WO2013018665A1 - Capteur de courant électrique - Google Patents
Capteur de courant électrique Download PDFInfo
- Publication number
- WO2013018665A1 WO2013018665A1 PCT/JP2012/069041 JP2012069041W WO2013018665A1 WO 2013018665 A1 WO2013018665 A1 WO 2013018665A1 JP 2012069041 W JP2012069041 W JP 2012069041W WO 2013018665 A1 WO2013018665 A1 WO 2013018665A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- pattern
- long
- current sensor
- magnetic
- magnetic field
- Prior art date
Links
Images







Definitions
- the present invention relates to a current sensor that measures current without contact.
- Patent Document 1 proposes a current sensor using a magnetoresistive element (magnetoresistance effect element) as the magnetic sensor element.
- a magnetic balance type current sensor is known as a current sensor using the magnetoresistive effect element as described above.
- a magnetic balance type current sensor detects an induced magnetic field caused by a current to be measured by a magnetic sensor, and generates an induced magnetic field (cancellation magnetic field) in a direction to cancel the induced magnetic field by a coil (feedback coil) based on the output. Then, the current to be measured is calculated from the current flowing through the feedback coil in an equilibrium state where the induced magnetic field due to the current to be measured and the canceling magnetic field due to the feedback coil are balanced.
- This type of current sensor can measure current with high accuracy by its operating principle.
- a large current must be passed through the feedback coil to generate the corresponding canceling magnetic field.
- the power consumption of the current sensor increases.
- the present invention has been made in view of such a point, and an object thereof is to provide a current sensor capable of realizing high current measurement accuracy with low power consumption.
- a current sensor includes a magnetoresistive effect element that detects an induced magnetic field from a current to be measured flowing through a current line, and a feedback coil that generates a magnetic field that cancels the induced magnetic field detected by the magnetoresistive effect element
- the magnetoresistive element includes a meandering magnetic detection pattern formed by connecting a plurality of long patterns extending in a specific direction and arranged in parallel at equal intervals. Each of the feedback coils extends in the extending direction of the long pattern in a region overlapping with the plurality of long patterns when viewed from a direction perpendicular to the plane including the magnetic detection pattern.
- the arrangement pattern of the long pattern is an integral multiple of the arrangement period of the linear wiring pattern. And wherein the door.
- the extending direction of the long pattern constituting the magnetic detection pattern of the magnetoresistive effect element and the extending direction of the linear wiring pattern included in the feedback coil are common, and the arrangement pattern of the long pattern
- the arrangement pattern of the long pattern since it is an integral multiple of the arrangement period of the linear wiring pattern, even if the magnetoresistive element and the feedback coil are arranged close to each other, the canceling magnetic field received by each long pattern of the magnetoresistive element can be made equal. . Thereby, high current measurement accuracy can be realized with low power consumption.
- the linear wiring pattern is arranged in parallel to the long pattern. According to this configuration, since the long pattern in the wiring pattern and the long pattern in the magnetic detection pattern are arranged in parallel, it is possible to further suppress variations in the canceling magnetic field received by each long pattern of the magnetoresistive effect element. .
- the distance between the linear wiring pattern and the long pattern is preferably 1 ⁇ m or less. According to this configuration, since the feedback coil and the magnetoresistive element are sufficiently close to each other, the current flowing through the feedback coil can be sufficiently suppressed. Thereby, high current measurement accuracy can be realized with sufficiently low power consumption.
- the arrangement cycle of the long pattern may be equal to the arrangement cycle of the linear wiring pattern.
- the linear wiring pattern may be arranged immediately above the long pattern.
- the current sensor of the present invention may include a plurality of magnetoresistive elements including the magnetic detection pattern.
- a current sensor capable of realizing high accuracy with low power consumption can be provided.
- FIG. 1 is a schematic diagram showing a configuration example of a magnetic balance type current sensor according to the present embodiment.
- the magnetic balance type current sensor of the present embodiment is arranged in the vicinity of a conductor (current line) 11 through which a current I to be measured flows.
- the magnetic balance type current sensor includes a feedback circuit 12 that generates a canceling magnetic field B that cancels the induced magnetic field A caused by the current I to be measured.
- the feedback circuit 12 includes a feedback coil 121 and four magnetoresistive elements 122a to 122d. Note that FIG. 1 mainly shows connection relationships of the magnetoresistive elements 122a to 122d, and a specific configuration and arrangement will be described in detail in the description of FIG.
- the feedback coil 121 is configured by a spiral planar wiring pattern, and a reverse canceling magnetic field B corresponding to the induced magnetic field A can be generated by passing a current through the wiring pattern.
- the magnetoresistive elements 122a to 122d are GMR (Giant Magneto Resistance) elements, TMR (Tunnel Magneto Resistance) elements, and the like whose resistance value changes when an external magnetic field is applied.
- the magnetoresistive effect elements 122a to 122d are connected in a predetermined relationship, thereby forming a magnetic field detection bridge circuit for detecting a change in an external magnetic field.
- a magnetic balance type current sensor capable of detecting the induced magnetic field A caused by the current I to be measured with high sensitivity can be realized.
- the configuration of the magnetic field detection bridge circuit is not particularly limited.
- the magnetic field detection bridge circuit may include a fixed resistance element that does not change in resistance value due to an external magnetic field.
- a power source that applies a power supply voltage Vdd is connected to a connection point between the magnetoresistive effect element 122b and the magnetoresistive effect element 122c.
- the magnetoresistive effect element 122a and the magnetoresistive effect element 122d are connected to a ground for applying a ground voltage GND.
- the first output voltage Out1 is extracted from the connection point between the magnetoresistive effect element 122a and the magnetoresistive effect element 122b
- the second output voltage Out2 is extracted from the connection point between the magnetoresistive effect element 122c and the magnetoresistive effect element 122d. It is.
- the voltage difference between these two outputs corresponds to the external magnetic field applied to the magnetoresistive effect elements 122a to 122d.
- the voltage difference between the first output voltage Out1 and the second output voltage Out2 is amplified by the amplifier 123 and given to the feedback coil 121 as a current (feedback current). That is, the feedback current has a magnitude corresponding to the voltage difference between the first output voltage Out1 and the second output voltage Out2.
- a cancel magnetic field B is generated around the feedback coil 121 so as to cancel the induced magnetic field A caused by the current I to be measured.
- the current I to be measured is calculated in the detection resistor R that is a detection unit.
- FIG. 2 is a schematic plan view showing a specific configuration of the magnetic balance type current sensor according to the present embodiment.
- magnetoresistive effect elements 122a to 122d including a magnetic detection pattern extending in the horizontal direction (X direction) on the paper surface are arranged in the order of magnetoresistive effect elements 122a, 122b, 122c, and 122d from the left side of the paper surface. ing.
- the direction S hereinafter referred to as the sensitivity axis direction
- the magnetic detection sensitivity is maximum is a direction (Y direction) perpendicular to the extending direction (X direction) of the magnetic detection pattern. ).
- Various terminals are connected to the magnetic detection patterns of the magnetoresistive effect elements 122a to 122d through wirings or the like.
- the magnetoresistive effect element 122a is connected to the ground terminal G1 to which the ground is connected and the first output terminal O1
- the magnetoresistive effect element 122b is connected to the power supply terminal V to which the power is connected and the first output terminal O1.
- the magnetoresistive effect element 122c is connected to the power supply terminal V to which the power supply is connected and the second output terminal O2
- the magnetoresistive effect element 122d is connected to the ground terminal G2 to which the ground is connected and the second output. It is connected to the terminal O2.
- the specific configuration of the magnetoresistive effect elements 122a to 122d, wiring, various terminals (electrodes), etc. is not limited to that shown in FIG.
- a feedback coil 121 having a spiral wiring pattern is formed above the magnetoresistive effect elements 122a to 122d (before the paper surface) with an insulating film or the like interposed therebetween.
- the wiring pattern of the feedback coil 121 includes straight portions 121a and 121c and connecting portions 121b and 121d that connect the two straight portions 121a and 121c.
- the wiring pattern is a straight portion in plan view. 121a is arranged so as to overlap with the lower magnetoresistive effect elements 122a to 122d. In the straight line portion 121a, the wiring pattern is provided so as to extend in the left-right direction (X direction) on the paper surface.
- the extending direction of the magnetic detection pattern of the magnetoresistive effect elements 122a to 122d and the extending direction of the wiring pattern of the linear portion 121a overlapping the magnetoresistive effect elements 122a to 122d are substantially matched.
- the specific configuration of the feedback coil 121 is not limited to that shown in FIG.
- FIG. 3 is an enlarged partial view of the magnetoresistive effect elements 122a to 122d shown in FIG.
- each of the magnetoresistive elements 122a to 122d includes a plurality of long patterns 31 substantially at predetermined intervals in a direction (Y direction) orthogonal to the longitudinal direction (X direction) of the long patterns 31.
- the distance between the center lines of the adjacent long patterns 31 is C1.
- the plurality of long patterns are arranged at the arrangement cycle C1 (repetition cycle).
- FIG. 3 shows a magnetic detection pattern including seven long patterns 31a to 31g, but the number of long patterns 31 is not limited to this.
- the sensitivity axis direction is a direction (Y direction) orthogonal to the longitudinal direction of the long pattern 31.
- the magnetoresistive effect elements 122a to 122d are arranged so that the Y direction of the long pattern 31 coincides with the direction of the induction magnetic field A of the current line 11.
- the magnetoresistive elements 122a to 122d are formed so that the Y direction of the long pattern 31 matches the direction of the canceling magnetic field B of the feedback coil 121.
- each long pattern 31 includes a plurality of magnetic detectors 32 and a plurality of permanent magnets 33.
- the magnetic detectors 32 are arranged at a predetermined interval in the longitudinal direction of the long pattern 31.
- one permanent magnet unit 33 is disposed between two adjacent magnetism detection units 32. That is, the long pattern 31 is configured by alternately connecting the magnetic detection units 32 and the permanent magnet units 33.
- the permanent magnet portion 33 on one end side (the left end portion shown in FIG. 3) of the long pattern 31a provided on the outermost side is connected to the connection terminal 34a. Yes.
- the permanent magnet portion 33 at the other end portion (the right end portion shown in FIG. 3) of the long pattern 31g provided farthest from the long pattern 31a is connected to the connection terminal 34b. It is connected.
- the other end portion of the long pattern 31a and the other end portion of the long pattern 31b adjacent to the long pattern 31a are connected by a permanent magnet portion 33, and one end portion of the long pattern 31b and the long pattern One end of the long pattern 31 c adjacent to 31 b is connected by a permanent magnet portion 33.
- the other end portion of the long pattern 31c and the other end portion of the adjacent long pattern 31d are connected by the permanent magnet portion 33, and one end portion of the long pattern 31d and the adjacent long pattern 31e are connected to each other.
- the one end portion is connected by a permanent magnet portion 33.
- the permanent magnet portions 33 at both ends of the long pattern 31 constitute bent portions that connect the adjacent long patterns 31 to each other except for the permanent magnet portions 33 connected to the connection terminals 34a and 34b.
- the permanent magnet portions 33 provided at both ends of the long pattern 31 are long patterns so that adjacent long patterns 31 can be connected to each other except for the permanent magnet portions 33 connected to the connection terminals 34a and 34b. 31 extends in the arrangement direction.
- the configuration of the meander-shaped magnetic detection pattern is not limited to this. It is sufficient that at least the magnetic detection unit 32 is provided and the magnetic field can be detected.
- a voltage drop occurs in the meander-like magnetic detection pattern according to the electric resistance value.
- the electric resistance value of the meandering magnetic detection pattern is changed by the external magnetic field, the voltage drop in the magnetic detection pattern depends on the induction magnetic field A of the current I to be measured and the canceling magnetic field B of the feedback coil 121. fluctuate.
- One of the connection terminals 34a and 34b of the magnetic detection pattern is connected to one of the output terminals O1 and O2 via a wiring or the like. Therefore, a voltage value corresponding to the voltage drop that occurs in the magnetic detection pattern is obtained as the first output voltage Out1 or the second output voltage Out2.
- FIG. 4 is a schematic cross-sectional view showing a laminated structure of magnetoresistive effect elements 122a to 122d used in the magnetic balance type current sensor according to the present embodiment.
- the AA arrow cross section of FIG. 3 is shown.
- the magnetic detection unit 32 and the permanent magnet unit 33 are provided on an aluminum oxide film 41 formed on a substrate (not shown in FIG. 4) including silicon.
- the aluminum oxide film 41 can be formed by, for example, a sputtering method.
- the magnetic detection units 32 are provided at predetermined intervals so as to be separated from each other, and a permanent magnet unit 33 is provided between the magnetic detection units 32.
- the specific laminated structure of the magnetoresistive effect elements 122a to 122d is not limited to the following description.
- the magnetic detection unit 32 includes a seed layer 42, a first ferromagnetic film 43, an antiparallel coupling film 44, a second ferromagnetic film 45, a nonmagnetic intermediate layer 46, a free magnetic layer 47, and a protective layer 48 in this order. It is comprised by laminating
- the first ferromagnetic film 43 and the second ferromagnetic film 45 are antiferromagnetically coupled via the antiparallel coupling film 44, so-called self-pinning type ferromagnetic fixing.
- a layer (SFP layer: Synthetic Ferri Pinned layer) 49 is configured.
- the magnetoresistive effect elements 122a to 122d are spin valve type elements using the ferromagnetic pinned layer 49, the nonmagnetic intermediate layer 46, and the soft magnetic free layer 47.
- the seed layer 42 is made of Cr, NiFeCr alloy or the like. Note that a base layer made of a nonmagnetic material containing at least one element of Ta, Hf, Nb, Zr, Ti, Mo, and W, for example, is provided between the substrate (not shown) and the seed layer 42. It may be provided.
- the first ferromagnetic film 43 is preferably made of a CoFe alloy containing 40 atomic% to 80 atomic% of Fe. This is because a CoFe alloy having this composition range has a large coercive force and can stably maintain magnetization against an external magnetic field.
- the first ferromagnetic film 43 is provided with induced magnetic anisotropy by applying a magnetic field in the width direction (Y direction, see FIG. 3) of the long pattern 31 during the film formation.
- the direction of the applied magnetic field is, for example, a direction from the back side to the near side.
- the antiparallel coupling film 44 is made of Ru or the like.
- the antiparallel coupling film 44 is desirably formed with a thickness of 0.3 nm to 0.45 nm or 0.75 nm to 0.95 nm. By setting the antiparallel coupling film 44 to such a thickness, strong antiferromagnetic coupling can be provided between the first ferromagnetic film 43 and the second ferromagnetic film 45.
- the second ferromagnetic film 45 is preferably made of a CoFe alloy containing 0 atomic% to 40 atomic% of Fe. This is because the CoFe alloy having this composition range has a small coercive force and is easily magnetized in an antiparallel direction (a direction different by 180 °) with respect to the direction in which the first ferromagnetic film 43 is preferentially magnetized.
- the second ferromagnetic film 45 has a magnetic field similar to that during the film formation of the first ferromagnetic film 43 (the magnetic field in the width direction of the long pattern 31, for example, from the back side to the front side of the drawing). Induced magnetic anisotropy is imparted by applying a magnetic field in a direction toward the magnetic field.
- the first ferromagnetic film 43 is preferentially magnetized in the direction of the applied magnetic field, and the second ferromagnetic film 45 is magnetized by the first ferromagnetic film 43. Magnetizes in an antiparallel direction (a direction different by 180 °) from the direction.
- the nonmagnetic intermediate layer 46 is made of Cu or the like.
- the configuration of the nonmagnetic intermediate layer 46 can be appropriately changed so as to obtain desired characteristics.
- the free magnetic layer 47 is made of a magnetic material such as a CoFe alloy, a NiFe alloy, or a CoFeNi alloy.
- the free magnetic layer 47 is desirably provided with induced magnetic anisotropy by applying a magnetic field in the length direction (X direction, see FIG. 3) of the long pattern 31 during film formation. .
- magnetoresistive elements 122a to 122d that change in resistance linearly with respect to the external magnetic field in the stripe width direction and have small magnetic hysteresis.
- the free magnetic layer 47 due selection of the magnetic material forming the thickness and the free magnetic layer 47 of the free magnetic layer 47, so that the magnetization amount is 0.6memu / cm 2 ⁇ 1.0memu / cm 2 configuration Has been. By doing in this way, the magnetic hysteresis, linearity, and detection sensitivity of the current sensor 1 can be highly balanced.
- the protective layer 48 is made of Ta or the like.
- the configuration of the protective layer 48 can be appropriately changed so as to obtain desired characteristics.
- the magnetization amount (Ms ⁇ t) of the first ferromagnetic film 43 and the magnetization amount (Ms ⁇ t) of the second ferromagnetic film 45 are substantially the same.
- the difference in magnetization between the first ferromagnetic film 43 and the second ferromagnetic film 45 is substantially zero, the effective anisotropic magnetic field of the ferromagnetic fixed layer 49 is increased. Thereby, the magnetization stability of the ferromagnetic pinned layer 49 can be sufficiently secured without using an antiferromagnetic material.
- the Curie temperature (Tc) of the first ferromagnetic film 43 and the Curie temperature (Tc) of the second ferromagnetic film 45 are substantially the same. As a result, even in a high temperature environment, the difference in magnetization (Ms ⁇ t) between the first ferromagnetic film 43 and the second ferromagnetic film 45 becomes substantially zero, and high magnetization stability can be maintained.
- the permanent magnet part 33 is provided in a region where a part of the magnetic detection part 32 provided on the aluminum oxide film 41 is removed by etching or the like.
- the permanent magnet unit 33 includes a base layer 51 provided so as to cover the surface of the aluminum oxide film 41 and the side surface of the magnetic detection unit 32, a hard bias layer 52 provided on the base layer 51, and the hard bias layer 52 And a conductive layer 54 provided on the diffusion prevention layer 53.
- the underlayer 51 is made of Ta, CrTi alloy or the like.
- the underlayer 51 is provided between the hard bias layer 52 and the free magnetic layer 47 of the magnetic detection unit 32, and reduces the bias magnetic field from the hard bias layer 52 to the free magnetic layer 47.
- the hard bias layer 52 and the free magnetic layer 47 are not in contact with each other, so that the magnetization of the free magnetic layer 47 in the magnetization direction is suppressed. Thereby, the dead area of the free magnetic layer 47 can be made sufficiently small, and the magnetic hysteresis can be reduced.
- the hard bias layer 52 is made of a CoPt alloy, a CoCrPt alloy, or the like so that a bias magnetic field can be applied to the free magnetic layer 47 of the magnetic detection unit 32.
- the hard bias layer 52 is provided such that its lower surface is located below the lower surface of the seed layer 42 and its upper surface is located above the upper surface of the protective layer 48. The side area is covered. By doing in this way, it becomes possible to apply a bias magnetic field from a direction substantially orthogonal to the sensitivity axis direction of the free magnetic layer 47, and magnetic hysteresis can be reduced more effectively.
- the diffusion prevention layer 53 is provided so as to cover the hard bias layer 52.
- the diffusion preventing layer 53 is made of Ta or the like.
- the conductive layer 54 is made of Au, Al, Cu, Cr, Ta, or the like.
- the conductive layer 54 is provided so as to cover the diffusion preventing layer 53.
- the conductive layer 54 is provided so as to be in contact with the protective layer 48 of the magnetic detection unit 32 in the longitudinal direction (X direction) of the long pattern 31, and is separated by sandwiching the permanent magnet unit 33.
- the magnetic detection unit 32 is electrically connected.
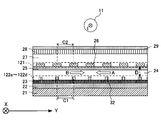
- FIG. 5 is a schematic cross-sectional view showing a laminated structure of a magnetic balance type current sensor including the feedback coil 121 and the magnetoresistive effect elements 122a to 122d.
- FIG. 5 shows a cross section taken along line BB in FIG.
- the laminated structure of the magnetic detection unit 32 is simplified to show the entire laminated structure.
- a thermal silicon oxide film 22 which is an insulating film is formed on a substrate 21 including silicon.
- An aluminum oxide film 23 is formed on the thermal silicon oxide film 22, and the magnetic detectors 32 of the magnetoresistive effect elements 122 a to 122 d are provided on the aluminum oxide film 23.
- the magnetic detection unit 32 is connected to a permanent magnet unit 33 (not shown in FIG. 5) in the depth direction (X direction) of the drawing, and the magnetic detection unit 32 and the permanent magnet unit 33 are alternately connected to each other for a long time.
- a scale pattern 31 (not shown in FIG. 5) is formed.
- a wiring pattern 26 constituting a feedback coil 121 is provided above the long pattern 31 including the magnetic detection unit 32 via a polyimide film 24 and a silicon oxide film 25.
- the polyimide film 24 can be formed by applying and curing a polyimide material, for example.
- the silicon oxide film 25 can be formed by a method such as sputtering or plasma CVD, for example.
- the feedback coil 121 can be formed by patterning using photolithography and etching after forming a film containing a conductive material such as metal, for example.
- the polyimide film 24 and the silicon oxide film 25 are desirably provided with such thicknesses that the distance D between the magnetoresistive effect elements 122a to 122d (particularly, the magnetic detection unit 32) and the feedback coil 121 is within 1 ⁇ m.
- the distance D between the magnetoresistive effect elements 122a to 122d (particularly the magnetic detection unit 32) and the feedback coil 121 is within 1 ⁇ m.
- FIG. 6 is a schematic plan view showing the positional relationship between the wiring pattern 26 of the feedback coil 121 and the long pattern 31 of the magnetoresistive effect elements 122a to 122d in plan view.
- the feedback coil 121 is constituted by a wiring pattern 26 including linear wiring patterns 26a to 26g arranged at substantially equal intervals.
- the linear wiring patterns 26a to 26g constitute a linear portion 121a of the feedback coil 121 (see FIG. 2), and are connected to the curved wiring patterns constituting the curved portions 121b and 121c at the ends thereof. .
- the distance between the center lines of the adjacent linear wiring patterns 26a to 26g is C2.
- the plurality of linear wiring patterns 26a to 26g are arranged at an arrangement period (repetition period) C2.
- the linear wiring patterns 26a to 26g are formed immediately above the long patterns 31a to 31g so as to overlap the long patterns 31a to 31g of the magnetoresistive effect elements 122a to 122d in plan view. That is, the arrangement period C1 of the long patterns 31a to 31g and the arrangement period C2 of the wiring patterns 26a to 26g are substantially equal (C1 ⁇ C2).
- a polyimide film 27 is formed so as to cover the wiring pattern 26.
- a magnetic shield 28 is formed on the polyimide film 27.
- the magnetic shield 28 can be formed using a high magnetic permeability material such as an amorphous magnetic material, a permalloy magnetic material, or an iron microcrystalline material. If desired characteristics can be obtained, the magnetic shield 28 may not be provided.
- a silicon oxide film 29 is formed on the polyimide film 27 and the magnetic shield 28.
- the arrangement period C1 of the long patterns 31a to 31g and the arrangement period C2 of the wiring patterns 26a to 26g are substantially equal.
- the positional relationship between the long patterns 31a to 31g and the corresponding linear wiring patterns 26a to 26g (the linear wiring patterns 26a to 26g closest to the long patterns 31a to 31g) is substantially equal.
- the position (distance, angle, etc.) of the wiring pattern 26a viewed from the long pattern 31a is substantially equal to the position (distance, angle, etc.) of the wiring pattern 26b viewed from the long pattern 31b.
- the position (distance, angle, etc.) of the wiring pattern 26e, the position (distance, angle, etc.) of the wiring pattern 26f viewed from the long pattern 31f, and the position (distance, angle, etc.) of the wiring pattern 26g viewed from the long pattern 31g ) Is substantially equal.
- the long pattern 31a to 31g becomes long regardless of the distance between the magnetoresistive effect elements 122a to 122d and the feedback coil 121.
- the intensity of the canceling magnetic field B received by each of the scale patterns 31a to 31g is substantially equal.
- FIG. 7 is a schematic diagram showing the relationship between the intensity of the canceling magnetic field B of the feedback coil 121 and the arrangement positions of the long patterns 31a to 31g in the magnetic balanced current sensor according to the present embodiment.
- linear wiring patterns 26a to 26g and long patterns 31a to 31g are provided so as to extend in the depth direction (X direction) of the drawing.
- the arrangement period C1 of the long patterns 31a to 31g and the arrangement period C2 of the wiring patterns 26a to 26g are set so that the strengths of the canceling magnetic fields B received by the long patterns 31a to 31g are substantially equal. Are approximately equal.
- the strength of the canceling magnetic field B received by the long patterns 31a to 31g are substantially equal to each other, and a decrease in current measurement accuracy can be suppressed.
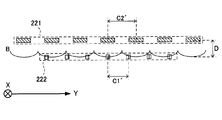
- FIG. 8 is a schematic diagram showing the relationship between the intensity of the canceling magnetic field B and the position of the long pattern when the positional relationship between the long pattern and the corresponding linear wiring pattern is different.
- the long pattern constituting the magnetoresistive effect element 222 is arranged at a predetermined arrangement cycle C1 ′, and the linear wiring pattern constituting the feedback coil 221 is arranged with the arrangement cycle C1 ′ of the long pattern.
- the arrangement cycle C1 ′ of the long pattern are arranged with different arrangement periods C2 ′ (C2 ′ ⁇ C1 ′).
- the intensity of the canceling magnetic field B received by each long pattern of the magnetoresistive effect element 222 is different. For this reason, the current measurement accuracy decreases.
- FIG. 9 is a characteristic diagram showing the relationship between the current flowing through the feedback coil and the effective magnetic field strength received by the magnetoresistive effect element.
- the effective magnetic field received by the magnetoresistive element with respect to the current flowing through the feedback coil becomes weak. This is because the intensity of the canceling magnetic field received by each long pattern of the magnetoresistive effect element is different, and the effective magnetic field received by the magnetoresistive effect element is reduced as the sum of the cancel magnetic fields.
- a large current is measured by reducing the distance between the magnetoresistive element and the feedback coil, if the effective magnetic field received by the magnetoresistive element is weakened, a necessary canceling magnetic field is generated. It is necessary to increase the coil current. For this reason, the power consumption of the magnetic balance type current sensor is increased.
- the cancel magnetic fields received by the long patterns of the magnetoresistive effect elements are substantially equal, and therefore flow through the feedback coil as shown by the line b1 in FIG.
- the effective canceling magnetic field strength received by the magnetoresistive effect element with respect to the current can be effectively increased.
- a magnetic balance type current sensor driven with low power consumption can be realized by bringing the magnetoresistive effect elements 122a to 122d and the feedback coil 121 close to each other as in this embodiment.
- the arrangement period C1 of the long patterns 31a to 31g and the arrangement period C2 of the linear wiring patterns 26a to 26g are not limited to being substantially equal. At least the arrangement period C1 of the long patterns 31a to 31g is substantially an integer multiple of the arrangement period C2 of the linear wiring patterns 26a to 26g (C1 ⁇ n ⁇ C2, where n is an integer (typically a positive integer)). If so, the positional relationship of the wiring patterns 26a to 26g with respect to the long patterns 31a to 31g becomes substantially equal, so that the same effect can be obtained.
- the linear wiring patterns 26a to 26g of the feedback coil 121 are arranged immediately above the long patterns 31a to 31g of the magnetoresistive effect elements 122a to 122d.
- the positional relationship between the wiring patterns 26a to 26g and the long patterns 31a to 31g of the magnetoresistive elements 122a to 122d is not limited to this.
- At least the long patterns 31a to 31g and the wiring patterns 26a to 26g in plan view are satisfied as long as the relationship between the arrangement periods described above is satisfied so that the intensities of the canceling magnetic fields B received by the long patterns 31a to 31g are approximately equal.
- the arrangement position may be shifted. Also in this case, since the canceling magnetic fields B received by the long patterns 31a to 31g can be made substantially equal, it is possible to suppress a decrease in current measurement accuracy.
- the magnetic balanced current sensor according to the present embodiment has the magnetoresistive effect elements 122a to 122d close to the feedback coil 121, so that it is sufficient even when the measured current I is large and the induced magnetic field A is strong. It is possible to generate a strong canceling magnetic field B. Therefore, the magnetic shield 28 that weakens the induced magnetic field A received by the magnetoresistive effect elements 122a to 122d can be omitted.
- the magnetic shield 28 is not provided between the magnetoresistive effect elements 122a to 122d and the conductor 11, the current measurement accuracy is not reduced due to the magnetic hysteresis of the magnetic shield 28. For this reason, current measurement accuracy can be improved by adopting a configuration in which the magnetic shield 28 is not provided between the magnetoresistive effect elements 122a to 122d and the conductor 11.
- the arrangement cycle of the long pattern constituting the meander-like magnetic detection pattern is changed to the arrangement of the linear wiring pattern constituting the feedback coil wiring pattern.
- the intensity of the canceling magnetic field received by each long pattern of the magnetoresistive effect element can be made substantially equal.
- the current measurement accuracy does not deteriorate, so that a magnetic balance type current sensor capable of realizing high accuracy with low power consumption can be realized.
- the present invention is not limited to the above embodiment, and can be implemented with various modifications.
- the distance D between the magnetoresistive effect elements 122a to 122d and the feedback coil 121 is set within 1 ⁇ m so that the magnetoresistive effect elements 122a to 122d and the feedback coil 121 are close to each other. Even when the distance between the magnetoresistive effect element and the feedback coil is not close, this is effective in improving the current measurement accuracy. That is, the distance D between the magnetoresistive elements 122a to 122d and the feedback coil 121 may be greater than 1 ⁇ m.
- the magnetoresistive effect elements 122a to 122d include the long patterns 31a to 31g, but a plurality of magnetoresistive effect elements are formed by the long patterns 31a to 31g. Also good. For example, one magnetoresistive element may be formed by the long patterns 31a to 31c, and another magnetoresistive element may be formed by the long patterns 31d to 31f.
- the film which comprises a current sensor in the said embodiment can be added and abbreviate
- the current sensor of the present invention can be used, for example, to detect the magnitude of a current for driving a motor of an electric vehicle or a hybrid car.
Landscapes
- Measuring Instrument Details And Bridges, And Automatic Balancing Devices (AREA)
Abstract
L'invention concerne un capteur de courant électrique permettant de mesurer un courant électrique avec une grande précision tout en consommant peu d'énergie. Le capteur de courant électrique est doté d'un élément magnéto-résistif (122a-122d), servant à détecter une boucle inductive (A) à partir d'un courant électrique à mesurer (I), et d'une bobine de rétroaction (121) servant à générer un champ magnétique annulant (B), et il est caractérisé en ce que : l'élément magnéto-résistif (122a-122d) présente un motif de détection magnétique à méandres formé en reliant une pluralité de motifs allongés qui s'étendent dans une direction spécifique et qui sont disposés en une rangée à des distances égales; la configuration de la bobine de rétroaction (121) est telle qu'elle comprend une pluralité de motifs de connexion linéaires qui s'étendent individuellement dans la direction d'extension des motifs allongés et qui sont disposés en une rangée à des distances égales, dans une région qui chevauche la pluralité de motifs allongés vue depuis une direction perpendiculaire à un plan comprenant le motif de détection magnétique; et les motifs allongés sont disposés selon une période qui est un multiple entier de la période selon laquelle les motifs de connexion linéaires sont disposés.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011168268 | 2011-08-01 | ||
| JP2011-168268 | 2011-08-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013018665A1 true WO2013018665A1 (fr) | 2013-02-07 |
Family
ID=47629190
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/069041 WO2013018665A1 (fr) | 2011-08-01 | 2012-07-26 | Capteur de courant électrique |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2013018665A1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014148437A1 (fr) * | 2013-03-18 | 2014-09-25 | 日立金属株式会社 | Capteur magnétique |
| CN105431742A (zh) * | 2013-07-24 | 2016-03-23 | 雅马哈株式会社 | 电流检测电路和配备有该电流检测电路的磁检测装置 |
| WO2017169156A1 (fr) * | 2016-03-30 | 2017-10-05 | アルプス電気株式会社 | Dispositif de détection de champ magnétique de type équilibre |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006125962A (ja) * | 2004-10-28 | 2006-05-18 | Tdk Corp | 電流センサ |
| WO2011043193A1 (fr) * | 2009-10-05 | 2011-04-14 | アルプス・グリーンデバイス株式会社 | Capteur de courant à compensation magnétique |
-
2012
- 2012-07-26 WO PCT/JP2012/069041 patent/WO2013018665A1/fr active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006125962A (ja) * | 2004-10-28 | 2006-05-18 | Tdk Corp | 電流センサ |
| WO2011043193A1 (fr) * | 2009-10-05 | 2011-04-14 | アルプス・グリーンデバイス株式会社 | Capteur de courant à compensation magnétique |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014148437A1 (fr) * | 2013-03-18 | 2014-09-25 | 日立金属株式会社 | Capteur magnétique |
| JPWO2014148437A1 (ja) * | 2013-03-18 | 2017-02-16 | 日立金属株式会社 | 磁気センサ |
| US9964602B2 (en) | 2013-03-18 | 2018-05-08 | Hitachi Metals, Ltd. | Magnetic sensor |
| CN105431742A (zh) * | 2013-07-24 | 2016-03-23 | 雅马哈株式会社 | 电流检测电路和配备有该电流检测电路的磁检测装置 |
| US9841440B2 (en) | 2013-07-24 | 2017-12-12 | Yamaha Corporation | Current detection circuit and magnetic detection device provided with same |
| WO2017169156A1 (fr) * | 2016-03-30 | 2017-10-05 | アルプス電気株式会社 | Dispositif de détection de champ magnétique de type équilibre |
| JPWO2017169156A1 (ja) * | 2016-03-30 | 2018-07-05 | アルプス電気株式会社 | 平衡式磁界検知装置 |
| CN108780131A (zh) * | 2016-03-30 | 2018-11-09 | 阿尔卑斯电气株式会社 | 平衡式磁场检测装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6130775B2 (ja) | 電流センサ | |
| JP5572208B2 (ja) | 磁気センサ及びそれを用いた磁気平衡式電流センサ | |
| JP5012939B2 (ja) | 電流センサ | |
| JP5250108B2 (ja) | 磁気平衡式電流センサ | |
| WO2012081377A1 (fr) | Capteur magnétique et son procédé de fabrication | |
| JP2013053903A (ja) | 電流センサ | |
| WO2012090631A1 (fr) | Capteur de courant proportionnel électromagnétique | |
| JPWO2011043193A1 (ja) | 磁気平衡式電流センサ | |
| WO2011111536A1 (fr) | Capteur de courant à balance magnétique | |
| JP5540299B2 (ja) | 電流センサ | |
| JP2018112481A (ja) | 磁気センサ | |
| WO2011111537A1 (fr) | Capteur de courant | |
| JP2013055281A (ja) | 電流センサ | |
| JP2015135267A (ja) | 電流センサ | |
| JP5505817B2 (ja) | 磁気平衡式電流センサ | |
| WO2013018665A1 (fr) | Capteur de courant électrique | |
| JP5540326B2 (ja) | 電流センサ | |
| JP7096349B2 (ja) | 磁気センサおよび電流センサ | |
| JP2013047610A (ja) | 磁気平衡式電流センサ | |
| JP5517315B2 (ja) | 電流センサ | |
| JP2015099882A (ja) | 磁気センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12820570 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 12820570 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |