RU2501039C2 - Устройство и способ контроля целостности в реальном времени спутниковой навигационной системы - Google Patents
Устройство и способ контроля целостности в реальном времени спутниковой навигационной системы Download PDFInfo
- Publication number
- RU2501039C2 RU2501039C2 RU2010141534/07A RU2010141534A RU2501039C2 RU 2501039 C2 RU2501039 C2 RU 2501039C2 RU 2010141534/07 A RU2010141534/07 A RU 2010141534/07A RU 2010141534 A RU2010141534 A RU 2010141534A RU 2501039 C2 RU2501039 C2 RU 2501039C2
- Authority
- RU
- Russia
- Prior art keywords
- distribution
- integrity
- errors
- calculation
- low probability
- Prior art date
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/03—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers
- G01S19/08—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing integrity information, e.g. health of satellites or quality of ephemeris data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/20—Integrity monitoring, fault detection or fault isolation of space segment
Abstract
Изобретение относится к области радиотехники, а именно к спутниковым навигационным системам, и может быть использовано для предоставления средства оценки индикации целостности (11) спутниковой навигационной системы. Технический результат заключается в решении проблемы оценки запаса целостности спутниковой навигационной системы для событий выхода из строя очень низкой вероятности, ниже или равной приблизительно 10-7. Для этого, чтобы оценить индикацию целостности (11) системы относительно погрешностей определения местоположения (2), которые должны быть очень низкой вероятности, ниже или равной приблизительно 10-7, реализуют в реальном времени этапы: измерения данных, рассчитанных системой; расчета модели распределения Н погрешностей расчета определения местоположения (2) системы; определения параметров, характеризующих модель распределения (H); моделирования в области вероятностей хвоста распределения H(x) вычислительным средством в зависимости от упомянутых параметров, применяемых в теории экстремальных чисел; сравнения в реальном времени распределения погрешностей определения местоположения с порогом допуска, позволяющим представить индикацию целостности; и передачи в реальном времени индикации целостности (11) системы. 2 н. и 5 з.п. ф-лы, 3 ил.
Description
Область изобретения относится к спутниковым навигационным системам, а более конкретно к области техники, предоставляющей пользователю средства доверия к информации о коррекции ошибки, поступающей от спутниковой системы.
Под термином “спутниковая навигационная система” подразумевается в настоящем описании любая система, обеспечивающая навигацию в широкой зоне, например, такая, как существующие системы GNSS (“Глобальная навигационная спутниковая система”), носящие название GPS, ГЛОНАСС или создаваемая система GALILEO, а также и все эквивалентные им и построенные на их базе.
Специалистам хорошо известен принцип определения местоположения спутниковых навигационных систем. Так, например, в системе GPS, сигнал радиочастоты, испускаемый спутником, кодируется и время, необходимое этому сигналу для достижения им приемника, местоположение которого необходимо определить, используется для определения расстояния между указанным спутником и этим приемником, предпочтительно называемого псевдо-расстоянием.
Для улучшения существующих спутниковых систем относительно точности, целостности, непрерывности, а также их эксплуатационной готовности, используются так называемые вспомогательные системы. Характеристика целостности имеет особое значение, так как она определяет собой работу систем, от которых зависит безопасность пользователей. Европейская вспомогательная спутниковая система EGNOS улучшает характеристику двух спутниковых систем GPS и GLONASS. Она передает пользователю сообщения целостности, которые позволяют ему оценить насколько он может доверять координатам своего местоположения и в итоге позволяют ему принять соответствующее решение. Система EGNOS передает, в виде стандартных отклонений, корректировки псевдо-расстояний и их уточнения и корректирует:
- погрешности, связанные с прохождением в ионосфере и тропосфере электромагнитных волн;
- погрешности, связанные с спутниками GPS и геостационарными спутниками (медленные корректировки: орбитальные погрешности и часовые погрешности);
- быстро изменяющиеся погрешности, такие как часовые, обусловленные селективным доступом -Selective Availability SA-(быстрые корректировки).
Можно привести в качестве рассчитанных данных по погрешностям в определении псевдо-расстояния данные, именуемые по-английски сокращенно SREW: “Satellite residual Error for the Worst User Location”. Эти данные представляют собой орбитальную и часовую погрешности спутника для наименее благополучного пользователя в зоне обслуживания. Данные, именуемые по-английски сокращенно UDRE ("User Differential Range Error") представляют собой мажорантную оценку данных SREW. Можно привести также ионосферные погрешности, именуемые по-английски сокращенно GIVD “Grid Ionospheric Vertical Delay”. Ионосферный слой был поделен посредством сетки на отдельные участки. Для каждой точки указанной сетки, передается оценка соответствующей ей ионосферной задержки. Пользователь, измерение которого маловероятно определить точно в указанной точке сетки, должен произвести интерполяцию величин, предоставляемых ему для каждой из 4 точек сетки, соседних по отношению к точке, в которой было определено местоположение пользователя. В то же время пользователь не обязательно увидит спутник вертикально, но, скорее всего, это будет наклонный замер.
Продолжают действовать только те источники погрешностей, которые связаны с приемником (часовая погрешность, эксцентриситет, многочисленные маршруты). Пользователь рассчитывает затем свое «вспомогательное» положение то есть, то положение, которое улучшено в результате корректировок псевдо-расстояния. Точность этого положения оценивается путем его сравнения с опорным положением. Корректировки псевдо-расстояния позволяют пользователю рассчитывать в реальном времени точность своего положения, посредством распространения погрешности. В гражданской авиации устанавливают, например, исходя из точности положения, уровни защиты. Эти уровни представляют собой интервалы строгого доверия. Указанные уровни защиты не должны превышать аварийного уровня, предусмотренного для фазы полета. Целостность, эксплуатационная готовность и непрерывность действия навигационной системы оцениваются по погрешности положения, уровням защиты и уровням тревоги.
На фиг. 1 показаны структура спутниковой навигационной системы, содержащей систему GNSS дифференциального позиционирования и вспомогательные системы SBAS (“Satellite Based Augmentation System”) и GBAS (“Ground Based Augmentation System”). Летательные аппараты имеют на борту приемники, связанные со вспомогательными системами.
EGNOS представляет собой систему типа SBAS, содержащую наземную инфраструктуру SBAS G и геостационарные спутники SBAS S. Наземная инфраструктура включает в себя большое число наземных приемных станций, распределенных в широкой географической зоне, которые получают данные от спутников GNSS и определяют псевдо-расстояния, а также центральную станцию 1 контроля и обработки, которая на основании псевдо-расстояний, переданных приемными станциями SBAS G, определяет корректировки и целостность, которые сгруппированы в сигнале SBAS. Геостационарные спутники транслируют этот сигнал от центральной станции к приемникам летательных аппаратов.
Система GBAS содержит наземные радиомаяки, предназначенные для удовлетворения местных потребностей, в том случае, если необходима более высокая точность определения в заданном радиусе действия. Указанные наземные радиомаяки расположены, например, в зонах аэропорта. Система GBAS содержит также приемники, устанавливаемые на борту летательных аппаратов. Система GNSS выдает летательным аппаратам и наземным радиомаякам информацию для расчета псевдо-расстояний. Наземный радиомаяк выдает для каждого спутника GNSS, находящегося в зоне видимости, информацию о корректировке псевдо-расстояний и информацию о целостности дифференциального позиционирования. Радиомаяки GBAS выдают более точные корректировки по сравнению с корректировками центральной станции SBAS. Кроме того, радиомаяки GBAS находятся под контролем службы воздушного контроля, которая может, таким образом, контролировать передачу указанными радиомаяками в соответствии с требующимися целостностью и точностью положения.
Известно большое число способов выявления нарушения целостности спутниковых систем, но, ни один из них не способен предоставить индикацию целостности системы в реальном времени для событий очень низкой вероятности, то есть, вероятности порядка 10-7. В качестве примера можно привести патент US 7,089,452 B2, в котором описана техника оценки целостности спутниковой системы GPS, основанной на применении средства оценки, использующего технику моментов. Современные технологии способны лишь определять, соблюдают или нет спутниковые системы условия сертификации. Они выполняют лишь апостериори контроль уровня целостности системы. Основным недостатком этого типа решения является то, что оператор имеет возможность только дезактивировать систему, как только будет пройден определенный критический порог. Эти технологии не позволяют контролировать эволюцию состояния целостности спутниковой навигационной системы и в итоге предвидеть аварийную ситуацию.
Известно, что спутниковые системы, работающие со вспомогательными системами, способны отвечать техническим требованиям для событий очень низкой вероятности. Эти проверки проводились на стадии разработки с применением трудоемких и монотонных способов. Причем на стадии применения систем было уже невозможно вновь провести эти проверки. При использовании современных технологий для выполнения этих проверок потребуется провести измерения, продолжительность тестирования которых будет стремиться к бесконечности. В самом деле, при выполнении измерений запасов целостности методами классической инферентной статистики, последняя пытается смоделировать поведение случайной переменной в доступной наблюдению области реализаций. Для получения релевантной статистики необходимо получить достаточно декоррелированные данные с тем, чтобы не производить измерение излишней информации. Считаем, что необходимо выполнять дискретизацию с интервалом, равным приблизительно 5 минутам между каждым измерением. А принимая во внимание низкую вероятность событий, которые необходимо обнаружить, это потребует собрать миллиарды образцов на протяжении тысяч лет измерений.
Кроме того, спутниковые системы были сертифицированы на уровне целостности, соответствующем 10-7, для передачи информации в комплекс спутниковой системы и в отдельную систему. Современные технологии не позволяют производить измерение целостности на уровне 10-7 для всего комплекса жизненного цикла спутниковой системы и не учитывают влияние возмущающих факторов, сопутствующих каждому определению местоположения.
Изобретение имеет, таким образом, целью улучшить технологию контроля навигационных систем для индикаций целостности относительно событий очень низкой вероятности с тем, чтобы лучше проводить оценку запаса целостности в соответствии со строгими техническими требованиями и в частности в случае систем, применяющихся в авиационной промышленности.
Более конкретно изобретение относится к вычислительному устройству, предоставляющему средства оценки индикации целостности спутниковой навигационной системы, отличающемуся тем, что оно содержит средства оценки в реальном времени, путем измерения данных, рассчитанных навигационной системой, индикации целостности системы относительно погрешностей определения местоположения очень низкой вероятности, причем указанные средства содержат:
- средство приема данных, рассчитанных системой определения местоположения,
- средство оценки модели распределения погрешностей определения местоположения,
- средство оценки параметров, характеризующих модель распределения,
- вычислительное средство, применяющее теорию экстремальных величин в зависимости от параметров, характеризующих модель распределения, позволяющее смоделировать распределение погрешностей определения местоположения очень низкой вероятности,
-средство оценки в реальном времени индикации целостности для погрешностей определения местоположения очень низкой вероятности,
- средство передачи в реальном времени индикации целостности.
Изобретение дает решение проблемы оценки запаса целостности спутниковой навигационной системы для событий выхода из строя очень низкой вероятности. Изобретение предлагает подход, отличный от решений, основанных на использовании инферентных статистических методов, ввиду того, что с их помощью нельзя выдавать индикацию в реальном времени о событиях низкой вероятности. Под термином «событие низкой вероятности» понимаются погрешности положения, вероятность появления которых должна быть ниже 10-7 для периода, продолжительностью в 150 секунд. Анализ экстремальных событий значительно отличается от классической инферентной статистики уже в силу самой природы изучаемых переменных. В самом деле, последняя пытается предсказать поведение “в хвосте распределения”. Распределение же экстремальных величин происходит, как известно, асимптотически и аппроксимация с помощью асимптотического закона представляется эффективной. Используя распределение элементов в наблюдаемой области, можно смоделировать в реальном времени распределение элементов хвоста, принадлежащих области очень низкой вероятности появления, и квалифицировать таким образом запас целостности. Изобретение предоставляет средство оценки в реальном времени эволюции характеристик спутниковой навигационной системы. Таким образом, имеется возможность предсказать ухудшение характеристик системы и в конечном результате предвосхитить случаи выхода из строя.
Изобретение и другие его преимущества можно будет лучше понять после ознакомления с нижеследующим описанием, не носящем ограничительного характера, приведенным с приложением фигур, среди которых:
На фиг. 1 представлена структура спутниковой навигационной системы со вспомогательной системой. На ней показаны два типа вспомогательных систем предоставляющих индикации целостности спутниковой навигационной системы: космический сегмент типа SBAS, как, например, EGNOS, и наземный сегмент типа GBAS.
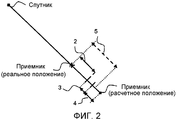
На фиг. 2 представлен принцип определения информации о целостности спутниковой навигационной системы, использующей в качестве исходных данных данные псевдо-расстояния.
На фиг. 3 представлено распределение остаточных погрешностей, наблюдаемых в расчетах положения спутниковой навигационной системы. Хвост распределения представляет остаточные погрешности очень низкой вероятности и он смоделирован путем применения теории экстремальных величин к оцениваемой модели распределения.
Изобретение, как это показано на фиг. 1, относится к счетным устройствам, предоставляющим индикации целостности спутниковой навигационной системы. Изобретение предназначено, в частности, для наземной станции расчета типа GBAS спутниковой навигационной системы, снабженной вспомогательной системой, которая в частности применяется в аэропортах, но может применяться и на станциях контроля и обработки вспомогательных систем типа SBAS.
Станция расчета целостности навигационной системы содержит средство измерения остаточной погрешности положения, рассчитанной навигационной системой. Исходные данные для выполнения расчета индикации целостности могут поступать:
- из области положений, использующей погрешности положений, нормализованных радиусом уровней защиты;
- из области псевдо-расстояний, использующей корректировки погрешности, рассчитанные центральной станцией контроля и обработки.
На фиг. 2 схематически представлен принцип определения величины погрешности положения. В качестве примера, не носящего ограничительного характера, станция расчета целостности согласно изобретению содержит приемники радиочастотных сигналов дифференциального позиционирования спутниковой системы, причем указанные приемники определяют расчетное положение станции. Станция расчета содержит также приемник, в который поступает величина корректировок 3 и 4, что позволяет определить, таким образом, величину скорректированного положения станции. Станция расчета содержит также средство хранения, хранящее величину реального положения станции расчета, величину, определенную техническими геодезическими средствами. Вычислитель рассчитывает, таким образом, разницу между реальным и расчетным положением станции. Указанная разница 2 носит название “остатка” и позволяет определить целостность навигационной системы. Пороговая величина целостности 5 определена и вероятность того, что эта пороговая величина целостности 5 окажется ниже остатка 2 должна быть ниже уровня 10-7.
Станция расчета, согласно изобретению, содержит вычислительное средство, позволяющее оценить распределение остатков, измеренных в реальном времени. На основании указанного распределения получают параметры, которые затем используются вычислительным средством для применения теории экстремальных величин. В качестве примера, не носящего ограничительного характера, как это показано на фиг. 3, используется модель распределения в виде гауссового распределения. Изобретение не ограничивается исключительно этим средством оценки и в различных адаптированных способах применения изобретения могут использоваться и другие средства оценки. Специалистам в рассматриваемой области техники известны средства оценки типа Pickands, методика максимума правдоподобия или метод моментов. Параметры, используемые впоследствии для применения теории экстремальных величин, зависят от конкретной используемой модели распределения.
Изобретение относится также к способу, позволяющему оценить индикацию целостности навигационной системы, отличающемуся тем, что в нем используется устройство, согласно изобретению, для выполнения следующих этапов в реальном времени, чтобы оценить индикацию целостности системы относительно погрешностей определения местоположения х, которые должны быть очень низкой вероятности:
- измерение данных x, рассчитанных системой определения местоположения,
- расчет модели распределения H погрешностей расчета определения местоположения x системы,
- определение параметров (a, b, c) , характеризующих модель распределения H, где “a” - параметр, определяющий самую вероятную величину распределения , “b” - параметр, указывающий на разброс экстремальных значений, а “с” - параметр, указывающий на значимость экстремальных значений в распределении,
- моделирование в области вероятностей хвоста распределения H(x) вычислительным средством в зависимости от параметров (a, b, c), применяемых в теории экстремальных величин следующим образом:

- сравнение в реальном времени распределения погрешностей определения местоположения с порогом допуска 22 , позволяющего выдавать индикацию целостности,
- передача в реальном времени индикации целостности 11 системы определения местоположения.
Надежность моделирования хвоста распределения зависит от параметров a, b и c. Указанные параметры поступают от средства оценки, определяющего модель распределения исходных данных, где “x” - представляет собой исходные данные и соответствует измерениям погрешности определения местоположения. Параметр “a” представляет собой параметр определения местоположения и он непосредственно связан с самой вероятной величиной закона; он указывает, таким образом, приблизительно где находится центр распределения. Параметр “b” представляет собой - параметр разброса; он указывает разброс экстремальных значений. Параметр “c” носит название показателя разброса. Чем больше этот показатель по своей абсолютной величине, тем выше значимость экстремальных значений в первоначальном распределении. Указанный параметр представляет собой основной индикатор поведения хвоста распределения, и когда:
-c>0: область соответствует распределению Фреше, то есть распределению неограниченных значений x и затуханию типа полиномиального;
- c=0: область соответствует распределению Гамбела, то есть, распределению x , представляющему затухание типа по экспоненте в хвосте распределения;
- c<0: область соответствует распределению Вейбулла, то есть, распределению ограниченных значений x.
Согласно первому способу реализации изобретения измеряют погрешности положения по отношению к опорному положению для того, чтобы рассчитать модель распределения погрешностей расчета определения местоположения системы.
Согласно второму способу реализации изобретения, измеряют погрешности псевдо-расстояний по отношению к реальному расстоянию для того, чтобы рассчитать модель распределения погрешностей расчета определения местоположения системы.
Исходные данные для расчета индикации целостности могут поступать из любой навигационной системы, а также из любой связанной с ней вспомогательной системы. Изобретение позволяет выдавать в реальном времени индикацию целостности для событий очень низкой вероятности, базирующуюся на данных, переданных в реальном времени, и не базирующуюся на данных, полученных в результате анализов системы в какой-то момент времени и в конкретных условиях. Информация о целостности для вероятности 10-7 также не базируется на данных, определенных в период разработки системы для какой-то конкретной структуры. Преимуществом изобретения является то, что оно выдает индикацию целостности независимо от рассматриваемой спутниковой навигационной системы.
Преимуществом изобретения является то, что средство приема станции расчета индикации целостности измеряет в реальном времени данные, рассчитанные навигационной системой таким образом, что образцы оказываются достаточно декоррелированными для того, измерять отчетливые данные. В самом деле, необходимо, чтобы частота дискретизации данных была достаточно распределена во времени с тем, чтобы совокупность дискретов была репрезентативной. Методы классической инферентной статистики не позволяют измерять остатки очень низкой вероятности, которые мы как раз и стремимся обнаружить и это по причине их очень низкой вероятности появления.
Преимуществом изобретения является то, что моделируют в реальном времени запас между расчетной остаточной погрешностью и допустимой остаточной погрешностью при очень низкой вероятности появления, то есть вероятности, равной приблизительно 10-7. Как это показано на фиг. 3, номером 21 обозначена на оси абсцисс остаточная погрешность, оцениваемая с вероятностью 10-7. Цифрой 22 обозначена порог допуска целостности. Для применений в авиации, необходимо, чтобы вероятность того, что “22 ниже x” то есть “P(22<x)<10-7”, была ниже 10-7. Заштрихованная зона представляет собой “P(21<x)” и меньше 10-7 и из этого, таким образом, следует, что “P(22<x)<10-7”. При уровне целостности системы, соответствующем 10-7, соблюдается порог допуска 22 и промежуток 11 между 21 и 22 представляет собой запас целостности. Современные технологии не позволяют предоставлять в реальном времени для событий очень низкой вероятности указанную индикацию целостности. Их возможности ограничиваются только апостериорной индикацией превышении порога. Индикация запаса целостности, согласно изобретению, может оказаться полезной в применениях в авиации, и в частности, при оценке степени доверия в навигационной системе на этапах захода на посадку, когда погрешность становится критичной. Изобретение особенно предназначена для использования в наземных станциях типа GBAS, установленных в зонах аэропортов, но оно может найти свое применение вообще в любой системе расчета целостности спутниковой навигационной системы.
Согласно другому способу представления индикации целостности, моделируют в реальном времени остаточную погрешность 22 расчета позиционирования системы с очень низкой вероятностью появления, то есть порядка 10-7 и передают в реальном времени величину остаточной погрешности. Индикация целостности может представляться в виде абсолютной величины остатка для событий очень низкой вероятности. Как это показано на фиг. 3, цифрой 21 обозначается остаточная погрешность на уровне 10-7, а цифрой 22 - порог допуска. 21 меньше 22, таким образом, система демонстрирует целостность.
Изобретение предназначается в частности для наземной станции расчета типа GBAS спутниковой навигационной системы, снабженной вспомогательной системой, реализующей способ согласно изобретению.
Claims (7)
1. Способ оценки индикации целостности спутниковой навигационной системы, предоставляющий средства оценки индикации целостности спутниковой навигационной системы, отличающийся тем, что он реализует следующие этапы в реальном времени, чтобы оценить индикацию целостности (11) системы относительно погрешностей определения местоположения (2), которые должны быть очень низкой вероятности, ниже или равной приблизительно 10-7:
измерение данных, рассчитанных системой,
расчет модели распределения Н погрешностей расчета определения местоположения (2) системы,
определение параметров (a, b, c), характеризующих модель распределения (H), где "a" - параметр, определяющий самую вероятную величину распределения, "b" - параметр, указывающий на разброс экстремальных значений, а "c" - параметр, указывающий на значимость экстремальных значений в распределении,
моделирование в области вероятностей хвоста распределения H(x) вычислительным средством в зависимости от параметров (a, b, c), применяемых в теории экстремальных чисел следующим образом:

сравнение в реальном времени распределения погрешностей определения местоположения с порогом допуска, позволяющим представить индикацию целостности,
передача в реальном времени индикации целостности (11) системы.
измерение данных, рассчитанных системой,
расчет модели распределения Н погрешностей расчета определения местоположения (2) системы,
определение параметров (a, b, c), характеризующих модель распределения (H), где "a" - параметр, определяющий самую вероятную величину распределения, "b" - параметр, указывающий на разброс экстремальных значений, а "c" - параметр, указывающий на значимость экстремальных значений в распределении,
моделирование в области вероятностей хвоста распределения H(x) вычислительным средством в зависимости от параметров (a, b, c), применяемых в теории экстремальных чисел следующим образом:
сравнение в реальном времени распределения погрешностей определения местоположения с порогом допуска, позволяющим представить индикацию целостности,
передача в реальном времени индикации целостности (11) системы.
2. Способ согласно п.1, отличающийся тем, что измеряют погрешности положения относительно опорного положения для расчета модели распределения погрешностей расчета определения местоположения системы.
3. Способ согласно п.1, отличающийся тем, что измеряют погрешности псевдо-расстояний относительно реального расстояния для расчета модели распределения погрешностей расчета определения местоположения системы.
4. Способ согласно п.2, отличающийся тем, что измеряют в реальном времени данные, рассчитанные навигационной системой таким образом, что дискреты оказываются достаточно декоррелированными для того, чтобы измерить остатки очень низкой вероятности, ниже или равной приблизительно 10-7.
5. Способ согласно п.1, отличающийся тем, что моделируют в реальном времени запас (11) между расчетной остаточной погрешностью (21) и остаточной допустимой погрешностью (22) с очень низкой вероятностью, ниже или равной приблизительно 10-7, появления.
6. Способ согласно п.1, отличающийся тем, что моделируют в реальном времени остаточную погрешность (21) расчета позиционирования системы с очень низкой вероятностью, ниже или равной приблизительно 10-7, появления.
7. Наземная станция расчета спутниковой навигационной системы, отличающаяся тем, что она реализует способ согласно п.1.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0801325 | 2008-03-11 | ||
| FR0801325A FR2928741B1 (fr) | 2008-03-11 | 2008-03-11 | Dispositif et procede de surveillance d'integrite en temps reel d'un systeme de navigation par satellite |
| PCT/EP2009/052775 WO2009112483A1 (fr) | 2008-03-11 | 2009-03-10 | Dispositif et procede de surveillance d'integrite en temps reel d'un systeme de navigation par satellite |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2010141534A RU2010141534A (ru) | 2012-04-20 |
| RU2501039C2 true RU2501039C2 (ru) | 2013-12-10 |
Family
ID=39769388
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2010141534/07A RU2501039C2 (ru) | 2008-03-11 | 2009-03-10 | Устройство и способ контроля целостности в реальном времени спутниковой навигационной системы |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7994974B2 (ru) |
| JP (1) | JP2011517770A (ru) |
| CN (1) | CN101971047B (ru) |
| FR (1) | FR2928741B1 (ru) |
| RU (1) | RU2501039C2 (ru) |
| WO (1) | WO2009112483A1 (ru) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2585051C1 (ru) * | 2015-04-08 | 2016-05-27 | Открытое акционерное общество Московский научно-производственный комплекс "Авионика" имени О.В. Успенского (ОАО МНПК "Авионика") | Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления |
| RU2722092C1 (ru) * | 2019-08-27 | 2020-05-26 | Акционерное общество "Центральный научно-исследовательский институт машиностроения" (АО ЦНИИмаш) | Способ оценки эксплуатационных характеристик услуги абсолютной навигации системы ГЛОНАСС |
| RU2778093C1 (ru) * | 2021-05-27 | 2022-08-15 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Московский авиационный институт (национальный исследовательский университет)" | Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9726764B1 (en) | 2009-12-07 | 2017-08-08 | Rockwell Collins, Inc. | System and mehtod for providing space-based precision position correlations for promoting improved availability, accuracy and integrity |
| FR2957425B1 (fr) | 2010-03-12 | 2012-08-31 | Thales Sa | Procede et systeme de calcul pour l'evaluation de la performance en precision d'un systeme de navigation par satellite |
| JP5365593B2 (ja) * | 2010-09-13 | 2013-12-11 | 日本電気株式会社 | 信頼度の高いgps測位信号のみを用いた衛星航法補強システム |
| JP5408109B2 (ja) * | 2010-11-15 | 2014-02-05 | 日本電気株式会社 | 閾値決定装置、閾値決定方法およびプログラム |
| CN102749634B (zh) * | 2012-06-25 | 2014-02-26 | 北京航空航天大学 | 卫星导航区域增强系统中伪距加速度故障检测方法 |
| US8928527B2 (en) * | 2013-03-19 | 2015-01-06 | Honeywell International Inc. | Systems and methods for reducing error detection latency in LPV approaches |
| FR3013851B1 (fr) * | 2013-11-22 | 2016-01-08 | Thales Sa | Systeme et procede de determination de l'erreur de position d'un recepteur de localisation satellitaire |
| US20150172050A1 (en) * | 2013-12-12 | 2015-06-18 | Nxp B.V. | Random data from gnss signals and secure random value provisioning for secure software component implementations |
| JP6366357B2 (ja) * | 2014-05-16 | 2018-08-01 | 三菱電機株式会社 | 測位装置および測位方法 |
| CN104049261B (zh) * | 2014-05-28 | 2016-10-12 | 交通运输部水运科学研究所 | 基于grims的监测数据的处理方法和装置 |
| CN104215974B (zh) * | 2014-09-15 | 2017-01-11 | 中国航天标准化研究所 | 一种卫星导航系统的完好性监测可用性确定方法 |
| CN104898140B (zh) * | 2015-05-28 | 2017-07-25 | 北京航空航天大学 | 基于极值理论的卫星导航地基增强系统的误差包络方法 |
| CN105301602B (zh) * | 2015-11-06 | 2018-02-09 | 北京空间飞行器总体设计部 | 一种基于灰色关联度导航卫星完好性关键点综合识别方法 |
| US10345448B2 (en) * | 2016-01-21 | 2019-07-09 | Honeywell International Inc. | Using space based augmentation system (SBAS) ephemeris sigma information to reduce ground based augmentation systems (GBAS) ephemeris decorrelation parameter |
| CN105911567B (zh) * | 2016-05-14 | 2019-04-23 | 四川中卫北斗科技有限公司 | 一种gnss系统完好性评估方法和装置 |
| US10422872B2 (en) * | 2016-06-01 | 2019-09-24 | Honeywell International Inc. | Integrity monitoring of radar altimeters |
| JP6625237B2 (ja) * | 2016-11-07 | 2019-12-25 | 三菱電機株式会社 | 測位補強装置、測位補強システムおよび測位補強方法 |
| JP6786380B2 (ja) * | 2016-12-26 | 2020-11-18 | 株式会社クボタ | 位置測位システム |
| US10163515B1 (en) | 2017-09-25 | 2018-12-25 | SK Hynix Inc. | Memory system having feature boosting and operating method thereof |
| CN109901204B (zh) * | 2019-03-27 | 2020-12-04 | 北京航空航天大学 | 一种基于伪距误差分布模型的gbas完好性性能评估方法 |
| US20220250631A1 (en) * | 2019-06-14 | 2022-08-11 | Volvo Truck Corporation | A method for quantifying correctness of a vehicle model |
| DE102019208874A1 (de) * | 2019-06-18 | 2020-12-24 | Continental Teves Ag & Co. Ohg | Fehler- und Integritätsbewertung durch Bewegungsprädikation |
| JP7254005B2 (ja) * | 2019-09-11 | 2023-04-07 | 株式会社日立製作所 | 故障確率評価装置、及び、故障確率評価方法 |
| CN111694033B (zh) * | 2019-12-31 | 2023-04-28 | 泰斗微电子科技有限公司 | 移动装置的位置确定方法、装置及移动装置 |
| CN111983641B (zh) * | 2020-05-23 | 2022-04-19 | 中国电子科技集团公司第二十研究所 | 一种用于实时生成北斗星基增强系统完好性参数的方法 |
| CN113267793B (zh) * | 2021-05-26 | 2022-05-06 | 中国电子科技集团公司第五十四研究所 | 一种基于外部增强信息的gbas对流层参数生成方法 |
| CN113381910B (zh) * | 2021-06-08 | 2022-03-25 | 长沙学院 | 多星粗校时完好性分析方法、装置、计算机设备和介质 |
| CN113985457B (zh) * | 2021-11-01 | 2022-07-22 | 北京航空航天大学 | 一种gbas保护级计算方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU13104U1 (ru) * | 1999-05-25 | 2000-03-20 | Летно-исследовательский институт им. М.М. Громова | Мобильный аэродромный комплекс |
| US6373432B1 (en) * | 1997-03-21 | 2002-04-16 | The Board Of Trustees Of The Leland Stanford Junior University | System using leo satellites for centimeter-level navigation |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003348154A (ja) * | 2002-05-24 | 2003-12-05 | Nippon Telegr & Teleph Corp <Ntt> | 通信品質管理閾値決定方法及びその装置並びにプログラム及び情報記録媒体 |
| US7089452B2 (en) * | 2002-09-25 | 2006-08-08 | Raytheon Company | Methods and apparatus for evaluating operational integrity of a data processing system using moment bounding |
| EP1637899A1 (en) * | 2004-09-20 | 2006-03-22 | EADS Astrium GmbH | Method and apparatus for providing integrity information for users of global navigation system |
| US20070208600A1 (en) * | 2006-03-01 | 2007-09-06 | Babus Steven A | Method and apparatus for pre-emptive operational risk management and risk discovery |
| EP1930740B1 (en) * | 2006-12-08 | 2009-05-27 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Method for estimating parameters of a navigation signal |
| CN100442077C (zh) * | 2007-07-12 | 2008-12-10 | 北京航空航天大学 | 接收机自主完好性监测的可用性预测方法 |
| US8155938B2 (en) * | 2008-03-28 | 2012-04-10 | Carnegie Mellon University | Method and apparatus for sampling and predicting rare events in complex electronic devices, circuits and systems |
-
2008
- 2008-03-11 FR FR0801325A patent/FR2928741B1/fr active Active
-
2009
- 2009-03-10 US US12/922,093 patent/US7994974B2/en not_active Expired - Fee Related
- 2009-03-10 JP JP2010550170A patent/JP2011517770A/ja active Pending
- 2009-03-10 CN CN2009801087828A patent/CN101971047B/zh not_active Expired - Fee Related
- 2009-03-10 RU RU2010141534/07A patent/RU2501039C2/ru not_active IP Right Cessation
- 2009-03-10 WO PCT/EP2009/052775 patent/WO2009112483A1/fr active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6373432B1 (en) * | 1997-03-21 | 2002-04-16 | The Board Of Trustees Of The Leland Stanford Junior University | System using leo satellites for centimeter-level navigation |
| RU13104U1 (ru) * | 1999-05-25 | 2000-03-20 | Летно-исследовательский институт им. М.М. Громова | Мобильный аэродромный комплекс |
Non-Patent Citations (2)
| Title |
|---|
| Kannemans H. "An integrity, availability and continuity test method for EGNOS/WAAS", Vliegproeven en Instrumentatiesystemen Satellietnavigatie, Сентябрь 2007. * |
| Rife J. и др. Core Overbounding and its Implications for LAAS Integrity, ION GPS/GNSS, XX, XX, 21.09.2004, c.2810-2821. * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2585051C1 (ru) * | 2015-04-08 | 2016-05-27 | Открытое акционерное общество Московский научно-производственный комплекс "Авионика" имени О.В. Успенского (ОАО МНПК "Авионика") | Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления |
| RU2789700C1 (ru) * | 2019-06-18 | 2023-02-07 | Континенталь Тевес Аг Унд Ко. Охг | Оценка ошибок и целостности посредством прогнозирования перемещения |
| RU2722092C1 (ru) * | 2019-08-27 | 2020-05-26 | Акционерное общество "Центральный научно-исследовательский институт машиностроения" (АО ЦНИИмаш) | Способ оценки эксплуатационных характеристик услуги абсолютной навигации системы ГЛОНАСС |
| RU2778093C1 (ru) * | 2021-05-27 | 2022-08-15 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Московский авиационный институт (национальный исследовательский университет)" | Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110025558A1 (en) | 2011-02-03 |
| FR2928741A1 (fr) | 2009-09-18 |
| RU2010141534A (ru) | 2012-04-20 |
| CN101971047B (zh) | 2013-08-07 |
| WO2009112483A1 (fr) | 2009-09-17 |
| US7994974B2 (en) | 2011-08-09 |
| CN101971047A (zh) | 2011-02-09 |
| FR2928741B1 (fr) | 2020-06-26 |
| JP2011517770A (ja) | 2011-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2501039C2 (ru) | Устройство и способ контроля целостности в реальном времени спутниковой навигационной системы | |
| EP2544024B1 (en) | Satellite navigation system fault detection based on threshold derived from test statatistics | |
| US9557419B2 (en) | Methods for generating accuracy information on an ionosphere model for satellite navigation applications | |
| RU2615172C2 (ru) | Адаптивный способ для оценки электронного содержания ионосферы | |
| Castaldo et al. | P-RANSAC: An Integrity Monitoring Approach for GNSS Signal Degraded Scenario. | |
| US20200341153A1 (en) | Reducing bias impact on gnss integrity | |
| CN103901440A (zh) | Gnss数据信号质量的监测方法 | |
| KR102205329B1 (ko) | 위성 지오로케이션 측정들에서 에러의 레벨을 추정하고 상기 추정들의 신뢰성을 모니터링하는 방법 및 관련 디바이스 | |
| CN101395443A (zh) | 混合定位方法和设备 | |
| Pesonen | A framework for Bayesian receiver autonomous integrity monitoring in urban navigation | |
| Rodríguez-Pérez et al. | Inter-satellite links for satellite autonomous integrity monitoring | |
| Zhu et al. | Extended Kalman filter (EKF) innovation-based integrity monitoring scheme with C/N 0 weighting | |
| Zhu et al. | GNSS integrity enhancement for urban transport applications by error characterization and fault detection and exclusion (FDE) | |
| CN101839986A (zh) | 基于laas和waas的卫星导航监测方法和系统 | |
| EP3786671B1 (en) | Handling of araim terrain database induced errors | |
| US11047992B2 (en) | Positioning method and positioning terminal | |
| Encarnacion et al. | RTKLIB-based GPS localization for multipath mitigation in ITS applications | |
| Beckheinrich et al. | WISDOM: GNSS-R based flood monitoring | |
| Obst | Bayesian Approach for Reliable GNSS-based Vehicle Localization in Urban Areas | |
| El-Mowafy et al. | Positioning integrity, availability and precision for journey planning and navigation using GNSS integrated with low-cost sensors | |
| US8514127B2 (en) | Method and system of calculation for the evaluation of the precision performance of a satellite navigation system | |
| RU2385469C1 (ru) | Способ посадки летательных аппаратов с использованием спутниковой навигационной системы | |
| Tabti et al. | Improving availability of the EGNOS system in Algeria for dual frequency | |
| Kbayer et al. | New 3D-Mapping-Aided Approach for User Integrity Monitoring in Urban Environments using a Nonparametric Positioning Errors Modeling | |
| Felski et al. | Local monitoring of EGNOS services |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20200311 |