RU2551932C2 - Минимально инвазивные лапароскопические хирургические щипцы - Google Patents
Минимально инвазивные лапароскопические хирургические щипцы Download PDFInfo
- Publication number
- RU2551932C2 RU2551932C2 RU2012121809/14A RU2012121809A RU2551932C2 RU 2551932 C2 RU2551932 C2 RU 2551932C2 RU 2012121809/14 A RU2012121809/14 A RU 2012121809/14A RU 2012121809 A RU2012121809 A RU 2012121809A RU 2551932 C2 RU2551932 C2 RU 2551932C2
- Authority
- RU
- Russia
- Prior art keywords
- cables
- traction
- cross
- orientation
- traction cable
- Prior art date
Links
Images
Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2902—Details of shaft characterized by features of the actuating rod
- A61B2017/2903—Details of shaft characterized by features of the actuating rod transferring rotary motion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2939—Details of linkages or pivot points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Ophthalmology & Optometry (AREA)
- Surgical Instruments (AREA)
Abstract
Изобретение относится к медицине. Минимально инвазивные лапароскопические хирургические щипцы содержат зажимающее средство, установленное на вращающемся корпусе, первое и второе средства передачи движения зажимающего средства и вращающийся корпус, соответственно, содержащие, по меньшей мере один тяговый трос, состоящий из нескольких тросов, располагающихся так, что поперечное сечение по меньшей мере одного тягового троса, связанного с первым средством передачи движения, имеет изменяемую геометрию вдоль его пути прохода. В первой компоновке тросы в поперечном сечении располагаются так, что их продольные оси размещаются радиально. Во второй компоновке оси ориентированы в первом направлении. В третьей компоновке оси ориентированы во втором направлении, перпендикулярном первому направлению. 8 з.п. ф-лы, 4 ил.
Description
Область техники, к которой относится изобретение
Настоящее изобретение находит применение в области автоматизированной хирургии и конкретно относится к щипцам, пригодным для минимально инвазивной автоматизированной лапароскопической хирургии.
Щипцы, согласно настоящему изобретению, содержат кинематическую компоновку, снабженную способным открываться и закрываться зажимающим средством, которое монтируется на вращающемся корпусе. Щипцы, согласно изобретению, дополнительно содержат первое средство передачи движения зажимающего средства и второе средство передачи движения вращающегося корпуса.
Уровень изобретения
Существующие автоматизированные лапароскопические хирургические технологии позволяют выполнять операции с высокой точностью, обеспечивая значительные преимущества особенно при некоторых сложных операциях, в том числе тех, при которых имеется большая трудность доступа к месту операции. Настоящее изобретение, в частности, применимо к такому типу автоматизированной лапароскопической хирургии, которая является минимально инвазивной, поскольку выполняется через малые надрезы в пациенте. Эта технология широко используется в настоящее время, поэтому во многих случаях она используется в качестве альтернативы традиционной лапароскопической хирургии.
В этом типе автоматизированной хирургии используются устройства с роботизированной рукой, способной держать определенные приспособления и инструменты. В дополнение к хирургической точности, достигаемой использованием вычислений, связанных с этими операциями, с помощью таких механизмов может быть уменьшен прямой контакт хирурга с последующим снижением инфекций. Через малый надрез камеры и/или щипцы вводятся в пациента, чтобы выполнить различные операции с минимальной травмой и незначительным послеоперационным болевыми последствиями.
Термин "щипцы", как он используется здесь в соответствии с целевым использованием для задачи настоящего изобретения, должен пониматься как инструмент, предназначенный для присоединения к концу роботизированной руки. Этой роботизированной рукой обычно дистанционно управляет хирург, квалифицированный в автоматизированных лапароскопических операциях, и она конструируется так, чтобы захватывать и даже удерживать любой полезный инструмент, корпус или устройство.
Существует много типов лапароскопических щипцов, основанных на их движении и геометрии, варианты которых в значительной степени зависят от типа операции, для которой, в конечном счете, предназначены щипцы. При лапароскопической хирургической операции, как правило, используются несколько щипцов, обычно имеющих такую конфигурацию, что их дистальный конец снабжается зажимами, имеющими различные конфигурации, как упомянуто выше, например, с зубьями или без зубьев, имеющими прямую или изогнутую форму и т.д.
Один из примеров лапароскопических щипцов, используемых в автоматизированной лапароскопической хирургии, описывается в патенте США US6969385. Этот документ описывает щипцы, используемые в автоматизированном устройстве, состоящем из зажима, установленного на вращающемся корпусе. Зажим содержит пальцы, которые могут вращаться относительно друг друга. Передача вращательного движения пальцев зажима выполняется через тросы, обернутые вокруг желобчатых шкивов. Шкивы устанавливаются в соответствии с осями вращения пальцев и осью упомянутого вращающегося корпуса, который соответственно крепится к концу роботизированной руки.
Дополнительным примером передачи движения щипцов является передача движения посредством шестерней. В патенте US2009192521 описывается хирургический инструмент, состоящий из щипцов, содержащих неподвижный палец и подвижный палец. Подвижный палец щипцов приводится в движение через механизм зубчатой передачи.
Использование тросов и шкивов или шестерней в щипцах, как описано в этом документе, необходимо для передачи движения от средства привода к самим щипцам для их позиционирования и для движения зажима. Это приводит в результате к весьма сложному механизму щипцов. Эта механическая сложность очень важна в случае, когда тросы передачи движения должны пройти через сочлененный корпус, который обычно встречается в описанных выше щипцах. Тот факт, что тросы передачи должны пройти через сочлененный корпус, требует обеспечения дополнительных шкивов для возможности выполнения такой передачи движения от средства привода к зажиму.
Изобретение обеспечивает лапароскопические хирургические щипцы, имеющие конфигурацию, позволяющую передачу движения через кинематический сборочный узел, содержащий различные элементы вращения, от средства привода к вращающимся элементам. Этот кинематический сборочный узел щипцов содержит элементы, позволяющие позиционирование щипцов, и элементы, позволяющие перемещать зажимающее средство щипцов. Как будет показано здесь далее, с помощью лапароскопических хирургических щипцов, соответствующих настоящему изобретению, эта задача может быть решена с помощью простой, компактной и надежной конфигурации, приводящей в результате к дополнительным преимуществам, как будет показано далее.
Описание изобретения
Настоящее изобретение обеспечивает щипцы, пригодные для использования в роботизированной руке. Более конкретно, изобретение относится к щипцам, предназначенным для использования при выполнении минимально инвазивных лапароскопических хирургических операций, управляемых роботизированными руками.
В соответствии с изобретением, обеспечиваются щипцы для использования в автоматизированных лапароскопических хирургических операциях, имеющие основной корпус с проксимальным концом и дистальным концом. Проксимальный конец корпуса выполнен с возможностью установки в него универсального шарнира, способного выполнять два пассивных вращения. На дистальном конце основного корпуса прикрепляется кинематический сборочный узел, образованный вращающимся корпусом, который установлен на этом конце с возможностью вращения и снабжен зажимающим средством. Этот вращающийся корпус способен выполнять нескольких активных вращений.
Зажимающее средство щипцов, соответствующих изобретению, содержит по меньшей мере две подвижных части или пальца, которые могут вращаться с независимым приводом. Движение пальцев щипцов выполняется первым средством передачи движения. Для его части вращательное движение вращающегося корпуса выполняется через второе средство передачи движения. Упомянутые первое и второе средства передачи приводятся в движение средством привода, содержащим, например, электродвигатели. Объединение средства привода и первого и второго средств передачи позволяет щипцам должным образом позиционироваться и позволяет зажимающему средству открываться и закрываться, перемещая пальцы в направлениях друг к другу и друг от друга.
В соответствии с изобретением, первое и второе средства передачи движения содержат тяговые тросы, проходящие внутри основного корпуса вдоль него между проксимальным концом и дистальным концом. При использовании упомянутые тяговые тросы могут перемещаться вдоль длины упомянутого основного корпуса. Более конкретно, щипцы содержат по меньшей мере один тяговый трос, связанный с первым средством передачи движения, и один тяговый трос, связанный со вторым средством передачи движения. Первое средство передачи движения может содержать один или два тяговых троса, в зависимости от варианта осуществления щипцов, для управления одним или более пальцами щипцов, в зависимости от применения, для которого предназначены щипцы.
Каждый из упомянутых тяговых тросов образуется несколькими стальными тросами, предпочтительно, тремя, которые располагаются внутри покрывающей их оболочки. Тросы, образующие каждый тяговый трос, предпочтительно имеют круглое поперечное сечение, чтобы получить повышенную жесткость, насколько возможно, и, таким образом, избегать продольного изгиба при сжатии. При таком поперечном сечении трение тягового троса с оболочкой также уменьшается. Объединение нескольких тросов, чтобы образовать каждый тяговый трос для передачи движения щипцов обеспечивает необходимую жесткость для возможности работы как на сжатие, так и на растяжение, позволяя эффективную передачу мощности, как если бы это была передача через стержень. Геометрия поперечного сечения каждого тягового троса определяется расположением тросов, формирующих тяговый трос. В соответствии с изобретением, расположение тросов таково, что тяговый трос вблизи дистального конца основного корпуса имеет поперечное сечение с изменяемой геометрией вдоль его длины. Это условие выполняется по меньшей мере для тяговых тросов, связанных с первым средством передачи движения. Поэтому изменение геометрии поперечного сечения позволяет получить очень эффективное действие зажимающего средства.
Для конфигурации, описанной в связи с изобретением, щипцы могут вращаться вокруг первой оси и вращающийся корпус может вращаться вокруг второй оси. Первая ось и вторая ось могут располагаться, по существу, ортогонально друг другу.
В одном варианте осуществления щипцов, соответствующем изобретению, предпочтительно, чтобы изменение геометрии поперечного сечения каждого натяжного троса происходило следующим образом. Как указано выше, тяговые тросы проходят по длине через внутреннюю часть основного корпуса, определяя первую геометрическую компоновку поперечного сечения, в которой соответствующие тросы располагаются так, что в поперечном сечении их продольные оси имеют радиальную компоновку. Затем геометрия поперечного сечения тяговых тросов изменяется на вторую компоновку, в которой соответствующие кабели располагаются так, что в поперечном сечении их продольные оси располагаются в первой ориентации. Наконец, геометрия поперечного сечения изменяется на третью компоновку, в которой соответствующие тросы располагаются так, что в поперечном сечении их продольные оси располагаются во второй ориентации, отличной от упомянутой первой ориентации.
Другими словами, в первой геометрической компоновке поперечного сечения тяговых тросов, тросы каждого тягового троса на большей части длины основного корпуса располагаются радиально, так чтобы в поперечном сечении тяговые тросы имели, по существу, форму круга. Другими словами, если это тяговый трос, сформированный из трех тросов, например, как отмечено выше, тросы в таком случае могут быть расположены с их соответствующими продольными осями, по существу, в виде треугольника, если смотреть в поперечном сечении. На одном участке, соответствующем участку вблизи дистального конца основного корпуса, поперечное сечение одного и того же тягового троса изменяется на упомянутую вторую компоновку, в которой его тросы располагаются с их соответствующими продольными осями, выровненными поперек первой ориентации, например, горизонтально выровненными. Следовательно, достигается необходимая гибкость для преодоления изгиба соединения в направлении, параллельном его оси вращения. Наконец, поперечное сечение тягового троса изменяется на эту третью компоновку, при которой тросы располагаются с их соответствующими продольными осями, выровненными поперечно во второй ориентации, образуя угол с упомянутой первой ориентацией, например, 90°, то есть выравниваются вертикально. Таким образом, достигается необходимая гибкость для предотвращения сгибания соединения в направлении, перпендикулярном указанному выше.
Первое и второе средства передачи движения, содержащие дополнительные тяговые тросы, содержат вращающиеся барабаны для намотки по касательной тяговых тросов. Эти барабаны позволяют на упомянутом дистальном конце сборочного узла продольное перемещение тяговых тросов, которое должно преобразовываться во вращательное движение в двух направлениях, то есть, как для тяги, так и для сжатия, чтобы посредством вращения приводить в движение вращающийся корпус щипцов и их зажимающее средство. Упомянутые барабаны на периферии имеют канавки для намотки тяговых тросов. Вращающийся корпус щипцов образуется двумя упомянутыми барабанами, которые располагаются с перекрытием. Каждый из упомянутых барабанов для наматывания вращающегося корпуса неразъемно соединен с каждым пальцем зажима, соответственно. Изменение конфигурации поперечного сечения тяговых тросов (по меньшей мере тех, которые связаны с первым средством передачи) по мере движения вдоль их длины в направлении дистального конца основного корпуса позволяет эффективную намотку и скручивание тяговых тросов в соответствующие барабаны в обоих направлениях перемещения.
Чтобы заставить геометрию поперечного сечения каждого тягового троса изменяться, как указано, в различных плоскостях вблизи дистального конца основного корпуса, обеспечиваются несколько узлов изменения ориентации тяговых тросов. Каждый узел изменения ориентации содержит блок, прикрепленный к внутренней части удлиненного корпуса, внутри которого выполнены удлиненные каналы, имеющие форму для направления тросов каждого тягового троса с одним поворотом (например, на 90°).
Два узла изменения ориентации используются для каждого тягового троса, что делает возможными упомянутые выше два изменения формы поперечного сечения (от круговой к прямой в первой ориентации, и от прямой в упомянутой первой ориентации в прямую во второй, другой ориентации). Каждый узел изменения ориентации может иметь первый размер (ширина или высота) соответствующий, например, диаметру используемого троса, и второй размер (ширина или высота) соответствующий, например, третьему из упомянутых диаметров. Между двумя узлами изменения ориентации при одной и той же длине тягового троса его тросы помещаются внутрь плоской оболочки, пригодной для подержания его конфигурации.
Для передачи движения посредством перемещения тяговых тросов вдоль удлиненного корпуса используется средство привода, как указано выше, такое как электродвигатели. В одном варианте осуществления изобретения может быть выполнено другое средство с возможностью вращательного привода трубок с внутренней резьбой, которые устанавливаются с сохранением осевого положения внутри основного корпуса. Внутри таких трубок с внутренней резьбой находится трубка с внешней резьбой, которая крепится к внешней оболочке, внутри которой располагаются тяговые тросы. Трубка с внешней резьбой может вращаться в направлении упомянутой трубки с внутренней резьбой (сохраняя осевое направление внутри основного корпуса), так что ее вращение посредством средства привода приводит в результате к продольному движению трубки с внешней резьбой и, следовательно, продольному движению тягового троса первого средства передачи (чтобы приводить в движение пальцы зажимающего средства щипцов) или второго средства передачи (для вращательного привода движущегося корпуса при позиционировании зажимающего средства). Для щипцов, описанных выше, соответствующих изобретению, сборочный узел механически значительно упрощается в отношении щипцов по сравнению с теми, которые для той же самой цели использовались ранее, с последующим снижением затрат. При конфигурации с изменяемой геометрией поперечного сечения тяговых тросов средства привода щипцов для каждого изменения ориентации упомянутой секции возможно, в соответствии с изобретением, обойтись без использования холостых шкивов или механизмов поперечного вращения частей, в которых работают тяговые тросы. Конфигурация изобретения дополнительно позволяет получить очень устойчивый блок с большим сроком службы тросов, а также барабанов, вокруг которых они должны наматываться.
Другие задачи, преимущества и функции минимально инвазивных лапароскопических хирургических щипцов, соответствующих настоящему изобретению, станут очевидными из описания предпочтительного варианта осуществления изобретения. Это описание приводится только для примера и представлено на сопроводительных чертежах.
Краткое описание чертежей
На упомянутых чертежах:
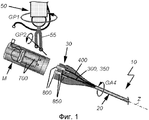
Фиг. 1 - частичный вид в изометрии основного корпуса минимально инвазивных лапароскопических хирургических щипцов, соответствующих настоящему изобретению;
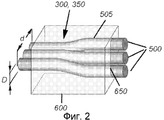
Фиг. 2 - вид в изометрии одного из вариантов осуществления одного модуля изменения ориентации тяговых тросов щипцов;
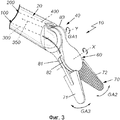
Фиг. 3 - частичный вид в изометрии минимально инвазивных лапароскопических хирургических щипцов, соответствующих настоящему изобретения, с зажимающим средством и вращающимся корпусом, установленными на конце в основном корпусе сборочного узла.
Подробное описание предпочтительного варианта осуществления
На прилагаемых фиг. 1-4 показан предпочтительный вариант осуществления минимально инвазивных лапароскопических хирургических щипцов в роботизированных руках. Щипцы целиком на чертежах указаны ссылочной позицией 10.
В показанном примере варианта осуществления щипцы 10 содержат основной корпус 20 удлиненной формы, имеющий проксимальный конец 30 (левая сторона на чертежах) и дистальный конец 40 (правая сторона на чертежах). Основной корпус 20 щипцов 10 с его проксимальным концом 30 частично показан на фиг. 1. Дистальный конец 40 основного корпуса 20 показан на фиг. 3 и 4.
Как показано на фиг. 1, проксимальный конец 30 корпуса 20 щипцов 10 может присоединяться к роботизированной руке 50 через универсальный шарнир 55. Для ясности, универсальный шарнир 55 показан на упомянутом фиг. 1 отделенным от основного корпуса 20. Универсальный шарнир 55 позволяет сборочному узлу выполнять два пассивных вращения GP1, GP2, как показано на фиг. 1 соответствующими стрелками. На дистальном конце 40 корпуса 20 присоединяется кинематический сборочный узел, содержащий корпус 60, шарнирно установленный на дистальном конце 40. Вращающийся корпус 60 снабжен зажимающим средством (зажим 70), которое далее будет описано более подробно.
Зажим 70 варианта осуществления, показанный для примера на фиг. 3 и 4, содержит два пальца 71, 72 в форме ложки. В варианте осуществления, показанном на фиг. 3, пальцы 71, 72 зажима 70 имеют плоскую, шероховатую внутреннюю поверхность. В варианте осуществления, показанном на фиг. 4, пальцы 71, 72 зажима 70 имеют изогнутую, гладкую внутреннюю поверхность. Следует понимать, однако, что пальцы 71, 72 зажима 70 могут иметь любую другую конфигурацию, так же как внутренняя поверхность по мере необходимости может иметь различную обработку поверхности.
Пальцы 71, 72 зажима 70 могут приводиться в движение путем вращения координированным и независимым способом в соответствии с активными вращательными движениями GA2, GA3, показанными на фиг. 3, вокруг первой оси X для движения в направлении друг друга и/или обратно. Это позволяет щипцам 10 захватывать и даже удерживать любой полезный инструмент, корпус или устройство (не показаны).
Кинематический сборочный узел щипцов 10 может также вращаться вокруг продольной оси Z основного корпуса 20 в соответствии с пассивным угловым движением GA4, показанным на фиг. 1. Это пассивное вращение GA4 выполняется на угол более 360° и позволяет позиционировать рабочую поверхность щипцов 10.
Каждый палец 71, 72 зажима 70 является неотъемлемой частью наматывающего барабана 81, 82, соответственно, который далее будет дополнительно описан подробно.
На проксимальном конце 30 основного корпуса 20 обеспечиваются средства М привода для управляемого привода зажима 70 и его ориентации в пространстве. Средства М привода дополнительно будут описаны ниже более подробно.
В совокупности со средствами М привода первое средство 100 передачи движения обеспечивается для того, чтобы заставить пальцы 71, 72 зажима 70 поворачиваться в направлении друг друга и друг от друга, как показано на фиг. 3 стрелками GA2 и GA3 для каждого из пальцев 71, 72, соответственно. Второе средство 200 передачи движения также обеспечивается для того, чтобы заставить вращающийся корпус 60 поворачиваться по стрелке GA1 вокруг второй оси Y, как показано на фиг. 3, для расположения щипцов 10 боком в пространстве при их использовании во время лапароскопического вмешательства. В одном варианте осуществления предпочтительно первая ось X и вторая ось Y образуют угол 90° друг относительно друга.
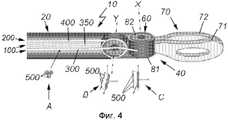
Первое средство 100 передачи содержит тяговые тросы 300, 350 и второе средство передачи содержат один тяговый трос 400, соответственно. Тяговый трос 350 располагается симметрично относительно тягового троса 300 и поэтому он не виден на фиг. 3 (показан пунктирной линией). Ясно, что в других вариантах осуществления изобретения щипцы 70 могут содержать один палец подвижный, другой палец - неподвижный, так что первое средство 100 передачи может в этом случае содержать один тяговый трос (300 или 350).
Все тяговые тросы 300, 350, 400 проходят вдоль основного корпуса 20 от проксимального конца 30 к дистальному концу 40, как можно видеть на фиг. 3 и 4. Тяговые тросы 300, 350, 400 выполнены с возможностью движения по длине внутри основного корпуса 20, чтобы приводить в движение щипцы 10, как подробно будет описано ниже.
В варианте осуществления, показанном для примера, каждый из тяговых тросов 300, 350, 400 средств 100, 200 передачи образуется тремя стальными тросами 500, имеющими круговое поперечное сечение, выполненными с возможностью укладки их внутри оболочки, которая их покрывает (не показана), обеспечивая необходимую жесткость для работы как на растяжение, так и на сжатие.
Несколько компоновок тросов 500 в одном тяговом тросе 300, 350, 400 показаны на фиг 2 и 4. На фиг. 4 показаны различные геометрические компоновки A, B, C поперечного сечения, полученные по меньшей мере для тяговых тросов 300, 350, связанных с первым средством 100 передачи. Это изменение геометрии поперечного сечения тросов 300, 350 определяется компоновкой или ориентацией тросов 500, образующих каждый тяговый трос. В показанном варианте осуществления компоновка тросов 500 в тяговых тросах 300, 350 такова, что вблизи дистального конца 40 основного корпуса 20, тяговые тросы имеют свою геометрию поперечного сечения, изменяющуюся по мере продвижения вперед по длине в направлении дистального конца 40 основного корпуса 20 щипцов 10. Это изменение геометрии поперечного сечения тягового троса 300, 350 позволяет вращательное движение GA2, GA3 пальцев 71, 72 зажима 70 вокруг оси X в обоих направлениях и позволяет тяговым тросам 300, 350, связанным с первым средством 100 движения, проходить через соединение вращающегося корпуса 60, как будет описано ниже.
Изменение геометрии поперечного сечения каждого тягового троса 300, 400 будет описано ниже со ссылкой на фиг. 4. Геометрия поперечного сечения каждого тягового троса 300, 350 изменяется дважды на его пути и, таким образом, существует первая геометрическая компоновка А поперечного сечения тягового троса 300, 350, вторая геометрическая компоновка В поперечного сечения тягового троса 300, 350 и третья геометрическая компоновка C поперечного сечения тягового троса 300, 350. Компоновки A, B и C схематично показаны на фиг. 4. В соответствии с фиг. 4, на большей части длины основного корпуса 20 тяговые тросы 300, 350 проходят с их соответствующими тросами 500, расположенными радиально от проксимального конца 30 к дистальному концу 40. Это радиальное расположение кабелей 500 достигается, по существу, их треугольным расположением, как видно в поперечном сечении, определяя, по существу, круглую форму для первой геометрической компоновки А поперечного сечения тягового троса 300, 350. Вблизи дистального конца 40 основного корпуса 20 геометрия поперечного сечения того же самого тягового троса 300, 350 изменяется с первой компоновки тросов 500 (радиальной), при которой их продольные оси расположены в форме треугольника, на вторую компоновку B, в которой их продольные оси, выровненные в первой ориентации, горизонтально выровнены, как видно на поперечном сечении, таком как показано на фиг. 4. Наконец, геометрия поперечного сечения тягового троса 300, 350 изменяется снова от этой второй компоновки B тросов 500 (в первой ориентации, с горизонтально выровненными продольными осями) на компоновку, в которой упомянутые продольные оси выровнены во второй ориентации, определяя, таким образом, третью геометрическую компоновку C поперечного сечения тягового троса 300, 350, как показано на фиг. 4. Для раскрытого варианта осуществления первая ориентация во второй компоновке B поперечного сечения тягового троса 300, 350 образует угол, по существу, 90° со второй ориентацией третьей компоновки C поперечного сечения тягового троса 300, 350. Поэтому третья компоновка C поперечного сечения тягового троса 300, 350 соответствует той, при которой его тросы 500 располагаются вертикально выровненными, как видно в поперечном сечении, показанном на фиг. 4.
Поперечное сечение тяговых тросов 300, 350 щипцов 10 обеспечивает жесткость, необходимую для работы на растяжение и на сжатие, и одновременно позволяет тяговым тросам накручиваться вокруг каждого барабана 81, 82, 83 соответственно. Изменение в ориентации по меньшей мере тяговых тросов 300, 350 в первом средстве 100 передачи (не обязательно для тягового троса 400, связанного со вторым средством 200 передачи в показанном варианте осуществления) дополнительно позволяет тяговым тросам 300 проходить через соединение 350, связанное с осью Y, чтобы приспосабливаться, то есть, чтобы позволить вращение корпуса 60 в соответствии с направлением вращения GA1.
Как упомянуто выше, первое и второе средства 100, 200 передачи движения, образованные тяговыми тросами 300, 350, 400, дополнительно содержат вращающиеся барабаны 81, 82, 83, вокруг которых накручиваются упомянутые выше соответствующие тяговые тросы 300, 350, 400. В частности, барабаны 81, 82 располагаются коаксиально один над другим, образуя вращающийся корпус 60 щипцов 10, и они выполнены с возможностью приведения во вращательное движение независимо под действием первого средства 100 передачи, то есть тяговым тросом 300 и тяговым тросом 350 (симметричным ему, не виден), соответственно. Тяговый трос 300, проходящий вдоль внутренней части основного корпуса 20, наматывается на периферию барабана 81, тогда как тяговый трос 350, проходящий вдоль внутренней части основного корпуса 20, наматывается на периферию барабана 82. Наконец, тяговый трос 400, также проходящий вдоль внутренней части основного корпуса 20, наматывается на периферию барабана 83. Смещение тяговых тросов 300, 350, связанных с первым средством 100 передачи, вызывает соответствующее независимое вращение соответствующих барабанов 81, 82 вращающегося корпуса 60 щипцов 10, заставляя пальцы 71, 27 зажима 70 поворачиваться независимо вокруг оси X в соответствии с соответствующими активными вращательными перемещениями GA2, GA3, показанными на фиг. 3, вращаясь вокруг оси X в направлении друг друга или друг от друга, как требуется, чтобы захватывать, удерживать и т.д. инструменты, органы и т.д. Перемещение тягового троса 400, связанного со вторым средством 200 передачи, заставляет барабан 83, образующий вращающийся корпус 60 щипцов 10, вращаться вокруг оси Y в соответствии с активным движением GA1, показанным на фиг. 3, для должного позиционирования щипцов 10 в пространстве.
Для необходимого вращательного движения барабанов 81, 82, 83 они снабжаются желобчатой периферией (не показана), пригодной для наматывания соответствующих тяговых тросов 300, 350, 400. Каждый наматывающий барабан 81, 82, определяющий вращающийся корпус 60, неразъемно соединен с каждым соответствующим пальцем 71, 72 зажима 70.
В варианте осуществления минимально инвазивных лапароскопических хирургических щипцов 10, который описывается здесь со ссылкой на чертежи, дополнительно обеспечивается узел 600 изменения ориентации тяговых тросов 300, 350. Один из примеров одного из этих узлов 600 изменения ориентации показан на фиг. 2. На упомянутой фиг. 2 показан узел 600 изменения ориентации тяговых тросов 300, 350, предназначенный для изменения геометрических компоновок A, B, C поперечного сечения каждого тягового троса 300, 350 в упомянутой первом средстве 100 передачи в различных плоскостях вблизи дистального конца 40 основного корпуса 20 щипцов 10. Узел 600 изменения ориентации содержит интегрированный блок, закрепленный внутри основного корпуса 20. Внутри узла 600 изменения ориентации обеспечивается удлиненный внутренний канал 650, имеющий форму, предназначенную для направления тросов 500 каждого тягового троса 300, 350 и принудительного вращения приблизительно на 90° по мере их прохождения через внутреннюю часть канала 650. Для каждого тягового троса 300, 350 первого средства 100 передачи обеспечиваются два узла 600 изменения ориентации. Узлы 600, связанные с упомянутым первым средством 100 передачи движения, то есть те узлы, которые вызывают изменение ориентации тяговых тросов 300 и 350 при движении вдоль длины по основному корпусу 20, располагаются один - на дистальном конце 40 основного корпуса 20, и другой - вблизи одного из соответствующих барабанов 81, 82 вращающегося корпуса 60.
Описанная конфигурация узлов 600 изменения ориентации позволяет производить два изменения в компоновке поперечного сечения тяговых тросов, от круговой А на прямую горизонтальную B и от прямой горизонтальной B окончательно к прямой вертикали C, так схематично показано на фиг. 4 и как описано выше. Внутренний канал 650 каждого узла 600 изменения ориентации может иметь первый размер d, соответствующий диаметру используемого троса (обычно 0,3 мм), и второй размер D, соответствующий трем упомянутым диаметрам (0,9 мм). Должно быть понятно, что упомянутые размеры d, D в конкретной ориентации могут соответствовать ширине и высоте упомянутого канала 650 в показанном примере, хотя геометрия узла 600 может определяться другими размерами.
Между двумя узлами 600 изменения ориентации в одном и том же тяговом тросе 300, 350, тросы 500 помещаются внутри плоской оболочки, пригодной для поддержания их конфигурации на этом пути между двумя узлами 600.
Возвращаясь теперь к фиг. 1, средства М привода тяговых тросов 300, 350, 400 описываются ниже более подробно.
В варианте осуществления, показанном посредством примера, средства М привода содержат несколько электродвигателей 700, выполненных с возможностью привода во вращение внешних трубок 800. Эти внешние трубки 800 снабжены внутренней резьбой и они удерживаются в направлении вдоль оси на проксимальном конце 30 внутри основного корпуса 20, как показано на фиг. 1. Внутрь внешних трубок 800 входят соответствующие внутренние трубки, имеющие наружную резьбу 850 и присоединенные к внешней части соответствующих тяговых тросов 300, 350, 400. Внутренние трубки 850 могут вращаться относительно соответствующих внешних трубок 800, которые, как замечено выше, удерживаются в направлении вдоль оси внутри основного корпуса 20. Таким образом, вращение каждой внешней трубки 800 соответствующим двигателем 700 приводит в результате к продольному движению внутренней трубки 850 и, следовательно, к соответствующему продольному движению тягового троса 300, 350 первого средства 100 передачи для приведения в движение пальцев 71, 72 зажима 70 щипцов 10 вокруг оси X (независимые перемещения GA2, GA3) и/или второго средства 200 передачи для приведения во вращение подвижного корпуса 60 для позиционирования зажима 70 вокруг оси Y (движение GA1).
Хотя настоящее изобретение было представлено в описании и проиллюстрировано сопроводительными чертежами со ссылкой на его предпочтительный вариант осуществления, минимально инвазивные лапароскопические хирургические щипцы, соответствующие изобретению, допускают различные изменения, не отступая от объема защиты, определенного в приложенной формуле изобретения.
Claims (9)
1. Минимально инвазивные лапароскопические хирургические щипцы (10), содержащие зажимающее средство (70), установленное на вращающемся корпусе (60), первое средство (100) передачи движения зажимающего средства (70) и второе средство (200) передачи движения вращающегося корпуса (60), причем упомянутые первое и второе средства (100, 200) передачи соответственно содержат по меньшей мере один тяговый трос (300, 350, 400), каждый из которых образован несколькими тросами (500), которые располагаются так, что поперечное сечение по меньшей мере одного тягового троса (300, 350), связанного с первым средством (100) передачи движения, имеет изменяемую геометрию (А, В, С) вдоль его пути прохода через внутреннюю часть основного корпуса (20), при этом щипцы дополнительно содержат узлы (600) изменения ориентации тросов (500) тягового троса (300, 350), причем каждый узел (600) имеет удлиненный канал (605), форма которого позволяет направлять упомянутые тросы (500) соответствующего тягового троса, вызывая поворот его ориентации; и при этом геометрия поперечного сечения каждого тягового троса (300, 350) имеет первую компоновку (А), в которой соответствующие тросы (500) располагаются так, что в поперечном сечении их продольные оси имеют радиальную компоновку (А), вторую компоновку (В), в которой соответствующие тросы (500) каждого тягового троса (300, 350) расположены так, что в поперечном сечении их продольные оси располагаются в первой ориентации, и третью компоновку (С), в которой соответствующие тросы (500) каждого тягового троса (300, 350) расположены так, что в поперечном сечении их продольные оси располагаются во второй ориентации, отличной от первой ориентации.
2. Щипцы (10) по п.1, в которых упомянутые первая и вторая ориентации второй и третьей компоновок (В, С), соответственно, образуют друг с другом угол, по существу, равный 90°.
3. Щипцы (10) по любому из предшествующих пунктов, в которых по меньшей мере один из упомянутых тяговых тросов (300, 350, 450) образуется по меньшей мере тремя тросами (500).
4. Щипцы (10) по любому из пп.1 и 2, в которых зажимающее средство (70) выполнено с возможностью вращения вокруг первой оси (X).
5. Щипцы (10) по любому из пп.1 и 2, в которых упомянутый вращающийся корпус (60) выполнен с возможностью вращения вокруг второй оси (Y).
6. Щипцы (10) по любому из пп.1 и 2, в которых зажимающее средство выполнено с возможностью вращения вокруг первой оси, при этом вращающийся корпус выполнен с возможностью вращения вокруг второй оси, причем упомянутые первая и вторая оси образуют друг с другом угол, по существу, равный 90°.
7. Щипцы (10) по любому из пп.1 и 2, в которых упомянутый вращающийся корпус (60) содержит вращающиеся барабаны (81, 82), соответственно связанные с упомянутым зажимающим средством (70).
8. Щипцы (10) по п.7, в которых упомянутые вращающиеся барабаны (81, 82) выполнены с возможностью действия независимо, каждый посредством соответствующего тягового троса (300, 350) упомянутого первого средства (100) передачи.
9. Щипцы (10) по пп.1 и 2, дополнительно содержащие по меньшей мере одну оболочку, заключающую внутри тяговые тросы (300, 350, 450).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ES200902132A ES2388867B1 (es) | 2009-10-27 | 2009-10-27 | Pinzas para cirugia laparoscópica mínimamente invasiva. |
| ESP200902132 | 2009-10-27 | ||
| PCT/EP2010/066111 WO2011051253A1 (en) | 2009-10-27 | 2010-10-26 | Minimally invasive laparoscopic surgical pliers |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2012121809A RU2012121809A (ru) | 2013-12-10 |
| RU2551932C2 true RU2551932C2 (ru) | 2015-06-10 |
Family
ID=43466429
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2012121809/14A RU2551932C2 (ru) | 2009-10-27 | 2010-10-26 | Минимально инвазивные лапароскопические хирургические щипцы |
Country Status (14)
| Country | Link |
|---|---|
| US (1) | US9700381B2 (ru) |
| EP (1) | EP2493410B1 (ru) |
| JP (1) | JP5655085B2 (ru) |
| KR (1) | KR101757009B1 (ru) |
| CN (1) | CN102639080B (ru) |
| AU (1) | AU2010311589B2 (ru) |
| BR (1) | BR112012009907B1 (ru) |
| CA (1) | CA2778665C (ru) |
| ES (2) | ES2388867B1 (ru) |
| IL (1) | IL219290A (ru) |
| MX (1) | MX2012004823A (ru) |
| PL (1) | PL2493410T3 (ru) |
| RU (1) | RU2551932C2 (ru) |
| WO (1) | WO2011051253A1 (ru) |
Families Citing this family (219)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| US11998198B2 (en) | 2004-07-28 | 2024-06-04 | Cilag Gmbh International | Surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US20220096112A1 (en) | 2007-01-02 | 2022-03-31 | Aquabeam, Llc | Tissue resection with pressure sensing |
| US9232959B2 (en) | 2007-01-02 | 2016-01-12 | Aquabeam, Llc | Multi fluid tissue resection methods and devices |
| US8840603B2 (en) | 2007-01-10 | 2014-09-23 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8827133B2 (en) | 2007-01-11 | 2014-09-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling device having supports for a flexible drive mechanism |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US11672531B2 (en) | 2007-06-04 | 2023-06-13 | Cilag Gmbh International | Rotary drive systems for surgical instruments |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| RU2493788C2 (ru) | 2008-02-14 | 2013-09-27 | Этикон Эндо-Серджери, Инк. | Хирургический режущий и крепежный инструмент, имеющий радиочастотные электроды |
| US9585657B2 (en) | 2008-02-15 | 2017-03-07 | Ethicon Endo-Surgery, Llc | Actuator for releasing a layer of material from a surgical end effector |
| EP2259742B1 (en) | 2008-03-06 | 2020-01-01 | AquaBeam LLC | Tissue ablation and cautery with optical energy carried in fluid stream |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US8740038B2 (en) | 2010-09-30 | 2014-06-03 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising a releasable portion |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US9788834B2 (en) | 2010-09-30 | 2017-10-17 | Ethicon Llc | Layer comprising deployable attachment members |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| CA2834649C (en) | 2011-04-29 | 2021-02-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US20130066332A1 (en) * | 2011-09-09 | 2013-03-14 | Garnette Sutherland | Surgical Tool for Use in MR Imaging |
| BR112014021482B1 (pt) | 2012-02-29 | 2021-12-21 | Procept Biorobotics Corporation | Aparelho de ressecção de próstata |
| RU2014143258A (ru) | 2012-03-28 | 2016-05-20 | Этикон Эндо-Серджери, Инк. | Компенсатор толщины ткани, содержащий множество слоев |
| CN104334098B (zh) | 2012-03-28 | 2017-03-22 | 伊西康内外科公司 | 包括限定低压强环境的胶囊剂的组织厚度补偿件 |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US10492876B2 (en) | 2012-09-17 | 2019-12-03 | Omniguide, Inc. | Devices and methods for laser surgery |
| US10231867B2 (en) | 2013-01-18 | 2019-03-19 | Auris Health, Inc. | Method, apparatus and system for a water jet |
| MX368026B (es) | 2013-03-01 | 2019-09-12 | Ethicon Endo Surgery Inc | Instrumento quirúrgico articulable con vías conductoras para la comunicación de la señal. |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US10744035B2 (en) | 2013-06-11 | 2020-08-18 | Auris Health, Inc. | Methods for robotic assisted cataract surgery |
| KR101480772B1 (ko) * | 2013-07-04 | 2015-01-14 | 전자부품연구원 | 링크구동형 2자유도 구동 장치 |
| US10426661B2 (en) | 2013-08-13 | 2019-10-01 | Auris Health, Inc. | Method and apparatus for laser assisted cataract surgery |
| US20150053737A1 (en) | 2013-08-23 | 2015-02-26 | Ethicon Endo-Surgery, Inc. | End effector detection systems for surgical instruments |
| JP6261612B2 (ja) | 2013-12-20 | 2018-01-17 | オリンパス株式会社 | 軟性マニピュレータ用ガイド部材および軟性マニピュレータ |
| SG11201607930TA (en) * | 2014-03-19 | 2016-12-29 | Endomaster Pte Ltd | Master - slave flexible robotic endoscopy system |
| US10013049B2 (en) | 2014-03-26 | 2018-07-03 | Ethicon Llc | Power management through sleep options of segmented circuit and wake up control |
| US10327764B2 (en) | 2014-09-26 | 2019-06-25 | Ethicon Llc | Method for creating a flexible staple line |
| CN106456158B (zh) | 2014-04-16 | 2019-02-05 | 伊西康内外科有限责任公司 | 包括非一致紧固件的紧固件仓 |
| BR112016023698B1 (pt) | 2014-04-16 | 2022-07-26 | Ethicon Endo-Surgery, Llc | Cartucho de prendedores para uso com um instrumento cirúrgico |
| US20150297223A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| CN106456159B (zh) | 2014-04-16 | 2019-03-08 | 伊西康内外科有限责任公司 | 紧固件仓组件和钉保持器盖布置结构 |
| US9757128B2 (en) | 2014-09-05 | 2017-09-12 | Ethicon Llc | Multiple sensors with one sensor affecting a second sensor's output or interpretation |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| BR112017012996B1 (pt) | 2014-12-18 | 2022-11-08 | Ethicon Llc | Instrumento cirúrgico com uma bigorna que é seletivamente móvel sobre um eixo geométrico imóvel distinto em relação a um cartucho de grampos |
| US9943309B2 (en) | 2014-12-18 | 2018-04-17 | Ethicon Llc | Surgical instruments with articulatable end effectors and movable firing beam support arrangements |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| CN104706417B (zh) * | 2015-02-03 | 2017-05-10 | 首都医科大学附属北京友谊医院 | 磁固定悬挂式单孔腹腔镜手术机器人系统 |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US10390825B2 (en) | 2015-03-31 | 2019-08-27 | Ethicon Llc | Surgical instrument with progressive rotary drive systems |
| US20160287279A1 (en) | 2015-04-01 | 2016-10-06 | Auris Surgical Robotics, Inc. | Microsurgical tool for robotic applications |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10433846B2 (en) | 2015-09-30 | 2019-10-08 | Ethicon Llc | Compressible adjunct with crossing spacer fibers |
| ITUB20154977A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Strumento medicale e metodo di fabbricazione di detto strumento medicale |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US10231793B2 (en) | 2015-10-30 | 2019-03-19 | Auris Health, Inc. | Object removal through a percutaneous suction tube |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10736629B2 (en) | 2016-12-21 | 2020-08-11 | Ethicon Llc | Surgical tool assemblies with clutching arrangements for shifting between closure systems with closure stroke reduction features and articulation and firing systems |
| US11090048B2 (en) | 2016-12-21 | 2021-08-17 | Cilag Gmbh International | Method for resetting a fuse of a surgical instrument shaft |
| US10588632B2 (en) | 2016-12-21 | 2020-03-17 | Ethicon Llc | Surgical end effectors and firing members thereof |
| US10758230B2 (en) | 2016-12-21 | 2020-09-01 | Ethicon Llc | Surgical instrument with primary and safety processors |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| EP3348213A1 (en) * | 2017-01-13 | 2018-07-18 | Spinal Stabilization Technologies Ltd | Articulating surgical instruments such as rongeurs |
| AU2018244318B2 (en) | 2017-03-28 | 2023-11-16 | Auris Health, Inc. | Shaft actuating handle |
| US10987174B2 (en) | 2017-04-07 | 2021-04-27 | Auris Health, Inc. | Patient introducer alignment |
| US10285574B2 (en) | 2017-04-07 | 2019-05-14 | Auris Health, Inc. | Superelastic medical instrument |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US11678880B2 (en) | 2017-06-28 | 2023-06-20 | Cilag Gmbh International | Surgical instrument comprising a shaft including a housing arrangement |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| CN117860345A (zh) | 2017-11-13 | 2024-04-12 | 维卡瑞斯外科手术股份有限公司 | 虚拟现实腕部组件 |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| US20190192147A1 (en) | 2017-12-21 | 2019-06-27 | Ethicon Llc | Surgical instrument comprising an articulatable distal head |
| KR102579505B1 (ko) | 2018-06-07 | 2023-09-20 | 아우리스 헬스, 인코포레이티드 | 고출력 기구를 가진 로봇 의료 시스템 |
| CN112367928A (zh) | 2018-06-28 | 2021-02-12 | 奥瑞斯健康公司 | 结合滑轮共享的医疗系统 |
| EP3806772A4 (en) | 2018-08-15 | 2022-03-30 | Auris Health, Inc. | MEDICAL INSTRUMENTS FOR TISSUE CAUTERIZATION |
| CN112566567A (zh) | 2018-08-17 | 2021-03-26 | 奥瑞斯健康公司 | 双极医疗器械 |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US11864849B2 (en) | 2018-09-26 | 2024-01-09 | Auris Health, Inc. | Systems and instruments for suction and irrigation |
| WO2020076447A1 (en) | 2018-10-08 | 2020-04-16 | Auris Health, Inc. | Systems and instruments for tissue sealing |
| US11950863B2 (en) | 2018-12-20 | 2024-04-09 | Auris Health, Inc | Shielding for wristed instruments |
| CN113347938A (zh) | 2019-01-25 | 2021-09-03 | 奥瑞斯健康公司 | 具有加热和冷却能力的血管密封器 |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11534248B2 (en) | 2019-03-25 | 2022-12-27 | Auris Health, Inc. | Systems and methods for medical stapling |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11369386B2 (en) | 2019-06-27 | 2022-06-28 | Auris Health, Inc. | Systems and methods for a medical clip applier |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| WO2020263949A1 (en) | 2019-06-28 | 2020-12-30 | Auris Health, Inc. | Medical instruments including wrists with hybrid redirect surfaces |
| US11241235B2 (en) | 2019-06-28 | 2022-02-08 | Cilag Gmbh International | Method of using multiple RFID chips with a surgical assembly |
| US12004740B2 (en) | 2019-06-28 | 2024-06-11 | Cilag Gmbh International | Surgical stapling system having an information decryption protocol |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| US10959792B1 (en) | 2019-09-26 | 2021-03-30 | Auris Health, Inc. | Systems and methods for collision detection and avoidance |
| US11737845B2 (en) | 2019-09-30 | 2023-08-29 | Auris Inc. | Medical instrument with a capstan |
| US11737835B2 (en) | 2019-10-29 | 2023-08-29 | Auris Health, Inc. | Braid-reinforced insulation sheath |
| US12035913B2 (en) | 2019-12-19 | 2024-07-16 | Cilag Gmbh International | Staple cartridge comprising a deployable knife |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| CN114901188A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 动态滑轮系统 |
| CN114901200A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 高级篮式驱动模式 |
| EP3900884B1 (en) * | 2020-04-20 | 2022-08-10 | C.R.F. Società Consortile per Azioni | A gripping device for handling items or components of different shape and size |
| WO2022003485A1 (en) | 2020-06-29 | 2022-01-06 | Auris Health, Inc. | Systems and methods for detecting contact between a link and an external object |
| US11357586B2 (en) | 2020-06-30 | 2022-06-14 | Auris Health, Inc. | Systems and methods for saturated robotic movement |
| US11931901B2 (en) | 2020-06-30 | 2024-03-19 | Auris Health, Inc. | Robotic medical system with collision proximity indicators |
| US20220031350A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Surgical instruments with double pivot articulation joint arrangements |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US12053175B2 (en) | 2020-10-29 | 2024-08-06 | Cilag Gmbh International | Surgical instrument comprising a stowed closure actuator stop |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| CN112716566B (zh) * | 2020-12-25 | 2024-09-24 | 昆明医科大学第二附属医院 | 一种可调整角度的分离钳 |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US12108951B2 (en) | 2021-02-26 | 2024-10-08 | Cilag Gmbh International | Staple cartridge comprising a sensing array and a temperature control system |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US12102323B2 (en) | 2021-03-24 | 2024-10-01 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising a floatable component |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11944336B2 (en) * | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11998201B2 (en) | 2021-05-28 | 2024-06-04 | Cilag CmbH International | Stapling instrument comprising a firing lockout |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US12089841B2 (en) | 2021-10-28 | 2024-09-17 | Cilag CmbH International | Staple cartridge identification systems |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4880015A (en) * | 1988-06-03 | 1989-11-14 | Nierman David M | Biopsy forceps |
| RU2098025C1 (ru) * | 1993-10-11 | 1997-12-10 | Аркадий Вениаминович Дубровский | Поворотное устройство |
| US6969385B2 (en) * | 2002-05-01 | 2005-11-29 | Manuel Ricardo Moreyra | Wrist with decoupled motion transmission |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001321385A (ja) | 2000-05-16 | 2001-11-20 | Asahi Optical Co Ltd | 内視鏡用鉗子 |
| US7766894B2 (en) * | 2001-02-15 | 2010-08-03 | Hansen Medical, Inc. | Coaxial catheter system |
| US7699835B2 (en) * | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| US20030135204A1 (en) * | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| JP3912251B2 (ja) * | 2002-10-02 | 2007-05-09 | 株式会社日立製作所 | マニピュレータ |
| EP1575439B1 (en) * | 2002-12-06 | 2012-04-04 | Intuitive Surgical, Inc. | Flexible wrist for surgical tool |
| DE10324844A1 (de) | 2003-04-01 | 2004-12-23 | Tuebingen Scientific Surgical Products Gmbh | Chirurgisches Instrument mit Instrumentengriff und Nullpunkteinstellung |
| US7410483B2 (en) * | 2003-05-23 | 2008-08-12 | Novare Surgical Systems, Inc. | Hand-actuated device for remote manipulation of a grasping tool |
| US7090637B2 (en) * | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| ITPI20030107A1 (it) * | 2003-11-14 | 2005-05-15 | Massimo Bergamasco | Dispositivo per l'esecuzione di operazioni |
| US20070208375A1 (en) * | 2006-02-23 | 2007-09-06 | Kouji Nishizawa | Surgical device |
| US8758333B2 (en) * | 2006-04-04 | 2014-06-24 | The Spectranetics Corporation | Laser-assisted guidewire having a variable stiffness shaft |
| KR101477125B1 (ko) * | 2006-06-13 | 2014-12-29 | 인튜어티브 서지컬 인코포레이티드 | 미소절개 수술 시스템 |
| KR100778387B1 (ko) | 2006-12-26 | 2007-11-28 | 한국과학기술원 | 다자유도를 갖는 복강경 수술용 로봇 및 그의 힘 측정방법 |
| US20090062602A1 (en) * | 2007-07-30 | 2009-03-05 | Hansen Medical, Inc. | Apparatus for robotic instrument having variable flexibility and torque transmission |
| JP2009050288A (ja) * | 2007-08-23 | 2009-03-12 | Terumo Corp | 医療用マニピュレータの作業機構 |
| JP5364255B2 (ja) * | 2007-10-31 | 2013-12-11 | テルモ株式会社 | 医療用マニピュレータ |
| JP5258284B2 (ja) * | 2007-12-28 | 2013-08-07 | テルモ株式会社 | 医療用マニピュレータ及び医療用ロボットシステム |
-
2009
- 2009-10-27 ES ES200902132A patent/ES2388867B1/es active Active
-
2010
- 2010-10-26 KR KR1020127013301A patent/KR101757009B1/ko active IP Right Grant
- 2010-10-26 EP EP10770816.6A patent/EP2493410B1/en active Active
- 2010-10-26 ES ES10770816.6T patent/ES2640287T3/es active Active
- 2010-10-26 JP JP2012535780A patent/JP5655085B2/ja active Active
- 2010-10-26 WO PCT/EP2010/066111 patent/WO2011051253A1/en active Application Filing
- 2010-10-26 MX MX2012004823A patent/MX2012004823A/es active IP Right Grant
- 2010-10-26 RU RU2012121809/14A patent/RU2551932C2/ru active
- 2010-10-26 CN CN201080054312.0A patent/CN102639080B/zh active Active
- 2010-10-26 BR BR112012009907A patent/BR112012009907B1/pt active IP Right Grant
- 2010-10-26 PL PL10770816T patent/PL2493410T3/pl unknown
- 2010-10-26 US US13/504,477 patent/US9700381B2/en active Active
- 2010-10-26 CA CA2778665A patent/CA2778665C/en active Active
- 2010-10-26 AU AU2010311589A patent/AU2010311589B2/en active Active
-
2012
- 2012-04-19 IL IL219290A patent/IL219290A/en active IP Right Grant
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4880015A (en) * | 1988-06-03 | 1989-11-14 | Nierman David M | Biopsy forceps |
| RU2098025C1 (ru) * | 1993-10-11 | 1997-12-10 | Аркадий Вениаминович Дубровский | Поворотное устройство |
| US6969385B2 (en) * | 2002-05-01 | 2005-11-29 | Manuel Ricardo Moreyra | Wrist with decoupled motion transmission |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2493410B1 (en) | 2017-06-28 |
| EP2493410A1 (en) | 2012-09-05 |
| AU2010311589A1 (en) | 2012-06-14 |
| CN102639080A (zh) | 2012-08-15 |
| US9700381B2 (en) | 2017-07-11 |
| MX2012004823A (es) | 2012-06-12 |
| WO2011051253A1 (en) | 2011-05-05 |
| CA2778665A1 (en) | 2011-05-05 |
| ES2388867A1 (es) | 2012-10-19 |
| JP5655085B2 (ja) | 2015-01-14 |
| BR112012009907A2 (pt) | 2016-03-08 |
| KR20120098744A (ko) | 2012-09-05 |
| AU2010311589B2 (en) | 2013-12-19 |
| ES2640287T3 (es) | 2017-11-02 |
| IL219290A0 (en) | 2012-06-28 |
| IL219290A (en) | 2016-07-31 |
| BR112012009907B1 (pt) | 2020-01-21 |
| CN102639080B (zh) | 2014-11-12 |
| US20120209315A1 (en) | 2012-08-16 |
| ES2388867B1 (es) | 2013-09-18 |
| CA2778665C (en) | 2017-12-05 |
| JP2013508107A (ja) | 2013-03-07 |
| KR101757009B1 (ko) | 2017-07-26 |
| RU2012121809A (ru) | 2013-12-10 |
| PL2493410T3 (pl) | 2017-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2551932C2 (ru) | Минимально инвазивные лапароскопические хирургические щипцы | |
| AU2022259747B2 (en) | Pulley arrangement and pulley guard for articulating a surgical instrument | |
| KR102543919B1 (ko) | 다중 케이블 의료 기기 | |
| US10881475B2 (en) | Surgical robot | |
| US11071600B2 (en) | Medical treatment tool and surgical system | |
| WO2015012044A1 (ja) | 治療用マニピュレータおよびマニピュレータシステム | |
| US20190159852A1 (en) | Surgical tool, medical treatment instrument, and surgical system | |
| KR102032379B1 (ko) | 선회장치 및 의료기기 | |
| US20200237463A1 (en) | Surgical instrument | |
| KR101301506B1 (ko) | 복강경 수술 로봇의 2자유도 구동 장치 및 그 가이드 장치 | |
| US12035990B2 (en) | Endoscopic surgery robot | |
| RU2828362C2 (ru) | Заднее передаточное устройство и медицинское устройство | |
| KR101215839B1 (ko) | 수술용 인스트루먼트 | |
| US20230372041A1 (en) | Surgical instrument, slave operating device, and surgical robot | |
| CN116965862A (zh) | 平行运动机构、手术器械和手术机器人 | |
| JP2020073013A (ja) | 手術用システムおよび医療用処置具 | |
| GB2604569A (en) | Pulley arrangement and pulley guard for articulating a surgical instrument |