WO2011111292A1 - 信号処理装置及び動画撮像装置 - Google Patents
信号処理装置及び動画撮像装置 Download PDFInfo
- Publication number
- WO2011111292A1 WO2011111292A1 PCT/JP2011/000487 JP2011000487W WO2011111292A1 WO 2011111292 A1 WO2011111292 A1 WO 2011111292A1 JP 2011000487 W JP2011000487 W JP 2011000487W WO 2011111292 A1 WO2011111292 A1 WO 2011111292A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- encoding
- signal processing
- frame
- image
- processing unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images

















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6811—Motion detection based on the image signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/132—Sampling, masking or truncation of coding units, e.g. adaptive resampling, frame skipping, frame interpolation or high-frequency transform coefficient masking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/14—Coding unit complexity, e.g. amount of activity or edge presence estimation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
Definitions
- the present invention relates to a moving image encoding technique, and more particularly to an encoding technique when shooting a moving image having a high resolution and a low bit rate.
- Products used include network cameras, in-vehicle cameras, digital video cameras, and the like.
- the frame rate is lowered according to a simple frame skip algorithm in order to obtain a target bit rate.
- this simple frame skip often gives a noticeable discomfort to visual quality when decoded.
- the frame skip is determined based on the pixel difference between the input frame and the reference frame as described above, there is a possibility that the pixel difference appears greatly even for a small amount of movement. In that case, frame skip determination is not performed even for a frame with small motion, and the amount of code assigned to one frame is small, and the image quality is deteriorated. In particular, the tendency appears remarkably in the case of an input image containing a lot of high frequency components.
- the pixel difference amount is not proportional to the code size after encoding. Therefore, even for a frame with a small code amount, if the pixel difference is large, it is determined as a skip frame, and a visually uncomfortable feeling remains. In particular, the tendency appears remarkably in the case of an input image containing a lot of high frequency components.
- frame skip determination is performed with the same algorithm for any scene, frame skip processing suitable for the scene may not be performed.
- An object of the present invention is to provide a signal processing device and a moving image pickup device capable of dynamically changing a frame skip determination threshold when shooting a moving image having a high resolution and a low bit rate.
- the present invention provides a signal processing device that compresses a plurality of frames of image data and generates a stream, an encoding processing unit that encodes input image data, image movement information, and a threshold value.
- a coding determination processing unit that determines whether to perform encoding by comparing with each other, a frame skip control unit that performs frame skip control when encoding is not performed, and a coding determination process based on the result of the encoding process
- a configuration including a threshold correction unit that corrects the encoding determination threshold of the unit is employed.
- the image movement information used in the encoding determination processing unit includes pixel movement information obtained by the representative point matching method performed in the pixel movement calculation unit, angular velocity sensor information obtainable from the lens control unit, and frequency information obtainable from the image processing unit. Either or a combination thereof can be used.
- the encoding execution determination process is determined based on information conventionally used in the camera (angular velocity sensor information and pixel movement information), the number of processes for acquiring image movement information is small. . Further, since the movement amount is seen instead of the difference information, the motion detection accuracy can be improved.
- the threshold value is corrected based on the encoding result, so that only frames with poor encoding efficiency can be determined to be frame skips. By doing so, it is possible to generate a stream that does not reduce the frame rate as much as possible and has no visual discomfort.
- FIG. 1 It is a block diagram of the moving image imaging device provided with the signal processing device according to the present invention.
- A), (b) and (c) is explanatory drawing of the representative point matching algorithm in the pixel movement calculation part in FIG. It is explanatory drawing of the angular velocity sensor information obtained from the lens control part in FIG.
- (b) is explanatory drawing of the frequency information obtained from the image processing part in FIG. 2 is a flowchart illustrating an example of a frame skip operation in the signal processing device in FIG. 1. It is explanatory drawing of the still image threshold value in the encoding determination process part in FIG. It is explanatory drawing of the moving image threshold value in the encoding determination process part in FIG.
- FIG. 10 is another operation explanatory diagram of the frame skip control unit in FIG. 1.
- the moving image capturing apparatus shown in FIG. 1 is a network camera that records moving images, for example, and generates an image data according to timing and outputs the image data input apparatus 101 and the image data output from the image data input apparatus 101.
- a signal processing device 102 that performs image processing and encoding processing, converts the packet into a network transmission packet, and outputs the packet; a data communication device 103 that transmits the packet output from the signal processing device 102 to the network; And a data storage device 104 for storing the data.
- the image data input device 101 includes an imaging unit 105 that converts video light into an electrical signal, and an imaging device control unit that controls the timing of capturing the electrical signal output from the imaging unit 105 and the irradiation time of the video light onto the imaging device. 106.
- the signal processing apparatus 102 performs predetermined image processing (AE (automatic exposure) processing, WB (white balance) processing, aperture processing, YC processing, etc.) on the video signal read from the imaging unit 105, and luminance signal and color difference
- An image processing unit 107 that converts a signal
- a lens control unit 108 that controls a lens
- a pixel movement calculation unit 109 that calculates a pixel movement amount
- an encoding processing unit 110 that encodes input image data.
- An encoding determination processing unit 111 that determines whether or not encoding is to be performed by the encoding processing unit 110 based on image movement information and a threshold, and a threshold for performing the encoding determination by the encoding determination processing unit 111 is corrected.
- FIG. 2A is a diagram showing the first frame, where a point 201 is a representative point, and information on the one point is held.
- FIG. 2B is a diagram showing the second frame, and a search is made as to where the point determined as the representative point has moved in this frame.
- FIG. 2C is an overlay of the first frame and the second frame, and it can be seen that the representative point 202 defined in the first frame has moved to the point 203. This moved distance is defined as a pixel movement amount. In the present invention, this pixel movement amount is used as one piece of image movement information.
- the angular velocity sensor information is information on the amount of movement of the camera as shown in FIG.
- the angular velocity sensor attached to the sensor portion can represent how much the camera has moved. In the present invention, this angular velocity sensor information is used as one of the image movement information.
- ⁇ Calculate the amount of motion for the acquired angular velocity sensor information.
- the amount of movement differs depending on whether the zoom is performed or not. Even if the angular velocity sensor information is small, the amount of movement increases if the zoom is performed. Therefore, when calculating the amount of movement from the angular velocity sensor information, a value obtained by multiplying the angular velocity sensor information by the zoom magnification is used as the amount of movement. .
- the image processing unit 107 when the input data is processed by the image processing unit 107, frequency information as shown in FIGS. 4A and 4B can be obtained.
- the image processing unit 107 can also acquire frequency information of the entire image, but can also divide the screen into a plurality of pieces and acquire each frequency information.
- the encoding determination processing unit 111 performs encoding determination processing based on the frequency information of the image. For example, the difference between the frequency information of the image data to be encoded and the frequency information of the image to be referred to at the time of encoding is calculated for each region, and if the calculation result is small, it is determined that there is no movement in the frame.
- the skip control unit 113 is notified of non-encoding.
- FIG. 5 shows a still image skip determination processing algorithm that combines pixel movement information and frequency information.
- pixel movement information is acquired from the pixel movement calculation unit 109.
- frequency information of the entire image is acquired from the image processing unit 107.
- a determination is made based on the frequency information acquired from the image processing unit 107. If it is determined that the frequency is low, the pixel movement amount is compared with the still image threshold value in S104 as before, and if it is smaller than the threshold value, it is determined that there is no need for encoding, and the frame skip control unit 113 Frame skip processing S105 is performed. If it is larger than the threshold value, it is determined that encoding is necessary, and the encoding processing unit 110 performs encoding processing in S106.
- the pixel movement information is compared with the threshold value in S107.
- the threshold value is increased to facilitate frame skip determination. By doing so, it is possible to maintain the amount of code allocated per frame. If it is smaller than the threshold value, it is determined that there is no need for encoding, and the frame skip control unit 113 performs frame skip processing S105. If it is larger than the threshold value, it is determined that encoding is necessary, and the encoding processing unit 110 performs encoding processing in S106.
- a scene with small motion is characterized by a small amount of change (difference) between frames. While shooting a video, even if you skip frames with small changes, there is almost no visual discomfort. Therefore, taking advantage of the feature that the amount of change is small, the encoding determination processing unit 111 holds a low threshold for determining a scene with small motion as the still image threshold 303. When the image movement information 301 is below the still image threshold 303 (when entering the area 302), it is determined as a frame skip target frame.
- a scene with intense motion is characterized by a large amount of change (difference) between frames.
- it uses the human visual characteristic that little information is obtained from moving images. While shooting a movie, skipping a frame with intense motion may cause some visual discomfort, but less information can be obtained in one frame than a stationary frame, so the generated stream There is no big impact. Deterioration of image quality without assigning a code amount becomes a fatal problem as a stream. Therefore, taking advantage of the feature that a scene with intense motion has a large amount of change, the encoding determination processing unit 111 holds a high threshold for determining a scene with intense motion as the moving image threshold 403. When the image movement information 401 exceeds the moving image threshold value 403 (when entering the area 402), it is determined as a frame skip target frame.
- the encoding determination processing unit 111 can perform better frame skip control by having both the still image threshold and the moving image threshold.
- the encoding determination processing unit 111 performs encoding determination processing for both the moving image threshold value 501 and the still image threshold value 502. By doing so, it is possible to perform an optimal frame skip process even for a scene change during moving image shooting.
- An area 503 is determined to be a skip target frame.
- the threshold correction unit 112 corrects the threshold according to the recorded scene based on the information of the encoding result.
- the number of intra macroblocks that can be acquired at the time of encoding is acquired from the encoding processing unit 110, and image movement information at the time of encoding is acquired from the encoding determination processing unit 111.
- the threshold correction unit 112 determines that there is no need to correct the moving image threshold because the motion is small, and the threshold is not corrected. If the image movement information is large, it is determined that there is a possibility of a scene with intense motion, and the threshold correction behavior is determined based on the number of intra macroblocks in S203.
- intra macroblocks are generated motion is intense
- threshold correction is performed. Specifically, when it is determined that the number of intra macroblocks is small, it is determined that the scene does not move strongly, and the moving image threshold is increased to make it difficult to determine frame skip (S204). If it is determined that the number of intra macroblocks is large, it is determined that the scene is intensely moving, and the moving image threshold is lowered to facilitate the determination of frame skip (S205).
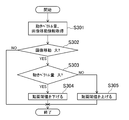
- the motion vector amount that can be acquired at the time of encoding is acquired from the encoding processing unit 110, and the image movement information at the time of encoding is acquired from the encoding determination processing unit 111.
- the threshold correction unit 112 determines that the moving image threshold need not be corrected because the motion is small, and the threshold is not corrected. If the image movement information is large, it is determined that there is a possibility of a scene with intense motion, and the behavior of threshold correction is determined based on the motion vector amount in S303.
- the motion vector amount indicates the amount of movement of the macroblock between the encoded frame and the reference frame
- the motion vector amount is large the motion is intense”. If it is determined that the amount of motion vector is large, it is determined that the scene is intensely moving, and the moving image threshold is lowered in S304 to facilitate the determination of frame skipping. If it is determined that the amount of motion vector is small, it is determined that the scene is not moving strongly, and the moving image threshold is increased in S305 to make it difficult to determine frame skipping.
- the encoding amount that can be acquired at the time of encoding and the QP value are acquired from the encoding processing unit 110, and the image movement information at the time of encoding is acquired from the encoding determination processing unit 111.
- the threshold correction unit 112 determines that there is no need to correct the still image threshold because the movement is large, and the threshold is not corrected. If the image movement information is small, it is determined that there is a possibility of a scene with small motion, and the threshold correction behavior is determined based on the code amount and the QP value in S403, S404, and S406.
- the coding efficiency is good when the code amount is small and the QP value is small, it is determined that coding does not affect the code amount allocation per frame, and threshold correction is performed. Specifically, when it is determined in S403 that the code amount is small, the magnitude of the QP value is determined in S404. If it is determined in S404 that the QP value is small, the frame can be determined as a frame with good encoding efficiency, and the still image threshold is lowered in S405 to make it difficult to determine frame skipping. If it is determined in S404 that the QP value is large, the code amount is small because high compression is being performed and not because coding efficiency is good, and the still image threshold is not corrected.
- the magnitude of the QP value is determined in S406. If it is determined in S406 that the QP value is small, the code amount is large because the compression is low, and the still image threshold value is not corrected. If it is determined in S406 that the QP value is large, it is determined that the frame is a frame with poor compression efficiency, and the still image threshold is increased in S407.
- FIG. 12 shows a simple frame thinning method. When it is determined that encoding is not performed in the frame 601, the frame rate is lowered by discarding the frame 601 without encoding the frame 601.
- the frame 701 is discarded and replaced with a dummy frame 702 instead.
- the dummy frame 702 is a frame composed of only skipped macroblocks, that is, a frame obtained by encoding only information that is the same as the reference source, it is composed of only a very small amount of information. Therefore, even if a dummy frame 702 is inserted instead of the discard frame 701, the influence on the code amount allocated per frame is small.
- the encoding determination processing unit 111 does not perform the encoding determination process for all the frames, but makes a determination in consideration of the picture type at the time of encoding.
- FIG. 15A and FIG. 15B show code amount allocation for streams having the same bit rate and different frame rates.
- the amount of code allocated per frame is smaller than that in FIG. 15B. Therefore, in order to increase the amount of code allocation, the still image threshold is increased and the moving image threshold is decreased. It is necessary to set a threshold value that can be set and skipped more.
- the frame rate is not fixed, and there is a possibility that a sense of incongruity appears visually. In particular, when a frame is skipped too much in a scene where movement is intense, the sense of incongruity appears remarkably. Therefore, as shown in FIG. 16, when a skip determination is made at frame 901, a transition is made to the dummy replacement mode, and frames are skipped from the frame at a constant interval between a plurality of frames. By doing so, the frame rate can be maintained at specific intervals.
- the frame skip rate is fixed, and the frame rate cannot be lowered further. Therefore, multistage threshold values are prepared for each of the moving image threshold value and the still image threshold value.
- the skip processing is performed in the range 1003 so that the upper threshold 1001 has a frame rate of 1/2, and the lower threshold 1002 has a frame rate of 1/4.
- the frame rate is dynamically changed at specific intervals by changing the skip rate according to the value of the image movement information.
- the encoding determination process by using the information of the above encoding result as the image movement information.
- the encoding result is used as the image movement information of the next frame and skipped. Judgment processing is performed. However, since there is a time lag of one frame between the information on the coding determination and the frame on which the determination is made, the accuracy of the coding determination process is reduced.
- the signal processing apparatus and the moving image capturing apparatus perform encoding determination based on representative point matching information and angular velocity sensor information before encoding, and dynamically determine an encoding determination threshold based on the encoding result. To change. By doing so, it is possible to perform frame skip determination processing suitable for each scene, the amount of code per frame can be increased, and encoding can be performed without a sense of incongruity visually and in image quality. Therefore, it is useful as a signal processing device and a moving image capturing device.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
- Studio Devices (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201180012475.7A CN102783153B (zh) | 2010-03-09 | 2011-01-28 | 信号处理装置以及动态图像拍摄装置 |
| US13/604,175 US9854167B2 (en) | 2010-03-09 | 2012-09-05 | Signal processing device and moving image capturing device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010-051562 | 2010-03-09 | ||
| JP2010051562A JP5583992B2 (ja) | 2010-03-09 | 2010-03-09 | 信号処理装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/604,175 Continuation US9854167B2 (en) | 2010-03-09 | 2012-09-05 | Signal processing device and moving image capturing device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2011111292A1 true WO2011111292A1 (ja) | 2011-09-15 |
Family
ID=44563130
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/000487 Ceased WO2011111292A1 (ja) | 2010-03-09 | 2011-01-28 | 信号処理装置及び動画撮像装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9854167B2 (https=) |
| JP (1) | JP5583992B2 (https=) |
| CN (1) | CN102783153B (https=) |
| WO (1) | WO2011111292A1 (https=) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013169785A1 (en) * | 2012-05-11 | 2013-11-14 | Qualcomm Incorporated | Motion sensor assisted rate control for video encoding |
| JP2015119335A (ja) * | 2013-12-18 | 2015-06-25 | Kddi株式会社 | 動き変化量に応じて撮影動画像のフレームを間引く端末、システム、プログラム及び方法 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103313091A (zh) * | 2012-09-27 | 2013-09-18 | 中兴通讯股份有限公司 | 倍速播放方法、装置及系统 |
| JP2014200074A (ja) * | 2013-03-15 | 2014-10-23 | 株式会社リコー | 配信制御システム、配信制御方法、及びプログラム |
| GB2516007B (en) | 2013-06-28 | 2018-05-09 | Displaylink Uk Ltd | Efficient encoding of display data |
| US9615131B2 (en) * | 2013-08-08 | 2017-04-04 | Honeywell International Inc. | System and method of motion detection on encrypted or scrambled video data streams |
| CN104144345B (zh) * | 2013-09-18 | 2016-08-17 | 腾讯科技(深圳)有限公司 | 在移动终端进行实时图像识别的方法及该移动终端 |
| JP2015220741A (ja) * | 2014-05-21 | 2015-12-07 | 株式会社リコー | 配信制御システム、配信制御方法、及びプログラム |
| US9269328B2 (en) * | 2014-06-24 | 2016-02-23 | Google Inc. | Efficient frame rendering |
| CN105323466B (zh) * | 2015-06-25 | 2019-01-29 | 维沃移动通信有限公司 | 一种基于场景的拍摄方法及终端 |
| JP7197785B2 (ja) * | 2019-01-28 | 2022-12-28 | 日本電信電話株式会社 | 映像処理装置、映像処理方法、及び映像処理プログラム |
| JP7175941B2 (ja) * | 2020-07-29 | 2022-11-21 | キヤノン株式会社 | 画像処理装置、画像処理装置の制御方法、プログラム |
| CN112254660B (zh) * | 2020-09-14 | 2022-04-22 | 中铁七局集团有限公司 | 隧道智能监控量测信息集成与预警系统 |
| CN116600138A (zh) * | 2023-05-06 | 2023-08-15 | 平安科技(深圳)有限公司 | 基于解码信息进行视频图像处理的方法及其相关设备 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1066071A (ja) * | 1996-08-20 | 1998-03-06 | Fujitsu General Ltd | 映像データ送信装置 |
| JP2000350211A (ja) * | 1999-06-07 | 2000-12-15 | Toshiba Corp | 動画像符号化方法及び動画像符号化装置 |
| JP2001036908A (ja) * | 1999-07-15 | 2001-02-09 | Oki Electric Ind Co Ltd | 動画像圧縮装置 |
| JP2001245303A (ja) * | 2000-02-29 | 2001-09-07 | Toshiba Corp | 動画像符号化装置および動画像符号化方法 |
| JP2008035281A (ja) * | 2006-07-28 | 2008-02-14 | Sanyo Electric Co Ltd | 画像符号化方法 |
| JP2008532430A (ja) * | 2005-03-01 | 2008-08-14 | クゥアルコム・インコーポレイテッド | レート制御されたビデオ符号化のための適応フレーム・スキップ技術 |
| JP2008236789A (ja) * | 2001-03-05 | 2008-10-02 | Intervideo Inc | 符号化プロセスの実行中にスキップするビデオシーケンスフレームを選択する方法 |
| JP2009201103A (ja) * | 2008-01-22 | 2009-09-03 | Panasonic Corp | 映像信号処理装置 |
| JP2010199656A (ja) * | 2009-02-23 | 2010-09-09 | Panasonic Corp | 動画撮像装置 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2514114B2 (ja) * | 1991-01-31 | 1996-07-10 | 株式会社グラフィックス・コミュニケーション・テクノロジーズ | 動画像符号化装置 |
| US5453787A (en) * | 1993-12-10 | 1995-09-26 | International Business Machines Corporation | Variable spatial frequency chrominance encoding in software motion video compression |
| US5635982A (en) * | 1994-06-27 | 1997-06-03 | Zhang; Hong J. | System for automatic video segmentation and key frame extraction for video sequences having both sharp and gradual transitions |
| WO1999016251A1 (en) * | 1997-09-23 | 1999-04-01 | Koninklijke Philips Electronics N.V. | Motion estimation and motion-compensated interpolation |
| JP3185763B2 (ja) * | 1998-07-13 | 2001-07-11 | 日本電気株式会社 | 動画像符号化装置 |
| JP4656680B2 (ja) * | 1998-11-30 | 2011-03-23 | シャープ株式会社 | 画像検索情報記録装置及び画像検索装置 |
| EP1296525A4 (en) * | 2000-06-28 | 2006-07-26 | Mitsubishi Electric Corp | IMAGE CODE AND PICTURE CODING PROCESS |
| CN1344112A (zh) * | 2000-09-18 | 2002-04-10 | 株式会社东芝 | 视频编码方法和视频编码设备 |
| US6678590B1 (en) * | 2000-10-17 | 2004-01-13 | Bbnt Solutions Llc | Vehicle navigation system with vision system preprocessor using MPEG encoder |
| US6931063B2 (en) * | 2001-03-26 | 2005-08-16 | Sharp Laboratories Of America, Inc. | Method and apparatus for controlling loop filtering or post filtering in block based motion compensationed video coding |
| US6680738B1 (en) * | 2002-02-22 | 2004-01-20 | Neomagic Corp. | Single-block virtual frame buffer translated to multiple physical blocks for multi-block display refresh generator |
| EP1478190B1 (en) * | 2002-04-26 | 2013-01-02 | NTT DoCoMo, Inc. | Image encoding device, image encoding method, and image encoding program |
| US7095786B1 (en) * | 2003-01-11 | 2006-08-22 | Neo Magic Corp. | Object tracking using adaptive block-size matching along object boundary and frame-skipping when object motion is low |
| US7689321B2 (en) * | 2004-02-13 | 2010-03-30 | Evolution Robotics, Inc. | Robust sensor fusion for mapping and localization in a simultaneous localization and mapping (SLAM) system |
| US20080089413A1 (en) * | 2004-06-28 | 2008-04-17 | Canon Kabushiki Kaisha | Moving Image Encoding Apparatus And Moving Image Encoding Method |
| EP1772017A2 (en) * | 2004-07-20 | 2007-04-11 | Qualcomm Incorporated | Method and apparatus for encoder assisted-frame rate up conversion (ea-fruc) for video compression |
| JP4622479B2 (ja) * | 2004-11-25 | 2011-02-02 | ソニー株式会社 | 再生装置および再生方法 |
| US7933328B2 (en) * | 2005-02-02 | 2011-04-26 | Broadcom Corporation | Rate control for digital video compression processing |
| US7400328B1 (en) * | 2005-02-18 | 2008-07-15 | Neomagic Corp. | Complex-shaped video overlay using multi-bit row and column index registers |
| US9667980B2 (en) * | 2005-03-01 | 2017-05-30 | Qualcomm Incorporated | Content-adaptive background skipping for region-of-interest video coding |
| US20060233253A1 (en) * | 2005-03-10 | 2006-10-19 | Qualcomm Incorporated | Interpolated frame deblocking operation for frame rate up conversion applications |
| EP1872590B1 (en) * | 2005-04-19 | 2014-10-22 | Telecom Italia S.p.A. | Method and apparatus for digital image coding |
| JP2007306524A (ja) * | 2006-05-15 | 2007-11-22 | Nec Electronics Corp | カメラ付き携帯機器及びその撮影支援方法 |
| WO2008077119A2 (en) * | 2006-12-19 | 2008-06-26 | Ortiva Wireless | Intelligent video signal encoding utilizing regions of interest information |
| US8953685B2 (en) * | 2007-12-10 | 2015-02-10 | Qualcomm Incorporated | Resource-adaptive video interpolation or extrapolation with motion level analysis |
| US10178406B2 (en) * | 2009-11-06 | 2019-01-08 | Qualcomm Incorporated | Control of video encoding based on one or more video capture parameters |
| US20110292997A1 (en) * | 2009-11-06 | 2011-12-01 | Qualcomm Incorporated | Control of video encoding based on image capture parameters |
| US8358359B2 (en) * | 2010-01-21 | 2013-01-22 | Microsoft Corporation | Reducing motion-related artifacts in rolling shutter video information |
| US9020033B2 (en) * | 2010-11-04 | 2015-04-28 | Nice-Systems Ltd. | System and method for enhancing compression using skip macro block on a compressed video |
| WO2012088629A1 (en) * | 2010-12-29 | 2012-07-05 | Technicolor (China) Technology Co., Ltd. | Method for generating motion synthesis data and device for generating motion synthesis data |
-
2010
- 2010-03-09 JP JP2010051562A patent/JP5583992B2/ja not_active Expired - Fee Related
-
2011
- 2011-01-28 CN CN201180012475.7A patent/CN102783153B/zh active Active
- 2011-01-28 WO PCT/JP2011/000487 patent/WO2011111292A1/ja not_active Ceased
-
2012
- 2012-09-05 US US13/604,175 patent/US9854167B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1066071A (ja) * | 1996-08-20 | 1998-03-06 | Fujitsu General Ltd | 映像データ送信装置 |
| JP2000350211A (ja) * | 1999-06-07 | 2000-12-15 | Toshiba Corp | 動画像符号化方法及び動画像符号化装置 |
| JP2001036908A (ja) * | 1999-07-15 | 2001-02-09 | Oki Electric Ind Co Ltd | 動画像圧縮装置 |
| JP2001245303A (ja) * | 2000-02-29 | 2001-09-07 | Toshiba Corp | 動画像符号化装置および動画像符号化方法 |
| JP2008236789A (ja) * | 2001-03-05 | 2008-10-02 | Intervideo Inc | 符号化プロセスの実行中にスキップするビデオシーケンスフレームを選択する方法 |
| JP2008532430A (ja) * | 2005-03-01 | 2008-08-14 | クゥアルコム・インコーポレイテッド | レート制御されたビデオ符号化のための適応フレーム・スキップ技術 |
| JP2008035281A (ja) * | 2006-07-28 | 2008-02-14 | Sanyo Electric Co Ltd | 画像符号化方法 |
| JP2009201103A (ja) * | 2008-01-22 | 2009-09-03 | Panasonic Corp | 映像信号処理装置 |
| JP2010199656A (ja) * | 2009-02-23 | 2010-09-09 | Panasonic Corp | 動画撮像装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013169785A1 (en) * | 2012-05-11 | 2013-11-14 | Qualcomm Incorporated | Motion sensor assisted rate control for video encoding |
| US20130301706A1 (en) * | 2012-05-11 | 2013-11-14 | Qualcomm Incorporated | Motion sensor assisted rate control for video encoding |
| US9451163B2 (en) | 2012-05-11 | 2016-09-20 | Qualcomm Incorporated | Motion sensor assisted rate control for video encoding |
| JP2015119335A (ja) * | 2013-12-18 | 2015-06-25 | Kddi株式会社 | 動き変化量に応じて撮影動画像のフレームを間引く端末、システム、プログラム及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102783153B (zh) | 2016-08-03 |
| US9854167B2 (en) | 2017-12-26 |
| JP2011188243A (ja) | 2011-09-22 |
| JP5583992B2 (ja) | 2014-09-03 |
| CN102783153A (zh) | 2012-11-14 |
| US20120328008A1 (en) | 2012-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5583992B2 (ja) | 信号処理装置 | |
| JP2011188243A5 (https=) | ||
| JP5908511B2 (ja) | ブロックベースの画像安定化 | |
| CN104702851B (zh) | 使用嵌入式数据的强大自动曝光控制 | |
| US9092861B2 (en) | Using motion information to assist in image processing | |
| US8624993B2 (en) | Video image pickup device | |
| US8237815B2 (en) | Image processing apparatus, control method therefor, for suppressing deterioration of image quality caused by a foreign substance | |
| JP2012257198A (ja) | 立体画像符号化装置、その方法、および立体画像符号化装置を有する撮像装置 | |
| JP2025000917A (ja) | 符号化装置 | |
| JP2015115903A (ja) | 撮像装置、撮像装置の制御方法、コンピュータプログラム | |
| CN114500787A (zh) | 基于照相机运动生成替代图像帧 | |
| US8488892B2 (en) | Image encoder and camera system | |
| JP2015023498A (ja) | 画像符号化装置、画像符号化方法およびプログラム | |
| US8405745B2 (en) | Image processing apparatus, image processing method, and program | |
| WO2016171006A1 (ja) | 符号化装置および符号化方法、並びに、復号装置および復号方法 | |
| US10880562B2 (en) | Image processing method and camera thereof | |
| US9762926B2 (en) | Image processing device and image processing method, program, and imaging apparatus | |
| KR102312681B1 (ko) | 영상 처리 시스템 및 방법 | |
| JP5482428B2 (ja) | 撮像装置、手ブレ補正方法、プログラム | |
| JPWO2012060030A1 (ja) | 動画像符号化方法および動画像符号化装置 | |
| JP2009188754A (ja) | 撮像装置におけるパン又はチルト検出方法、及び撮像装置 | |
| JP2005159925A (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| HK1144348B (en) | Image recording apparatus and image tilt correction method | |
| JP2018033082A (ja) | 画像符号化装置、画像符号化方法、及びプログラム | |
| HK1147832A (en) | Block-based image stabilization |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201180012475.7 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11752960 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11752960 Country of ref document: EP Kind code of ref document: A1 |