RU2755208C2 - Гибридный асинхронный электродвигатель с самовыравнивающимся гибридным ротором на основе индукции и постоянных магнитов - Google Patents
Гибридный асинхронный электродвигатель с самовыравнивающимся гибридным ротором на основе индукции и постоянных магнитов Download PDFInfo
- Publication number
- RU2755208C2 RU2755208C2 RU2019129732A RU2019129732A RU2755208C2 RU 2755208 C2 RU2755208 C2 RU 2755208C2 RU 2019129732 A RU2019129732 A RU 2019129732A RU 2019129732 A RU2019129732 A RU 2019129732A RU 2755208 C2 RU2755208 C2 RU 2755208C2
- Authority
- RU
- Russia
- Prior art keywords
- rotor
- rods
- squirrel cage
- stator
- electric motor
- Prior art date
Links
- 230000006698 induction Effects 0.000 title description 17
- 230000005291 magnetic effect Effects 0.000 claims abstract description 79
- 230000001360 synchronised effect Effects 0.000 claims abstract description 34
- 230000004888 barrier function Effects 0.000 claims abstract description 17
- 241000555745 Sciuridae Species 0.000 claims description 64
- 230000001939 inductive effect Effects 0.000 claims description 17
- 230000004907 flux Effects 0.000 claims description 10
- 230000003993 interaction Effects 0.000 abstract description 8
- 230000000694 effects Effects 0.000 abstract description 3
- 238000004870 electrical engineering Methods 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 8
- 229910052802 copper Inorganic materials 0.000 description 8
- 239000010949 copper Substances 0.000 description 8
- 239000000463 material Substances 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 239000004020 conductor Substances 0.000 description 5
- 238000004804 winding Methods 0.000 description 5
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 239000003302 ferromagnetic material Substances 0.000 description 3
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 2
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- MDIACHVOJQLAOR-ZYDGDJLBSA-N [(7r,8s,9s,10s,13s,14s,17r)-17-ethynyl-10-hydroperoxy-7,13-dimethyl-3-oxo-2,6,7,8,9,11,12,14,15,16-decahydro-1h-cyclopenta[a]phenanthren-17-yl] heptanoate Chemical compound C([C@H]1C)C2=CC(=O)CC[C@]2(OO)[C@@H]2[C@@H]1[C@@H]1CC[C@](C#C)(OC(=O)CCCCCC)[C@@]1(C)CC2 MDIACHVOJQLAOR-ZYDGDJLBSA-N 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 229910017052 cobalt Inorganic materials 0.000 description 2
- 239000010941 cobalt Substances 0.000 description 2
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 2
- 239000003562 lightweight material Substances 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 229910000906 Bronze Inorganic materials 0.000 description 1
- 229920000271 Kevlar® Polymers 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 239000010974 bronze Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- KUNSUQLRTQLHQQ-UHFFFAOYSA-N copper tin Chemical compound [Cu].[Sn] KUNSUQLRTQLHQQ-UHFFFAOYSA-N 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 229910001172 neodymium magnet Inorganic materials 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 229910052761 rare earth metal Inorganic materials 0.000 description 1
- 150000002910 rare earth metals Chemical class 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/223—Rotor cores with windings and permanent magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/24—Rotor cores with salient poles ; Variable reluctance rotors
- H02K1/246—Variable reluctance rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
- H02K16/02—Machines with one stator and two or more rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K17/00—Asynchronous induction motors; Asynchronous induction generators
- H02K17/02—Asynchronous induction motors
- H02K17/16—Asynchronous induction motors having rotors with internally short-circuited windings, e.g. cage rotors
- H02K17/165—Asynchronous induction motors having rotors with internally short-circuited windings, e.g. cage rotors characterised by the squirrel-cage or other short-circuited windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K17/00—Asynchronous induction motors; Asynchronous induction generators
- H02K17/02—Asynchronous induction motors
- H02K17/16—Asynchronous induction motors having rotors with internally short-circuited windings, e.g. cage rotors
- H02K17/20—Asynchronous induction motors having rotors with internally short-circuited windings, e.g. cage rotors having deep-bar rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K17/00—Asynchronous induction motors; Asynchronous induction generators
- H02K17/02—Asynchronous induction motors
- H02K17/26—Asynchronous induction motors having rotors or stators designed to permit synchronous operation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/02—Synchronous motors
- H02K19/10—Synchronous motors for multi-phase current
- H02K19/103—Motors having windings on the stator and a variable reluctance soft-iron rotor without windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/02—Synchronous motors
- H02K19/14—Synchronous motors having additional short-circuited windings for starting as asynchronous motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/46—Motors having additional short-circuited winding for starting as an asynchronous motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/16—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields
- H02K5/173—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings
- H02K5/1732—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings radially supporting the rotary shaft at both ends of the rotor
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Induction Machinery (AREA)
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
Изобретение относится к электротехнике. Технический результат заключается в повышении эффективности. Гибридный асинхронный электродвигатель 10 содержит неподвижный статор 16, независимо вращающийся внешний ротор 20 и внутренний ротор 30, закрепленный на валу 14 электродвигателя. Внешний ротор 20 выполнен с возможностью создания низкого момента инерции и содержит расположенные через угловые промежутки первые стержни 26а, 26b и постоянные магниты 22, расположенные на внутренней поверхности внешнего ротора 20. Внутренний ротор 30 содержит расположенные через угловые промежутки вторые стержни 32а и 32b и внутренние барьеры 38 потока, выровненные со вторыми стержнями 32а и 32b. Внешний ротор 20 сначала ускоряется за счет взаимодействия вращающегося магнитного поля статора с первыми стержнями. По мере ускорения внешнего ротора 20 до синхронной частоты вращения вращающееся магнитное поле статора взаимодействует со вторыми стержнями внутреннего ротора 30 для ускорения внутреннего ротора 30. При по существу синхронной частоте вращения вращающееся магнитное поле статора проходит через внешний ротор 20 во внутренний ротор 30, связывая эти два ротора 20, 30 для эффективной работы постоянных магнитов. 3 н. и 17 з.п. ф-лы, 27 ил.
Description
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет по заявке на патент США с серийным номером 15/438,023, поданной 21 февраля 2017, которая полностью включена в настоящую заявку посредством ссылки.
Область техники
[0002] Настоящее изобретение относится к электродвигателям и, в частности, к асинхронному электродвигателю, имеющему независимо вращающийся ротор на основе постоянных магнитов, связанный изменяемым образом с индуктивным ротором для изменения конфигурации электродвигателя с работы в асинхронном индукционном режиме при пуске на синхронную работу после пуска для обеспечения эффективной работы.
Уровень техники
[0003] Предпочтительной формой электродвигателей являются бесщеточные асинхронные электродвигатели переменного тока. Роторы асинхронных электродвигателей содержат клетку (или беличью клетку, похожую на "беличье колесо"), вращающуюся внутри статора. Клетка содержит стержни, проходящие в осевом направлении и расположенные через угловые промежутки на внешнем периметре ротора. В результате подачи переменного тока на статор происходит ввод вращающегося магнитного поля статора в ротор, и это вращающееся поле индуктивно наводит ток в стержнях. Ток, наводимый в стержнях, создает индуцированное магнитное поле, которое взаимодействует с магнитным полем статора для создания крутящего момента и, таким образом, для вращения ротора.
[0004] Ввод тока в стержни требует отсутствия движения (или вращения) стержней синхронно с вращающимся магнитным полем статора, поскольку для электромагнитной индукции необходимо относительное перемещение (называемое проскальзыванием) между магнитным полем и проводником в этом поле. В результате ротор должен проскальзывать относительно вращающегося магнитного поля статора для наведения тока в стержнях, чтобы создавать крутящий момент, и поэтому индукционные электродвигатели называются асинхронными электродвигателями.
[0005] К сожалению, асинхронные электродвигатели низкой мощности не имеют высокой эффективности при расчетной рабочей скорости и еще менее эффективны при меньших нагрузках, поскольку величина энергии, потребляемой статором, остается постоянной при таких меньших нагрузках.
[0006] Один подход к повышению эффективности асинхронного электродвигателя заключался в добавлении к ротору постоянных магнитов. Пуск электродвигателя сначала происходит как у обычного асинхронного электродвигателя, но при достижении электродвигателем своей рабочей частоты вращения магнитное поле статора вступает во взаимодействие с постоянными магнитами, и электродвигатель входит в синхронный режим. К сожалению, постоянные магниты создают переходный тормозной момент и нежелательные аномалии до тех пор, пока не произойдет синхронизация вследствие изменения выравнивания магнитных полюсов между статором и короткозамкнутым ротором на постоянных магнитах. Кроме того, постоянные магниты ограничены по размеру, т.к. если постоянные магниты будут слишком большими, то они будут создавать слишком высокий поток статора, что приведет к неудовлетворительному или неудачному пуску электродвигателя. Такое ограничение размера ограничивает полезный эффект, получаемый от добавления постоянных магнитов.
[0007] В патентной заявке США с серийным номером 14/151,333, поданной 9 января 2014 года заявителем настоящей заявки, раскрыт электродвигатель, имеющий внешний статор, внутренний ротор, содержащий стержни, жестко закрепленные на валу электродвигателя, и свободно вращающийся внешний ротор, содержащий постоянные магниты и стержни и распложенный между внутренним ротором и статором. При пуске, под действием вращающегося магнитного поля статора происходит ускорение свободно вращающегося внешнего ротора, и после ускорения происходит ускорение и последующая блокировка постоянных магнитов свободно вращающегося внешнего ротора под действием внутреннего ротора для достижения эффективной работы постоянных магнитов.
[0008] Конструкция согласно заявке 14/151,333 применима для некоторых конструкций электродвигателя, однако в других конструкциях поверхностные эффекты на поверхности внутреннего ротора ухудшают связь внутреннего ротора с вращающимися магнитными полями.
Раскрытие сущности изобретения
[0009] Настоящее изобретение удовлетворяет вышеуказанные и другие потребности путем создания гибридного асинхронного электродвигателя, содержащего неподвижный статор, независимо вращающийся внешний ротор и внутренний ротор, закрепленный на валу электродвигателя. Внешний ротор выполнен с возможностью создания низкого момента инерции и содержит расположенные через угловые промежутки первые стержни и постоянные магниты, расположенные на внутренней поверхности внешнего ротора. Внутренний ротор содержит расположенные через угловые промежутки вторые стержни и внутренние барьеры потока, выровненные со вторыми стержнями. Внешний ротор сначала ускоряется за счет взаимодействия вращающегося магнитного поля статора с первыми стержнями. По мере ускорения внешнего ротора до синхронной частоты вращения, вращающееся магнитное поле постоянных магнитов взаимодействует со вторыми стержнями внутреннего ротора для ускорения внутреннего ротора. При по существу синхронной частоте вращения вращающееся магнитное поле статора проходит через внешний ротор и проникает во внутренний ротор, связывая два этих ротора для эффективной работы постоянных магнитов.
[0010] Согласно одному аспекту настоящего изобретения, предложен гибридный асинхронный электродвигатель, который содержит неподвижный статор, независимо вращающийся внешний HPMSC-ротор (Hybrid Permanent Magnet/Squirrel Cage outer rotor, гибридный внешний ротор на основе постоянных магнитов и беличьей клетки) и внутренний SC-ротор (Squirrel Cage inner rotor, внутренний ротор на основе беличьей клетки), закрепленный на валу электродвигателя. Внешний HPMSC-ротор имеет множество первых стержней, расположенных через угловые промежутки вблизи внешней поверхности внешнего HPMSC-ротора, и множество постоянных магнитов, расположенных на внутренней поверхности внешнего HPMSC-ротора. Внутренний SC-ротор имеет множество вторых стержней, расположенных через угловые промежутки вблизи внешней поверхности внутреннего SC-ротора, и барьеры магнитного потока, выровненные со вторыми стержнями в слоистом материале ротора. Барьеры потока формируют линии магнитного потока статора через внешний HPMSC-ротор и внутренний SC-ротор при синхронной частоте вращения для связи внешнего HPMSC-ротора и внутреннего SC-ротора.
[0011] Внешний HPMSC-ротор сначала ускоряется за счет взаимодействия вращающегося магнитного поля статора с первыми стержнями. После начала вращения внешнего HPMSC-ротора постоянные магниты создают вращающееся магнитное поле во внутреннем SC-роторе, взаимодействующее со вторыми стержнями, для ускорения внутреннего SC-ротора. По мере ускорения внешнего HPMSC-ротора до синхронной частоты вращения, магнитное поле статора проходит через внешний HPMSC-ротор и взаимодействует с постоянными магнитами, а также проникает во внутренний SC-ротор, связывая внешний HPMSC-ротор и внутренний SC-ротор для перехода к синхронной работе.
[0012] Согласно еще одному аспекту настоящего изобретения, предложен электродвигатель, имеющий более мощные постоянные магниты, которые известны как LSPM (Line Start Permanent Magnet, постоянные магниты с пуском от сети). Известные LSPM-электродвигатели ограничены тормозным и пульсационным моментами, создаваемыми постоянными магнитами. Первые стержни и магниты внешнего HPMSC-ротора являются легкими, и внешний HPMSC-ротор отсоединяется от вала электродвигателя и нагрузки при пуске, так что обеспечивается возможность применения более мощных постоянных магнитов, чем в известных LSPM-двигателях. Более мощные постоянные магниты обеспечивают повышенную эффективность.
[0013] Согласно еще одному аспекту настоящего изобретения, предложен электродвигатель, имеющий внешние стержни внешнего HPMSC-ротора, выровненные с внутренними стержнями внутреннего SC-ротора. При синхронной частоте вращения линии вращающегося магнитного поля статора проходят между выровненными стержнями и проникают во внутренний SC-ротор, связывая внешний HPMSC-ротор и внутренний SC-ротор.
[0014] Согласно еще одному аспекту настоящего изобретения, предложен электродвигатель, имеющий несколько больших стержней беличьей клетки в сочетании с меньшими стержнями беличьей клетки внешнего HPMSC-ротора. Большие стержни повышают конструктивную прочность внешнего HPMSC-ротора.
[0015] Согласно еще одному аспекту настоящего изобретения, предложен способ согласно настоящему изобретению. Способ включает этапы, на которых: подают электрический ток на статор; создают вращающееся магнитное поле статора; обеспечивают индуктивное взаимодействие вращающегося магнитного поля статора с беличьей клеткой внешнего HPMSC-ротора; с помощью вращающегося магнитного поля статора ускоряют внешний HPMSC-ротор; с помощью постоянных магнитов внешнего HPMSC-ротора создают вращающееся постоянное магнитное поле; обеспечивают индуктивное взаимодействие вращающегося постоянного магнитного поля с беличьей клеткой внутреннего SC-ротора; достигают синхронной частоты вращения внешнего HPMSC-ротора и внутреннего SC-ротора; и обеспечивают магнитную связь внешнего HPMSC-ротора и внутреннего SC-ротора при синхронной частоте вращения.
[0016] Согласно еще одному аспекту настоящего изобретения, предложен гибридный асинхронный электродвигатель согласно настоящему изобретению, содержащий внешний НРМН-ротор (Hybrid Permanent Magnet Hysteresis outer rotor, гибридный внешний ротор на основе гистерезиса постоянных магнитов). Индуктивный пусковой элемент в виде кольца вихревых токов (или гистерезиса) заменяет беличью клетку внешнего HPMSC-ротора для создания начального пускового момента. После достижения внешним НРМН-ротором синхронной частоты вращения индуктивный пусковой элемент не оказывает влияния на работу электродвигателя. Кольцо вихревых токов может представлять собой любой электропроводный материал, потенциально способный служить материалом для пускового элемента и обычно представляющий собой твердый хром или кобальтовую сталь, однако возможны любые неферромагнитные материалы. Предпочтительным материалом для кольца внешнего НРМН-ротора согласно настоящему изобретению является медь, которая эффективна благодаря своей высокой удельной электропроводности. Серебро показывает несколько лучшие рабочие характеристики, чем медь, благодаря более высокой удельной электропроводности, а алюминий показывает худшие рабочие характеристики, чем медь, вследствие более низкой удельной электропроводности. Новые нанотехнологии и новые виды электропроводных материалов потенциально способны обеспечить лучшие рабочие характеристики, чем медь.
Краткое описание чертежей
[0017] Вышеуказанные и другие аспекты, признаки и преимущества настоящего изобретения станут более понятны из нижеследующего более конкретного их описания, представленного в сочетании с нижеследующими чертежами, на которых:
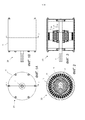
[0018] На ФИГ. 1А показан вид с торца электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, согласно настоящему изобретению.
[0019] На ФИГ. 1В показан вид сбоку электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, согласно настоящему изобретению.
[0020] На ФИГ. 2 показано поперечное сечение электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, по линии 2-2 на ФИГ. 1В, согласно настоящему изобретению.
[0021] На ФИГ. 3 показано поперечное сечение электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, по линии 3-3 на ФИГ. 1А, согласно настоящему изобретению.
[0022] На ФИГ. 4 показано поперечное сечение кожуха и неподвижной статорной части электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, по линии 2-2 на ФИГ. 1В, согласно настоящему изобретению.
[0023] На ФИГ. 5 показано поперечное сечение кожуха и неподвижной статорной части электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, по линии 5-5 на ФИГ. 4, согласно настоящему изобретению.
[0024] На ФИГ. 6 показано поперечное сечение независимо вращающегося внешнего HPMSC-ротора электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, по линии 2-2 на ФИГ. 1В, согласно настоящему изобретению.
[0025] На ФИГ. 7 показано поперечное сечение независимо вращающегося внешнего HPMSC-ротора электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, по линии 7-7 на ФИГ. 6, согласно настоящему изобретению.
[0026] На ФИГ. 8 показано поперечное сечение внутреннего SC-ротора электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, по линии 2-2 на ФИГ. 1В, согласно настоящему изобретению.
[0027] На ФИГ. 9 показано поперечное сечение внутреннего SC-ротора электродвигателя, имеющего независимо вращающийся внешний HPMSC-ротор и внутренний SC-ротор, жестко связанный с валом электродвигателя, по линии 9-9 на ФИГ. 8, согласно настоящему изобретению.
[0028] На ФИГ. 10 показано поперечное сечение шестого варианта осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, согласно настоящему изобретению.
[0029] На ФИГ. 10А показано поперечное сечение статора в шестом варианте осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, согласно настоящему изобретению.
[0030] На ФИГ. 10В показано поперечное сечение гибридного внешнего ротора на основе индукции и постоянных магнитов в шестом варианте осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, согласно настоящему изобретению.
[0031] На ФИГ. 10С показано поперечное сечение внутреннего индуктивного ротора в шестом варианте осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, согласно настоящему изобретению.
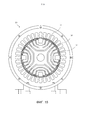
[0032] На ФИГ. 11А показаны линии магнитного поля в шестом варианте осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, согласно настоящему изобретению.
[0033] На ФИГ. 11В показаны линии магнитного поля в шестом варианте осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, при синхронной частоте вращения, согласно настоящему изобретению.
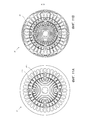
[0034] На ФИГ. 12А показаны линии магнитного поля в двухполюсной конфигурации шестого варианта осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, при синхронной частоте вращения, без статора, согласно настоящему изобретению.
[0035] На ФИГ. 12В показаны линии магнитного поля в четырехполюсной конфигурации шестого варианта осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, при синхронной частоте вращения, без статора, согласно настоящему изобретению.
[0036] На ФИГ. 12С показаны линии магнитного поля в шестиполюсной конфигурации шестого варианта осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, при синхронной частоте вращения, без статора, согласно настоящему изобретению.
[0037] На ФИГ. 12D показаны линии магнитного поля в восьмиполюсной конфигурации шестого варианта осуществления электродвигателя, имеющего гибридный внешний ротор на основе индукции и постоянных магнитов, при синхронной частоте вращения, без статора, согласно настоящему изобретению.
[0038] На ФИГ. 13 показан способ согласно настоящему изобретению.
[0039] На ФИГ. 14 показаны графики изменения частоты вращения в зависимости от времени согласно настоящему изобретению.
[0040] На ФИГ. 15 показано поперечное сечение варианта осуществления настоящего изобретения, содержащего внешний НРМН-ротор.
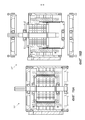
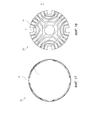
[0041] На ФИГ. 16А показан вид поперечного сечения варианта осуществления настоящего изобретения, содержащего внешний НРМН-ротор.
[0042] На ФИГ. 16В показан покомпонентный вид сбоку поперечного сечения варианта осуществления настоящего изобретения, содержащего внешний НРМН-ротор.
[0043] На ФИГ. 17 показан вид сбоку поперечного сечения внешнего НРМН-ротора согласно настоящему изобретению.
[0044] На ФИГ. 18 показан вид сбоку поперечного сечения второго внутреннего SC-ротора согласно настоящему изобретению.
[0045] Соответствующие ссылочные символы обозначают соответствующие компоненты по всем видам на чертежах.
Осуществление изобретения
[0046] Нижеследующее описание представляет наилучший режим, предполагаемый в настоящее время для осуществления настоящего изобретения. Настоящее описание должно истолковываться не в ограничивающем смысле, а как предназначенное лишь для целей раскрытия одного или более предпочтительных вариантов осуществления настоящего изобретения. Объем настоящего изобретения должен быть определен со ссылкой на формулу изобретения.
[0047] Термин «механически не связан» используется в настоящем документе для описания соединения первой конструкции со второй конструкцией посредством подшипников при отсутствии какого-либо другого механического/материального соединения между первой и второй конструкциями. Тем не менее, указанные конструкции могут быть связаны посредством магнитного соединения, которое не рассматривается как механическое соединение в настоящей патентной заявке.
[0048] На ФИГ. 1А показан вид с торца электродвигателя 10, имеющего независимо вращающийся внешний HPMSC-ротор 20 и внутренний SC-ротор 30, жестко связанный с валом электродвигателя, а на ФИГ. 10В показан вид сбоку электродвигателя 10. На ФИГ. 2 показано поперечное сечение электродвигателя 10 по линии 2-2 на ФИГ. 1В, и на ФИГ. 3 показано поперечное сечение электродвигателя 10 по линии 3-3 на ФИГ. 1А. Электродвигатель 10 содержит кожух 12, статорную часть 16, жестко связанную с кожухом 12, независимо вращающийся внешний HPMSC-ротор 20, опирающийся на подшипники 29 (см. ФИГ. 7), и внутренний SC-ротор 30, жестко закрепленный на валу 14 электродвигателя. Внешний HPMSC-ротор 20 установлен на валу 14 электродвигателя посредством подшипников и механически не связан для вращения с валом 14 электродвигателя.
[0049] На ФИГ. 4 показано поперечное сечение кожуха 12 и неподвижной статорной части 16 электродвигателя 10 по линии 2-2 на ФИГ. 1В, и на ФИГ. 5 показано поперечное сечение кожуха 12 и неподвижной статорной части 16 по линии 5-5 на ФИГ. 4. Обмотки 18 неподвижного статора расположены в сердечнике 19 статора. Обмотки 18 статора создают вращающееся магнитное поле статора при подаче на них сигнала переменного тока (АС). Кожух 12 содержит подшипники 13 для поддержки вала 14.
[0050] На ФИГ. 6 показано поперечное сечение независимо вращающегося внешнего HPMSC-ротора 20 по линии 2-2 на ФИГ. 1В, и на ФИГ. 7 показано поперечное сечение независимо вращающегося внешнего HPMSC-ротора 20 по линии 7-7 на ФИГ. 6. Внешний HPMSC-ротор 20 содержит постоянные магниты 22, расположенные через угловые промежутки на внутренней поверхности внешнего HPMSC-ротора 20, и первые стержни 26а и 26b, расположенные через угловые промежутки вблизи внешней поверхности внешнего HPMSC-ротора 20 и встроенные в сердечник (или слоистый материал) 23. Внешний HPMSC-ротор 20 может содержать любое четное количество постоянных магнитов 22, например два, четыре, шесть, восемь и т.д. постоянных магнитов 22 (см. ФИГ. 12A-12D). В сердечнике 23 ротора между постоянными магнитами 22 расположены неферромагнитные пустоты 24. Пустоты 24 представляют собой воздушные зазоры или неферромагнитный материал для обеспечения барьеров потока; если бы между магнитами 22 находился ферромагнитный материал, магнитный поток закручивался бы обратно в магниты 22, закорачивая большую часть линий магнитного потока обратно в магниты 22. Сердечник 23 предпочтительно представляет собой слоистый сердечник, и тонкие слои 23а сердечника, образующие сердечник 23, могут приводить к утечке потока. Толщина слоев 23а предпочтительно оптимизирована для минимизации утечки при сохранении механической целостности слоев 23а сердечника ротора. Стержни 26а и 26b предпочтительно расположены через равные угловые промежутки. Магниты 22 предпочтительно представляют собой неодимовые магниты, прикрепленные к внутренней поверхности сердечника 23 ротора.
[0051] Внешний HPMSC-ротор 20 может содержать лишь малые стержни 26а, однако предпочтительно он также содержит большие стержни 26b, обеспечивающие конструктивную прочность. Большие стержни 26b предпочтительно расположены через угловые промежутки (т.е. они могут быть разнесены в радиальном направлении) между постоянными магнитами 22, и количество больших стержней 26b предпочтительно совпадает с количеством магнитов 22. Пустоты 24 предпочтительно расположены под большими стержнями 26b. Стержни 26а и 26b предпочтительно изготовлены из легкого материала, например алюминия. Магниты 22 также предпочтительно изготовлены из легкого материала, и предпочтительно они являются редкоземельными магнитами, что позволяет сделать магнит более легким при заданной мощности магнита. Благодаря легкости стержней 26а и 26b и магнитов 22, снижается момент инерции внешнего HPMSC-ротора 20, что позволяет использовать более мощные постоянные магниты 22 и обеспечить более высокую эффективность, чем в случае LSPM-электродвигателя. Баланс между сопротивлением стержней 26а и 26b и насыщением сердечника 23 ротора может быть оптимизирован, и форма, количество и размеры стержней 26а и 26b могут иметь большое влияние на рабочие характеристики, например, на пуск электродвигателя.
[0052] Торцевые крышки 28 ротора прикреплены к противоположным концам внешнего HPMSC-ротора 20 и содержат подшипники 29, обеспечивающие возможность свободного вращения внешнего HPMSC-ротора 20 на валу 14 электродвигателя. Подшипники 29 предпочтительно представляют собой подшипники с низким трением (например, шарикоподшипники или роликовые подшипники), однако они также могут представлять собой просто втулки (например, бронзовые втулки, самосмазывающиеся втулки или кевларовые® втулки). Внешний HPMSC-ротор 20 ни в какой момент времени механически не связан для вращения с внутренним SC-ротором 30 или с валом 14 электродвигателя.
[0053] На ФИГ. 8 показано поперечное сечение внутреннего SC-ротора 30 электродвигателя 10 по линии 2-2 на ФИГ. 1В, и на ФИГ. 9 показано поперечное сечение внутреннего SC-ротора 30 электродвигателя 10 по линии 9-9 на ФИГ. 8. Внутренний SC-ротор 30 закреплен на валу 14 электродвигателя и взаимодействует с внешним HPMSC-ротором 20 для магнитной связи внешнего HPMSC-ротора 20 с валом 14 электродвигателя при синхронной частоте вращения. Вторые малые стержни 32а и большие стержни 32b расположены в сердечнике (или слоистом материале) 36 второго ротора. Стержни 32а и 32b необязательно, но предпочтительно расположены через равные угловые промежутки. Большие стержни 32b повышают конструктивную прочность внутреннего SC-ротора 30 и содействуют направлению линий магнитного потока 50 (см. ФИГ. 11В).
[0054] На ФИГ. 10 показано поперечное сечение электродвигателя 10, на ФИГ. 10А показано поперечное сечение статора 16 электродвигателя 10, на ФИГ. 10В показано поперечное сечение внешнего HPMSC-ротора 20 электродвигателя 10, и на ФИГ. 10С показано поперечное сечение внутреннего SC-ротора 30 электродвигателя 10. Статор 16 содержит обмотки 18 статора в слоистом материале 19, создающие вращающееся магнитное поле статора.
[0055] Внешний HPMSC-ротор 20 связан с возможностью вращения с валом электродвигателя через подшипники 29 (см. ФИГ. 7) и содержит малые стержни 26а беличьей клетки и большие стержни 26b беличьей клетки, причем стержни 26а и 26b встроены в слоистый материал 23. Постоянные магниты 24 расположены на внутренней поверхности внешнего HPMSC-ротора 20, обращенной к внутреннему SC-ротору 30.
[0056] Внутренний SC-ротор 30 содержит малые стержни 32а и большие стержни 32b. Барьеры 38 потока проходят в виде вогнутых каналов через слоистый материал 36, и внешние концы барьеров 38 потока в целом выровнены с малыми стержнями 32а. Как малые стержни 32а, так и большие стержни 32b слегка углублены в слоистый материал 36.
[0057] На ФИГ. 11А показаны линии 42а магнитного поля между обмотками 18 статора и стержнями 26а и 26b при пуске и линии 42b магнитного поля между постоянными магнитами 22 и стержнями 32а и 32b электродвигателя 10 сразу же после пуска. Линии 42а магнитного поля являются следствием проскальзывания стержней 26а и 26b относительно вращающегося магнитного поля статора. Линии 42а магнитного поля сразу же возникают при пуске, поскольку внешний HPMSC-ротор 20 является неподвижным при пуске и имеет место проскальзывание между неподвижным внешним HPMSC-ротором 20 и вращающимся магнитным полем статора. В результате проскальзывания генерируется ток в стержнях 26 за счет магнитной индукции, и под действием этого тока создается крутящий момент на внешнем HPMSC-роторе 20 для ускорения внешнего HPMSC-ротора 20.
[0058] По существу сразу же после пуска внешний HPMSC-ротор 20 начинает вращаться, возникает проскальзывание между постоянными магнитами 22 внешнего HPMSC-ротора 20 и стержнями 32а и 32b внутреннего SC-ротора 30, и создаются линии 42b магнитного поля. Важный признак электродвигателя 10 состоит в том, что линии 42b магнитного поля не возникают немедленно при пуске, поскольку такие линии магнитного поля связывают с возможностью вращения внешний HPMSC-ротор 20 с внутренним SC-ротором 30, создавая сопротивление ускорению внешнего HPMSC-ротора 20. Такое сопротивление способно препятствовать преодолению внешним HPMSC-ротором 20 тормозного и пульсационного моментов, создаваемых постоянными магнитами в известных LSPM-электродвигателях, и ограничивать мощность постоянных магнитов 22, ограничивая таким образом эффективность электродвигателя 10. Таким образом, электродвигатель 10 является саморегулирующимся, соединяя лишь внешний HPMSC-ротор 20 с внутренним SC-ротором 30 и валом 14 электродвигателя после преодоления внешним HPMSC-ротором 20 тормозного и пульсационного моментов.
[0059] На ФИГ. 11В показаны линии 50 магнитного поля между обмотками 18 статора и постоянными магнитами 22, дополнительно проникающие во внутренний SC-ротор 30 электродвигателя 10 при синхронной частоте вращения, При синхронной частоте вращения отсутствует проскальзывание между вращающимся магнитным полем статора и стержнями 26а, 26b, 32а и 32b и, следовательно, отсутствует электрическое взаимодействие между вращающимся магнитным полем статора и стержнями 26а, 26b, 32а и 32b. Вращающееся магнитное поле статора теперь полностью взаимодействует с постоянными магнитами 22 и направляется через внутренний SC-ротор посредством барьеров 38 потока.
[0060] На ФИГ. 12А показаны линии магнитного поля в двухполюсном варианте осуществления электродвигателя 10, без статора 16, на ФИГ. 12В показаны линии магнитного поля в четырехполюсном варианте осуществления электродвигателя 10, без статора 16, на ФИГ. 12С показаны линии магнитного поля в шестиполюсном варианте осуществления электродвигателя 10, без статора 16, и на ФИГ. 12D показаны линии магнитного поля в восьмиполюсном варианте осуществления электродвигателя 10, без статора 16.
[0061] На ФИГ. 13 показан способ согласно настоящему изобретению. Способ включает: этап 100, на котором подают электрический ток на статор; этап 102, на котором создают вращающееся магнитное поле статора; этап 104, на котором обеспечивают индуктивное взаимодействие вращающегося магнитного поля статора с беличьей клеткой внешнего HPMSC-ротора; этап 106, на котором с помощью вращающегося магнитного поля статора ускоряют внешний HPMSC-ротор; этап 108, на котором с помощью постоянных магнитов внешнего HPMSC-ротора создают вращающееся магнитное поле постоянных магнитов; этап 110, на котором комбинируют магнитное поле постоянных магнитов с вращающимся магнитным полем статора для создания соединительного вращающегося магнитного поля; этап 112, на котором обеспечивают индуктивное взаимодействие соединительного вращающегося магнитного поля с беличьей клеткой внутреннего SC-ротора; этап 114, на котором с помощью соединительного вращающегося магнитного поля ускоряют внутренний SC-ротор; этап 116, на котором приближают частоту вращения внутреннего SC-ротора к синхронной частоте вращения; и этап 118, на котором обеспечивают магнитную связь внешнего HPMSC-ротора и внутреннего SC-ротора при синхронной частоте вращения. Важным признаком способа является то, что внешний HPMSC-ротор не связан с внутренним SC-ротором до тех пор, пока не начинает вращаться внешний HPMSC-ротор, и таким образом обеспечивается возможность преодоления тормозного и пульсационного моментов, которые ограничивают мощность постоянных магнитов в LSPM-устройствах.
[0062] Описан гибридный электродвигатель, имеющий внешний HPMSC-ротор и внутренний SC-ротор. Внешний HPMSC-ротор содержит первые электропроводные стержни беличьей клетки, встроенные в сердечник первого ротора, и несколько постоянных магнитов на внутренней поверхности сердечника второго ротора, причем внешний HPMSC-ротор расположен между статором и внутренним SC-ротором соосно с валом электродвигателя и ни в каком режиме работы механически не связан для вращения с валом электродвигателя. Внутренний SC-ротор закреплен на валу электродвигателя соосно с валом электродвигателя и имеет сердечник второго ротора, вторые электропроводные стержни беличьей клетки, встроенные в сердечник второго ротора, и барьеры потока, направляющие вращающееся магнитное поле статора через внутренний SC-ротор при синхронной частоте вращения. Специалистам в данной области техники будут понятны и другие варианты осуществления с другими количествами магнитов, стержней и барьеров потока, не описанные в данном документе, однако основанные на принципах, раскрытых в данном документе, и эти варианты осуществления предназначены для включения в рамки объема настоящего изобретения.
[0063] На ФИГ. 14 показаны графики зависимости частоты вращения магнитного поля статора, магнитного поля внешнего HPMSC-ротора и магнитного поля внутреннего SC-ротора от времени.
[0064] На ФИГ. 15 показано поперечное сечение второго гибридного асинхронного электродвигателя 10' согласно настоящему изобретению, содержащего внешний НРМН-ротор 20'. Индуктивный пусковой элемент представляет собой кольцо 60 вихревых токов (или гистерезиса) (см. ФИГ. 16), которое используется вместо стержней 26а и 26b беличьей клетки внешнего HPMSC-ротора 20 (см. ФИГ. 6) для создания начального пускового момента. Большие стержни 32b внутреннего SC-ротора не нужны и не показаны в гибридном асинхронном электродвигателе 10'. В остальном гибридный асинхронный двигатель 10'сходен с гибридным асинхронным электродвигателем 10.
[0065] На ФИГ. 16А показан вид сбоку поперечного сечения гибридного асинхронного электродвигателя 10', содержащего внешний НРМН-ротор, и на ФИГ. 16В показан покомпонентный вид сбоку поперечного сечения гибридного асинхронного электродвигателя 10', содержащего внешний НРМН-ротор.
[0066] На ФИГ. 17 показан вид сбоку поперечного сечения кольца 60 вихревых токов внешнего НРМН-ротора согласно настоящему изобретению. После достижения внешним НРМН-ротором 20' синхронной частоты вращения, кольцо 60 вихревых токов не оказывает влияния на работу электродвигателя. Кольцо 60 вихревых токов может представлять собой любой электропроводный материал, являющийся потенциальным материалом для пускового элемента и обычно представляющий собой твердый хром или кобальтовую сталь, но оно может представлять собой любой неферроманитный материал. Предпочтительно, материал для кольца внешнего НРМН-ротора согласно настоящему изобретению представляет собой медь, которая эффективна вследствие своей высокой удельной электропроводности. Серебро показывает несколько более высокие рабочие характеристики, чем медь, вследствие своей высокой удельной электропроводности, а алюминий показывает более низкие рабочие характеристики, чем медь, вследствие своей более низкой удельной электропроводности. Новые нанотехнологии и новые виды материалов с высокой проводимостью потенциально способны обеспечить более высокие рабочие характеристики, чем медь.
[0067] На ФИГ. 18 показан вид сбоку поперечного сечения второго внутреннего SC-ротора 30'. Во внутреннем SC-роторе 30' не показаны большие стержни 32b беличьей клетки, которые могут присутствовать, но не являются необходимыми. В остальном внутренний SC-ротор 30' сходен с внутренним SC-ротором 30.
Промышленная применимость
[0068] Настоящее изобретение находит промышленное применение в области электродвигателей.
Объем изобретения
[0069] Хотя изобретение, раскрытое в настоящем описании, было описано в отношении конкретных вариантов осуществления и вариантов их применения, возможны его различные модификации и вариации со стороны специалистов в данной области техники без выхода за рамки объема настоящего изобретения, определенного в формуле изобретения.
Claims (75)
1. Гибридный электродвигатель на основе беличьей клетки и постоянных магнитов, содержащий:
кожух электродвигателя;
статор, закрепленный на кожухе электродвигателя и создающий вращающееся магнитное поле статора;
вал электродвигателя, соединенный с возможностью вращения с кожухом электродвигателя и выступающий от по меньшей мере одного конца кожуха электродвигателя для прикрепления к нагрузке;
второй ротор, закрепленный с возможностью вращения на валу электродвигателя соосно с валом электродвигателя и содержащий:
сердечник второго ротора и
расположенные через угловые промежутки вторые электропроводные стержни второй беличьей клетки, встроенные в сердечник второго ротора;
первый ротор, расположенный между статором и вторым ротором соосно с валом электродвигателя, не связанный механически с возможностью вращения с валом электродвигателя для вращения вместе с валом электродвигателя и содержащий:
сердечник первого ротора;
индуктивные элементы, выполненные с возможностью взаимодействия с вращающимся магнитным полем статора для создания крутящего момента при пуске; и
постоянные магниты, расположенные на удалении в радиальном направлении от индуктивных элементов в направлении второго ротора и перекрывающиеся под углом с индуктивными элементами,
причем первый ротор и второй ротор выполнены с возможностью магнитной связи во время синхронной работы.
2. Электродвигатель по п. 1, также содержащий барьеры потока, расположенные внутри сердечника второго ротора и направляющие вращающееся магнитное поле статора через сердечник второго ротора во время синхронной работы, причем барьеры потока представляют собой пустоты в сердечнике второго ротора.
3. Электродвигатель по п. 2, в котором барьеры потока представляют собой вогнутые каналы, соединяющие внутренние концы вторых электропроводных стержней беличьей клетки.
4. Электродвигатель по п. 1, в котором индуктивные элементы включают множество электропроводных расположенных через угловые промежутки первых стержней беличьей клетки, встроенных в поверхность сердечника первого ротора, обращенную к статору.
5. Электродвигатель по п. 4, в котором:
первые стержни беличьей клетки включают множество расположенных через угловые промежутки первых малых стержней беличьей клетки, разделенных на N первых групп, каждая из которых содержит последовательно расположенные первые малые стержни беличьей клетки; и
первые группы разделены в угловом направлении посредством N расположенных через угловые промежутки и имеющих больший размер первых больших стержней беличьей клетки, каждый из которых разделяет смежные группы из указанных первых групп.
6. Электродвигатель по п. 5, в котором вторые электропроводные стержни беличьей клетки встроены через угловые промежутки во вторую внешнюю поверхность сердечника второго ротора.
7. Электродвигатель по п. 2, в котором индуктивные элементы включают кольцо вихревых токов на первом роторе, обращенном к статору.
8. Электродвигатель по п. 1, в котором:
первый ротор содержит N постоянных магнитов;
вторые электропроводные стержни беличьей клетки расположены вблизи поверхности сердечника второго ротора, обращенной к первому ротору, и включают N расположенных через угловые промежутки групп стержней;
каждая из N групп стержней включает стержни правой половины, расположенные в правой половине, и стержни левой половины, расположенные в левой половине, и
расположенные через промежутки барьеры потока достигают внутренней области сердечника второго ротора и проходят от первых внутренних концов по меньшей мере одного из стержней левой половины каждой из N групп стержней и до вторых внутренних концов по меньшей мере одного из стержней правой половины каждой из N групп стержней.
9. Электродвигатель по п. 8, в котором барьеры потока, соединяющие стержни левой половины со стержнями правой половины, являются симметричными в боковом направлении.
10. Электродвигатель по п. 8, в котором барьеры потока, соединяющие самый левый из стержней левой половины с самым правым из стержней правой половины, проходят глубже внутрь сердечника второго ротора, чем те из барьеров потока, соединяющих стержни левой половины и стержни правой половины, которые расположены ближе к центру каждой из N групп стержней.
11. Электродвигатель по п. 1, в котором:
статор расположен снаружи от обоих из первого ротора и второго ротора;
второй ротор представляет собой внутренний ротор; а
первый ротор представляет собой внешний ротор, расположенный между внутренним ротором и статором.
12. Электродвигатель по п. 11, в котором при синхронной скорости:
первые стержни беличьей клетки выровнены в угловом направлении со вторыми стержнями беличьей клетки и
третьи линии магнитного поля проходят от статора, по отдельности между последовательно расположенными стержнями из первых стержней беличьей клетки, через постоянные магниты и между вторыми стержнями беличьей клетки.
13. Электродвигатель по п. 1, в котором:
постоянные магниты включают N расположенных через угловые промежутки постоянных магнитов;
индуктивные элементы включают:
N первых групп электропроводных первых малых стержней беличьей клетки, встроенных в сердечник первого ротора, причем каждая из указанных N первых групп выровнена в угловом направлении с одним из N постоянных магнитов; и
N электропроводных первых больших стержней беличьей клетки, встроенных в сердечник первого ротора, причем каждый из первых больших стержней беличьей клетки имеет большую площадь поперечного сечения, чем каждый из первых малых стержней беличьей клетки, и первые большие стержни беличьей клетки выровнены в угловом направлении с зазорами между последовательно расположенными магнитами из числа указанных N постоянных магнитов; и
каждый из N первых больших стержней беличьей клетки разделяет в угловом направлении последовательно расположенные группы из числа указанных N первых групп.
14. Электродвигатель по п. 13, в котором:
вторые стержни беличьей клетки включают:
N групп вторых малых стержней беличьей клетки; и
N вторых больших стержней беличьей клетки; и
во время синхронной работы вторые малые стержни беличьей клетки по отдельности выровнены с первыми малыми стержнями беличьей клетки и вторые большие стержни беличьей клетки по отдельности выровнены с первыми большими стержнями беличьей клетки.
15. Электродвигатель по п. 1, в котором:
индуктивные элементы включают первые стержни беличьей клетки и
во время синхронной работы один отдельный стержень из числа вторых стержней беличьей клетки выровнен с одним отдельным стержнем из числа первых стержней беличьей клетки, которые выровнены в угловом направлении с постоянными магнитами.
16. Электродвигатель по п. 5, в котором
постоянные магниты включают N расположенных через угловые промежутки постоянных магнитов и
каждая из N групп малых стержней беличьей клетки расположена поверх одного из N постоянных магнитов.
17. Гибридный электродвигатель на основе беличьей клетки и постоянных магнитов, содержащий:
кожух электродвигателя;
статор, закрепленный на кожухе электродвигателя и создающий вращающееся магнитное поле статора;
вал электродвигателя, соединенный с возможностью вращения с кожухом электродвигателя и проходящий от по меньшей мере одного конца кожуха электродвигателя для прикрепления к нагрузке;
второй ротор, закрепленный с возможностью вращения на валу электродвигателя соосно с валом электродвигателя, являющийся внутренним ротором и содержащий:
сердечник второго ротора и расположенные через угловые промежутки электропроводные вторые стержни беличьей клетки, встроенные в сердечник второго ротора;
первый ротор, расположенный между статором и вторым ротором соосно с валом электродвигателя, не связанный механически с возможностью вращения с валом электродвигателя для вращения вместе с валом электродвигателя и содержащий:
сердечник первого ротора и
расположенные через угловые промежутки электропроводные первые стержни беличьей клетки, встроенные в сердечник первого ротора и выполненные с возможностью взаимодействия с вращающимся магнитным полем статора для создания крутящего момента при пуске, причем первые стержни беличьей клетки выполнены с возможностью одновременного выравнивания в угловом направлении со вторыми стержнями беличьей клетки во время синхронной работы; и
постоянные магниты, расположенные в сердечнике первого ротора, смещенные в радиальном направлении от индуктивных элементов в направлении второго ротора и перекрывающиеся в угловом направлении с первыми стержнями беличьей клетки.
18. Электродвигатель по. 17, в котором все первые стержни беличьей клетки перекрываются в угловом направлении с постоянными магнитами и выровнены в угловом направлении со вторыми стержнями беличьей клетки во время синхронной работы.
19. Гибридный электродвигатель на основе беличьей клетки и постоянных магнитов, содержащий:
кожух электродвигателя;
статор, закрепленный на кожухе электродвигателя и создающий вращающееся магнитное поле статора;
вал электродвигателя, соединенный с возможностью вращения с кожухом электродвигателя и проходящий от по меньшей мере одного конца кожуха электродвигателя для прикрепления к нагрузке;
второй ротор, закрепленный с возможностью вращения на валу электродвигателя соосно с валом электродвигателя, являющийся внутренним ротором и содержащий:
сердечник второго ротора и
расположенные через угловые промежутки электропроводные вторые стержни беличьей клетки, встроенные в сердечник второго ротора;
первый ротор, расположенный между статором и вторым ротором соосно с валом электродвигателя, не связанный механически с возможностью вращения с валом электродвигателя для вращения вместе с валом электродвигателя и содержащий:
сердечник первого ротора;
расположенные через угловые промежутки электропроводные первые стержни беличьей клетки, встроенные в сердечник первого ротора и выполненные с возможностью взаимодействия с вращающимся магнитным полем статора для создания крутящего момента при пуске;
постоянные магниты, расположенные под первыми стержнями беличьей клетки на поверхности сердечника первого ротора, обращенной к второму ротору; и
все следующие друг за другом линии поля статора разделены посредством первых стержней беличьей клетки и вторых стержней беличьей клетки во время синхронной работы.
20. Электродвигатель по. 19, в котором линии поля статора направлены через постоянные магниты посредством первых стержней беличьей клетки и вторых стержней беличьей клетки во время синхронной работы.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/438,023 US10998802B2 (en) | 2017-02-21 | 2017-02-21 | Hybrid induction motor with self aligning hybrid induction/permanent magnet rotor |
| US15/438,023 | 2017-02-21 | ||
| PCT/US2018/018956 WO2018156582A1 (en) | 2017-02-21 | 2018-02-21 | Hybrid induction motor with self aligning hybrid induction/permanent magnet rotor |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| RU2019129732A RU2019129732A (ru) | 2021-03-24 |
| RU2019129732A3 RU2019129732A3 (ru) | 2021-07-06 |
| RU2755208C2 true RU2755208C2 (ru) | 2021-09-14 |
Family
ID=62490424
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2019129732A RU2755208C2 (ru) | 2017-02-21 | 2018-02-21 | Гибридный асинхронный электродвигатель с самовыравнивающимся гибридным ротором на основе индукции и постоянных магнитов |
Country Status (14)
| Country | Link |
|---|---|
| US (1) | US10998802B2 (ru) |
| EP (1) | EP3586433A4 (ru) |
| JP (1) | JP7158397B2 (ru) |
| KR (1) | KR102630362B1 (ru) |
| CN (1) | CN108462349B (ru) |
| AR (1) | AR111384A1 (ru) |
| AU (1) | AU2018225543A1 (ru) |
| BR (1) | BR112019017362B1 (ru) |
| CA (1) | CA3053913A1 (ru) |
| HK (1) | HK1258540A1 (ru) |
| MX (1) | MX2019009933A (ru) |
| RU (1) | RU2755208C2 (ru) |
| TW (1) | TWI785008B (ru) |
| WO (1) | WO2018156582A1 (ru) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190068044A1 (en) * | 2010-01-25 | 2019-02-28 | Svetozar B. Petrovich | In Evolution of Gravity Fields |
| US10998802B2 (en) * | 2017-02-21 | 2021-05-04 | Louis J. Finkle | Hybrid induction motor with self aligning hybrid induction/permanent magnet rotor |
| JP6709712B2 (ja) * | 2016-10-07 | 2020-06-17 | 東芝産業機器システム株式会社 | 同期リラクタンス型回転電機 |
| PT3588753T (pt) * | 2018-06-29 | 2021-05-14 | Abb Schweiz Ag | Máquina de indução elétrica |
| CN110492710B (zh) * | 2019-09-20 | 2021-02-26 | 齐鲁工业大学 | 一种双转子发电机及其控制方法 |
| KR102509568B1 (ko) * | 2020-11-26 | 2023-03-10 | 한양대학교 산학협력단 | 출력 특성을 고려하여 q축 슬롯 구조를 개선한 라인 기동식 동기형 릴럭턴스 전동기의 회전자 |
| KR102547221B1 (ko) * | 2021-07-08 | 2023-06-23 | 에스제이글로벌 주식회사 | 직입 구동방식의 영구자석 매입형 자기저항 동기모터의 회전자 및 그의 제조방법 |
| CN113691093B (zh) * | 2021-07-30 | 2022-12-09 | 齐鲁工业大学 | 一种外转子永磁感应电动机及工作方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1631672A1 (ru) * | 1987-08-24 | 1991-02-28 | Томский политехнический институт им.С.М.Кирова | Синхронный электродвигатель с посто нными магнитами |
| RU2153755C2 (ru) * | 1997-08-12 | 2000-07-27 | Общество с ограниченной ответственностью "Веста-Электрон" | Синхронно-асинхронный электродвигатель с короткозамкнутой обмоткой ротора |
| US20050077801A1 (en) * | 2003-10-14 | 2005-04-14 | Seung-Do Han | Line start reluctance synchronous motor |
| US20060108888A1 (en) * | 2002-12-12 | 2006-05-25 | Lg Electronics Inc. | Rotor for line-start reluctance motor |
| WO2011145509A1 (ja) * | 2010-05-17 | 2011-11-24 | 日立金属株式会社 | カップリング装置 |
| WO2015106002A1 (en) * | 2014-01-09 | 2015-07-16 | Louis Finkle | Hybrid electric motor with self aligning permanent magnet and squirrel cage rotors |
Family Cites Families (79)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB495813A (en) | 1936-05-27 | 1938-11-21 | Jakob Bohli | Magneto electric machines |
| US2209558A (en) | 1937-04-22 | 1940-07-30 | Karl Otto Goettsch | Magnetic clamping appliance |
| US2243616A (en) | 1937-12-08 | 1941-05-27 | Bing Julius | Lifting magnet |
| US2287286A (en) | 1938-08-13 | 1942-06-23 | Karl Otto Goettsch | Magnetic chuck |
| US2558540A (en) | 1948-03-23 | 1951-06-26 | Bell Telephone Labor Inc | Electromagnetic motor |
| US2864017A (en) * | 1955-11-28 | 1958-12-09 | Waltscheff Dimo Dimitroff | Inducto-motive power apparatus with a plurality of rotors |
| US3445699A (en) | 1965-08-31 | 1969-05-20 | Reuland Electric Co | Multirotor induction motor |
| US3459981A (en) | 1966-06-01 | 1969-08-05 | Mallory & Co Inc P R | Shaded pole synchronous motor |
| US3758800A (en) * | 1972-01-24 | 1973-09-11 | Gen Electric | Reluctance synchronous motors and rotors for same |
| JPS572692B2 (ru) | 1972-02-23 | 1982-01-18 | ||
| US4151431A (en) | 1973-12-06 | 1979-04-24 | Johnson Howard R | Permanent magnet motor |
| JPS5147208A (ja) | 1974-10-21 | 1976-04-22 | Nippon Telegraph & Telephone | Parusumootateishijino shindokyushusochi |
| IT1108126B (it) | 1977-11-30 | 1985-12-02 | Fischer Ag Georg | Lega per getti di acciaio austenitica non magentizzabile |
| YU41934B (en) | 1979-08-03 | 1988-02-29 | Baermann Max | Switehing-in permanent - magnetbrake |
| US4508998A (en) | 1981-02-09 | 1985-04-02 | David H. Rush | Brushless disc-type DC motor or generator |
| US4578609A (en) | 1982-09-29 | 1986-03-25 | The Garrett Corporation | Permanent magnet dynamoelectric machine |
| JPS62117558A (ja) | 1985-11-18 | 1987-05-29 | 東邦機工株式会社 | 階段の昇降自在な車椅子装置 |
| WO1988005976A1 (en) | 1987-02-04 | 1988-08-11 | Franklin's Magnetic Generator Corp. | Dynamomagnetic machine |
| US4829205A (en) | 1987-12-04 | 1989-05-09 | Lindgren Theodore D | Dual-rotary induction motor with stationary field winding |
| US5508576A (en) | 1990-07-12 | 1996-04-16 | Seiko Epson Corporation | Rotor for brushless electromotor |
| FR2675299B1 (fr) | 1991-04-10 | 1994-09-16 | Braillon Cie | Porteur magnetique a aimants permanents. |
| JPH04331445A (ja) | 1991-05-01 | 1992-11-19 | Honda Motor Co Ltd | 誘導モータ |
| JP3033621B2 (ja) | 1991-08-28 | 2000-04-17 | 株式会社佐竹製作所 | ブラシレス誘導同期電動機 |
| JP2968918B2 (ja) | 1993-09-16 | 1999-11-02 | 弘平 湊 | 磁力回転装置 |
| JPH07203644A (ja) | 1993-12-29 | 1995-08-04 | Tokai Rubber Ind Ltd | 回動装置 |
| DE4421594A1 (de) | 1994-06-21 | 1996-01-04 | Bernhard Kraser | Vorrichtung zur Veränderung der magnetischen Luftspaltinduktion in elektromechanischen Energiewandlern, bei denen der magnetische Widerstand des magnetischen Schließungskreises in der Maschine variabel ist |
| JP3269346B2 (ja) | 1995-08-24 | 2002-03-25 | トヨタ自動車株式会社 | 永久磁石モータ |
| US5861700A (en) * | 1996-04-30 | 1999-01-19 | Samsung Electronics Co., Ltd. | Rotor for an induction motor |
| JPH11146645A (ja) | 1997-11-07 | 1999-05-28 | Toshiba Tec Corp | 電源装置 |
| JPH11146615A (ja) | 1997-11-11 | 1999-05-28 | Matsushita Electric Ind Co Ltd | リラクタンスモータ |
| US5886443A (en) | 1997-12-03 | 1999-03-23 | General Electric Canada Inc. | Spark suppression of induction type rotors of dynamoelectric machines |
| JPH11178298A (ja) | 1997-12-15 | 1999-07-02 | Toshiba Corp | 永久磁石形モータの固定子鉄心及び永久磁石形モータ |
| JPH11341757A (ja) | 1998-05-21 | 1999-12-10 | Toyota Motor Corp | 電動機および動力伝達装置並びにハイブリッド車両 |
| CN101917106B (zh) | 1999-07-16 | 2012-04-04 | 松下电器产业株式会社 | 永久磁铁同步电动机 |
| US6376959B1 (en) | 1999-10-21 | 2002-04-23 | The United States Of America As Represented By The Secretary Of The Army | Mangle magnetic structure |
| JP3879412B2 (ja) | 2001-02-28 | 2007-02-14 | 株式会社日立製作所 | 発電システム |
| JP2002272067A (ja) | 2001-03-15 | 2002-09-20 | Techno Takatsuki Co Ltd | 籠形回転子および該籠形回転子を用いる電動機 |
| JP3695344B2 (ja) | 2001-04-16 | 2005-09-14 | 日産自動車株式会社 | 回転電機 |
| JP4619585B2 (ja) | 2001-09-06 | 2011-01-26 | 株式会社東芝 | リラクタンス型回転電機 |
| US20040041481A1 (en) | 2002-08-27 | 2004-03-04 | Jin-Hu Kuo | Magnetism driven power machine |
| JP4120347B2 (ja) | 2002-10-08 | 2008-07-16 | 日産自動車株式会社 | 回転電機 |
| JP2004140978A (ja) | 2002-10-21 | 2004-05-13 | Mitsubishi Heavy Ind Ltd | かご形誘導機回転子、及び、それの製造方法 |
| WO2004088817A2 (en) | 2003-03-28 | 2004-10-14 | John Bates | Improved efficiency magnetic motor |
| US6864773B2 (en) | 2003-04-04 | 2005-03-08 | Applied Materials, Inc. | Variable field magnet apparatus |
| JP4069796B2 (ja) | 2003-05-08 | 2008-04-02 | 日産自動車株式会社 | 複軸多層モータの磁気回路制御装置 |
| GB0312486D0 (en) | 2003-05-30 | 2003-07-09 | Univ Bath | Improvements in or relating to electromotive machines |
| KR100545694B1 (ko) | 2003-07-23 | 2006-01-24 | 가부시키가이샤 야스기 세이사쿠쇼 | 인쇄 원판용 펀칭 장치 |
| US7088011B2 (en) | 2003-11-21 | 2006-08-08 | Smith Raymond W | Motor-generator system with a current control feedback loop |
| JP2005210826A (ja) | 2004-01-22 | 2005-08-04 | Fujitsu General Ltd | 電動機 |
| JP3996919B2 (ja) | 2004-08-20 | 2007-10-24 | 信越化学工業株式会社 | 永久磁石モータ |
| KR100631551B1 (ko) * | 2004-12-21 | 2006-10-09 | 엘지전자 주식회사 | 이중자석 하이브리드 유도 전동기 |
| KR100619769B1 (ko) * | 2005-02-04 | 2006-09-11 | 엘지전자 주식회사 | 역회전 방지기능을 구비한 하이브리드 타입 인덕션모터 |
| JP2006288183A (ja) | 2005-03-09 | 2006-10-19 | Nissan Motor Co Ltd | 電動機 |
| JP4434045B2 (ja) | 2005-03-14 | 2010-03-17 | 株式会社日立製作所 | 回転電機及び風力発電システム |
| KR100652596B1 (ko) * | 2005-04-11 | 2006-12-01 | 엘지전자 주식회사 | 이중자석 하이브리드 유도 전동기 |
| JP4969064B2 (ja) | 2005-06-14 | 2012-07-04 | 日立アプライアンス株式会社 | 電動機の回転子及び電動機 |
| KR100690700B1 (ko) * | 2006-01-23 | 2007-03-12 | 엘지전자 주식회사 | 가변속 단상 유도전동기 |
| JP4882715B2 (ja) | 2006-12-11 | 2012-02-22 | ダイキン工業株式会社 | 電動機及びその制御方法 |
| DE102006060986A1 (de) | 2006-12-20 | 2008-06-26 | Robert Bosch Gmbh | Magnetische Drehmomentbegrenzung |
| JP5157182B2 (ja) | 2007-01-30 | 2013-03-06 | 日産自動車株式会社 | リラクタンスモータ用ロータ及びそれを備えるリラクタンスモータ |
| US7923881B2 (en) | 2007-05-04 | 2011-04-12 | A.O. Smith Corporation | Interior permanent magnet motor and rotor |
| US7851962B1 (en) | 2007-06-14 | 2010-12-14 | Williams Kevin R | Induction motor utilizing dual stators and a double squirrel cage motor |
| GB0810096D0 (en) | 2008-06-03 | 2008-07-09 | Magnomatics Ltd | Electrical machines |
| WO2009155467A2 (en) | 2008-06-18 | 2009-12-23 | Duffey Christopher K | Variable speed synchronous generator |
| GB0817046D0 (en) | 2008-09-18 | 2008-10-22 | Rolls Royce Plc | Magnectic Gear Arrangement |
| JP2011061933A (ja) | 2009-09-08 | 2011-03-24 | Toshiba Corp | 永久磁石式回転電機 |
| US8156697B2 (en) | 2009-10-15 | 2012-04-17 | Sunlink Corporation | Photovoltaic module mounting system |
| US8097993B2 (en) | 2009-10-30 | 2012-01-17 | Finkle Louis J | Electric motor and/or generator with mechanically tuneable permanent magnetic field |
| US8072108B2 (en) | 2009-10-30 | 2011-12-06 | Finkle Louis J | Electric motor or generator with mechanically tuneable permanent magnetic field |
| US8288908B2 (en) | 2009-10-30 | 2012-10-16 | Finkle Louis J | Reconfigurable inductive to synchronous motor |
| US8390162B2 (en) | 2009-10-30 | 2013-03-05 | Louis J. Finkle | Reconfigurable inductive to synchronous motor |
| CN102868268A (zh) | 2011-07-03 | 2013-01-09 | 余虹锦 | 新型双鼠笼结构的气隙磁场电磁调制式永磁电机 |
| KR101310529B1 (ko) | 2011-09-01 | 2013-09-23 | 삼성전기주식회사 | 스위치드 릴럭턴스 모터 |
| JP5702692B2 (ja) | 2011-09-13 | 2015-04-15 | 日本信号株式会社 | 転てつ機 |
| JP5712882B2 (ja) * | 2011-09-28 | 2015-05-07 | 株式会社豊田自動織機 | 電動圧縮機用の電動モータ |
| DE102013102184A1 (de) | 2012-03-09 | 2013-09-12 | Denso Corporation | Magnetmodulationsmotor und elektrische Transmission |
| US9484794B2 (en) * | 2012-04-20 | 2016-11-01 | Louis J. Finkle | Hybrid induction motor with self aligning permanent magnet inner rotor |
| US9923439B2 (en) * | 2014-01-09 | 2018-03-20 | Motor Generator Technology, Inc. | Hybrid electric motor with self aligning permanent magnet and squirrel cage rotors |
| US10998802B2 (en) * | 2017-02-21 | 2021-05-04 | Louis J. Finkle | Hybrid induction motor with self aligning hybrid induction/permanent magnet rotor |
-
2017
- 2017-02-21 US US15/438,023 patent/US10998802B2/en active Active
-
2018
- 2018-02-13 CN CN201810150855.0A patent/CN108462349B/zh active Active
- 2018-02-14 AR ARP180100340A patent/AR111384A1/es active IP Right Grant
- 2018-02-14 TW TW107105446A patent/TWI785008B/zh active
- 2018-02-21 RU RU2019129732A patent/RU2755208C2/ru active
- 2018-02-21 BR BR112019017362-5A patent/BR112019017362B1/pt active IP Right Grant
- 2018-02-21 AU AU2018225543A patent/AU2018225543A1/en not_active Abandoned
- 2018-02-21 WO PCT/US2018/018956 patent/WO2018156582A1/en unknown
- 2018-02-21 JP JP2019544851A patent/JP7158397B2/ja active Active
- 2018-02-21 EP EP18756698.9A patent/EP3586433A4/en active Pending
- 2018-02-21 MX MX2019009933A patent/MX2019009933A/es unknown
- 2018-02-21 CA CA3053913A patent/CA3053913A1/en active Pending
- 2018-02-21 KR KR1020197027190A patent/KR102630362B1/ko active IP Right Grant
-
2019
- 2019-01-18 HK HK19100895.5A patent/HK1258540A1/zh unknown
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1631672A1 (ru) * | 1987-08-24 | 1991-02-28 | Томский политехнический институт им.С.М.Кирова | Синхронный электродвигатель с посто нными магнитами |
| RU2153755C2 (ru) * | 1997-08-12 | 2000-07-27 | Общество с ограниченной ответственностью "Веста-Электрон" | Синхронно-асинхронный электродвигатель с короткозамкнутой обмоткой ротора |
| US20060108888A1 (en) * | 2002-12-12 | 2006-05-25 | Lg Electronics Inc. | Rotor for line-start reluctance motor |
| US20050077801A1 (en) * | 2003-10-14 | 2005-04-14 | Seung-Do Han | Line start reluctance synchronous motor |
| WO2011145509A1 (ja) * | 2010-05-17 | 2011-11-24 | 日立金属株式会社 | カップリング装置 |
| WO2015106002A1 (en) * | 2014-01-09 | 2015-07-16 | Louis Finkle | Hybrid electric motor with self aligning permanent magnet and squirrel cage rotors |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2019129732A3 (ru) | 2021-07-06 |
| TWI785008B (zh) | 2022-12-01 |
| CN108462349A (zh) | 2018-08-28 |
| EP3586433A4 (en) | 2020-12-09 |
| CA3053913A1 (en) | 2018-08-30 |
| BR112019017362B1 (pt) | 2023-11-21 |
| JP7158397B2 (ja) | 2022-10-21 |
| JP2020508631A (ja) | 2020-03-19 |
| AR111384A1 (es) | 2019-07-10 |
| RU2019129732A (ru) | 2021-03-24 |
| CN108462349B (zh) | 2021-08-27 |
| BR112019017362A2 (pt) | 2020-03-31 |
| HK1258540A1 (zh) | 2019-11-15 |
| EP3586433A1 (en) | 2020-01-01 |
| US10998802B2 (en) | 2021-05-04 |
| US20180166959A1 (en) | 2018-06-14 |
| TW201832453A (zh) | 2018-09-01 |
| KR20190115086A (ko) | 2019-10-10 |
| WO2018156582A1 (en) | 2018-08-30 |
| KR102630362B1 (ko) | 2024-01-26 |
| AU2018225543A1 (en) | 2019-09-05 |
| MX2019009933A (es) | 2020-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2755208C2 (ru) | Гибридный асинхронный электродвигатель с самовыравнивающимся гибридным ротором на основе индукции и постоянных магнитов | |
| US10749390B2 (en) | Line-start synchronous reluctance motor with improved performance | |
| US8664823B2 (en) | Magnetic barrier for minimizing demagnetization in bi-permanent magnet synchronous machines | |
| US9479017B2 (en) | Deep V-magnet cavity structure rotor | |
| US8664822B2 (en) | Bi-permanent magnets in synchronous machines | |
| US10476363B2 (en) | Hybrid electric motor with self aligning permanent magnet and squirrel cage dual rotors magnetically coupled with permeant magnets and bars at synchronous speed | |
| WO2011122996A1 (en) | Rotor of an electric machine with embedded permanent magnets and electric machine | |
| EP3092704B1 (en) | Hybrid electric motor with self aligning permanent magnet and squirrel cage rotors | |
| US20130207500A1 (en) | Three-phase alternating current permanent magnet motor | |
| JP2000197325A (ja) | リラクタンスモ―タ | |
| US9923439B2 (en) | Hybrid electric motor with self aligning permanent magnet and squirrel cage rotors | |
| US20200044494A1 (en) | High-magnetic-flux discrete stator electrical machine | |
| KR100912637B1 (ko) | 회전기기 및 전자기 머신 | |
| CN109038871B (zh) | 一种分段转子开关磁阻电机 | |
| US20210257893A1 (en) | Hybrid Induction Eddy Current Ring Motor with Self Aligning Hybrid Induction/Permanent Magnet Rotor | |
| WO2023118983A1 (en) | Reduction of cogging torque in two-stator permanent magnet generators with an intermediate rotor radial flux. | |
| MXPA06001246A (es) | Maquina giratoria y maquina electromagnetica |