KR20200049314A - 흡착 및 얼라인먼트 방법, 흡착 시스템, 성막 방법, 성막 장치 및 전자 디바이스의 제조 방법 - Google Patents
흡착 및 얼라인먼트 방법, 흡착 시스템, 성막 방법, 성막 장치 및 전자 디바이스의 제조 방법 Download PDFInfo
- Publication number
- KR20200049314A KR20200049314A KR1020180132427A KR20180132427A KR20200049314A KR 20200049314 A KR20200049314 A KR 20200049314A KR 1020180132427 A KR1020180132427 A KR 1020180132427A KR 20180132427 A KR20180132427 A KR 20180132427A KR 20200049314 A KR20200049314 A KR 20200049314A
- Authority
- KR
- South Korea
- Prior art keywords
- adsorbent
- alignment
- electrostatic chuck
- adsorption
- substrate
- Prior art date
Links
- 238000001179 sorption measurement Methods 0.000 title claims abstract description 103
- 238000000034 method Methods 0.000 title claims abstract description 76
- 238000004519 manufacturing process Methods 0.000 title claims description 21
- 239000000758 substrate Substances 0.000 claims description 211
- 239000003463 adsorbent Substances 0.000 claims description 69
- 238000000151 deposition Methods 0.000 claims description 35
- 230000008021 deposition Effects 0.000 claims description 26
- 239000000463 material Substances 0.000 claims description 24
- 230000007246 mechanism Effects 0.000 claims description 22
- 230000015572 biosynthetic process Effects 0.000 claims description 15
- 238000001704 evaporation Methods 0.000 claims description 11
- 230000000977 initiatory effect Effects 0.000 claims 1
- 239000012528 membrane Substances 0.000 claims 1
- 239000010408 film Substances 0.000 description 73
- 239000010410 layer Substances 0.000 description 51
- 230000008569 process Effects 0.000 description 29
- 230000032258 transport Effects 0.000 description 16
- 230000005525 hole transport Effects 0.000 description 10
- 230000008020 evaporation Effects 0.000 description 8
- 239000002184 metal Substances 0.000 description 7
- 239000011368 organic material Substances 0.000 description 7
- 239000002594 sorbent Substances 0.000 description 5
- 238000011144 upstream manufacturing Methods 0.000 description 5
- 238000007740 vapor deposition Methods 0.000 description 5
- 239000002250 absorbent Substances 0.000 description 4
- 230000002745 absorbent Effects 0.000 description 4
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 239000001301 oxygen Substances 0.000 description 4
- 229910052760 oxygen Inorganic materials 0.000 description 4
- 230000006866 deterioration Effects 0.000 description 3
- 239000011159 matrix material Substances 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 239000012044 organic layer Substances 0.000 description 3
- 239000011241 protective layer Substances 0.000 description 3
- 239000010409 thin film Substances 0.000 description 3
- 238000001771 vacuum deposition Methods 0.000 description 3
- 239000004925 Acrylic resin Substances 0.000 description 2
- 229920000178 Acrylic resin Polymers 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 238000001816 cooling Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 239000011261 inert gas Substances 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 238000007665 sagging Methods 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 230000037303 wrinkles Effects 0.000 description 2
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 1
- 229910001111 Fine metal Inorganic materials 0.000 description 1
- 239000004642 Polyimide Substances 0.000 description 1
- 229910010293 ceramic material Inorganic materials 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000005137 deposition process Methods 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 229910001873 dinitrogen Inorganic materials 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000001465 metallisation Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000005416 organic matter Substances 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 238000005268 plasma chemical vapour deposition Methods 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6831—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using electrostatic chucks
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/04—Coating on selected surface areas, e.g. using masks
- C23C14/042—Coating on selected surface areas, e.g. using masks using masks
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/06—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the coating material
- C23C14/12—Organic material
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/24—Vacuum evaporation
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/50—Substrate holders
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02104—Forming layers
- H01L21/02365—Forming inorganic semiconducting materials on a substrate
- H01L21/02612—Formation types
- H01L21/02617—Deposition types
- H01L21/02631—Physical deposition at reduced pressure, e.g. MBE, sputtering, evaporation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67259—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
- H01L21/682—Mask-wafer alignment
-
- H01L51/0008—
-
- H01L51/56—
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N13/00—Clutches or holding devices using electrostatic attraction, e.g. using Johnson-Rahbek effect
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K71/00—Manufacture or treatment specially adapted for the organic devices covered by this subclass
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K71/00—Manufacture or treatment specially adapted for the organic devices covered by this subclass
- H10K71/10—Deposition of organic active material
- H10K71/16—Deposition of organic active material using physical vapour deposition [PVD], e.g. vacuum deposition or sputtering
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K71/00—Manufacture or treatment specially adapted for the organic devices covered by this subclass
- H10K71/10—Deposition of organic active material
- H10K71/16—Deposition of organic active material using physical vapour deposition [PVD], e.g. vacuum deposition or sputtering
- H10K71/166—Deposition of organic active material using physical vapour deposition [PVD], e.g. vacuum deposition or sputtering using selective deposition, e.g. using a mask
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K71/00—Manufacture or treatment specially adapted for the organic devices covered by this subclass
- H10K71/60—Forming conductive regions or layers, e.g. electrodes
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Manufacturing & Machinery (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Materials Engineering (AREA)
- Mechanical Engineering (AREA)
- Metallurgy (AREA)
- Organic Chemistry (AREA)
- Physical Vapour Deposition (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Electroluminescent Light Sources (AREA)
Abstract
본 발명의 흡착 및 얼라인먼트 방법은, 정전척을 이용한 피흡착체의 흡착 및 얼라인먼트 방법으로서, 상기 정전척에 의해 제1 피흡착체를 흡착하는 단계와, 상기 정전척에 의해 흡착된 상기 제1 피흡착체와, 제2 피흡착체 간의 상대 위치 어긋남을 조정하는 얼라인먼트 단계와, 상기 제1 피흡착체에 대해 상대 위치 어긋남이 조정된 상기 제2 피흡착체를, 상기 정전척에 의해 상기 제1 피흡착체를 거쳐 흡착하는 단계를 포함하고, 상기 얼라인먼트 단계는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 진행되는 도중에 개시하는 것을 특징으로 한다.
Description
본 발명은 흡착 및 얼라인먼트 방법, 흡착 시스템, 성막 방법, 성막 장치 및 전자 디바이스의 제조 방법에 관한 것이다.
유기 EL 표시장치(유기 EL 디스플레이)의 제조에 있어서는, 유기 EL 표시장치를 구성하는 유기 발광소자(유기 EL 소자; OLED)를 형성할 때에, 성막 장치의 증착원으로부터 증발한 증착 재료를 화소 패턴이 형성된 마스크를 통해 기판에 증착시킴으로써, 유기물층이나 금속층을 형성한다.
상향 증착 방식(Depo-up)의 성막 장치에 있어서, 증착원은 성막 장치의 진공용기의 하부에 설치되고, 기판은 진공용기의 상부에 배치되며, 기판의 하면에 증착이 이루어진다. 이러한 상향 증착 방식의 성막 장치의 진공용기내에서, 기판은 그 하면의 주연부만이 기판 홀더에 의해 보유 및 지지되기 때문에, 기판이 그 자중에 의해 처지며, 이것이 증착 정밀도를 떨어뜨리는 하나의 요인이 되고 있다. 상향 증착 방식 이외의 방식의 성막 장치에 있어서도, 기판의 자중에 의한 처짐은 발생할 가능성이 있다.
기판의 자중에 의한 처짐을 저감하기 위한 방법으로서 정전척을 사용하는 기술이 검토되고 있다. 즉, 기판의 상면을 그 전체에 걸쳐 정전척으로 흡착함으로써 기판의 처짐을 저감할 수 있다.
특허문헌 1에는, 정전척으로 기판 및 마스크를 흡착하는 기술이 제안되어 있다.
그러나, 이와 같이 성막 대상인 기판과 마스크를 정전척을 사용하여 흡착/밀착시킨 뒤 성막을 행하는 방식에 있어서, 특허문헌 1을 비롯한 종래에는, 기판 및 마스크 간의 얼라인먼트의 개시 타이밍 제어에 관한 충분한 고려는 되고 있지 않았다.
본 발명은, 정전척으로의 기판의 흡착 진행 상태를 고려하여 기판 및 마스크 간의 얼라인먼트의 개시 타이밍을 제어함으로써, 보다 빠른 시간 내에 성막 공정으로 진행하여 장치의 전체적인 공정 시간(Tact time)을 줄이는 것을 목적으로 한다.
본 발명의 일 실시형태에 따른 흡착 및 얼라인먼트 방법은, 정전척을 이용한 피흡착체의 흡착 및 얼라인먼트 방법으로서, 상기 정전척에 의해 제1 피흡착체를 흡착하는 단계와, 상기 정전척에 의해 흡착된 상기 제1 피흡착체와, 제2 피흡착체 간의 상대 위치 어긋남을 조정하는 얼라인먼트 단계와, 상기 제1 피흡착체에 대해 상대 위치 어긋남이 조정된 상기 제2 피흡착체를, 상기 정전척에 의해 상기 제1 피흡착체를 거쳐 흡착하는 단계를 포함하고, 상기 얼라인먼트 단계는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 진행되는 도중에 개시하는 것을 특징으로 한다.
본 발명의 일 실시형태에 따른 성막 방법은, 기판에 마스크를 거쳐서 증착 재료를 성막하는 방법으로서, 성막 장치 내로 마스크를 반입하는 단계와, 성막 장치 내로 기판을 반입하는 단계와, 상기 본 발명의 일 실시형태에 따른 흡착 및 얼라인먼트 방법을 사용하여, 상기 정전척에, 제1 피흡착체로서의 상기 기판과, 제2 피흡착체로서의 상기 마스크를, 상호 간의 상대 위치 어긋남을 조정하여 흡착하는 단계와, 상기 정전척에 상기 기판과 상기 마스크가 흡착된 상태에서, 증착 재료를 증발시켜 상기 마스크를 통해 상기 기판에 증착 재료를 성막하는 단계를 포함하는 것을 특징으로 한다.
본 발명의 일 실시형태에 따른 전자 디바이스의 제조 방법은, 상기 본 발명의 일 실시형태에 따른 성막 방법을 사용하여 전자 디바이스를 제조하는 것을 특징으로 한다.
본 발명의 일 실시형태에 따른 흡착 시스템은, 제1 피흡착체와, 상기 제1 피흡착체를 거쳐 제2 피흡착체를 흡착하기 위한 흡착 시스템으로서, 전극부를 포함하고, 상기 전극부에 인가되는 전압 제어를 통해, 상기 제1 피흡착체, 및 상기 제1 피흡착체를 거쳐 상기 제2 피흡착체를 흡착하는 정전척과, 제어부와, 상기 제1 피흡착체와 상기 제2 피흡착체 간의 상대 위치 어긋남을 조정하는 얼라인먼트를 위한 위치 조정 기구를 포함하고, 상기 제어부는, 상기 정전척에 대한 상기 제1 피흡착체의 흡착이 진행되는 도중에 상기 제1 피흡착체와 상기 제2 피흡착체 간의 상대 위치 어긋남 조정을 위한 상기 얼라인먼트를 개시하도록 상기 위치 조정 기구를 제어하는 것을 특징으로 한다.
본 발명의 일 실시형태에 따른 성막 장치는, 기판에 마스크를 거쳐서 성막을 행하기 위한 성막 장치로서, 제1 피흡착체인 기판과 제2 피흡착체인 마스크를 흡착하기 위한 흡착 시스템을 포함하며, 상기 흡착 시스템은 상기 본 발명의 일 실시형태에 따른 흡착 시스템인 것을 특징으로 한다.
본 발명에 의하면, 정전척으로의 기판의 흡착 진행 상태를 고려하여 기판 및 마스크 간의 얼라인먼트의 개시 타이밍을 제어함으로써, 보다 빠른 시간 내에 성막 공정으로 진행하여 장치의 전체적인 공정 시간(Tact time)을 줄일 수 있다.
도 1은 전자 디바이스의 제조 장치의 일부의 모식도이다.
도 2는 본 발명의 일 실시형태에 따른 성막 장치의 모식도이다.
도 3(a) 내지 도3(c)는 본 발명의 일 실시형태에 따른 정전척 시스템의 개념도 및 모식도이다.
도 4는 본 발명의 일 실시형태에 따른 성막 프로세스를 도시한 공정도이다.
도 5(a)는 기판 상에 형성되는 얼라인먼트 마크의 예를, 도 5(b)는 마스크 상에 형성되는 얼라인먼트 마크의 예를 도시한 도면이다.
도 6은 정전척으로의 기판 흡착 시퀀스의 상세 공정을 나타내는 공정도이다.
도 7은 전자 디바이스를 나타내는 모식도이다.
도 2는 본 발명의 일 실시형태에 따른 성막 장치의 모식도이다.
도 3(a) 내지 도3(c)는 본 발명의 일 실시형태에 따른 정전척 시스템의 개념도 및 모식도이다.
도 4는 본 발명의 일 실시형태에 따른 성막 프로세스를 도시한 공정도이다.
도 5(a)는 기판 상에 형성되는 얼라인먼트 마크의 예를, 도 5(b)는 마스크 상에 형성되는 얼라인먼트 마크의 예를 도시한 도면이다.
도 6은 정전척으로의 기판 흡착 시퀀스의 상세 공정을 나타내는 공정도이다.
도 7은 전자 디바이스를 나타내는 모식도이다.
이하, 도면을 참조하여 본 발명의 바람직한 실시형태 및 실시예를 설명한다. 다만, 이하의 실시형태 및 실시예는 본 발명의 바람직한 구성을 예시적으로 나타내는 것일 뿐이며, 본 발명의 범위는 이들 구성에 한정되지 않는다. 또한, 이하의 설명에 있어서, 장치의 하드웨어 구성 및 소프트웨어 구성, 처리 흐름, 제조조건, 크기, 재질, 형상 등은, 특히 특정적인 기재가 없는 한, 본 발명의 범위를 이것으로 한정하려는 취지인 것은 아니다.
본 발명은, 기판의 표면에 각종 재료를 퇴적시켜 성막을 행하는 장치에 적용할 수 있으며, 진공 증착에 의해 소망하는 패턴의 박막(재료층)을 형성하는 장치에 바람직하게 적용할 수 있다. 기판의 재료로는 유리, 고분자재료의 필름, 금속 등의 임의의 재료를 선택할 수 있고, 예컨대, 기판은 유리 기판 상에 폴리이미드 등의 필름이 적층된 기판이어도 된다. 또한 증착 재료로서도 유기 재료, 금속성 재료(금속, 금속 산화물 등) 등의 임의의 재료를 선택할 수 있다. 이하의 설명에서 설명하는 진공 증착 장치 이외에도, 스퍼터 장치나 CVD(Chemical Vapor Deposition) 장치를 포함하는 성막 장치에도, 본 발명을 적용할 수 있다. 본 발명의 기술은, 구체적으로는, 유기 전자 디바이스(예를 들면, 유기 발광 소자, 박막 태양 전지), 광학 부재 등의 제조 장치에 적용 가능하다. 그 중에서도, 증착 재료를 증발시켜 마스크를 통해 기판에 증착시킴으로써 유기 발광 소자를 형성하는 유기 발광소자의 제조 장치는, 본 발명의 바람직한 적용예의 하나이다.
<전자 디바이스 제조 장치>
도 1은 전자 디바이스의 제조 장치의 일부의 구성을 모식적으로 도시한 평면도이다.
도 1의 제조 장치는, 예를 들면 스마트폰 용의 유기 EL 표시장치의 표시 패널의 제조에 이용된다. 스마트폰 용의 표시 패널의 경우, 예를 들면, 4.5세대의 기판(약 700 ㎜ × 약 900 ㎜)이나 6세대의 풀사이즈(약 1500 ㎜ × 약 1850 ㎜) 또는 하프컷 사이즈(약 1500 ㎜ × 약 925 ㎜)의 기판에 유기 EL 소자의 형성을 위한 성막을 행한 후, 해당 기판을 잘라 내어 복수의 작은 사이즈의 패널로 제작한다.
전자 디바이스 제조 장치는, 일반적으로 복수의 클러스터 장치(1)와, 클러스터 장치(1) 사이를 연결하는 중계장치를 포함한다.
클러스터 장치(1)는, 기판(S)에 대한 처리(예컨대, 성막)를 행하는 복수의 성막 장치(11)와, 사용 전후의 마스크(M)를 수납하는 복수의 마스크 스톡 장치(12)와, 그 중앙에 배치되는 반송실(13)을 구비한다. 반송실(13)은 도 1에 도시한 바와 같이, 복수의 성막 장치(11) 및 마스크 스톡 장치(12) 각각과 접속된다.
반송실(13) 내에는, 기판 및 마스크를 반송하는 반송 로봇(14)이 배치된다. 반송로봇(14)은, 상류 측에 배치된 중계 장치의 패스실(15)로부터 성막 장치(11)에 기판(S)을 반송한다. 또한, 반송로봇(14)은 성막 장치(11)와 마스크 스톡 장치(12)간에 마스크(M)를 반송한다. 반송 로봇(14)은, 예를 들면, 다관절 아암에, 기판(S) 또는 마스크(M)를 보유지지하는 로봇 핸드가 장착된 구조를 갖는 로봇일 수 있다.
성막 장치(11)(증착 장치라고도 부름)에서는, 증착원에 수납된 증착 재료가 히터에 의해 가열되어 증발하고, 마스크를 통해 기판상에 증착된다. 반송 로봇(14)과의 기판(S)의 주고받음, 기판(S)과 마스크(M)의 상대 위치의 조정(얼라인먼트), 마스크(M) 상으로의 기판(S)의 고정, 성막(증착) 등의 일련의 성막 프로세스는, 성막 장치(11)에 의해 행해진다.
마스크 스톡 장치(12)에는 성막 장치(11)에서의 성막 공정에 사용될 새로운 마스크 및 사용이 끝난 마스크가 두 개의 카세트에 나뉘어져 수납된다. 반송 로봇(14)은, 사용이 끝난 마스크를 성막 장치(11)로부터 마스크 스톡 장치(12)의 카세트로 반송하며, 마스크 스톡 장치(12)의 다른 카세트에 수납된 새로운 마스크를 성막 장치(11)로 반송한다.
클러스터 장치(1)에는 기판(S)의 흐름방향으로 상류 측으로부터의 기판(S)을 해당 클러스터 장치(1)로 전달하는 패스실(15)과, 해당 클러스터 장치(1)에서 성막 처리가 완료된 기판(S)을 하류 측의 다른 클러스터 장치로 전달하기 위한 버퍼실(16)이 연결된다. 반송실(13)의 반송 로봇(14)은 상류 측의 패스실(15)로부터 기판(S)을 받아서, 해당 클러스터 장치(1)내의 성막 장치(11)중 하나(예컨대, 성막 장치(11a))로 반송한다. 또한, 반송 로봇(14)은 해당 클러스터 장치(1)에서의 성막 처리가 완료된 기판(S)을 복수의 성막 장치(11) 중 하나(예컨대, 성막 장치(11b))로부터 받아서, 하류 측에 연결된 버퍼실(16)로 반송한다.
버퍼실(16)과 패스실(15) 사이에는 기판의 방향을 바꾸어 주는 선회실(17)이 설치된다. 선회실(17)에는 버퍼실(16)로부터 기판(S)을 받아 기판(S)을 180도 회전시켜 패스실(15)로 반송하기 위한 반송 로봇(18)이 설치된다. 이를 통해, 상류측 클러스터 장치와 하류측 클러스터 장치에서 기판(S)의 방향이 동일하게 되어 기판 처리가 용이해진다.
패스실(15), 버퍼실(16), 선회실(17)은 클러스터 장치 사이를 연결하는 소위 중계장치로서, 클러스터 장치의 상류측 및/또는 하류 측에 설치된 중계장치는, 패스실, 버퍼실, 선회실 중 적어도 하나를 포함한다.
성막 장치(11), 마스크 스톡 장치(12), 반송실(13), 버퍼실(16), 선회실(17) 등은 유기발광 소자의 제조과정에서, 고진공 상태로 유지된다. 패스실(15)은, 통상 저진공 상태로 유지되나, 필요에 따라 고진공 상태로 유지될 수도 있다.
본 실시예에서는, 도 1을 참조하여, 전자 디바이스 제조 장치의 구성에 대해서 설명하였으나, 본 발명은 이에 한정되지 않으며, 다른 종류의 장치나 챔버를 가질 수도 있으며, 이들 장치나 챔버 간의 배치가 달라질 수도 있다.
이하, 성막 장치(11)의 구체적인 구성에 대하여 설명한다.
<성막 장치>
도 2는 성막 장치(11)의 구성을 나타낸 모식도이다. 이하의 설명에 있어서는, 연직 방향을 Z 방향으로 하는 XYZ 직교 좌표계를 사용한다. 성막 시에 기판(S)이 수평면(XY 평면)과 평행하게 고정될 경우, 기판(S)의 단변 방향(단변에 평행한 방향)을 X 방향, 장변 방향(장변에 평행한 방향)을 Y 방향으로 한다. 또 Z 축 주위의 회전각을 θ로 표시한다.
성막 장치(11)는, 진공 분위기 또는 질소 가스 등의 불활성 가스 분위기로 유지되는 진공 용기(21)와, 진공 용기(21)내에 설치되는 기판 지지 유닛(22)과, 마스크 지지 유닛(23)과, 정전척(24)과, 증착원(25)을 포함한다.
기판 지지 유닛(22)은 반송실(13)에 설치된 반송 로봇(14)이 반송하여 온 기판(S)을 수취하여, 보유 지지하는 수단으로서, 기판 홀더라고도 부른다.
기판 지지 유닛(22)의 아래에는 마스크 지지 유닛(23)이 설치된다. 마스크 지지 유닛(23)은, 반송실(13)에 설치된 반송로봇(14)이 반송하여 온 마스크(M)를 수취하여, 보유 지지하는 수단으로서, 마스크 홀더라고도 부른다.
마스크(M)는, 기판(S) 상에 형성될 박막 패턴에 대응하는 개구 패턴을 가지며, 마스크 지지 유닛(23)상에 재치된다. 특히, 스마트폰용 유기 EL 소자를 제조하는데 사용되는 마스크는 미세한 개구패턴이 형성된 금속제 마스크로서, FMM(Fine Metal Mask)이라고도 부른다.
기판 지지 유닛(22)의 상방에는 기판을 정전 인력에 의해 흡착하여 고정하기 위한 정전척(24)이 설치된다. 정전척(24)은 유전체(예컨대, 세라믹재질) 매트릭스내에 금속전극 등의 전기회로가 매설된 구조를 갖는다. 정전척(24)은, 쿨롱력 타입의 정전척이어도 되고, 존슨-라벡력 타입의 정전척이어도 되며, 그래디언트력 타입의 정전척이어도 된다. 정전척(24)은, 그래디언트력 타입의 정전척인 것이 바람직하다. 정전척(24)을 그래디언트력 타입의 정전척으로 함으로써, 기판(S)이 절연성 기판인 경우라도, 정전척(24)에 의해 양호하게 흡착될 수 있다. 정전척(24)이 쿨롱력 타입의 정전척인 경우에는, 금속전극에 플러스(+) 및 마이너스(-)의 전위가 인가되면, 유전체 매트릭스를 통해 기판(S)과 같은 피흡착체에 금속 전극과 반대극성의 분극 전하가 유도되며, 이들 간의 정전 인력에 의해 기판(S)이 정전척(24)에 흡착 고정된다.
정전척(24)은 하나의 플레이트로 형성되어도 되고, 복수의 서브 플레이트를 가지도록 형성되어도 된다. 또한, 하나의 플레이트로 형성되는 경우에도 그 내부에 복수의 전기회로를 포함하여, 하나의 플레이트내에서 위치에 따라 정전인력이 다르도록 제어할 수도 있다.
본 실시형태에서는 후술하는 바와 같이, 성막 전에 정전척(24)으로 기판(S, 제1 피흡착체)뿐만 아니라, 마스크(M, 제2 피흡착체)도 흡착하여 보유지지한다. 그 후, 정전척(24)으로 기판(S, 제1 피흡착체)과 마스크(M, 제2 피흡착체)를 보유지지한 상태에서 성막을 행하며, 성막을 완료한 후에는 기판(S, 제1 피흡착체)과 마스크(M, 제2 피흡착체)에 대한 정전척(24)에 의한 보유지지를 해제한다.
즉, 본 실시예에서는, 정전척(24)의 연직방향의 하측에 놓인 기판(S, 제1 피흡착체)을 정전척(24)으로 흡착 및 보유지지하고, 그 후에, 기판(S, 제1 피흡착체)을 사이에 두고 정전척(24)의 반대측에 놓인 마스크(M, 제2 피흡착체)를, 기판(S, 제1 피흡착체)너머로 정전척(24)으로 흡착하여 보유지지한다. 그리고 정전척(24)으로 기판(S, 제1 피흡착체)과 마스크(M, 제2 피흡착체)를 보유지지한 상태에서 성막을 행한 이후에는, 기판(S, 제1 피흡착체)과 마스크(M, 제2 피흡착체)를 정전척(24)으로부터 박리한다.
도 2에 도시하지 않았으나, 정전척(24)의 흡착면과는 반대측에 기판(S)의 온도 상승을 억제하는 냉각기구(예컨대, 냉각판)를 설치함으로써, 기판(S)상에 퇴적된 유기재료의 변질이나 열화를 억제하는 구성으로 하여도 된다.
증착원(25)은 기판에 성막될 증착 재료가 수납되는 도가니(미도시), 도가니를 가열하기 위한 히터(미도시), 증착원으로부터의 증발 레이트가 일정해질 때까지 증착 재료가 기판으로 비산하는 것을 막는 셔터(미도시) 등을 포함한다. 증착원(25)은 점(point) 증착원이나 선형(linear) 증착원 등, 용도에 따라 다양한 구성을 가질 수 있다.
도 2에 도시하지 않았으나, 성막 장치(11)는 기판에 증착된 막 두께를 측정하기 위한 막 두께 모니터(미도시) 및 막 두께 산출 유닛(미도시)를 포함한다.
진공 용기(21)의 상부 외측(대기측)에는 기판 Z 액츄에이터(26), 마스크 Z 액츄에이터(27), 정전척 Z 액츄에이터(28), 위치 조정 기구(29) 등이 설치된다. 이들 액츄에이터와 위치 조정 기구는, 예컨대, 모터와 볼나사, 또는 모터와 리니어 가이드 등으로 구성된다. 기판 Z 액츄에이터(26)는, 기판 지지 유닛(22)을 승강(Z방향 이동)시키기 위한 구동수단이다. 마스크 Z 액츄에이터(27)는, 마스크 지지 유닛(23)을 승강(Z방향 이동)시키기 위한 구동수단이다. 정전척 Z 액츄에이터(28)는, 정전척(24)을 승강(Z방향 이동)시키기 위한 구동수단이다.
위치 조정 기구(29)는, 정전척(24)과 기판(S) 및/또는 기판(S)과 마스크(M) 간의 위치 어긋남을 조정(얼라인먼트)하기 위한 구동 수단이다. 즉, 위치 조정 기구(29)는, 기판 지지 유닛(22) 및 마스크 지지 유닛(23)에 대하여, 정전척(24)을 수평면에 평행한 면 내에서 X 방향, Y 방향, θ 방향 중 적어도 하나의 방향으로 상대적으로 이동/회전시키기 위한 수평구동기구이다. 본 실시형태에서는, 기판지지유닛(22) 및 마스크 지지 유닛(23)의 수평면 내에서의 이동은 고정하고, 정전척(24)을 XYθ 방향으로 이동시키도록 위치 조정 기구를 구성하고 있으나, 본 발명은 이에 한정되지 않으며, 정전척(24)의 수평방향으로의 이동은 고정하고, 기판지지유닛(22) 및 마스크 지지 유닛(23)을 XYθ 방향으로 이동시키도록 위치 조정 기구를 구성하여도 된다.
진공용기(21)의 외측 상면에는, 전술한 구동기구 이외에, 진공 용기(21)의 상면에 설치된 투명창을 통해 기판(S) 및 마스크(M)에 형성된 얼라인먼트 마크를 촬영하기 위한 얼라인먼트용 카메라(20a, 20b)가 설치된다. 얼라인먼트용 카메라(20a, 20b)에 의해 촬영된 화상으로부터 기판(S) 상의 얼라인먼트 마크와 마스크(M) 상의 얼라인먼트 마크를 인식함으로써, 각각의 XY 위치나 XY 면내에서의 상대 어긋남을 계측할 수 있다. 기판(S)과 마스크(M) 간의 얼라인먼트는, 대략적으로 위치 맞춤을 행하는 제1 위치 조정 공정인 제1 얼라인먼트("러프 얼라인먼트(rough alignment)"라고도 함)와, 고정밀도로 위치 맞춤을 행하는 제2 위치 조정 공정인 제2 얼라인먼트("파인 얼라인먼트(fine alignment)"라고도 함)의 2 단계의 얼라인먼트를 실시하는 것이 바람직하다. 그 경우, 저해상도이지만 광시야각의 제1 얼라인먼트 용의 카메라(20a)와, 협시야각이지만 고해상도의 제2 얼라인먼트 용의 카메라(20b)의 2 종류의 카메라를 이용하면 좋다. 본 실시예에서는, 기판(S) 및 마스크(120) 각각에 대하여, 대향하는 한 쌍의 변의 2 군데에 설치한 얼라인먼트 마크를 2 대의 제1 얼라인먼트용 카메라(20a)로 측정하고, 기판(S) 및 마스크(120)의 4 코너에 설치한 얼라인먼트 마크를 4 대의 제2 얼라인먼트용 카메라(20b)로 측정한다. 얼라인먼트 마크 및 그 측정용 카메라의 수는, 특히 한정되지 않고, 예를 들어 파인 얼라인먼트의 경우, 기판(S) 및 마스크(120)의 대향하는 2 코너에 설치된 마크를 2대의 카메라로 측정하도록 하여도 좋다.
성막 장치(11)는 제어부(미도시)를 구비한다. 제어부는 기판(S)의 반송 및 얼라인먼트, 증착원(25)의 제어, 성막의 제어 등의 기능을 갖는다. 제어부는 예를 들면, 프로세서, 메모리, 스토리지, I/O 등을 갖는 컴퓨터에 의해 구성 가능하다. 이 경우, 제어부의 기능은 메모리 또는 스토리지에 기억된 프로그램을 프로세서가 실행함으로써 실현된다. 컴퓨터로서는 범용의 퍼스널 컴퓨터를 사용하여도 되고, 임베디드형의 컴퓨터 또는 PLC(programmable logic controller)를 사용하여도 좋다. 또는, 제어부의 기능의 일부 또는 전부를 ASIC나 FPGA와 같은 회로로 구성하여도 좋다. 또한, 성막 장치별로 제어부가 설치되어도 되고, 하나의 제어부가 복수의 성막 장치를 제어하는 것으로 구성하여도 된다.
<정전척 시스템>
도 3a 내지 도 3c를 참조하여 본 실시형태에 따른 정전척 시스템(30)에 대하여 설명한다.
도 3a는 본 실시형태의 정전척 시스템(30)의 개념적인 블록도이고, 도 3b는 정전척(24)의 모식적 단면도이며, 도 3c는 정전척(24)의 모식적 평면도이다.
본 실시형태의 정전척 시스템(30)은 도 3a에 도시된 바와 같이, 정전척(24), 전압 인가부(31) 및 전압 제어부(32)를 포함한다.
전압 인가부(31)는, 정전척(24)의 전극부에 정전 인력을 발생시키기 위한 전압을 인가한다.
전압 제어부(32)는, 정전척 시스템(30)의 흡착공정 또는 성막 장치(11)의 성막 프로세스의 진행에 따라 전압 인가부(31)에 의해 전극부에 가해지는 전압의 크기, 전압의 인가 개시 시점, 전압의 유지 시간, 전압의 인가 순서 등을 제어한다. 전압 제어부(32)는 예컨대, 정전척(24)의 전극부에 포함되는 복수의 서브 전극부(241 ~ 249)에의 전압 인가를 서브 전극부 별로 독립적으로 제어할 수 있다. 본 실시형태에서는, 전압 제어부(32)가 성막 장치(11)의 제어부와 별도로 구현되지만, 본 발명은 이에 한정되지 않으며, 성막 장치(11)의 제어부에 통합되어도 된다.
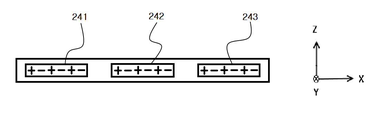
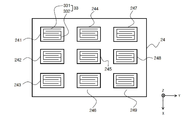
정전척(24)은 흡착면에 피흡착체(예컨대, 기판(S), 마스크(M))를 흡착하기 위한 정전 흡착력을 발생시키는 전극부를 포함하며, 전극부는 복수의 서브전극부(241 ~ 249)를 포함할 수 있다. 예컨대, 본 실시형태의 정전척(24)은, 도 3c에 도시한 바와 같이, 정전척(24)의 장변과 평행한 방향(Y방향) 및/또는 정전척(24)의 단변과 평행한 방향(X 방향)을 따라 분할된 복수의 서브 전극부(241 내지 249)를 포함한다.
각 서브 전극부는 정전 흡착력을 발생시키기 위해 플러스(제1 극성) 및 마이너스(제2 극성)의 전위가 인가되는 전극쌍(33)을 포함한다. 예컨대, 각각의 전극쌍(33)은 플러스 전위가 인가되는 제1 전극(331)과 마이너스 전위가 인가되는 제2 전극(332)를 포함한다.
제1 전극(331) 및 제2 전극(332)은, 도 3c에 도시한 바와 같이, 각각 빗 형상을 가진다. 예컨대, 제1 전극(331) 및 제2 전극(332)은 각각 복수의 빗살부 및 복수의 빗살부가 연결되는 기부(基部)를 가진다. 각 전극(331, 332)의 기부는 복수의 빗살부에 전위를 공급하며, 복수의 빗살부는 피흡착체와의 사이에서 정전 흡착력을 발생시킨다. 하나의 서브 전극부내에서 제1 전극(331)의 빗살부 각각은 제2 전극(332)의 빗살부 각각과 대향하도록 교대로 배치된다. 이처럼, 각 전극(331, 332)의 각 빗살부가 대향하고 또한 서로 얽힌 구성으로 함으로써, 다른 전위가 인가된 전극 간의 간격을 좁힐 수 있고, 커다란 불평등 전계를 형성하여, 그래디언트력에 의해 기판(S)을 흡착할 수 있다.
본 실시예에서는, 정전척(24)의 서브 전극부(241 ~ 249)의 각 전극(331, 332)이 빗형상을 가지는 것으로 설명하였으나, 본 발명은 이에 한정되지 않으며, 피흡착체와의 사이에서 정전인력을 발생시킬 수 있는 한, 다양한 형상을 가질 수 있다.
본 실시형태의 정전척(24)은 복수의 서브 전극부에 대응하는 복수의 흡착부를 가진다. 예컨대, 본 실시예의 정전척(24)은, 도 3c에 도시된 바와 같이, 9개의 서브 전극부(241 ~ 249)에 대응하는 9개의 흡착부를 가질 수 있으나, 이에 한정되는 것은 아니며, 기판(S)의 흡착을 보다 정밀하게 제어하기 위해, 이와 다른 개수의 흡착부를 가질 수도 있다.
흡착부는 정전척(24)의 장변 방향(Y축 방향) 및 단변 방향(X축 방향)으로 분할되도록 설치될 수 있으나, 이에 한정되지 않으며, 정전척(24)의 장변 방향 또는 단변 방향으로만 분할될 수도 있다. 복수의 흡착부는, 물리적으로 하나인 플레이트가 복수의 전극부를 가짐으로써 구현될 수도 있고, 물리적으로 분할된 복수의 플레이트 각각이 하나 또는 그 이상의 전극부를 가짐으로써 구현될 수도 있다. 도 3c에 도시한 실시예에 있어서, 복수의 흡착부 각각이 복수의 서브 전극부 각각에 대응하도록 구현할 수 있으나, 하나의 흡착부가 복수의 서브 전극부를 포함하도록 구현할 수도 있다.
예컨대, 전압 제어부(32)에 의한 서브 전극부(241 ~ 249)에의 전압의 인가를 제어함으로써, 후술하는 바와 같이, 기판(S)의 흡착진행 방향(X 방향)과 교차하는 방향(Y방향)으로 배치된 3개의 서브 전극부(241, 244, 247)가 하나의 흡착부를 이루도록 할 수 있다. 즉, 3개의 서브 전극부(241, 244, 247) 각각은 독립적으로 전압 제어가 가능하지만, 이들 3개의 서브 전극부(241, 244, 247)에 동시에 전압이 인가되도록 제어함으로써, 이들 3개의 서브 전극부(241, 244, 247)가 하나의 흡착부로서 기능하게 할 수 있다. 복수의 흡착부 각각에 독립적으로 기판 흡착이 이루어질 수 있는 한, 그 구체적인 물리적 구조 및 전기회로적 구조는 다를 수 있다.
<얼라인먼트 방법 및 성막 프로세스>
이하, 도 4를 참조하여, 성막 장치(11) 내로의 기판(S)/마스크(M)의 반입으로부터, 얼라인먼트를 거쳐 성막이 행해지기까지의 일련의 공정을 설명한다.
마스크(M)가 진공 용기(21) 내로 반입되어 마스크 지지 유닛(23)에 재치되고(도 4(a)), 이어서, 해당 마스크(M)를 사용하여 증착재료가 성막될 기판(S)이 진공 용기(21)내로 반입되어 기판 지지 유닛(22)의 지지부 상에 재치된다(도 4(b)).
이 상태에서, 기판(S)을 정전척(24)에 흡착시키기 전에, 정전척(24)과 기판지지유닛(22)에 재치된 기판(S) 간의 위치 어긋남을 조정하는 얼라인먼트를 행한다(도 4(c)). 즉, 반송 로봇(14)에 의한 기판(S) 반입 시 반송오차 등으로 인해, 정전척(24)과 기판(S)간의 상대적 위치가 어긋나는 경우가 발생할 수 있으므로, 우선 이러한 기판(S)과 정전척(24)간의 상대 위치 어긋남을 조정하고 나서 기판(S)이 정전척(24)에 흡착되도록 한다. 성막 대상체인 기판(S)과 마스크(M) 간의 위치 정렬(얼라인먼트)에 앞서 행해지는, 이러한 정전척(24)에 대한 기판(S)의 위치 맞춤을 "프리 얼라인먼트(pre-alignment)"라고 칭한다.
기판(S)의 프리 얼라인먼트 공정에서는, 예컨대, 직사각형 정전척(24)의 코너부와 기판(S)에 형성된 얼라인먼트 마크를 얼라인먼트용 카메라로 촬영하여 정전척(24)에 대한 기판(S)의 상대적인 위치 어긋남량을 측정한다. 또는, 정전척(24) 측에도 코너부에 별도의 정전척 얼라인먼트 마크를 형성하고 이를 기판 얼라인먼트 마크와 함께 동시에 촬영하여, 상대적인 위치 어긋남량을 측정하여도 된다.
정전척(24)과 기판(S)의 상대 위치가 어긋나 있는 것으로 판명되면, 전술한 위치 조정 기구(29)를 수평방향(XYθ 방향)으로 구동시켜, 정전척(24)과 기판(S)의 수평방향 (XYθ 방향)에 있어서의 상대 위치를 조정한다. 위치 조정 기구(29)에 의한 위치 조정은, 전술한 바와 같이, 수평 방향으로의 이동이 고정된 기판 지지 유닛(22)에 대하여 정전척(24)을 XYθ 방향으로 이동시키는 방식이어도 되고, 반대로 정전척(24)의 수평방향으로의 이동은 고정하고 기판지지유닛(22)을 XYθ 방향으로 이동시키는 방식이어도 된다.
정전척(24)에 대한 기판(S)의 위치 조정(기판 프리 얼라인먼트)이 완료되면, 도 4(d)에 도시한 바와 같이, 정전척(24)을 정전척 Z 액츄에이터(28)에 의해 하강시키고, 정전척(24)에 소정의 전압(ΔV1)을 인가하여 기판(S)을 정전척(24)에 흡착시킨다.
이어서, 정전척(24)으로의 기판(S)이 흡착이 진행되는 동안에, 도 4(e)~도 4(g)에 도시한 바와 같이, 성막 대상인 기판(S)과 마스크(M) 간의 위치 정렬(얼라인먼트)을 행한다.
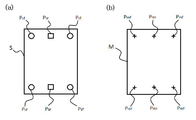
기판(S)과 마스크(M) 간의 얼라인먼트는 전술한 바와 같이 2 단계의 공정으로 행해진다. 이를 위해, 기판(S)과 마스크(M)에는 각각 도 5에 도시된 바와 같이, 소정의 위치에 얼라인먼트용 마크가 형성되어 있다.
우선, 도 4(e)에 도시된 바와 같이, 기판(S)이 마스크(M)로부터 이격된 상태에서, 기판(S)과 마스크(M)에 각각 형성된 제1 얼라인먼트용 마크(Psr, Pmr; 도 5 참조)를 제1 얼라인먼트용 카메라(20a)로 촬영하고, 그 촬영 화상에 기초하여 XY 면 내(마스크(M)의 표면에 평행한 방향)에 있어서의 기판(S)과 마스크(M)의 상대 위치를 대략적으로 조정하는 러프 얼라인먼트(제1 얼라인먼트)를 행한다. 러프 얼라인먼트에 이용하는 카메라(20a)는 대략적인 위치 맞춤이 가능하도록 저해상도이지만 광시야각인 카메라이다. 제1 얼라인먼트용 마크(Psr, Pmr) 및 이를 촬영하기 위한 카메라(20a)는, 기판(S) 및 마스크(M)의 대략 단변 중앙에 해당하는 위치에 설치되고 있다.
러프 얼라인먼트가 완료되면, 정전척 Z 액츄에이터(28)를 구동시켜, 정전척(24)에 흡착된 기판(S)을 마스크(M) 측으로 하강시킨다(도 4(f)). 이 때, 기판 Z 액츄에이터(26)에 의해 기판 지지 유닛(22)을 정전척(24)의 하강에 맞춰 함께 하강시킨다.
정전척(24)에 흡착된 기판(S)이 제2 얼라인먼트 공정으로서 파인 얼라인먼트를 행할 수 있는 계측 위치까지 하강된 상태에서, 제2 얼라인먼트용 카메라(파인 얼라인먼트용 카메라; 20b)를 사용하여 기판(S) 및 마스크(M)에 각각 형성된 제2 얼라인먼트용 마크(Psf, Pmf; 도 5 참조)를 촬영하여 그 상대적인 위치 어긋남을 조정한다(도 4(g)). 파인 얼라인먼트에 이용하는 카메라(20b)는 고정밀의 위치 맞춤이 가능하도록 협시야각이지만 고해상도인 카메라이다. 제2 얼라인먼트용 마크(Psf, Pmf) 및 이를 촬영하기 위한 카메라(20b)는, 기판(S) 및 마스크(M)의 대략 4 코너부에 해당하는 위치에 설치되고 있다.
파인 얼라인먼트를 행하는 계측 위치는, 기판(S)이 마스크(M)에 충분히 근접한 위치로 설정될 수 있고, 예를 들면, 기판(S)의 최하단부가 마스크(M)에 일부 접촉되는 위치로 설정될 수 있다.
제1 및 제2 얼라인먼트가 모두 완료되고, 기판(S)과 마스크(M)의 상대 위치 어긋남이 임계치 이내로 들어오면, 도 4(h)에 도시한 바와 같이, 정전척 Z 액츄에이터(28)를 하강 구동시켜 정전척(24)에 흡착된 상태의 기판(S)을 마스크(M) 상에 재치시키고, 이어서 정전척(24)에 소정의 전압(ΔV2)을 인가하여 마스크(M)를 기판 측으로 끌어당겨 흡착함으로써, 기판(S)과 마스크(M)를 밀착(합착)시킨다.
이상의 과정을 통해, 기판(M)과 마스크(S) 간의 얼라인먼트 및 합착이 모두 완료되고 나면, 증착원(25)의 셔터를 열어 증착원(25)으로부터 증발된 증착 재료를 마스크를 통해 기판의 성막면 상에 증착한다(도 4(i)).
<정전척(24)으로의 기판 흡착 전압의 인가 및 얼라인먼트 개시 시점의 제어>
본 발명은, 이상 설명한 성막 프로세스에 있어서, 기판(S)과 마스크(M) 간의 상대 위치 어긋남을 조정하기 위한 얼라인먼트(특히, 러프 얼라인먼트로서의 제1 얼라인먼트)를, 정전척(24)에 대한 기판(S)이 흡착이 진행되는 도중에 개시하는 것을 특징으로 한다. 이하, 이를 상세히 설명한다.
도 6은, 정전척(24)에 기판(S)을 흡착시키는 도 4(d)의 세부 공정을 도시한다.
본 실시형태에서는, 도 6에 도시한 바와 같이, 기판(S)의 전체 면이 정전척(24)의 하면에 동시에 흡착되는 것이 아니라 정전척(24)의 제1 변(단변)을 따라 일단으로부터 타단을 향해 순차적으로 흡착이 진행된다.
정전척(24)의 제1 변을 따라 기판(S)이 순차적으로 흡착되도록 하기 위해, 복수의 서브 전극부(241 ~ 249)에 기판 흡착을 위한 제1 전압을 인가하는 순서를 제어할 수도 있고, 복수의 서브 전극부(241 ~ 249)에 동시에 제1 전압을 인가하되, 기판(S)을 지지하는 기판 지지 유닛(22)의 지지부의 구조나 지지력을 달리할 수도 있다.
도 6은 정전척(24)의 복수의 서브 전극부(241 ~ 249)에 인가되는 전압의 제어를 통해, 기판(S)을 정전척(24)에 순차적으로 흡착시키는 실시형태를 도시한다. 여기에서는, 정전척(24)의 장변 방향(Y방향)을 따라 배치되는 3개의 서브 전극부(241, 244, 247)가 제1 흡착부(①)를 이루고, 정전척(24)의 중앙부의 3개의 서브 전극부(242, 245, 248)가 제2 흡착부(②)를 이루며, 나머지 3개의 서브 전극부(243, 246, 249)가 제3 흡착부(③)를 이루는 것을 전제로 설명한다.
성막 장치(11)의 진공 용기(21) 내로 기판(S)이 반입되어 기판 지지 유닛(22)의 지지부에 재치되고, 정전척(24)이 기판(S)에 충분히 근접 내지 접촉하는 위치까지 하강하게 되면, 전압 제어부(32)는, 정전척(24)의 제1 변(단변)을 따라 제1 흡착부(①)로부터 제3 흡착부(③)를 향해 순차적으로 기판 흡착 전압(제1 전압; ΔV1)이 인가되도록 제어한다.
즉, 제1 흡착부(①)에 먼저 제1 전압(ΔV1)이 인가되고(도 6a), 이어서, 제2 흡착부(②)에 제1 전압(ΔV1)이 인가되며(도 6b), 마지막으로 제3 흡착부(③)에 제1 전압(ΔV1)이 인가되도록 제어한다(도 6c).
제1 전압(ΔV1)은 기판(S)을 정전척(24)에 확실히 흡착시키기 위해 충분한 크기의 전압으로 설정된다.
이에 의해, 기판(S)의 정전척(24)에의 흡착은, 기판(S)의 제1 흡착부(①)에 대응하는 한쪽 장변측에서부터 흡착이 개시되어, 기판(S)의 중앙부를 지나, 제3 흡착부(③)에 대응하는 다른쪽 장변측을 향해 흡착이 진행된다.
도 6의 각 우측 도면은, 이상의 각 전압 인가 단계에서의 기판(S) 흡착 상태를 개념적으로 도시한 상면도(정전척(24)측에서 본 상면도)이다. 각 단계에서의 기판 흡착 영역을 사선으로 도시하고 있다.
이와 같은 흡착 방식에 의해, 기판(S)은 중앙부에 주름을 남기지 않고 평탄하게 정전척(24)에 흡착될 수 있다. 본 발명은, 이와 같이, 주름 방지를 위해 기판(S)을 일변측에서부터 타변측을 향해 순차적으로 정전척(24)에 흡착시킴에 있어, 흡착이 도중까지 진행된 시점에서, 기판(S)과 마스크(M) 간의 상대 위치 어긋남을 조정하기 위한 얼라인먼트를 개시한다. 즉, 기판(S)의 중앙부에 해당하는 제2 흡착부(②) 영역까지 흡착이 진행된 도 6(b)의 시점에서, 도 4(e)에서 설명한 기판(S)과 마스크(M) 간의 러프 얼라인먼트를 개시하는 것을 특징으로 한다.
전술한 바와 같이, 기판 상에 형성된 얼라인먼트 마크 중 러프 얼라인먼트 시 이용되는 제1 얼라인먼트용 마크(Psr)와 이를 촬영하기 위한 카메라(20a)는, 기판(S)의 대략 단변 중앙에 대응하는 위치에 설치되어 있으므로. 기판(S)의 중앙부에 해당하는 제2 흡착부(②) 영역까지 흡착이 진행된 도 6(b)의 시점에서는, 러프 얼라인먼트 시 필요한 기판(S) 상의 제1 얼라인먼트용 마크(Psr)의 위치가 고정되고, 이후 나머지 흡착 진행 중에 해당 위치는 변하지 않는다. 따라서, 얼라인먼트 마크(Psr)가 흡착을 통해 위치 고정되는 도 6(b)의 시점에서 러프 얼라인먼트의 동작을 개시하게 되면, 얼라인먼트의 정확도는 저하시키지 않으면서도 얼라인먼트의 개시 시기를 앞당길 수 있다. 따라서, 보다 빠른 시간 내에 성막 공정으로 진행할 수 있고, 장치의 전체적인 공정 시간(Tact time)을 줄일 수 있게 된다.
요컨대, 정전척(24)에 기판(S)의 전체 면이 완전히 흡착되고 난 뒤에 기판(S)과 마스크(M)의 얼라인먼트를 행하는 통상적인 인식에서 벗어나, 본 발명에서는, 정전척(24)에 대한 기판(S)의 흡착이 소정 방향을 따라 순차적으로 행해지도록 제어하면서 그 흡착 진행 방향과 기판 상에 형성된 얼라인먼트 마크의 형성 위치와의 상호 관계를 이용하여, 정전척(24)으로의 흡착이 진행되는 도중에 얼라인먼트를 개시하는 것을 특징으로 하고 있다.
한편, 이와 같이 하여, 기판(S)의 중앙부에 해당하는 제2 흡착부(②) 영역까지 흡착이 진행된 도 6(b)의 시점에서 러프 얼라인먼트가 개시되고 나면, 해당 러프 얼라인먼트와 그에 이은 전술한 파인 얼라인먼트가, 기판(S)의 나머지 영역으로의 흡착이 진행됨과 함께 순차로 행해진다. 러프 얼라인먼트가 완료된 뒤 행해지는 파인 얼라인먼트의 개시 시기는 특히 제한되지 않으나, 파인 얼라인먼트용 마크(Psf)를 기판의 4 코너부에 형성하고, 정전척(24)에 대한 기판 흡착은 기판(S)의 일변측에서 타변측을 향해 순차 흡착시키는 방식의 본 실시형태에 있어서는, 파인 얼라인먼트는 전술한 제3 흡착부(③)에 대응하는 다른쪽 장변측까지 기판(S)이 흡착이 진행된 뒤에 개시하는 것이 바람직할 수 있다.
<전자 디바이스의 제조 방법>
다음으로, 본 실시형태의 성막 장치를 이용한 전자 디바이스의 제조 방법의 일례를 설명한다. 이하, 전자 디바이스의 예로서 유기 EL 표시장치의 구성 및 제조 방법을 예시한다.
우선, 제조하는 유기 EL 표시장치에 대해 설명한다. 도 7(a)는 유기 EL 표시장치(60)의 전체도, 도 7(b)는 1 화소의 단면 구조를 나타내고 있다.
도 7(a)에 도시한 바와 같이, 유기 EL 표시장치(60)의 표시 영역(61)에는 발광소자를 복수 구비한 화소(62)가 매트릭스 형태로 복수 개 배치되어 있다. 상세 내용은 후술하지만, 발광소자의 각각은 한 쌍의 전극에 끼워진 유기층을 구비한 구조를 가지고 있다. 또한, 여기서 말하는 화소란 표시 영역(61)에 있어서 소망의 색 표시를 가능하게 하는 최소 단위를 지칭한다. 본 실시예에 관한 유기 EL 표시장치의 경우, 서로 다른 발광을 나타내는 제1 발광소자(62R), 제2 발광소자(62G), 제3 발광소자(62B)의 조합에 의해 화소(62)가 구성되어 있다. 화소(62)는 적색 발광소자, 녹색 발광소자, 청색 발광소자의 조합으로 구성되는 경우가 많지만, 황색 발광소자, 시안 발광소자, 백색 발광소자의 조합이어도 되며, 적어도 1 색 이상이면 특히 제한되는 것은 아니다.
도 7(b)는 도 7(a)의 A-B선에 있어서의 부분 단면 모식도이다. 화소(62)는 기판(63) 상에 양극(64), 정공 수송층(65), 발광층(66R, 66G, 66B), 전자 수송층(67), 음극(68)을 구비한 유기 EL 소자를 가지고 있다. 이들 중 정공 수송층(65), 발광층(66R, 66G, 66B), 전자 수송층(67)이 유기층에 해당한다. 또한, 본 실시형태에서는, 발광층(66R)은 적색을 발하는 유기 EL 층, 발광층(66G)는 녹색을 발하는 유기 EL 층, 발광층(66B)는 청색을 발하는 유기 EL 층이다. 발광층(66R, 66G, 66B)은 각각 적색, 녹색, 청색을 발하는 발광소자(유기 EL 소자라고 부르는 경우도 있음)에 대응하는 패턴으로 형성되어 있다. 또한, 양극(64)은 발광소자별로 분리되어 형성되어 있다. 정공 수송층(65)과 전자 수송층(67)과 음극(68)은, 복수의 발광소자(62R, 62G, 62B)와 공통으로 형성되어 있어도 좋고, 발광소자별로 형성되어 있어도 좋다. 또한, 양극(64)과 음극(68)이 이물에 의해 단락되는 것을 방지하기 위하여, 양극(64) 사이에 절연층(69)이 설치되어 있다. 또한, 유기 EL 층은 수분이나 산소에 의해 열화되기 때문에, 수분이나 산소로부터 유기 EL 소자를 보호하기 위한 보호층(70)이 설치되어 있다.
도 7(b)에서는 정공수송층(65)이나 전자 수송층(67)이 하나의 층으로 도시되었으나, 유기 EL 표시 소자의 구조에 따라서, 정공블록층이나 전자블록층을 포함하는 복수의 층으로 형성될 수도 있다. 또한, 양극(64)과 정공수송층(65) 사이에는 양극(64)으로부터 정공수송층(65)으로의 정공의 주입이 원활하게 이루어지도록 할 수 있는 에너지밴드 구조를 가지는 정공주입층을 형성할 수도 있다. 마찬가지로, 음극(68)과 전자수송층(67) 사이에도 전자주입층이 형성될 수 있다.
다음으로, 유기 EL 표시장치의 제조 방법의 예에 대하여 구체적으로 설명한다.
우선, 유기 EL 표시장치를 구동하기 위한 회로(미도시) 및 양극(64)이 형성된 기판(63)을 준비한다.
양극(64)이 형성된 기판(63) 위에 아크릴 수지를 스핀 코트로 형성하고, 아크릴 수지를 리소그래피 법에 의해 양극(64)이 형성된 부분에 개구가 형성되도록 패터닝하여 절연층(69)을 형성한다. 이 개구부가 발광소자가 실제로 발광하는 발광 영역에 상당한다.
절연층(69)이 패터닝된 기판(63)을 제1 유기재료 성막 장치에 반입하여 기판 보유 지지 유닛 및 정전척으로 기판을 보유 지지하고, 정공 수송층(65)을 표시 영역의 양극(64) 위에 공통층으로서 성막한다. 정공 수송층(65)은 진공 증착에 의해 성막된다. 실제로는 정공 수송층(65)은 표시 영역(61)보다 큰 사이즈로 형성되기 때문에, 고정밀의 마스크는 필요치 않다.
다음으로, 정공 수송층(65)까지 형성된 기판(63)을 제2 유기재료 성막 장치에 반입하고, 기판 보유 지지 유닛 및 정전척으로 보유 지지한다. 기판과 마스크의 얼라인먼트를 행하고, 기판을 마스크 상에 재치하여, 기판(63)의 적색을 발하는 소자를 배치하는 부분에 적색을 발하는 발광층(66R)을 성막한다.
발광층(66R)의 성막과 마찬가지로, 제3 유기재료 성막 장치에 의해 녹색을 발하는 발광층(66G)을 성막하고, 나아가 제4 유기재료 성막 장치에 의해 청색을 발하는 발광층(66B)을 성막한다. 발광층(66R, 66G, 66B)의 성막이 완료된 후, 제5 유기재료 성막 장치에 의해 표시 영역(61)의 전체에 전자 수송층(67)을 성막한다. 전자 수송층(67)은 3 색의 발광층(66R, 66G, 66B)에 공통의 층으로서 형성된다.
전자 수송층(67)까지 형성된 기판을 금속성 증착재료 성막 장치로 이동시켜 음극(68)을 성막한다.
본 발명에 따르면, 이러한 유기 EL 표시 소자의 각 유기층 또는 금속성 전극층을 성막함에 있어, 성막 대상인 기판(S)과 마스크(M) 간의 얼라인먼트를 정전척(24)에 대한 기판(S)의 흡착이 진행되는 도중에 개시함으로써, 보다 빠른 시간 내에 성막 공정으로 진행할 수 있고, 장치의 전체적인 공정 시간(Tact time)을 줄일 수 있게 된다.
그 후 플라스마 CVD 장치로 이동시켜 보호층(70)을 성막하여, 유기 EL 표시장치(60)를 완성한다.
절연층(69)이 패터닝 된 기판(63)을 성막 장치로 반입하고 나서부터 보호층(70)의 성막이 완료될 때까지는, 수분이나 산소를 포함하는 분위기에 노출되면 유기 EL 재료로 이루어진 발광층이 수분이나 산소에 의해 열화될 우려가 있다. 따라서, 본 예에 있어서, 성막 장치 간의 기판의 반입, 반출은 진공 분위기 또는 불활성 가스 분위기 하에서 행하여진다.
상기 실시예는 본 발명의 일 예를 나타낸 것으로, 본 발명은 상기 실시예의 구성에 한정되지 않으며, 그 기술사상의 범위내에서 적절히 변형하여도 된다.
11: 성막 장치
20a, 20b: 얼라인먼트용 카메라
Psr, Pmr, Psf, Pmf: 얼라인먼트 마크
22: 기판 지지 유닛
23: 마스크 지지 유닛
24: 정전척
20a, 20b: 얼라인먼트용 카메라
Psr, Pmr, Psf, Pmf: 얼라인먼트 마크
22: 기판 지지 유닛
23: 마스크 지지 유닛
24: 정전척
Claims (23)
- 정전척을 이용한 피흡착체의 흡착 및 얼라인먼트 방법으로서,
상기 정전척에 의해 제1 피흡착체를 흡착하는 단계와,
상기 정전척에 의해 흡착된 상기 제1 피흡착체와, 제2 피흡착체 간의 상대 위치 어긋남을 조정하는 얼라인먼트 단계와,
상기 제1 피흡착체에 대해 상대 위치 어긋남이 조정된 상기 제2 피흡착체를, 상기 정전척에 의해 상기 제1 피흡착체를 거쳐 흡착하는 단계를 포함하고,
상기 얼라인먼트 단계는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 진행되는 도중에 개시하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제1항에 있어서,
상기 제1 피흡착체를 흡착하는 단계에서는, 상기 제1 피흡착체의 일 영역에서부터 대향하는 타 영역을 향해 순차적으로 상기 제1 피흡착체를 상기 정전척에 흡착시키고,
상기 정전척에 의한 상기 제1 피흡착체의 흡착이, 상기 일 영역에서부터 대향하는 타 영역을 향하는 흡착 진행 방향을 따라 상기 제1 피흡착체의 중앙부 영역까지 진행된 시점에서 상기 얼라인먼트 단계를 개시하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제2항에 있어서,
상기 제1 피흡착체를 흡착하는 단계에서는, 상기 제1 피흡착체의 일변에서부터 대향하는 타변을 향해 순차적으로 상기 제1 피흡착체를 상기 정전척에 흡착시키고,
상기 정전척에 의한 상기 제1 피흡착체의 흡착이, 상기 일변에서부터 대향하는 타변을 향하는 흡착 진행 방향을 따라 상기 제1 피흡착체의 중앙부 영역까지 진행된 시점에서 상기 얼라인먼트 단계를 개시하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제3항에 있어서,
상기 얼라인먼트는, 상기 제1 피흡착체와 상기 제2 피흡착체 간의 대략적 위치 맞춤을 행하는 제1 얼라인먼트와, 상기 제1 얼라인먼트 보다 높은 정밀도로 상기 제1 피흡착체와 상기 제2 피흡착체 간의 위치 맞춤을 행하는 제2 얼라인먼트를 포함하고,
상기 정전척에 의한 상기 제1 피흡착체의 흡착이 진행되는 도중에 상기 제1 얼라인먼트를 개시하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제4항에 있어서,
상기 제1 얼라인먼트는 상기 제1 피흡착체와 상기 제2 피흡착체가 이격된 상태에서 행하고, 상기 제2 얼라인먼트는 상기 제1 얼라인먼트보다 상기 제1 피흡착체와 상기 제2 피흡착체가 근접된 상태에서 행하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제4항에 있어서,
상기 제1 얼라인먼트는 상기 제1 피흡착체와 상기 제2 피흡착체의 각각의 단변 중앙 부근에 형성된 각각의 제1 얼라인먼트용 마크를 촬영한 화상에 기초하여 행하고,
상기 정전척에 의한 상기 제1 피흡착체의 흡착이, 상기 제1 피흡착체의 상기 제1 얼라인먼트용 마크 형성 영역까지 진행된 시점에서 상기 제1 얼라인먼트를 개시하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제4항에 있어서,
상기 제2 얼라인먼트는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 완료된 이후 개시하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제7항에 있어서,
상기 제2 얼라인먼트는 상기 제1 피흡착체와 상기 제2 피흡착체의 각각의 네 코너부 부근에 형성된 각각의 제2 얼라인먼트용 마크를 촬영한 화상에 기초하여 행하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제3항에 있어서,
상기 제1 피흡착체를 흡착하는 단계 이전에, 상기 정전척과 상기 제1 피흡착체 간의 상대 위치 어긋남을 조정하는 위치 조정 단계를 더 포함하는 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 제3항에 있어서,
상기 제1 피흡착체는 기판이고, 상기 제2 피흡착체는 상기 기판에 성막될 성막 패턴에 대응하는 개구를 갖는 마스크인 것을 특징으로 하는 흡착 및 얼라인먼트 방법. - 기판에 마스크를 거쳐서 증착 재료를 성막하는 방법으로서,
성막 장치 내로 마스크를 반입하는 단계와,
성막 장치 내로 기판을 반입하는 단계와,
제1항 내지 제10항 중 어느 한 항에 기재된 흡착 및 얼라인먼트 방법을 사용하여, 상기 정전척에, 제1 피흡착체로서의 상기 기판과, 제2 피흡착체로서의 상기 마스크를, 상호 간의 상대 위치 어긋남을 조정하여 흡착하는 단계와,
상기 정전척에 상기 기판과 상기 마스크가 흡착된 상태에서, 증착 재료를 증발시켜 상기 마스크를 통해 상기 기판에 증착 재료를 성막하는 단계를 포함하는 것을 특징으로 하는 성막 방법. - 제11항의 성막 방법을 사용하여 전자 디바이스를 제조하는 것을 특징으로 하는 전자 디바이스의 제조 방법.
- 제1 피흡착체와, 상기 제1 피흡착체를 거쳐 제2 피흡착체를 흡착하기 위한 흡착 시스템으로서,
전극부를 포함하고, 상기 전극부에 인가되는 전압 제어를 통해, 상기 제1 피흡착체, 및 상기 제1 피흡착체를 거쳐 상기 제2 피흡착체를 흡착하는 정전척과,
제어부와,
상기 제1 피흡착체와 상기 제2 피흡착체 간의 상대 위치 어긋남을 조정하는 얼라인먼트를 위한 위치 조정 기구를 포함하고,
상기 제어부는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 진행되는 도중에 상기 제1 피흡착체와 상기 제2 피흡착체 간의 상대 위치 어긋남 조정을 위한 상기 얼라인먼트를 개시하도록 상기 위치 조정 기구를 제어하는 것을 특징으로 하는 흡착 시스템. - 제13항에 있어서,
상기 제어부는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착 시, 상기 제1 피흡착체의 일 영역에서부터 대향하는 타 영역을 향해 순차적으로 상기 제1 피흡착체가 상기 정전척에 흡착되도록 제어하고, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 상기 일 영역에서부터 대향하는 타 영역을 향하는 흡착 진행 방향을 따라 상기 제1 피흡착체의 중앙부 영역까지 진행된 시점에서 상기 얼라인먼트가 개시되도록 상기 위치 조정 기구를 제어하는 것을 특징으로 하는 흡착 시스템. - 제14항에 있어서,
상기 제어부는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착 시, 상기 제1 피흡착체의 일변에서부터 대향하는 타변을 향해 순차적으로 상기 제1 피흡착체가 상기 정전척에 흡착되도록 제어하고, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 상기 일변에서부터 대향하는 타변을 향하는 흡착 진행 방향을 따라 상기 제1 피흡착체의 중앙부 영역까지 진행된 시점에서 상기 얼라인먼트가 개시되도록 상기 위치 조정 기구를 제어하는 것을 특징으로 하는 흡착 시스템. - 제15항에 있어서,
상기 위치 조정 기구에 의해 행해지는 상기 얼라인먼트는, 상기 제1 피흡착체와 상기 제2 피흡착체 간의 대략적 위치 맞춤을 행하는 제1 얼라인먼트와, 상기 제1 얼라인먼트 보다 높은 정밀도로 상기 제1 피흡착체와 상기 제2 피흡착체 간의 위치 맞춤을 행하는 제2 얼라인먼트를 포함하고,
상기 제어부는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 진행되는 도중에 상기 제1 얼라인먼트를 개시하도록 상기 위치 조정 기구를 제어하는 것을 특징으로 하는 흡착 시스템. - 제16항에 있어서,
상기 제1 얼라인먼트는 상기 제1 피흡착체와 상기 제2 피흡착체가 이격된 상태에서 행해지고, 상기 제2 얼라인먼트는 상기 제1 얼라인먼트 시보다 상기 제1 피흡착체와 상기 제2 피흡착체가 근접된 상태에서 행해지는 것을 특징으로 하는 흡착 시스템. - 제16항에 있어서,
상기 제1 얼라인먼트는 상기 제1 피흡착체와 상기 제2 피흡착체의 각각의 단변 중앙 부근에 형성된 각각의 제1 얼라인먼트용 마크를 촬영한 화상에 기초하여 행해지고,
상기 제어부는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 상기 제1 피흡착체의 상기 제1 얼라인먼트용 마크 형성 영역까지 진행된 시점에서 상기 제1 얼라인먼트를 개시하도록 상기 위치 조정 기구를 제어하는 것을 특징으로 하는 흡착 시스템. - 제16항에 있어서,
상기 제어부는, 상기 정전척에 의한 상기 제1 피흡착체의 흡착이 완료된 이후 상기 제2 얼라인먼트를 개시하도록 상기 위치 조정 기구를 제어하는 것을 특징으로 하는 흡착 시스템. - 제19항에 있어서,
상기 제2 얼라인먼트는 상기 제1 피흡착체와 상기 제2 피흡착체의 각각의 네 코너부 부근에 형성된 각각의 제2 얼라인먼트용 마크를 촬영한 화상에 기초하여 행해지는 것을 특징으로 하는 흡착 시스템. - 제15항에 있어서,
상기 제어부는, 상기 정전척에 의해 상기 제1 피흡착체를 흡착하기 이전에, 상기 정전척과 상기 제1 피흡착체 간의 상대 위치 어긋남을 조정하도록 상기 위치 조정 기구를 더 제어하는 것을 특징으로 하는 흡착 시스템. - 제15항에 있어서,
상기 제1 피흡착체는 기판이고, 상기 제2 피흡착체는 상기 기판에 성막될 성막 패턴에 대응하는 개구를 갖는 마스크인 것을 특징으로 하는 흡착 시스템. - 기판에 마스크를 거쳐서 성막을 행하기 위한 성막 장치로서,
제1 피흡착체인 기판과 제2 피흡착체인 마스크를 흡착하기 위한 흡착 시스템을 포함하며,
상기 흡착 시스템은 제13항 내지 제22항 중 어느 한 항에 기재된 흡착 시스템인 것을 특징으로 하는 성막 장치.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180132427A KR102550586B1 (ko) | 2018-10-31 | 2018-10-31 | 흡착 및 얼라인먼트 방법, 흡착 시스템, 성막 방법, 성막 장치 및 전자 디바이스의 제조 방법 |
| CN201910478783.7A CN111128828B (zh) | 2018-10-31 | 2019-06-04 | 吸附及对准方法、吸附系统、成膜方法及装置、电子器件的制造方法 |
| JP2019198514A JP7190997B2 (ja) | 2018-10-31 | 2019-10-31 | 吸着及びアライメント方法、吸着システム、成膜方法、成膜装置及び電子デバイスの製造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180132427A KR102550586B1 (ko) | 2018-10-31 | 2018-10-31 | 흡착 및 얼라인먼트 방법, 흡착 시스템, 성막 방법, 성막 장치 및 전자 디바이스의 제조 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200049314A true KR20200049314A (ko) | 2020-05-08 |
| KR102550586B1 KR102550586B1 (ko) | 2023-06-30 |
Family
ID=70496012
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180132427A KR102550586B1 (ko) | 2018-10-31 | 2018-10-31 | 흡착 및 얼라인먼트 방법, 흡착 시스템, 성막 방법, 성막 장치 및 전자 디바이스의 제조 방법 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7190997B2 (ko) |
| KR (1) | KR102550586B1 (ko) |
| CN (1) | CN111128828B (ko) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210145893A (ko) * | 2020-05-25 | 2021-12-03 | 삼성디스플레이 주식회사 | 디스플레이 장치 제조방법 및 제조장치 |
| CN112017999B (zh) * | 2020-07-31 | 2022-11-04 | 中国科学院微电子研究所 | 晶圆清洗设备及晶圆清洗方法 |
| JP2022038099A (ja) * | 2020-08-26 | 2022-03-10 | キヤノントッキ株式会社 | アライメント装置およびアライメント方法、ならびに成膜装置および成膜方法 |
| JP7347386B2 (ja) * | 2020-09-25 | 2023-09-20 | 株式会社村田製作所 | 静電誘導吸着式搬送体および静電誘導吸着式搬送装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070010723A (ko) | 2005-07-19 | 2007-01-24 | 주성엔지니어링(주) | 섀도우 마스크와 이를 이용한 정렬장치 |
| JP2014065959A (ja) * | 2012-09-27 | 2014-04-17 | Hitachi High-Technologies Corp | 蒸着装置、および、蒸着装置における基板設置方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004183044A (ja) | 2002-12-03 | 2004-07-02 | Seiko Epson Corp | マスク蒸着方法及び装置、マスク及びマスクの製造方法、表示パネル製造装置、表示パネル並びに電子機器 |
| JP4583905B2 (ja) * | 2004-12-17 | 2010-11-17 | 筑波精工株式会社 | アライメント装置及びそれを用いたアライメント方法 |
| CN101316777B (zh) * | 2006-09-29 | 2012-01-18 | 信越工程株式会社 | 工件移送方法和静电吸盘装置以及基板粘贴方法 |
| JP4620766B2 (ja) * | 2008-07-31 | 2011-01-26 | 東京エレクトロン株式会社 | はがし装置及びはがし方法 |
| JP2011195907A (ja) | 2010-03-19 | 2011-10-06 | Tokyo Electron Ltd | マスク保持装置及び薄膜形成装置 |
| JP6010433B2 (ja) * | 2012-11-15 | 2016-10-19 | 東京エレクトロン株式会社 | 基板載置台および基板処理装置 |
| CN104051495B (zh) * | 2014-05-28 | 2017-02-15 | 京东方科技集团股份有限公司 | 封装装置和封装设备 |
| JP2017212255A (ja) * | 2016-05-23 | 2017-11-30 | 株式会社ジェイデバイス | 半導体製造装置及び製造方法 |
| JP6876520B2 (ja) * | 2016-06-24 | 2021-05-26 | キヤノントッキ株式会社 | 基板の挟持方法、基板の挟持装置、成膜方法、成膜装置、及び電子デバイスの製造方法、基板載置方法、アライメント方法、基板載置装置 |
-
2018
- 2018-10-31 KR KR1020180132427A patent/KR102550586B1/ko active IP Right Grant
-
2019
- 2019-06-04 CN CN201910478783.7A patent/CN111128828B/zh active Active
- 2019-10-31 JP JP2019198514A patent/JP7190997B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070010723A (ko) | 2005-07-19 | 2007-01-24 | 주성엔지니어링(주) | 섀도우 마스크와 이를 이용한 정렬장치 |
| JP2014065959A (ja) * | 2012-09-27 | 2014-04-17 | Hitachi High-Technologies Corp | 蒸着装置、および、蒸着装置における基板設置方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111128828A (zh) | 2020-05-08 |
| CN111128828B (zh) | 2023-07-04 |
| JP2020072273A (ja) | 2020-05-07 |
| JP7190997B2 (ja) | 2022-12-16 |
| KR102550586B1 (ko) | 2023-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200049034A (ko) | 얼라인먼트 시스템, 성막 장치, 얼라인먼트 방법, 성막 방법 및 전자 디바이스의 제조 방법 | |
| KR102550586B1 (ko) | 흡착 및 얼라인먼트 방법, 흡착 시스템, 성막 방법, 성막 장치 및 전자 디바이스의 제조 방법 | |
| KR102427823B1 (ko) | 정전척 시스템, 성막장치, 흡착방법, 성막방법 및 전자 디바이스의 제조방법 | |
| KR102505832B1 (ko) | 흡착장치, 위치 조정 방법, 및 성막 방법 | |
| KR102590797B1 (ko) | 흡착 시스템, 흡착 방법, 및 이를 이용한 성막 장치, 성막 방법, 전자 디바이스의 제조 방법 | |
| KR102620156B1 (ko) | 밀착도 확인 장치, 밀착도 확인 방법, 및 이를 이용한 성막 장치, 성막 방법, 전자 디바이스의 제조방법 | |
| KR102501609B1 (ko) | 성막 장치, 이를 사용한 성막 방법, 및 전자 디바이스의 제조방법 | |
| KR102459872B1 (ko) | 정전척 시스템, 성막 장치, 흡착 방법, 성막 방법 및 전자 디바이스의 제조방법 | |
| KR20200049379A (ko) | 얼라인먼트 장치, 성막장치, 얼라인먼트 방법, 성막방법, 및 전자 디바이스 제조방법 | |
| JP7078694B2 (ja) | 成膜装置、成膜方法及び電子デバイスの製造方法 | |
| KR102501617B1 (ko) | 성막 장치, 성막 방법, 및 전자 디바이스의 제조방법 | |
| KR20200049357A (ko) | 흡착 및 얼라인먼트 방법, 흡착 시스템, 성막 방법, 성막 장치 및 전자 디바이스의 제조 방법 | |
| KR102520050B1 (ko) | 흡착 장치, 성막장치, 흡착방법, 성막방법 및 전자 디바이스의 제조방법 | |
| KR102421610B1 (ko) | 정전척 시스템, 성막 장치, 흡착 방법, 성막 방법 및 전자 디바이스의 제조방법 | |
| KR102430370B1 (ko) | 정전척 시스템, 성막장치, 흡착방법, 성막방법 및 전자 디바이스의 제조방법 | |
| KR102419064B1 (ko) | 정전척 시스템, 성막장치, 흡착방법, 성막방법 및 전자 디바이스의 제조방법 | |
| KR20200034455A (ko) | 정전척 시스템, 성막 장치, 피흡착체 분리방법, 성막 방법 및 전자 디바이스의 제조방법 | |
| KR20200048840A (ko) | 정전척 시스템, 성막장치, 흡착방법, 성막방법 및 전자 디바이스의 제조방법 | |
| KR102129435B1 (ko) | 정전척 시스템, 성막장치, 흡착방법, 성막방법 및 전자 디바이스의 제조방법 | |
| KR102481907B1 (ko) | 성막 장치, 성막 방법, 및 전자 디바이스의 제조방법 | |
| KR102411995B1 (ko) | 정전척 시스템, 성막장치, 흡착 및 분리방법, 성막방법 및 전자 디바이스의 제조방법 | |
| JP7078696B2 (ja) | 成膜装置、成膜方法及び電子デバイスの製造方法 | |
| KR20200034614A (ko) | 정전척 시스템, 성막 장치, 피흡착체 분리방법, 성막 방법 및 전자 디바이스의 제조방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |