WO2012029943A1 - 電子機器及びデータ送信方法 - Google Patents
電子機器及びデータ送信方法 Download PDFInfo
- Publication number
- WO2012029943A1 WO2012029943A1 PCT/JP2011/070025 JP2011070025W WO2012029943A1 WO 2012029943 A1 WO2012029943 A1 WO 2012029943A1 JP 2011070025 W JP2011070025 W JP 2011070025W WO 2012029943 A1 WO2012029943 A1 WO 2012029943A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- data
- electronic device
- unit
- control information
- delay time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0412—Digitisers structurally integrated in a display
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
- G06F3/0488—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/72—Mobile telephones; Cordless telephones, i.e. devices for establishing wireless links to base stations without route selection
- H04M1/724—User interfaces specially adapted for cordless or mobile telephones
- H04M1/72403—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/72—Mobile telephones; Cordless telephones, i.e. devices for establishing wireless links to base stations without route selection
- H04M1/724—User interfaces specially adapted for cordless or mobile telephones
- H04M1/72403—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality
- H04M1/72409—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality by interfacing with external accessories
- H04M1/72412—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality by interfacing with external accessories using two-way short-range wireless interfaces
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/72—Mobile telephones; Cordless telephones, i.e. devices for establishing wireless links to base stations without route selection
- H04M1/724—User interfaces specially adapted for cordless or mobile telephones
- H04M1/72403—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality
- H04M1/7243—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality with interactive means for internal management of messages
- H04M1/72439—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality with interactive means for internal management of messages for image or video messaging
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M2250/00—Details of telephonic subscriber devices
- H04M2250/22—Details of telephonic subscriber devices including a touch pad, a touch sensor or a touch detector
Definitions
- the present invention relates to an electronic device and a data transmission method.
- This application claims priority based on Japanese Patent Application No. 2010-196741 filed on Sep. 2, 2010, the contents of which are incorporated herein by reference.
- Patent Document 1 discloses a digital camera that can wirelessly communicate with other cameras.
- An object of an aspect of the present invention is to provide an electronic device and a data transmission method capable of transmitting an object such as a photograph to another electronic device with a simpler and more intuitive operation.
- One embodiment of the present invention includes a display unit that displays an image that specifies data, a touch panel that is disposed on the display unit and senses contact of an object, and the display unit displays an image that specifies the data.
- a transmission operation detecting unit for detecting that a transmission operation for transmitting the data has been performed when the touch panel senses contact continuously for a predetermined distance or more toward a predetermined direction, and the transmission operation detection
- the electronic device includes a data transmission unit that transmits the data to another electronic device.
- the user can transmit data such as photographs to other electronic devices by a simpler and more intuitive operation.
- FIG. 1 is an external configuration diagram of the display unit 108 provided in the terminal device according to the present embodiment.
- an XY coordinate system is defined with the right direction when viewed from the front as the positive direction of the X axis and the upward direction as the positive direction of the Y axis.
- the angle ⁇ of the terminal device with respect to the horizontal plane (horizontal direction) is defined as the posture angle.
- a touch panel (including a pressure-sensitive type, an electrostatic type, a sound wave type, etc.) 107 is installed on the display unit 108. When touch panel 107 receives pressure from above by a part of a body such as a hand or a finger or an object such as a pen, touch panel 107 receives a touch operation by detecting the position (XY coordinate value).
- FIG. 2 is a block diagram illustrating a configuration of the terminal device 1 according to the present embodiment.
- the terminal device 1 transmits / receives an object which is data such as an image, a moving image, sound or vibration to / from another terminal device 1.
- an object which is data such as an image, a moving image, sound or vibration to / from another terminal device 1.
- electronic devices such as mobile phones, smartphones, and digital cameras.
- the terminal device 1 includes a control unit 101, a ROM (Read Only Memory) 102, a RAM (Random Access Memory) 103, an audio codec 104, a speaker 105, a motion sensor 106, and a touch panel 107.
- ROM Read Only Memory
- RAM Random Access Memory
- the display unit 108 displays an image specifying an object
- the terminal device 1 moves the touch panel 107 area with a finger or the like to stroke the Y-axis positive direction.
- the terminal device 1 generates vibration and sound effects corresponding to the amount of objects held by the terminal device 1.
- a memory card may be used instead of the HDD 113.
- the control unit 101 is a CPU (Central Processing Unit), a transmission operation detection unit 11, a speed detection unit 12, a distance estimation unit 13, a control information generation unit 14, a control information transmission unit 15, and a data transmission unit. 16, a communication establishment unit 17, a control information reception unit 18, a data reception unit 19, a data reception operation setting unit 20, a confirmation operation detection unit 21, and a confirmation operation setting unit 22. And control.
- CPU Central Processing Unit
- the transmission operation detection unit 11 detects that a transmission operation has been performed on the object.
- the transmission operation is an operation in which the user strokes the touch panel 107 area in the positive Y-axis direction with a finger or the like while the display unit 108 displays an image for specifying an object. That is, when the display unit 108 displays an image for specifying an object, the transmission operation detection unit 11 detects the touch continuously for a predetermined distance or more in the positive Y-axis direction (predetermined direction). In this case, it is detected that a transmission operation has been performed on this object.
- the touch panel 107 senses contact in a predetermined direction, and this predetermined direction is the same as the direction in which the other terminal device 1 is located. In addition, it may be detected that a transmission operation has been performed on this object.
- the image that identifies the object is, for example, an image or moving image itself if the object is an image or a moving image, and an icon that identifies sound or vibration if the object is sound or vibration.
- the transmission operation detection unit 11 determines that the transmission operation has been performed when the user performs a stroking operation in the positive direction of the Y axis, but the present invention is not limited to this.
- a negative axis direction, a positive X axis direction, a negative X axis direction, or the like may be used.
- the direction of the terminal device 1 is detected by the motion sensor 106, and the transmission operation detection unit 11 transmits when the user performs an operation of stroking upward (or rightward or leftward) with respect to the ground. It may be determined that an operation has been performed.
- information for specifying the object for example, a file name of a data file
- the speed detection unit 12 detects the speed of the transmission operation for the object (hereinafter referred to as a sending speed) based on the position and time at which the touch panel 107 senses contact.
- the distance estimation unit 13 acquires the radio wave intensity at the time of establishing wireless communication from the communication control unit 112, and according to the acquired radio wave intensity, the distance between the own terminal device 1 and another terminal device 1 (hereinafter referred to as inter-terminal distance and Estimate). Specifically, the distance estimation unit 13 estimates that the terminal-to-terminal distance is within 10 m when the radio wave intensity is strong (predetermined value a or more).
- the distance estimation unit 13 estimates that the distance between terminals is 10 m to 50 m when the radio wave intensity is medium (a predetermined value b ( ⁇ a) or more and less than a). Moreover, the distance estimation part 13 estimates that the distance between terminals is 50 m or more when the field intensity is weak (less than b).
- the control information generation unit 14 generates control information for controlling an operation when another terminal device 1 receives an object.
- the control information generation unit 14 includes a delay time setting unit 14a, a sound effect setting unit 14b, a volume level setting unit 14c, and a vibration level setting unit 14d.
- the delay time setting unit 14a Based on the inter-terminal distance estimated by the distance estimation unit 13 and the attitude angle detected by the motion sensor 106, the delay time setting unit 14a indicates that the other terminal device 1 has received the object after receiving the object. A delay time that is a time until notification to the user of the terminal device 1 is set.
- the sound effect setting unit 14b sets a sound effect to be played when another terminal device 1 receives an object.
- the volume level setting unit 14c sets the reproduction volume of the sound effect to be reproduced when the other terminal device 1 receives the object, based on the sending speed detected by the speed detection unit 12.
- the vibration level setting unit 14d sets the magnitude of vibration generated when the other terminal device 1 receives an object based on the sending speed detected by the speed detection unit 12. Details of the method for setting the delay time, sound effect, reproduction volume and vibration magnitude will be described later.
- the control information includes the delay time set by the delay time setting unit 14a, the identification information of the sound effect set by the sound effect setting unit 14b, the playback volume set by the volume level setting unit 14c, and the vibration level setting. At least one of the magnitudes of vibration set by the portion 14d is included.
- the data receiving unit 19 receives an object from another terminal device 1 via the communication control unit 112.
- the control information receiving unit 18 receives control information from another terminal device 1 via the communication control unit 112.
- the data reception operation setting unit 20 sets an operation for receiving an object based on the control information received by the control information reception unit 18. Specifically, the data reception operation setting unit 20 writes the control information received by the control information receiving unit 18 in the RAM 103. Further, when the data receiving unit 19 receives an object, the data receiving operation setting unit 20 performs a receiving operation set based on the control information. Specifically, the data reception operation setting unit 20 reads control information from the RAM 103 and performs an operation based on the read control information.
- the confirmation operation detection unit 21 detects that a confirmation operation for the object amount has been performed based on the acceleration and angular velocity (attitude angle) detected by the motion sensor 106. Specifically, the confirmation operation detection unit 21 determines that the confirmation operation for the object amount has been performed when the user performs an operation of shaking (shaking) the terminal device 1.
- the confirmation operation setting unit 22 determines the reproduction volume and the vibration amplitude based on the object amount stored in the HDD 113.
- the object amount is the number of objects. The object amount may be used as the object capacity.
- the confirmation operation setting unit 22 outputs predetermined audio data to the audio codec 104 at the determined reproduction volume, and outputs a signal instructing generation of vibration having the determined vibration amplitude to the vibration signal generator 109.
- the ROM 102 is a read-only memory that stores a program for controlling the terminal device 1 and various tables to be described later.
- the RAM 103 is an occasional read / write memory that stores various types of information.
- the audio codec 104 decodes the input audio data, converts the decoded digital audio data into analog, and outputs the analog audio data to the speaker 105.
- the speaker 105 outputs the sound input from the audio codec 104.
- the motion sensor (posture angle detection unit) 106 includes an acceleration sensor and an angular velocity sensor, detects a force acting on the terminal device 1, and detects data (acceleration and posture angle) of the detected force. Output to.
- the touch panel 107 is installed on the display unit 108, detects contact of an object, and outputs a position where the contact is detected to the control unit 101.
- the display unit 108 is a display such as an LCD (Liquid Crystal Display), and displays an image specifying an object.
- the vibration signal generator 109 outputs a prescribed sine wave to the driver unit 110 in accordance with a signal from the control unit 101.
- the driver unit 110 is a motor circuit that drives the vibration motor 111 when a sine wave is input from the vibration signal generator 109.
- the vibration motor (vibration element) 111 is a linear vibration actuator element that vibrates when a sine wave (vibration waveform) having a specified frequency (resonance frequency) is input.
- the communication control unit 112 performs wireless communication with another terminal device 1 via an antenna.
- the communication control unit 112 directly communicates with another terminal device 1 without using an access point by using, for example, WiFi (Wireless Fidelity).
- the HDD 113 is a storage unit that stores objects.
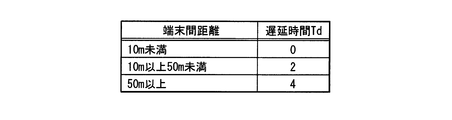
- FIG. 3 is a schematic diagram illustrating a data structure and a data example of a delay time table stored in the ROM 102 according to the present embodiment.
- the delay time table is two-dimensional tabular data composed of rows and columns, and has columns for each item of distance between terminals and delay time Td. Each row in this table exists for each distance.
- the inter-terminal distance is an inter-terminal distance between the terminal device 1 and another terminal device 1.
- the delay time Td is a delay time (in seconds) when another terminal device 1 receives an object.
- the delay time Td corresponding to the inter-terminal distance “less than 10 m” is “0” seconds
- the delay time Td corresponding to the inter-terminal distance “more than 10 m and less than 50 m” is “2” seconds
- the delay time Td corresponding to the distance “50 m or more” is “4” seconds. That is, the smaller the distance between terminals, the shorter the delay time Td, and the longer the distance between terminals, the longer the delay time Td.
- the delay time when the other terminal device 1 receives the object corresponding to the distance between the terminal device 1 and the other terminal device 1 may not be set.
- FIG. 4 is a schematic diagram showing a data structure and a data example of a sound effect table stored in the ROM 102 according to the present embodiment.
- the sound effect table is two-dimensional tabular data composed of rows and columns, and has columns for each item of posture angle and sound effect number. Each row of this table exists for each posture angle.
- the posture angle is the posture angle ⁇ in the terminal device 1 itself.
- the sound effect number is identification information of a sound effect that is reproduced when another terminal device 1 receives an object, and is an integer value of 1 or more and 3 or less.
- the sound effect corresponding to sound effect number 1 is a sound in which an object flies linearly.
- the sound effect corresponding to the sound effect number 2 is a sound in which an object flies with a low parabola.
- the sound effect corresponding to sound effect number 3 is a sound in which an object flies with a high parabola.
- the sound effect number corresponding to the posture angle “less than 30 degrees” is “1”
- the sound effect number corresponding to the posture angle “more than 30 degrees and less than 60 degrees” is “2”
- the posture angle is The sound effect number corresponding to “60 degrees or more” is “3”. Note that the sound effect to be reproduced when the other terminal device 1 receives the object, which corresponds to the attitude angle ⁇ in the own terminal device 1, may not be set.
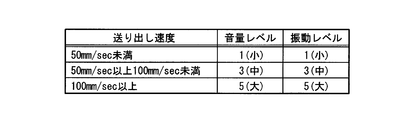
- FIG. 5 is a schematic diagram showing a data structure and a data example of a volume vibration level table stored in the ROM 102 according to the present embodiment.
- the sound volume vibration level table is a two-dimensional tabular data composed of rows and columns, and has columns for each item of delivery speed, sound volume level, and vibration level. Each row of this table exists for each delivery speed.
- the volume level is a reproduction volume of a sound effect that is reproduced when another terminal device 1 receives an object, and is an integer value of 1 to 5.
- the larger the volume level number the larger the reproduction volume, and the smaller the volume level number, the smaller the reproduction volume.
- the vibration level is a magnitude of vibration that occurs when another terminal device 1 receives an object, and is an integer value of 1 or more and 5 or less.
- the larger the vibration level number the larger the vibration (amplitude), and the smaller the vibration level number, the smaller the vibration (amplitude).
- the volume level corresponding to the delivery speed “less than 50 mm / sec” is “1”, and the vibration level is “1”.
- the volume level corresponding to the delivery speed “50 mm / sec or more and less than 100 mm / sec” is “3”, and the vibration level is “3”.
- the volume level corresponding to the delivery speed “100 mm / sec or more” is “5”, and the vibration level is “5”.
- produce corresponding to the sending-out speed in the own terminal device 1 do not need to be set.
- FIG. 6 is a schematic diagram illustrating the data structure and data example of the control information according to the present embodiment.
- the control information includes a delay time, a sound effect number, a volume level, and a vibration level.
- the delay time, the sound effect number, the volume level, and the vibration level are each 1-byte data. That is, the control information is 4 bytes of relatively small data.
- the control information includes a delay time “3”, a sound effect number “2”, a volume level “3”, and a vibration level “3”. Note that the control information does not have to include all of the delay time, the sound effect number, the volume level, and the vibration level, and at least one of the delay time, the sound effect number, the volume level, and the vibration level. May be included. Control information may not be set.
- FIG. 7 is a schematic diagram showing the data structure and data example of the operation pattern table stored in the ROM 102 according to the present embodiment.
- the motion pattern table is two-dimensional tabular data composed of rows and columns, and has columns for each item of the number of objects, reproduction volume, and vibration amplitude. Each row of this table exists for each number of objects.
- the number of objects is the number of objects stored in the HDD 113.
- the reproduction volume is a reproduction volume of a sound effect that is reproduced when a confirmation operation is performed.
- the vibration amplitude is a vibration amplitude of vibration generated when the confirmation operation is performed.
- the reproduction volume corresponding to the number of objects “less than 100” is “maximum volume ⁇ number of objects / 100”, and the vibration amplitude is “rated amplitude ⁇ object / 100”.
- the maximum volume is the maximum volume of the speaker 105
- the rated amplitude is the rated amplitude of the vibration motor 111.
- the reproduction volume corresponding to the number of objects “100 or more” is “specified volume”, and the vibration amplitude is “rated amplitude”.
- the prescribed volume is the prescribed volume of the speaker 105. That is, the smaller the number of objects, the smaller the reproduction volume and vibration, and the larger the number of objects, the larger the reproduction volume and vibration. Note that both the reproduction volume and the vibration amplitude need not be set, and at least one of them may be set. Further, both the reproduction volume and the vibration amplitude need not be set.
- FIG. 8 is an image diagram showing an example of a vibration pattern at the time of the confirmation operation for the object amount according to the present embodiment.
- FIG. 8A is an image diagram of vibration that occurs when the number of objects is small.
- FIG. 8B is an image diagram of vibrations that occur when the number of objects is a standard value.
- FIG. 8C is an image diagram of vibration that occurs when the number of objects is large.
- the vibration amplitude shown in FIG. 8 (a) is smaller than the vibration amplitude shown in FIG. 8 (b), and the vibration amplitude shown in FIG. 8 (b) is smaller than the vibration amplitude shown in FIG. 8 (c).
- the larger the number of objects the larger the vibration amplitude at the confirmation operation, and the smaller the number of objects, the smaller the vibration amplitude at the confirmation operation.
- FIG. 9 is a flowchart showing a procedure of transmission processing in the transmission side terminal 1a according to the present embodiment.
- the touch panel 107 receives an operation input for selecting and determining an object to be transferred (hereinafter referred to as a transfer target object).
- the control unit 101 causes the display unit 108 to display an image for specifying the transfer target object.
- step S ⁇ b> 103 the transmission operation detection unit 11 determines whether a transmission operation has been performed on the touch panel 107 area on the display unit 108. That is, the transmission operation detection unit 11 determines whether or not an operation for stroking in the positive direction of the Y axis has been performed in the touch panel 107 region.
- step S104 the communication establishment unit 17 determines whether communication has been established with the receiving terminal 1b. If communication with the receiving terminal has been established, the process proceeds to step S106. On the other hand, if the communication with the receiving terminal 1b has not been established, in step S105, the communication establishing unit 17 transmits a connection request to the receiving terminal 1b via the communication control unit 112. Establish communication.
- step S106 the control information generation unit 14 generates control information for the receiving terminal 1b. Details of the control information generation method will be described later.
- step S107 the control information transmitting unit 15 transmits the control information generated by the control information generating unit 14 to the receiving terminal 1b.
- step S108 the data transmitting unit 16 transmits the transfer target object to the receiving terminal 1b.
- FIG. 10 is a flowchart showing a procedure of reception processing in the reception side terminal 1b according to the present embodiment.
- the control information receiving unit 18 determines whether data received from the transmitting terminal 1a (hereinafter referred to as reception data) is control information. If the received data is control information, in step S202, the data reception operation setting unit 20 changes the operation setting at the time of object reception based on the received control information, and ends the process. Specifically, the data reception operation setting unit 20 writes the received control information in the RAM 103.
- step S203 the data receiving unit 19 determines whether the received data is an object. If the received data is an object, in step S204, the data reception operation setting unit 20 performs the reception operation changed in step S202. Specifically, the data reception operation setting unit 20 reads control information from the RAM 103 and performs processing based on the read control information.
- the data reception operation setting unit 20 reads out the audio data corresponding to the sound effect number “2” from the HDD 113 and outputs the audio data read out at the reproduction volume corresponding to the volume level “3” to the audio codec 104.
- the data reception operation setting unit 20 outputs a signal instructing generation of vibration having a vibration amplitude corresponding to the vibration level “3” to the vibration signal generator 109. That is, the receiving terminal 1b plays the sound effect corresponding to the sound effect number “2” at the reproduction volume corresponding to the sound volume level “3” and the vibration corresponding to the vibration level “3” when receiving the object. appear. Finally, after the data reception unit 19 waits for a delay time of “3” seconds after the data reception unit 19 receives the object, the data reception operation setting unit 20 displays a message indicating the completion of the reception of the object on the display unit 108, Notify that the object has been received.
- step S205 the control unit 101 executes a process according to the received data.
- FIG. 11 is a flowchart illustrating a procedure of control information generation processing in the transmission side terminal 1a according to the present embodiment.
- the distance estimation unit 13 acquires the radio wave intensity from the communication control unit 112, and estimates the inter-terminal distance according to the acquired radio wave intensity.
- the delay time setting unit 14a determines the delay time Td based on the inter-terminal distance estimated by the distance estimation unit 13. Specifically, the delay time setting unit 14a reads the delay time Td corresponding to the distance between terminals from the delay time table.
- step S303 the delay time setting unit 14a acquires the posture angle ⁇ from the motion sensor 106, and determines an additional delay time Tadd based on the acquired posture angle ⁇ . Specifically, the delay time setting unit 14a calculates the additional delay time Tadd by the following equation (1). That is, the delay time setting unit 14a sets the additional delay time Tadd longer as the posture angle ⁇ is closer to a right angle.
- the delay time setting unit 14a adds the additional delay time Tadd to the delay time Td to obtain a delay time in the control information.
- step S304 the sound effect setting unit 14b acquires the posture angle ⁇ from the motion sensor 106, and determines the sound effect based on the acquired posture angle ⁇ . Specifically, the sound effect number corresponding to the acquired posture angle ⁇ is read from the sound effect table.
- step S305 the speed detector 12 detects the delivery speed.
- the volume level setting unit 14c reads the volume level corresponding to the sending speed detected by the speed detection unit 12 from the volume vibration level table.
- the vibration level setting unit 14d reads the vibration level corresponding to the delivery speed detected by the speed detection unit 12 from the volume vibration level table.
- step S306 the control information generation unit 14 sets the delay time set by the delay time setting unit 14a, the sound effect number set by the sound effect setting unit 14b, and the volume level set by the volume level setting unit 14c. Then, control information that is 4-byte data including the vibration level set by the vibration level setting unit 14d is generated, and the process is terminated.
- the transmitting terminal 1a generates control information for controlling the operation when the receiving terminal 1b receives an object, based on the inter-terminal distance, the attitude angle, and the sending speed.
- FIG. 12 is a flowchart showing the procedure of the confirmation process for the object amount according to this embodiment.
- the confirmation operation detection unit 21 acquires the current movement (acceleration and angular velocity) of the terminal from the motion sensor 106.
- the confirmation operation detection unit 21 determines whether a confirmation operation on the object amount (an operation that shakes the terminal device 1) is performed from the acquired acceleration and angular velocity.
- the confirmation operation setting unit 22 determines the reproduction volume and the vibration amplitude according to the number of objects stored in the HDD 113.
- the confirmation operation setting unit 22 reads the reproduction volume and vibration amplitude corresponding to the number of objects from the operation pattern table.
- the confirmation operation setting unit 22 outputs predetermined audio data to the audio codec 104 at the determined reproduction volume, and outputs a signal instructing generation of vibration having the determined vibration amplitude to the vibration signal generator 109. Output to.
- the speaker 105 outputs sound at the determined reproduction volume, and the vibration motor 111 vibrates at the determined vibration amplitude.
- the confirmation operation has not been performed (No in step S402), the process ends.
- the terminal device 1 when the user shakes the terminal device 1, the terminal device 1 generates sound and vibration according to the number of objects to be held. At this time, the terminal device 1 generates larger sound and vibration as the number of objects to be held increases.
- the terminal device 1 when the user performs an operation of stroking the touch panel 107 area in the Y-axis positive direction while the display unit 108 displays an image for specifying an object.
- the object is transmitted to another terminal device 1.
- an operation of stroking the touch panel 107 area in a predetermined direction that is the same as the direction in which the other terminal device 1 is located the object is transmitted to the other terminal device 1.
- the user can transfer the object by performing an intuitive operation such as flying the top card of the playing cards held in the hand, so that the operation is lost. There is no. That is, the user can transmit the object to another terminal device 1 by a simpler and more intuitive operation.
- the control information is transmitted to the other terminal apparatus 1, and the receiving terminal 1b performs an operation at the time of receiving the object based on the control information.
- the terminal device 1 When the user shakes the terminal device 1, the terminal device 1 generates a volume and vibration corresponding to the amount of object held. Thereby, the user can know the approximate amount of objects held by the terminal device 1 without performing an operation for displaying the amount of objects held by the terminal device 1 from a menu, for example.
- the “computer system” may include an OS and hardware such as peripheral devices. Further, the “computer system” includes a homepage providing environment (or display environment) if a WWW system is used.
- the “computer-readable recording medium” means a flexible disk, a magneto-optical disk, a ROM, a writable nonvolatile memory such as a flash memory, a portable medium such as a CD-ROM, a hard disk built in a computer system, etc. This is a storage device.
- the “computer-readable recording medium” means a volatile memory (for example, DRAM (Dynamic DRAM) in a computer system that becomes a server or a client when a program is transmitted through a network such as the Internet or a communication line such as a telephone line. Random Access Memory)), etc., which hold programs for a certain period of time.
- the program may be transmitted from a computer system storing the program in a storage device or the like to another computer system via a transmission medium or by a transmission wave in the transmission medium.
- the “transmission medium” for transmitting the program refers to a medium having a function of transmitting information, such as a network (communication network) such as the Internet or a communication line (communication line) such as a telephone line.
- the program may be for realizing a part of the functions described above. Furthermore, what can implement
- the distance estimation unit 13 estimates the inter-terminal distance according to the radio wave intensity, but may estimate the inter-terminal distance based on position information by GPS (Global Positioning System). In this case, the distance estimation unit 13 transmits the data requesting the position information to the other terminal device 1 via the communication control unit 112 and acquires the position information of the other terminal device 1.
- GPS Global Positioning System
- the transmission operation detection unit 11 calculates the direction of the other terminal device 1 based on the position information by GPS, and performs an operation to transmit the object when an operation of stroking in the calculated direction is performed. You may determine that it has been broken.
- the delay time setting unit 14a sets the delay time based on the inter-terminal distance and the attitude angle, but may set the delay time based on the sending speed. In this case, the delay time setting unit 14a sets the delay time to be shorter as the delivery speed is higher and to be longer as the delivery speed is slower.
- the terminal device 1 determines the playback volume and the vibration amplitude according to the number of objects during the object amount confirmation operation, but the playback volume and the vibration according to the total capacity of the objects stored in the HDD 113.
- the amplitude may be determined.
- the terminal device 1 may determine the playback volume and the vibration amplitude according to the number or capacity of objects received from the transmission-side terminal 1a.
- the terminal device 1 determines the vibration amplitude according to the object amount during the object amount confirmation operation.
- the terminal device 1 may determine the vibration time according to the object amount.
- FIG. 13 is an image diagram illustrating another example of the vibration pattern during the object amount confirmation operation.
- FIG. 13A is an image diagram of vibration that occurs when the number of objects is small.
- FIG. 13B is an image diagram of vibrations that occur when the number of objects is a standard value.
- FIG. 13C is an image diagram of vibration that occurs when the number of objects is large.
- the vibration time shown in FIG. 13 (a) is shorter than the vibration time shown in FIG. 13 (b), and the vibration time shown in FIG. 13 (b) is shorter than the vibration time shown in FIG. 13 (c). That is, the greater the object amount, the longer the vibration time during the confirmation operation, and the smaller the object amount, the shorter the vibration time during the confirmation operation.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Telephone Function (AREA)
- User Interface Of Digital Computer (AREA)
- Position Input By Displaying (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/775,629 US9170673B2 (en) | 2010-09-02 | 2013-02-25 | Electronic device and method of data transmission |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010-196741 | 2010-09-02 | ||
| JP2010196741A JP5593980B2 (ja) | 2010-09-02 | 2010-09-02 | 電子機器及びデータ送信方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/775,629 Continuation US9170673B2 (en) | 2010-09-02 | 2013-02-25 | Electronic device and method of data transmission |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012029943A1 true WO2012029943A1 (ja) | 2012-03-08 |
Family
ID=45773017
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/070025 Ceased WO2012029943A1 (ja) | 2010-09-02 | 2011-09-02 | 電子機器及びデータ送信方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9170673B2 (https=) |
| JP (1) | JP5593980B2 (https=) |
| WO (1) | WO2012029943A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015003418A1 (zh) * | 2013-07-06 | 2015-01-15 | 深圳市奥尼电子工业有限公司 | 多天线信号智能增强的无线网络摄像头 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6061528B2 (ja) * | 2012-07-23 | 2017-01-18 | キヤノン株式会社 | 操作装置、その制御方法及びプログラム並びに記録媒体 |
| KR102022592B1 (ko) * | 2013-03-04 | 2019-09-19 | 삼성전자주식회사 | 전자 장치에서 전송 정보를 관리하기 위한 방법 및 장치 |
| JP5987780B2 (ja) * | 2013-05-10 | 2016-09-07 | 富士ゼロックス株式会社 | 情報処理装置及び情報処理プログラム |
| JP2015166890A (ja) * | 2014-03-03 | 2015-09-24 | ソニー株式会社 | 情報処理装置、情報処理システム、情報処理方法及びプログラム |
| KR102171389B1 (ko) * | 2014-04-21 | 2020-10-30 | 삼성디스플레이 주식회사 | 영상 표시 시스템 |
| JP2017091319A (ja) * | 2015-11-12 | 2017-05-25 | 株式会社東海理化電機製作所 | 入力装置 |
| JP2019066960A (ja) * | 2017-09-28 | 2019-04-25 | 日本電産株式会社 | 振動システム |
| US12067227B2 (en) * | 2019-07-19 | 2024-08-20 | Boe Technology Group Co., Ltd. | Method and device for pushing media resources with gesture operations |
| CN112822790B (zh) * | 2021-01-08 | 2023-03-21 | 重庆创通联智物联网有限公司 | 数据传输方法、装置、电子设备和计算机可读存储介质 |
| CN116077925A (zh) * | 2023-02-14 | 2023-05-09 | 上海艾为电子技术股份有限公司 | 一种振动反馈方法、装置和电子设备 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05273945A (ja) * | 1992-03-27 | 1993-10-22 | Nec Corp | 情報処理装置 |
| JP2004086723A (ja) * | 2002-08-28 | 2004-03-18 | Sharp Corp | 情報処理システム、情報処理装置、情報処理システムにおける処理方法、および情報処理システムにおける処理プログラム |
| JP2010182046A (ja) * | 2009-02-04 | 2010-08-19 | Sony Corp | 情報処理装置、情報処理方法およびプログラム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4211407B2 (ja) | 2003-01-29 | 2009-01-21 | 株式会社ニコン | デジタルカメラ |
| US8189059B2 (en) | 2003-01-29 | 2012-05-29 | Nikon Corporation | Digital camera and digital camera system |
| US20070282678A1 (en) * | 2006-06-01 | 2007-12-06 | Microsoft Corporation | Platform to enable sharing of location information from a single device to multiple devices in range of communication |
| TWI376109B (en) * | 2008-04-23 | 2012-11-01 | Compal Communications Inc | Wireless access system capable of controlling electronic devices and control method thereof |
| JP5215945B2 (ja) * | 2008-08-12 | 2013-06-19 | 株式会社ソニー・コンピュータエンタテインメント | 画像処理装置 |
| KR101588660B1 (ko) * | 2008-09-30 | 2016-01-28 | 삼성전자주식회사 | 영상 이동이 가능한 디스플레이 장치 및 그 방법 |
| US8547342B2 (en) * | 2008-12-22 | 2013-10-01 | Verizon Patent And Licensing Inc. | Gesture-based delivery from mobile device |
| JP5177071B2 (ja) * | 2009-04-30 | 2013-04-03 | ソニー株式会社 | 送信装置および方法、受信装置および方法、並びに送受信システム |
| US20110291964A1 (en) * | 2010-06-01 | 2011-12-01 | Kno, Inc. | Apparatus and Method for Gesture Control of a Dual Panel Electronic Device |
-
2010
- 2010-09-02 JP JP2010196741A patent/JP5593980B2/ja not_active Expired - Fee Related
-
2011
- 2011-09-02 WO PCT/JP2011/070025 patent/WO2012029943A1/ja not_active Ceased
-
2013
- 2013-02-25 US US13/775,629 patent/US9170673B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05273945A (ja) * | 1992-03-27 | 1993-10-22 | Nec Corp | 情報処理装置 |
| JP2004086723A (ja) * | 2002-08-28 | 2004-03-18 | Sharp Corp | 情報処理システム、情報処理装置、情報処理システムにおける処理方法、および情報処理システムにおける処理プログラム |
| JP2010182046A (ja) * | 2009-02-04 | 2010-08-19 | Sony Corp | 情報処理装置、情報処理方法およびプログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015003418A1 (zh) * | 2013-07-06 | 2015-01-15 | 深圳市奥尼电子工业有限公司 | 多天线信号智能增强的无线网络摄像头 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9170673B2 (en) | 2015-10-27 |
| JP5593980B2 (ja) | 2014-09-24 |
| US20130234956A1 (en) | 2013-09-12 |
| JP2012053748A (ja) | 2012-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5593980B2 (ja) | 電子機器及びデータ送信方法 | |
| KR102092063B1 (ko) | 통신 서비스 수행 방법 및 장치 | |
| CN113874828B (zh) | 用于通过外部电子装置提供屏幕共享服务的电子装置、方法和计算机可读介质 | |
| CN107707817B (zh) | 一种视频拍摄方法及移动终端 | |
| US20110159885A1 (en) | Mobile terminal and method of controlling the operation of the mobile terminal | |
| CN107800821B (zh) | 一种防止马达与震子共振方法及移动终端 | |
| CN108446085A (zh) | 一种投屏显示方法及移动终端 | |
| CN109246123B (zh) | 媒体流获取方法及装置 | |
| CN109302385A (zh) | 多媒体资源分享方法、装置及存储介质 | |
| CN110602389B (zh) | 一种显示方法及电子设备 | |
| CN110740340A (zh) | 视频直播方法及装置、存储介质 | |
| WO2019205735A1 (zh) | 数据传输方法、装置、显示屏及显示装置 | |
| JP2017521899A (ja) | インタラクティブ情報を獲得するための方法、端末、サーバ、およびシステム | |
| WO2018223400A1 (zh) | 一种显示方法及装置 | |
| CN107911735A (zh) | 一种音视频播放处理方法、装置及终端 | |
| CN110166691A (zh) | 一种拍摄方法及终端设备 | |
| CN109618055B (zh) | 一种位置共享方法及移动终端 | |
| CN107678829A (zh) | 一种应用程序控制方法和移动终端 | |
| CN111510757A (zh) | 一种共享媒体数据流的方法、装置以及系统 | |
| CN109451146B (zh) | 一种振动处理方法及终端 | |
| CN110457885A (zh) | 一种操作方法及电子设备 | |
| CN111443815A (zh) | 一种振动提醒方法及电子设备 | |
| WO2019076373A1 (zh) | 拍摄方法、移动终端和计算机可读存储介质 | |
| CN110290263B (zh) | 一种图像显示方法和移动终端 | |
| CN107835495A (zh) | 一种消息提示方法、装置及移动终端 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11821957 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11821957 Country of ref document: EP Kind code of ref document: A1 |