablation and temperature measurement devices |
| US20130019060A1 (en) | 2011-07-14 | 2013-01-17 | Advanced Micro Devices, Inc. | Creating multiple versions for interior pointers and alignment of an array |
| WO2013088892A1 (ja) * | 2011-12-12 | 2013-06-20 | オリンパスメディカルシステムズ株式会社 | 処置システム及び処置システムの制御方法 |
| WO2013094326A1 (ja) * | 2011-12-22 | 2013-06-27 | 学校法人慶應義塾 | バルーンカテーテル装置及びバルーンカテーテルの加熱方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5553622A (en) * | 1991-01-29 | 1996-09-10 | Mckown; Russell C. | System and method for controlling the temperature of a catheter-mounted heater |
| US6626901B1 (en) | 1997-03-05 | 2003-09-30 | The Trustees Of Columbia University In The City Of New York | Electrothermal instrument for sealing and joining or cutting tissue |
| US7083613B2 (en) | 1997-03-05 | 2006-08-01 | The Trustees Of Columbia University In The City Of New York | Ringed forceps |
| US7008417B2 (en) * | 2002-04-22 | 2006-03-07 | Medtronics, Inc. | Detecting coagulum formation |
| JP4624697B2 (ja) * | 2004-03-12 | 2011-02-02 | オリンパス株式会社 | 手術用処置具 |
| US8216223B2 (en) * | 2006-01-24 | 2012-07-10 | Covidien Ag | System and method for tissue sealing |
| US8685016B2 (en) * | 2006-01-24 | 2014-04-01 | Covidien Ag | System and method for tissue sealing |
| US10682520B2 (en) * | 2012-01-27 | 2020-06-16 | Medtronic, Inc. | Managing recharge power for implantable medical devices |
-
2014
- 2014-08-01 CN CN201480043852.7A patent/CN105451677B/zh active Active
- 2014-08-01 WO PCT/JP2014/070348 patent/WO2015016346A1/ja active Application Filing
- 2014-08-01 JP JP2015516315A patent/JP5847358B2/ja active Active
- 2014-08-01 EP EP14833046.7A patent/EP3011924A4/en not_active Withdrawn
-
2015
- 2015-11-24 JP JP2015228770A patent/JP6537110B2/ja active Active
-
2016
- 2016-02-01 US US15/012,537 patent/US10245097B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001514541A (ja) * | 1997-03-05 | 2001-09-11 | ザ トラスティーズ オブ コロンビア ユニバーシティー イン ザ シティー オブ ニューヨーク | 組織をシールおよび結合または切断するための電熱デバイス |
| US20050222556A1 (en) | 2004-03-31 | 2005-10-06 | Terumo Kabushiki Kaisha | Apparatus and method for hyperthermia treatment |
| US20090076506A1 (en) | 2007-09-18 | 2009-03-19 | Surgrx, Inc. | Electrosurgical instrument and method |
| US20090248002A1 (en) | 2008-04-01 | 2009-10-01 | Tomoyuki Takashino | Treatment system, and treatment method for living tissue using energy |
| WO2012071388A2 (en) * | 2010-11-27 | 2012-05-31 | Securus Medical Group, Inc. | Ablation and temperature measurement devices |
| US20130019060A1 (en) | 2011-07-14 | 2013-01-17 | Advanced Micro Devices, Inc. | Creating multiple versions for interior pointers and alignment of an array |
| WO2013088892A1 (ja) * | 2011-12-12 | 2013-06-20 | オリンパスメディカルシステムズ株式会社 | 処置システム及び処置システムの制御方法 |
| WO2013094326A1 (ja) * | 2011-12-22 | 2013-06-27 | 学校法人慶應義塾 | バルーンカテーテル装置及びバルーンカテーテルの加熱方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3011924A4 * |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2016135977A1 (ja) * | 2015-02-27 | 2017-12-21 | オリンパス株式会社 | 医療用処置装置、医療用処置装置の作動方法、及び治療方法 |
| JP2018519919A (ja) * | 2015-06-30 | 2018-07-26 | エシコン エルエルシーEthicon LLC | 組織のパラメータに基づく同時エネルギーモダリティを使用するユーザーが適合可能な技法を有する外科用システム |
| JP2021065727A (ja) * | 2015-06-30 | 2021-04-30 | エシコン エルエルシーEthicon LLC | 組織のパラメータに基づく同時エネルギーモダリティを使用するユーザーが適合可能な技法を有する外科用システム |
| JP2023054129A (ja) * | 2015-06-30 | 2023-04-13 | エシコン エルエルシー | 組織のパラメータに基づく同時エネルギーモダリティを使用するユーザーが適合可能な技法を有する外科用システム |
| WO2017130384A1 (ja) * | 2016-01-29 | 2017-08-03 | オリンパス株式会社 | 処置具及び処置システム |
| JPWO2017130384A1 (ja) * | 2016-01-29 | 2018-12-13 | オリンパス株式会社 | 処置具及び処置システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015016346A1 (ja) | 2017-03-02 |
| CN105451677A (zh) | 2016-03-30 |
| US20160143684A1 (en) | 2016-05-26 |
| EP3011924A1 (en) | 2016-04-27 |
| JP6537110B2 (ja) | 2019-07-03 |
| JP5847358B2 (ja) | 2016-01-20 |
| EP3011924A4 (en) | 2017-03-22 |
| US10245097B2 (en) | 2019-04-02 |
| JP2016041317A (ja) | 2016-03-31 |
| CN105451677B (zh) | 2018-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5847358B2 (ja) | 生体組織接合システム、および、生体組織接合システムの作動方法 | |
| JP5816774B2 (ja) | 生体組織接合システム、処置具制御装置、および生体組織接合システムの作動方法 | |
| JP5031395B2 (ja) | エネルギーに基づく治療システムおよび方法 | |
| US10687841B2 (en) | Ultrasonic surgical system | |
| JP4567811B2 (ja) | 電気手術装置、電気手術装置の制御方法、高周波処置装置、及び、高周波処置方法 | |
| JP2011530330A (ja) | 階段状の出力で切断及び凝固するための超音波装置 | |
| US10201366B2 (en) | Treatment method | |
| US10265549B2 (en) | Treatment method | |
| US10194932B2 (en) | Treatment method | |
| US20170086875A1 (en) | Treatment method | |
| US20170086874A1 (en) | Treatment method using ultrasonic surgical system | |
| US10166042B2 (en) | Surgical system | |
| JP2012161566A (ja) | 治療用処置装置及びその制御方法 | |
| JP2007159737A (ja) | 発熱処置装置 | |
| US11141215B2 (en) | Energy treatment instrument, treatment system, and controller | |
| JPWO2018008097A1 (ja) | 医療用処置装置、医療用処置装置の作動方法、及び治療方法 | |
| US10034703B2 (en) | Control device for energy treatment tool, and energy treatment system | |
| US10314636B2 (en) | Treatment apparatus and method for controlling the same | |
| US11399859B2 (en) | Energy control device and treatment system | |
| US20170319261A1 (en) | Medical treatment device | |
| WO2017094193A1 (ja) | 熱エネルギ処置装置、及び熱エネルギ処置装置の作動方法 | |
| US20170086916A1 (en) | Treatment method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201480043852.7 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14833046 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015516315 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014833046 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |