RU2644540C2 - Трехмерное ультразвуковое наведение множества инвазивных устройств - Google Patents
Трехмерное ультразвуковое наведение множества инвазивных устройств Download PDFInfo
- Publication number
- RU2644540C2 RU2644540C2 RU2015102538A RU2015102538A RU2644540C2 RU 2644540 C2 RU2644540 C2 RU 2644540C2 RU 2015102538 A RU2015102538 A RU 2015102538A RU 2015102538 A RU2015102538 A RU 2015102538A RU 2644540 C2 RU2644540 C2 RU 2644540C2
- Authority
- RU
- Russia
- Prior art keywords
- needle
- ultrasound
- probe
- plane
- imaging system
- Prior art date
Links
- 230000008685 targeting Effects 0.000 title 1
- 239000000523 sample Substances 0.000 claims abstract description 80
- 238000003780 insertion Methods 0.000 claims abstract description 48
- 230000037431 insertion Effects 0.000 claims abstract description 48
- 238000002604 ultrasonography Methods 0.000 claims abstract description 43
- 238000012285 ultrasound imaging Methods 0.000 claims abstract description 20
- 238000003384 imaging method Methods 0.000 claims abstract description 16
- 238000012800 visualization Methods 0.000 claims description 11
- 238000001574 biopsy Methods 0.000 claims description 6
- 238000002347 injection Methods 0.000 claims description 6
- 239000007924 injection Substances 0.000 claims description 6
- 239000003086 colorant Substances 0.000 claims description 4
- 230000003287 optical effect Effects 0.000 claims description 4
- 230000000007 visual effect Effects 0.000 claims description 4
- 238000007674 radiofrequency ablation Methods 0.000 claims description 2
- 239000011159 matrix material Substances 0.000 abstract description 4
- 239000003814 drug Substances 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 210000003484 anatomy Anatomy 0.000 description 16
- 238000000034 method Methods 0.000 description 14
- 230000000875 corresponding effect Effects 0.000 description 5
- 238000002592 echocardiography Methods 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 238000002679 ablation Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 238000013480 data collection Methods 0.000 description 2
- LPXQRXLUHJKZIE-UHFFFAOYSA-N 8-azaguanine Chemical group NC1=NC(O)=C2NN=NC2=N1 LPXQRXLUHJKZIE-UHFFFAOYSA-N 0.000 description 1
- 241000219470 Mirabilis Species 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000013188 needle biopsy Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000010186 staining Methods 0.000 description 1
- 230000009885 systemic effect Effects 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/04—Endoscopic instruments, e.g. catheter-type instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
- A61B8/145—Echo-tomography characterised by scanning multiple planes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/463—Displaying means of special interest characterised by displaying multiple images or images and diagnostic data on one display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1477—Needle-like probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/04—Endoscopic instruments, e.g. catheter-type instruments
- A61B2010/045—Needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
- A61B2034/2053—Tracking an applied voltage gradient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0833—Clinical applications involving detecting or locating foreign bodies or organic structures
- A61B8/0841—Clinical applications involving detecting or locating foreign bodies or organic structures for locating instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4416—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to combined acquisition of different diagnostic modalities, e.g. combination of ultrasound and X-ray acquisitions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/466—Displaying means of special interest adapted to display 3D data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/523—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for generating planar views from image data in a user selectable plane not corresponding to the acquisition plane
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Robotics (AREA)
- Plasma & Fusion (AREA)
- Otolaryngology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Изобретение относится к медицинской технике и применяется для визуализации игл при биопсии. Ультразвуковая система содержит: 3D ультразвуковой зонд для визуализации, включающий в себя двумерный матричный датчик; игольную направляющую, присоединяющуюся к зонду для визуализации с заранее заданной ориентацией относительно зонда для визуализации. Игольная направляющая имеет множество положений введения иглы для направления множества игл для введения внутрь области пространства за счет различных плоскостей введения иглы, так что первая плоскость введения иглы и вторая плоскость введения иглы плоскостей введения иглы ориентированы под различными углами относительно контрольной плоскости изображения, ортогональной концам двумерного матричного датчика. Ультразвуковая система соединена с зондом и выполнена с возможностью управления 3D ультразвуковым зондом для визуализации для формирования множества 2D изображений, одновременно образованных из плоскостей изображения, соответствующих различным плоскостям введения иглы. Использование изобретения позволяет обеспечить более широкую зону введения иглы. 14 з.п. ф-лы, 11 ил.
Description
Данное изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к ультразвуковым диагностическим системам визуализации, которые позволяют визуально отображать и управлять введением множества игл для биопсии в реальном времени.
Ультразвуковая визуализация в течение долгого времени использовалась для получения изображения траектории введения игл для биопсии и других инвазивных устройств таким образом, чтобы врач-клиницист мог визуально наблюдать за введением иглы в направлении заданной анатомической области, которая подлежит взятию материала на биопсию. Традиционно это осуществляется с помощью двухмерной (2D) ультразвуковой визуализации и 2D зонда для визуализации, снабженного игольной направляющей. Одна из таких игольных направляющих иллюстрируется в патенте США 6,203,499 (Imling и др.). Назначением указанной игольной направляющей является удерживание иглы согласованно с плоскостью 2D изображения ультразвукового зонда так, что введение указанной иглы происходит непрерывно в пределах данной плоскости, причем она постоянно отображается с помощью указанного ультразвукового зонда. Упомянутая игольная направляющая прикрепляется к зонду таким образом, чтобы отверстие или паз в данной направляющей, через которое вводится игла, находилось в фиксированном соответствии с плоскостью изображения зонда. Это ограничивает введение иглы двумя положениями, с одного конца зонда либо с другого. Врач-клиницист манипулирует зондом, пока заданная анатомическая область не окажется в пределах видимости в плоскости изображения. Тогда врач-клиницист вводит иглу через указанную игольную направляющую под наклоном, который будет содействовать введению кончика иглы в направлении заданной анатомической области и достижению ее. Образец материала из указанной заданной анатомической области затем может быть извлечен через просвет иглы.
Затруднение, которое зачастую встречается в случае игольной биопсии, состоит в постоянном удерживании траектории введения иглы согласованно с плоскостью изображения зонда. Существуют две причины данного затруднения. Одно заключается в том, что зонд необходимо держать неподвижно одной рукой для обеспечения фиксированного положения плоскости изображения, тогда как другой рукой манипулируют и вводят иглу. Другое затруднение представляет собой то, что игла может изгибаться и отклоняться по мере ее введения, а также что игла сталкивается с тканями различной плотности и жесткости по мере ее проникновения в ткани тела. Это может вызвать отклонение иглы от одной плоскости при ее введении. Следовательно, было бы желательно иметь более широкую зону видимости заданной анатомической области и траектории введения иглы, такую как обеспечивает трехмерная (3D) ультразвуковая визуализация. Также было бы желательно иметь возможность введения иглы из множества положений, а не только с концов зонда.
Трехмерная ультразвуковая визуализация предоставит более широкую зону видимости введения иглы. Однако многим врачам-клиницистам не нравятся помехи и часто неоднозначное восприятие глубины при 3D ультразвуковой визуализации. Они предпочитают четкое и простое для понимания двухмерное изображение. Одним из способов пойти навстречу данному пожеланию является применение 3D визуализации с многоплоскостной реконструкцией (МПР). С использованием МПР 3D зонд будет сканировать трехмерный объем впереди зонда, который включает в себя заданную анатомическую область, после чего одна плоскость в указанном объеме выбирается для реконструкции в виде 2D изображения. Это позволяет врачу-клиницисту держать 3D зонд неподвижно и регулировать расположение МПР-плоскости, чтобы приспосабливаться к изменяющейся плоскости введения иглы. К сожалению, практикуется процедура для трех рук: одна рука для того, чтобы держать зонд, еще одна - чтобы вводить иглу, и третья рука для регулирования расположения МПР-плоскости. Было бы желательно усовершенствовать данную процедуру таким образом, чтобы игла непрерывно отображалась в 3D объеме, при том, что одна рука держит зонд, а другая вводит иглу.
В соответствии с принципами настоящего изобретения, диагностическая ультразвуковая система имеет 3D зонд для визуализации с игольной направляющей, которая автоматически выравнивает плоскость отображаемого ультразвукового изображения с плоскостью введения иглы. Игольная направляющая, прикрепленная к зонду для визуализации, производит сигнал, идентифицирующий расположение плоскости введения иглы в области пространства, которая может быть сканирована указанным зондом. Ультразвуковая система создает изображение идентифицированной плоскости, предпочтительно, путем двухпроекционной визуализации, посредством которой сканируется только идентифицированная плоскость или плоскости. В одном варианте осуществления могут быть идентифицированы плоскости введения множества игл, что облегчает использование ультразвуковой системы согласно настоящему изобретению для таких процедур, как радиочастотная абляция с применением множества игл. В другом варианте осуществления могут быть идентифицированы и визуализированы плоскости введения игл с различным наклоном.
На чертежах:
Фиг. 1 иллюстрирует 3D ультразвуковой зонд, который держат за рукоятку зонда, с игольной направляющей согласно настоящему изобретению, прикрепленной к дистальному концу указанного зонда.
На Фиг. 2 изображен фронтальный вид 3D зонда, представленного на Фиг. 1, с игольной направляющей, прикрепленной к дистальному концу указанного зонда и окружающей его.
Фиг. 3 иллюстрирует расположение контрольной плоскости и расположение плоскости введения зонда и игольной направляющей, изображенных на Фиг. 1 и 2.
На Фиг. 4 изображена игольная направляющая, прикрепленная к концу зонда, с окружающим устройством кодирования расположения иглы и беспроводным устройством связи.
Фиг. 5a иллюстрирует игольную направляющую в соответствии с настоящим изобретением, в которой используется оптическое устройство кодирования расположения иглы.
Фиг. 5b иллюстрирует игольную направляющую в соответствии с настоящим изобретением, в которой используется резистивное устройство кодирования расположения иглы.
На Фиг. 6 изображена взаимная зависимость между плоскостью введения иглы и расположением двух проекций, в которой указанная плоскость введения находится в зависимости от области пространства, которая может быть сканирована 3D зондом для визуализации.
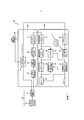
На Фиг. 7 изображена в виде блок-схемы ультразвуковая система с игольной направляющей, выполненной в соответствии с принципами настоящего изобретения.
Фиг. 8 и 9 иллюстрируют игольную направляющую согласно настоящему изобретению со множеством углов наклона для введения иглы.
Фиг. 10 иллюстрирует ультразвуковое отображение множества игл, которые использовались для процедуры микроволновой абляции.
Прежде всего, что касается Фиг. 1, изображен 3D ультразвуковой зонд 12 для визуализации, который держат за его проксимальный конец (к которому крепится кабель), с игольной направляющей 14 согласно настоящему изобретению, прикрепленной к дистальному концу (акустическому окну) указанного зонда. Игольная направляющая 14 фиксируется к зонду с неизменной ориентацией путем выравнивания с отличительным признаком данного зонда, таким как его метка ориентации зонда. Метка ориентации зонда представляет собой признак, обычно расположенный на боковой стороне дистального конца зонда, который используется врачом-клиницистом для соотнесения ориентации зонда на объекте к ориентации анатомической области на ультразвуковом изображении. Например, см. патент США 5,255,682 (Pawluskiewicz и др.). В выполняемом варианте осуществления зонд 12 имеет метку ориентации в виде выступа, выровненного с совмещаемым пазом во внутренней окружности игольной направляющей, в связи с чем обеспечивается возможность прикрепления игольной направляющей к зонду только с одной известной ориентацией. В случае надлежащего прикрепления передняя поверхность игольной направляющей выравнивается с передней поверхностью линзы 71 зонда, как изображено на виде сверху передней поверхности обоих компонентов на Фиг. 2. Иллюстрируемая игольная направляющая представляет собой кольцеобразную структуру с рядом отверстий 40, расположенных под наклоном вокруг указанной направляющей. Данные отверстия немного больше размера иглы, вместе с которой подлежит использовать указанную направляющую, достаточно малы для того, чтобы ограничивать траекторию введения иглы, при этом достаточно велики для того, чтобы врач-клиницист имел возможность двигать и направлять иглу по мере ее введения. В случае иллюстрируемой игольной направляющей по окружности кольцеобразной направляющей располагаются тридцать шесть отверстий 40, расположенных с равными интервалами, по одному через каждые 10°. Данные отверстия расположены под наклоном таким образом, что траектория вводимой иглы направлена под линзу 71 и проходит внутрь апертуры зонда. В иллюстрируемом варианте осуществления указанные отверстия наклонены под углом 20° относительно оси, перпендикулярной к передней поверхности линзы зонда. Зонд 12 представляет собой 3D зонд для визуализации, который, предпочтительно, имеет двухмерную матрицу преобразовательных элементов, с помощью которой пирамидальный или трапециевидный объем впереди линзы может сканироваться путем наведения электронного пучка. Механически сканирующие 3D зонды также могут применяться. По мере того как игла направляется внутрь объекта с помощью игольной направляющей, ее траектория введения направляется внутрь области пространства, изображение которой может быть получено с помощью 3D зонда 12. Фиг. 3 иллюстрирует контрольную плоскость 42, выступающую под прямым углом к передней поверхности линзы 71 и ортогональную к концам 2D матричного зонда. На данном чертеже изображено отверстие 40 (увеличенное в иллюстративных целях), через которое игла может вводиться по траектории введения на плоскости изображения зонда, расположенной под углом θ относительно контрольной плоскости 42.
На Фиг. 4 изображена игольная направляющая 14 с ротационным устройством 44 кодирования, которое идентифицирует расположение отверстия вокруг направляющей, через которое вводится игла. При введении иглы через отверстие в направляющей 14, соответствующее положению восемь часов на Фиг. 4, указанное устройство кодирования распознает плоскость сканирования в положении θ относительно контрольной плоскости 42, в котором траектория введения иглы может быть отображена. Если игла вводится через отверстие в положении четырех часов, например, указанное устройство кодирования распознает плоскость сканирования в положении - θ, в котором траектория введения может быть отображена. Распознаваемая плоскость сканирования сообщается с ультразвуковой системой, управляющей зондом, посредством либо проводного соединения, либо беспроводного соединения, такого как устройство 60 коммуникационной связи Bluetooth. Электропитание для устройства кодирования может обеспечиваться с помощью либо проводного соединения, либо аккумуляторной батареи 62.
Устройство кодирования может быть выполнено несколькими способами. Один из способов состоит в использовании оптического кодирования, как изображено на Фиг. 5a. В данном варианте осуществления имеется ряд световых излучателей, таких как светодиоды 46, которые направляют свет через отверстия 40 на приемники света с другой стороны отверстий. При введении иглы сквозь конкретное отверстие указанная игла заблокирует прохождение света к приемнику, соответствующему данному отверстию, и тогда сигнал указанного приемника идентифицирует данное конкретное отверстие и его соответственную плоскость сканирования как отверстие, через которое вводится игла. Ультразвуковой зонд и ультразвуковая система затем сформируют изображение распознанной плоскости сканирования и иглы, вводимой в данную плоскость. Как изображено на Фиг. 5a, при введении иглы сквозь отверстие 40, соответствующее положению игольной направляющей восемь часов, сигнал оптического приемника идентифицирует плоскость θ сканирования как плоскость траектории введения иглы.
Другой вариант осуществления устройства кодирования, в котором используется резистивное устройство кодирования, изображен на Фиг. 5b. В данном варианте осуществления устройство 44 кодирования имеет внешнее контактное кольцо с одним или несколькими отверстиями или канавками 84, через которые может быть введена игла. Указанное внешнее контактное кольцо 58 может вращаться вокруг внутреннего кольца 56, которое имеет резистивный контур 48 по окружности указанного кольца. Внешнее контактное кольцо имеет скользящий контакт 82 в известной взаимной зависимости с положением отверстия или канавки 84 внешнего контактного кольца 58, который находится в электрическом контакте с указанным резистивным контуром 48. Указанные скользящий контакт и резистивный контур, тем самым, работают как потенциометр таким образом, что электрическое измерение между «+» и «-» терминалами, электрически соединенными со скользящим контактом 82 и концом резистивного контура, идентифицирует положение отверстия или канавки по окружности указанной кольцеобразной структуры. Данная информация о положении сообщается в ультразвуковую систему для идентификации плоскости траектории введения иглы, подлежащей сканированию с помощью зонда и ультразвуковой системы. Множество отверстий или канавок могут быть индивидуально идентифицированы путем подключения дополнительного сопротивления последовательно с соответствующим терминалом, так что диапазон значений сопротивления, сообщаемый для одного отверстия, не перекрывает диапазон значений сопротивления для других.
На Фиг. 6 изображена иллюстрация взаимной зависимости между 3D зондом 12 для визуализации, объемом 100, который может быть сканирован с помощью указанного зонда, и выбранной плоскостью 102 сканирования, в которой находится поле 104 изображения указанного зонда. При введении иглы 110 через отверстие или канавку в игольной направляющей 14 игла ограничивается траекторией, которая оказывается в поле зрения ниже акустического окна зонда. Поскольку указанный зонд является 3D зондом для визуализации, он выполнен с возможностью сканирования ориентации многочисленных плоскостей в объеме 100. Ротационное устройство кодирования игольной направляющей 14 идентифицирует конкретное отверстие, через которое вводится игла, что соответствует конкретной ориентации 102 плоскости сканирования, изображение которой может быть получено посредством 3D зонда для визуализации. Затем зонд 12 формирует изображение идентифицированной ориентации плоскости сканирования, как иллюстрируется с помощью области 104 секторного сканирования в плоскости 102. Потом врач-клиницист может следить за продвижением иглы 110, по мере ее введения по траектории введения в области 104 секторного сканирования, до тех пор, пока кончик 112 иглы не достигнет заданной анатомической области.
Фиг. 7 иллюстрирует ультразвуковой зонд, игольную направляющую и ультразвуковую систему, выполненные в соответствии с принципами настоящего изобретения. Ультразвуковая система 10 сконфигурирована посредством двух подсистем, подсистемы 10A первоначального сбора данных и подсистемы 10B отображения. К подсистеме сбора данных подсоединяется 3D ультразвуковой зонд 12, в состав которого входят двухмерный матричный датчик 70 и устройство 72 формирования микропучка. Указанное устройство формирования микропучка содержит электронные схемы, которые управляют сигналами, подаваемыми группам элементов («пэтчи») матричного датчика 70, и выполняет некоторую обработку эхо-сигналов, получаемых элементами каждой группы. Формирование микропучка в зонде успешно снижает количество токопроводящих жил в кабеле между указанным зондом и ультразвуковой системой, что описывается в патентах США 5,997,479 (Savord и др.) и 6,436,048 (Pesque), и обеспечивает электронное управление пучками при передаче и приеме для 2D или 3D визуализации в реальном времени (прямой визуализации) с высокой частотой передачи кадров.
Зонд 12 соединен с подсистемой 10A сбора данных ультразвуковой системы. Указанная подсистема сбора данных включает в себя контроллер 74 формирования пучка, которым легко управлять с помощью пользовательского устройства 36 управления и, для настоящего изобретения, отпирающего сигнала, который предоставляет сигналы управления в устройство 72 формирования микропучка, посылая зонду команды в отношении тайминга, частоты, направления и фокусировки передачи и приема лучей и плоскости или плоскостей, подлежащих сканированию этими пучками. Указанный контроллер формирования пучка также управляет системным формированием пучка эхо-сигналов, получаемых подсистемой сбора данных, посредством ее контроля аналого-цифровых (A/D) преобразователей 18 и устройства 20 формирования пучка. Частично сформированные в пучок эхо-сигналы, полученные от зонда, усиливаются с помощью предусилителя и схемы 16 ДРУ (дифференциальной регулировки усиления) в подсистеме сбора данных, после этого преобразовываются в цифровую форму посредством A/D преобразователей 18. Оцифрованные эхо-сигналы затем формируются в полностью управляемые и сфокусированные пучки с помощью главного системного устройства 20 формирования пучка. Указанные эхо-сигналы далее обрабатываются процессором 22 обработки изображений, который выполняет цифровую фильтрацию, распознавание режимов B и M и обработку данных по доплеровской частоте, а также может выполнять другую обработку сигналов, такую как разделение гармоник, понижение уровня спеклов и другую необходимую обработку сигнала изображения.
Эхо-сигналы, выработанные подсистемой 10A сбора данных, поступают в подсистему 10B отображения, которая обрабатывает указанные эхо-сигналы для отображения в желаемом формате изображения. Эхо-сигналы обрабатываются с помощью процессора 24 линий изображения, который выполнен с возможностью осуществлять выборку эхо-сигналов, соединять сегменты пучков в полные линейные сигналы, а также усреднять линейные сигналы для улучшения отношения сигнал-помеха или потокового послесвечения. Развертка линий изображения для 2D изображения преобразуется в желаемый формат изображения с помощью преобразователя 26 развертки, который выполняет конвертирование азимута и дальности (R-theta), как известно в данной области техники. Указанный преобразователь развертки может, таким образом, задавать прямолинейный или секторный форматы изображения. Затем изображение сохраняется в памяти 28 изображений, из которой оно может быть отображено на дисплее 38. На указанное изображение в памяти также накладываются графические данные, подлежащие отображению вместе с данным изображением, которые генерируются генератором 34 элементов графических изображений, которым легко управлять с помощью пользовательского устройства 36 управления, так что создаваемые графические данные соотносятся с изображениями на дисплее. Индивидуальные изображения или последовательности изображений могут храниться в кинопамяти 30 во время съемки повторов изображений или их последовательностей.
Для пространственной визуализации в реальном времени подсистема 10B отображения также включает в себя процессор 32 визуального воспроизведения 3D изображений, который получает линии изображения от процессора 24 линий изображения для визуального воспроизведения трехмерных изображений в реальном времени. 3D изображения могут отображаться как прямые (в реальном времени) 3D изображения на дисплее 38 либо отправляться в память 28 изображений для хранения пакетов 3D данных для более позднего рассмотрения и постановки диагноза.
В соответствии с настоящим изобретением сигнал идентификации плоскости сканирования, производимый игольной направляющей 14, который идентифицирует плоскость сканирования, в которой игла, вводимая через указанную игольную направляющую, будет проходить и может быть отображена, поступает в процессор 52 идентификации плоскости. Сигнал идентификации плоскости, создаваемый указанным процессором 52 идентификации плоскости, поступает в генератор 54 сигнала запуска, который создает отпирающий сигнал, дающий команду контроллеру 74 формирования пучка управлять сканированием заданной плоскости сканирования, в каждой из которых располагается траектория введения иглы. Контроллер 74 формирования пучка управляет устройством 72 формирования микропучка для сканирования заданной плоскости сканирования и производит эхо-сигналы от сканирования указанной заданной плоскости, которые частично формируются в пучок посредством указанного устройства формирования микропучка и отправляются в системное устройство 20 формирования пучка для завершения формирования пучка строк развертки в заданной плоскости. Указанные строки развертки данной плоскости обрабатываются с помощью процессора 24 линий изображения, и их развертка преобразуется в двухмерное изображение идентифицированной плоскости, которое отображается на дисплее 38. Указанная идентифицированная плоскость сканирования может быть отображена как единственная тонкая плоскость в пределах разрешающей способности зонда и системы, но также может быть отображена как сектор изображения большой толщины, которая больше толщины единственной тонкой плоскости, как описывается в публикации патента США номер US 2010/0168580 A1 (Thiele и др.). Применение визуализации секторов большой ширины дает возможность непрерывного визуального представления иглы на изображении, даже в случае если ее траектория введения отклоняется от идеально прямой линии, при условии, что указанная траектория остается в пределах толщины указанного сектора изображения большой ширины.
Фиг. 8 и 9 иллюстрируют другую игольную направляющую согласно настоящему изобретению, через которую иглы 110 могут быть введены под различными углами α, β и γ наклона. Вид в поперечном сечении, изображенный на Фиг. 8, иллюстрирует три иглы 110, 110' и 110ʺ, введенные через различные отверстия 40 игольной направляющей, которая направляет указанные иглы по траекториям введения, расположенные под наклоном под углами γ, β и α соответственно. Каждая группа из трех отверстий в конкретном угловом положении по окружности указанной направляющей будет направлять данные иглы по траектории введения в одной и той же плоскости сканирования, две из которых, θ1 и θ2, изображены на Фиг. 9, в зависимости от центральной контрольной плоскости 42. Игольная направляющая 14, изображенная на Фиг. 8 и 9, дает возможность врачу-клиницисту получать доступ к заданной анатомической области на различной глубине ниже зонда при идентификации плоскости сканирования каждой траектории введения.
В случае данной инвазивной процедуры может потребоваться осуществить доступ к анатомической области в теле с помощью нескольких инвазивных инструментов одновременно. Как иллюстрируют Фиг. 4 и 9, множество игл могут быть введены в одно и то же время в различных идентифицированных плоскостях сканирования θ1 и θ2, или +θ и -θ, например. При использовании двух траекторий введения через направляющую указанная направляющая сообщит идентификационные характеристики двух различных ориентаций плоскостей сканирования в процессор идентификации плоскости, который заставит ультразвуковую систему 10 поочередно сканировать различные плоскости. Два разных инструмента могут применяться для микроволновой абляции заданной анатомической области, например, и в данном случае, врач-клиницист захочет визуально наводить обе абляционные иглы на заданную цель, так чтобы их кончики находились в контакте с анатомической областью, подлежащей абляции. Фиг. 10 иллюстрирует ультразвуковой дисплей, на котором отображаются четыре различных изображения инвазивной процедуры с использованием игольной направляющей согласно настоящему изобретению. В данном примере три различные иглы 110α, 110β и 110γ применялись и отображаются одновременно. Игла 110α отображена на ультразвуковом изображении 202 плоскости сканирования траектории введения иглы 110α, и граница 202a данного изображения окрашена в уникальный цвет, например синий, для различения изображения иглы 110α. Идентификация и окрашивание иглы на ультразвуковом изображении могут выполняться посредством техники сегментации, которая определенно идентифицирует данную иглу на изображении из окружающей ее ткани, как описывается в публикации патента США номер 2004/0002653 (Greppi и др.) и в статье «Улучшение визуальной различимости иглы при чрескожных процедурах, управляемых ультразвуком» («Enhancement of Needle Visibility in Ultrasound-guided Percutaneous Procedures», S.Cheung и др., Ultrasound in Med. & Biol., том 30, номер 5(2004), стр. 617-24), например. Аналогично, иглы 110β и 110γ отображены на соответствующих 2D изображениях 204 и 206 их траекторий введения и обозначены специфическими цветами 204a и 206a, например красным и желтым. Изображение 201 является полным 3D волюметрическим изображением участка данной процедуры, которое иллюстрирует заданную анатомическую область, в которую доступ осуществлен с помощью всех трех игл. На 3D изображении каждая игла окрашена в свой специфический цвет, синий, красный или желтый, так что врач-клиницист может с легкостью соотнести каждую из игл на 3D изображении с ее собственным 2D изображением плоскости введения. Каждая плоскость 2D изображения и полный 3D объем сканируется с временным уплотнением, при этом индивидуальные плоскости введения сканируются с большей частотой повторения (и, следовательно, кадровой частотой дисплея в реальном времени), чем указанное 3D изображение. Как только иглы достигают их требуемых положений в заданной анатомической области, индивидуальные 2D изображения могут быть зафиксированы на экране, так что время сбора данных полностью посвящается формированию 3D изображения, и процедура в заданной анатомической области может продолжаться с целью получения прямого изображения в 3D.
Практическая реализация игольной направляющей и ультразвуковой системы в соответствии с настоящим изобретением может сопровождаться использованием других направляющих, чтобы помочь врачу-клиницисту планировать и проводить процедуру введения иглы, например, путем направления врача-клинициста при введении иглы с целью избежать твердых тканей и опасных анатомических областей, как описывается в заявке на патент США номер 61/587,784, поданной 18 января 2012 г. и озаглавленной «Ультразвуковой контроль направления траектории иглы во время биопсии» («ULTRASONIC GUIDANCE OF A NIDDLE PATH DURING BIOPSY», Kudavelly и др.). Избегание твердых тканей в траектории введения может помочь предотвратить отклонение и изгибание иглы во время введения. Помощь данного наведения может быть использована для планирования траектории введения до начала процедуры либо для осуществления наведения по мере того, как вводится игла.
Claims (21)
1. Ультразвуковая система визуализации с визуальным направлением введения множества инвазивных устройств, причем система содержит:
3D ультразвуковой зонд для визуализации, выполненный с возможностью визуализации различных плоскостей изображения в области пространства, причем 3D ультразвуковой зонд для визуализации включает в себя двумерный матричный датчик;
игольную направляющую, которая имеет такие размеры, чтобы присоединяться к зонду для визуализации с заранее заданной ориентацией относительно зонда для визуализации, причем игольная направляющая имеет множество положений введения иглы для направления множества игл для введения внутрь области пространства за счет различных плоскостей введения иглы, так что первая плоскость введения иглы и вторая плоскость введения иглы плоскостей введения иглы ориентированы под различными углами относительно контрольной плоскости изображения, ортогональной концам двумерного матричного датчика; и
ультразвуковую систему, соединенную с зондом и выполненную с возможностью управления 3D ультразвуковым зондом для визуализации для формирования множества 2D изображений, одновременно образованных из плоскостей изображения, соответствующих различным плоскостям введения иглы.
2. Ультразвуковая система визуализации по п. 1, в которой упомянутая ультразвуковая система дополнительно содержит подсистему отображения, которая формирует множество различно кодированных 2D изображений разных плоскостей введения иглы.
3. Ультразвуковая система визуализации по п. 2, в которой различно кодированные 2D изображения имеют различный цветовой код.
4. Ультразвуковая система визуализации по п. 3, в которой различно кодированные 2D изображения отображают иглы, имеющие различный цветовой код, на разных изображениях.
5. Ультразвуковая система визуализации по п. 3, в которой различно кодированные 2D изображения имеют границы, окрашенные в различные цвета.
6. Ультразвуковая система визуализации по п. 1, в которой упомянутая ультразвуковая система дополнительно управляет 3D ультразвуковым зондом для визуализации с целью формирования волюметрического 3D изображения,
причем упомянутая ультразвуковая система дополнительно содержит подсистему отображения, которая одновременно формирует множество 2D изображений и волюметрическое 3D изображение.
7. Ультразвуковая система визуализации по п. 6, в которой волюметрическое 3D изображение отображает множество игл в отчетливо различаемых цветах.
8. Ультразвуковая система визуализации по п. 7, в которой во множестве 2D изображений каждое имеет различный цветовой код,
причем волюметрическое 3D изображение отображает множество игл в различаемых цветах, соответствующих цветовому кодированию 2D изображений.
9. Ультразвуковая система визуализации по п. 1, в которой положения введения иглы дополнительно содержат множество отверстий или канавок для введения иглы на игольной направляющей, расположенных вокруг прикрепленного зонда для визуализации.
10. Ультразвуковая система визуализации по п. 9, в которой игольная направляющая дополнительно содержит датчик введения иглы, ассоциированный с каждым из множества отверстий или канавок для введения иглы, который распознает введение иглы и идентифицирует плоскость введения вводимой иглы.
11. Ультразвуковая система визуализации по п. 10, в которой датчик введения иглы дополнительно содержит оптический датчик.
12. Ультразвуковая система визуализации по п. 10, в которой датчик введения иглы дополнительно содержит резистивный датчик.
13. Ультразвуковая система визуализации по п. 10, в которой датчик введения иглы сообщает идентификационные характеристики множества различно ориентированных плоскостей введения, включающих в себя первую плоскость введения иглы и вторую плоскость введения иглы, в упомянутую ультразвуковую систему,
причем упомянутая ультразвуковая система реагирует на сообщение идентификационных характеристик множества различно ориентированных плоскостей введения с целью управления 3D ультразвуковым зондом для визуализации для сканирования только различно ориентированных плоскостей введения, идентифицируемых в области пространства.
14. Ультразвуковая система визуализации по п. 1, в которой множество инвазивных устройств дополнительно содержит множество игл для радиочастотной абляции.
15. Ультразвуковая система визуализации по п. 1, в которой множество инвазивных устройств дополнительно содержит множество игл для биопсии.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261665539P | 2012-06-28 | 2012-06-28 | |
| US61/665,539 | 2012-06-28 | ||
| PCT/IB2013/054992 WO2014001963A1 (en) | 2012-06-28 | 2013-06-18 | Ultrasonic guidance of multiple invasive devices in three dimensions |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2015102538A RU2015102538A (ru) | 2016-08-20 |
| RU2644540C2 true RU2644540C2 (ru) | 2018-02-12 |
Family
ID=49036608
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2015102538A RU2644540C2 (ru) | 2012-06-28 | 2013-06-18 | Трехмерное ультразвуковое наведение множества инвазивных устройств |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10123767B2 (ru) |
| EP (1) | EP2866671B1 (ru) |
| JP (1) | JP6165244B2 (ru) |
| CN (1) | CN104427944B (ru) |
| BR (1) | BR112014032134B1 (ru) |
| RU (1) | RU2644540C2 (ru) |
| WO (1) | WO2014001963A1 (ru) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3136967B1 (en) * | 2014-04-29 | 2021-10-20 | The Board of Regents of The University of Texas System | Systems for detecting sub-tissue anomalies |
| EP4011298B1 (en) * | 2014-11-18 | 2025-03-05 | C. R. Bard, Inc. | Ultrasound imaging system having automatic image presentation |
| US10869613B2 (en) * | 2015-12-16 | 2020-12-22 | Canon U.S.A., Inc. | Medical guidance device |
| GB2552544A (en) | 2016-07-29 | 2018-01-31 | Micrima Ltd | A medical imaging system and method |
| US10932749B2 (en) * | 2016-11-09 | 2021-03-02 | Fujifilm Sonosite, Inc. | Ultrasound system for enhanced instrument visualization |
| WO2019016343A1 (en) | 2017-07-21 | 2019-01-24 | Khonsari Sassan | ULTRASONIC IMAGING SYSTEM WITH TRANSVERSE PLANE FOR INSTRUMENT GUIDANCE COMBINED IN THE PLAN AND OUTSIDE THE PLAN |
| CN107307844A (zh) * | 2017-07-21 | 2017-11-03 | 温州星康医学科技有限公司 | 一种智能化视功能预检仪 |
| US11197723B2 (en) * | 2017-10-09 | 2021-12-14 | Canon U.S.A., Inc. | Medical guidance system and method using localized insertion plane |
| EP3806748A1 (en) | 2018-06-15 | 2021-04-21 | Koninklijke Philips N.V. | Synchronized tracking of multiple interventional medical devices |
| CN108969087B (zh) * | 2018-08-06 | 2023-12-26 | 广州复大医疗有限公司 | 用于肿瘤消融术中的多角度探针定位及针间距测量装置 |
| CN109029212B (zh) * | 2018-08-06 | 2023-12-05 | 广州复大医疗有限公司 | 用于经皮消融术中的探针定位及针间距测量装置 |
| US11191423B1 (en) * | 2020-07-16 | 2021-12-07 | DOCBOT, Inc. | Endoscopic system and methods having real-time medical imaging |
| WO2022240770A1 (en) * | 2021-05-10 | 2022-11-17 | Excera Inc. | Multiscale ultrasound tracking and display |
| US20230329750A1 (en) * | 2022-04-15 | 2023-10-19 | Radian Llc | Devices and methods to improve efficacy and efficiency of locating the sacral foramina during sacral neuromodulation procedure |
| US20250375182A1 (en) * | 2024-06-07 | 2025-12-11 | Fujifilm Sonosite, Inc. | Ultrasonic needle localization |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6203499B1 (en) * | 1998-10-05 | 2001-03-20 | Atl Ultrasound Inc. | Multiple angle needle guide |
| US20020123689A1 (en) * | 2001-03-05 | 2002-09-05 | Roberto Furia | Needle-guide device, particularly for ultrasound probes |
| RU80105U1 (ru) * | 2006-12-27 | 2009-01-27 | ГОУ ВПО "Саратовский государственный университет имени Н.Г. Чернышевского" | Устройство для получения трехмерных ультразвуковых изображений внутренних органов человека |
| WO2010013175A1 (en) * | 2008-08-01 | 2010-02-04 | Koninklijke Philips Electronics, N.V. | Three dimensional imaging ultrasound probe |
| US20100240997A1 (en) * | 2009-03-23 | 2010-09-23 | Kabushiki Kaisha Toshiba | Ultrasound diagnosis apparatus and a centesis supporting method |
| WO2011114259A1 (en) * | 2010-03-19 | 2011-09-22 | Koninklijke Philips Electronics N.V. | Automatic positioning of imaging plane in ultrasonic imaging |
| WO2012003369A2 (en) * | 2010-06-30 | 2012-01-05 | Muffin Incorporated | Percutaneous, ultrasound-guided introduction of medical devices |
| US20120298704A1 (en) * | 2011-05-25 | 2012-11-29 | Angel Sanz | No-roll-container |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5255682A (en) | 1990-11-14 | 1993-10-26 | Advanced Technology Laboratories, Inc. | Ultrasonic diagnostic imaging systems with scanhead indicators |
| CN2221941Y (zh) * | 1995-01-17 | 1996-03-13 | 董天清 | 导向针槽三维可调式超声导向器 |
| CA2226938A1 (en) * | 1995-07-16 | 1997-02-06 | Yoav Paltieli | Free-hand aiming of a needle guide |
| JPH11197155A (ja) | 1998-01-14 | 1999-07-27 | Aloka Co Ltd | 超音波穿刺プローブ |
| US5997479A (en) | 1998-05-28 | 1999-12-07 | Hewlett-Packard Company | Phased array acoustic systems with intra-group processors |
| US6351660B1 (en) * | 2000-04-18 | 2002-02-26 | Litton Systems, Inc. | Enhanced visualization of in-vivo breast biopsy location for medical documentation |
| US6468216B1 (en) | 2000-08-24 | 2002-10-22 | Kininklijke Philips Electronics N.V. | Ultrasonic diagnostic imaging of the coronary arteries |
| US6951542B2 (en) | 2002-06-26 | 2005-10-04 | Esaote S.P.A. | Method and apparatus for ultrasound imaging of a biopsy needle or the like during an ultrasound imaging examination |
| US6733458B1 (en) * | 2001-09-25 | 2004-05-11 | Acuson Corporation | Diagnostic medical ultrasound systems and methods using image based freehand needle guidance |
| JP2004305535A (ja) * | 2003-04-09 | 2004-11-04 | Ge Medical Systems Global Technology Co Llc | 超音波診断装置 |
| JP4828802B2 (ja) * | 2004-05-12 | 2011-11-30 | 株式会社東芝 | 穿刺治療のための超音波診断装置 |
| JP2005319173A (ja) * | 2004-05-11 | 2005-11-17 | Hitachi Medical Corp | 超音波プローブ及び超音波撮像装置 |
| US20100312129A1 (en) * | 2005-01-26 | 2010-12-09 | Schecter Stuart O | Cardiovascular haptic handle system |
| CN100459950C (zh) * | 2006-11-30 | 2009-02-11 | 上海交通大学 | 图像引导的水冷式射频消融肿瘤治疗一体机 |
| JP2008148914A (ja) | 2006-12-18 | 2008-07-03 | Ge Medical Systems Global Technology Co Llc | 3d/4dプローブ用穿刺ガイド装置および超音波診断装置 |
| EP2147331B1 (en) | 2007-04-13 | 2017-07-19 | Koninklijke Philips N.V. | High speed ultrasonic thick slice imaging |
| JP2009153831A (ja) * | 2007-12-27 | 2009-07-16 | Ge Medical Systems Global Technology Co Llc | 穿刺ガイドの取付構造、超音波プローブ及び超音波診断装置 |
| EP2323561A1 (en) * | 2008-08-12 | 2011-05-25 | Koninklijke Philips Electronics N.V. | Ultrasound imaging |
| JP2010068923A (ja) * | 2008-09-17 | 2010-04-02 | Fujifilm Corp | 超音波診断装置 |
| EP2341836B1 (en) * | 2008-09-24 | 2017-03-22 | Koninklijke Philips N.V. | Generation of standard protocols for review of 3d ultrasound image data |
| US8086298B2 (en) * | 2008-09-29 | 2011-12-27 | Civco Medical Instruments Co., Inc. | EM tracking systems for use with ultrasound and other imaging modalities |
| US9895135B2 (en) * | 2009-05-20 | 2018-02-20 | Analogic Canada Corporation | Freehand ultrasound imaging systems and methods providing position quality feedback |
| WO2013108198A1 (en) | 2012-01-18 | 2013-07-25 | Koninklijke Philips N.V. | Ultrasonic guidance of a needle path during biopsy |
| US8670816B2 (en) * | 2012-01-30 | 2014-03-11 | Inneroptic Technology, Inc. | Multiple medical device guidance |
-
2013
- 2013-06-18 US US14/409,715 patent/US10123767B2/en active Active
- 2013-06-18 JP JP2015519410A patent/JP6165244B2/ja not_active Expired - Fee Related
- 2013-06-18 EP EP13753345.1A patent/EP2866671B1/en active Active
- 2013-06-18 WO PCT/IB2013/054992 patent/WO2014001963A1/en not_active Ceased
- 2013-06-18 BR BR112014032134-5A patent/BR112014032134B1/pt active IP Right Grant
- 2013-06-18 CN CN201380034170.5A patent/CN104427944B/zh active Active
- 2013-06-18 RU RU2015102538A patent/RU2644540C2/ru active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6203499B1 (en) * | 1998-10-05 | 2001-03-20 | Atl Ultrasound Inc. | Multiple angle needle guide |
| US20020123689A1 (en) * | 2001-03-05 | 2002-09-05 | Roberto Furia | Needle-guide device, particularly for ultrasound probes |
| RU80105U1 (ru) * | 2006-12-27 | 2009-01-27 | ГОУ ВПО "Саратовский государственный университет имени Н.Г. Чернышевского" | Устройство для получения трехмерных ультразвуковых изображений внутренних органов человека |
| WO2010013175A1 (en) * | 2008-08-01 | 2010-02-04 | Koninklijke Philips Electronics, N.V. | Three dimensional imaging ultrasound probe |
| US20100240997A1 (en) * | 2009-03-23 | 2010-09-23 | Kabushiki Kaisha Toshiba | Ultrasound diagnosis apparatus and a centesis supporting method |
| WO2011114259A1 (en) * | 2010-03-19 | 2011-09-22 | Koninklijke Philips Electronics N.V. | Automatic positioning of imaging plane in ultrasonic imaging |
| WO2012003369A2 (en) * | 2010-06-30 | 2012-01-05 | Muffin Incorporated | Percutaneous, ultrasound-guided introduction of medical devices |
| US20120298704A1 (en) * | 2011-05-25 | 2012-11-29 | Angel Sanz | No-roll-container |
Also Published As
| Publication number | Publication date |
|---|---|
| BR112014032134A2 (pt) | 2017-06-27 |
| CN104427944A (zh) | 2015-03-18 |
| BR112014032134B1 (pt) | 2022-01-04 |
| CN104427944B (zh) | 2017-08-11 |
| JP6165244B2 (ja) | 2017-07-19 |
| US10123767B2 (en) | 2018-11-13 |
| BR112014032134A8 (pt) | 2018-07-03 |
| US20150173706A1 (en) | 2015-06-25 |
| JP2015527109A (ja) | 2015-09-17 |
| WO2014001963A1 (en) | 2014-01-03 |
| WO2014001963A9 (en) | 2015-02-26 |
| EP2866671B1 (en) | 2019-10-30 |
| RU2015102538A (ru) | 2016-08-20 |
| EP2866671A1 (en) | 2015-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2644540C2 (ru) | Трехмерное ультразвуковое наведение множества инвазивных устройств | |
| EP2866672B1 (en) | Ultrasonically guided biopsies in three dimensions | |
| JP4579686B2 (ja) | ユーザ誘導3次元ボリューム・スキャン・シーケンス用の超音波撮像システム及び方法 | |
| JP7047556B2 (ja) | 超音波診断装置及び穿刺針のずれ角度算出方法 | |
| US20140039316A1 (en) | Ultrasonic diagnostic apparatus and ultrasonic image processing method | |
| US20090306511A1 (en) | Ultrasound imaging apparatus and method for generating ultrasound image | |
| US20090069679A1 (en) | Ultrasound diagnostic apparatus | |
| CN113164156A (zh) | 用于引导式超声数据采集的系统和方法 | |
| CN111629671A (zh) | 超声成像设备及控制超声成像设备的方法 | |
| JP2005323669A (ja) | 穿刺治療のための超音波診断装置 | |
| JP2006523115A (ja) | 結合された三次元超音波イメージングシステムを用いて侵襲的医療装置を案内する方法 | |
| WO2015092628A1 (en) | Ultrasound imaging systems and methods for tracking locations of an invasive medical device | |
| JPWO2012017827A1 (ja) | 超音波画像装置と超音波画像を用いた三次元画像表示方法 | |
| JP6202841B2 (ja) | 超音波診断装置 | |
| CN103635142B (zh) | 超声波诊断装置以及传感器选定装置 | |
| US20160151039A1 (en) | Ultrasound diagnosis apparatus | |
| US12127878B2 (en) | Ultrasound diagnostic device and storage medium | |
| JP2009061076A (ja) | 超音波診断装置 | |
| JP2008253499A (ja) | 超音波診断装置 |