WO2009154174A1 - 電子内視鏡 - Google Patents
電子内視鏡 Download PDFInfo
- Publication number
- WO2009154174A1 WO2009154174A1 PCT/JP2009/060885 JP2009060885W WO2009154174A1 WO 2009154174 A1 WO2009154174 A1 WO 2009154174A1 JP 2009060885 W JP2009060885 W JP 2009060885W WO 2009154174 A1 WO2009154174 A1 WO 2009154174A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- electronic endoscope
- lens
- lens holder
- main body
- imaging
- Prior art date
Links
Images



























































































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00096—Optical elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00172—Optical arrangements with means for scanning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00174—Optical arrangements characterised by the viewing angles
- A61B1/00177—Optical arrangements characterised by the viewing angles for 90 degrees side-viewing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00174—Optical arrangements characterised by the viewing angles
- A61B1/00183—Optical arrangements characterised by the viewing angles for variable viewing angles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/042—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by a proximal camera, e.g. a CCD camera
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/045—Control thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
Definitions
- FIG. 6A It is a perspective view explaining the drive part which moves the lens holder holding an objective lens in the endoscope of FIG. It is a perspective view which fractures
- an imaging process is performed (step S2).
- the LED 55 is driven to irradiate illumination light
- the subject light is taken into the endoscope 1 from the objective lens 17 to form an image on the light receiving surface of the imaging element 23, and read out from the imaging element 23.
- Subject light is collected by the objective lens 17 through the cylindrical portion 313c of the translucent cover 313 and travels toward the objective mirror 16 as a parallel light flux. Then, the subject light is reflected by the reflecting surface of the objective mirror 16 and travels on the central axis of the cylindrical portion 315, in other words, on the central axis of the outer shell as a parallel light flux.
- the stepping motor 61 is driven with the designated number of pulses in step S3, the lens holder 319 is lowered and rotated, and the next field of view is “No. 002 ". Then, imaging is performed in the field of view of “No. 002”, and image data of the field of view of “No. 002” is generated from the imaging signal read from the image sensor 23.
- An illumination lens 557 that deflects the illumination light so as to be a parallel light beam with respect to the half mirror 553 is provided between the LED 555 and the half mirror 553.
- the half mirror 553, the illumination lens 557, and the LED 555 are fixed in the main body 511 by appropriate support members.
- the endoscope 500 can be configured to send captured image data to an external monitor so that the captured image can be observed on-line on the external monitor and to input an operation instruction from the outside.
- the control unit 581 sends the image signal acquired from the image sensor 523 to the external video processor as it is without performing image processing, and displays the subject image image-processed by the video processor on the external monitor.
- Communication between the external video processor or external monitor and the control unit 581 may be wired or wireless. When performing wired communication, an external power source can be used by inserting a power line in the wiring.
- the lens holder in the translucent cover is moved forward and backward by the drive unit, so that images can be taken from different positions on the central axis of the cylindrical portion of the lens holder and taken in from the wide-angle lens.
- the acquired image information can be accurately acquired within the moving range of the lens holder. Thereby, it is possible to easily acquire a wide range of continuous images without moving the electronic endoscope within the subject.
- the stepping motor 628 having the specified number of pulses is driven in step S5, and thus the cylindrical member 604b rotates by the specified number of pulses.
- the cylindrical member 604b is screwed into the main body 602 and retracted, and the next field of view is “No. 002” in FIG. 53.
- a subject image in this field of view is captured, and the image data is imaged. It is stored in the memory 626.
- the moving lens frame portion 604 is rotationally driven by the stepping motor 628.
- a motor that can accurately control the rotation angle and the rotation length is acceptable even if it is not a stepping motor. Needless to say.
- the outer shell is formed in a cylindrical shape
- a thread groove is formed on the inner peripheral surface of the peripheral wall
- the drive mechanism includes a lens holder that supports the objective lens, and the outer A motor for rotating the lens holder about the axis of the shell as a rotation axis, wherein the lens holder is engaged with the screw groove of the outer shell.
- the present specification discloses an electronic endoscope characterized in that an image memory for receiving and storing the image data transmitted wirelessly is provided in the main body.
- a stepping motor 1291 is installed on the uppermost substrate (on the opposite side to the bottom 1211a side) 1243.
- a motor gear (spur gear) 1293 is attached to the rotating shaft of the stepping motor 1291.
- control unit that performs image processing on an image signal obtained by the imaging unit and an image memory that stores image data processed by the control unit are incorporated in the main body unit.
- An electronic endoscope characterized by this is disclosed.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Abstract
広い範囲の詳細な画像情報を簡単に精度良く取得することが可能な新規な構造の電子内視鏡を提供する。 電子内視鏡1は、筒状に形成され、その周壁に軸方向に延びる透明な円筒部13cが設けられた外殻と、前記外殻の内部に設けられた固体撮像素子23と、前記窓部を通して被写体光を集光する対物レンズ17を含み、前記固体撮像素子に結像する対物光学系と、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸に沿って移動させる駆動機構と、を備える。
Description
本発明は電子内視鏡に関する。
特許文献1に記載の電子内視鏡は、孔内あるいは体腔内に細い挿入部を挿入し、挿入部の先端に取り付けた対物レンズを挿入方向の患部等に向け、画像情報を取得するようにしている。
また、特許文献2に記載の電子内視鏡は、挿入部の先端部の側面に対物レンズを設け、側方に広がる視野内の画像を撮像するようにしている。
また、特許文献3に記載の電子内視鏡は、挿入部の先端に全方位受光ユニットを設け、挿入部の先端の周方向全周にわたる画像を全方位受光ユニット内の凸面鏡に反射させて、撮像するようにしている。
また、特許文献4に記載の電子内視鏡は、医療分野で消化管の検診に用いられるカプセル型の電子内視鏡であって、撮像装置を内蔵し、消化管の蠕動運動によって消化管の内部を搬送されながら消化管の内部を撮像してゆく。
電子内視鏡の先端部に収納される撮像素子は、デジタルカメラ等に用いられる固体撮像素子より小面積、少画素数のものが多い。従って、患部等の詳細画像を撮像しようとした場合、1回1回の撮像で得られる画像情報は、夫々狭い視野範囲の画像に限られる。
このため、広い範囲の画像情報を綿密に取得しようとすると、内視鏡の操作者は、内視鏡の挿入位置を手操作で調整しながら複数回にわたり撮像することになる。つまり、患部等の探索すなわち挿入位置の調整作業と、撮像作業との両方に注意を払わなければならず、この作業には熟練を要していた。
また、挿入部先端全周の画像を全方位受光ユニットを用いて撮像する内視鏡の場合には、撮像した挿入位置全周範囲の画像情報を一度に得ることができるが、撮像部位は挿入位置の幅の狭い領域に限られる。そのため、広範囲な全周画像情報を得るためには、挿入位置を逐一調整しながら撮像することになり、画像同士のつなぎ目の情報が欠落したり、無駄な撮像を繰り返したりすることになりかねない。
また、カプセル型の内視鏡は、消化管の蠕動運動により消化管の内部を搬送される。そのため、視野を移動するための操作を要しないが、蠕動運動がない孔内あるいは体腔内には用いることができない。
本発明の目的は、広い範囲の詳細な画像情報を簡単に精度良く取得することが可能な新規な構造の電子内視鏡を提供することにある。
(1)筒状に形成され、その周壁に軸方向に延びる透明な窓部が設けられた外殻と、前記外殻の内部に設けられた固体撮像素子と、前記窓部を通して被写体光を集光する対物レンズを含み、前記固体撮像素子に結像する対物光学系と、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸に沿って移動させる駆動機構と、を備えることを特徴とする電子内視鏡。
(2)被検体の内部に挿入して被検体内を撮像する電子内視鏡であって、筒状部を有するレンズホルダと、前記レンズホルダに装着され、前記筒状部の一端側に、該筒状部の中心軸に光軸を合わせて配置し、前記筒状部の側方まで観察視野が広がる広角レンズと、前記広角レンズから取り込まれる光を受光し電気信号に変換する撮像素子と、前記筒状部の一端側を覆い、少なくとも前記広角レンズの観察視野内に対面する部位が透光性を有する透光性カバーと、前記筒状部の他端側で前記透光性カバーと接続される筒状の本体部と、前記本体部内に配置され前記レンズホルダを前記中心軸方向に進退させる駆動部と、を備えることを特徴とする電子内視鏡。
(3)少なくとも円筒部の観察窓が透明である円筒状の透光性カバーと、前記透光性カバーの前記円筒部に連設される円筒部を有する本体部と、前記透光性カバー及び前記本体部の内部で該透光性カバーの中心軸を中心に回転すると共に該中心軸の方向に移動するレンズホルダと、前記レンズホルダに設けられ前記透光性カバーの前記円筒部に対面する位置に設けられた対物レンズを通して入射する光を前記本体部の方向に反射する対物ミラーと、前記対物ミラーで反射された光を受光し電気信号に変換する撮像素子と、前記本体部の内部に設けられ前記レンズホルダを回転駆動すると共に前記中心軸方向に駆動する駆動部と、を備えることを特徴とする電子内視鏡。
(2)被検体の内部に挿入して被検体内を撮像する電子内視鏡であって、筒状部を有するレンズホルダと、前記レンズホルダに装着され、前記筒状部の一端側に、該筒状部の中心軸に光軸を合わせて配置し、前記筒状部の側方まで観察視野が広がる広角レンズと、前記広角レンズから取り込まれる光を受光し電気信号に変換する撮像素子と、前記筒状部の一端側を覆い、少なくとも前記広角レンズの観察視野内に対面する部位が透光性を有する透光性カバーと、前記筒状部の他端側で前記透光性カバーと接続される筒状の本体部と、前記本体部内に配置され前記レンズホルダを前記中心軸方向に進退させる駆動部と、を備えることを特徴とする電子内視鏡。
(3)少なくとも円筒部の観察窓が透明である円筒状の透光性カバーと、前記透光性カバーの前記円筒部に連設される円筒部を有する本体部と、前記透光性カバー及び前記本体部の内部で該透光性カバーの中心軸を中心に回転すると共に該中心軸の方向に移動するレンズホルダと、前記レンズホルダに設けられ前記透光性カバーの前記円筒部に対面する位置に設けられた対物レンズを通して入射する光を前記本体部の方向に反射する対物ミラーと、前記対物ミラーで反射された光を受光し電気信号に変換する撮像素子と、前記本体部の内部に設けられ前記レンズホルダを回転駆動すると共に前記中心軸方向に駆動する駆動部と、を備えることを特徴とする電子内視鏡。
本発明によれば、広い範囲の詳細な画像情報を簡単に精度良く取得することができる。
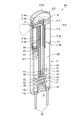
図1~図3に示す電子内視鏡1は、本体部11及び透光性カバー13で構成された外殻を備え、その内部に、透光性カバー13を通して被写体光を集光する対物レンズ17を保持したレンズホルダ19と、外殻内でレンズホルダ19を移動させる駆動部21と、対物レンズ17から取り込まれた被写体光を受光して電気信号に変換する固体撮像素子23と、を備えている。
外殻の一部を構成する本体部11は、遮光性を有する樹脂材などで形成されており、一方の端部11aは閉じられ、他方の端部11cは開口した円筒形に成形されている。閉じられた端部(底部)11aには筒状の電池収納部11bが設けられている。この電池収納部11bは、電源電池25が装着された後に電池蓋27によって閉塞される。
つまり、内視鏡1は、電源電池25を内蔵しており、外部からの電力供給を要しない。そのため、内視鏡1は、電力供給用のケーブルが接続される必要はなく、取り扱い性に優れる。
尚、図示の例では、底部11aに、2本の管29が外殻の外側に突出して設けられている。これらの管29は、例えば後述するメモリ83に格納された画像データや画像マップを外部の機器に転送する際に転送用のケーブルが挿通され、それを保護するために設けられている。また、管29は軟質なものであってもよいが、硬質なものとして、内視鏡1を使用する際に、内視鏡1を被検体の孔に挿入し、もしくは孔から引き出し、または内視鏡1を回転するための把持部としてもよい。
透光性カバー13は、円筒形に成形されており、一方の端部13bは開口している。透光性カバー13は、この開口端部13bを本体部11の開口端部11cに整合させ、接着等の適宜の手段により本体部11に固定されている。尚、内視鏡1において、外殻となる本体部11および透光性カバー13は、必ずしも円筒状である必要はなく、他の筒状であってもよい。
透光性カバー13の他方の端部(先端部)13aは、被検体の孔内への挿入を容易にするために、滑らかな半球状に成形されている。そして、先端部13aと開口端部13bとは、先端部13aと同径に成形された円筒部13cにより接続されている。先端部13aおよび円筒部13cは、開口端部13bに比べて小径に成形されている。このように、半球状に成形された先端部13aおよび円筒部13cを細くすることで、比較的狭い被検体の孔内への挿入を容易とすることができ、内視鏡1の利用範囲を拡げることができる。
上記構成の透光性カバー13は、透明な樹脂材などを用い、例えば一体成形により作製することができる。また、半球状に成形される先端部13a、開口端部13b、および円筒部13cを個別の部材とし、接着等の適宜に手段により互いに接合して作製してもよい。その場合に、少なくとも、被検体の孔内の内周面を臨む窓部となる円筒部13cは透明に形成される。尚、本発明において透明とは、撮像素子23を感光させる特定の波長の光に対して透明であればよく、必ずしも可視光に対して透明でなくてもよい。
レンズホルダ19は、樹脂材などで形成されており、本体部11に内嵌する円盤状の鍔部33と、鍔部33よりも小径に成形されて透光性カバー13の円筒部13c内に進入可能な筒状部15と、を有している。鍔部33は、その外径が本体部11の内径よりも若干小径に成形され、本体部11の中心軸、換言すれば外殻の中心軸に沿って本体部11内をガタツキなくスムースに移動できるようになっている。また、筒状部15は、その外径が透光性カバー13の円筒部13cの内径よりも若干小径に成形され、外殻の中心軸に沿って円筒部13c内でガタツキなくスムースに移動できるようになっている。
レンズホルダ19の鍔部33には、その外周面に係合溝35が形成されている。本体部11の内周面には、外殻の軸に沿って延びるリブ31が形成されており、レンズホルダ19は、鍔部33の係合溝35を本体部11のリブ31に係合させている。そのため、レンズホルダ19は、外殻の中心軸に沿って移動を案内され、後述する送りネジ67を回転軸とする回転を止められる。尚、図示の例では、2つの係合溝35が円周方向に間隔をおいて設けられているが、その数に特に制限はない。
筒状部15の先端部には、対物ミラー16が収納されている。この対物ミラー16は、円柱を、その中心軸に斜め45度で交差する傾斜面で切断した形状となっており、その傾斜面は反射膜が製膜されるなどして反射面とされている。
そして、筒状部15において対物ミラー16の反射面を径方向に臨む部位には撮像孔が形成されており、この撮像孔に対物レンズ17が設置されている。被写体光は、透光性カバー13の円筒部13cを通して対物レンズ17により集光され、平行光束として対物ミラー16に向けて進行する。そして、被写体光は、対物ミラー16の反射面で反射され、平行光束のまま、外殻の中心軸と平行に筒状部15の中心軸上を進行するようになっている。
本体部11内において、レンズホルダ19の筒状部15の中心軸の延長線上にあたる位置には、撮像駆動ユニット部37が配置されている。撮像駆動ユニット部37は、図示しない固定部材を用いて本体部11内に固定されている。この撮像駆動ユニット部37は3枚の基板41,42,43を備えている。
図4に撮像駆動ユニット部37を拡大して示す。レンズホルダ19に最も接近して配置された基板43には、固体撮像素子23が設けられている。撮像素子23としては、CCD型イメージセンサやCMOS型イメージセンサなどを用いることができる。基板43の下(本体部11の底部11a側)に配置された基板42には、メモリ83が設けられている。このメモリ83は、撮像素子23から読み出された撮像信号から生成される画像データなどを格納する。そして、基板42の下に配置された基板41には、制御ユニット45が設けられている。この制御ユニット45は、例えば撮像素子23からの撮像信号の読み出し、読み出された撮像信号からの画像データの生成、等を行う。
撮像素子23は、基板43上でレンズホルダ19の筒状部15の中心軸の延長線上にあたる位置に設けられている。そして、筒状部15の中心軸の延長線上で撮像素子23の上方にあたる位置には集光レンズ51が配置されている。集光レンズ51は、撮像素子23を包囲するように基板43上に設置された集光レンズホルダ49に保持されている。この集光レンズ51は、筒状部15の中心軸上を平行光束として進行する被写体光L1を撮像素子23の受光面に結像させる。すなわち、対物レンズ17、対物ミラー16、および集光レンズ51により対物光学系が構成されている。
また、レンズホルダ19の筒状部15に収納された対物ミラー16と集光レンズ51との間の被写体光の光路上には、ハーフミラー53が配置されている。ハーフミラー53は、対物ミラー16から集光レンズ51に向けて進行する被写体光の少なくとも一部を透過させる。また、対物ミラー16と集光レンズ51との間の被写体光の光路から外れてハーフミラー53を臨む位置に、被写体を照明するための光源としての発光ダイオード(LED)55が設けられている。LED55から射出された照明光L2は、LED55とハーフミラー53との間に配置された照明レンズ57により平行光束とされてハーフミラー53に入射し、少なくともその一部が対物ミラー16に向けて反射される。そして、対物ミラー16に入射した照明光は、対物レンズ17に向けて反射され、対物レンズ17および透光性カバー13を通して被写体に照射される。尚、これらハーフミラー53、LED55、照明レンズ57は、それぞれ適宜な固定部材により本体部11内に固定されている。
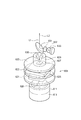
ここで、レンズホルダ19は、上述のとおり鍔部33の係合溝35を本体部11のリブ31に係合させることにより、外殻の中心軸に沿って移動を案内されている。そして、外殻の中心軸に沿って移動を案内されたレンズホルダ19は、筒状部15に保持した対物レンズ17の高さが図5Aに示すh1から、図5Bに示す高さhnとなるまで移動可能となっている。以下に、レンズホルダ19を移動させる駆動部21について、図3、図6A、図6B、及び図7を参照しつつ詳細に説明する。
本体部11内には、外殻の中心軸と平行に配置された送りネジ67と、送りネジ67を回転駆動する動力源としてのステッピングモータ61と、が設けられている。ステッピングモータ61の回転軸にはモータギア63が一体に取り付けられ、送りネジ67の一端部にはギア69が一体に取り付けられている。そして、モータギア63とギア69との間に介在して、両ギア63、69にそれぞれ噛み合うアイドルギア65が設けられている。ステッピングモータ61およびアイドルギア65は、適宜な固定部材により本体部11内に固定されている。また、送りネジ67は、図7に示すように、透光性カバー13の開口端部13bのフランジ面に形成された軸穴13dに一端部を挿入し、撮像駆動ユニット部37の集光レンズホルダ49の側方に設けた支持アーム71に他端部を支持され、その中心軸まわりに回転可能となっている。
ステッピングモータ61の回転は、モータギア63、アイドルギア65、ギア69を介して送りネジ67に伝達される。なお、アイドルギア65の歯数はモータギア63の歯数より多く、ステッピングモータ61の回転を減速してアイドルギア65に伝達するようになっている。ここで、送りネジ67を回転駆動する動力源は、パルス駆動されるステッピングモータに限らず、エンコーダを有するサーボモータ等の各種モータ、あるいは他の動力源を用いることもできる。
一方、レンズホルダ19の鍔部33には、ステッピングモータ61、モータギア63、アイドルギア65、送りネジ67、ギア69、等を挿通させることができる通孔73が形成されている。そして、レンズホルダ19には、送りネジ67に螺合する送りナット75が、ナット押さえ77を用いて一体に取り付けられている。レンズホルダ19は、上述のとおり外殻の中心軸に沿って図の上下方向への移動のみを許容され、送りネジ67を回転軸とする回転移動を規制されて案内されている。そのため、送りネジ67の回転により、この送りネジ67に螺合している送りナット75およびそれを保持するレンズホルダ19は、送りネジ67に沿って、つまりは外殻の中心軸に沿って移動する。
例えば、レンズホルダ19が図6Aに示す上昇位置にある状態で、ステッピングモータ61を所定の方向に回転駆動し、モータギア63、アイドルギア65、ギア69を介して送りネジ67を回転させる。送りネジ67の回転に伴い、送りナット75が送りネジ67に沿って移動する。それにより、送りナット75と一体であるレンズホルダ19を図6Bに示す下降位置まで降下させることができる。
図8は、撮像駆動ユニット部37の機能ブロック図である。撮像駆動ユニット部37は、LED55を駆動するLED駆動回路85と、撮像素子23を駆動する撮像素子ドライバ87と、ステッピングモータ61を駆動するモータドライバ89と、このモータドライバ89に駆動パルスを供給するパルス発生器91と、これらLED駆動回路85、撮像素子ドライバ87、およびパルス発生器91の動作を制御する制御部81と、を制御ユニット45に備えている。また、メモリ83には、制御ユニット45の制御プログラムが格納されている。尚、メモリ83は、制御プログラムを格納するとともに、画像データを格納し、またワークメモリとしても動作しており、制御部81は、撮像素子23から読み出した撮像信号に適宜画像処理を施して画像データを生成し、生成した画像データをメモリ83に格納する。かかる構成によれば、内視鏡1単体で被写体の画像を取得・保存することができ、取り扱い性に優れる。
内視鏡1の電源スイッチ93が閉じられると、電源電池25からの電力が図示しない配線を通して撮像駆動ユニット部37の各部に供給され、撮像が行われる。電源スイッチ93は、例えば、本体部11の底部11aに設けられ、手操作により開閉される構成としても良い。あるいは、本体部11に磁力に応動するスイッチ端子を内蔵させ、内視鏡1の外部から、磁石を近づけたり離したりすることで、このスイッチ端子を開閉操作する構成としても良い。
次に、内視鏡1の動作について説明する。電源スイッチ93が投入され、電源電池25から各部に電力が供給される。そして、LED55からの照明光が、対物レンズ17および透光性カバー13の円筒部13cを通して側方に照射され、被写体が照明される。
被写体からの反射光は、透光性カバー13の円筒部13cおよび対物レンズ17を通して内視鏡1内に取り込まれ、集光レンズ51によって撮像素子23の受光面上に結像される。光電変換により撮像素子23に蓄積された電荷は、制御ユニット45の制御部(CPU)81により撮像信号として読み出される。制御部81は、読み出した撮像信号に適宜画像処理を施して画像データを生成し、生成した画像データをメモリ83に格納する。
図9は、制御ユニット45の制御プログラムの処理手順を示すフローチャートである。電源スイッチ93が投入されると、先ず、ステッピングモータ61が回転駆動され、レンズホルダ19が、内視鏡1の外殻の中心軸に沿って進み、原点位置にセットされる(ステップS1)。尚、原点位置とは、例えば図5Aに示す位置であって、対物レンズ17が内視鏡1の先端側となる位置とするが、これに限らず、対物レンズ17が反対の基端側となる位置(図5Bに示す位置)であってもよい。
レンズホルダ19が原点位置にセットされた後、撮像処理を行う(ステップS2)。撮像処理とは、LED55を駆動して照明光を照射し、被写体光を対物レンズ17から内視鏡1内に取り込んで撮像素子23の受光面に結像させ、そして、撮像素子23から読み出した撮像信号をもとに画像データを生成してメモリ83に格納する処理を含む。
次に、指定したパルス数だけステッピングモータ61を駆動し(ステップS3)、レンズホルダ19を所定距離だけ降下させる。レンズホルダ19が最降下位置に達するまでは(ステップS4)、その移動先で撮像処理(ステップS2)を行う。レンズホルダ19が最降下位置に到達したらレンズホルダ19の降下および撮像処理を終了する(ステップS4)。尚、内視鏡1では、メモリ83に格納された複数の画像データを合成して図10に示すような画像マップを作成している(ステップS5)。
図10に示す画像マップにおいて、画像データIMG(1)は、初回に撮像された画像データであり、対物レンズ17が図5Aに示す高さh1にあるときの視野範囲W1の画像データである。また、画像データIMG(2)は、2回目に撮像された画像データであり、対物レンズ17がレンズホルダ19とともに所定距離降下された高さh2にあるときの視野範囲W2の画像データである。
このようにレンズホルダ19を移動させて各移動位置で得た複数の画像データIMG(1)~(n)を、その撮像順にレンズホルダ19の移動方向に順次結合して、実質的に一枚の画像データ(画像マップ)にする。尚、例えばステップS3においてステッピングモータ61に供給されるパルス数を適宜調節し、あるいは送りネジ67のネジピッチを適宜調節するなどして、ある回の撮像処理の視野範囲の一部が前回の撮像処理の視野範囲に重なるようにすれば、軸方向に被写体をもれなく撮影でき、隙間のない画像マップを得ることができる。
上記の画像マップが作成された後は、この画像マップをメモリ83(図8参照)から外部に読み出すことになる。この読み出しは、無線を用いて行っても良く、また、転送用のケーブルを図1に示す管29内に挿通して撮像駆動ユニット部37に接続し、このケーブルを用いて読み出しても良い。あるいは、メモリ83を内視鏡1から取り出し可能に設けておき、取り出したメモリ83を別置のパーソナルコンピュータで読むようにしても良い。
また、内視鏡1は、画像データを外部モニタに送り、外部モニタで画像をオンラインで観察できるようにし、更に、外部から操作指示を入力する構成にもできる。その場合には、制御部81は画像処理を行うことなく、撮像素子23から取得した撮像信号をそのまま外部のビデオプロセッサに送り、ビデオプロセッサが画像処理した被写体画像を外部モニタに表示する。外部のビデオプロセッサや外部モニタと制御部81との間の通信は、有線でも無線でも良い。有線で通信を行う場合には、配線中に電源線を入れることで、外部電源を利用することも可能となる。
また、他の制御プログラム例として、図9のフローチャートに示す制御手順の他に、外部からの操作指示に従って、例えば対物レンズ17による視野範囲を、任意の位置に移動させる制御プログラムを用いてもよい。この場合には、撮像目的に応じて所望の部位を選択的に撮像することができ、注目したい部位をより詳細に観察することが可能となる。
上述した内視鏡1によれば、孔に装着された後に、駆動部21により対物レンズ17が軸方向に移動され、それに伴って視野が軸方向に移動する。そのため、操作に熟練を要することなく孔の内周面の画像を広範囲に精度よく取得することができる。
図11~図13に示す電子内視鏡101は、本体部11及び透光性カバー13で構成された外殻を備え、その内部に、透光性カバー13を通して被写体光を集光する対物レンズ群117を保持したレンズホルダ119と、外殻内でレンズホルダ119を移動させる駆動部21と、対物レンズ群117から取り込まれた被写体光を受光して電気信号に変換する固体撮像素子23と、を備えている。尚、上述した内視鏡1と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
レンズホルダ119は、樹脂材などで形成されており、本体部11に内嵌する円盤状の鍔部33と、鍔部33よりも小径に成形されて透光性カバー13の円筒部13c内に進入可能な筒状部115と、を有している。鍔部33は、本体部11の中心軸、換言すれば外殻の中心軸に沿って本体部11内をガタツキなくスムースに移動できるようになっている。また、筒状部115は、外殻の中心軸に沿って円筒部13c内でガタツキなくスムースに移動できるようになっている。
内視鏡101において、レンズホルダ119に保持される対物レンズ群117は広角レンズを含んでおり、広角レンズ117Aおよびレンズ117Bで構成されている。広角レンズ117Aとしては、好ましくは魚眼レンズが用いられる。この場合の魚眼レンズとしては、円周魚眼レンズが傾斜角(レンズ光軸からの角度)の大きい全周方向の観察に好適に利用できる。すなわち、本発明の広角レンズは、対物レンズ群117の光軸方向(筒状部115の中心軸方向)に対して側方全周方向の観察が可能な観察視野を有する広角レンズである。なお、広角レンズ117Aとしては、この他にも対角魚眼レンズ、一般的な広角レンズ等を用いることもできる。対物レンズ群117は、そのレンズ光軸をレンズホルダ119の筒状部115の中心軸に一致させ、筒状部115の先端側の開口部に取り付けられている。
被写体光は、透光性カバー13の円筒部13cを通して対物レンズ群117により集光され、平行光束として外殻の中心軸と平行に筒状部115の中心軸上を進行するようになっている。本体部11内において、レンズホルダ119の筒状部115の中心軸の延長線上にあたる位置には、撮像駆動ユニット部37が配置されている。この撮像駆動ユニット部37、およびレンズホルダ119を移動させる駆動部21は上述した内視鏡1と同一であるので、説明を省略する。
次に、内視鏡101の動作について説明する。図8を参照して、電源スイッチ93が投入され、電源電池25から各部に電力が供給される。そして、LED55からの照明光が、対物レンズ群117および透光性カバー13の円筒部13cを通して側方に照射され、被写体が照明される。被写体からの反射光は、透光性カバー13の円筒部13cおよび対物レンズ群117を通して内視鏡1内に取り込まれ、集光レンズ51によって撮像素子23の受光面上に結像される。
ここで、図14に対物レンズ群117による視野範囲Wの様子を示す。広角レンズ117Aから出射される照明光は、視野範囲Wで示す範囲に照射される。この照明光による被写体からの反射光は、視野範囲Wに入射された光が撮像素子23に結像されて取り込まれる。尚、符号Mは、視野範囲をWに限定するためのマスクである。
そして、光電変換により撮像素子23に蓄積された電荷は、制御ユニット45の制御部(CPU)81により撮像信号として読み出される。制御部81は、読み出した撮像信号に適宜画像処理を施して画像データを生成し、生成した画像データをメモリ83に格納する。
内視鏡101の制御プログラムは、上述した内視鏡1のものと同じであり、図9を参照して、電源スイッチ93が投入されると、先ず、ステッピングモータ61が回転駆動され、レンズホルダ119が、内視鏡1の外殻の中心軸に沿って進み、原点位置にセットされる(ステップS1)。レンズホルダ119が原点位置にセットされた後、撮像処理を行う(ステップS2)。
次に、指定したパルス数だけステッピングモータ61を駆動し(ステップS3)、レンズホルダ119を所定距離だけ降下させる。尚、所定距離とは、図14に示す視野範囲Wがレンズホルダ119の可動範囲を段だら状に埋めるように、レンズホルダ119をステップ移動させる距離であり、例えば、透光性カバー13の円筒部13cにおいて視野範囲Wに含まれる部分の高さLaとすることができる。
レンズホルダ119が最降下位置に達するまでは(ステップS4)、その移動先で撮像処理(ステップS2)を行う。レンズホルダ119が最降下位置に到達したらレンズホルダ119の降下および撮像処理を終了する(ステップS4)。尚、内視鏡101においても、メモリ83に格納された複数の画像データを合成して図15に示すような画像マップを作成している(ステップS5)。
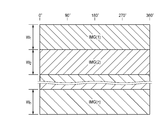
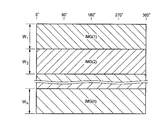
図15に示す画像マップにおいて、画像データIMG(1)は、初回に撮像された画像データであり、対物レンズ群117が高さh1にあるときの全方位(円周角0°~360°)の視野範囲W1の画像データである。また、画像データIMG(2)は、2回目に撮像された画像データであり、対物レンズ群117がレンズホルダ119とともに所定距離降下された高さh2にあるときの全方位の視野範囲W2の画像データである。このようにレンズホルダ119を移動させて各移動位置で得た複数の画像データIMG(1)~(n)を、その撮像順にレンズホルダ119の移動方向に順次結合して、実質的に一枚の画像データ(画像マップ)にする。
内視鏡101によれば、対物レンズ群117に広角レンズ117Aを用いており、内視鏡1に比べて円周方向に関してより広範に撮像することができ、特に魚眼レンズを用いれば全方位について撮像することができる。
図16~図18に示す電子内視鏡201は、本体部11及び透光性カバー13で構成された外殻を備え、その内部に、透光性カバー13を通して被写体光を集光する対物レンズ17を保持したレンズホルダ219と、外殻内でレンズホルダ219を軸方向に移動させる駆動部221と、対物レンズ17から取り込まれた被写体光を受光して電気信号に変換する固体撮像素子23と、を備えている。上述した内視鏡1と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
レンズホルダ219は、樹脂材などで形成されており、本体部11に内嵌する円盤状の鍔部233と、鍔部233よりも小径に成形されて透光性カバー13の円筒部13c内に進入可能な筒状部215と、を有している。鍔部233は、本体部11の中心軸、換言すれば外殻の中心軸に沿って本体部11内をガタツキなくスムースに移動できるようになっている。また、筒状部215は、外殻の中心軸に沿って円筒部13c内でガタツキなくスムースに移動できるようになっている。
筒状部215と鍔部233とは別部材とされており、筒状部215は、鍔部233に組み付けられている。鍔部233の中心部には、円筒状の軸部236が突出して設けられている。筒状部215は、その基端部を軸部236に外嵌させて鍔部233に組み付けられており、軸部236を回転軸に回転自在に支持されている。
レンズホルダ219の鍔部233には、その外周面に係合溝35が形成されている。本体部11の内周面には、外殻の軸に沿って延びるリブ31が形成されており、レンズホルダ219は、鍔部233の係合溝235を本体部11のリブ31に係合させている。そのため、レンズホルダ219は、外殻の中心軸に沿って移動を案内され、後述する送りネジ67を回転軸とする回転を止められる。
筒状部215の先端側には、対物ミラー16が収納されている。そして、筒状部215において対物ミラー16の反射面を径方向に臨む部位には撮像孔が形成されており、この撮像孔に対物レンズ17が設置されている。被写体光は、透光性カバー13の円筒部13cを通して対物レンズ17により集光され、平行光束として対物ミラー16に向けて進行する。そして、被写体光は、対物ミラー16の反射面で反射され、平行光束のまま、外殻の中心軸と平行に筒状部215の中心軸上を進行するようになっている。
本体部11内において、レンズホルダ19の筒状部15の中心軸の延長線上にあたる位置には、撮像駆動ユニット部37が配置されている。撮像駆動ユニット部37については、上述した内視鏡1と同一であるので、説明を省略する。
レンズホルダ219は、上述のとおり鍔部233の係合溝35を本体部11のリブ31に係合させることにより、外殻の中心軸に沿って移動を案内されている。以下に、レンズホルダ219を外殻の中心軸に沿って移動させる駆動部221について、図18および図19を参照しつつ詳細に説明する。
本体部11内には、外殻の中心軸と平行に配置された送りネジ67と、送りネジ67を回転駆動する動力源としてのステッピングモータ61と、が設けられている。ステッピングモータ61の回転軸にはモータギア63が取り付けられ、送りネジ67の一端部にはギア69が取り付けられている。そして、モータギア63とギア69との間に介在して、両ギア63、69にそれぞれ噛み合うアイドルギア65が設けられている。ステッピングモータ61の回転は、モータギア63、アイドルギア65、ギア69を介して送りネジ67に伝達される。
一方、レンズホルダ219の鍔部233には、ステッピングモータ61、モータギア63、アイドルギア65、送りネジ67、ギア69、等を挿通させることができる通孔73が形成されている。そして、鍔部233の通孔73の周縁部には、送りネジ67に螺合する送りナット75が、ナット押さえ77を用いて取り付けられている。レンズホルダ219は、上述のとおり外殻の中心軸に沿って移動を案内されており、換言すれば、送りネジ67を回転軸とする回転を止められている。そのため、送りネジ67の回転により、この送りネジ67に螺合している送りナット75およびそれを保持するレンズホルダ219は、送りネジ67に沿って、つまりは外殻の中心軸に沿って移動する。
さらに、駆動部221には、送りネジ67と平行に配置された回転軸268が設けられている。回転軸268は、その外周面に外歯歯車が形成され、送りネジ67に固定されたギア69に噛み合っており、送りネジ67と共にその中心軸まわりに回転する。そして、筒状部215の基端部には、回転軸268に噛み合うギア270が圧入や接着などの適宜な手段により固定されている。送りネジ67が回転するのに伴って、筒状部215のギア270はレンズホルダ219と共に軸方向に移動しながら回転軸268との噛み合いを維持し、筒状部215は、回転軸268およびギア270を介して回転駆動される。
例えば、レンズホルダ219が図20に示す上昇位置にある状態で、ステッピングモータ61を所定の方向に回転駆動し、モータギア63、アイドルギア65、ギア69を介して送りネジ67を回転させる。送りネジ67の回転に伴い、送りナット75が送りネジ67に沿って移動する。それにより、レンズホルダ219を降下させることができる。
そして、図21に示すようにレンズホルダ219がΔhだけ降下する間に、筒状部215が、回転軸268およびギア270を介して所定角度だけ回転駆動される。筒状部215の回転に伴って対物レンズ17もまた回転され、それにより撮像視野が円周方向に移動する。
次に、内視鏡201の動作について説明する。図8を参照して、電源スイッチ93が投入され、電源電池25から各部に電力が供給される。そして、LED55からの照明光が、対物レンズ17および透光性カバー13の円筒部13cを通して側方に照射され、被写体が照明される。被写体からの反射光は、透光性カバー13の円筒部13cおよび対物レンズ17を通して内視鏡201内に取り込まれ、集光レンズ51によって撮像素子23の受光面上に結像される。光電変換により撮像素子23に蓄積された電荷は、制御ユニット45の制御部(CPU)81により撮像信号として読み出される。制御部81は、読み出した撮像信号に適宜画像処理を施して画像データを生成し、生成した画像データをメモリ83に格納する。
内視鏡201の制御プログラムは、上述した内視鏡1のものと同じであり、図9を参照して、電源スイッチ93が投入されると、先ず、ステッピングモータ61が回転駆動され、レンズホルダ219が、内視鏡201の外殻の中心軸に沿って進み、原点位置にセットされる(ステップS1)。レンズホルダ219が原点位置にセットされた後、撮像処理を行う(ステップS2)。次に、指定したパルス数だけステッピングモータ61を駆動し(ステップS3)、レンズホルダ219を所定距離だけ降下させる。レンズホルダ219が最降下位置に達するまでは(ステップS4)、その移動先で撮像処理(ステップS2)を行う。レンズホルダ219が最降下位置に到達したらレンズホルダ219の降下および撮像処理を終了する(ステップS4)。
図22は、上記ステップS2~S4を繰り返し実行するときの撮像視野の移動を例示する図である。原点位置で行う初回の撮像処理では、「No.001」の視野で撮像が行われ、撮像素子23から読み出された撮像信号から「No.001」の視野の画像データが生成される。
この視野「No.001」での撮像処理が済んだ後、ステップS3で指定パルス数でのステッピングモータ61の駆動が行われ、レンズホルダ219が降下すると共に筒状部215が回転し、次の視野は「No.002」となる。そして、「No.002」の視野で撮像が行われ、撮像素子23から読み出された撮像信号から「No.002」の視野の画像データが生成されることになる。
以後、視野を「No.003」→「No.004」→「No.005」・・・と移動させて撮像処理を繰り返す。筒状部215が原点位置から一周したときの撮像視野は図22の「No.011」となり、二周したときの撮像視野は図22の「No.021」となる。
尚、例えばステップS3においてステッピングモータ61に供給されるパルス数を適宜調節し、あるいは送りネジ67のネジピッチを適宜調節するなどして、円周方向に隣接する撮像視野同士の左右の端部が接し、あるいは若干重なる様に、また、軸方向に隣接する撮像視野同士の上下の端部が接し、あるいは若干重なる様にしてもよい。それによれば、軸方向および円周方向に被写体をもれなく撮影でき、隙間のない画像マップを得ることができる。
内視鏡201によれば、駆動部221により対物レンズ17が軸方向および円周方向に移動され、それに伴って視野が軸方向および円周方向に移動する。そのため、内視鏡101のように魚眼レンズを用いずとも、全方位について撮像することができる。
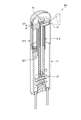
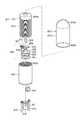
図23~図25に示す電子内視鏡301は、本体部11及び透光性カバー313で構成された外殻を備え、その内部に、透光性カバー313を通して被写体光を集光する対物レンズ17を保持したレンズホルダ319と、外殻内でレンズホルダ319を移動させる駆動部321と、対物レンズ17から取り込まれた被写体光を受光して電気信号に変換する固体撮像素子23と、を備えている。尚、上述した内視鏡1と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
透光性カバー313は、円筒形に成形されており、一方の端部313bは開口している。透光性カバー313は、この開口端部313bを本体部11の開口端部11cに整合させ、本体部11に固定されている。透光性カバー313の他方の端部(先端部)313aは、被検体の孔への挿入を容易にするために、滑らかな半球状に成形されている。そして、先端部313aと開口端部313bとは、先端部313aと同径に形成された円筒部313cにより接続されている。内視鏡301において、先端部313aおよび円筒部313cは、開口端部313bと同径に成形されている。
上記構成の透光性カバー313は、透明な樹脂材などを用い、例えば一体成形により作製することができるが、少なくとも被検体の孔の内周面を臨む窓部となる円筒部313cが透明に形成されていればよい。
レンズホルダ319は、樹脂材などで形成されており、略円盤状に成形された対物レンズ搭載部314と、対物レンズ搭載部314よりも小径の円筒状に成形された筒状部315とを備えている。筒状部315は、その中心軸が、透光性カバー313の中心軸、換言すれば外殻の中心軸と一致するように配置されており、対物レンズ搭載部314は、筒状部315と同軸となるように筒状部315の先端に設けられている。
対物レンズ搭載部314は、その外径が透光性カバー313の円筒部313cの内径よりも若干小径に成形され、透光性カバー313の中心軸、換言すれば外殻の中心軸に沿って透光性カバー313内をガタツキなくスムースに移動できるようになっている。
筒状部315の外周面には、外歯歯車315aが形成されている。この外歯歯車315aの歯は、筒状部315の中心軸と平行に延び、周方向に等間隔に形成されている。また筒状部315の内周面には、後述する送りネジ367の外周面に形成されたネジ溝に螺合する雌ネジ315bが形成されている。
対物レンズ搭載部314には、筒状部315の先端開口に連なって筒状部315の軸方向に延びる円柱孔314aが形成されており、この円柱孔314a内に、対物ミラー16が収納されている。さらに、対物レンズ搭載部314には、半径方向に延び、一端はその外周面に開口するとともに、他端は対物ミラー16の反射面を径方向に臨むように円柱孔314aに通じる撮像孔314bが形成されており、この撮像孔314bの外周側開口部に対物レンズ17が設置されている。
被写体光は、透光性カバー313の円筒部313cを通して対物レンズ17により集光され、平行光束として対物ミラー16に向けて進行する。そして、被写体光は、対物ミラー16の反射面で反射され、平行光束のまま、筒状部315の中心軸上を、換言すれば外殻の中心軸上を進行するようになっている。
本体部11内において、レンズホルダ319の筒状部315の中心軸の延長線上にあたる位置には、撮像駆動ユニット部37が配置されている。撮像駆動ユニット部37については、上述した内視鏡1と同一であるので、説明を省略する。
撮像駆動ユニット部37の基板43には、レンズホルダ319の筒状部315と同軸に送りネジ367が組み付けられている。送りネジ367は、円筒状に成形されており、その内側に集光レンズホルダ49を収容している。そして、送りネジ367は、その外周面にネジ溝が形成されており、このネジ溝を筒状部315の内周面の雌ネジ315bに螺合させて筒状部315内に挿入されている。筒状部315の中心軸上を進む被写体光は、送りネジ367内に進入して集光レンズホルダ49に保持された集光レンズ51に入射し、そして集光レンズ51によって撮像素子23の受光面に結像される。
尚、被写体を照明する光源となるLED55は、送りネジ367の外側に配置されており、LED55の照明光を対物ミラー16に向けて反射するハーフミラー53は、送りネジ367の内側にあって、被写体光の光路途中に配置されている。LED55とハーフミラー53との間に介在する送りネジ367の筒壁には取り付け孔が形成されており、この取り付け孔に照明レンズ57が取り付けられている。LED55の照明光は、照明レンズ57により平行光束とされてハーフミラー53に入射し、少なくともその一部が対物ミラー16に向けて反射される。そして、対物ミラー16に入射した照明光は、対物レンズ17に向けて反射され、対物レンズ17および透光性カバー313を通して被写体に照射される。
ここで、筒状部315を送りネジ367に螺合させたレンズホルダ319は、送りネジ367に沿って、換言すれば外殻の中心軸に沿って移動を案内される。以下に、レンズホルダ319を外殻の中心軸に沿って移動させる駆動部321について、図24を参照しつつ詳細に説明する。
本体部11内にはステッピングモータ61が固定されており、また、ステッピングモータ61のモータギア63とレンズホルダ319の筒状部315に形成された外歯歯車315aとの間に介在して、両者にそれぞれ噛み合うアイドルギア65が設けられている。ステッピングモータ61の回転は、モータギア63、アイドルギア65を介してレンズホルダ319に伝達される。
レンズホルダ319は、筒状部315を送りネジ367に外嵌させており、よって、ステッピングモータ61の回転が伝達されたレンズホルダ319は、送りネジ367を回転軸として回転する。同時に筒状部315は、その内周面に形成された雌ネジ315bにより送りネジ367に螺合している。そのため、レンズホルダ319は、送りネジ367を回転軸として回転するのに伴い、送りネジ367に沿って移動する。
例えば、レンズホルダ319が図26に示す上昇位置にある状態で、ステッピングモータ61を所定の方向に回転駆動し、モータギア63、アイドルギア65を介してレンズホルダ319を回転させる。これにより、図27に示すように、レンズホルダ319は、送りネジ367を回転軸として回転しながら、送りネジ367に沿ってΔhだけ降下する。レンズホルダ319の回転に伴って対物レンズ17もまた回転され、それにより撮像視野が円周方向に移動する。
次に、内視鏡301の動作について説明する。図8を参照して、電源スイッチ93が投入され、電源電池25から各部に電力が供給される。そして、LED55からの照明光が、対物レンズ17および透光性カバー313の円筒部313cを通して側方に照射され、被写体が照明される。被写体からの反射光は、透光性カバー313の円筒部313cおよび対物レンズ17を通して内視鏡301内に取り込まれ、集光レンズ51によって撮像素子23の受光面上に結像される。光電変換により撮像素子23に蓄積された電荷は、制御ユニット45の制御部(CPU)81により撮像信号として読み出される。制御部81は、読み出した撮像信号に適宜画像処理を施して画像データを生成し、生成した画像データをメモリ83に格納する。
内視鏡301の制御プログラムは、上述した内視鏡1のものと同じであり、図9を参照して、電源スイッチ93が投入されると、先ず、ステッピングモータ61が回転駆動され、レンズホルダ319が、内視鏡301の外殻の中心軸に沿って進み、原点位置にセットされる(ステップS1)。レンズホルダ319が原点位置にセットされた後、撮像処理を行う(ステップS2)。次に、指定したパルス数だけステッピングモータ61を駆動し(ステップS3)、レンズホルダ319を所定距離だけ降下させる。レンズホルダ319が最降下位置に達するまでは(ステップS4)、その移動先で撮像処理(ステップS2)を行う。レンズホルダ319が最降下位置に到達したらレンズホルダ319の降下および撮像処理を終了する(ステップS4)。
図28は、上記ステップS2~S4を繰り返し実行するときの撮像視野の移動を例示する図である。原点位置で行う初回の撮像処理では、「No.001」の視野で撮像が行われ、撮像素子23から読み出された撮像信号から「No.001」の視野の画像データが生成される。
この視野「No.001」での撮像処理が済んだ後、ステップS3で指定パルス数でのステッピングモータ61の駆動が行われ、レンズホルダ319が降下すると共に回転し、次の視野は「No.002」となる。そして、「No.002」の視野で撮像が行われ、撮像素子23から読み出された撮像信号から「No.002」の視野の画像データが生成されることになる。
以後、視野を「No.003」→「No.004」→「No.005」・・・と移動させて撮像処理を繰り返す。レンズホルダ319が原点位置から一周したときの撮像視野は図28の「No.011」となり、二周したときの撮像視野は図28の「No.021」となる。
尚、例えばステップS3においてステッピングモータ61に供給されるパルス数を適宜調節し、あるいは送りネジ367のネジピッチを適宜調節するなどして、円周方向に隣接する撮像視野同士の左右の端部が接し、あるいは若干重なる様に、また、軸方向に隣接する撮像視野同士の上下の端部が接し、あるいは若干重なる様にしてもよい。それによれば、軸方向および円周方向に被写体をもれなく撮影でき、隙間のない画像マップを得ることができる。
内視鏡301によれば、駆動部321により対物レンズ17が軸方向および円周方向に移動され、それに伴って視野が軸方向および円周方向に移動する。そのため、上述した内視鏡101のように魚眼レンズを用いずとも、全方位について撮像することができる。
図29~図31に示す電子内視鏡401は、本体部11及び透光性カバー313で構成された外殻を備え、その内部に、透光性カバー313を通して被写体光を集光する対物レンズ17を保持したレンズホルダ419と、外殻内でレンズホルダ419を移動させる駆動部421と、対物レンズ17から取り込まれた被写体光を受光して電気信号に変換する固体撮像素子23と、を備えている。尚、上述した内視鏡1,301と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
レンズホルダ419は、樹脂材などで形成されており、略円盤状に成形された対物レンズ搭載部414と、対物レンズ搭載部414と同径の円筒状に成形された筒状部415とを備えている。筒状部415は、その中心軸が、透光性カバー313の中心軸、換言すれば外殻の中心軸と一致するように配置されており、対物レンズ搭載部414は、筒状部415と同軸となるように筒状部415の先端に設けられている。
対物レンズ搭載部414および筒状部415は、その外径が透光性カバー313の円筒部313cの内径よりも若干小径に成形され、透光性カバー313の中心軸、換言すれば外殻の中心軸に沿って透光性カバー313内をガタツキなくスムースに移動できるようになっている。
筒状部415の内周面には、内歯歯車415aが形成されている。この内歯歯車415aの歯は、筒状部415の中心軸と平行に延び、周方向に等間隔に形成されている。また筒状部415の外周面には、本体部11の内周面に形成されたネジ溝に螺合する雄ネジ415bが形成されている。
対物レンズ搭載部414には、筒状部415の先端開口に連なって筒状部415の軸方向に延びる円柱孔414aが形成されており、この円柱孔414a内に、対物ミラー16が収納されている。さらに、対物レンズ搭載部414には、半径方向に延び、一端はその外周面に開口するとともに、他端は対物ミラー16の反射面を径方向に臨むように円柱孔414aに通じる撮像孔414bが形成されており、この撮像孔414bの外周側開口部に対物レンズ17が設置されている。
被写体光は、透光性カバー313の円筒部313cを通して対物レンズ17により集光され、平行光束として対物ミラー16に向けて進行する。そして、被写体光は、対物ミラー16の反射面で反射され、平行光束のまま、外殻の中心軸と平行に筒状部415の中心軸上を進行するようになっている。
本体部11内において、レンズホルダ419の筒状部415の中心軸の延長線上にあたる位置には、撮像駆動ユニット部37が配置されている。撮像駆動ユニット部37については、上述した内視鏡1と同一であるので、説明を省略する。
ここで、筒状部415を本体部11の内周面に形成されたネジ溝に螺合させたレンズホルダ419は、本体部11の中心軸に沿って、換言すれば外殻の中心軸に沿って移動を案内される。以下に、レンズホルダ419を外殻の中心軸に沿って移動させる駆動部421について、図30を参照しつつ詳細に説明する。
本体部11内にはステッピングモータ61が固定されており、また、ステッピングモータ61のモータギア63とレンズホルダ419の筒状部415に形成された内歯歯車415aとの間に介在して、両者にそれぞれ噛み合うアイドルギア65が設けられている。ステッピングモータ61の回転は、モータギア63、アイドルギア65を介してレンズホルダ419に伝達される。
レンズホルダ419は、筒状部415を本体部11に内嵌させており、よって、ステッピングモータ61の回転が伝達されたレンズホルダ419は、本体部11の中心軸を回転軸として回転する。同時に筒状部415は、その外周面に形成された雄ネジ415bにより本体部11の内周面に形成されたネジ溝に螺合している。そのため、レンズホルダ419は、本体部11の中心軸を回転軸として回転するのに伴い、本体部11の中心軸に沿って移動する。
例えば、レンズホルダ419が図32に示す上昇位置にある状態で、ステッピングモータ61を所定の方向に回転駆動し、モータギア63、アイドルギア65を介してレンズホルダ419を回転させる。これにより、図33に示すように、レンズホルダ419は、本体部11の中心軸を回転軸として回転しながら、本体部11の中心軸に沿ってΔhだけ降下する。レンズホルダ419の回転に伴って対物レンズ17もまた回転され、それにより撮像視野が円周方向に移動する。
内視鏡401の動作は、上述した内視鏡301と同様であり、駆動部421により対物レンズ17を保持したレンズホルダ419を軸方向および円周方向に逐次移動させながら全方位について撮像する。
内視鏡401によれば、レンズホルダ419の移動を案内するにあたって、上述した内視鏡301の送りネジ367に替えて本体部11の内周面を用いており、部品点数の削減を図ることができると共に、本体部11の内周面に案内される筒状部415の内側に撮像駆動ユニット部37等を収納することができ、スペースを有効に利用して内視鏡の小型化を図ることができる。
以上、電子内視鏡1、101、201、301、401を例に説明したとおり、本明細書には、筒状に形成され、その周壁に軸方向に延びる透明な窓部が設けられた外殻と、前記外殻の内部に設けられた固体撮像素子と、前記窓部を通して被写体光を集光する対物レンズを含み、前記固体撮像素子に結像する対物光学系と、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸に沿って移動させる駆動機構と、を備えたことを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記駆動機構が、前記対物レンズを支持するレンズホルダと、前記外殻の軸に沿って延びる送りネジと、前記送りネジを回転駆動するモータと、を備え、前記レンズホルダが、前記送りネジのネジ溝に係合し、且つ前記送りネジを回転軸とした回転を規制されていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記駆動機構が、前記対物レンズを支持するレンズホルダと、前記外殻の軸に沿って延びる送りネジと、前記送りネジを回転軸として前記レンズホルダを回転駆動するモータと、を備え、前記レンズホルダが、前記送りネジのネジ溝に係合していることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記外殻が円筒状に成形され、その内周面にネジ溝が形成されており、前記駆動部が、前記対物レンズを支持するレンズホルダと、前記外殻の軸を回転軸として前記レンズホルダを回転駆動するモータと、を備え、前記レンズホルダが、前記外殻の前記ネジ溝に係合していることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記固体撮像素子から撮像信号を読み出して画像データを生成する制御部と、該画像データを格納するメモリと、を前記外殻内にさらに備えることを特徴とする電子内視鏡が開示されている。
図34~図36に示す電子内視鏡500は、外殻となる本体部511及び透光性カバー513と、本体部511の内部に収納され筒状部515の一端側に広角レンズとなる対物レンズ群517を配置したレンズホルダ519と、透光性カバー513内および本体部511内でレンズホルダ519を対物レンズ群517の光軸方向に移動させる昇降駆動部521と、対物レンズ群517から取り込まれる被写体光を受光して電気信号に変換する撮像素子523と、を備えている。
本体部511は、遮光性を有する樹脂材などで有底円筒形に形成されてなり、底部(図35の下側)511aには筒状の電池収納部511bが設けられ、電源電池525が装着された後に電池収納部511bは電池蓋527によって気密に閉塞されるようになっている。つまり、電源電池525は本体部511に内蔵され、外部から電源供給する必要をなくすことで、本体部に電源供給ケーブルを接続する必要がなくなり、電子内視鏡500自体の取り扱い性を向上している。なお、本体部511は円筒形に限らず、他の筒状、あるいは袋状等の形状であってもよい。
また、底部511aには、図示する例では樹脂製の2本の硬質の配線保護管529が外方へ突出して固定され、この配線保護管529に例えば画像信号等を出力する配線を挿通することが可能となっている。なお、配線保護管529は、内視鏡500を使用する際に、内視鏡500の全体を、被検体となる孔内あるいは体腔内に挿入したり、引き出すための把持管としても利用可能になっている。
本体部511の内周面には、本体部511の長手方向に沿ったリブ531が形成され、レンズホルダ519の鍔部533に形成された係合溝535と係合することで、レンズホルダ519が回転止めされる。
透光性カバー513は、硬質の透明樹脂で成形され、先端側の頂部は、被検体内部への挿入を容易にする滑らかな半球状に成形されている。この半球部513aとは反対側の拡径した開口端部513bと、本体部511の開口端部511cとが整合して互いに接着固定される。透光性カバー513は一体成形により作製する他、半球部513a、開口端部511cが接着により接合された構成としてもよい。また、半球部513aに遮光性を持たせて外光が直接対物レンズ群517に導入されることを防止した構成としてもよい。ここで、透明樹脂とは、特定の波長の光に対して透明であればよく、必ずしも可視光に対して透明でなくてもよい。
透光性カバー513の半球部513aおよび半球部513aから開口端部513bまでの間の円筒部513cは、本体部511の外形と略同径の開口端部513bよりも小さく形成している。このように、半球部513aおよび円筒部513cを細くすることで、狭い被検体の内部へ容易に挿入することができ、電子内視鏡500の利用範囲を拡げることができる。なお、透光性カバー513の円筒部513cは先細りのテーパ形状としてもよく、このようにすると、小さな孔内,体腔内に透光性カバー513の先端を挿入し易くなる。さらに、半球部513aおよび円筒部513cを本体部511の外形と略等しく形成し、開口端部513bと同一径とした構成にすることも可能である。その場合には、先細の先端が無くなり、電子内視鏡500の強度が向上して堅牢性を高められる。
レンズホルダ519は、樹脂材料等からなり、透光性カバー513の内側面に沿った外表面形状に形成してある。筒状部515の一端側に、対物レンズ群(広角レンズ517Aおよびレンズ517B)を固定して、一端側頂部の開口を閉塞している。広角レンズ517Aとしては、好ましくは魚眼レンズが用いられる。この場合の魚眼レンズとしては、円周魚眼レンズが傾斜角(レンズ光軸からの角度)の大きい全周方向の観察に好適に利用できる。すなわち、広角レンズは、対物レンズ群517の光軸方向(筒状部515の中心軸方向)に対して側方全周方向の観察が可能な観察視野を有する広角レンズである。なお、広角レンズ517Aとしては、この他にも対角魚眼レンズ、一般的な広角レンズ等を用いることもできる。レンズホルダ519に固定された対物レンズ群517の光軸は、レンズホルダ519の筒状部515の中心軸方向に一致させている。そして、レンズホルダ519の筒状部515は、外径が透光性カバー513の円筒部513cの内径より若干小径に形成され、筒状部515が透光性カバー513内でガタツキなくスムースに移動できるようになっている。
円筒部513cの中心軸を本体部511の底部511a側に延長した先には、撮像駆動ユニット部537が配置されている。撮像駆動ユニット部537は、本体部511の底部511aに設けた電池収納部511bの周壁部を支柱として、図示しないステー部材を用いて本体部511の内部に固定設置される。撮像駆動ユニット部537は、図示する例では3枚の基板541,542,543を備えている。
図37に撮像駆動ユニット部537を含む一部拡大斜視図を示した。最下層(底部511a側)の基板541にはステッピングモータのドライバ回路等を含む制御ユニット545を設け、中層の基板542には撮像画像データを格納する画像メモリ547を設け、上層の基板543には固体撮像素子であるCCD型イメージセンサやCMOS型イメージセンサ等の撮像素子523を配置している。
円筒部513cの中心軸を含む基板543中心部には、円筒状に形成された集光レンズホルダ549を配置し、この集光レンズホルダ549の内部に撮像素子523を収納している。そして、集光レンズホルダ549の上端開口部に集光レンズ551を配置することで、中心軸に沿って導光される平行光束(被写体光)L1を、撮像素子523の受光面に集光レンズ551によって結像させている。
また、対物レンズ群517と撮像素子523との間の光路途中にハーフミラー553を配置して、発光体としての発光ダイオード(LED)555からの発光光を、このハーフミラー553の反射により対物レンズ群517に向けて照明光L2として照射している。つまり、ハーフミラー553を、集光レンズ551に入射する平行光束の集光レンズ551の直前部分に、平行光束の光軸(円筒部513cの中心軸)に対して斜め45度に傾斜して配置している。そして、ハーフミラー553に対し照明光が平行光束となるように偏向する照明レンズ557を、LED555とハーフミラー553との間に設けている。ハーフミラー553,照明レンズ557,LED555は、それぞれ適宜な支持部材により本体部511内に固定されている。
ここで、対物レンズ群517を配置したレンズホルダ519の筒状部515は、図38A、図38Bに示すように、透光性カバー513内および本体部511内で、対物レンズ群517の光軸方向(筒状部515の中心軸方向)に移動可能となっている。すなわち、図38Aに示す広角レンズ517Aの高さがh1の位置から、図38Bに示す高さhnの位置まで、自在に設定可能となっている。
このレンズホルダ519の移動手段について、図35、図39A、及び図39Bを参照しつつ詳細に説明する。本体部511の内側には図示しないモータ保持部材が設けられ、このモータ保持部材にステッピングモータ561を取り付けてある。ステッピングモータ561の回転軸は筒状部515の中心軸(平行光束の光軸)と平行にされている。このステッピングモータ561の回転軸にはモータギア(平歯車)563が取り付けられ、モータギア563には平歯車のアイドルギア565が噛合する。そして、アイドルギア565は、送りネジ567の一端側に圧入または接着により固定したギア569と噛合することで、ステッピングモータ561の回転力がモータギア563,アイドルギア565,ギア569を介して送りネジ567に伝達される。なお、アイドルギア565の歯数はモータギア563の歯数より多く、ステッピングモータ561の回転速度を減速してアイドルギア565に伝達するようになっている。ここで、送りネジ567を駆動するステッピングモータ561は、パルス駆動されるモータに限らず、エンコーダを有するサーボモータ等の各種モータ、あるいは他の駆動源を用いることができる。
送りネジ567は、図40に一部断面図を示すように、透光性カバー513の開口端部513bのフランジ面に形成された軸穴513dに一端側の先端を挿入し、また、送りネジ567の他端側を、撮像駆動ユニット部537の集光レンズホルダ549の側方に設けた支持アーム571に回転自在に支持させている。したがって、送りネジ567は、ステッピングモータ561の回転により回転駆動される。なお、ステッピングモータ561,モータギア563,アイドルギア565,ギア569は、レンズホルダ519の移動によらずに、本体部511内で同じ高さ位置に留まることになる。
一方、レンズホルダ519の鍔部533には、図39Aに示すレンズホルダ519の上昇位置においてモータギア563,アイドルギア565,ギア569等との干渉を防ぐ開口孔573が穿設されている。そして、送りネジ567に螺合する送りナット575がナット押さえ577を介して鍔部533に固着されている。
上記構成により、送りネジ567と、送りナット575の固定されたレンズホルダ519は、送りネジ567の回転動作によりレンズホルダ519が送りネジ567の軸方向に移動する直線移動機構として機能する。
例えば、図39Aに示すレンズホルダ519の上昇位置からステッピングモータ561を駆動すると、モータギア563,アイドルギア565,ギア569を介して送りネジ567が回転駆動される。送りネジ567が回転駆動されると、これに螺合する送りナット575が送りネジ567に対して相対移動する。これにより、図39Bに示すようにレンズホルダ519を上昇位置から下降させることができる。
図41は、撮像駆動ユニット部537の機能ブロック図である。システム全体を統括制御する制御部(CPU)581には、制御プログラムが格納されると共にワークメモリとしても動作し、図37で説明した基板542に設けられる画像メモリ547を含むメモリ583と、LED555を駆動するLED駆動回路585と、撮像素子523を駆動する撮像素子ドライバ587と、ステッピングモータ561を駆動するモータドライバ589に駆動パルスを供給するパルス発生器591とが接続される。制御部581が画像処理した後の画像データは、本体部511に内蔵された画像メモリ547に格納されることで、電子内視鏡500単体による画像の取得が行え、取り扱い性を向上できる。
また、この内視鏡500には、電源スイッチ593が設けられ、この電源スイッチ593が投入されると、電源電池525からの電力が図示しない配線を通して撮像駆動ユニット部537の各構成部に供給され、撮像動作,駆動動作が後述するように行われる。
電源スイッチ593は、例えば、本体部511の底部511aに設けられ、手操作スイッチがオンオフされる構成としても良い。あるいは、本体部511に磁力に応動するスイッチ端子を内蔵させ、内視鏡500の外部から、磁石を近づけたり離したりすることで、このスイッチ端子をオンオフ操作する構成としても良い。
次に、内視鏡500の動作について説明する。図35,図41に示すように、電源スイッチ593が投入されると、電源電池525から各部に電力が供給されて動作を開始し、ステッピングモータ561が回転駆動される。これにより、レンズホルダ519は、内視鏡500の内部で筒状部515の中心軸方向に進み、原点位置(例えばレンズホルダ519の上昇端位置)で停止する。また、LED555からの発光光が照明レンズ557で平行光とされ、この平行光がハーフミラー553により対物レンズ群517の方向に反射されて、対物レンズ群517を通して筒状部515の中心軸に対して略直交する方向(被検体への挿入方向に対する側面方向)の全周にわたって照射され、照明光となる。
被写体からの反射光は対物レンズ群517を通して内視鏡500内に取り込まれ、被写体の光像は、平行光束のまま集光レンズ551まで進み、この集光レンズ551によって撮像素子523の受光面上に結像される。ここで、図42に対物レンズ群517による視野範囲Wの様子を示した。広角レンズ517Aから出射される照明光は、視野範囲Wで示す範囲に照射される。この照明光による被写体からの反射光は、視野範囲Wに入射された光が撮像素子523に結像されて取り込まれる。なお、広角レンズ517Aの光軸中央部には、視野範囲Wの上端を決定する遮光マスクMを設けてある。ここでは、広角レンズ517Aの外側表面(光出射側表面)に、半径を視野範囲Wに応じて設定した円形状の遮光マスクMを設けている。
撮像素子523で撮像された被写体の撮像信号は、制御部(CPU)581に入力され画像処理され、例えばJPEG画像データとしてメモリ583(画像メモリ547)に格納される。
図43は、メモリ583に格納されている制御プログラムの処理手順を示すフローチャートである。電源スイッチ593が投入されると、この制御プログラムが立ち上がり、先ず、ステッピングモータ561が駆動されて、レンズホルダ519を原点位置(上昇端位置)の方向に移動する(S1)。原点位置とは、例えば図34、図38Aに示すように、対物レンズ群517の位置が内視鏡500の先端側となる位置とするが、これに限らず、先端側とは反対の基端側(図38Bに示すレンズホルダの位置)であってもよい。
レンズホルダ519が原点位置に到達した後、撮像処理を行う(S2)。撮像処理とは、LED555を点灯して対物レンズ群517から照明光を照射し、被写体から反射した光を対物レンズ群517から内視鏡500内に取り込み、撮像素子523の受光面に結像させる処理と、撮像素子523から撮像信号を生成させ、この被写体の撮像信号を画像処理してメモリ583(画像メモリ547)に格納する処理とを含む。
次に、指定したパルス数だけステッピングモータ561を駆動し(S3)、レンズホルダ519を所定距離だけ下降させる。所定距離とは、図42に示す視野範囲Wがレンズホルダ519の可動範囲を段だら状に埋めるように、レンズホルダ519をステップ移動させる距離であり、例えば、透光性カバー513の円筒部513cにおいて視野範囲Wに含まれる部分の高さLaとすることができる。
移動先がレンズホルダ519の最下降位置に達するまでは(S4)、その移動先で撮像処理(S2)を行う。S2およびS3を繰り返し行って、図44に示すような画像マップを各回の撮像画像を合成することで生成する(S5)。つまり、初回の撮像画像データIMG(1)は、対物レンズ群517の広角レンズ517Aの高さが図38Aに示す高さh1の位置にあるときの全周方向(円周角0°~360°)の視野範囲W1の画像データであり、2回目の撮像画像データIMG(2)は、広角レンズ517Aが高さh1の位置からレンズホルダ519とともに所定距離降下された高さh2の位置にあるときの全周方向の視野範囲W2の画像データである。このようにレンズホルダ519を移動させて各移動位置で得た複数枚の撮像画像データIMG(1)~(n)を、高さ方向に相互に結合することで、実質的に一枚の画像データ(画像マップ)にする。なお、一回の撮影分の視野範囲の一部が次回撮影分の視野範囲と重なるようにすると、画像同士の接続領域がもれなく撮影でき、隙間のない画像データを得ることができる。
上記の撮像画像データIMG(1)~(n)による画像マップを作成した後は、この画像マップの格納されたメモリ583(図41参照)から、蓄積されたデータを外部に読み出すことになる。この読み出しは、無線を用いて行っても良く、また、図34に示す配線保護管529内に挿通した配線を用いて読み出しても良い。あるいは、メモリ583を内視鏡500から取り出し可能に設けておき、取り出したメモリ583を別置のパーソナルコンピュータで読むようにしても良い。
また、内視鏡500は、撮像画像データを外部モニタに送り、外部モニタで撮像画像をオンラインで観察できるようにし、更に、外部から操作指示を入力する構成にもできる。その場合には、制御部581は画像処理を行うことなく、撮像素子523から取得した撮像信号をそのまま外部のビデオプロセッサに送り、ビデオプロセッサが画像処理した被写体画像を外部モニタに表示する。外部のビデオプロセッサや外部モニタと制御部581との間の通信は、有線でも無線でも良い。有線で通信を行う場合には、配線中に電源線を入れることで、外部電源を利用することも可能となる。
また、他の制御プログラム例として、図43のフローチャートに示す制御手順の他に、外部からの操作指示に従って、例えば対物レンズ群517による視野範囲を、任意の位置に移動させる制御プログラムを用いてもよい。この場合には、撮像目的に応じて所望の部位を選択的に撮像することができ、注目したい部位をより詳細に観察することが可能となる。
以上、電子内視鏡500を例に説明したとおり、本明細書には、被検体の内部に挿入して被検体内を撮像する電子内視鏡であって、筒状部を有するレンズホルダと、前記レンズホルダに装着され、前記筒状部の一端側に、該筒状部の中心軸に光軸を合わせて配置し、前記筒状部の側方まで観察視野が広がる広角レンズと、前記広角レンズから取り込まれる光を受光し電気信号に変換する撮像素子と、前記筒状部の一端側を覆い、少なくとも前記広角レンズの観察視野内に対面する部位が透光性を有する透光性カバーと、前記筒状部の他端側で前記透光性カバーと接続される筒状の本体部と、前記本体部内に配置され前記レンズホルダを前記中心軸方向に進退させる駆動部と、を備えたことを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、透光性カバー内のレンズホルダが駆動部によって進退移動することで、レンズホルダの筒状部の中心軸上で異なる位置から撮像が可能となり、広角レンズから取り込まれる画像情報を、レンズホルダの移動範囲内で精度良く取得することができる。これにより、電子内視鏡を被検体内で移動させることなく、広範囲の連続した画像を簡単に取得することができる。
また、本明細書には、前記撮像素子が、前記被検体への挿入方向の側方全周からの光を受光することを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、被検体への挿入方向の側方全周分の画像情報を取り込むことで、この画像情報を合成して、一枚の側方全周画像を簡単に生成することができる。
また、本明細書には、前記広角レンズが円周魚眼レンズであることを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、円周魚眼レンズを用いることで、広角レンズの光軸の側方全周の画像が効率良く得られ、しかも、被検体の観察表面に対して略垂直方向からの撮像が可能となる。
また、本明細書には前記広角レンズと前記撮像素子との間の光路途中に配置したハーフミラーと、発光した照明光を前記ハーフミラーの反射により前記広角レンズへ照射することで被検体を照明する発光体と、を備えることを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、発光体からの発光光がハーフミラーにより被検体の方向に反射して、これが被検体の側方全周を照らす照明光となる。
また、本明細書には、前記レンズホルダの筒状部、および前記透光性カバーの前記筒状部を覆う先端部が、前記本体部より細径に形成されたことを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、本体部よりも細径にされた先端部から画像情報を取得するので、被検体の狭い領域に対しても挿入が容易になり、被検体内を観察することができる。もって電子内視鏡の適用可能範囲を拡げることができる。
また、本明細書には、前記駆動部が、前記本体部内で前記広角レンズの光軸方向と平行に回転自在に支持された送りネジと、該送りネジに螺合して前記レンズホルダに固着された送りナットと、前記送りネジを回転駆動するモータと、を有することを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、モータにより送りネジを回転駆動することで、送りネジに螺合した送りナットが送りネジの軸方向に移動して、これによりレンズホルダを広角レンズの光軸方向と平行に進退移動させることができる。
また、本明細書には、前記撮像素子が撮像して得た画像信号を画像処理する制御部と、該制御部が画像処理した画像データを格納する画像メモリと、を前記本体部に内蔵することを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、制御部が画像処理した後の画像データを、本体部に内蔵された画像メモリに格納することで、電子内視鏡単体による画像の取得が行え、取り扱い性を向上できる。
また、本明細書には、前記撮像素子及び前記駆動部に電力を供給する電源電池を、前記本体部に内蔵することを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、電源電池が本体部に内蔵されることで、外部から電源供給する必要がなく、従って本体部外から電源供給ケーブルを接続する必要がなくなり、取り扱い性を向上できる。
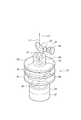
図45に示す電子内視鏡601は、側視型ということができ、また、硬性型である。この電子内視鏡601は、外殻となる本体部602及び透明カプセル部(透光性カバー)603と、内部に収納される移動レンズ枠部(レンズホルダ)604及び後述の撮像駆動ユニット部605とを備えて構成される。
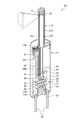
図46は、電子内視鏡601の分解斜視図であり、図47は、電子内視鏡601の縦断面図である。
本体部602は、樹脂材などで有底円筒形に形成されて成り、底部(図46の下側)602aには筒状の電池収納部602bが設けられ、電源電池611が装着された後に電池収納部602bは電池蓋612によって気密に閉塞される様になっている。つまり、電子内視鏡601は、電源電池611を内蔵しており、外部からの電力供給を要しない。そのため、電子内視鏡601は、電力供給用のケーブルが接続される必要はなく、取り扱い性に優れる。
また、底部602aには、図示する例では樹脂製の2本の硬質の把持管613,614が外部に対して突設固定され、この把持管613,614を持って操作することで、電子内視鏡601の全体を、被検体となる孔内あるいは体腔内に挿入し引き出すことが可能になっている。把持管613,614内に、配線を挿通して電子内視鏡601を使用する場合もある。
本体部602の内周面には、本体部602の軸を中心とする精密な雌ネジ602cが刻設されており、雄ネジが形成された移動レンズ枠部604が螺合し回転することで、該部材604は、軸方向に進退する様になっている。
透明カプセル部603は、硬質の透明樹脂で成形された円筒体でなり、一端側(先端側)は半球状に成形され、この半球部603aとは反対側の開口端部603bと、本体部602の開口端部602dとが整合して接着固定される。図示する例では、カプセル部603全体が透明樹脂で形成されているが、円筒部603cの少なくとも観察窓となる部分が透明であればよく、半球部603aは、不透明であってもよい。観察窓とは、後述する対物レンズ617が移動レンズ枠部の回転,移動に伴って対面する部分である。また、半球部603aと円筒部603cとを同一の材料で一体形成せずに別体で形成し一体に接合する構造でもよい。なお、透明樹脂は、例えば赤外光等の特定の波長の光に対して透明であればよく、必ずしも可視光に対して透明でなくてもよい。
半球部603aを図示するより更に小径に形成し、透明カプセル部603の円筒部603cの先端部をテーパ形状に絞ってから滑らかに半球部603aに連設する様に構成しても良い。この様にすると、より小さな孔内,体腔内にも透明カプセル部603の先端部を案内し挿入し易くなる。透明カプセル部603の円筒部603cの外径と本体部602の外径とを全く同一寸法にしているため、両者間に段差は生じない。
移動レンズ枠部604は、樹脂材を円盤状に形成した対物レンズ搭載部604aと、該対物レンズ搭載部604aと略同径の円筒状部材604bとを備え、円筒状部材604bの上部(電子内視鏡601の先端方向)開口端に対物レンズ搭載部604aが一体となるように接着固定され、該開口端が閉塞される。対物レンズ搭載部604aの外径は、透明カプセル部603の内径より若干小径に形成され、対物レンズ搭載部604aが透明カプセル部603内でガタツキなくスムースに移動できるようになっている。
円筒状部材604bの外周面には、本体部602の内周面に刻設された雌ネジ602cに螺合する精密な雄ネジ604cが、円筒状部材604bの軸方向全長に渡って刻設されており、また、円筒状部材604bの内周面には内歯歯車604dが形成されている。この内歯歯車604dは、軸に平行な歯で且つ円筒状部材604bの軸方向全長に渡る歯が周方向に等間隔に形成されてなる。
対物レンズ搭載部604aの中心軸部分には、上端方向(電子内視鏡601の先端方向)に底部を有する円柱孔604eが穿孔されており、この円柱孔604e内に、対物ミラー616が収納されている。対物ミラー616は円柱状ガラス体を斜め45度で切断した形状を持ち、この斜め45度の切断面に、反射膜が製膜されている。
対物レンズ搭載部604aには、円盤状部材の半径方向に直状に延びる撮像用の撮像孔604fが穿孔され、撮像孔604fの一端は対物レンズ搭載部604aの外周側面に開口され、この開口部に凹レンズでなる対物レンズ617が設けられる。撮像孔604fの他端は円柱孔604eに開口しており、対物レンズ617を通して孔604f内に入射した被写体光は、平行光束として進み、対物ミラー616の上記斜め45度の反射面で反射し、平行光束のまま円筒状部材604bの中心軸に沿って進む様になっている。
尚、図47では、撮像孔604f内及び上記の平行光束を明示するために、平行光束の向こう側に見える内歯歯車604dの歯の図示は省略しており、平行光束を白抜き部分で示している。
撮像駆動ユニット部605は、本体部602の底部602aに設けられている電池収納部602bの周壁部を支柱として、図示しないステー部材を用い本体部602の内部に固定設置される。撮像駆動ユニット部605は、図示する例では3枚の基板621,622,623を備える。
最下層(底部602a側)の基板621にはステッピングモータのドライバ回路等を含む制御ユニット625が設けられ、中層の基板622には撮像画像データを格納する画像メモリ626が設けられ、上層の基板623は、CCD型イメージセンサやCMOS型イメージセンサ等の固体撮像素子627と、ステッピングモータ628が設置される。
基板623の中心部には、円筒状に形成されたレンズホルダ629が設けられ、この内部に固体撮像素子627が収納される。そして、レンズホルダ629の上端開口部に集光レンズ630が設置され、中心軸に沿って入射して来る上記の平行光束(被写体光)が、固体撮像素子627の受光面に集光レンズ630によって結像される。
さらに図48を参照して、集光レンズ630に入射する平行光束の、集光レンズ630の直前部分に、平行光束の光軸(=円筒状部材604bの中心軸)に対し傾斜して置かれたハーフミラー631が設けられる。図示の例では、ハーフミラー631は、その反射面が平行光束の光軸に対して45度傾斜して配置されているが、反射面が光軸に直交しない範囲で傾斜角は任意である。このハーフミラー631は、一部の入射光は透過させ、残余の入射光は反射する光学部材であり、透過と反射との割合は適宜設定可能である。そして、ハーフミラー631に向けて照明光を発するLED633と、ハーフミラー631とLED633との間に介在し、入射したLED633の照明光を平行光束としてハーフミラー631に射出する照明レンズ632とが設けられる。ハーフミラー631、照明レンズ632、LED633は、基板623に固定される。
基板623の周辺部にはステッピングモータ628が固設され、このステッピングモータ628の回転軸にモータギア(平歯車)636が取り付けられる。ステッピングモータ628の回転軸は円筒状部材604bの中心軸(=平行光束の光軸)と平行に設けられており、モータギア636には平歯車のアイドルギア637が噛合される。
アイドルギア637の回転軸は基板623に対して垂直に回転自在に軸支されており、アイドルギア637の歯数はモータギア636の歯数より多くなっている。このため、ステッピングモータ628の回転速度は減速されてアイドルギア637に伝達される。アイドルギア637は、円筒状部材604bの内周面に設けられた内歯歯車604dに噛合される。
ステッピングモータ628が回転すると、アイドルギア637が回転し、これに伴って円筒状部材604bが回転する。円筒状部材604bが回転すると、その回転方向により、移動レンズ枠部604の円筒状部材604bが、本体部602の内部に螺入し或いは内部から螺出することになり、軸方向に進退する。
この電子内視鏡601には、図示しない電源スイッチが設けられ、この電源スイッチが投入されると、電源電池611からの電力が図示しない配線を通して撮像駆動ユニット部605の各構成部に供給され、撮像動作,駆動動作が後述するように行われる。
電源スイッチは、例えば、本体部602の底部602aに設けられ、手操作スイッチがオンオフされる構成としても良い。あるいは、本体部602に磁力に応動するスイッチ端子を内蔵させ、電子内視鏡601の外部から、磁石を近づけたり離したりすることで、このスイッチ端子をオンオフ操作する構成としても良い。
図49は、撮像駆動ユニット部605の機能ブロック図である。システム全体を統括制御するCPU641には、制御プログラムが格納されると共にワークメモリとしても動作する制御メモリ642と、図47で説明した基板622に設けられる画像メモリ626と、LED633を駆動するLED駆動回路643と、撮像素子627を駆動する撮像素子ドライバ644と、ステッピングモータ628を駆動するモータドライバ645に駆動パルスを供給するパルス発生器646とが接続される。
電源スイッチ647が投入されると、電源電池611から各部に電力が供給されて動作を開始し、モータ628が回転駆動される。これにより、移動レンズ枠部604は、電子内視鏡601の内部で回転し、且つ軸方向に進退する。
図47および図48を参照して、LED633からの照明光は、照明レンズ632で平行光束とされてハーフミラー631に入射し、対物ミラー616に向けて反射される。対物ミラー616に入射した照明光は、平行光束のまま対物レンズ617に向けて反射される。そして、対物レンズ617に入射した照明光は、対物レンズ617を通して被写体方向に照射され、対物レンズ617の視野範囲に収められる被写体を照明する照明光となる。すなわち、照明レンズ632、ハーフミラー631、対物ミラー616、対物レンズ617により照明光学系が構成されている。
照明光は被写体で反射され、一部は被写体光として対物レンズ617に入射する。対物レンズ617に入射した被写体光は、平行光束となって対物ミラー616に進み、対物ミラー616で反射され、平行光束のままハーフミラー631を透過して集光レンズ630まで進む。そして、被写体光は、この集光レンズ630によって撮像素子627の受光面上に結像される。すなわち、対物レンズ617、対物ミラー616、ハーフミラー631、および集光レンズ630により対物光学系が構成されている。
このように、対物光学系と照明光学系とで、ハーフミラー631から対物レンズ617の区間の光路が共用されており、LED633から発せられた照明光は、対物光学系における被写体光の光路を逆に辿って対物レンズ617に入射し、そして被写体に向けて照射される。そのため、対物レンズ617の視野範囲に収められる被写体が確実に照明される。
尚、内視鏡601では、LED633が、ハーフミラー631で反射される被写体光の反射光路上に配置され、固体撮像素子627が、ハーフミラー631を透過する被写体光の透過光路上に配置されているが、これに制限されるものではない。LED633を透過光路上に配置し、固体撮像素子627を反射光路上に配置するようにしてもよい。
撮像素子627で撮像された被写体の撮像信号は、CPU641に取り込まれて画像処理され、例えばJPEG画像データとして画像メモリ626に格納される。
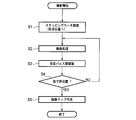
図50は、制御メモリ642に格納されている制御プログラムの処理手順を示すフローチャートである。電源スイッチ647が投入されると、この制御プログラムが立ち上げられ、先ず、ステッピングモータ628が原点側に駆動される(ステップS1)。原点側とは、例えば図47に示す状態すなわち対物レンズ617の位置が電子内視鏡601の先端側となる方向である。
内視鏡601では、コスト削減のために、ステッピングモータ628が原点に達したか否かを検出するセンサを設けていないので、次のステップS2で、所定時間を計数するタイマがカウントアップしたか否かを判定し、所定時間が経過しない間はステップS1を繰り返し実行する。原点に達したことを検出するセンサを設けていれば、このセンサの原点検出までステップS1を繰り返し実行すれば良い。
所定時間とは、ステッピングモータ628が原点に達するに要する一番長い時間とすれば良い。例えば、図52に示す状態は、移動レンズ枠部604が回転して最下位位置まで移動した状態を示しており、この状態から、ステッピングモータ628の回転によって移動レンズ枠部604が回転して図47に示す原点位置(移動レンズ枠部604が半球部603aの内周面に当接しそれ以上その方向に移動できない位置)に達するまでの時間とすれば良い。
これにより、移動レンズ枠部604が、図47の状態と図52の状態(円筒状部材604bの下端部が本体部602の底部602aに当接する状態)との間のいずれの中間位置の状態であっても、ステッピングモータ628を原点位置方向に所定時間だけ駆動すれば、必ず、対物レンズ617は原点位置となる。
タイマが所定時間を計数した場合には、ステップS2からステップS3に進み、後述するカウンタの内容を0クリアする。そして、ステップS4に進み、撮像処理を行う。撮像処理とは、LED633を点灯して対物レンズ617から照明光を照射し、被写体から反射した光を対物レンズ617から電子内視鏡601内に取り込み、撮像素子627の受光面に被写体からの入射光を結像させる。
そして、CPU641は、撮像素子ドライバ644を介して撮像素子627を駆動し、撮像素子627から得られた被写体の撮像信号を撮像素子627から取り込み、画像処理して画像メモリ626に格納する。
次のステップS5では、指定パルス数だけステッピングモータ628を駆動し、次のステップS6ではカウンタの計数値にこの指定パルス数だけ加算し、次のステップS7では、カウンタの合計計数値を指定数を比較する。
そして、カウンタの合計計数値が指定数に達していない場合には、ステップS7からステップS4に戻って撮像処理を行い、以後、ステップS4~S7の処理ループを繰り返し実行する。カウンタの合計計数値が指定数達したときは、この図50の処理を終了する。
図53は、図50のステップS4を繰り返し実行するときの対物レンズ617の撮像視野の移動を例示する図である。原点位置で行う初回の撮像処理では、図53の「No.001」で示す視野の被写体画像を撮像素子627から取得する。
この視野「No.001」の被写体画像を撮像した後には、ステップS5で指定パルス数のステッピングモータ628の駆動が行われるため、円筒状部材604bは指定パルス数だけ回転する。これにより、円筒状部材604bは本体部602内に螺入して引っ込むことになり、次の視野は、図53の「No.002」となり、この視野の被写体画像を撮像し、画像データを画像メモリ626に蓄積することになる。
以後、視野をNo.003→No.004→No.005……と移動させて撮像処理と画像データのメモリ626への蓄積を繰り返す。図51は、図47の状態に比較して、移動レンズ枠部604を透明カプセル603内で半周させた状態を示している。移動レンズ枠部604が透明カプセル部603内で原点位置から一周(一回転)し終わったときの撮像視野は図53のNo.011となり、二周(二回転)し終わったときの撮像視野は図53のNo.021となる。
また、図52は、円筒状部材604bの下端が本体部602の底部602aに当接しそれ以上その方向に移動できない状態を示しており、図52に示す状態に達したとき、撮影処理(ステップS4)を繰り返す処理ループの終了となる。即ち、図50のステップS7で用いる「指定数」は、原点位置から図52の状態に達するまでの合計パルス数である。
図53に例示した個々の撮像視野の移動例では、レンズホルダとなる移動レンズ枠部604の回転方向で、隣接する撮像視野同士の左右の端部が接する様に、あるいは若干重なる様に、図50のステップS5の指定パルス数が設定されている。また、本体部602の内周面と円筒状部材604bの外周面に設けられた螺条のピッチは、回転軸方向に隣接する撮像視野同士の上下の端部が接する様に、あるいは若干重なる様に設計されている。
これにより、観察対象となる円筒状の被写体内周面の視野全域の状態を、漏れなく撮像し画像データとして取得することが可能となる。勿論、個々の撮像視野が大きく重なる様に、ステッピングモータのパルス数を設定したりネジ602c,604cのピッチを設計しても良いことはいうまでもない。
電子内視鏡601による撮像が終了した後は、図49の画像メモリ626内の蓄積データを外部に読み出すことになる。この読み出しは、無線を用いて行っても良く、また、図45に示す把持管613,614内に挿通した配線を用いて読み出しても良い。あるいは、画像メモリ626を電子内視鏡601から取り出し可能に設けておき、取り出した画像メモリ626を別置のパーソナルコンピュータで読むようにしても良い。
図54は、撮像駆動ユニット部605の変形例に係る機能ブロック図である。図49の撮像駆動ユニット部605との違いは、撮像画像データを外部モニタに送り、外部モニタで撮像画像をオンラインで観察できるようにし、更に、外部から操作指示を入力できる様にした点だけである。
この場合、CPU641は、画像処理を行うことなく、撮像素子627から取得した撮像信号をそのまま外部のビデオプロセッサに送り、ビデオプロセッサが画像処理した被写体画像を外部モニタに表示する構成としても良い。外部のビデオプロセッサや外部モニタとCPU641との間の通信は、有線でも無線でも良い。有線で通信を行う場合には、配線中に電源線を入れることで、外部電源を利用することも可能となる。
また、制御プログラムとして、図50の制御プログラムの他に、外部からの操作指示に従って、例えば対物レンズ617の視野位置を、図53の任意の撮像視野位置に移動させる制御プログラムを搭載するのが良い。
尚、上述した内視鏡601では、移動レンズ枠部604の回転駆動をステッピングモータ628で行ったが、ステッピングモータでなくても、回転角や回転長さを精度良く制御できるモータであれば良いことはいうまでもない。
以上、電子内視鏡601を例に説明したとおり、本明細書には、少なくとも円筒部の観察窓が透明である透光性カバーと、該透光性カバーの前記円筒部に連設される円筒部を有する本体部と、前記透光性カバー及び前記本体部の内部で該透光性カバーの中心軸を中心に回転すると共に該中心軸の方向に移動するレンズホルダと、該レンズホルダに設けられ前記透光性カバーの前記円筒部に対面する位置に設けられた対物レンズを通して入射する光を前記本体部の方向に反射する対物ミラーと、該対物ミラーで反射された光を受光し電気信号に変換する撮像素子と、前記本体部の内部に設けられ前記レンズホルダを回転駆動すると共に前記中心軸方向に駆動する駆動部とを備えることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記レンズホルダは、前記対物レンズが搭載され且つ前記対物ミラーが搭載された円盤状部材と、該円盤状部材の前記本体部側に一体に連設される円筒状部材とを備えることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記本体部の内周面に螺刻された雌ネジと、前記円筒状部材の外周面に螺刻され前記雌ネジと螺合する雄ネジであって前記駆動部により前記円筒状部材が回転駆動されたとき該円筒状部材を前記中心軸方向に移動させる雄ネジとを備えることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記対物レンズの光軸は前記レンズホルダの回転軸に対して垂直方向に設けられていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記対物ミラーは、前記対物レンズを通して入射する光を前記中心軸を通る光路で前記本体部の方向に反射することを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記対物ミラーで反射される光の光路途中に設けられるハーフミラーと、照明光を発光させ該照明光を前記ハーフミラーで反射させ前記対物ミラーで反射させることで前記対物レンズを通し被写体を照明する発光体とを備えることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記撮像素子が撮像して得た画像信号を画像処理する制御部と、該制御部が画像処理した撮像データを格納する画像メモリとを内蔵することを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記撮像素子及び前記駆動部に電力を供給する電源電池を収納する電池収納部を前記本体部に備えることを特徴とする電子内視鏡が開示されている。
図55~図57に示す電子内視鏡701は、外殻となる本体部602及び透明カプセル部603と、内部に収納される移動レンズ枠部604及び撮像駆動ユニット部605とを備えて構成される。尚、上述した内視鏡601と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
内視鏡701は、本体部602の底部602aに突設固定された2本の把持管613、614の間に樹脂製の硬質の把持板715が架け渡されている。2本の把持管613、614および把持板715は、外殻の軸まわりに該外殻を回転させるための操作部を構成している。2本の把持管613、614は外殻の軸に関して略対称に設けられており、把持管613、614を互いに撚り合わせるように把持板715を捻ることで、把持管613、614を介して外殻の軸まわりのトルクを該外殻に作用させることができる。尚、操作部の構成は、外殻の軸まわりのトルクを該外殻に作用させることができるものであればよい。
内視鏡701は、上述した内視鏡601と同様に、ステッピングモータ628を指定パルス数駆動して移動レンズ枠部604を電子内視鏡701の内部で回転し、且つ軸方向に進退させ、視野を図53に示すNo.001→No.002→No.003・・・と移動させながら撮像処理と画像データのメモリ626への蓄積を繰り返して撮像する。
内視鏡701による撮像が終了した後は、画像メモリ626内の蓄積データを外部に読み出すことになる。そして、読み出されたデータから生成された画像に疾患あるいは傷などの異常が認められる場合、当該画像データが取得された撮像部位が特定される必要がある。そこで、把持管613,614および把持板715で構成される操作部を操作して、撮像に際し、被検体の孔に対する内視鏡701の外殻の軸まわりの該外殻の姿勢角を所定の角に設定しておく。
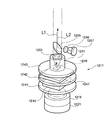
例えば、移動レンズ枠部604が図57に示す原点位置にある状態で、内視鏡701の視野は2本の把持管613、614の並びに沿って一方の把持管613側に向けられている。そこで、図58に示すように、被検体の孔の開口縁に任意に設定される基準点Pと内視鏡701の筐体の軸Oとを結ぶ線分L3、軸Oと把持管613とを結ぶ線分L4として、線分L3と線分L4とのなす角(姿勢角)θを所定の角度に設定しておく。この姿勢角θ、画像データの撮像順、そして所定の撮像間隔での軸方向および周方向への視野の変位量から、画像データが取得された撮像部位が特定される。
以上、電子内視鏡701を例に説明したとおり、本明細書には、孔に挿入され、該孔の内周面を撮像する電子内視鏡であって、円筒状に形成され、その周壁に軸方向に延びる透明な窓部が設けられた外殻と、前記外殻の内部に設けられた固体撮像素子と、前記窓部を通して被写体光を集光する対物レンズを含み、前記固体撮像素子に結像する対物光学系と、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸に沿って移動させる駆動機構と、を備え、前記孔の開口に臨む前記外殻の底部に、該外殻の軸まわりに該外殻を回転させるための操作部が設けられていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記窓部は、前記外殻の全周にわたって設けられており、前記駆動機構が、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸を回転軸として回転させながら該外殻の軸に沿って移動させることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記操作部が、前記外殻の底部から突出した状態に設けられる板部材を含み、前記板部材が、前記外殻の軸上に配置されていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、電子内視鏡を孔に挿入し、前記孔の開口に臨む前記外殻の底部に設けられた操作部を操作して、前記孔に対する前記外殻の軸まわりの該外殻の姿勢角を所定の角度に設定し、前記駆動機構により前記対物レンズを前記外殻の軸に沿って移動させながら前記孔の内周面を撮像することを特徴とする撮像方法が開示されている。
また、本明細書には、前記窓部は、前記外殻の全周にわたって設けられており、前記駆動機構が、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸を回転軸として回転させながら該外殻の軸に沿って移動させることを特徴とする撮像方法が開示されている。
図59及び図60に示す電子内視鏡801は、本体部602及び透明カプセル部603を有する外殻と、この外殻の内部に収納される移動レンズ枠部604及び撮像駆動ユニット部605とを備えている。尚、上述した内視鏡601と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
内視鏡801には、電源スイッチ847が設けられており、電源スイッチ847は、図61に示すように、内視鏡801が被検体の孔に挿入された状態で、孔の外から操作可能である。図示の例では、電源スイッチ847は手操作によりオンオフされる構成となっており、孔の開口に臨む本体部602の底部602aに設けられている。尚、底部602aに形成された電池収納部602bの開口部に嵌め込まれて底部602aの一部を構成する電池蓋612に設けられてもよい。また、電源スイッチの他の構成例として、本体部602から孔の外までリモートコードを導出し、その端部にオンオフ操作する操作部を設ける構成としても良い。また、電源スイッチの他の構成例として、本体部602に磁力に応動するスイッチ端子を内蔵させ、孔の外から、本体部602に磁石を近づけたり離したりすることで、このスイッチ端子をオンオフ操作する構成としても良い。
電源スイッチ847が投入されると、図62に示すように、電源電池611からの電力が図示しない配線を通して撮像駆動ユニット部605の各構成部に供給され、上述した内視鏡601と同様に撮像動作,駆動動作が行われる。
以上、電子内視鏡801を例に説明したとおり、本明細書には、孔に挿入され、該孔の内周面を撮像する内視鏡であって、円筒状に形成され、その周壁に軸方向に延びる透明な窓部が設けられた外殻と、前記外殻の内部に設けられた固体撮像素子と、前記窓部を通して被写体光を集光する対物レンズを含み、前記固体撮像素子に結像する対物光学系と、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸に沿って移動させる駆動機構と、前記固体撮像素子および前記駆動機構を制御する制御部と、前記制御部を作動させる操作スイッチと、を備え、前記孔に挿入された状態で、前記操作スイッチが該孔の外から操作可能であることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記操作スイッチが、前記孔の挿入開口に臨む前記外殻の底部に設けられていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記窓部は、前記外殻の周壁に全周にわたって設けられており、前記駆動機構が、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸を回転軸として回転させながら該外殻の軸に沿って移動させることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記外殻が円筒状に成形され、その周壁の内周面にネジ溝が形成されており、前記駆動機構が、前記対物レンズを支持するレンズホルダと、前記外殻の軸を回転軸として前記レンズホルダを回転駆動するモータを備え、前記レンズホルダが、前記外殻の前記ネジ溝に係合していることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記制御部が、前記固体撮像素子から撮像信号を読み出して画像データを生成し、前記画像データを格納するメモリを前記外殻内にさらに備えたことを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記駆動機構が、電力により動作し、前記固体撮像素子および前記駆動機構ならびに前記制御部に電力を供給する電源電池を、前記外殻内にさらに備えたことを特徴とする電子内視鏡が開示されている。
図63に示す電子内視鏡901は、上述した電子内視鏡601における対物ミラー616に替えて、対物レンズ搭載部604aの円柱孔604eにハーフミラー931が配置され、ハーフミラー931の背後に照明レンズ932およびLED933が設けられている。尚、上述した内視鏡601と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
上述した内視鏡601では、LED633が、ハーフミラー631で反射される被写体光の反射光路上に配置され、固体撮像素子627が、ハーフミラー631を透過する被写体光の透過光路上に配置されている。これに対して、内視鏡901では、LED933が、ハーフミラー931を透過する被写体光の透過光路上に配置され、固体撮像素子627が、ハーフミラー931で反射される被写体光の反射光路上に配置されることとなる。かかる構成によっても対物レンズ617を通して照明光を被写体に照射することができる。
以上、電子内視鏡601、901を例に説明したとおり、本明細書には、筒状に形成され、その周壁に軸方向に延びる透明な窓部が設けられた外殻と、前記外殻の内部に設けられた光源および固体撮像素子と、前記窓部を通して前記光源の照明光を被写体に照射する照明光学系と、前記窓部を通して被写体光を集光する対物レンズを含み、前記固体撮像素子に結像する対物光学系と、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸に沿って移動させる駆動機構と、を備え、前記照明光学系が、前記対物レンズを通して前記照明光を前記被写体に照射することを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記照明光学系が、ハーフミラーを含んでおり、前記ハーフミラーが、前記対物光学系における前記被写体光の光軸に対して傾斜して該被写体光の光路上に配置され、前記光源が、前記ハーフミラーを透過する前記被写体光の透過光路上、または前記ハーフミラーで反射される前記被写体光の反射光路上のいずれか一方に配置され、前記固体撮像素子が、前記透過光路上または前記反射光路上のいずれか他方に配置されていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記窓部は、前記外殻の周壁に全周にわたって設けられており、前記駆動機構が、前記対物光学系の少なくとも前記対物レンズを前記外殻の軸を回転軸として回転させながら該外殻の軸に沿って移動させることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記外殻が円筒状に成形され、その周壁の内周面にネジ溝が形成されており、前記駆動機構が、前記対物レンズを支持するレンズホルダと、前記外殻の軸を回転軸として前記レンズホルダを回転駆動するモータと、を備え、前記レンズホルダが、前記外殻の前記ネジ溝に係合していることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記固体撮像素子から撮像信号を読み出して画像データを生成する制御部と、該画像データを格納するメモリと、を前記外殻内にさらに備えたことを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記駆動機構が、電力により動作し、前記固体撮像素子及び前記駆動機構に電力を供給する電源電池を、前記外殻内にさらに備えたことを特徴とする電子内視鏡が開示されている。
図64~図66に示す電子内視鏡1001は、本体部602及び透明カプセル部603で構成された外殻と、この外殻の内部に収納される移動レンズ枠部604及び撮像駆動ユニット部605とを備えている。尚、上述した内視鏡601と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
そして、上述した内視鏡601におけるLED633と、照明レンズ632、ハーフミラー631、対物ミラー616、及び対物レンズ617により構成された照明光学系とに替えて、内視鏡1001は、移動レンズ枠部604の対物レンズ搭載部604aの上部に、照明光を発する発光ダイオード(LED)1033と、LED1033の照明光を集光して被写体に照射する照明レンズ1032と、LED1033に電力を供給する電池1034とが搭載されている。
照明光の照射口となる照明レンズ1032は、対物レンズ617の上方にあって、そのレンズ光軸が対物レンズ617のレンズ光軸と平行になるよう、あるいは外殻の外側に向うに従って対物レンズ617のレンズ光軸に接近するように設置されている。照明レンズ1032から被写体に照射された照明光は、対物レンズ617の視野範囲を包含する範囲を照明する。これらのLED1033、照明レンズ1032、および電池1034は、図示しない固定部材により対物レンズ搭載部604aに固定されている。
尚、照明光の照射口となる照明レンズ1032は、外殻の軸方向に対物レンズ617と隣り合う位置に配置されるのが好ましい。それによれば、極至近距離にある被写体を撮像する場合などに、対物レンズ617の視野範囲を包含する範囲を照明しやすくなる。
上記のようにLED1033および照明レンズ1032を対物レンズ搭載部604aの外側に露出させることで、透明カプセル部603を通してその点灯状態を確認し易くなり、不具合を発見し易くなる。また、電源電池611とは別に電池1034からLED1033に電力を供給するようにしているので、例えばLED1033に高輝度のものを用い、LEDとしては比較的高いその消費電力を電池1034で十分にまかなうことができる。それにより、鮮明な画像を得ることができる。
この電子内視鏡1001には、図示しない電源スイッチが設けられ、この電源スイッチが投入されると、電源電池611からの電力が図示しない配線を通して撮像駆動ユニット部605の各構成部に供給され、また、電池1034からの電力が図示しない配線を通してLED1033に供給され、撮像動作,駆動動作が行われる。
図67は、撮像駆動ユニット部605の機能ブロック図である。システム全体を統括制御するCPU641には、制御プログラムが格納されると共にワークメモリとしても動作する制御メモリ642と、基板622に設けられる画像メモリ626と、LED1033を駆動するLED駆動回路643と、撮像素子627を駆動する撮像素子ドライバ644と、ステッピングモータ628を駆動するモータドライバ645に駆動パルスを供給するパルス発生器646とが接続される。
電源スイッチ647が投入されると、電源611,1034から各部に電力が供給されて動作を開始し、モータ628が回転駆動される。これにより、移動レンズ枠部604は、電子内視鏡1001の内部で回転し、且つ軸方向に進退する。
図66を参照して、LED1033からの照明光は、照明レンズ1032に入射する。そして、照明レンズ1032に入射した照明光は、透明カプセル部603を通して被写体方向に照射され、対物レンズ617の視野範囲に収められる被写体を照明する照明光となる。すなわち、照明レンズ1032により照明光学系が構成されている。
照明光は被写体で反射され、一部は被写体光として対物レンズ617に入射する。対物レンズ617に入射した被写体光は、平行光束となって対物ミラー616に進み、対物ミラー616で反射され、平行光束のまま集光レンズ630まで進む。そして、被写体光は、この集光レンズ630によって撮像素子627の受光面上に結像される。
撮像素子627で撮像された被写体の撮像信号は、CPU641に取り込まれて画像処理され、例えばJPEG画像データとして画像メモリ626に格納される。
内視鏡1001は、上述した内視鏡601と同様に、ステッピングモータ628を指定パルス数駆動して移動レンズ枠部604を電子内視鏡1001の内部で回転し、且つ軸方向に進退させ、視野を図53に示すNo.001→No.002→No.003・・・と移動させながら撮像処理と画像データのメモリ626への蓄積を繰り返して撮像する。
図53に示す「No.001」の視野の被写体画像を撮像した後には、指定パルス数のステッピングモータ628の駆動が行われ、移動レンズ枠部604は指定パルス数だけ回転する。これにより、移動レンズ枠部604は本体部602内に螺入して引っ込むことになる。それに伴い、移動レンズ枠部604に保持された対物レンズ617が移動され、視野は図53に示す「No.002」に移動する。その際、移動レンズ枠部604に搭載されたLED1033および照明レンズ1032もまた対物レンズ617と同様に移動され、移動する視野に追従し、「No.002」の視野を照明する。この視野の被写体画像を撮像し、画像データを画像メモリ626に蓄積することになる。
図68は、図66の状態に比較して、移動レンズ枠部604を透明カプセル603内で半周させた状態を示している。移動レンズ枠部604が透明カプセル部603内で原点位置から一周(一回転)し終わったときの撮像視野は図53のNo.011となり、二周(二回転)し終わったときの撮像視野は図53のNo.021となる。
図69は、円筒状部材604bの下端が本体部602の底部602aに当接しそれ以上その方向に移動できない状態を示しており、図69に示す状態に達したとき、撮影処理を繰り返す処理ループの終了となる。
電子内視鏡1001による撮像が終了した後は、画像メモリ626内の蓄積データを外部に読み出すことになる。
以上、電子内視鏡1001を例に説明したとおり、本明細書には、筒状に形成され、その周壁に軸方向に延びる透明な窓部が設けられた外殻と、前記外殻の内部に設けられた光源および固体撮像素子と、前記窓部を通して前記光源の照明光を被写体に照射する照明光学系と、前記窓部を通して被写体光を集光する対物レンズを含み、前記固体撮像素子に結像する対物光学系と、前記対物光学系の少なくとも前記対物レンズを保持したレンズホルダと、前記レンズホルダを前記外殻の軸に沿って移動させる駆動部と、を備え、前記光源および前記照明光学系が、前記レンズホルダに一体的に固定支持されていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記照明光学系の照射口が、前記外殻の軸方向に前記対物レンズと隣り合う位置に配置されていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記窓部は、前記外殻の周壁に全周にわたって設けられており、前記駆動部が、前記レンズホルダを前記外殻の軸を回転軸として回転させながら該外殻の軸に沿って移動させることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記外殻が円筒状に成形され、その内周面にネジ溝が形成されており、前記駆動部が、前記外殻の軸を回転軸として前記レンズホルダを回転駆動するモータを備え、前記レンズホルダが、前記外殻の前記ネジ溝に係合していることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記固体撮像素子から撮像信号を読み出して画像データを生成する制御部と、該画像データを格納するメモリと、を前記外殻内にさらに備えたことを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記駆動部が、電力により動作し、前記光源及び前記固体撮像素子並びに前記駆動部に電力を供給する電池を、前記外殻内にさらに備えたことを特徴とする電子内視鏡が開示されている。
図70~図72に示す電子内視鏡1101は、外殻となる本体部602及び透明カプセル部603と、内部に収納される移動レンズ枠部604と、後述の撮像ユニット部1105及び記憶及び駆動部1106とを備えて構成される。尚、上述した内視鏡601と同一の部材には同一符号を付し、また、機能的に共通する部材には相当符号を付すことにより、説明を省略あるいは簡略する。
上述した内視鏡601においては、本体部602と透明カプセル部603とは接着固定されているが、内視鏡1101においては、本体部602と透明カプセル部603とは螺合により相互に固定されている。即ち、本体部602の開口端部602dには、本体部602より若干小径の螺合突出部602eが突設されており、この螺合突出部602eの外周面には雄ネジが螺刻されている。また、透明カプセル部603の半球部603aと反対側の開口端部603bの内周面には、本体部602側の螺合突出部602eの雄ネジと螺合する雌ネジが螺刻されている。
撮像ユニット部1105は、基板1121,1122を備える。基板1121,1122は、円筒状部材604bの内側において且つ円筒状部材604bから離間した位置で、対物レンズ搭載部604aに固定設置される。上側(対物レンズ搭載部604a側)に配置された基板1121には、中央部に円筒状のレンズホルダ1129が設置され、その内部の基板1121上に、固体撮像素子1127が設置される。
レンズホルダ1129の上部開口には集光レンズ1130が設置され、対物ミラー616で反射された平行光束は集光レンズ1130で集光され、固体撮像素子1127の受光面に結像される。
移動レンズ枠部604は、対物レンズ搭載部604aの上部に設置されたLED1133と、LED1133の前部に置かれた照明レンズ1132とを備える。LED1133は照明光を発光し、照明レンズ1132で集光された照明光は、対物レンズ617の前部に来た被写体を照明する様になっている。
下側に配置された基板1122には、後述する第1制御ユニット1125が設置される。基板1122の下面部には電池収納部1122aが設けられ、ここに第2電源電池1111bが収納される。この第2電源電池1111bは、透明カプセル部603の雌ネジ603bと本体部602の雄ネジ602eとの螺合を解除して電子内視鏡1101を分解したとき、電池収納部1122aに装着される。
第1制御ユニット1125は第2電源電池1111bから駆動電力が供給され、また、LED1133には図示しない配線を通して第2電源電池1111bから駆動電力が供給される。
記憶及び駆動部1106は、本体部602の底部602aに設けられている電池収納部602bの周壁部を支柱として、図示しないステー部材を用い、本体部602の内部に固定設置される。記憶及び駆動部1106は、基板1123を備える。
基板1123上には、第2制御ユニット1124が固定設置されると共に、ステッピングモータ1128が固定設置され、ステッピングモータ1128の回転軸にモータギア(平歯車)1136が取り付けられる。ステッピングモータ1128の回転軸は円筒状部材604bの中心軸(=平行光束の光軸)と平行に設けられており、モータギア1136には平歯車のアイドルギア1137が噛合される。
アイドルギア1137の回転軸は基板1123に対して垂直に回転自在に軸支されており、アイドルギア1137の歯数はモータギア1136の歯数より多くなっている。このため、ステッピングモータ1128の回転速度は減速されてアイドルギア1137に伝達される。アイドルギア1137は、円筒状部材604bの内周面に設けられた内歯歯車604dに噛合される。
ステッピングモータ1128が回転すると、アイドルギア1137が回転し、これに伴って円筒状部材604bが回転する。円筒状部材604bが回転すると、その回転方向により、移動レンズ枠部604の円筒状部材604bが、本体部602の内部に螺入し或いは内部から螺出することになり、軸方向に進退する。
この電子内視鏡1101には、図示しない電源スイッチが設けられ、この電源スイッチが投入されると、第1電源電池1111aからの電力が図示しない配線を通して記憶及び駆動部1106の各構成部に供給され、駆動動作が行われる。
また、撮像ユニット部1105には、磁力に応動するスイッチ端子が内蔵され、電子内視鏡1101の外部から、磁石を近づけたり離したりすることで、このスイッチ端子がオンオフ操作され、第2電源電池1111bから撮像ユニット部1105への電力供給がオンオフ制御される様になっている。
図73は、第1制御ユニット1125の機能ブロック図である。撮像ユニット部1105を統括制御するCPU1141には、制御プログラムが格納されると共にワークメモリとしても動作する制御メモリ1142と、LED1133を駆動するLED駆動回路1143と、撮像素子1127を駆動する撮像素子ドライバ1144と、第2制御ユニット1124との間で無線通信を行う無線モジュール1148とが接続され、無線モジュール1148にはアンテナ1148aが設けられている。
図74は、第2制御ユニット1124の機能ブロック図である。システム全体を統括制御するCPU1149には、制御プログラムが格納されると共にワークメモリとしても動作する制御メモリ1151と、撮像ユニット部1105から無線で受信した画像データを格納する画像メモリ1126と、ステッピングモータ1128を駆動するモータドライバ1145に駆動パルスを供給するパルス発生器1146と、第1制御ユニット1125との間で無線通信を行う無線モジュール1152とが接続され、無線モジュール1152にアンテナ1152aが設けられている。
第2制御ユニット1124のCPU1149は、無線通信を介して、第1制御ユニット1125のCPU1141と連携して動作する。
上述した電源スイッチが投入されると、第1電源電池1111a,第2電源電池1111bから各部に電力が供給されて動作を開始し、モータ1128が回転駆動される。これにより、移動レンズ枠部604は、電子内視鏡1101の内部で回転し、且つ軸方向に進退する。また、LED1133からの発光光が照明レンズ1132で集光され、被写体方向に照射され、照明光となる。
被写体からの反射光は対物レンズ617を通して電子内視鏡1101内に取り込まれ、対物ミラー616で反射した被写体の光像は、平行光束のまま集光レンズ1130まで進み、この集光レンズ1130によって撮像素子1127の受光面上に結像される。
撮像素子1127で撮像された被写体の撮像信号は、CPU1141に取り込まれて画像処理され、例えばJPEG画像データに変換され、これが無線モジュール1148,1152を介してCPU1149に取り込まれ、画像メモリ1126に格納される。
図75は、制御メモリ1151に格納されている制御プログラムの処理手順を示すフローチャートである。電源スイッチが投入されると、この制御プログラムが立ち上げられ、先ず、ステッピングモータ1128が原点側に駆動される(ステップS1)。原点側とは、例えば図72に示す状態すなわち対物レンズ617の位置が電子内視鏡1101の先端側となる方向である。
本実施形態では、コスト削減のために、ステッピングモータ1128が原点に達したか否かを検出するセンサを設けていないので、次のステップS2で、所定時間を計数するタイマがカウントアップしたか否かを判定し、所定時間が経過しない間はステップS1を繰り返し実行する。原点に達したことを検出するセンサを設けていれば、このセンサの原点検出までステップS1を繰り返し実行すれば良い。
所定時間とは、ステッピングモータ1128が原点に達するに要する一番長い時間とすれば良い。例えば、図76に示す状態は、移動レンズ枠部604が回転して最下位位置まで移動した状態を示しており、この状態から、ステッピングモータ1128の回転によって移動レンズ枠部604が回転して図72に示す原点位置(移動レンズ枠部604が半球部603aの内周面に当接しそれ以上その方向に移動できない位置)に達するまでの時間とすれば良い。
これにより、移動レンズ枠部604が、図72の状態と図76の状態(円筒状部材604bの下端部が本体部602の底部602aに当接する状態)との間のいずれの中間位置の状態であっても、ステッピングモータ1128を原点位置方向に所定時間だけ駆動すれば、必ず、対物レンズ617は原点位置となる。
タイマが所定時間を計数した場合には、ステップS2からステップS3に進み、後述するカウンタの内容を0クリアする。そして、ステップS4に進み、撮像処理を行う。撮像処理とは、LED1133を点灯して対物レンズ617から照明光を照射し、被写体から反射した光を対物レンズ617から電子内視鏡1101内に取り込み、撮像素子1127の受光面に被写体からの入射光を結像させる。
そして、CPU1141は、撮像素子ドライバ1144を介して撮像素子1127を駆動し、撮像素子1127から得られた被写体の撮像信号を撮像素子1127から取り込み、画像処理して第2制御ユニット1124に送信し、第2制御ユニット1124のCPU1149が画像メモリ1126に格納する。
次のステップS5では、指定パルス数だけステッピングモータ1128を駆動し、次のステップS6ではカウンタの計数値にこの指定パルス数だけ加算し、次のステップS7では、カウンタの合計計数値を指定数を比較する。
そして、カウンタの合計計数値が指定数に達していない場合には、ステップS7からステップS4に戻って撮像処理を行い、以後、ステップS4~S7の処理ループを繰り返し実行する。カウンタの合計計数値が指定数に達したときは、この図75の処理を終了する。
図77は、図75のステップS4を繰り返し実行するときの対物レンズ617の撮像視野の移動を例示する図である。原点位置で行う初回の撮像処理では、図77の「No.001」で示す視野の被写体画像を撮像素子1127から取得する。
この視野「No.001」の被写体画像を撮像した後には、ステップS5で指定パルス数のステッピングモータ1128の駆動が行われるため、円筒状部材604bは指定パルス数だけ回転する。これにより、円筒状部材604bは本体部602内に螺入して引っ込むことになり、次の視野は、図77の「No.002」となり、この視野の被写体画像を撮像し、画像データを画像メモリ1126に蓄積することになる。
以後、視野をNo.003→No.004→No.005……と移動させて撮像処理と画像データのメモリ1126への蓄積を繰り返す。図78は、図72の状態に比較して、移動レンズ枠部604を透明カプセル603内で半周させた状態を示し、図79は、図72の状態に比較して1周させた状態を示している。
移動レンズ枠部604が透明カプセル部603内で原点位置から一周(一回転)し終わったときの撮像視野は図77のNo.011となり、二周(二回転)し終わったときの撮像視野は図77のNo.021となる。
図76は、円筒状部材604bの下端が本体部602の底部602aに当接しそれ以上その方向に移動できない状態を示しており、図76に示す状態に達したとき、撮影処理(ステップS4)を繰り返す処理ループの終了となる。即ち、図75のステップS7で用いる「指定数」は、原点位置から図76の状態に達するまでの合計パルス数である。
電子内視鏡1101による撮像が終了した後は、画像メモリ1126内の蓄積データを外部に読み出すことになる。
上述した内視鏡1101では、対物ミラー616を中心軸上に設け、この中心軸上に撮像素子1127の受光面を配置し、撮像孔604fを半径方向に直状に設けることで、対物ミラー616が光路を90度曲げて中心軸上の撮像素子1127に入射させる構成としたが、本例の場合、対物レンズ617と対物ミラー616と撮像素子1127の相互位置関係は、移動レンズ枠部604の回転移動に関わらず固定されているため、撮像素子1127の位置,対物ミラー616の位置、その反射角度、撮像孔604fの方向は、移動レンズ枠部604の回転移動の邪魔にならない任意の位置で良い。
また、対物レンズ617で入射光を平行光束にして平行光束のまま対物ミラー616で反射させる例について説明したが、対物レンズ617と対物ミラー616と撮像素子1127の相互位置関係は固定であるため、平行光束に限ることはなく、光路の途中にズームレンズを入れて画像の拡大画像を撮像できる様にすることでも良い。
以上、電子内視鏡1101を例に説明したとおり、本明細書には、少なくとも円筒部の観察窓が透明である透光性カバーと、該透光性カバーの前記円筒部に連設される円筒部を有する本体部と、前記透光性カバー及び前記本体部の内部で該透光性カバーの中心軸を中心に回転すると共に該中心軸の方向に移動するレンズホルダと、該レンズホルダに設けられ前記透光性カバーの前記円筒部に対面する位置に設けられた対物レンズを通して入射する光を前記本体部の方向に反射する対物ミラーと、前記レンズホルダに固定設置され前記対物ミラーで反射された光を受光し電気信号に変換する撮像素子と、前記本体部の内部に設けられ前記レンズホルダを回転駆動すると共に前記中心軸方向に駆動する駆動部とを備えることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記レンズホルダは、前記対物レンズが搭載され且つ前記対物ミラーが搭載された円盤状部材と、該円盤状部材の前記本体部側に一体に連設される円筒状部材とを備えることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記本体部の内周面に螺刻された雌ネジと、前記円筒状部材の外周面に螺刻され前記雌ネジと螺合する雄ネジであって前記駆動部により前記円筒状部材が回転駆動されたとき該円筒状部材を前記中心軸方向に移動させる雄ネジとを備えることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記撮像素子が撮像して得た画像信号を画像処理し画像処理後の画像データを無線で送信する制御部が前記レンズホルダに固定設置されていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記無線で送信された前記画像データを受信して格納する画像用メモリが前記本体部に設けられていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記透光性カバーと前記本体部とは分解可能に螺合することで連設されることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記撮像素子の駆動電源と前記駆動部の駆動電源とが別電源であることを特徴とする電子内視鏡が開示されている。
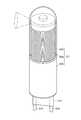
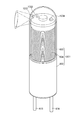
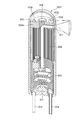
図80に示す電子内視鏡1200は、外殻となる本体部1211、及び少なくとも側面が透光性を有する筒体を有する透光性カバー1213とを有し、外殻の内部に収納される導入光学部1215及び後述の撮像部である撮像駆動ユニット部1217(図81参照)を備えて構成される。
図81は、電子内視鏡1200の縦断面図であり、図82は電子内視鏡1200の分解斜視図である。本体部1211は、樹脂材などで有底円筒形に形成されて成り、底部(図81の下側)1211aには筒状の電池収納部1211bが設けられ、電源電池1219が装着された後に電池収納部1211bは電池蓋1221によって気密に閉塞されるようになっている。
また、底部1211aには、図示する例では樹脂製の2本の硬質の把持管1223,1225が外部に対して突設固定され、この把持管1223,1225を持って操作することで、電子内視鏡1200の全体を、被検体となる孔内あるいは体腔内に挿入し引き出すことが可能になっている。把持管1223,1225内に、配線を挿通して電子内視鏡1200を使用する場合もある。
透光性カバー1213は、硬質の透明樹脂で形成され、一端部(先端部)は閉塞されて被検体内への挿入を容易にする滑らかな半球状に形成されている。この半球部1213aとは反対側の拡径した開口端部1213bと、本体部1211の開口端部1211dとは整合して互いに接着固定される。透光性カバー1213は一体成形により作製する他、半球部1213a、開口端部1213b等が透明円筒体に接着により固定された別体構成としてもよい。また、半球部1213aに遮光性を持たせて、外光が直接対物レンズ1277に導入されることを防止した構成としてもよい。ここで、透明樹脂とは、特定の波長の光に対して透明であればよく、必ずしも可視光に対して透明でなくてもよい。
導入光学部1215を覆う上記構成の透光性カバー1213は、本体部1211より細径に形成されている。また、筒体である透光性カバー1213の一端側が本体部1211よりも細径にされることで、外殻の一部に透光性カバー1213の半径方向に拡径する段付部(開口端部1213b)が形成される。つまり、段付部は透光性カバー1213と本体部1211との径差によって形成される。このように、電子内視鏡1200の先端を細くすることで、被検体内部の観察がし易くなる。もって被検体内の特に狭小となった部位の観察等、電子内視鏡の適用可能範囲を拡げることができる。なお、透光性カバー1213は段付部を有する先細りのテーパ形状としてもよく、このようにすると、小さな孔や体腔内に本体部1211の先端挿入部がいっそう挿入し易くなる。
本体部1211の内部には、円筒状の回転体であるレンズ駆動リング1285が配置されている。レンズ駆動リング1285の透光性カバー1213側(図中上側)には、導入光学部1215に繋がる移動レンズ枠1285cが連設されている。移動レンズ枠1285cの先端側には撮像孔である対物レンズ保持孔1275aが形成され、対物レンズ保持孔1275aには対物レンズ1277が固定され、透光性カバー1213の側方からの光(被写体光)を取り込む。対物レンズ1277を通して側方から取り込んだ光は、平行光束として移動レンズ枠1285cの内面に固定された対物ミラー1279に照射され、対物ミラー1279の斜め45度の反射面で反射して、平行光束のまま透光性カバー1213の中心軸に沿って撮像素子1249に向けて進むようになっている。
図83に撮像駆動ユニット部1217を含む一部拡大斜視図を示した。最下層(底部1211a側)の基板1241には昇降駆動部の駆動源であるステッピングモータのドライバ回路等を含む制御ユニット1245を配置し、中層の基板1242には撮像画像データを格納する画像メモリ1247を配置し、上層の基板1243には固体撮像素子であるCCD型イメージセンサやCMOS型イメージセンサ等の撮像素子1249を配置している。
基板1243には円筒状に形成された集光レンズホルダ1251を配置し、この集光レンズホルダ1251の内部に撮像素子1249を収納している。そして、集光レンズホルダ1251の上端開口部に集光レンズ1253を配置することで、導光される平行光束(被写体光)L1を、撮像素子1249の受光面に集光レンズ1253によって結像させている。
また、導入光学部1215と撮像素子1249との間の光路途中にはハーフミラー1255を配置して、照明光学系を付設している。照明光学系は、発光体としての発光ダイオード(LED)1257からの発光光を、このハーフミラー1255の反射により導入光学部1215に向けて照明光L2として照射する。つまり、ハーフミラー1255を、集光レンズ1253に入射する平行光束の集光レンズ1253の直前部分に、平行光束の光軸(本体部1211の中心軸)に対して斜め45度に傾斜して配置している。そして、照明光を平行光束とする照明レンズ1259を、LED1257とハーフミラー1255との間に設けている。これらのハーフミラー1255,照明レンズ1259,LED1257は、図示はしないが、それぞれ適宜な支持部材により本体部1211内に固定されている。
図84A及び図84Bは対物レンズを配置した移動レンズ枠の動作を示す図で、図84Aは上昇位置、図84Bは下降位置を表す一部拡大斜視図である。導入光学部1215は、透光性カバー1213の中心軸を中心に回転しつつ、透光性カバー1213内を中心軸方向に昇降移動する。導入光学部1215は筒状の移動レンズ枠1285cの先端に設けられ、移動レンズ枠1285cの側部に配置された対物レンズ1277が回転しながら中心軸方向に移動する螺旋軌道を描きながら、側方へ照明光を照射するとともに、側方からの反射光を取り込んで撮像素子1249に被写体光を送る。この導入光学部1215は、図81,図82に示すように、円筒状の移動レンズ枠1285cを介してレンズ駆動リング1285と一体にされており、レンズ駆動リング1285の回転動作と昇降動作と連動する。
次に、導入光学部1215を有するレンズ駆動リング1285の動作機構について説明する。図81,図82に示すように、本体部1211の内周面には、本体部1211の軸を中心とする精密な雌ネジ1211cが刻設されており、雄ネジ1285aが形成されたレンズ駆動リング1285が螺合し回転することで、レンズ駆動リング1285は、軸方向に進退するようになっている。また、レンズ駆動リング1285の内周面には内歯車1285bが形成されている。この内歯車1285bは、軸に平行な歯で且つレンズ駆動リング1285の軸方向全長に渡る歯が周方向に等間隔に形成されてなる。
最上層(底部1211a側とは反対側)の基板1243にはステッピングモータ1291が設置される。ステッピングモータ1291の回転軸にはモータギア(平歯車)1293が取り付けられる。ステッピングモータ1291の回転軸はレンズ駆動リング1285の中心軸(=平行光束の光軸)と平行に設けられており、モータギア1293には平歯車のアイドルギア1295が噛合される。
アイドルギア1295の回転軸は基板1243に対して垂直に回転自在に軸支されており、アイドルギア1295の歯数はモータギア1293の歯数より多くなっている。このため、ステッピングモータ1291の回転速度は減速されてアイドルギア1295に伝達される。アイドルギア1295は、レンズ駆動リング1285の内周面に設けられた内歯車1285bに噛合される。
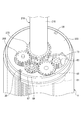
図85A~図85Cは内視鏡1200の動作説明図であり、図85Aはレンズ駆動リング1285が回転開始位置から半回転した位置を示し、図85Bはレンズ駆動リング1285が回転開始位置から一回転した位置を示し、図85Cはレンズ駆動リング1285が回転を終了した後退位置を示している。ステッピングモータ1291を駆動してモータギア1293を回転させると、アイドルギア1295が回転し、これに伴ってレンズ駆動リング1285が回転する。レンズ駆動リング1285が回転すると、その回転方向により、レンズ駆動リング1285が、本体部1211の内部で軸方向に昇降移動する。このように、移動レンズ枠1285cが回転しつつ、透光性カバー1213の内部を軸方向に移動する。よって、移動レンズ枠1285cは、回転しながら徐々に直進し、全視野の情報が対物ミラー1279に反射し、集光レンズ1253を介して撮像素子1249に取り込まれる。撮像素子1249の情報は適宜画像メモリ1247に送られ、全視野の情報が取得される。
上記の通り、内歯車1285b、モータギア1293、アイドルギア1295、ステッピングモータ1291により回転駆動部である昇降駆動部が構成される。また、雌ネジ1211c、レンズ駆動リング1285、雄ネジ1285a、昇降駆動部により駆動部が構成される。
この電子内視鏡1200には、図示しない電源スイッチが設けられ、この電源スイッチが投入されると、電源電池1219からの電力が図示しない配線を通して撮像駆動ユニット部1217の各構成部に供給され、撮像動作,駆動動作が後述するように行われる。
電源スイッチは、例えば、本体部1211の底部1211aに設けられ、手操作スイッチがオンオフされる構成としても良い。あるいは、本体部1211に磁力に応動するスイッチ端子を内蔵させ、電子内視鏡1200の外部から、磁石を近づけたり離したりすることで、このスイッチ端子をオンオフ操作する構成としても良い。
図86は、撮像駆動ユニット部1217の機能ブロック図である。システム全体を統括制御する制御部(CPU)1201には、制御プログラムが格納されると共にワークメモリとしても動作し、図83で説明した基板1242に設けられる画像メモリ1247を含むメモリ1203と、LED1257を駆動するLED駆動回路1205と、撮像素子1249を駆動する撮像素子ドライバ1207と、ステッピングモータ1291を駆動するモータドライバ1209に駆動パルスを供給するパルス発生器1208とが接続される。制御部1201が画像処理した後の画像データは、本体部1211に内蔵された画像メモリ1247に格納することで、電子内視鏡1200単体による画像の取得が行え、逐一画像データを外部に送信する方式よりも取扱い性を向上できる。
電源スイッチ1202が投入されると、電源電池1219から各部に電力が供給されて動作を開始し、ステッピングモータ1291が回転駆動される。これにより、移動レンズ枠1285cは、電子内視鏡1200の内部で回転し、且つ軸方向に進退する。また、LED1257からの発光光が照明レンズ1259で平行光に集光され、この平行光がハーフミラー1255により対物ミラー1279の方向に反射され、対物ミラー1279で反射した平行光が対物レンズ1277を通して被写体方向に照射され、照明光となる。
被写体からの反射光は対物レンズ1277を通して電子内視鏡1200内に取り込まれ、対物ミラー1279で反射した被写体の光像は、平行光束のまま集光レンズ1253まで進み、この集光レンズ1253によって撮像素子1249の受光面上に結像される。
撮像素子1249で撮像された被写体の撮像信号は、CPU1201に取り込まれて画像処理され、例えばJPEG画像データとして画像メモリ1247に格納される。
図87は、メモリ1203に格納されている制御プログラムの処理手順を示すフローチャートである。電源スイッチ1202が投入されると、この制御プログラムが立ち上げられ、先ず、ステッピングモータ1291が原点側に駆動される(ステップS1)。原点側とは、例えば図84Aに示す状態すなわち対物レンズ1277の位置が電子内視鏡1200の先端側となる方向である。
電子内視鏡1200では、ステッピングモータ1291が原点に達したか否かを検出するセンサを設けていないので、次のステップS2で、所定時間を計数するタイマがカウントアップしたか否かを判定し、所定時間が経過しない間はステップS1を繰り返し実行する。原点に達したことを検出するセンサを設けていれば、このセンサの原点検出までステップS1を繰り返し実行すれば良い。
所定時間とは、ステッピングモータ1291が原点に達するに要する一番長い時間とすれば良い。例えば、図84Bに示す状態は、移動レンズ枠1285cが回転して最下位位置hnまで移動した状態を示しており、この状態から、ステッピングモータ1291の回転駆動によって移動レンズ枠1285cが回転して図84Aに示す原点位置(移動レンズ枠1285cが透光性カバー1213の先端に当接する等、それ以上その方向に移動できない位置)h1に達するまでの時間とすれば良い。
これにより、移動レンズ枠1285cが、図84Aの状態と図84Bの状態(レンズ駆動リング1285の下端部が本体部1211の底部1211aに当接する状態)との間のいずれの中間位置の状態であっても、ステッピングモータ1291を原点位置方向に所定時間だけ駆動すれば、必ず、対物レンズ1277は原点位置となる。
タイマが所定時間を計数した場合には、ステップS2からステップS3に進み、後述するカウンタの内容を0クリアする。そして、ステップS4に進み、撮像処理を行う。撮像処理とは、LED1257を点灯して対物レンズ1277から照明光を照射し、被写体から反射した光を対物レンズ1277から電子内視鏡1200内に取り込み、撮像素子1249の受光面に被写体からの入射光を結像させる。
そして、CPU1201は、撮像素子ドライバ1207を介して撮像素子1249を駆動し、撮像素子1249から得られた被写体の撮像信号を撮像素子1249から取り込み、画像処理して画像メモリ1247に格納する。
次のステップS5では、指定パルス数だけステッピングモータ1291を駆動し、次のステップS6ではカウンタの計数値にこの指定パルス数だけ加算し、次のステップS7では、カウンタの合計計数値を指定数を比較する。
そして、カウンタの合計計数値が指定数に達していない場合には、ステップS7からステップS4に戻って撮像処理を行い、以後、ステップS4~S7の処理ループを繰り返し実行する。カウンタの合計計数値が指定数達したときは、この図87の処理を終了する。
図88は、図87のステップS4を繰り返し実行するときの対物レンズ1277の撮像視野の移動を例示する図である。原点位置で行う初回の撮像処理では、図88の「No.001」で示す視野の被写体画像を撮像素子1249から取得する。
この視野「No.001」の被写体画像を撮像した後には、ステップS5で指定パルス数のステッピングモータ1291の駆動が行われるため、レンズ駆動リング1285は指定パルス数だけ回転する。これにより、レンズ駆動リング1285は本体部1211内に螺入して引っ込むことになり、次の視野は、図88の「No.002」となり、この視野の被写体画像を撮像し、画像データを画像メモリ1247に蓄積することになる。
以後、視野をNo.003→No.004→No.005……と移動させて撮像処理と画像データのメモリ1203への蓄積を繰り返す。図85Aは、図85Bの状態に比較して、移動レンズ枠1285cを透光性カバー1213内で半周させた状態を示している。移動レンズ枠1285cが透光性カバー1213内で原点位置から一周(一回転)し終わったときの撮像視野は図88のNo.011となり、二周(二回転)し終わったときの撮像視野は図88のNo.021となる。
また、図85Cは、レンズ駆動リング1285の下端が本体部1211の底部1211aに当接しそれ以上その方向に移動できない状態を示しており、図85Cに示す状態に達したとき、撮影処理(ステップS4)を繰り返す処理ループの終了となる。即ち、図87のステップS7で用いる「指定数」は、原点位置から図85Cの状態に達するまでの合計パルス数である。
図88に例示した個々の撮像視野の移動例では、回転体となる移動レンズ枠1285cの回転方向で、隣接する撮像視野同士の左右の端部が接するように、あるいは若干重なるように、図87のステップS5の指定パルス数が設定されている。また、本体部1211の内周面とレンズ駆動リング1285の外周面に設けられた螺条のピッチは、回転軸方向に隣接する撮像視野同士の上下の端部が接するように、あるいは若干重なるように設計されている。
これにより、観察対象となる円筒状の被写体内周面の視野全域の状態を、漏れなく撮像し画像データとして取得することが可能となる。勿論、個々の撮像視野が大きく重なるように、ステッピングモータ1291のパルス数を設定したり雌ネジ1211c、雄ネジ1285aのピッチを設計しても良い。
電子内視鏡1200による撮像が終了した後は、図83の画像メモリ1247内の蓄積データを外部に読み出すことになる。この読み出しは、無線を用いて行っても良く、また、図80に示す把持管1223,1225内に挿通した配線を用いて読み出しても良い。あるいは、画像メモリ1247を電子内視鏡1200から取り出し可能に設けておき、取り出した画像メモリ1247を別置のパーソナルコンピュータで読むようにしても良い。
電子内視鏡1200は、撮像画像データを外部モニタに送り、外部モニタで撮像画像をオンラインで観察できるようにし、更に、外部から操作指示を入力できるようにしてもよい。この場合、CPU1201は、画像処理を行うことなく、撮像素子1249から取得した撮像信号をそのまま外部のビデオプロセッサに送り、ビデオプロセッサが画像処理した被写体画像を外部モニタに表示する構成としても良い。外部のビデオプロセッサや外部モニタとCPU1201との間の通信は、有線でも無線でも良い。有線で通信を行う場合には、配線中に電源線を入れることで、外部電源を利用することも可能となる。
以上説明した本実施形態の電子内視鏡1200によれば、電子内視鏡1200の外殻の一部に段付部(透光性カバー1213の開口端部1213b)を形成することにより、例えば被検体内の壁面にこの段付部が押し当てられるまで挿入を行うことで、筒体を観察位置である狭小な部位に簡単かつ確実に到達させることができる。これにより、電子内視鏡先端を狭小な部位に対しても容易に挿入することができ、しかも広い範囲の詳細な全周画像情報を簡単にかつ精度良く取得することができる。段付部は、透光性カバー1213に設ける他にも、透光性カバー1213を直状として本体部1211に段付部を形成する等、外殻体のいずれの位置に設けてもよいが、挿入する先への挿入長さを考慮して、段付部の位置を設定することが好ましい。
また、段付部は、電子内視鏡1200に対して等方的に拡径した環状に形成することで、偏心させて形成するよりは電子内視鏡をコンパクトな形状にすることができる。また、環状の段付部を備えることにより、電子内視鏡1200を任意の方向で被検体内に挿入しても、被検体内の壁面に段付部のいずれかの周位置が確実に押し当てられ、電子内視鏡先端の筒体を確実に所望の観察位置に到達させることができる。
つまり、図89に示すように、被検体の孔1296の奥側に存在する狭小の孔1297内を観察する場合、直管状の電子内視鏡では狭小の孔1297内に先端部を到達させることが困難となる。しかし、電子内視鏡1200は、先端に細径の観察窓となる透光性カバーがあるために、狭小の孔1297への挿入がガイドされて、この挿入操作が容易となる。しかも、図89A,図89Bの状態から挿入を進めて、図89Cに示すように、狭小の孔1297の入り口の内壁面1298が段付部である透光性カバー1213の開口端部1213bに当接すると、これ以上の挿入が阻止される。このように、挿入長さが段付部により規定されるので、挿入量の加減を気にしながら挿入する場合と比較して、簡単な操作により確実に目的の観察位置に電子内視鏡1200を配置できる。そして、目的の観察位置において、詳細な全周画像情報を簡単にかつ精度良く取得することができる。
なお、段付部は、電子内視鏡1200の挿入方向に対して直交する方向に延設された平坦面の他、挿入方向先端側が縮径するテーパ面とする等、適宜な変更が可能である。例えば、一つの平坦面に限らず、複数の面に分割して段付部を構成してもよい。
以上、電子内視鏡1200を例に説明したとおり、本明細書には、被検体内を撮像する電子内視鏡であって、一端部が閉塞されるとともに、少なくとも側面が透光性を有する筒体と、前記筒体の他端側に連設されて外殻を形成する本体部と、前記筒体内で該筒体の側方から取り込んだ外光を前記筒体の中心軸方向に導く導入光学部と、前記導入光学部から導かれた外光を受光して電気信号に変換する撮像部と、前記導入光学部を前記筒体の中心軸方向に進退させる駆動部と、を備え、前記筒体の前記一端側が前記本体部よりも細径にされ、前記筒体と前記本体部との径差によって形成される段付部を形成したことを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、外殻の一部に段付部を形成することにより、例えば被検体内の壁面にこの段付部が押し当てられるまで挿入を行うことで、筒体を観察位置である狭小な部位に簡単かつ確実に到達させることができる。これにより、電子内視鏡先端を狭小な部位に対しても容易に所望の場所に配置することができ、しかも広い範囲の詳細な全周画像情報を簡単にかつ精度良く取得することができる。
また、本明細書には、前記段付部が、前記筒体の中心軸に対して等方的に拡径した環状の段付部であることを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、等方的に拡径した環状の段付部を備えることにより、電子内視鏡を任意の方向で被検体内に挿入しても、被検体内の壁面に段付部のいずれかの周位置が確実に押し当てられ、電子内視鏡先端の筒体を確実に所望の観察位置に到達させることができる。また、等方的に拡径することで、電子内視鏡をコンパクトな形状にすることができる。
また、本明細書には、前記駆動部が、前記本体部が有する円筒部の内周面に形成された雌ネジと、前記導入光学部に一端部が接続されるとともに基端部が前記円筒部内に配置され、該基端部の外周面に前記雌ネジと螺合する雄ネジが螺刻された回転体と、前記回転体を前記円筒部の中心軸を中心に回転駆動して前記回転体を前記中心軸方向に移動させる回転駆動部と、を備えたことを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、被検体への挿入方向側方の光を、雄ネジと雌ネジとの螺合による簡単な構成で周方向に連続して取り込むことができる。
また、本明細書には、前記回転駆動部が、前記回転体の内周面に歯幅方向を前記円筒部の中心軸と平行に形成された内歯車と、前記回転体内に配置され前記内歯車と螺合するギアと、前記ギアを回転駆動するモータと、を備えたことを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、モータが回転すると、ギアが回転し、これに伴って回転体が回転して本体部の内部で軸方向に移動する。この動作に伴い、回転体に連結された導入光学部は回転しつつ筒体の内部を軸方向に移動する。
また、本明細書には、前記導入光学部は、周面に撮像孔が穿設され該撮像孔の開口端に対物レンズが搭載され、且つ前記対物レンズの光軸上に光路を偏向させるミラーが搭載されていることを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、対物レンズを介して筒体の側方から取り込んだ外光を、ミラーにて対物レンズ近傍で筒体軸方向に偏向でき、これにより、光路をコンパクトにまとめることができ、筒体の細径化が可能となる。
また、本明細書には、前記導入光学部と前記撮像素子との間の光路途中に配置したハーフミラーと、発光した光を前記ハーフミラーの反射により前記導入光学部側へ照射することで被検体を照明する発光体と、を備えることを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、発光体からの光がハーフミラーにより被検体の方向に反射して、これが被検体の側方全周を照らす照明光となる。
また、本明細書には、前記撮像部が撮像して得た画像信号を画像処理する制御部と、該制御部が画像処理した画像データを格納する画像メモリと、を前記本体部に内蔵することを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、制御部が画像処理した後の画像データを、本体部に内蔵された画像メモリに格納することで、電子内視鏡単体による画像の取得が行え、取扱い性を向上できる。
また、本明細書には、前記撮像部及び前記駆動部に電力を供給する電源電池を、前記本体部に内蔵することを特徴とする電子内視鏡が開示されている。
この電子内視鏡によれば、電源電池が本体部に内蔵されることで、外部から電源供給する必要がなく、従って本体部外から電源供給ケーブルを接続する必要がなくなり、取扱い性を向上できる。
図90~図92に示す電子内視鏡1301は、本体部1311及び透光性カバー1313で構成された外殻を備え、その内部に、透光性カバー1313を通して被写体光を集光する対物レンズ1317を保持したレンズホルダ1319と、外殻内でレンズホルダ1319を移動させる駆動部1321と、対物レンズ1317から取り込まれた被写体光を受光して電気信号に変換する固体撮像素子1323と、を備えている。
外殻の一部を構成する本体部1311は、遮光性を有する樹脂材などで形成されており、一方の端部1311aは閉じられ、他方の端部1311cは開口した円筒形に成形されている。閉じられた端部(底部)1311aには筒状の電池収納部1311bが設けられている。この電池収納部1311bは、電源電池1325が装着された後に電池蓋1327によって閉塞される。
図示の例では、底部1311aに、2本の管1329が外殻の外側に突出して設けられている。これらの管1329は、例えば後述するメモリ1383に格納された画像データや画像マップを外部の機器に転送する際に転送用のケーブルが挿通され、それらのケーブルを保護するために設けられている。また、管1329は軟質なものであってもよいが、硬質なものとして、内視鏡1301を使用する際に、内視鏡1301を被検体の孔に挿入し、もしくは孔から引き出すための把持部としてもよい。
透光性カバー1313は、円筒形に成形されており、一方の端部1313bは開口している。透光性カバー1313は、この開口端部1313bを本体部1311の開口端部1311cに整合させ、接着等の適宜の手段により本体部1311に固定されている。
透光性カバー1313の他方の端部(先端部)1313aは、被検体の孔への挿入を容易にするために、滑らかな半球状に成形されている。そして、先端部1313aと開口端部1313bとは、先端部1313aと同径に成形された円筒部1313cにより接続されている。内視鏡1301において、先端部1313aおよび円筒部1313cは、開口端部1313bに比べて小径に成形されている。このように、半球状に成形された先端部1313aおよび円筒部1313cを細くすることで、狭い孔への挿入を容易とすることができ、内視鏡1301の利用範囲を拡げることができる。
上記の構成の透光性カバー1313は、透明な樹脂材などを用い、例えば一体成形により作製することができる。また、半球状に成形される先端部1313a、開口端部1313b、および円筒部1313cを個別の部材とし、接着等の適宜に手段により互いに接合して作製してもよい。その場合に、少なくとも、被検体の孔の内周面を臨む窓部となる円筒部1313cは透明に形成される。尚、本発明において透明とは、撮像素子1323を感光させる特定の波長の光に対して透明であればよく、必ずしも可視光に対して透明でなくてもよい。
レンズホルダ1319は、樹脂材などで形成されており、本体部1311に内嵌する円筒状の被駆動部1333と、被駆動部1333よりも小径に成形されて透光性カバー1313の円筒部1313c内に進入可能な円筒状の支持部1315と、を有している。
レンズホルダ1319の被駆動部1333の外周面には、本体部1311の内周面に形成されたネジ溝1311dに螺合する雄ネジ1333bが形成されている。また、被駆動部1333の内周面には、内歯歯車1333aが形成されている。この内歯歯車1333aの歯は、被駆動部1333の中心軸と平行に延び、周方向に等間隔に形成されている。
また、レンズホルダ1319の支持部1315は、その外径が透光性カバー1313の円筒部1313cの内径よりも若干小径に成形され、外殻の中心軸に沿って円筒部1313c内でガタツキなくスムースに移動できるようになっている。
支持部1315の先端部には、ミラー1316が収納されている。このミラー1316は、略円柱状に成形されており、その下端部は、中心軸に斜め45度で交差する面で切断した形状となっている。その傾斜した切断面は、反射膜が製膜されるなどして対物用反射面1316bとされている。
そして、支持部1315においてミラー1316の対物用反射面1316bを径方向に臨む部位には撮像孔が形成されており、この撮像孔に対物レンズ1317が取り付けられている。被写体光は、透光性カバー1313の円筒部1313cを通して対物レンズ1317により集光され、平行光束となってミラー1316に向けて進行する。そして、被写体光は、ミラー1316の対物用反射面1316bで反射され、平行光束のまま、外殻の中心軸に一致した支持部1315の中心軸上を進行するようになっている。
本体部1311内において、レンズホルダ1319の支持部1315の中心軸の延長線上にあたる位置には、撮像駆動ユニット部1337が配置されている。撮像駆動ユニット部1337は、図示しない固定部材を用いて本体部1311に固定されている。図示する例では、撮像駆動ユニット部1337は3枚の基板1341,1342,1343を備えている。
レンズホルダ1319に最も接近して配置された基板1343には、固体撮像素子1323が設けられている。撮像素子1323としては、CCD型イメージセンサやCMOS型イメージセンサなどを用いることができる。基板1343の下(本体部1311の底部1311a側)に配置された基板1342には、メモリ1383が設けられている。このメモリ1383は、撮像素子1323から読み出された撮像信号から生成される画像データなどを格納する。そして、基板1342の下に配置された基板1341には、制御ユニット1345が設けられている。この制御ユニット1345は、例えば撮像素子1323からの撮像信号の読み出し、読み出された撮像信号からの画像データの生成、等を行う。
撮像素子1323は、基板1343上でレンズホルダ1319の支持部1315の中心軸の延長線上にあたる位置に設けられている。そして、支持部1315の中心軸の延長線上で撮像素子1323の上方にあたる位置には集光レンズ1351が配置されている。集光レンズ1351は、撮像素子1323を包囲するように基板1343上に設置された集光レンズホルダ1349に保持されている。この集光レンズ1351は、支持部1315の中心軸上を平行光束となって進行する被写体光を撮像素子1323の受光面に結像させる。このように、対物レンズ1317、ミラー1316の対物用反射面1316b、および集光レンズ1351により対物光学系が構成されている。
内視鏡1301は、被写体を照明するための照明光を発する光源として、発光ダイオード(LED)1355を備えている。このLED1355は、固体撮像素子1323とは外殻の軸方向に離間し、撮像素子1323との間にレンズホルダ1319を介在させるように、透光性カバー1313の先端部1313a内に収納されている。この先端部1313a内には、さらに、LED1355に電力を供給する電池1356、およびLED1355の照明光を集光する照明レンズ1357が収納されており、これらLED1355、電池1356、照明レンズ1357は保持部材1358を用いて透光性カバー1313の先端部1313aに固定されている。
レンズホルダ1319の支持部1315の先端には、その先端部に収容したミラー1316の上端部を露呈させる通孔1315aが形成されている。ミラー1316の上端部は、中心軸に斜めに交差する面で切断した形状となっており、その傾斜した切断面は、反射膜が製膜されるなどして照明用反射面1316aとされている。LED1355の照明光は、照明レンズ1357を透過し、支持部1315の中心軸の延長線上を進行し、通孔1315aを通して露呈したミラー1316の照明用反射面1316aに入射する。
ミラー1316の照明用反射面1316aは、対物用反射面1316bとの間にあって中心軸に直交する仮想的な面に関して対物用反射面1316bと略対称となるように傾斜している。そして、レンズホルダ1319の支持部1315において、対物レンズ1317の上方で、ミラー1316の照明用反射面1316aを径方向に臨む部位には照射口1315bが形成されている。照明用反射面1316aに入射した照明光は、照明用反射面1316aにおいて照射口1315bに向けて反射され、そして、照射口1315bから透光性カバー1313の円筒部1313cを通して被写体に照射される。
照明用反射面1316aの傾斜角は、照射口1315bから照射される照明光の光軸が対物レンズ1317のレンズ光軸と平行になるよう、あるいは外殻の外側に向うに従って対物レンズ1317のレンズ光軸に接近するように適宜設定されている。照射口1315bの開口径もまた適宜設定されている。それにより、照射口1315bから被写体に照射された照明光が、対物レンズ1317の視野範囲を包含する範囲を照明するようになっている。尚、照射口1315bは、外殻の軸方向に対物レンズ1317と隣り合う位置に配置されるのが好ましい。それによれば、極至近距離にある被写体を撮像する場合などに、対物レンズ1317の視野範囲を包含する範囲を照明しやすくなる。
このように、照明レンズ1357、ミラー1316の照明用反射面1316a、照射口1315bにより照明光学系が構成されている。ここで、対物光学系の対物用反射面1316bおよび照明光学系の照明用反射面1316aはいずれもミラー1316に形成されており、対物光学系と照明光学系とで光学部材が共用されている。それによれば、部品点数の削減、それによる小型化が図られる。
被駆動部1333の外周面に形成された雄ネジ1333bを本体部1311の内周面に形成されたネジ溝1311dに螺合させたレンズホルダ1319は、本体部1311の中心軸に沿って、換言すれば外殻の中心軸に沿って移動を案内されている。以下に、レンズホルダ1319を外殻の中心軸に沿って移動させる駆動部1321について詳細に説明する。
本体部1311内にはステッピングモータ1361が固定されており、また、ステッピングモータ1361のモータギア1363とレンズホルダ1319の被駆動部1333に形成された内歯歯車1333aとの間に介在して、両者にそれぞれ噛み合うアイドルギア1365が設けられている。ステッピングモータ1361の回転は、モータギア1363、アイドルギア1365を介してレンズホルダ1319に伝達される。尚、レンズホルダ1319を回転駆動する動力源としては、パルス駆動されるステッピングモータに限らず、エンコーダを有するサーボモータ等の各種モータ、あるいは他の動力源を用いることもできる。
レンズホルダ1319は、被駆動部1333を本体部1311に内嵌させており、よって、ステッピングモータ1361の回転が伝達されたレンズホルダ1319は、本体部1311の中心軸を回転軸として回転する。同時に被駆動部1333は、その外周面に形成された雄ネジ1333bにおいて本体部1311の内周面に形成されたネジ溝1311dに螺合している。そのため、レンズホルダ1319は、本体部1311の中心軸を回転軸として回転するのに伴い、本体部1311の中心軸に沿って移動(昇降)する。
例えば、レンズホルダ1319が図92に示す上昇位置にある状態で、ステッピングモータ1361を所定の方向に回転駆動し、モータギア1363、アイドルギア1365を介してレンズホルダ1319を回転させる。図93にレンズホルダ1319が半回転した状態を示す。図93に示すように、レンズホルダ1319は、本体部1311の中心軸を回転軸として回転しながら、本体部1311の中心軸に沿ってΔhだけ下降する。そして、レンズホルダ1319の回転に伴って対物レンズ1317もまた回転され、それにより撮像視野が円周方向に移動する。レンズホルダ1319は、回転しながら、本体部1311の中心軸に沿って図94に示す最下降位置まで、すなわち被駆動部1333の雄ネジ1333bの下端が本体部1311のネジ溝1311dの下端に達する位置まで下降可能となっている。
図95は、撮像駆動ユニット部1337の機能ブロック図である。撮像駆動ユニット部1337は、LED1355を駆動するLED駆動回路1385と、撮像素子1323を駆動する撮像素子ドライバ1387と、ステッピングモータ1361を駆動するモータドライバ1389と、このモータドライバ1389に駆動パルスを供給するパルス発生器1391と、これらLED駆動回路1385、撮像素子ドライバ1387、およびパルス発生器1391の動作を制御する制御部(CPU)1381と、を制御ユニット1345に備えている。また、メモリ1383には、制御ユニット1345の制御プログラムが格納されている。尚、メモリ1383は、制御プログラムを格納するとともに、画像データを格納し、またワークメモリとしても動作している。制御部1381は、撮像素子1323から読み出した撮像信号に適宜画像処理を施して画像データを生成し、生成した画像データをメモリ1383に格納する。かかる構成によれば、電子内視鏡1301単体で被写体の画像を取得・保存することができ、取り扱い性に優れる。
内視鏡1301の電源スイッチ1393が閉じられると、電源電池1325および電池1356からの電力が図示しない配線を通して内視鏡1301の各部に供給され、撮像が行われる。電源スイッチ1393は、例えば、本体部1311の底部1311aに設けられ、手操作により開閉される構成としても良い。あるいは、本体部1311に磁力に応動するスイッチ端子を内蔵させ、内視鏡1301の外部から、磁石を近づけたり離したりすることで、このスイッチ端子を開閉操作する構成としても良い。
次に、内視鏡1301の動作について説明する。電源スイッチ1393が投入され、電源電池1325および電池1356から内視鏡1301の各部に電力が供給される。そして、LED1355の照明光が、照射口1315bから透光性カバー1313の円筒部1313cを通して側方に照射され、被写体が照明される。被写体からの反射光は、透光性カバー1313の円筒部1313cおよび対物レンズ1317を通して内視鏡1301内に取り込まれ、集光レンズ1351によって撮像素子1323の受光面上に結像される。光電変換により撮像素子1323に蓄積された電荷は、制御ユニット1345の制御部1381により撮像信号として読み出される。制御部1381は、読み出した撮像信号に適宜画像処理を施して画像データを生成し、生成した画像データをメモリ1383に格納する。
図96は、制御ユニット1345の制御プログラムの処理手順を示すフローチャートである。電源スイッチ1393が投入されると、先ず、ステッピングモータ1361が回転駆動され、レンズホルダ1319が、内視鏡1301の外殻の中心軸に沿って進み、原点位置にセットされる(ステップS1)。尚、原点位置とは、例えば図92に示す位置であって、対物レンズ1317が内視鏡1301の先端側となる位置として説明するが、これに限らず、対物レンズ1317が反対の基端側となる位置(図94に示す位置)であってもよい。
レンズホルダ1319が原点位置にセットされた後、撮像処理を行う(ステップS2)。撮像処理とは、LED1355を駆動して照明光を照射し、被写体光を対物レンズ1317から内視鏡1301内に取り込んで撮像素子1323の受光面に結像させ、そして、撮像素子1323から読み出した撮像信号をもとに画像データを生成してメモリ1383に格納する処理を含む。
次に、指定したパルス数だけステッピングモータ1361を駆動し(ステップS3)、レンズホルダ1319を所定距離だけ下降させる。レンズホルダ1319が最下降位置に達するまでは(ステップS4)、その移動先で撮像処理(ステップS2)を行う。レンズホルダ1319が最下降位置に到達したらレンズホルダ1319の下降および撮像処理を終了する(ステップS4)。
図97は、上記ステップS2~S4を繰り返し実行するときの撮像視野の移動を例示する図である。原点位置で行う初回の撮像処理では、「No.001」の視野で撮像が行われ、撮像素子1323から読み出された撮像信号から「No.001」の視野の画像データが生成される。
この視野「No.001」での撮像処理が済んだ後、ステップS3で指定パルス数でのステッピングモータ1361の駆動が行われ、レンズホルダ1319が下降し、且つ回転する。それに伴い、レンズホルダ1319に保持された対物レンズ1317が移動され、視野は、図97の「No.002」に移動する。その際、レンズホルダ1319に設けられた照射口1315bもまた対物レンズ1317と同様に移動され、移動する視野に追従し、「No.002」の視野を照明する。そして、この視野で撮像が行われ、撮像素子1323から読み出された撮像信号から「No.002」の視野の画像データが生成されることになる。
ここで、レンズホルダ1319は、外殻の軸方向に離間したLED1355と固体撮像素子1323との間で外殻の軸に沿って移動されていることから、LED1355から固体撮像素子1323に至る光路長は、レンズホルダ1319の移動によらず略一定となる。例えば、レンズホルダ1319が図92に示す原点位置にあるときに、照明光学系(LED1355→照明レンズ1357→ミラー1316の照明用反射面1316a→照射口1315b)の光路長に比べ対物光学系(対物レンズ1317→ミラー1316の対物用反射面1316b→集光レンズ1351→固体撮像素子1323)の光路長が長くなっている。これに対し、レンズホルダ1319が図94に示す最下降位置にあるときは、照明光学系の光路長が伸び、その分だけ対物光学系の光路長が短くなっている。そこで、レンズホルダ1319が原点位置にあるときのLED1355から固体撮像素子1323に至る光路長L5と、最下降位置にあるときのLED1355から固体撮像素子1323に至る光路長L6とは、ほぼ等しくなる。そのため、LED1355から固体撮像素子1323に至る間に拡散等で減衰する光量もまたほぼ等しくなり、固体撮像素子1323に入射する光量は略一定に保たれる。
以後、視野を「No.003」→「No.004」→「No.005」・・・と移動させ、撮像処理を繰り返す。レンズホルダ1319が原点位置から一周したときの撮像視野は図97の「No.011」となり、二周したときの撮像視野は図97の「No.021」となる。本実施形態では、メモリ1383に格納された複数の画像データを図97に示す視野の移動例同様に配列して画像マップを作成している(ステップS5)。
尚、例えばステップS3においてステッピングモータ1361に供給されるパルス数を適宜調節し、あるいは本体部1311のネジ溝1311dおよび被駆動部1333の雄ネジ1333bのネジピッチを適宜調節するなどして、円周方向に隣接する撮像視野同士の左右の端部が接し、あるいは若干重なる様に、また、軸方向に隣接する撮像視野同士の上下の端部が接し、あるいは若干重なる様にしてもよい。それによれば、軸方向および円周方向に被写体をもれなく撮影でき、隙間のない画像マップを得ることができる。
上記の画像マップが作成された後は、この画像マップをメモリ1383から外部に読み出すことになる。この読み出しは、無線を用いて行っても良く、また、転送用のケーブルを図90に示す管1329内に挿通して撮像駆動ユニット部1337に接続し、このケーブルを用いて読み出しても良い。あるいは、メモリ1383を内視鏡1301から取り出し可能に設けておき、取り出したメモリ1383を別置のパーソナルコンピュータで読むようにしても良い。
以上、電子内視鏡1301を例に説明したとおり、本明細書には、筒状に形成され、その周壁に軸方向に延びる透明な窓部が設けられた外殻と、前記外殻の内部に設けられた光源および固体撮像素子と、前記窓部を通して前記光源の照明光を被写体に照射する照明光学系と、前記窓部を通して被写体光を集光する対物レンズを含み、前記固体撮像素子に結像する対物光学系と、前記対物光学系の少なくとも前記対物レンズを保持したレンズホルダと、前記レンズホルダを前記外殻の軸に沿って移動させる駆動部と、を備え、前記光源が、前記固体撮像素子とは前記外殻の軸方向に離間して配置されており、前記レンズホルダが、前記光源と前記固体撮像素子との間で前記外殻の軸に沿って移動され、前記照明光学系の照射口が、前記レンズホルダに設けられていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記照射口が、前記外殻の軸方向に前記対物レンズと隣り合う位置に設けられていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記照明光学系が、前記照明光を前記照射口に向けて反射する第1反射面を含み、前記対物光学系が、前記被写体光を前記固体撮像素子に向けて反射する第2反射面を含んでおり、前記光源および前記固体撮像素子が、同一の軸線上に配置され、前記第1反射面および前記第2反射面が、前記軸線上に配置された単一の光学部材に形成されていることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記窓部は、前記外殻の周壁に全周にわたって設けられており、前記駆動部が、前記レンズホルダを前記外殻の軸を回転軸として回転させながら該外殻の軸に沿って移動させることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記外殻が円筒状に成形され、その周壁の内周面にネジ溝が形成されており、前記駆動部が、前記外殻の軸を回転軸として前記レンズホルダを回転駆動するモータを備え、前記レンズホルダが、前記外殻の前記ネジ溝に係合していることを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記固体撮像素子から撮像信号を読み出して画像データを生成する制御部と、該画像データを格納するメモリと、を前記外殻内にさらに備えたことを特徴とする電子内視鏡が開示されている。
また、本明細書には、前記駆動部が、電力により動作し、前記光源及び前記固体撮像素子並びに前記駆動部に電力を供給する電池を、前記外殻内にさらに備えたことを特徴とする電子内視鏡が開示されている。
次に、上述した各電子内視鏡の好適な使用例について説明する。
(i)子宮内視鏡としての使用例:
近年、女性が罹患する子宮頸ガンの若年齢化が進んでいるが、子宮頸ガンは発見が早ければ部分摘出で大事に至らないため、早期発見が重要である。しかし、女性の場合、自分の体を見られることに抵抗があり、検診人口が増えないという傾向がある。
近年、女性が罹患する子宮頸ガンの若年齢化が進んでいるが、子宮頸ガンは発見が早ければ部分摘出で大事に至らないため、早期発見が重要である。しかし、女性の場合、自分の体を見られることに抵抗があり、検診人口が増えないという傾向がある。
上述した各電子内視鏡は、その寸法形状を適切な大きさに設計しておけば、子宮頸ガンの検診に有効である。電子内視鏡を女性の膣腔内に挿入し、一連の撮像視野位置が子宮頸部に達するように先端部から電子内視鏡を子宮頸部にまで挿入することで、子宮頸部の内周面の様子をもれなく撮像することが可能となる。
使用形態としては、例えば、診察室で電子内視鏡を患者自身の手によって子宮頸部にまで挿入してもらい、医師は別室で挿入位置を指示したり撮像画像をオンラインでモニタ観察するようにすれば、患者の心理的負担が軽減され、もって検診人口を増やすことが可能となる。
特に、上述した電子内視鏡1200を膣腔内からその先の子宮頸管へを挿入する場合に、子宮頸管の入り口の子宮膣部の内壁が電子内視鏡1200の段付部に当接することで、電子内視鏡1200の挿入量が規制される。これにより、子宮頸管の内壁面に電子内視鏡1200の先端を確実に配置させることができ、挿入長さに対しても適正な位置での挿入停止がなされる。
また、上述した各電子内視鏡は、電源スイッチをオンにすれば対物レンズの位置が自動的に原点位置に戻り且つ撮像処理が自動的に行われるため、この電子内視鏡を患者に貸し出し、患者自身が自宅で自身の子宮頸部の画像を撮像することが可能となる。医者は、電子内視鏡を回収し、メモリ内の撮像画像データを調べることで、診断が可能となる。
(ii)大腸用,直腸用の内視鏡としての使用例:
大腸や直腸の検診を行う場合、従来は、先端部に撮像素子が搭載された内視鏡で観察するため、患部を斜め上方向から観察することになる。しかし、上述した各電子内視鏡を患部位置まで挿入し、撮像を行えば、患部を垂直上方位置から観察することが可能となり、より詳細に観察ができ、精度の高い診断が可能となる。
大腸や直腸の検診を行う場合、従来は、先端部に撮像素子が搭載された内視鏡で観察するため、患部を斜め上方向から観察することになる。しかし、上述した各電子内視鏡を患部位置まで挿入し、撮像を行えば、患部を垂直上方位置から観察することが可能となり、より詳細に観察ができ、精度の高い診断が可能となる。
(iii)工業用内視鏡としての使用例:
例えば、細い配管内の微細なキズを観察するような工業用の内視鏡として上述した各電子内視鏡を用いることができる。観察対象となる孔や隙間の開口の大きさや挿入する深さに応じた寸法形状の電子内視鏡を用意する。上記したように、キズ等に対して孔の内周面に対して垂直上方から観察できるため、より詳細な観察が可能となる。また、一度挿入すれば、広い範囲の観察が可能となり、小さなキズなどの見逃し率も低下する。
例えば、細い配管内の微細なキズを観察するような工業用の内視鏡として上述した各電子内視鏡を用いることができる。観察対象となる孔や隙間の開口の大きさや挿入する深さに応じた寸法形状の電子内視鏡を用意する。上記したように、キズ等に対して孔の内周面に対して垂直上方から観察できるため、より詳細な観察が可能となる。また、一度挿入すれば、広い範囲の観察が可能となり、小さなキズなどの見逃し率も低下する。
本発明により、広い範囲の詳細な画像情報を簡単に精度良く取得することができる。
本発明を詳細にまた特定の実施態様を参照して説明したが、本発明の精神と範囲を逸脱することなく様々な変更や修正を加えることができることは当業者にとって明らかである。
本出願は、2008年6月17日出願の日本特許出願(特願2008-157991、特願2008-157992、特願2008-157993、特願2008-157999、特願2008-158000、特願2008-158002、特願2008-158004、特願2008-158005、特願2008-158006、特願2008-158013)に基づくものであり、その内容はここに参照として取り込まれる。
本出願は、2008年6月17日出願の日本特許出願(特願2008-157991、特願2008-157992、特願2008-157993、特願2008-157999、特願2008-158000、特願2008-158002、特願2008-158004、特願2008-158005、特願2008-158006、特願2008-158013)に基づくものであり、その内容はここに参照として取り込まれる。
1 内視鏡
11 本体部(外殻)
13 透光性カバー(外殻)
13c 円筒部(窓部)
16 対物ミラー(対物光学系)
17 対物レンズ(対物光学系)
19 レンズホルダ
21 駆動部
23 固体撮像素子
25 電源電池
51 集光レンズ(対物光学系)
61 ステッピングモータ
67 送りネジ
81 制御部
83 メモリ
500 電子内視鏡
511 本体部
511a 底部
511b 電池収納部
511c 開口端部
513 透光性カバー部
513a 半球部
513b 開口端部
513c 円筒部
513d 軸穴
515 筒状部
517 対物レンズ群
517A 広角レンズ
517B レンズ
519 レンズホルダ
521 昇降駆動部
523 撮像素子
525 電源電池
527 電池蓋
529 配線保護管
531 リブ
533 鍔部
535 係合溝
537 撮像駆動ユニット部
541,542,543 基板
545 制御ユニット
547 画像メモリ
549 集光レンズホルダ
551 集光レンズ
553 ハーフミラー
555 発光ダイオード
557 照明レンズ
561 ステッピングモータ
563 モータギア
565 アイドルギア
567 送りネジ
569 ギア
571 支持アーム
573 開口孔
575 送りナット
577 ナット押さえ
581 制御部
583 メモリ
585 LED駆動回路
587 撮像素子ドライバ
591 パルス発生器
593 電源スイッチ
W 視野範囲
601 電子内視鏡
602 本体部
602a 底部
602b 電池収納部
602c 内周面に設けた雌ネジ
603 透明カプセル部(透光性カバー)
603a 先端の半球部
603c 円筒部
604 移動レンズ枠部(レンズホルダ)
604a 円盤状の対物レンズ搭載部
604b 円筒状部材
604c 外周面に設けた雄ネジ
604d 内歯歯車
604f 撮像孔
605 撮像駆動ユニット部
611 電源電池
612 電池蓋
613,14 把持管
616 対物ミラー
617 対物レンズ
621,622,623 基板
626 画像用メモリ
627 固体撮像素子
628 ステッピングモータ
629 レンズホルダ
630 集光レンズ
631 ハーフミラー
632 照明レンズ
633 LED(発光体)
636 モータギア
637 アイドルギア
641 制御装置(CPU)
647 電源スイッチ
11 本体部(外殻)
13 透光性カバー(外殻)
13c 円筒部(窓部)
16 対物ミラー(対物光学系)
17 対物レンズ(対物光学系)
19 レンズホルダ
21 駆動部
23 固体撮像素子
25 電源電池
51 集光レンズ(対物光学系)
61 ステッピングモータ
67 送りネジ
81 制御部
83 メモリ
500 電子内視鏡
511 本体部
511a 底部
511b 電池収納部
511c 開口端部
513 透光性カバー部
513a 半球部
513b 開口端部
513c 円筒部
513d 軸穴
515 筒状部
517 対物レンズ群
517A 広角レンズ
517B レンズ
519 レンズホルダ
521 昇降駆動部
523 撮像素子
525 電源電池
527 電池蓋
529 配線保護管
531 リブ
533 鍔部
535 係合溝
537 撮像駆動ユニット部
541,542,543 基板
545 制御ユニット
547 画像メモリ
549 集光レンズホルダ
551 集光レンズ
553 ハーフミラー
555 発光ダイオード
557 照明レンズ
561 ステッピングモータ
563 モータギア
565 アイドルギア
567 送りネジ
569 ギア
571 支持アーム
573 開口孔
575 送りナット
577 ナット押さえ
581 制御部
583 メモリ
585 LED駆動回路
587 撮像素子ドライバ
591 パルス発生器
593 電源スイッチ
W 視野範囲
601 電子内視鏡
602 本体部
602a 底部
602b 電池収納部
602c 内周面に設けた雌ネジ
603 透明カプセル部(透光性カバー)
603a 先端の半球部
603c 円筒部
604 移動レンズ枠部(レンズホルダ)
604a 円盤状の対物レンズ搭載部
604b 円筒状部材
604c 外周面に設けた雄ネジ
604d 内歯歯車
604f 撮像孔
605 撮像駆動ユニット部
611 電源電池
612 電池蓋
613,14 把持管
616 対物ミラー
617 対物レンズ
621,622,623 基板
626 画像用メモリ
627 固体撮像素子
628 ステッピングモータ
629 レンズホルダ
630 集光レンズ
631 ハーフミラー
632 照明レンズ
633 LED(発光体)
636 モータギア
637 アイドルギア
641 制御装置(CPU)
647 電源スイッチ
Claims (22)
- 筒状に形成され、その周壁に軸方向に延びる透明な窓部が設けられた外殻と、
前記外殻の内部に設けられた固体撮像素子と、
前記窓部を通して被写体光を集光する対物レンズを含み、前記固体撮像素子に結像する対物光学系と、
前記対物光学系の少なくとも前記対物レンズを前記外殻の軸に沿って移動させる駆動機構と、
を備えることを特徴とする電子内視鏡。 - 請求項1に記載の電子内視鏡であって、
前記駆動機構が、前記対物レンズを支持するレンズホルダと、前記外殻の軸に沿って延びる送りネジと、前記送りネジを回転駆動するモータと、を備え、
前記レンズホルダが、前記送りネジのネジ溝に係合し、且つ前記送りネジを回転軸とした回転を規制されていることを特徴とする電子内視鏡。 - 請求項1に記載の電子内視鏡であって、
前記駆動機構が、前記対物レンズを支持するレンズホルダと、前記外殻の軸に沿って延びる送りネジと、前記送りネジを回転軸として前記レンズホルダを回転駆動するモータと、を備え、
前記レンズホルダが、前記送りネジのネジ溝に係合していることを特徴とする電子内視鏡。 - 請求項1に記載の電子内視鏡であって、
前記外殻が円筒状に成形され、その内周面にネジ溝が形成されており、
前記駆動機構が、前記対物レンズを支持するレンズホルダと、前記外殻の軸を回転軸として前記レンズホルダを回転駆動するモータと、を備え、
前記レンズホルダが、前記外殻の前記ネジ溝に係合していることを特徴とする電子内視鏡。 - 請求項1に記載の電子内視鏡であって、
前記固体撮像素子から撮像信号を読み出して画像データを生成する制御部と、該画像データを格納するメモリと、を前記外殻内にさらに備えることを特徴とする電子内視鏡。 - 請求項1に記載の電子内視鏡であって、
前記駆動機構が、電力により動作し、
前記固体撮像素子及び前記駆動機構に電力を供給する電源電池を、前記外殻内にさらに備えることを特徴とする電子内視鏡。 - 被検体の内部に挿入して被検体内を撮像する電子内視鏡であって、
筒状部を有するレンズホルダと、
前記レンズホルダに装着され、前記筒状部の一端側に、該筒状部の中心軸に光軸を合わせて配置し、前記筒状部の側方まで観察視野が広がる広角レンズと、
前記広角レンズから取り込まれる光を受光し電気信号に変換する撮像素子と、
前記筒状部の一端側を覆い、少なくとも前記広角レンズの観察視野内に対面する部位が透光性を有する透光性カバーと、
前記筒状部の他端側で前記透光性カバーと接続される筒状の本体部と、
前記本体部内に配置され前記レンズホルダを前記中心軸方向に進退させる駆動部と、
を備えることを特徴とする電子内視鏡。 - 請求項7記載の電子内視鏡であって、
前記撮像素子が、前記被検体への挿入方向の側方全周からの光を受光することを特徴とする電子内視鏡。 - 請求項7に記載の電子内視鏡であって、
前記広角レンズが円周魚眼レンズであることを特徴とする電子内視鏡。 - 請求項7に記載の電子内視鏡であって、
前記広角レンズと前記撮像素子との間の光路途中に配置したハーフミラーと、発光した照明光を前記ハーフミラーの反射により前記広角レンズへ照射することで被検体を照明する発光体と、を備えることを特徴とする電子内視鏡。 - 請求項7に記載の電子内視鏡であって、
前記レンズホルダの筒状部、および前記透光性カバーの前記筒状部を覆う先端部が、前記本体部より細径に形成されていることを特徴とする電子内視鏡。 - 請求項7に記載の電子内視鏡であって、
前記駆動部が、前記本体部内で前記広角レンズの光軸方向と平行に回転自在に支持された送りネジと、該送りネジに螺合して前記レンズホルダに固着された送りナットと、前記送りネジを回転駆動するモータと、を有することを特徴とする電子内視鏡。 - 請求項7に記載の電子内視鏡であって、
前記撮像素子が撮像して得た画像信号を画像処理する制御部と、該制御部が画像処理した画像データを格納する画像メモリと、を前記本体部に内蔵していることを特徴とする電子内視鏡。 - 請求項7に記載の電子内視鏡であって、
前記撮像素子及び前記駆動部に電力を供給する電源電池を、前記本体部に内蔵していることを特徴とする電子内視鏡。 - 少なくとも円筒部の観察窓が透明である円筒状の透光性カバーと、
前記透光性カバーの前記円筒部に連設される円筒部を有する本体部と、
前記透光性カバー及び前記本体部の内部で該透光性カバーの中心軸を中心に回転すると共に該中心軸の方向に移動するレンズホルダと、
前記レンズホルダに設けられ前記透光性カバーの前記円筒部に対面する位置に設けられた対物レンズを通して入射する光を前記本体部の方向に反射する対物ミラーと、
前記対物ミラーで反射された光を受光し電気信号に変換する撮像素子と、
前記本体部の内部に設けられ前記レンズホルダを回転駆動すると共に前記中心軸方向に駆動する駆動部と、
を備えることを特徴とする電子内視鏡。 - 請求項15に記載の電子内視鏡であって、
前記レンズホルダは、前記対物レンズが搭載され且つ前記対物ミラーが搭載された円盤状部材と、該円盤状部材の前記本体部側に一体に連設される円筒状部材とを備えることを特徴とする電子内視鏡。 - 請求項16に記載の電子内視鏡であって、
前記本体部の内周面に螺刻された雌ネジと、前記円筒状部材の外周面に螺刻され前記雌ネジと螺合する雄ネジであって前記駆動部により前記円筒状部材が回転駆動されたとき該円筒状部材を前記中心軸方向に移動させる雄ネジと、を備えることを特徴とする電子内視鏡。 - 請求項15に記載の電子内視鏡であって、
前記対物レンズの光軸は前記レンズホルダの回転軸に対して垂直方向に設けられていることを特徴とする電子内視鏡。 - 請求項15に記載の電子内視鏡であって、
前記対物ミラーは、前記対物レンズを通して入射する光を前記中心軸を通る光路で前記本体部の方向に反射することを特徴とする電子内視鏡。 - 請求項15に記載の電子内視鏡であって、
前記対物ミラーで反射される光の光路途中に設けられるハーフミラーと、照明光を発光させ該照明光を前記ハーフミラーで反射させ前記対物ミラーで反射させることで前記対物レンズを通し被写体を照明する発光体とを備えることを特徴とする電子内視鏡。 - 請求項15に記載の電子内視鏡であって、
前記撮像素子が撮像して得た画像信号を画像処理する制御部と、該制御部が画像処理した撮像データを格納する画像メモリとを内蔵することを特徴とする電子内視鏡。 - 請求項15に記載の電子内視鏡であって、
前記撮像素子及び前記駆動部に電力を供給する電源電池を収納する電池収納部を前記本体部に備えることを特徴とする電子内視鏡。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09766622.6A EP2294965A4 (en) | 2008-06-17 | 2009-06-15 | ELECTRONIC ENDOSCOPE |
| US12/999,815 US8512231B2 (en) | 2008-06-17 | 2009-06-15 | Electronic endoscope including lens holder and objective mirror |
| US13/763,468 US20130147934A1 (en) | 2008-06-17 | 2013-02-08 | Electronic endoscope |
| US13/763,502 US20130147935A1 (en) | 2008-06-17 | 2013-02-08 | Electronic endoscope |
| US13/763,485 US20130155214A1 (en) | 2008-06-17 | 2013-02-08 | Electronic endoscope |
Applications Claiming Priority (20)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008158013A JP5171418B2 (ja) | 2008-06-17 | 2008-06-17 | 内視鏡 |
| JP2008-158002 | 2008-06-17 | ||
| JP2008-158013 | 2008-06-17 | ||
| JP2008-158000 | 2008-06-17 | ||
| JP2008158004A JP5171416B2 (ja) | 2008-06-17 | 2008-06-17 | 内視鏡 |
| JP2008-157992 | 2008-06-17 | ||
| JP2008158002A JP2009297420A (ja) | 2008-06-17 | 2008-06-17 | 内視鏡 |
| JP2008-158004 | 2008-06-17 | ||
| JP2008158006A JP2009297424A (ja) | 2008-06-17 | 2008-06-17 | 電子内視鏡 |
| JP2008158005A JP5171417B2 (ja) | 2008-06-17 | 2008-06-17 | 電子内視鏡 |
| JP2008-158005 | 2008-06-17 | ||
| JP2008157999A JP5193694B2 (ja) | 2008-06-17 | 2008-06-17 | 内視鏡及び内視鏡の作動方法 |
| JP2008-157991 | 2008-06-17 | ||
| JP2008-157999 | 2008-06-17 | ||
| JP2008-158006 | 2008-06-17 | ||
| JP2008157991A JP5276907B2 (ja) | 2008-06-17 | 2008-06-17 | 内視鏡 |
| JP2008157992A JP2009297410A (ja) | 2008-06-17 | 2008-06-17 | 内視鏡 |
| JP2008158000A JP2009297418A (ja) | 2008-06-17 | 2008-06-17 | 内視鏡 |
| JP2008-157993 | 2008-06-17 | ||
| JP2008157993A JP2009297411A (ja) | 2008-06-17 | 2008-06-17 | 電子内視鏡 |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/763,502 Continuation US20130147935A1 (en) | 2008-06-17 | 2013-02-08 | Electronic endoscope |
| US13/763,485 Continuation US20130155214A1 (en) | 2008-06-17 | 2013-02-08 | Electronic endoscope |
| US13/763,468 Continuation US20130147934A1 (en) | 2008-06-17 | 2013-02-08 | Electronic endoscope |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2009154174A1 true WO2009154174A1 (ja) | 2009-12-23 |
Family
ID=41434090
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/060885 WO2009154174A1 (ja) | 2008-06-17 | 2009-06-15 | 電子内視鏡 |
Country Status (3)
| Country | Link |
|---|---|
| US (4) | US8512231B2 (ja) |
| EP (1) | EP2294965A4 (ja) |
| WO (1) | WO2009154174A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CZ306728B6 (cs) * | 2011-02-03 | 2017-05-31 | Karel Dušek | Zařízení pro lékařské vyšetření, zejména koloskopii |
| JP2022051712A (ja) * | 2020-09-21 | 2022-04-01 | プキョン ナショナル ユニバーシティ インダストリー-ユニバーシティ コーポレーション ファウンデーション | 子宮頸癌早期診断のためのモバイル膣拡大鏡装置 |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101744601B (zh) * | 2008-12-05 | 2013-04-24 | 德昌电机(深圳)有限公司 | 胶囊式成像装置和体内图像获取系统 |
| DE102010022430A1 (de) * | 2010-06-01 | 2011-12-01 | Karl Storz Gmbh & Co. Kg | Sichtfeldvorrichtung für ein Endoskop |
| CN106037624B (zh) | 2010-09-08 | 2018-09-07 | Kpr美国有限责任公司 | 具有成像组件的导管 |
| WO2012078853A2 (en) * | 2010-12-08 | 2012-06-14 | Cornell University | Microscope apparatus, method and application |
| US8886449B2 (en) * | 2012-01-13 | 2014-11-11 | Qualcomm Incorporated | Calibrated hardware sensors for estimating real-world distances |
| US20130289362A1 (en) * | 2012-04-30 | 2013-10-31 | Empire Technology Development Llc | Infrared guide stars for endoscopic orienteering |
| US9198835B2 (en) | 2012-09-07 | 2015-12-01 | Covidien Lp | Catheter with imaging assembly with placement aid and related methods therefor |
| USD735343S1 (en) | 2012-09-07 | 2015-07-28 | Covidien Lp | Console |
| USD716841S1 (en) | 2012-09-07 | 2014-11-04 | Covidien Lp | Display screen with annotate file icon |
| USD717340S1 (en) | 2012-09-07 | 2014-11-11 | Covidien Lp | Display screen with enteral feeding icon |
| US9517184B2 (en) | 2012-09-07 | 2016-12-13 | Covidien Lp | Feeding tube with insufflation device and related methods therefor |
| EP3054860B1 (en) | 2013-10-10 | 2020-07-01 | Nitinotes Ltd. | Endoluminal sleeve gastroplasty |
| US10779979B2 (en) | 2013-10-10 | 2020-09-22 | Nitinotes Ltd. | Endoluminal sleeve gastroplasty |
| US9801563B2 (en) * | 2013-11-06 | 2017-10-31 | The Charles Stark Draper Laboratory, Inc. | Micro-magnetic reporter and systems |
| TWI533834B (zh) * | 2013-12-10 | 2016-05-21 | Ying-Jie Su | Magnetic manipulation of the surgical lighting device and a hand with a lighting function Assisted system |
| WO2015109045A1 (en) * | 2014-01-17 | 2015-07-23 | The General Hospital Corporation | Method and apparatus for acquisition of volumetric imaging data within an anatomic structure |
| US20150346115A1 (en) * | 2014-05-30 | 2015-12-03 | Eric J. Seibel | 3d optical metrology of internal surfaces |
| CN104880410A (zh) * | 2015-06-12 | 2015-09-02 | 上海良友(集团)有限公司 | 储粮生态显微图像采集专用探视管 |
| CN105338703B (zh) * | 2015-11-10 | 2018-05-22 | 常州市巨泰电子有限公司 | 灯具的立式驱动电源 |
| CN205179451U (zh) * | 2015-11-10 | 2016-04-20 | 常州市巨泰电子有限公司 | 灯具的立式驱动电源 |
| GB2546747B (en) * | 2016-01-26 | 2021-04-07 | Ev Offshore Ltd | Optical cap |
| CN106264427B (zh) * | 2016-08-04 | 2018-03-16 | 北京千安哲信息技术有限公司 | 胶囊内窥镜及其控制装置、系统和检测方法 |
| CN106175896A (zh) * | 2016-09-09 | 2016-12-07 | 江苏科沁光电科技有限公司 | 一种电子可视取异物钳 |
| CN106345077A (zh) * | 2016-11-10 | 2017-01-25 | 广州奥方美容设备有限公司 | 超声刀手柄及超声刀美容美体仪 |
| US20200237200A1 (en) * | 2017-09-18 | 2020-07-30 | Veena Moktali | A digital device facilitating body cavity screening and diagnosis |
| US11596313B2 (en) | 2017-10-13 | 2023-03-07 | Arizona Board Of Regents On Behalf Of Arizona State University | Photoacoustic targeting with micropipette electrodes |
| US11944270B1 (en) * | 2017-11-17 | 2024-04-02 | PhotonEdge Inc. | Systems and methods of rotation compensation for brain optical imaging and stimulation |
| US20190282069A1 (en) * | 2018-03-16 | 2019-09-19 | Barbara Smith | Deep brain stimulation electrode with photoacoustic and ultrasound imaging capabilities |
| CN109106323B (zh) * | 2018-08-31 | 2024-03-26 | 上海澳华内镜股份有限公司 | 一种内窥镜照明结构及内窥镜 |
| CN110393499B (zh) * | 2018-08-31 | 2021-12-07 | 上海微创医疗机器人(集团)股份有限公司 | 电子内窥镜及电子内窥镜系统 |
| US11768182B2 (en) | 2019-04-26 | 2023-09-26 | Arizona Board Of Regents On Behalf Of Arizona State University | Photoacoustic and optical microscopy combiner and method of generating a photoacoustic image of a sample |
| US11975327B2 (en) | 2019-06-19 | 2024-05-07 | Arizona Board Of Regents On Behalf Of Arizona State University | Integrated container adapter for photoacoustic microscopy |
| CN113080833B (zh) * | 2019-12-23 | 2023-01-03 | 财团法人工业技术研究院 | 光纤扫描探头及内视镜 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06335450A (ja) * | 1993-05-31 | 1994-12-06 | Olympus Optical Co Ltd | 電子内視鏡装置 |
| JPH10248844A (ja) * | 1997-03-12 | 1998-09-22 | Olympus Optical Co Ltd | 超音波画像診断装置 |
| JPH116904A (ja) * | 1997-06-16 | 1999-01-12 | Reatsukusu:Kk | 孔内観察用回転体レンズとこれを用いたプローブ |
| JP2002095632A (ja) * | 2000-09-22 | 2002-04-02 | Minolta Co Ltd | 内視鏡装置 |
| JP2003093339A (ja) * | 1991-03-11 | 2003-04-02 | Olympus Optical Co Ltd | 画像処理装置 |
| JP2005323889A (ja) * | 2004-05-14 | 2005-11-24 | Olympus Corp | 内視鏡 |
| JP2006235346A (ja) * | 2005-02-25 | 2006-09-07 | Mitsubishi Electric Corp | 内視鏡 |
| JP2008040468A (ja) * | 2006-07-10 | 2008-02-21 | Olympus Corp | 透過光学素子及びそれを用いた光学系 |
Family Cites Families (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3090378A (en) * | 1960-05-16 | 1963-05-21 | Bausch & Lomb | Focusing endoscope |
| US3804081A (en) * | 1971-07-29 | 1974-04-16 | Olympus Optical Co | Endoscope |
| JPS6048011A (ja) * | 1983-08-27 | 1985-03-15 | Olympus Optical Co Ltd | 内視鏡装置 |
| JPS6349125A (ja) * | 1986-08-16 | 1988-03-01 | 奥津 一郎 | 内視鏡用案内管 |
| JP2848570B2 (ja) | 1989-12-21 | 1999-01-20 | オリンパス光学工業株式会社 | 側視型電子内視鏡 |
| US6134003A (en) * | 1991-04-29 | 2000-10-17 | Massachusetts Institute Of Technology | Method and apparatus for performing optical measurements using a fiber optic imaging guidewire, catheter or endoscope |
| US5191879A (en) * | 1991-07-24 | 1993-03-09 | Welch Allyn, Inc. | Variable focus camera for borescope or endoscope |
| US5976076A (en) * | 1995-02-22 | 1999-11-02 | Kolff; Jack | Stereo laparoscope with synchronized optics |
| US6007484A (en) * | 1995-09-15 | 1999-12-28 | Image Technologies Corporation | Endoscope having elevation and azimuth control of camera |
| US6413209B1 (en) * | 1995-09-15 | 2002-07-02 | Med Images, Inc. | Imaging system with condensation control |
| US6428470B1 (en) * | 1995-09-15 | 2002-08-06 | Pinotage, Llc | Imaging system and components thereof |
| JP3549321B2 (ja) | 1996-01-24 | 2004-08-04 | 株式会社町田製作所 | 内視鏡 |
| US5782752A (en) * | 1996-04-05 | 1998-07-21 | Vista Medical Technologies, Inc. | Device for carrying two units in end to end disposition and for moving one of the units alongside the other of the units |
| JP3662072B2 (ja) | 1996-06-07 | 2005-06-22 | オリンパス株式会社 | 医療用カプセル装置 |
| US5879289A (en) * | 1996-07-15 | 1999-03-09 | Universal Technologies International, Inc. | Hand-held portable endoscopic camera |
| JPH1156774A (ja) | 1997-06-09 | 1999-03-02 | Matsushita Electric Ind Co Ltd | 撮像装置 |
| WO1999007139A1 (en) * | 1997-07-30 | 1999-02-11 | Pinotage, L.L.C. | Imaging device |
| US6478730B1 (en) * | 1998-09-09 | 2002-11-12 | Visionscope, Inc. | Zoom laparoscope |
| US6641530B2 (en) * | 1998-12-14 | 2003-11-04 | Fuji Photo Optical Co., Ltd. | Endoscope with objective lens drive mechanism |
| US6687010B1 (en) * | 1999-09-09 | 2004-02-03 | Olympus Corporation | Rapid depth scanning optical imaging device |
| US6767321B2 (en) * | 1999-10-04 | 2004-07-27 | Robert Czarnek | Stereo laparoscope with discrete working distance |
| US20020103420A1 (en) * | 2001-01-26 | 2002-08-01 | George Coleman | Endoscope with alterable viewing angle |
| US20020133077A1 (en) * | 2001-03-14 | 2002-09-19 | Edwardsen Stephen Dodge | Transesophageal ultrasound probe having a rotating endoscope shaft |
| JP2002282201A (ja) * | 2001-03-28 | 2002-10-02 | Asahi Optical Co Ltd | 対物光学系移動機構付き電子内視鏡 |
| WO2003038410A1 (fr) * | 2001-10-31 | 2003-05-08 | Olympus Corporation | Dispositif d'observation de type lecteur optique |
| FR2832516B1 (fr) * | 2001-11-19 | 2004-01-23 | Tokendo Sarl | Endoscopes rotatifs a visee distale deviee |
| JP2003279862A (ja) | 2002-03-25 | 2003-10-02 | Machida Endscope Co Ltd | 全方位内視鏡装置 |
| US20040097791A1 (en) * | 2002-11-13 | 2004-05-20 | Olympus Corporation | Endoscope |
| US7559890B2 (en) * | 2003-02-26 | 2009-07-14 | Ikona Medical Corporation | Endoscopic imaging of an organ system |
| EP1620012B1 (en) * | 2003-05-01 | 2012-04-18 | Given Imaging Ltd. | Panoramic field of view imaging device |
| JP4398184B2 (ja) | 2003-06-24 | 2010-01-13 | オリンパス株式会社 | 内視鏡 |
| WO2005110189A1 (ja) | 2004-05-14 | 2005-11-24 | Olympus Corporation | 内視鏡 |
| US8878924B2 (en) * | 2004-09-24 | 2014-11-04 | Vivid Medical, Inc. | Disposable microscope and portable display |
| US8556806B2 (en) * | 2004-09-24 | 2013-10-15 | Vivid Medical, Inc. | Wavelength multiplexing endoscope |
| US9033870B2 (en) * | 2004-09-24 | 2015-05-19 | Vivid Medical, Inc. | Pluggable vision module and portable display for endoscopy |
| US8827899B2 (en) * | 2004-09-24 | 2014-09-09 | Vivid Medical, Inc. | Disposable endoscopic access device and portable display |
| US8480566B2 (en) | 2004-09-24 | 2013-07-09 | Vivid Medical, Inc. | Solid state illumination for endoscopy |
| US8602971B2 (en) * | 2004-09-24 | 2013-12-10 | Vivid Medical. Inc. | Opto-Electronic illumination and vision module for endoscopy |
| US8858425B2 (en) * | 2004-09-24 | 2014-10-14 | Vivid Medical, Inc. | Disposable endoscope and portable display |
| DE102005063620B3 (de) * | 2004-11-09 | 2017-03-09 | Denso Corporation | Doppelwandiges Rohr |
| JP2007061296A (ja) | 2005-08-30 | 2007-03-15 | Pentax Corp | 電子内視鏡用受信モジュール及び画像処理装置 |
| JP4545696B2 (ja) * | 2005-09-30 | 2010-09-15 | 富士フイルム株式会社 | 光プローブ |
| US20070191682A1 (en) * | 2006-02-15 | 2007-08-16 | Jannick Rolland | Optical probes for imaging narrow vessels or lumens |
| US7627208B2 (en) * | 2007-04-23 | 2009-12-01 | Fujifilm Corporation | Optical probe and optical tomography apparatus |
| US20100013910A1 (en) * | 2008-07-21 | 2010-01-21 | Vivid Medical | Stereo viewer |
-
2009
- 2009-06-15 EP EP09766622.6A patent/EP2294965A4/en not_active Withdrawn
- 2009-06-15 WO PCT/JP2009/060885 patent/WO2009154174A1/ja active Application Filing
- 2009-06-15 US US12/999,815 patent/US8512231B2/en not_active Expired - Fee Related
-
2013
- 2013-02-08 US US13/763,485 patent/US20130155214A1/en not_active Abandoned
- 2013-02-08 US US13/763,468 patent/US20130147934A1/en not_active Abandoned
- 2013-02-08 US US13/763,502 patent/US20130147935A1/en not_active Abandoned
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003093339A (ja) * | 1991-03-11 | 2003-04-02 | Olympus Optical Co Ltd | 画像処理装置 |
| JPH06335450A (ja) * | 1993-05-31 | 1994-12-06 | Olympus Optical Co Ltd | 電子内視鏡装置 |
| JPH10248844A (ja) * | 1997-03-12 | 1998-09-22 | Olympus Optical Co Ltd | 超音波画像診断装置 |
| JPH116904A (ja) * | 1997-06-16 | 1999-01-12 | Reatsukusu:Kk | 孔内観察用回転体レンズとこれを用いたプローブ |
| JP2002095632A (ja) * | 2000-09-22 | 2002-04-02 | Minolta Co Ltd | 内視鏡装置 |
| JP2005323889A (ja) * | 2004-05-14 | 2005-11-24 | Olympus Corp | 内視鏡 |
| JP2006235346A (ja) * | 2005-02-25 | 2006-09-07 | Mitsubishi Electric Corp | 内視鏡 |
| JP2008040468A (ja) * | 2006-07-10 | 2008-02-21 | Olympus Corp | 透過光学素子及びそれを用いた光学系 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2294965A4 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CZ306728B6 (cs) * | 2011-02-03 | 2017-05-31 | Karel Dušek | Zařízení pro lékařské vyšetření, zejména koloskopii |
| JP2022051712A (ja) * | 2020-09-21 | 2022-04-01 | プキョン ナショナル ユニバーシティ インダストリー-ユニバーシティ コーポレーション ファウンデーション | 子宮頸癌早期診断のためのモバイル膣拡大鏡装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130147934A1 (en) | 2013-06-13 |
| US8512231B2 (en) | 2013-08-20 |
| US20130155214A1 (en) | 2013-06-20 |
| US20130147935A1 (en) | 2013-06-13 |
| EP2294965A1 (en) | 2011-03-16 |
| EP2294965A4 (en) | 2014-03-12 |
| US20110098530A1 (en) | 2011-04-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2009154174A1 (ja) | 電子内視鏡 | |
| JP4550048B2 (ja) | パノラマ視野の撮像装置 | |
| US20190183323A1 (en) | Radial scanner imaging system | |
| JP2009240634A (ja) | 内視鏡装置 | |
| JP2006304867A (ja) | カプセル型内視鏡 | |
| JP2005319315A (ja) | パノラミックビューを有する内視鏡 | |
| CN201042429Y (zh) | 可控移动无线电药丸式内窥系统 | |
| JP5193694B2 (ja) | 内視鏡及び内視鏡の作動方法 | |
| JP5276907B2 (ja) | 内視鏡 | |
| JP2009297426A (ja) | 電子内視鏡 | |
| JP5210719B2 (ja) | 電子内視鏡及び画像処理プログラム | |
| JP2009297415A (ja) | 電子内視鏡及び画像処理プログラム | |
| JP2009297410A (ja) | 内視鏡 | |
| JP5244471B2 (ja) | 電子内視鏡 | |
| JP5481549B2 (ja) | 内視鏡 | |
| JP5171417B2 (ja) | 電子内視鏡 | |
| JP2009297420A (ja) | 内視鏡 | |
| JP5171418B2 (ja) | 内視鏡 | |
| JP5634478B2 (ja) | 内視鏡 | |
| JP5103293B2 (ja) | 電子内視鏡 | |
| JP5171416B2 (ja) | 内視鏡 | |
| JP2009297427A (ja) | 電子内視鏡 | |
| JP4491316B2 (ja) | 口腔内撮影装置 | |
| JP2009297425A (ja) | 電子内視鏡 | |
| JP2009297412A (ja) | 電子内視鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09766622 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2009766622 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 12999815 Country of ref document: US Ref document number: 2009766622 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |