WO2012169353A1 - 作業車両の周辺監視装置 - Google Patents
作業車両の周辺監視装置 Download PDFInfo
- Publication number
- WO2012169353A1 WO2012169353A1 PCT/JP2012/063136 JP2012063136W WO2012169353A1 WO 2012169353 A1 WO2012169353 A1 WO 2012169353A1 JP 2012063136 W JP2012063136 W JP 2012063136W WO 2012169353 A1 WO2012169353 A1 WO 2012169353A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- work vehicle
- projection plane
- virtual projection
- image
- range
- Prior art date
Links
- 238000012806 monitoring device Methods 0.000 title claims abstract description 30
- 238000003384 imaging method Methods 0.000 claims description 70
- 238000012544 monitoring process Methods 0.000 claims description 14
- 240000004050 Pentaglottis sempervirens Species 0.000 description 32
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 32
- 230000008859 change Effects 0.000 description 24
- 238000006243 chemical reaction Methods 0.000 description 15
- 238000010586 diagram Methods 0.000 description 9
- 238000001514 detection method Methods 0.000 description 7
- 238000000034 method Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 6
- 230000002194 synthesizing effect Effects 0.000 description 4
- 230000015654 memory Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 239000004575 stone Substances 0.000 description 2
- 238000007599 discharging Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000005065 mining Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/27—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view providing all-round vision, e.g. using omnidirectional cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/28—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with an adjustable field of view
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/105—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using multiple cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/303—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing using joined images, e.g. multiple camera images
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/60—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective
- B60R2300/602—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective with an adjustable viewpoint
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/60—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective
- B60R2300/607—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective from a bird's eye viewpoint
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/261—Surveying the work-site to be treated
Definitions
- the present invention relates to a work vehicle periphery monitoring device.
- the periphery monitoring device includes an imaging unit such as a camera mounted on the vehicle.
- the periphery monitoring device creates an overhead image showing the periphery of the work vehicle by synthesizing the images captured by the imaging unit.
- the bird's-eye view image is created by projecting an image captured by the imaging unit onto a virtual projection plane.
- the virtual projection plane has a flat shape, an object that is farther from the vehicle is displayed larger in the overhead view image.
- the virtual projection plane has a shape that gradually rises in the traveling direction of the vehicle. Thereby, it is suppressed that an image spreads and displays toward the advancing direction of a vehicle.
- An object of the present invention is to provide a work vehicle periphery monitoring device that allows an operator to easily recognize the position of a work vehicle when the work vehicle is traveling.
- the work vehicle periphery monitoring device includes an imaging unit, an overhead image creation unit, a display unit, and a traveling state determination unit.
- the imaging unit is attached to the work vehicle and images a region around the work vehicle to obtain image data.
- the overhead image creating unit creates an overhead image around the work vehicle by projecting the image data onto the virtual projection plane.
- the display unit displays an overhead image.
- the traveling state determination unit determines whether the work vehicle is in a traveling state or a stopped state. When the work vehicle is in a stop state, the overhead image creation unit creates an overhead image using the first virtual projection plane. At least the outer edge portion of the first virtual projection plane has a shape in which the height from the ground increases as the distance from the work vehicle increases. When the work vehicle is in a traveling state, the overhead image creation unit creates an overhead image using the second virtual projection plane. At least the outer edge of the second virtual projection plane has a flat shape with a constant height from the ground.
- the work vehicle periphery monitoring device is the work vehicle periphery monitoring device according to the first aspect, and the virtual projection plane includes a first range and a second range.
- the first range is located around the work vehicle.
- the second range is farther from the work vehicle than the first range.
- the first range of the first virtual projection plane is a flat shape having a constant height from the ground.
- the second range of the first virtual projection plane is a shape in which the height from the ground increases as the distance from the work vehicle increases.
- the first range and the second range of the second virtual projection plane are flat shapes having a constant height from the ground.
- a work vehicle periphery monitoring apparatus is the work vehicle periphery monitoring apparatus according to the second aspect, wherein the second range of the first virtual projection plane includes a plurality of curved surfaces, and a plurality of curved surfaces. Including spherical surfaces.
- the plurality of curved surfaces are curved around a virtual axis parallel to each side of the rectangle corresponding to the outer shape of the work vehicle.
- the plurality of spherical surfaces are respectively disposed between a pair of adjacent curved surfaces and are continuously connected to the pair of curved surfaces.
- a work vehicle periphery monitoring apparatus is the work vehicle periphery monitoring apparatus according to the first aspect, wherein the entire second virtual projection plane is flat with a constant height from the ground. Shape.
- a work vehicle periphery monitoring device is the work vehicle periphery monitoring device according to the first aspect, and further includes a vehicle speed detection unit.
- the vehicle speed detection unit detects the vehicle speed of the work vehicle.
- the traveling state determination unit determines that the work vehicle is in a traveling state when the vehicle speed is equal to or higher than a predetermined threshold.
- the traveling state determination unit determines that the work vehicle is in a stopped state when the vehicle speed is smaller than a predetermined threshold.
- a work vehicle includes the periphery monitoring device according to any one of the first to fifth aspects.
- the overhead image creation unit when the work vehicle is in a stopped state, creates an overhead image using the first virtual projection plane. At least the outer edge portion of the first virtual projection plane has a shape in which the height from the ground increases as the distance from the work vehicle increases. Therefore, a phenomenon that an object located farther from the work vehicle is displayed larger in the overhead image can be suppressed. For this reason, the operator can easily grasp the shape and size of the object from the overhead image. Further, when the work vehicle is in the traveling state, the overhead image creation unit creates an overhead image using the second virtual projection plane. At least the outer edge of the second virtual projection plane has a flat shape with a constant height from the ground.
- the first range of the first virtual projection plane has a flat shape with a constant height from the ground.
- the second range of the first virtual projection plane has a shape in which the height from the ground increases as the distance from the work vehicle increases. For this reason, in the first range closer to the work vehicle than the second range, a natural bird's-eye view image can be created as if the ground is imaged from above the work vehicle. Further, in the second range that is farther from the work vehicle than the first range, a phenomenon that an object located farther from the work vehicle is displayed larger in the overhead image can be suppressed.
- the operator can easily grasp the shape and size of the object from the overhead image.
- the first range and the second range of the second virtual projection plane are flat shapes having a constant height from the ground. For this reason, when the work vehicle is in a traveling state, the distortion of the ground at the outer edge of the overhead image is suppressed. Thus, the operator can easily recognize the position of the work vehicle when the work vehicle is traveling.
- the plurality of curved surfaces and the plurality of spherical surfaces are continuously connected on the first virtual projection plane. For this reason, a smooth bird's-eye view image with little discomfort given to the operator is created.
- the entire second virtual projection plane has a flat shape with a constant height from the ground. For this reason, the distortion of the ground in the outer edge part of a bird's-eye view image is suppressed. Thus, the operator can easily recognize the position of the work vehicle when the work vehicle is traveling.
- the traveling state determination unit determines that the work vehicle is in a stopped state when the vehicle speed is smaller than a predetermined threshold value. For this reason, it is determined that the work vehicle is in a stopped state even when the work vehicle is traveling at a low speed. Thus, the operator can easily grasp the shape and size of the object from the overhead view image when the work vehicle is traveling at a low speed.
- the overhead image creation unit when the work vehicle is in a stopped state, creates an overhead image using the first virtual projection plane. At least the outer edge portion of the first virtual projection plane has a shape in which the height from the ground increases as the distance from the work vehicle increases. Therefore, a phenomenon that an object located farther from the work vehicle is displayed larger in the overhead image can be suppressed. For this reason, the operator can easily grasp the shape and size of the object from the overhead image. Further, when the work vehicle is in the traveling state, the overhead image creation unit creates an overhead image using the second virtual projection plane. At least the outer edge of the second virtual projection plane has a flat shape with a constant height from the ground.
- FIG. 1 is a perspective view showing an overall configuration of a work vehicle according to an embodiment of the present invention.
- the block diagram which shows the structure of the periphery monitoring apparatus which concerns on one Embodiment of this invention.
- the perspective view of the work vehicle which shows the mounting position of the some imaging part of a periphery monitoring apparatus.
- the top view which shows the mounting position and imaging range of a some imaging part of a periphery monitoring apparatus.
- the figure which shows the method of the image conversion using a virtual projection surface.
- the schematic diagram which shows an example of a 1st virtual projection surface.
- the schematic diagram which shows an example of a 2nd virtual projection surface.
- FIG. 6 is a top view showing positions of first to close ranges included in a virtual projection plane.
- the flowchart which shows the process which the controller of a periphery monitoring apparatus performs.
- the schematic diagram which shows the example of the bird's-eye view image in a stop state.
- the schematic diagram which shows the example of the bird's-eye view image in a driving
- the schematic diagram which shows an example of the 2nd virtual projection surface which concerns on other embodiment.
- FIG. 1 is a perspective view showing a work vehicle 1 according to an embodiment of the present invention.
- the work vehicle 1 is a self-propelled super large dump truck used for mining work or the like.
- the work vehicle 1 mainly includes a body frame 2, a cab 3, a vessel 4, a front wheel 5, and a rear wheel 6. Moreover, the work vehicle 1 is provided with the periphery monitoring apparatus 10 (refer FIG. 2) which monitors the periphery of the work vehicle 1 and displays the result. Details of the periphery monitoring device 10 will be described later.
- the body frame 2 supports a power mechanism (not shown) such as a diesel engine and a transmission, and other auxiliary machines. Also, left and right front wheels 5 (only the right front wheel is shown in FIG. 1) are supported at the front portion of the body frame 2. Left and right rear wheels 6 (only the right rear wheel is shown in FIG. 1) are supported at the rear portion of the vehicle body frame 2.
- the vehicle body frame 2 includes a lower deck 2a and an upper deck 2b.
- the lower deck 2 a is attached to the lower part of the front surface of the vehicle body frame 2.
- the upper deck 2b is disposed above the lower deck 2a.
- a movable ladder 2c is disposed between the lower deck 2a and the ground.
- An oblique ladder 2d is disposed between the lower deck 2a and the upper deck 2b.
- a rail-like handrail 2e is disposed on the upper deck 2b.
- the cab 3 is disposed on the upper deck 2b.
- the cab 3 is positioned on the upper deck 2b so as to be biased to one side in the vehicle width direction from the center in the vehicle width direction. Specifically, the cab 3 is located on the left side of the center in the vehicle width direction on the upper deck 2b.
- operation members such as a driver's seat, a handle, a shift lever, an accelerator pedal, and a brake pedal are arranged.
- the vessel 4 is a container for loading heavy objects such as crushed stones.
- the rear portion of the bottom surface of the vessel 4 is rotatably connected to the rear portion of the vehicle body frame 2 via a rotation pin (not shown).
- the vessel 4 can take a loading posture and a standing posture by an actuator such as a hydraulic cylinder (not shown).
- the loading posture is a posture in which the front portion of the vessel 4 is positioned above the cab 3 as shown in FIG.
- the standing posture is a posture for discharging the load, and the vessel 4 is tilted backward and downward. By rotating the front part of the vessel 4 upward, the vessel 4 changes from the loading posture to the standing posture.
- FIG. 2 is a block diagram illustrating a configuration of the periphery monitoring device 10 included in the work vehicle 1.
- the periphery monitoring device 10 includes a plurality of imaging units 11-16, a vehicle speed detection unit 17, a display unit 18, and a controller 19.
- the imaging unit 11-16 is attached to the work vehicle 1.
- the imaging unit 11-16 captures an area around the work vehicle 1 and acquires image data.
- the imaging unit 11-16 includes a camera 11a-16a and a frame memory 11b-16b, respectively.
- the frame memory 11b-16b temporarily stores image data picked up by the cameras 11a-16a.
- the plurality of imaging units 11-16 include first to sixth imaging units 11-16.
- FIG. 3 is a perspective view of the work vehicle 1 showing the mounting positions of the first to sixth imaging units 11-16.
- FIG. 4 is a top view of the work vehicle 1 showing the mounting positions and imaging ranges of the first to sixth imaging units 11-16.
- the first imaging unit 11 is attached to the front surface of the work vehicle 1. Specifically, the 1st imaging part 11 is arrange
- the second imaging unit 12 is attached to one side of the front surface of the work vehicle 1. Specifically, the second imaging unit 12 is disposed on the left side of the front surface of the upper deck 2b. As illustrated in FIG. 4, the second imaging unit 12 captures a second area 12 ⁇ / b> R around the work vehicle 1 to obtain second image data.
- the second region 12R is located diagonally to the left of the work vehicle 1.
- the third imaging unit 13 is attached to the other side of the front surface of the work vehicle 1. Specifically, the third imaging unit 13 is disposed in a symmetrical position with the second imaging unit 12. That is, the third imaging unit 13 is disposed on the right side of the front surface of the upper deck 2b. As illustrated in FIG. 4, the third imaging unit 13 captures a third area 13 ⁇ / b> R around the work vehicle 1 to obtain third image data.
- Third region 13 ⁇ / b> R is located obliquely forward and to the right of work vehicle 1.
- the fourth imaging unit 14 is attached to one side surface of the work vehicle 1. Specifically, the fourth imaging unit 14 is disposed in the front part on the left side surface of the upper deck 2b. As shown in FIG. 4, the fourth imaging unit 14 images a fourth region 14 ⁇ / b> R around the work vehicle 1 to obtain fourth image data. The fourth region 14 ⁇ / b> R is located diagonally to the left of the work vehicle 1. As shown in FIG. 3, the fifth imaging unit 15 is attached to the other side surface of the work vehicle 1. Specifically, the fifth imaging unit 15 is arranged at a symmetrical position with respect to the fourth imaging unit 14. That is, the fifth imaging unit 15 is disposed in the front part on the right side surface of the upper deck 2b. As illustrated in FIG. 4, the fifth imaging unit 15 captures a fifth region 15 ⁇ / b> R around the work vehicle 1 to obtain fifth image data. The fifth region 15R is located obliquely rearward to the right of the work vehicle 1.
- the sixth imaging unit 16 is attached to the rear part of the work vehicle 1. Specifically, the sixth imaging unit 16 is disposed above an axle shaft (not shown) that connects the two rear wheels 6 and in the vicinity of the rotation shaft of the vessel 4. As illustrated in FIG. 4, the sixth imaging unit 16 captures a sixth area 16 ⁇ / b> R around the work vehicle 1 to obtain sixth image data.
- the sixth region 16R is located behind the work vehicle 1.
- an image of almost the entire periphery of the work vehicle 1 can be acquired as shown in the central view of FIG.
- two adjacent regions of the first to sixth regions 16R partially overlap each other.
- the first region 11R partially overlaps the second region 12R in the first overlapping region OA1.
- the first region 11R partially overlaps the third region 13R in the second overlapping region OA2.
- the second region 12R partially overlaps the fourth region 14R in the third overlapping region OA3.
- the third region 13R partially overlaps the fifth region 15R in the fourth overlapping region OA4.
- the fourth region 14R partially overlaps the sixth region 16R in the fifth overlapping region OA5.
- the fifth region 15R partially overlaps the sixth region 16R in the sixth overlap region OA6.
- the first to sixth imaging units 11-16 transmit image data indicating the captured images to the controller 19, respectively.
- the vehicle speed detection unit 17 detects the vehicle speed of the work vehicle 1.
- the vehicle speed detector 17 detects the vehicle speed of the work vehicle 1 based on, for example, the rotational speed of the output shaft of the transmission.
- the vehicle speed detection unit 17 transmits vehicle speed data indicating the detected vehicle speed to the controller 19.
- the display unit 18 is a monitor arranged in the cab 3.
- the display unit 18 is disposed in front of the driver's seat in the cab 3.
- the display unit 18 displays an image according to the control of the controller 19.
- the controller 19 creates an overhead image showing the surroundings of the work vehicle 1 based on the image data from the imaging unit 11-16.
- the controller 19 outputs an output signal indicating the created overhead image to the display unit 18.
- the display unit 18 displays an overhead image according to an output signal from the controller 19.
- the controller 19 includes a traveling state determination unit 21, a storage unit 22, and an overhead image creation unit 23.
- the traveling state determination unit 21 determines the traveling state of the work vehicle 1 based on the vehicle speed data from the vehicle speed detection unit 17. The traveling state determination unit 21 determines that the work vehicle 1 is in the traveling state when the vehicle speed is equal to or higher than a predetermined threshold. The traveling state determination unit 21 determines that the work vehicle 1 is in a stopped state when the vehicle speed is smaller than a predetermined threshold value. Accordingly, not only when the vehicle speed is zero, but also a low-speed traveling state where the vehicle speed is low is also included in the stop state.
- the storage unit 22 stores various information necessary for the controller 19 to create an overhead image. Specifically, the storage unit 22 stores first conversion information, second conversion information, and a composition ratio described later.
- the overhead image creation unit 23 receives image data from each of the imaging units 11-16.
- the overhead image creation unit 23 creates an overhead image around the work vehicle 1 based on a plurality of images indicated by a plurality of image data.
- the bird's-eye view image creation unit 23 performs coordinate conversion of image data using conversion information stored in the storage unit 22.
- the conversion information is information indicating the correspondence between the position coordinates of each pixel of the input image and the position coordinates of each pixel of the output image.
- the input image is an image captured by each imaging unit 11-16.
- the output image is a bird's-eye view image displayed on the display unit 18.
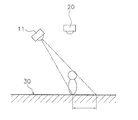
- the overhead image creation unit 23 uses the conversion information to convert the image captured by the imaging unit 11-16 into an image viewed from a predetermined virtual viewpoint located above the work vehicle 1. Specifically, as shown in FIG. 5, an image captured by the imaging unit 11-16 is projected onto a predetermined virtual projection plane 30 so that a virtual viewpoint 20 positioned above the work vehicle 1 is projected. It will be converted to the image you saw. The conversion information represents this virtual projection plane 30.
- the overhead image creation unit 23 creates an overhead image around the work vehicle 1 by projecting and synthesizing the image data from the plurality of imaging units 11-16 onto a predetermined virtual projection plane. That is, the overhead image around the work vehicle 1 is created by projecting and synthesizing the first to sixth image data on a predetermined virtual projection plane.
- the bird's-eye view image creation unit 23 displays the image of the image data from the two imaging units 11-16 adjacent to each other in each overlapping area OA1-OA6 in the overhead view image. Specifically, the overhead image creation unit 23 superimposes the image of the first image data from the first imaging unit 11 and the image of the second image data from the second imaging unit 12 in the first overlapping area OA1. To display. The overhead image creation unit 23 displays the image of the first image data from the first imaging unit 11 and the image of the third image data from the third imaging unit 13 in an overlapping manner in the second overlapping area OA2.
- the overhead image creation unit 23 displays the image of the second image data from the second imaging unit 12 and the image of the fourth image data from the fourth imaging unit 14 in a superimposed manner in the third overlapping area OA3.
- the overhead image creation unit 23 displays the image of the third image data from the third imaging unit 13 and the image of the fifth image data from the fifth imaging unit 15 in an overlapping manner in the fourth overlapping area OA4.
- the overhead image creation unit 23 displays the image of the fourth image data from the fourth imaging unit 14 and the image of the sixth image data from the sixth imaging unit 16 in the fifth overlapping area OA5.
- the overhead image creation unit 23 displays the image of the fifth image data from the fifth imaging unit 15 and the image of the sixth image data from the sixth imaging unit 16 in an overlapping manner in the sixth overlapping area OA6.
- the composition ratio is a value corresponding to each image data, and is stored in the storage unit 22.
- the composition ratio is determined for each image data such that the composition ratio of the first image data is 0.5 and the composition ratio of the second image data is 0.5.
- the overhead image creation unit 23 generates overhead image data indicating the overhead image synthesized as described above, and transmits the overhead image data to the display unit 18.
- the overhead image creation unit 23 creates an overhead image by selectively using a plurality of virtual projection planes. Specifically, the overhead image creation unit 23 creates an overhead image using the first virtual projection plane 31 shown in FIG. 6 and the second virtual projection plane 32 shown in FIG.
- FIG. 6A is a perspective view of the first virtual projection plane 31.
- FIG. 6B is an A1-A1 cross-sectional view of the first virtual projection plane 31 in FIG.
- FIG. 6C is a B1-B1 cross-sectional view of the first virtual projection plane 31 in FIG.
- FIG. 7A is a perspective view of the second virtual projection plane 32.
- FIG. 7B is an A2-A2 cross-sectional view of the second virtual projection plane 32 in FIG.
- the 7C is a B2-B2 cross-sectional view of the second virtual projection plane 32 in FIG.
- the storage unit 22 stores the first conversion information and the second conversion information.
- the first conversion information is data indicating the first virtual projection plane 31.
- the second conversion information is data indicating the second virtual projection plane 32.
- the overhead image creation unit 23 performs coordinate transformation of the image data using the first conversion information, thereby creating an overhead image in which the image captured by each imaging unit 11-16 is projected onto the first virtual projection plane 31.
- the bird's-eye view image creation unit 23 creates a bird's-eye view image obtained by projecting the image captured by each imaging unit 11-16 onto the second virtual projection plane 32 by performing coordinate conversion of the image data using the second conversion information.
- the first virtual projection plane 31 includes a shape whose height from the ground increases as the work vehicle 1 is approached.
- the central portion of the first virtual projection plane 31 has a shape in which the height from the ground increases as the work vehicle 1 is approached.
- the outer edge portion of the first virtual projection plane 31 has a shape in which the height from the ground increases as the distance from the work vehicle 1 increases.
- a range up to a position separated by a predetermined distance on the left side, right side, and rear is defined as a proximity range R0.
- a range adjacent to the proximity range R0 and further away from the work vehicle 1 than the proximity range R0 is defined as a first range R1.
- a range adjacent to the first range R1 and further away from the work vehicle 1 than the first range R1 is defined as a second range R2.
- the second range R2 includes the outer edge portions of the virtual projection planes 31 and 32.
- the first virtual projection plane 31 includes a first change portion 33, a flat portion 34, and a second change portion 35.
- the first change unit 33 is located in the proximity range R0 shown in FIG.
- the height from the ground of the 1st change part 33 becomes so high that it approaches vehicle center C1. That is, the height from the ground of the 1st change part 33 becomes so high that the work vehicle 1 is approached. Therefore, the proximity range R0 of the first virtual projection plane 31 has a shape that increases as the height from the ground approaches the work vehicle 1.
- the 1st change part 33 is the shape which inclined upwards toward the vehicle center C1.
- the vertex of the first change unit 33 is located at a position corresponding to the inside of the work vehicle 1.
- the first changing unit 33 is located below the imaging unit installed at the lowest position among the plurality of imaging units 11-16.
- the flat portion 34 is located in the first range R1 of the first virtual projection plane 31.
- the flat portion 34 is continuously connected to the first change portion 33 at a position farther from the work vehicle 1 than the first change portion 33.
- a connection portion between the first change portion 33 and the flat portion 34 is located on the ground.
- the height of the flat part 34 from the ground is constant. Accordingly, the first range R1 of the first virtual projection plane 31 is a flat shape having a constant height from the ground.
- the flat part 34 is a plane having the same height as the ground. Accordingly, the first range R1 of the first virtual projection plane 31 is a flat shape having the same height as the ground.
- the second change unit 35 is located in the second range R ⁇ b> 2 of the first virtual projection plane 31.
- the second change portion 35 is continuously connected to the flat portion 34 at a position farther from the work vehicle 1 than the flat portion 34.
- the height of the second change unit 35 from the ground increases as the distance from the work vehicle 1 increases.
- the second range R ⁇ b> 2 of the first virtual projection plane 31 has a shape in which the height from the ground increases as the distance from the work vehicle 1 increases.
- Second changing portion 35 has a shape inclined upward in the direction away from work vehicle 1.
- a connection portion between the second change portion 35 and the flat portion 34 is located on the ground.
- the second range R2 of the first virtual projection plane 31, that is, the second changing portion 35 includes a plurality of curved surfaces 35a to 35d and a plurality of spherical surfaces 35e to 35h.
- the curved surfaces 35a to 35d are curved around a virtual axis parallel to each side of the rectangle corresponding to the outer shape of the work vehicle 1.
- the spherical surfaces 35e-35h are disposed between a pair of adjacent curved surfaces 35a-35d, respectively.
- the spherical surfaces 35e-35h are continuously connected to a pair of adjacent curved surfaces 35a-35d.
- the second changing portion 35 includes first to fourth curved surfaces 35a to 35d and first to fourth spherical surfaces 35e to 35h.
- the first curved surface 35 a is located in front of the work vehicle 1. As shown in FIG. 6A, the first curved surface 35a is curved around the virtual axis C2.
- the virtual axis C2 is an axis parallel to the rectangular front side corresponding to the outer shape of the work vehicle 1.
- the second curved surface 35 b is located behind the work vehicle 1. As shown in FIG. 6A, the second curved surface 35b is curved around the virtual axis C3.
- the virtual axis C ⁇ b> 3 is an axis parallel to the side of the rear surface of the rectangle corresponding to the outer shape of the work vehicle 1.
- the third curved surface 35 c is located on the left side of the work vehicle 1. As shown in FIG.
- the third curved surface 35c is curved around the virtual axis C4.
- the virtual axis C4 is an axis parallel to the left side of the rectangle corresponding to the outer shape of the work vehicle 1.
- the fourth curved surface 35 d is located on the right side of the work vehicle 1. As shown in FIG. 6B, the fourth curved surface 35d is curved around the virtual axis C5.
- the virtual axis C5 is an axis parallel to the right side surface of the rectangle corresponding to the outer shape of the work vehicle 1.
- the first spherical surface 35e is disposed between the first curved surface 35a and the third curved surface 35c.
- the first spherical surface 35e is continuously connected to the first curved surface 35a and the third curved surface 35c.
- the second spherical surface 35f is disposed between the first curved surface 35a and the fourth curved surface 35d.
- the second spherical surface 35f is continuously connected to the first curved surface 35a and the fourth curved surface 35d.
- the third spherical surface 35g is disposed between the second curved surface 35b and the third curved surface 35c.
- the third spherical surface 35g is continuously connected to the second curved surface 35b and the third curved surface 35c.
- the fourth spherical surface 35h is disposed between the second curved surface 35b and the fourth curved surface 35d.
- the fourth spherical surface 35h is continuously connected to the second curved surface 35b and the fourth curved surface 35d.
- the second virtual projection plane 32 has a flat shape. Specifically, the whole including the outer edge portion of the second virtual projection plane 32 has a flat shape with a constant height from the ground. Accordingly, the first range R1, the second range R2, and the proximity range R0 of the second virtual projection plane 32 are flat shapes having a constant height from the ground. Specifically, the entire second virtual projection plane 32 has a flat shape located at the same height as the ground.
- FIG. 9 is a flowchart showing processing executed by the controller 19 of the periphery monitoring device 10. Hereinafter, based on FIG. 9, the process for the periphery monitoring apparatus 10 to display an overhead image is demonstrated.
- step S1 image capture is executed.
- images are picked up by the cameras 11a-16a of the image pickup units 11-16, and the image data is stored in the frame memories 11b-16b of the image pickup units 11-16.
- step S2 it is determined whether the work vehicle 1 is in a traveling state.
- the traveling state determination unit 21 determines whether the work vehicle 1 is in a traveling state based on the vehicle speed. As described above, the traveling state determination unit 21 determines that the work vehicle 1 is in the traveling state when the vehicle speed is equal to or higher than the predetermined threshold. The traveling state determination unit 21 determines that the work vehicle 1 is in a stopped state when the vehicle speed is smaller than a predetermined threshold.
- the process proceeds to step S3. That is, when the work vehicle 1 is stopped, the process proceeds to step S3.
- an overhead image is created on the first virtual projection plane 31.
- the overhead image creation unit 23 creates an overhead image using the first virtual projection plane 31 shown in FIG.
- the bird's-eye view image is created by projecting the image data from each imaging unit 11-16 onto the first virtual projection plane 31 and synthesizing the image data.
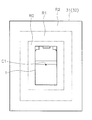
- FIG. 10 is an example of a bird's-eye view image created using the first virtual projection plane 31 (hereinafter referred to as “first bird's-eye view image 41”).
- the outer frame of the first overhead image 41 has a rectangular shape.
- the first bird's-eye view image 41 includes a model diagram 50 showing the work vehicle 1 in a top view and an image 51 around the work vehicle 1 in a top view.
- the first bird's-eye view image 41 includes a plurality of reference lines 52-54 that indicate the distance from the work vehicle 1.
- the reference line 52-54 includes a first reference line 52, a second reference line 53, and a third reference line 54.
- the first reference line 52 indicates a position 10 m away from the work vehicle 1.
- the second reference line 53 indicates a position 15 m away from the work vehicle 1.
- the third reference line 54 indicates a position 20 m away from the work vehicle 1.
- the second range R2 including the outer edge portion of the first virtual projection surface 31 is configured by the curved surfaces 35a to 35d and the spherical surfaces 35e to 35h. For this reason, in the part near the outer frame of the 1st bird's-eye view image 41, the image 51 is curved and displayed.
- step S2 When it is determined in step S2 that the work vehicle 1 is in the traveling state, the process proceeds to step S4. That is, when the vehicle speed is equal to or higher than the predetermined threshold, the process proceeds to step S4.
- step S ⁇ b> 4 an overhead image is created on the second virtual projection plane 32.
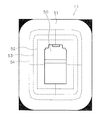
- FIG. 11 is an example of an overhead image created using the second virtual projection plane 32 (hereinafter referred to as “second overhead image 42”). Similar to the first bird's-eye view image 41, the second bird's-eye view image 42 includes a model diagram 50 showing the work vehicle 1 in a top view and an image 51 around the work vehicle 1 in a top view.
- the second bird's-eye view image 42 includes a plurality of reference lines 52-54, like the first bird's-eye view image 41.
- the second virtual projection plane 32 has a generally flat shape. For this reason, in the 2nd bird's-eye view image 42, even if it is a part near an outer frame, like the 1st bird's-eye view image 41, it is prevented that image 51 is curving and displayed.
- step S5 an overhead image is displayed on the display unit 18.
- the first overhead image 41 or the second overhead image 42 described above is displayed on the display unit 18.
- the first overhead image 41 is displayed on the display unit 18.
- the second overhead image 42 is displayed on the display unit 18.
- the overhead image creation unit 23 creates an overhead image using the first virtual projection plane 31 when the work vehicle 1 is in a stopped state.
- the second change portion 35 is disposed in the second range R ⁇ b> 2 including the outer edge portion of the first virtual projection plane 31, the second change portion 35 is disposed.
- the second change portion 35 has a shape in which the height from the ground increases as the distance from the work vehicle 1 increases. For this reason, in the 1st bird's-eye view image 41, the phenomenon displayed more largely is displayed as the object located farther from the work vehicle 1. For this reason, when the work vehicle 1 is in a stopped state, the operator can easily grasp the shape and size of the object from the first overhead image 41.
- the overhead image creation unit 23 creates an overhead image using the second virtual projection plane 32.
- the second virtual projection plane 32 has a flat shape with a constant height from the ground. For this reason, the distortion of the ground in the outer edge part of the 2nd bird's-eye view image 42 is suppressed. Accordingly, the road around the work vehicle 1 is suppressed from being distorted and displayed in the second overhead image 42. Thus, the operator can easily recognize where the work vehicle 1 is running when the work vehicle 1 is running.
- the entire second virtual projection surface 32 has a flat shape with a constant height from the ground. For this reason, the 2nd bird's-eye view image 42 with little distortion is produced. Thus, the operator can easily recognize where the work vehicle 1 is running when the work vehicle 1 is running.
- the traveling state determination unit 21 determines that the work vehicle 1 is in a stopped state when the vehicle speed is smaller than a predetermined threshold value. For this reason, it is determined that the work vehicle 1 is in a stopped state even when the work vehicle 1 is traveling at a low speed. Thus, the operator can easily grasp the shape and size of the object from the first overhead image 41 when the work vehicle 1 is traveling at a low speed.
- a dump truck is cited as an example of the work vehicle 1, but the present invention can also be applied to other types of work vehicles such as a bulldozer.
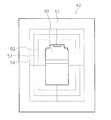
- the second virtual projection plane 32 may have a shape whose height from the ground changes in a region excluding the second range R2.
- you may be comprised by the change part 61 and the flat part 62.
- FIG. The changing part 61 has the same shape as the first changing part 33 in the above embodiment. Therefore, the changing unit 61 has a shape in which the height from the ground increases as the work vehicle 1 is approached.
- the changing unit 61 is located in the proximity range R0.
- the flat portion 62 is farther from the work vehicle 1 than the changing portion 61 and extends to the outer frame of the second virtual projection plane 32. That is, the flat part 62 is located in a range that combines the first range R1 and the second range R2.
- the first range R1 and the second range R2 of the second virtual projection plane 32 are flat shapes with a constant height from the ground. It is not limited to six.
- the arrangement of the imaging units of the present invention is not limited to the arrangement of the imaging units 11-16 of the above-described embodiment.
- the first changing portion 33 of the first virtual projection plane 31 is an inclined surface whose height from the ground continuously changes, but the height of the first changing portion 33 from the ground is a staircase. The shape may change. Similarly, the height from the ground of the second change unit 35 may change stepwise.
- the first changing portion 33 is preferably an inclined surface whose height from the ground changes continuously.
- the second change portion 35 is an inclined surface whose height from the ground changes continuously.
- the inclined surface of the first change portion 33 may be linear or curved.
- the inclined surface of the second change portion 35 may be linear or curved.
- the flat portion 34 of the first virtual projection plane 31 is not limited to the same height as the ground, and may be located at a height different from the ground.
- the work vehicle is determined to be in the traveling state when the vehicle speed is equal to or higher than the predetermined threshold.
- This threshold value is not limited to a value larger than 0, and may be 0. That is, it may be determined that the work vehicle is in a stopped state when the vehicle speed is zero, and may be determined that the work vehicle is in a traveling state when the vehicle speed is greater than zero.
- the traveling state and the stopped state of the work vehicle may be determined based on parameters other than the vehicle speed. For example, even if it is determined that the work vehicle is in a running state when the accelerator operation amount is equal to or greater than a predetermined threshold, and the work vehicle is determined to be in a stopped state when the accelerator operation amount is smaller than a predetermined threshold. Good.
- the present invention can provide a work vehicle periphery monitoring device that allows an operator to easily recognize the position of the work vehicle when the work vehicle is traveling.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Signal Processing (AREA)
- Component Parts Of Construction Machinery (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Processing (AREA)
Abstract
Description
本発明の撮像部の数は上記の実施形態のように6台に限られない。また、本発明の撮像部の配置は上記の実施形態の撮像部11-16の配置に限られない。上記の実施形態では、第1仮想投影面31の第1変化部33は、地面からの高さが連続的に変化する傾斜面であるが、第1変化部33の地面からの高さが階段状に変化してもよい。同様に、第2変化部35の地面からの高さが階段状に変化してもよい。ただし、違和感の少ない自然な俯瞰画像を形成する観点からは、第1変化部33は、地面からの高さが連続的に変化する傾斜面であることが好ましい。同様に、違和感の少ない自然な俯瞰画像を形成する観点からは、第2変化部35は、地面からの高さが連続的に変化する傾斜面であることが好ましい。また、第1変化部33の傾斜面は、直線状であっても、曲線状であってもよい。同様に、第2変化部35の傾斜面は、直線状であっても、曲線状であってもよい。また、第1仮想投影面31の平坦部34は、地面と同じ高さに限らず、地面と異なる高さに位置してもよい。
10 周辺監視装置
11-16 第1~第6撮像部
17 車速検知部
18 表示部
23 俯瞰画像作成部
31 第1仮想投影面
32 第2仮想投影面
R1 第1範囲
R2 第2範囲
Claims (6)
- 作業車両に装着され、前記作業車両の周囲の領域を撮像して画像データを得る撮像部と、
前記画像データを仮想投影面に投影することにより、前記作業車両の周囲の俯瞰画像を作成する俯瞰画像作成部と、
前記俯瞰画像を表示する表示部と、
前記作業車両が走行状態であるのか停止状態であるのかを判定する走行状態判定部と、
を備え、
前記作業車両が停止状態であるときには、前記俯瞰画像作成部は、第1仮想投影面を用いて前記俯瞰画像を作成し、
前記第1仮想投影面の少なくとも外縁部は、前記作業車両から遠ざかるほど地面からの高さが高くなる形状であり、
前記作業車両が走行状態であるときには、前記俯瞰画像作成部は、第2仮想投影面を用いて前記俯瞰画像を作成し、
前記第2仮想投影面の少なくとも外縁部は、地面からの高さが一定の平坦な形状である、
作業車両の周辺監視装置。 - 前記仮想投影面は、前記作業車両の周囲の第1範囲と、前記第1範囲よりも前記作業車両から離れた第2範囲とを含み、
前記第1仮想投影面の前記第1範囲は、地面からの高さが一定の平坦な形状であり、
前記第1仮想投影面の前記第2範囲は、前記作業車両から遠ざかるほど地面からの高さが高くなる形状であり、
前記第2仮想投影面の前記第1範囲及び前記第2範囲は、地面からの高さが一定の平坦な形状である、
請求項1に記載の作業車両の周辺監視装置。 - 前記第1仮想投影面の前記第2範囲は、前記作業車両の外形に対応する矩形の各辺に平行な仮想軸を中心に湾曲した複数の湾曲面と、隣接する一対の前記湾曲面の間にそれぞれ配置されて前記一対の湾曲面と連続的につながった複数の球面とを含む、
請求項2に記載の作業車両の周辺監視装置。 - 前記第2仮想投影面の全体が、地面からの高さが一定の平坦な形状である、
請求項1に記載の作業車両の周辺監視装置。 - 前記作業車両の車速を検知する車速検知部をさらに備え、
前記走行状態判定部は、前記車速が所定の閾値以上であるときに、前記作業車両が走行状態であると判定し、前記車速が前記所定の閾値より小さいときに、前記作業車両が停止状態であると判定する、
請求項1に記載の作業車両の周辺監視装置。 - 請求項1から5のいずれかに記載の周辺監視装置を備える作業車両。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201280003138.6A CN103155552B (zh) | 2011-06-07 | 2012-05-23 | 作业车辆的周边监视装置 |
| AU2012268477A AU2012268477B2 (en) | 2011-06-07 | 2012-05-23 | Surrounding area monitoring device for work vehicle |
| US13/819,137 US8982212B2 (en) | 2011-06-07 | 2012-05-23 | Surrounding area monitoring device for work vehicle |
| CA2805665A CA2805665C (en) | 2011-06-07 | 2012-05-23 | Surrounding area monitoring device for work vehicle |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011-127307 | 2011-06-07 | ||
| JP2011127307A JP5124672B2 (ja) | 2011-06-07 | 2011-06-07 | 作業車両の周辺監視装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012169353A1 true WO2012169353A1 (ja) | 2012-12-13 |
Family
ID=47295921
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/063136 WO2012169353A1 (ja) | 2011-06-07 | 2012-05-23 | 作業車両の周辺監視装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8982212B2 (ja) |
| JP (1) | JP5124672B2 (ja) |
| CN (1) | CN103155552B (ja) |
| AU (1) | AU2012268477B2 (ja) |
| CA (1) | CA2805665C (ja) |
| WO (1) | WO2012169353A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108780564A (zh) * | 2016-03-22 | 2018-11-09 | 株式会社电装 | 图像处理装置、图像处理方法、以及程序 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2712969A4 (en) * | 2011-05-13 | 2015-04-29 | Hitachi Construction Machinery | DEVICE FOR MONITORING THE AREA OF A WORKING MACHINE |
| JP5813439B2 (ja) * | 2011-09-27 | 2015-11-17 | クラリオン株式会社 | 俯瞰画像表示装置 |
| US9598836B2 (en) * | 2012-03-29 | 2017-03-21 | Harnischfeger Technologies, Inc. | Overhead view system for a shovel |
| JP5456123B1 (ja) * | 2012-09-20 | 2014-03-26 | 株式会社小松製作所 | 作業車両用周辺監視システム及び作業車両 |
| JP6302622B2 (ja) * | 2013-03-19 | 2018-03-28 | 住友重機械工業株式会社 | 作業機械用周辺監視装置 |
| US9767561B2 (en) * | 2013-11-18 | 2017-09-19 | Texas Instruments Incorporated | Method and apparatus for a optimal seam for surround view synthesis |
| WO2016038905A1 (ja) | 2015-02-23 | 2016-03-17 | 株式会社小松製作所 | 油圧ショベル |
| DE102015205507B3 (de) * | 2015-03-26 | 2016-09-29 | Zf Friedrichshafen Ag | Rundsichtsystem für ein Fahrzeug |
| WO2016157462A1 (ja) * | 2015-03-31 | 2016-10-06 | 株式会社小松製作所 | 作業機械の周辺監視装置 |
| EP3142066B1 (en) | 2015-09-10 | 2024-06-12 | KNORR-BREMSE Systeme für Nutzfahrzeuge GmbH | Image synthesizer for a surround monitoring system |
| EP3144162B1 (en) | 2015-09-17 | 2018-07-25 | KNORR-BREMSE Systeme für Nutzfahrzeuge GmbH | Apparatus and method for controlling a pressure on at least one tyre of a vehicle |
| DE102015221356B4 (de) | 2015-10-30 | 2020-12-24 | Conti Temic Microelectronic Gmbh | Vorrichtung und Verfahren zur Bereitstellung einer Fahrzeugrundumansicht |
| JP6699370B2 (ja) * | 2016-06-06 | 2020-05-27 | アイシン精機株式会社 | 車両用画像処理装置 |
| JP6607272B2 (ja) * | 2018-03-02 | 2019-11-20 | 株式会社Jvcケンウッド | 車両用記録装置、車両用記録方法及びプログラム |
| US11225777B2 (en) * | 2018-03-14 | 2022-01-18 | Hitachi Construction Machinery Co., Ltd. | Work machine |
| DE102019110871A1 (de) * | 2019-04-26 | 2020-10-29 | Mekra Lang Gmbh & Co. Kg | Sichtsystem für ein Fahrzeug |
| JP7458850B2 (ja) * | 2020-03-26 | 2024-04-01 | 住友重機械建機クレーン株式会社 | 作業機械の周囲表示装置 |
| JP2022155631A (ja) * | 2021-03-31 | 2022-10-14 | 住友重機械建機クレーン株式会社 | 作業機械の周囲監視装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002135765A (ja) * | 1998-07-31 | 2002-05-10 | Matsushita Electric Ind Co Ltd | カメラキャリブレーション指示装置及びカメラキャリブレーション装置 |
| JP2010204821A (ja) * | 2009-03-02 | 2010-09-16 | Hitachi Constr Mach Co Ltd | 周囲監視装置を備えた作業機械 |
| WO2010137265A1 (ja) * | 2009-05-25 | 2010-12-02 | パナソニック株式会社 | 車両周囲監視装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3871614B2 (ja) | 2002-06-12 | 2007-01-24 | 松下電器産業株式会社 | 運転支援装置 |
| CN100456828C (zh) * | 2004-04-27 | 2009-01-28 | 松下电器产业株式会社 | 车辆周围环境显示装置 |
| US7423521B2 (en) * | 2004-12-07 | 2008-09-09 | Kabushiki Kaisha Honda Lock | Vehicular visual assistance system |
| JP4927512B2 (ja) * | 2006-12-05 | 2012-05-09 | 株式会社日立製作所 | 画像生成装置 |
| JP4832321B2 (ja) * | 2007-01-26 | 2011-12-07 | 三洋電機株式会社 | カメラ姿勢推定装置、車両、およびカメラ姿勢推定方法 |
| US8218007B2 (en) * | 2007-09-23 | 2012-07-10 | Volkswagen Ag | Camera system for a vehicle and method for controlling a camera system |
| JP5222597B2 (ja) * | 2008-03-19 | 2013-06-26 | 三洋電機株式会社 | 画像処理装置及び方法、運転支援システム、車両 |
| US8170787B2 (en) * | 2008-04-15 | 2012-05-01 | Caterpillar Inc. | Vehicle collision avoidance system |
| TWI392366B (zh) * | 2009-12-31 | 2013-04-01 | Ind Tech Res Inst | 全周鳥瞰影像距離介面產生方法與系統 |
-
2011
- 2011-06-07 JP JP2011127307A patent/JP5124672B2/ja not_active Expired - Fee Related
-
2012
- 2012-05-23 WO PCT/JP2012/063136 patent/WO2012169353A1/ja active Application Filing
- 2012-05-23 AU AU2012268477A patent/AU2012268477B2/en not_active Ceased
- 2012-05-23 CA CA2805665A patent/CA2805665C/en not_active Expired - Fee Related
- 2012-05-23 CN CN201280003138.6A patent/CN103155552B/zh not_active Expired - Fee Related
- 2012-05-23 US US13/819,137 patent/US8982212B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002135765A (ja) * | 1998-07-31 | 2002-05-10 | Matsushita Electric Ind Co Ltd | カメラキャリブレーション指示装置及びカメラキャリブレーション装置 |
| JP2010204821A (ja) * | 2009-03-02 | 2010-09-16 | Hitachi Constr Mach Co Ltd | 周囲監視装置を備えた作業機械 |
| WO2010137265A1 (ja) * | 2009-05-25 | 2010-12-02 | パナソニック株式会社 | 車両周囲監視装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108780564A (zh) * | 2016-03-22 | 2018-11-09 | 株式会社电装 | 图像处理装置、图像处理方法、以及程序 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8982212B2 (en) | 2015-03-17 |
| JP2012256960A (ja) | 2012-12-27 |
| CA2805665A1 (en) | 2012-12-13 |
| AU2012268477A1 (en) | 2013-02-07 |
| JP5124672B2 (ja) | 2013-01-23 |
| CN103155552A (zh) | 2013-06-12 |
| CA2805665C (en) | 2014-05-06 |
| CN103155552B (zh) | 2015-01-21 |
| AU2012268477B2 (en) | 2014-10-09 |
| US20130162830A1 (en) | 2013-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5124672B2 (ja) | 作業車両の周辺監視装置 | |
| JP5124671B2 (ja) | 作業車両の周辺監視装置 | |
| JP5722127B2 (ja) | 作業車両の周辺監視装置 | |
| JP5938222B2 (ja) | 運搬車両の周囲監視装置 | |
| JP5961659B2 (ja) | 作業車両の周辺監視装置 | |
| JP5643272B2 (ja) | 作業車両用周辺監視システム及び作業車両 | |
| JP5629740B2 (ja) | 作業車両用周辺監視システム及び作業車両 | |
| JP5597596B2 (ja) | 作業車両の周辺監視装置 | |
| JP5781978B2 (ja) | ダンプトラック | |
| JP5990237B2 (ja) | ダンプトラック用周辺監視システム及びダンプトラック | |
| JP5823553B2 (ja) | 作業車両用周辺監視システム及び作業車両 | |
| JP5964353B2 (ja) | ダンプトラック | |
| JP2014222877A (ja) | 作業車両の周辺監視装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201280003138.6 Country of ref document: CN |
|
| ENP | Entry into the national phase |
Ref document number: 2805665 Country of ref document: CA |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12797378 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2012268477 Country of ref document: AU Date of ref document: 20120523 Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13819137 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 12797378 Country of ref document: EP Kind code of ref document: A1 |