KR20170137736A - 궤도 추적 센서 네트워크를 구비한 새로운 지능형 선별기 및 그 방법 - Google Patents
궤도 추적 센서 네트워크를 구비한 새로운 지능형 선별기 및 그 방법 Download PDFInfo
- Publication number
- KR20170137736A KR20170137736A KR1020177028264A KR20177028264A KR20170137736A KR 20170137736 A KR20170137736 A KR 20170137736A KR 1020177028264 A KR1020177028264 A KR 1020177028264A KR 20177028264 A KR20177028264 A KR 20177028264A KR 20170137736 A KR20170137736 A KR 20170137736A
- Authority
- KR
- South Korea
- Prior art keywords
- conduit
- controller
- ejector
- objects
- sensor
- Prior art date
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/36—Sorting apparatus characterised by the means used for distribution
- B07C5/363—Sorting apparatus characterised by the means used for distribution by means of air
- B07C5/365—Sorting apparatus characterised by the means used for distribution by means of air using a single separation means
- B07C5/366—Sorting apparatus characterised by the means used for distribution by means of air using a single separation means during free fall of the articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/04—Sorting according to size
- B07C5/10—Sorting according to size measured by light-responsive means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/34—Sorting according to other particular properties
- B07C5/342—Sorting according to other particular properties according to optical properties, e.g. colour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/36—Sorting apparatus characterised by the means used for distribution
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/36—Sorting apparatus characterised by the means used for distribution
- B07C5/361—Processing or control devices therefor, e.g. escort memory
- B07C5/362—Separating or distributor mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/36—Sorting apparatus characterised by the means used for distribution
- B07C5/363—Sorting apparatus characterised by the means used for distribution by means of air
- B07C5/367—Sorting apparatus characterised by the means used for distribution by means of air using a plurality of separation means
- B07C5/368—Sorting apparatus characterised by the means used for distribution by means of air using a plurality of separation means actuated independently
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/36—Sorting apparatus characterised by the means used for distribution
- B07C5/38—Collecting or arranging articles in groups
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C2501/00—Sorting according to a characteristic or feature of the articles or material to be sorted
- B07C2501/0018—Sorting the articles during free fall
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C2501/00—Sorting according to a characteristic or feature of the articles or material to be sorted
- B07C2501/0081—Sorting of food items
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C2501/00—Sorting according to a characteristic or feature of the articles or material to be sorted
- B07C2501/009—Sorting of fruit
Abstract
본 발명은 물체의 궤적을 연속적으로 추적함으로써 단일 경로에서 복수의 등급으로 크기, 모양, 색상, 질감, 표면 특성 또는 기타 가능한 외부 특성에 기초하여 물체를 선별하기 위한 궤적 추적 센서 네트워크를 갖는 새로운 지능형 및 멀티채널 선별기를 개시한다. 상기 새로운 선별기는 호퍼; 적어도 하나의 공급 유닛; 복수의 광학 유닛; 복수의 도관; 복수의 도관 내에 복수의 센서 네트워크; 단일 각이 있는 또는 다중 각이 있는 이젝터의 배열을 포함하는 적어도 하나의 이젝터 유닛; 각각의 이젝터에 반대방향으로 각각 위치하는 복수의 진공 생성기; 복수의 수집 슈트; 복수의 수집 위치를 포함한다. 새로운 선별기는 매우 간단하고 정확하며 자동화되어 있고 전력 효율적이고 비용 효율적이다. 본 발명은 또한 외부 특성에 기초하여 물체의 궤적을 연속적으로 추적함으로써 물체를 단일 경로에서 복수의 등급으로 선별하기 위한 새로운 방법을 개시한다.
Description
본 발명은 일반적으로, 상이한 특성의 물체를 선별(grading)하기 위한 선별기 및 선별 방법에 관한 것이다. 보다 상세하게는, 물체의 선별을 위하여 궤도 추적 센서 네트워크를 구비한 새로운 지능형 선별기 및 센서 네트워크를 통해 물체의 궤적을 지속적으로 추적함으로써 단일 경로(single pass)에서 물체를 복수의 등급으로 선별하기 위한 새로운 방법에 관한 것이다.
시장 수요에 대응하기 위한 요구는 모든 농산물을 선별하기 위한 가장 큰 필요성을 불러오는 품질 평가에 더 중점을 두어야 한다. 이는 재배자에게 높은 가격을 제공하고 포장, 취급 및 마케팅 시스템의 전반적인 개선을 가져오기 때문이다. 오늘날, 선별 과정은 완전히 기계화되었다. 기계식 선별기는 컬러 센서의 사용 또는 이미지 처리 시스템의 사용 등과 같이 적게 또는 더 많은 변형을 갖는 끝단에 가방을 구비한 체인 컨베이어 벨트로 구성된다.
선별기에서, 선별기는 체인을 통해 더 작거나 더 큰 생산물을 선별하여 선별 공정을 더 간편하게 한다. 통상적으로, 분류 기계는 2진법(binary) 출력을 제공한다. 물체는 호퍼(hopper)에서 넘겨지고 일련의 채널을 따라 슬라이드 된다. 그들은 낙하 동안 자신을 카메라에 노출시키고 상기 카메라는 결점을 판단하고 무엇이든 발견되면 이젝터(ejector)를 작동시키고 짧은 시간 동안 높은 공기 제트를 통과시켜 원하는 물체를 수집 상자로 떨어뜨려서 물건을 선별한다. 이 과정에서 물체가 한 번 떨어지면서 카메라를 지나갈 때, 물체의 정확한 위치를 알 수 없으므로 실시간으로 물체의 위치를 파악하고 다른 특징에 따라 다른 등급으로 내쫓는 일이 지루하다. 종래의 선별기는 다중의 구별 가능한 등급을 얻기 위해 다중 경로가 필요하다.
아래 기술된 바와 같이 상이한 물체의 분류 또는 선별을 기술하는 특허 문헌은 거의 없다. “움직이는 상태에서 나사, 볼트 등과 같은 물체를 검사 및 분류하는 시스템"이라는 제목의 미국 특허 제3,650,397호는 순차적 검출(sequential detection)을 포함하는 나사, 볼트와 같은 나삿니가 있는 물체를 분류하는 시스템을 개시한다. 상기 시스템은 나삿니가 있는 물체만 정렬하고 정렬은 2진법인 것에 단점이 관찰된다. 상기 시스템은 자유 낙하시 물체의 위치에 대하여 어떠한 것도 요구하지 않는다. "블루 베리 분류기"라는 제목의 미국 등록특허 제3,773,172호는 캐리어 또는 입력 컨베이어 장치에 인접하게 배치되고 고압 공기 밸브를 통해 가압 공기 공급원에 연결된 복수의 공기 노즐을 포함하는 배출 시스템을 갖는 물체의 자동 분류 장치를 개시한다. 로직 네트워크는 전자 시스템의 신호를 해석하여 선택된 공기 밸브가 특정 시간에 작동되도록 하며, 그 결과 감지된 과일의 상태에 따라 서로 다른 분류 위치에서 입력 컨베이어 수단으로부터 출력 컨베이어로 과일을 배출하기 위해 분사 기류가 과일이 가득한 컵의 작은 구멍을 통과한다. 상기 개시된 선별기는 배열이 복잡하고, 주로 블루베리 및 사과, 오렌지, 크렌 베리, 포도, 체리와 같은 과일, 및 대략 구의 형태를 가지는 과일 또는 채소를 분류하기 위해 고안된 것이므로 과일이나 야채가 아닌 다른 물건을 제외함으로써 분류 범위를 제한한다. "분별 기계를 위한 슬라이드"라는 제목의 미국 등록특허 제6,814,211호에는 물건의 중력 분류를 위한 슬라이드가 개시되어 있다. 센서를 이용하여 물체의 위치를 해석하고 지연 시간에 따라 이젝터를 사용하여 물체를 저장소로 배출한다. 이 기계는 방출을 위하여 지연 시간을 사용하는데, 이는 시스템의 부정확성 및 비효율성을 초래하는 개방 루프 시스템(open loop system)이기 때문에 물체를 분류하는 동안 다른 요소에 인해 변경될 수 있다. "선별을 위한 생산 흐름 제어 장치"라는 명칭의 미국 등록특허 제7,905,357호는 아몬드, 땅콩 및 쌀알 또는 기타 식품 또는 대체 물질과 같은 작은 물체를 선별하기 위한 이젝터 시스템을 포함하는 제품을 분류하기 위해 중력 슬라이드 분류기에서 사용하기 위한 공급 제어 장치를 개시한다. 이는 경사 표면에서 떨어지는 물체를 감지하고 방출하여 미립자 물질을 제거한다. 이 시스템의 가장 큰 단점은 물체를 허용 가능한 및 허용되지 않는(2진법(binary)) 품목으로만 분류한다는 것이다. "정렬 및 검사 장치용 낙하산"의 제목의 미국 특허 출원 제20100096300호는 허용 가능한 및 허용되지 않는 품목에서 물체를 중력 분류하기 위하여 기울어진 표면의 상이한 부분을 개시한다. 상기 장치의 단점 중 하나는 기울어진 부분의 정렬로 인해 제품 조각이 달라붙어 정확성에 영향을 줄 수 있다. 또 다른 단점은 장치가 물체를 바이너리(binary) 방식으로 허용 가능한 등급과 허용되지 않는 등급으로만 정렬한다는 것이다.
"진공 벨트를 구비한 이송 장치"라는 제목의 PCT 공보 제WO20016000967호는 곡물, 종자와 같은 입자를 3개의 품질 등급으로 분류하는 시스템을 개시한다. 그것은 진공 벨트를 사용하여 하단의 호퍼(hopper)에서 상단에 고정된 카메라로 입자를 운반한다. 상기 시스템의 커다란 허점은 흔히 곡물 또는 종자와 관련된 이물질로 인해 진공 벨트의 구멍이 막혀 효율을 저하하는 것이다. 게다가, 상기 시스템이 3개의 품질 등급으로 입자를 분류하더라도, 2 ~ 3개의 종류 또는 등급보다 복수의 품질 등급을 제공하기 위해서는 여전히 이 분야에서 탐구해야 할 엄청난 영역이 있다.
실제로 이미 알려진 전형적인 분류 또는 선별 시스템은 기계가 제공하는 종류나 등급 수의 제한 및 움직이는 물체의 정확한 위치 추적과 하나의 품질 등급을 놓치지 않고 품질 등급을 얻기 위해 특정한 특징을 가진 물체에 분사하는 이젝터(ejector)의 작용 사이에서의 조정(co-ordination)의 부족으로 인해 효율성이 떨어진다.
따라서, 단일 경로에서 연속적으로 궤도를 추적함으로써 여러 유형의 물체를 다양한 상업 등급으로 선별하기 위한 간단하고, 더 효율적이며, 보다 정확하고 비용 효율적인 선별기를 제공함으로써, 상기 언급한 문제를 해결하기 위한 강한 요구가 생긴다. 또한 그러한 물체를 쉽고, 단순하며, 시간 효율적인 방식으로 여러 상업 등급으로 선별하기 위한 새로운 방법을 제공하는 것이 바람직할 것이다.
본 발명은 기존의 분류 및 선별기 및 선별 방법의 다양한 단점 및 흠결을 인식하고 해결하여, 선별 공정의 효율성을 대폭 향상시킨 새로운 선별기를 제공하고 다양한 물체를 여러 등급으로 정확하게 선별하기 위한 새로운 방법에 관한 것으로, 상당한 시간과 노동력을 절약할 수 있다.
본 발명의 일 양태에 따르면, 본 발명은 물체의 궤적을 연속적으로 추적함으로써 단일 경로에서 물체를 외부 또는 물리적 특성에 기초하여 다양한 등급으로 분류하기 위한 궤적 추적 센서 네트워크를 구비한 새로운 지능형 및 멀티채널 선별기를 개시한다. 새로운 선별기는 적어도 하나의 호퍼(hopper); 복수의 공급기(feeder) 및 복수의 공급기 제어기를 포함하는 적어도 하나의 공급 유닛(feeding unit); 복수의 광학 유닛(optics unit), 각각의 광학 유닛은 복수의 카메라 및 복수의 광원을 포함하며; 복수의 도관(conduit); 복수의 센서 네트워크, 단일 센서 네트워크가 단일 도관에 할당되고 그것은 단일 도관 전체에 걸쳐 배열된 복수의 센서층, 복수의 센서층 제어기 및 단일 도관의 모든 센서층 제어기를 제어하기 위한 적어도 하나의 네트워크 제어기를 포함하며; 각각의 도관 내에 단일 각이 있는(angled)의 배열 또는 다중 각이 있는 이젝터(ejector)의 배열을 포함하는 단일 이젝터 유닛; 복수의 광학 유닛, 복수의 네트워크 제어기로부터의 상이한 신호들을 조정(coordinate)하고, 단일 경로에서 여러 등급을 제공할 목적으로 복수의 도관으로부터 상이한 물체를 배출하기 위한 최종 지시(direction)를 제공하는 마스터 제어기; 더 많은 수집을 위해 선별된 물체를 운반하기 위한 복수의 수집 슈트(chute); 및 여러 개의 등급을 수집하기 위한 복수의 수집 위치를 포함한다. 상기 기기는 용이한 선별을 위하여 각 도관 전체에 걸쳐 각각의 이젝터의 맞은편(opposite)에 배치된 복수의 진공 생성기(creator)를 더 포함한다.
따라서, 본 발명의 주 목적은 센서 네트워크를 이용하여 각각의 물체의 궤적을 연속적으로 추적하고 외관 특성에 기초하여 단일 경로에서 물체를 복수의 등급으로 선별하기 위한 새롭고, 매우 간단하고, 정확하고, 지능적이고, 자동화되고, 멀티 채널 된 선별기를 제공하는 것이고 물체의 정확한 위치가 해당 도관에 어디에 있는지를 명확하게 인식하여 해당 이젝터를 작동(trigger) 시키는 것으로, 본 기계는 특별하다. 선별기는 또한 각 물체의 향상된 분석을 위해 광원과 함께 각 물체의 적어도 6방향 뷰를 캡처하는 복수의 카메라를 사용하여, 상기 선별기는 다른 외부 속성에 따라 마스터 제어기를 사용하여 지능적으로 'n' 수의 등급을 선별할 수 있는 선별 가능성이 매우 크다. 선별기는 종래의 발명의 경우와 같이 효율적인 선별을 얻기 위한 복수 경로(multi-pass)의 공간을 제거할 수 있도록 단일 경로(single pass)에서 복수의 등급을 선별하고, 따라서 선별기는 기존 2 진법(binary) 분류와 달리 단일 경로에서 'n' 수의 등급으로 선별한다.
또한, 상기 선별기는 각 도관 내에서 선별기의 각 도관 전체에 걸쳐 각 등급에서 단일 각이 있는(angled) 또는 다중 각이 있는 이젝터의 그룹으로 위치하는 복수의 이젝터 배열(array)을 포함하는 특수한 이젝터 유닛을 포함한다. 분리된 단일 각이 있는 또는 다중 각이 있는 이젝터는 각각의 등급에 대하여 배치되고, 운반 물체의 정확한 위치, 속도 등을 목표로 하여 물체의 방향으로 고압 유체 또는 고압 공기를 소정의 지속 기간 동안 분사하기 위해 마스터 제어기로부터의 신호에 응답하며, 그에 따라 운반 물체를 대응하는 수집 위치로 배출하고, 또한 상기 기계는 용이하고 효과적인 선별을 위해 각각의 상기 이젝터의 맞은편에 도관 전체에 걸쳐 배치된 진공 생성기를 더 포함한다. 상기 선별기는 최소한의 가동 부품(minimal moving parts)을 가지므로 기계의 전력 효율과 비용 효율성을 높여준다.
본 발명의 다른 양태에 따르면, 본 발명은 해당 도관에서 여러 등급으로 각 등급의 물체를 정확하게 배출하기 위하여 다양한 외부 또는 물리적 특성, 즉 크기, 형상, 색상, 표면 특성 또는 기타 특성을 센서 네트워크로 지속적으로 추적하고 이에 기초하여 물체를 단일 경로에서 복수의 등급으로 선별하기 위한 새로운 방법을 개시한다. 상기 새로운 선별 방법은 선별 물체의 특성을 제한하지 않으면서 모든 종류/다양성/유형의 물체를 효율적으로 선별하므로 농산물 등과 같은 제한된 유형으로 물체의 선별 범위를 제한하지 않고 다양한 물체에 대한 선별 작업 범위가 넓어진다.
본 발명의 다른 목적, 특징 및 이점은 첨부된 도면을 참조하여 읽혀질 때 그 다양한 실시 예의 설명으로부터 가장 잘 이해될 것이고, 첨부된 도면은 실시 예의 목적을 위한 예시적인 도면일 뿐이다.
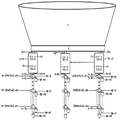
도 1은 본 발명의 일 실시 예에 따른 상이한 외부 특성을 갖는 물체를 선별하기 위한 새로운 지능형 선별기의 정면도이다.
도 2는 본 발명의 일 실시 예에 따른 선별기의 단일 광학 유닛의 등각도(isometric view) 이다.
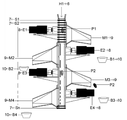
도 3은 본 발명의 일 실시 예에 따른 복수의 센서층, 복수의 이젝터 배열 및 복수의 수집 슈트를 도관 전체에 걸쳐 배열하는 것을 도시한 단일 도관의 정면도이다.
도 4는 본 발명의 일 실시 예에 따른 운반수단으로서 중력을 갖는 관으로서의 도관을 도시하는 단일 도관의 정면도이다.
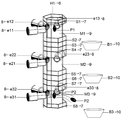
도 5는 본 발명의 일 실시 예에 따른 단일 각도 또는 복수의 각도 기반 이젝터의 배열에 의한 운반 물체의 도관을 통한 각 등급에서의 공통 수집 위치로의 배출을 도시한 도관의 등각도(isometric view)이다.
도 6은 본 발명의 다른 실시 예에 따른 외부 특성에 기초하여 물체의 궤적을 연속적으로 추적함으로써 단일 경로에서 물체를 복수의 등급으로 선별하기 위한 새로운 방법과 관련된 다양한 비 제한적인 단계들을 나타내는 블록도이다.
도 1은 본 발명의 일 실시 예에 따른 상이한 외부 특성을 갖는 물체를 선별하기 위한 새로운 지능형 선별기의 정면도이다.
도 2는 본 발명의 일 실시 예에 따른 선별기의 단일 광학 유닛의 등각도(isometric view) 이다.
도 3은 본 발명의 일 실시 예에 따른 복수의 센서층, 복수의 이젝터 배열 및 복수의 수집 슈트를 도관 전체에 걸쳐 배열하는 것을 도시한 단일 도관의 정면도이다.
도 4는 본 발명의 일 실시 예에 따른 운반수단으로서 중력을 갖는 관으로서의 도관을 도시하는 단일 도관의 정면도이다.
도 5는 본 발명의 일 실시 예에 따른 단일 각도 또는 복수의 각도 기반 이젝터의 배열에 의한 운반 물체의 도관을 통한 각 등급에서의 공통 수집 위치로의 배출을 도시한 도관의 등각도(isometric view)이다.
도 6은 본 발명의 다른 실시 예에 따른 외부 특성에 기초하여 물체의 궤적을 연속적으로 추적함으로써 단일 경로에서 물체를 복수의 등급으로 선별하기 위한 새로운 방법과 관련된 다양한 비 제한적인 단계들을 나타내는 블록도이다.
이하, 본 발명은 본 발명의 비 제한적인 실시 예를 설명하기 위한 목적으로 첨부된 예시적인 도면을 참조하여 매우 상세하게 설명 될 것이다.
본 명세서에서 사용된 '물체'라는 용어는 캐슈, 아몬드, 건포도, 정향, 호두, 피스타치오 등의 농산물을 포함하되 이에 제한되지 않는 자연 발생적 제품을 포함하는 규칙적인, 불규칙적인, 고른, 고르지 않은, 균질한, 불균질한 물질을 의미하고, 모든 요리 견과류, 건조 과일 및 기타 규칙적으로 또는 불규칙적인 모양의 개체 일 수 있고, 또한 상기 '물체'라는 용어는 플라스틱 펠릿, 인조 돌, 보석 등 합성된 재료를 포함한다.
본 명세서에 사용된 '균질성'이라는 용어는 오직 등급을 선별할 아몬드 또는 오직 등급을 선별할 캐슈 또는 오직 등급을 선별한 인공 돌과 같은 하나의 임의 유형의 물체를 지칭한다.
본 명세서에서 사용된 '비균질성'이란 용어는 캐슈와 아몬드의 혼합물과 같은 상이한 유형의 물체 혼합물 또는 플라스틱 펠릿과 임의의 1종, 2종 또는 그 이상의 유형의 물체 혼합물을 지칭하며, 용어 '비균질성'은 가능한 모든 물체의 혼합 또는 다양성(variation)을 의미한다.
본 명세서에 사용된 바와 같이, 선별기에서 선별되는 물체의 '크기'는 물체의 극단에서 2mm에서 35mm 범위의 평균 크기이다.
본 명세서에서 사용된 용어 '외부' 또는 '물리적' 특성은 크기, 모양, 색상, 질감, 표면 특성 또는 기타 가능한 외부 또는 물리적 특성을 포함하되 이에 제한되지 않는 특성을 지칭한다.
본 명세서에 사용된 바와 같이, 적어도 하나의 광학 유닛이 적어도 하나의 도관에서 기인하기 때문에, 본 발명의 선별기에 복수의 광학 유닛이 존재하며, 각각의 광학 유닛은 '복수의 카메라' 및 '복수의 광원'을 포함하며, 상기 광원은 상기 물체의 강화된 표면 분석을 보장하기 위한 특정 광원인 것을 특징으로 한다. 상기 '복수의 카메라'라는 용어는 본 발명의 목적을 위해 프로그램 가능한 카메라인 '복수의 프로그램 가능(programmable) 카메라'를 의미한다. 이 카메라는 "일반 컬러 카메라" 또는 "멀티 스펙트럼 카메라"일 수 있으며, 또한 이 '복수의 카메라'는 동기식(synchronous) 또는 비동기식 또는 둘 다일 수 있다. '멀티 스펙트럼 카메라'라는 용어는 물체의 스펙트럼 특성을 분석하기 위하여 가시광선, 자외선, 적외선(IR), X 선 등과 같은 전자기 스펙트럼(멀티 스펙트럼)의 서로 다른 주파수에서 작동한다.
본 명세서에서 사용된 용어 '도관'은 '운반수단으로서 중력'을 갖는 수직관 또는 '경사면' 또는 '수평면' 또는 '중력의 반대 방향 운반'일 수 있으며, 각각의 '도관'은 복수의 센서층을 포함한다. '도관(conduit)'은 어떤 방향으로도 배열될 수 있으므로 복수의 센서층이 각 물체의 궤적을 연속적으로 추적할 수 있다. 복수의 센서층은 순간적으로 물체의 위치, 속도 등을 결정하고 실시간으로 관련 정보를 제공한다.
본 명세서에 사용된 바와 같이, 본 발명의 선별기에서 이젝터 유닛이라는 용어는 각각의 도관 내에서 복수의 이젝터 배열을 포함한다. 각각의 이젝터는 여러 개의 단일 각이 있는 이젝터 또는 다중 각이 있는(다중 각도 기반) 이젝터 그룹이며 '이젝터'라는 용어는 '단일 각이 있는(single-angled) 이젝터' 또는 '다중 각이 있는(multi-angled) 이젝터' 또는 둘 다를 의미한다.
본 명세서에서 사용되는 '유체의 압력' 또는 '공기의 압력'은 물체의 상이한 '외부' 또는 '물리적' 특성에 따라 달라질 수 있다.
본 발명의 일 실시 예에 따르면, 도 1은 상이한 외부 또는 물리적 특성을 갖는 물체를 선별하기 위한 새로운 지능형 및 멀티채널 선별기의 측면 개략도이다. 개시된 발명은, 물체의 궤도를 지속적으로 추적함으로써 외부 특성, 즉 크기, 모양, 색, 질감, 표면 특성 또는 다른 가능한 외부 또는 물리적 특성에 기초하여, 단일 경로에서 물체를 복수의 등급으로 선별하기 위한 궤도 추적 센서 네트워크를 갖는 새로운 지능형 및 멀티채널 선별기를 개시한다. 상기 선별기의 비 제한적인 구성요소는 적어도 하나의 호퍼(1); 복수의 공급기(feeder) 및 복수의 공급기 제어기를 포함하는 적어도 하나의 공급 유닛(2); 복수의 광학 유닛(3), 각각의 광학 유닛은 복수의 카메라(4) 및 복수의 광원(5)을 포함하며; 복수의 도관(6); 복수의 도관 내의 복수의 센서 네트워크(7), 각각의 도관은 단일 센서 네트워크를 포함하고; 적어도 하나의 마스터 제어기; 각각의 도관 내(6)에 단일 각이 있는 또는 다중 각이 있는 이젝터(ejector) 배열을 포함하는 적어도 하나의 이젝터 유닛; 복수의 수집 슈트(9); 복수의 수집 위치(10)를 포함한다. 상기 기기는 용이한 선별을 위하여 각 이젝터(8)의 맞은편에 각 도관(6) 전체에 걸쳐 배치된 복수의 진공 생성기(도1에 도시하지 않음)를 더 포함한다.
상기 선별기는 상이한 외부 특성을 가진 물체가 공급되는 거대한 호퍼(1)를 포함하고 있다. 호퍼(1)는 공급 유닛(2) 내로 물체를 연속적으로 분배 또는 유동시키기 위한 저장 유닛 및 분배 유닛의 역학을 한다. 물체는 호퍼(1)에서 물체를 받기 위해 호퍼(1) 아래에 위치한 공급 유닛(2)으로 흐르고, 상기 공급 유닛(2)은 2a1, 2a2, ... 2an으로 도시된 복수의 피더(feeder) 및 복수의 공급 제어기(도 1에 도시되지 않음)를 포함하고, 적어도 하나의 피더(2a1 또는 2a2 또는 2an)는 하부에서 적어도 하나의 광학 유닛(3)에 연결되고, 선별기는 공통 공급 유닛(2)으로부터 아래 방향으로 복수의 채널로 분할된다. 상기 물체는 공급 유닛(2)의 복수의 피더(2a1, 2a2, ... 2an)에서 상부에서 T1, T2, ... Tn(3)으로 도시된 복수의 광학 유닛으로 방출된다. 상기 광학 유닛은 상부에서 복수의 피더(2a1, 2a2, ... 2an)에 대응하여 연결되어 있고, 복수의 광학 유닛(3)의 하부는 대응하는 다중 도관(6)과 연결되며, 적어도 하나의 광학 유닛(3)은 각각의 도관(6)의 시작점의 상단에 위치된다. 효과적인 공급을 위하여 대응하는 피더에서 대응하는 광학 유닛(3) 및 대응하는 도관(6)으로, 물체의 대량 유동을 제어하기 위하여 하나의 피더를 위한 하나 이상의 피더 제어기가 존재한다. 그러므로 공급 유닛(2)은 특정 도관에서 떨어지는 물체의 수의 니즈에 기초하여 완전히 자동화되고 제어된다. 대응하는 도관의 공급 제어기는 대응하는 공급 피더에서 대응하는 광학 유닛 및 대응하는 도관(6) 내로 물체를 효과적으로 공급하기 위해 마스터 제어기와 결합하기 때문에, 피더에 대응하는 피더 제어기는 마스터 제어기를 통해 해당 도관의 센서 네트워크의 네트워크 제어기로부터 물체의 흐름과 관련된 신호를 수신한다.
물체는 공급 유닛(2)의 복수의 피더(2a1, 2a2, ...... 2an)로부터 복수의 대응하는 광학 유닛(3)으로 흐른다. 각각의 광학 유닛(3)은 C1, C2, ... ..Cn으로 도시된 복수의 프로그램 가능한 카메라(4) 및 L1, L2, ..., Ln으로 도시된 복수의 광원(5)을 포함한다. 물체가 임의의 광학 유닛(3)에 들어가면, 복수의 카메라 간의 상관관계를 이용하여 각 물체의 3차원(3D)을 분석하기 위해, 해당 광학 유닛(3)의 카메라(4)는 각 물체를 여러 면(side) 또는 여러 각도에서 관찰하고 각 물체의 6방향 뷰(six directional view)를 캡처하여 각 물체의 다양한 외부 특성에 대한 정보를 제공한다. 광학 유닛(3)의 복수의 광원(5)은 각각의 물체에 빛을 조명함으로써 각 물체의 특징을 발견/강화하여 카메라(4)가 각각의 물체를 더욱 강화된 방식으로 분석할 수 있도록 한다. 상기 카메라(4)는 광원(5)과 함께 각 광학 유닛을 통과하는 각 물체의 상이한 외부 특성을 분석한다. 각 광학 유닛(3)의 카메라(4)는 분석된 각 물체의 정확한 등급을 결정하고 캡처된 데이터를 처리하므로 광학 유닛(3)이 각 물체의 정확한 등급을 결정할 수 있다. 각 광학 유닛(3)은 각 등급의 물체와 관련된 신호를 마스터 제어기에 전달하고 상기 마스터 제어기는 각 광학 유닛(3)이 제공하는 입력 신호를 기반으로 각 분석 물체의 정밀하고 정확한 최종 등급을 결정한다. 마스터 제어기는 광학 유닛(3)에 있는 각 물체의 최종 등급을 지능적으로 기억한다.
물체는 복수의 광학 유닛(3)에서 복수의 광학 유닛(3)의 상부에 연결된 대응하는 복수의 도관(H1, H2, ... Hn(6)으로 도시됨)으로 더 흘러간다. 도관(6)의 형태 및 배열은 본 발명의 필요에 따라 달라질 수 있다. 상기 도관(6)은 운반수단으로서 중력을 갖는 수직관 또는 경사면 또는 수평면 또는 중력의 반대 방향 운반일 수 있다. 도 1에서, 상기 도관(6)은 '운반수단으로서 중력'을 갖는 튜브로 도시되어 있다. 각각의 도관(6)은 단일 센서 네트워크 및 복수의 이젝터(8) 배열을 복수의 진공 생성기와 함께 포함하고, 적어도 하나의 진공 생성기는 상기 물체를 특정 수집 선별 위치로 예측 가능하게 배출할 수 있도록 각각의 대응하는 이젝터의 반대 방향으로 각각의 도관 전체에 배치되어 있다. 복수의 센서 네트워크(7)는 복수의 대응하는 도관(6) 내에 위치하고, 하나의 센서 네트워크가 각각의 도관(6)에 위치하고 각각의 센서 네트워크는 각각의 도관(6) 전체에 정렬되어 있는 S1, S2 ...... Sn(7)으로 도시된 복수의 센서층, 대응하는 복수의 센서층(7)으로부터 신호를 수신하기 위한 복수의 센서층 제어기, 대응하는 도관의 모든 센서층 제어기를 제어하기 위한 적어도 하나의 네트워크 제어기를 포함하며, 각각의 센서층은 대응하는 도관(6) 내의 물체의 궤적을 연속적으로 추적하는 복수의 센서를 포함한다. 각각의 도관의 시작 지점에서 최종 낙하지점(수집 위치)까지 각각의 도관(6)의 전체에 걸쳐서 정렬된 복수의 센서층(7)은 실시간으로 각 물체의 궤도상의 위치를 지속적으로 추적하고 대응하는 복수의 센서층 제어기로 신호를 트리거(trigger)한다. 이들 복수의 센서층 제어기(7)는 대응하는 도관(6)의 외부에 위치한다. 대응하는 도관(6)의 내부에 위치한 단일 센서층(7)의 기능을 제어하기 위한 단일 센서층 제어기가 존재한다.
대응하는(corresponding) 복수의 센서층(7)을 조정하기 위한 복수의 센서층 제어기가 존재한다. 각각의 도관(6)의 각각의 센서층(7)의 복수의 센서는 특정 도관(6)에서 운반 물체의 궤적을 연속적으로 추적하여 각 물체의 위치, 속도 등을 실시간으로 정확하게 결정하고 대응하는 도관 내에서 각 운반 물체의 현재 위치, 속도 등을 실시간으로 해당 센서층 제어기로 신호를 트리거한다. 각각의 센서층 제어기는 단지 하나의 센서층(7)으로부터 신호를 수신하여, 하나의 센서층(7)으로부터 수신된 정보를 해석함으로써 실시간으로 정확하게 각 운반 물체의 정확한 위치, 속도 등을 결정한다. 각 센서층 제어기는 각 운반 물체가 해당 도관에서 특정 정지 지점으로 이동하는 데 필요한 시간 주기를 결정한다. 각각의 센서층(7)은 대응하는 센서층 제어기와 연결되고, 각각의 센서층 제어기는 대응하는 도관(6)의 적어도 하나의 네트워크 제어기와 연결된다. 해당 도관의 네트워크 제어기는 대응하는 도관(6)의 모든 센서층 제어기로부터 정보를 수신하고 실시간으로 운반 물체 각각 등급의 정확한 위치, 속도 등과 관련하여 마스터 제어기에 신호를 정확하게 전송하므로, 각각의 해당 도관(6)의 모든 센서층 제어기에서의 이들 신호는 물체가 대응하는 센서층의 복수의 빛을 차단할 때 각각의 대응하는 도관의 네트워크 제어기를 통해 상기 마스터 제어기로 전송되므로, 상기 마스터 제어기가 각 운반 물체의 정확한 위치, 속도 등을 실시간으로 정확하게 결정할 수 있다. 임의의 센서층이 대응하는 도관 내의 속이 빈 또는 손상된 운반 물체를 검출하면, 임의의 물체의 특정 중력 및 중공(hollowness)과 같은 특징은 그러한 물체의 속도 변화에 따라 대응하는 센서 네트워크의 네트워크 제어기에 의해 지능적으로 감지될 수 있고 동일한 정보를 마스터 제어기에 전송한다.
마스터 제어기는 물체가 선별 지점에 도달할 수 있도록 각각의 운반 물체의 정확한 등급 위치를 실시간으로 결정할 수 있다. 대응하는 도관(6)의 하나 또는 복수의 센서층 제어기로부터 신호를 수신하고, 해당 도관(6)의 임의의 센서를 무작위로 마주칠 수 있는 각 등급을 감지하기 위해 모든 센서층 제어기는 선별 공정 동안에 언제든지 활성화되기 때문에, 각 운반 물체의 위치, 속도 등에 대한 정보는 해당 도관의 모든 센서층 제어기에 의해 실시간으로 정확하게 분석된다.
또한, 상기 선별기는 적어도 하나의 이젝터 유닛을 포함하고, 이 이젝터 유닛은 선별기의 각 도관 내에서 복수의 이젝터 배열을 포함한다. 상기 이젝터 유닛은 각각 분석된 등급의 물체를 배출하기 위해 각 도관(6)에 있는 복수의 이젝터(8)의 배열을 포함한다. 도 1에 도시된 바와 같이, 다수의 이젝터(8)는 E1, E2 ......로 도시되고, 각 도관(6)에 'n' 개의 이젝터가 존재할 수 있으므로 n *은 자연 양의 정수이다. 각각의 이젝터(8)는 도 1에 도시된 것처럼 동일한 레벨에 배치된 단일 각이 있는 또는 다중 각이 있는 이젝터의 그룹으로, 하나의 상기 이젝터(E1)는 e11, e12 ......, e1n으로 표시된 것처럼 단일 각이 있는 또는 다중 각이 있는 이젝터 그룹으로 도시된다. 두 번째 이젝터(E2)는 e21, e22,,로 표시되고 e2n 및 마지막 이젝터(En)는 en1, en2, ......... enn으로 표시된다. 도관의 다른 구석(corner)에서 운반되는 동안에 상이한 사이즈의 물체는 상이한 속도를 가지기 때문에 특정 중력, 중공 등과 같은 물체의 특성에 따라 선별하기 위하여 단일 각이 있는 또는 다중 각이 있는 이젝터가 선별기에 사용된다. 단일 각이 있는 또는 다중 각이 있는 이젝터는 요구 사항에 따라 적절하게 사용된다. 이러한 유형의 이젝터는 예측 가능한 배출에 사용되므로 시스템이 더 효율적이다. 또한 상기 시스템은 크기가 다른 운반 물체를 쉽게 배출할 수 있도록 맞춤형(customized) 매니폴드(manifold)로 구성될 수 있다.
각각의 이젝터(8)는 대응하는 도관(6)에서 운반 물체를 향하여 소정의 기간 동안 고압 공기 또는 고압 유체의 분사를 배출시키는 것과 관련된 신호를 수신하기 위하여 마스터 제어기에 결합한다. 각 이젝터(8)는 대응하는 도관(6)에서 물체의 각 등급이 도착하기 전에 마스터 제어기에 의해 전송된 물체의 각 등급의 배출과 관련된 신호를 수신한다. 상기 마스터 제어기는 물체의 외부 특성과 관련하여 광학 유닛(3)으로부터 수신된 신호에 기초하여 각각의 분석된 물체의 정확한 최종 등급을 결정한다. 상기 마스터 제어기는 대응하는 도관(6)의 센서 네트워크의 네트워크 제어기를 통하여 각각의 센서층으로부터 수신된 각각의 물체의 등급의 정확한 위치, 속도 등과 관련된 신호에 기초하여 대응하는 도관에서 물체의 궤적 중 선별 지점에 도달하기 전에 각 물체의 정확한 위치, 속도 등을 예상할 수 있다. 상기 마스터 제어기에 의해 수신된 전술한 두 개의 서로 다른 신호에 기초하여, 상기 마스터 제어기는 상기 운반 물건의 배출과 관련된 대응하는 도관의 해당/특정 단일 각이 있는 이젝터(8) 또는 다중 각이 있는 이젝터(8)에 신호를 전송한다. 상기 이젝터(8)는 특정 등급의 물체를 다응하는 수집 위치(10)에 배출하기 위해 사전 정의된 기간 동안 고압 공기 또는 고압 유체의 분사를 방출하기 위하여 대응하는 도관(6) 내의 각각의 선별 지점 근처에서 동일한 레벨에 위치한다. 상기 마스터 제어기로부터 상기 신호에 응답하여, 특정 등급 물체가 특정 단일 각이 있는 또는 다중 각이 있는 이젝터가 위치하고 있는 해당 도관(6)의 선별 지점 근처에 운반되는 순간에, 그것은 대응하는 도관(6) 내의 특정 위치에서 물체의 궤적을 가로 질러 운반 물체 방향으로 향하는 소정의 고압 공기 또는 고압 유체의 분사를 배출하기 위하여 밸브를 개방하고 상기 이젝터(8)에 의해 가해지는 압력은 각각의 등급의 물체를 정확하게 배출하고 M1, M2, ..., Mn으로 도시된 대응하는 복수의 수집 슈트(9)를 통해 각각의 등급의 물체가 B1, B2 ...... Bn으로 도시된 대응하는 원하는 수집 위치(10)로 떨어지게 된다. 각각의 선별 지점에서, 선별기는 단일 각이 있는 또는 다중 각이 있는 이젝터가 될 수 있는 적어도 하나의 이젝터(8)를 구비하고, 대응하는 수집 위치와 함께 적어도 하나의 수집 슈트가 위치된다. 단일 경로에서 증가된 효율로 여러 등급의 물체의 산출량을 지속적으로 향상시키기 위하여 상기 단일 각이 있는 또는 다중 각이 있는 이젝터는 운반 물체의 궤적을 따라 배치된다.
상기 선별기는 용이한 선별을 위하여 각 도관(6) 전체에 걸쳐 각 이젝터(8)의 맞은편에 각각 배치된 복수의 진공 생성기(도 1에 도시하지 않음)를 더 포함한다. 수집 슈트(9) 각각에서의 진공의 발생은 특정 도관(6)에 대응하는 네트워크 제어기를 통해 적어도 하나의 센서층 제어기에서 전달되는 신호에 기초한다. 호퍼, 공급 장치, 광학 유닛, 도관 또는 선별기의 다른 부분은 폴리 우레탄, 식품 등급 아크릴(food grade acrylic), 이온화 요소 또는 테프론(Teflon) 코팅 물질과 같은 재료로 만들어진다. 상기 도관(6)은 임의의 방향으로 배열될 수 있어서, 복수의 센서층(7)이 각 물체의 궤적을 연속적으로 추적할 수 있게 한다. 각 도관(6)은 물체를 선별하기 위한 하나의 채널로 간주된다; 따라서 상기 선별기는 선별기에 복수의 도관(6)이 존재하기 때문에 여러 채널을 통해 선별을 제공하며, 선별기는 최대 수의 물체를 빠르고 효과적으로 선별하기 위해 복수의 채널을 가진다.
예를 들어:
상기 선별기는 단일 경로에서 복수의 등급을 제공함으로써 여러 가지 상이한 물체에 효과적으로 적용된다. 다음과 같이 몇 가지 물체의 이름을 지정한다:
캐슈 스플릿(Cashew Splits)은 JH, S, K, LWP, SWP, SPS 등의 체(sieve)로 분리할 수 없는 여러 등급으로 효과적으로 선별할 수 있다.
카르다몬(Cardamom)은 AGEB, AGB, AGS, AGS-1, AGS-2 등과 같은 여러 등급으로 효과적으로 선별할 수 있다.
도 2를 언급하면, 본 발명의 일 실시 예에 따른 선별기의 단일 광학 유닛의 등각도(isometric view)이다. 도 2는 도 1에 도시된 복수의 광학 유닛(3) 중 단지 하나인 광학 유닛 T1(3)의 확대도 이다. 도 2는 (P1)으로 표시된 물체를 분석하는 도관 H1(6)의 시작 지점에 위치한 광학 유닛 T1(3)을 도시한다. 도시된 바와 같이, 광학 유닛(T1)은 C1, C2, ... ..Cn (여기서 'n'은 자연 양의 정수)으로 표시된 복수의 카메라(4) 및 L1, L2, ... Ln (여기서, 'n'은 자연 양의 정수)으로 표시된 복수의 광원(5)을 포함한다. 상기 도관(H1)에서 상이한 물체의 외부 특성에 관한 정보를 제공하는 복수의 카메라(4)는 물체의 외부 특성 및 각 물체의 6방향 뷰(six directional view)를 캡쳐하고, 복수의 카메라 간의 상관관계(correlation)를 이용하여 각각의 물체 3D를 분석하기 위하여 여러 면(side) 또는 여러 각도에서 각 물체를 관찰한다. 광학 유닛(T1)의 복수의 광원(5)은 광학 유닛(3)에 배치되어 물체(P1)에는 균일한 밝기가 존재한다. 상기 물체(P1)의 모든 외부 특성을 더욱 강화된 방식으로 분석하기 위하여 복수의 광원(3)이 서로 다른 각도에서 물체(P1)를 조명하므로 복수의 카메라(4)가 더욱 향상된 방식으로 물체를 명확하게 볼 수 있고, 따라서 분석 물체(P1)의 정확한 등급을 결정하기 위한 복수의 카메라(4)의 효율성을 증가시킨다. 복수의 카메라(4)는 K1, K2 ... Kn(여기서 'n'은 자연 양의 정수)로 표시된 다른 이미지를 캡처한다.
도 3을 참고하면, 이는 본 발명의 일 실시 예에 따른 도관 전체에 걸친 복수의 이젝터 및 복수의 수집 슈트들의 배열 및 복수의 센서층의 배열을 도시하는 단일 도관의 정면도이다. 도 3은 도 1에 도시된 다수의 도관 중 도관 H1(6)의 확대 도면이다. 선별기의 각 도관(6)은 선별 물체를 위한 하나의 채널로 간주되다. 상기 도관(6)은 운반수단으로서 중력을 갖는 수직관(자유 낙하) 또는 경사면 또는 수평면 또는 중력의 반대 방향 운반일 수 있고, 상기 도관(6)은 복수의 센서층(7)이 각 물체의 궤적을 연속적으로 추적할 수 있도록 임의의 방향으로 배열될 수 있다. 도 3에 도시된 상기 도관(6)은 선별기에서 도관(6)을 나타내기 위한 목적으로 물체가 “운반수단으로서 중력(gravity as conveyance)”과 함께 운반되는 튜브이다. 이는 선별기에서 가능한 도관의 형태 및 배열의 변형을 제한하지 않는다. 물체는 광학 유닛에서 도관(H1)으로 흐른다. 상기 도관(H1)은 도관(6) 전체에 걸쳐 배치된 S1, S2, ... Sn으로 도시된 복수의 센서층(7), 복수의 센서층 제어기(여기서, 'n'은 자연 양의 정수) 및 하나의 도관(6)의 모든 센서층 제어기를 제어하기 위한 적어도 하나의 네트워크 제어기를 포함하는 하나의 센서 네트워크를 포함한다. 상기 센서층(7)은 도관(H1)의 시작 지점에서 마지막 낙하지점까지 배열된다. M1, M2, M3, M4, M5, M6, M7, ...... Mn (여기서 'n'은 자연 양의 정수)으로 표시된 여러 수집 슈트(9)가 존재하고 이를 통하여 물체가 흐르고 복수의 수집 위치로 수집된다. 복수의 센서층(7)의 배열은 물체가 도관(H1)의 임의의 코너로부터 통과되더라도 대응하는 복수의 센서층 제어기가 각각의 운반 물체의 정확한 위치, 속도 등을 알 수 있도록 물체를 추적할 수 있게 한다. 이는 마스터 제어기가 상기 센서 네트워크의 네트워크 제어기를 통하여 도관(H1)에서 운반 물체의 위치, 속도 등을 예측할 수 있도록 도와주고 마스터 제어기가 대응하는 도관의 E1, E2, ..., En (여기서, n은 자연 양의 정수)으로 도시된 상이한 배열을 갖는 복수의 이젝터(8)의 해당 단일 각이 있는 또는 다중 각이 있는 이젝터에 신호를 전달한다. 이들 이젝터는 복수의 수집 슈트(9)를 통해 각각의 분석된 물체를 대응하는 원하는 수집 위치로 배출한다.
도 4를 언급하면, 본 발명의 일 실시 예에 따른 운반수단으로 중력을 갖는 관으로서 도관을 도시하는 단일 도관의 정면도이다. 하나의 도관(H1)(6)은 도 4에 도시되어 있고, 복수의 도관 외부는 도 1에 도시되어 있다. 도 4는 단일 도관(H1)에서 운반 물체를 연속적으로 추적하는 전체 메커니즘과 단일 도관(H1)에서 복수 선별의 전체 메커니즘을 자세히 설명한다. 상이한 외부 특성의 물체 (P1, P2, P3 ... Pn (여기서, n은 자연 양의 정수)는 광학 유닛(T1)으로부터 도관(H1) 전체에 걸쳐 복수의 층(7) S1, S2, S3 ...... Sn (여기서, 'n'은 자연 양의 정수)으로 분할된 복수의 센서층을 포함하는 상기 도관(H1)으로 운반된다. 도 4에 도시된 바와 같이, 2개의 센서층(S1, S2, ... Sn) 사이의 거리는 달라질 수 있다. 물체(P1)가 광학 유닛(T1)을 지나면 마스터 제어기는 등급 및 선별 지점을 알고 있다. 물체(P1)의 위치, 속도 등을 파악하기 위해 상기 마스터 제어기는 단일 도관(H1)의 모든/다른 센서층 제어기에서 정보를 수집하는 센서 네트워크의 네트워크 제어기로부터 정보를 지속적으로 수신한다.
센서층 S1을 생각해 보면, 이 층에서 물체(P1)가 지나갈 때 여러 개의 빛이 차단되므로, S1은 물체의 위치 정보를 S1 제어기에 제공한다. S1 제어기는 이 정보를 S2 제어기로 전송하고 실제로 상기 물체(P1)가 센서층 S2로 이동하면, 이는 빛을 차단하고 S2는 S2 제어기에 물체의 위치, 속도 등에 대해 동일한 정보를 제공한다. 동시에 S1에서 S2로 물체(P1)를 운반하는 동안, 이 S1 제어기와 S2 제어기에서 물체(P1)의 위치, 속도 등의 정보가 S3로 전송되고 네트워크 제어기를 통해 마스터 제어기로 전송된다. 또한, 물체(P1)가 센서층 S3을 차단할 때, S3는 물체의 위치 및 속도 정보를 S4 제어기 및 네트워크 제어기를 통해 마스터 제어기에 제공하고 복수의 센서층에 의해 물체를 추적하는 과정이 연속되어 마스터 제어기가 물체(P1)의 정확한 위치, 속도 등을 알 수 있도록 도와준다. 마스터 제어기는 이 데이터를 해석하여 도관(H1)의 해당 이젝터에 물체(P10)를 배출하기 위한 신호를 보내어 물체(P1)의 정확한 선별 지점을 결정한다.
도 4를 언급하면, 물체(P1)가 그 선별 지점에 도달하면, 임의의 이젝터 E1 또는 E2 또는 E3 또는 E4 (8) 가 될 수 있는 각각의 이젝터에 의해서 대응하는 수집 슈트 M1, M2, M3 or M4 (9)를 통하여 운반 경로에서 B1, B2, B3 or B4 일 수 있는 각각의 수집 위치(10)로 배출될 수 있다. 도 4에서, 물체(P2)는 운반 물체(P2)의 반대 방향으로 고압 공기 또는 고압 유체의 분사를 소정 기간 동안 배출함으로써 이젝터(E3)(8)에 의해 배출되도록 도시되어있고 상기 물체는 수집 슈트 M3(9)를 통해 수집 위치 B3 (10)에 떨어진다. 임의의 물체가 도관(H1)의 등급에 속하지 않으면, 해당 도관(H1)에 부착된 마지막 수집 위치에서 수집된다.
도 5는 본 발명의 일 실시 예에 따른 도관 전체의 각각 등급에서 단일 각도 또는 복수 각도 기반 이젝터의 배열에 의한 공통 수집 위치로 운반 물체의 배출을 도시한 도관의 등각도 이다. 도 5에 도시된 바와 같이, 각각의 선별 지점에는 e11, e12, e13 ... e21, e22, e23, e33 ......로 도시되는 복수의 이젝터(8)가 존재한다. 상기 이젝터는 S1, S2, ... S8 ...로 도시되는 복수의 센서층(7)이 배열된 도관(H1)에서 동일한 레벨 및 상이한 각도로 위치한 enn으로 확장될 수 있다. 단일 각이 있는 또는 다중 각이 있는 복수의 이젝터 배열은 본 발명의 범위 내에서 변화될 수 있으며, 상기 이젝터의 도시된 배열은 단지 본질적으로 예시적인 것이며, 본 발명을 제한하지 않는다. 단일 각이 있는 또는 다중 각이 있는 이젝터는 필요에 따라서 적적하게 사용된다. 이러한 유형의 이젝터는 예측 가능한 배출에 사용되므로 선별기를 더욱 효율적으로 만든다. 선별기는 또한 물체를 쉽게 배출할 수 있도록 맞춤형(customized) 매니 폴드(manifold)를 포함할 수있다.
복수의 센서층 및 상기 이젝터는 도관(H1)에서 상이한 방식으로 배열될 수 있다. 물체(P1, P2, P3……. Pn으로 확장 가능)가 광학 유닛에서 상기 도관(H1) 전체의 각 선별 지점에서 물체가 흘러가는 복수의 수집 슈트(M1, M2, M3 ……Mn으로 확장 가능, 'n'은 자연 정수 )가 부착된 상기 도관(H1)으로 이동될 때 및 물체가 도관(H1)의 정확한 선별 지점에 도달할 때, 고압 공기 또는 고압 유체의 소정의 지속 시간 동안 분사를 효과적으로 방출하여 수집 슈트 M3(9)를 통해 수집 위치 B3(10)로 떨어지는 물체(P2)를 배출하기 위해 대응하는 물체(P2)는 마스터 제어기에 의해 동시에 활성화되는 복수의 다중 각도를 갖는 이젝터(e31, e32, e33...e3n)에 의해 배출되도록 도시된다. 임의의 물체가 도관(H1) 내의 어느 등급에도 속하지 않으면 도관(H1)에 부착된 마지막 수집 위치에서 수집된다. 여러 개의 단일 각이 있는 또는 다중 각이 있는 이젝터(e11, e12, ... enn)의 독특한 배열 때문에, 물체가 도관의 어느 구석(corner)을 통과하더라도 그것을 정확히 원하는 수집 위치(B1, B2 , B3, ... ... Bn까지 확장될 수 있음)로 떨어뜨릴수 있고, 이로써 상기 기계를 보다 효율적으로 만든다.
본 발명의 다른 실시 예에 따르면, 도 6은 외부 특성 즉 크기, 모양, 색상, 질감, 표면 특성 또 기타 가능한 외부 특성에 따라 궤도 추적 센서 네트워크를 구비한 새로운, 지능형 및 멀티채널 선별기를 사용하여 물체의 궤적을 연속적으로 추적함으로써 단일 경로에서 물체를 여러 등급으로 선별하기 위한 새로운 공정을 수반하는 다양한 비 제한적인 단계를 나타낸 블록도이다.
적어도 하나의 호퍼(21); 복수의 공급기(feeder) 및 복수의 공급기 제어기를 포함하는 적어도 하나의 공급 유닛(22); 복수의 광학 유닛(23), 각각의 광학 유닛(23)은 복수의 카메라(24) 및 복수의 광원을 포함하며; 복수의 도관; 복수의 도관 내의 복수의 센서 네트워크(25), 각각의 도관은 복수의 센서층, 복수의 센서층 제어기 및 적어도 하나의 네트워크 제어기를 포함하는 단일 센서 네트워크를 포함하고; 적어도 하나의 마스터 제어기(26); 각각의 도관 내에 단일 각이 있는 또는 다중 각이 있는 이젝터(ejector) 배열을 포함하는 적어도 하나의 이젝터 유닛(27); 복수의 수집 슈트; 복수의 수집 위치(28)를 포함한다. 상기 기기는 특정 수집 등급 위치(28)로 물체의 예측 가능한 배출을 위해 이젝터 유닛(27)의 각각의 이젝터 맞은편에 각 도관 전체에 걸쳐 각각 배치된 복수의 진공 생성기를 더 포함한다.
물체는 호퍼(21)에서 공급 장치(22)로 흐른다. 상기 공급 유닛(22)은 자동화되고 공급 유닛(22) 내의 물체의 공급 속도는 공급 유닛(22)으로부터 물체의 대량 유동을 피하기 위해 체계적인 방식으로 복수의 공급 제어기에 의해 제어된다. 물체는 공급 유닛(22)으로부터 복수의 광학 유닛(23)으로 방출된다. 복수의 광학 유닛(23)은 대응하는 복수의 도관에 추가로 연결된다. 물체는 공급 유닛(22)에서 복수의 광학 유닛(23)으로 흐른다. 임의의 물체가 들어올 때 각각의 광학 유닛(23)에서, 서로 다른 외부 특성에 대한 정보를 제공하는 카메라 간의 상관관계를 이용하여 각 물체를 3차원으로 분석하기 위해 각각의 물체는 복수의 프로그램 가능한 카메라 1, 카메라 2, 카메라 n*, ('n*' 카메라 n을 나타내고, n은 자연 양의 정수를 나타냄)에 의하여 여러 면(side) 또는 여러 각도에서 관찰되고 각각의 물체의 이미지는 적어도 6방향 뷰(six directional view)로 캡처 된다. 광학 유닛(23)의 복수의 광원은 카메라(24)가 각각의 물체를 더욱 강화된 방식으로 분석할 수 있도록 각 물체를 조명함으로써 각 물체의 특징을 부각시킨다. 각 광학 유닛(23)의 광원(도 2에 도시되지 않음)과 함께 카메라(24)는 캡처 된 데이터를 처리함으로써 분석된 물체의 정확한 등급을 결정한다. 이것은 각각의 광학 유닛(23)이 어떻게 캡처 된 데이터를 처리하고 각 물체의 상이하고 정확한 등급을 결정하는 방법에 대한 것이다.
각 광학 유닛(23)은 각 분석 물체의 정확한 등급과 관련된 신호를 마스터 제어기(26)에 전달하고 마스터 제어기(26)는 각 광학 유닛(23)에 의해 제공된 입력 신호에 기초하여 각 분석 물체의 정밀한, 정확한 최종 등급을 결정하고 상기 마스터 제어기는 광학 유닛(23)에 존재하는 각각의 물체의 최종 등급을 지능적으로 기억한다. 각각의 광학 유닛(23)은 대응하는 도관과 추가로 연결되기 때문에; 물체는 각각의 광학 유닛(23)으로부터 대응하는 도관으로 흐른다. 각 도관은 물체 선별을 위한 하나의 별도 채널로 간주되므로 다중 채널 선별이 용이해진다. 상기 물체는 복수의 광학 유닛(23)으로부터 상응하는 복수의 도관으로 방출되며, 각각의 도관은 단일 센서 네트워크(25), 복수의 이젝터 배열 및 복수의 진공 생성기를 포함한다. 선별기가 적어도 하나의 이젝터 유닛을 포함하기 때문에, 선별기는 각 도관 내에서 복수의 이젝터 배열을 포함한다. 각각의 센서 네트워크(25)는 각각의 도관 전체에 걸쳐 배치된 복수의 센서층, 복수의 센서층 제어기 및 적어도 하나의 네트워크 제어기를 포함한다. 물체가 각 도관을 통해 전달됨에 따라, 대응하는 센서층 제어기와 조화(co-ordination)된 복수의 센서층은 실시간으로 물체의 궤적에서 각 물체의 위치, 속도 등을 연속적으로 추적하며, 상기 복수 센서층은 대응하는 도관에서 떨어지는 각 물체의 위치, 속도 등에 관하여 대응하는 센서층 제어기로 신호를 트리거 한다.
또한, 대응 도관의 각 센서층 제어기는 센서 네트워크(25)의 네트워크 제어기와 연결되고, 네트워크 제어기는 모든 센서층 제어기에서 정보를 수집하고 실시간으로 각 등급의 운반 물체의 정확한 위치, 속도 등과 관련된 이들 신호를 마스터 제어기(26)에 제공하며, 따라서 각 도관으로부터의 각 센서층 제어기로부터의 이들 신호는 물체가 대응하는 센서층의 다수의 빛을 차단할 때 각각의 도관의 센서 네트워크(25)의 네트워크 제어기를 통해 마스터 제어기(26)에 전송되고, 마스터 제어기(26)는 각 운반 물체의 선별 지점을 결정함으로써 실시간으로 각 등급 운반 물체의 정확한 위치, 속도 등을 결정할 수있다.
마스터 제어기(26)는 광학 유닛(3)으로부터 수신된 물체의 외부 특성과 관련된 신호에 기초하여 각 분석된 물체의 정확한 최종 등급을 결정하고, 또한 상기 마스터 제어기(26)는 각 대응하는 도관의 해당 센서 네트워크(25)의 네트워크 제어기로부터 수신된, 실시간으로 정확하게 각 등급의 물체의 정확한 위치, 속도 등과 관련된 신호에 기초하여 해당 도관의 물체의 궤적 동안 각 물체가 선별 지점에 도달하기 전 각 등급의 물체의 정확한 위치, 속도 등을 예상할 수 있다. 상기 마스터 제어기에 의해 수신된 전술한 두 개의 다른 신호에 기초하여, 상기 마스터 제어기(26)는 이젝터 유닛(27)의 복수의 이젝터의 특정 배열의 대응하는/특정 단일 각이 있는 이젝터 또는 복수의 각이 있는 이젝터에 신호를 전송하고, 상기 이젝터는 대응하는 도관 내의 각 선별 지점 근처에서 동일한 레벨에 위치한다. 각각의 대응하는 도관에서, 각 선별 지점에서, 진공 생성기 및 적어도 하나의 수집 슈트와 함께 단일 각이 있는 또는 다중 각이 있는 이젝터가 상응하는 수집 위치와 함께 위치되고, 상기 진공 생성기는 대응하는 도관의 네트워크 제어기를 통해 적어도 하나의 센서층 제어기에 의해 전달된 신호에 기초하여 상기 각각의 수집 슈트에서 진공을 발생시키면서 각 도관 전체에 각 이젝터에 반대 방향으로 용이한 선별을 위해 각각 배치되어 있다.
해당 등급의 물체가 해당 도관의 선별 지점에 도달하면 상기 마스터 제어기는 대응하는 도관 내의 운반 물체를 향해 소정의 기간 동안 고압 공기 또는 고압 유체의 분사를 방출하기 위해 이젝터 유닛(27)의 (각 도관의)복수의 이젝터로 신호를 전송한다. 대응하는 도관의 각각의 이젝터가 마스터 제어기(26)에 결합하기 때문에, 따라서 각각의 해당 이젝터는 대응 도관에 각 등급의 물체가 도착하기 전에 마스터 제어기(26)에 의해 전송된 각 물체의 배출과 관련된 신호를 수신한다. 특정 등급의 물체가 그의 궤도를 지나 해당 도관의 특정 위치에서 해당 도관의 특정 선별 지점 근처로 운반할 때, 대응하는 도관의 이들 단일 각이 있는 또는 다중 각이 있는 이젝터는 특정 등급의 물체를 배출하기 위해 소정의 기간 동안 고압 공기 또는 고압 유체의 분사를 방출하는 밸브를 개방하고, 상기 이젝터에 의해 가해지는 압력은 각 등급의 물체를 정확하게 배출하고, 그에 따라 단일 경로에서 복수의 등급으로 상이한 등급의 물체를 수집할 수 있도록 각각의 등급의 물체를 해당 수집 슈트를 통해 원하는 해당 수집 위치(28)로 떨어뜨린다.
당해 기술분야에서 통상의 지식을 가진 자에게 쉽게 명백한 바와 같이, 본 발명은 본질적인 특성에서 벗어남 없이 다른 특정 형태로 쉽게 제조될 수 있다. 따라서 본 발명의 실시 예는 단지 예시적인 것으로 간주되고, 제한적이지 않고, 본 발명의 범위는 전술한 설명보다는 청구범위에 의하여 나타나므로, 모든 변화가 청구항 안에 포함되도록 의도된 것이다.
Claims (9)
- 적어도 2mm 내지 35mm 범위의 크기를 갖는 물체의 궤도를 연속적으로 추적하여 단일 경로에서 외부 특성에 기초하여 복수의 등급으로 물체를 선별하기 위한 궤도 추적 센서 네트워크를 구비한 새로운 지능형 및 멀티 채널 선별기로, 상기 선별기는:
- 상기 호퍼로부터 물체를 수신하기 위해 상기 호퍼의 아래에 위치하는 적어도 하나의 공급 유닛, 상기 공급 유닛은 복수의 피더(feeder) 및 복수의 공급 제어기를 포함하고, 상기 공급 유닛은 자동화되어 있고 상기 물체를 각 피더에서 더 아래쪽으로 보내는 체계적인 방법으로 상기 물체의 공급률을 제어하는 상기 공급 제어기에 의해 작동 및 제어되고, 상기 피더들로부터 상기 물체들을 각 피더 아래쪽으로 방출함;
- 상기 복수의 피더의 하측에 연결되어 상기 복수의 해당 피더들로부터 방출된 상기 물체를 수용하는 복수의 광학 유닛, 적어도 하나의 피더가 적어도 하나의 광학 유닛에 부착되고, 하나의 피더의 적어도 하나의 피더 제어기가 후속 공정을 위해 상기 물체의 공급률을 제어하고, 각 광학 유닛은 복수의 프로그램 가능한 카메라 및 복수의 광원을 포함하고, 상기 카메라들은 각 물체의 적어도 6개의 방향의 이미지를 캡쳐(capture)하고 각 물체의 상이한 외관 특성에 따른 캡쳐 이미지에 기초하여 각 물체를 3차원(3D)으로 분석하기 위해 여러 면(side) 및/또는 여러 각도에서 각 물체를 관찰할 수 있도록 서로 상관되어 있고 상기 카메라가 각각 분석된 물체의 정확한 등급을 결정할 수 있도록 이끄는 더 강화된 방식으로 상기 카메라가 물체를 분석할 수 있도록 상기 복수의 광원은 각 물체를 조명(illuminating)하여 상기 물체의 특성을 부각시키고, 각각의 상기 광학 유닛은 각각의 상기 물체의 정확한 등급을 결정하기 위해 상기 카메라에 의해 상기 캡쳐된 상기 데이터를 처리하고, 각각의 분석된 물체의 정확한 등급과 관련된 추가의 신호가 후속 처리를 위해 각각의 상기 광학 유닛으로부터 전송됨;
- 대응하는 상기 복수의 광학 유닛의 하부에 연결되어 상기 복수의 광학 유닛으로부터 물체를 수신하는 복수의 도관, 적어도 하나의 광학 유닛은 해당 광학 유닛으로부터 물체를 수신하기 위한 각각에 대응하는 도관의 시작 지점 상단에 연결되고, 각각의 도관은 각 도관의 시작 지점에서 물체의 마지막 낙하지점까지 각 상기 도관 전체에 걸쳐 정렬된 다수의 센서층을 포함하는 단일 네트워크; 복수의 해당 센서층과 조정(coordinate)하기 위한 복수의 센서층 제어기, 해당 도관의 각각의 센서층과 조정하기 위한 단일 센서층 제어기가 존재함; 및 해당 도관의 모든 센서층 제어기를 제어하기 위한 적어도 하나의 네트워크 제어기를 포함하고, 각각의 센서층은 복수의 센서를 포함하고 상기 각 센서층은 실시간으로 각각의 물체의 위치를 궤적에서 연속적으로 추적하고 실시간으로 각각의 운반 물체의 위치, 속도에 대해 상기 해당 센서층 제어기로 신호를 트리거(trigger)함; 및 해당 도관의 각각의 센서층은 적어도 위치 및 속도에 관한 신호를 해당 도관의 모든 센서층 제어기로부터 상기 신호를 수신하는 상기 네트워크 제어기로 트리거하고 대응하는 도관의 상기 네트워크 제어기는 추후 처리를 위해 대응하는 도관의 모든 센서층 제어기에서의 상기 신호를 전송함;
- 각각의 광학 유닛, 상기 광학 유닛으로부터의 상이한 신호를 조정하는 각 센서 네트워크의 각 네트워크 제어기 및 선별기의 각각의 센서 네트워크의 네트워크 제어기에 연결되는 적어도 하나의 마스터 제어기, 상기 광학 유닛에 의해 전송된 각각의 분석 물체의 등급과 관련된 신호를 수신하고 상기 각각의 분석된 물체의 정밀한, 정확한, 최종 등급을 결정하고, 상기 광학 유닛의 카메라는 상기 마스터 제어기에 의하여 그들 사이의 상관관계가 가능하고; 및 상기 마스터 제어기는 또한 상기 물체가 상기 대응하는 센서층의 복수의 빛을 차단할 때 해당 도관의 각 센서 네트워크의 각 네트워크 제어기에서 전송된 실시간으로 정확하게 각각의 등급 운반 물체의 정확한 위치 및 속도와 관련된 신호를 수신하고, 그로 인해 해당 도관에서 물체의 궤적 중에 선별 지점을 결정함으로써 각 운반 물체의 정확한 위치, 속도를 예상할 수 있고 나아가 상기 마스터 제어기는 상기 운반 물체가 해당 도관의 선별 지점에 도착할 때 해당 도관의 상기 운반 물체의 배출과 관련된 신호를 전송함;
- 복수의 진공 생성기와 조합(combination)된 복수의 이젝터 배열 및 상기 이젝터를 포함하는 적어도 하나의 이젝터 유닛, 그리고 상기 진공 발생기는 상기 센서 네트워크에 추가하여 각 도관 내에 위치하며, 상기 이젝터는 각각의 상기 도관에서 단일 각이 있는 이젝터 또는 다중 각이 있는 이젝터이고, 상기 이젝터는 해당 도관 내의 각 선별 지점 근처에서 동일한 레벨에 위치되고, 상기 운반 물체가 상기 선별 지점에 도달할 때, 상기 마스터 제어기로부터 상기 운반 물체의 배출과 관련된 신호를 상기 해당 도관의 해당 이젝터에서 수신하고, 따라서 해당 도관 내의 선별 지점에서 물체의 궤적을 지나 상기 운반 물체를 향한 방향으로 소정의 기간동안 고압 공기 또는 고압 유체의 분사를 방출하고 해당 도관의 운반 경로로부터 복수의 등급 물체를 방출하고, 상기 하나 이상의 진공 생성기는 해당 도관으로부터 상기 운반 물체의 예상 가능한 배출 및 방출을 위해 각각의 해당 이젝터에 대해 반대 방향으로 상기 각 도관 전체에 위치함;
- 수집 목적을 위해 상기 진공 생성기와 협력하여 상기 이젝터에 의해 상기 상응하는 도관으로부터 배출된 상기 대응하는 복수의 등급 물체를 운반하기 위한 복수의 수집 슈트, 상기 진공 생성기는 해당 도관의 센서 네트워크의 네트워크 제어기를 통해 적어도 하나의 센서층 제어기에서 전달된 신호에 기초하여 상기 수집 슈트에서 진공을 생성함;
-단일 경로에서 복수 등급의 물체를 복수 등급으로 수집하기 위한 복수의 수집 위치;를 포함하는 선별기.
- 제1항에 있어서,
상기 해당 피더의 각 공급 제어기는 복수의 물체가 특정 도관에 떨어지도록 하는 요구에 기초하여 상기 해당 광학 유닛 내로 및 광학 유닛으로부터 해당 도관 내로 물체의 물량(rate of flow)을 제어하기 위해 상기 마스터 제어기와 연결되고 상기 마스터 제어기가 센서 네트워크에 결합하여 상기 대응하는 도관 내의 물체의 물량과 관련된 신호를 수신하고 상기 마스터 제어기가 신호를 수신한 후에, 대응하는 피더의 상기 공급 제어기가 효과적인 선별의 필요성에 따라 대응하는 광학 유닛 및 상기 대응하는 도관 내의 제어된 수의 물체를 방출하는, 선별기
- 제1항에 있어서,
상기 각각의 도관은 운반수단으로서 중력을 가지는 수직관 또는 경사면 또는 수평면 또는 중력과 반대방향의 운반이고, 상기 해당 도관은 임의의 방향으로 배열되어 해당 도관의 하나 이상의 센서층이 각각의 운반 물체의 궤적을 연속적으로 추적할 수 있고, 및 상기 각각의 센서층은 해당 도관의 단일 센서층 제어기와 연결되고, 및 해당 도관의 모든 센서층 제어기는 해당 도관의 모든 센서층 제어기로부터 상기 운반 물체의 적어도 위치 및 속도와 관련된 신호를 수신하는 해당 도관의 적어도 하나의 네트워크 제어기와 연결되어, 상기 운반 물체의 궤도를 실시간으로 연속적으로 추적할 수 있고, 해당 도관의 센서 네트워크의 상기 네트워크 제어기는 상기 운반 물체의 선별 지점을 결정하기 위해 상기 신호를 상기 마스터 제어기로 전송하고, 및 상기 마스터 제어기는 실시간으로 각 운반 물체의 정확한 등급 점을 결정하는 선별기.
- 제1항에 있어서,
해당 도관의 하나 또는 복수의 센서층으로부터 상기 신호를 수신하기 위해 해당 도관의 임의의 센서를 무작위로 만나는(come across) 상기 운반 물체의 각 등급을 감지하기 위해 모든 센서층 제어기는 선별 공정 중에 항상 활성화되기 때문에 상기 각각의 운반 물체의 위치 및 속도와 관련된 해당 도관의 각 센서층으로부터의 상기 신호는 대응하는 도관의 모든 센서층 제어기에 의해 실시간으로 정확하게 분석되는 선별기.
- 제1항에 있어서,
해당 도관의 상기 임의의 센서층이 해당 도관 내의 속이 빈(hollow) 또는 손상된 운반 물체를 감지하는 경우, 해당 도관의 해당 센서 네트워크의 네트워크 제어기에서 운반 물체의 임의의 중공 또는 손상의 속도 변화에 따라서 상기 속이 빈 또는 손상된 운반 물체의 특정 중력 또는 중공(hollowness)을 포함하는 상이한 특징을 지능적으로 결정하기 위해, 센서 네트워크의 상기 네트워크 제어기는 상기 중공 또는 손상된 운반 물체의 상기 특성에 관한 정보를 상기 마스터 제어기에 송신하고, 상기 마스터 제어기는 운반 물체의 선별 지점에 도착하도록 상기 중공 또는 손상된 운반 물체의 정확한 위치 및 속도를 실시간으로 결정하는 선별기.
- 제1항에 있어서,
해당 도관의 각 선별지점에서, 적어도 단일 각이 있는 이젝터 또는 다중 각이 있는 이젝터; 및 해당 수집 위치와 함께 적어도 하나의 수집 슈트가 존재하고, 상기 단일 각이 있는 이젝터 또는 다중 각이 있는 이젝터는 상기 선별될 운반 물체의 특정 중력 및 중공을 포함하는 특징에 따라 상기 선별기에 설치되고, 상기 선별기는 크기가 상이한 상기 운반 물체를 용이하게 배출할 수 있도록 맞춤형 매니 폴드(manifold)를 더 포함하는 선별기.
- 제1항에 있어서,
상기 호퍼, 상기 공급 유닛, 상기 광학 유닛, 상기 도관 또는 상기 기계의 다른 부품들은 폴리 우레탄(polyurethane), 식품 등급 아크릴(food grade acrylic), 이온화 요소(ionized elements) 및 테프론(teflon) 코팅 물질로 이루어진 그룹으로부터 제조되는 선별기.
- 외부 특성을 기반으로 물체의 궤도를 지속적으로 추적하여 단일 경로에서 여러 등급으로 물체를 선별하는 새로운 방법으로서,상기 방법은:
- 청구항 제1항의 선별기를 제공하는 단계
-호퍼에 선별할 물체를 공급하는 단계
-상기 호퍼로부터 공급 유닛으로 물체를 운반하는 단계로, 상기 공급 유닛은 체계적인 방식으로 상기 물체의 공급량을 제어하기 위해 복수의 공급 제어기에 의해 작동 및 제어되며, 상기 공급 제어기는 상기 마스터 제어기를 통해 해당 도관의 센서 네트워크의 네트워크 제어기로부터 신호를 수신하기 때문에 효과적인 공급을 위해 마스터 제어기에 결합되고;
-상기 물체를 상기 공급 유닛으로의 복수의 피더로부터 복수의 해당 광학 유닛으로 운반하는 단계로, 상기 광학 유닛의 복수의 프로그램 가능한 카메라로에 의하여 여러 면(side) 및/또는 여러 각도에서 각 물체를 관찰하는 단계 및 적어도 6개의 방향의 관찰로부터 상기 물체의 이미지를 캡쳐하고 각 물체의 3차원(3D) 을 분석하는 단계가 상기 광학 유닛의 복수의 광원과 함께 각각 상관관계에 있는 상기 카메라에 의하여 수행되고, 추가로 각각의 분석 물체의 정확한 등급을 결정하기 위해 상기 광학 유닛의 상기 카메라에 의해 수행된 캡쳐된 이미지 데이터를 처리하는 단계가 수행되어, 상기 광합 유닛은 각 물체의 정확한 등급을 결정함;
-상기 광학 유닛에 의하여 분석된 각 물체의 정확한 등급과 관련된 신호를 상기 마스터 제어기로 전달하는 단계 및 상기 각각의 광학 유닛에 의해 제공된 신호들에 기초하여 상기 각각의 분석된 물체의 정밀하고 정확한 최종 등급을 결정하기 위해 상기 마스터 제어기에서 상기 광학 유닛으로부터 상기 신호들을 수신하는 단계;
-각각의 상기 도관이 상기 물체를 선별하기 위한 하나의 개별적인 채널로 간주되어 상기 각 광학 유닛으로부터 상응하는 도관으로 물체를 유동시키는 단계로, 물체의 멀티 채널 선별을 용이하게 함;
-상기 각각의 광학 유닛으로부터 대응하는 상기 도관으로 상기 물체를 운반하는 단계, 각각의 도관은 복수의 센서층, 복수의 센서층 제어기, 적어도 하나의 네트워크 제어기를 포함하는 단일 센서 네트워크를 포함하고 상기 도관은 또한 복수의 단일 각이 있는 이젝터 또는 다중 각이 있는 이젝터의 배열을 포함하고, 및 상기 각각의 도관의 상기 복수의 센서층은 실시간으로 각각의 운반 물체의 위치 및 속도를 그의 궤적에서 연속적으로 추적하고, 및 트리거는 실시간으로 각 운반 물체의 위치 및 속도에 관하여 해당 센서층 제어기로 신호를 전달함;
-해당 도관의 상기 센서 네트워크의 상기 네트워크 제어기에 의해 상기 대응하는 도관에서 실시간으로 각 운반 물체의 정확한 위치 및 속도를 정확하게 결정하기 위해 실시간으로 각 운반 물체의 위치 및 속도와 관련된 신호를 해당 도관의 각 센서층 제어기로부터 수신하는 단계;
-각각의 도관의 각각의 상기 네트워크 제어기가 상기 마스터 제어기에 결합하기 때문에 상기 센서 네트워크의 해당 네트워크 제어기로부터 상기 마스터 제어기로 상기 신호를 전송하는 단계;
-상기 마스터 제어기에 의해 해당 도관의 센서 네트워크의 네트워크 제어기로부터 신호를 수신하는 단계로, 상기 물체가 해당 상기 센서층의 복수의 빛을 차단하면, 각각의 운반 물체의 선별지점에 도착하기 전에 해당 도관 내 그의 궤적에서 상기 각각의 운반 물체의 선별 지점을 결정함으로써 상기 각각의 운반 물체의 정확한 위치 및 속도를 실시간으로 정확하게 예측할 수 있음;
-각각의 상기 운반 물체가 해당 도관으로부터 대응하는 복수의 운반 물체를 배출하기 위한 선별 지점에 도달할 때 상기 마스터 제어기에 의해 상기 운반 물체의 배출과 관련된 신호를 각 도관의 단일 각이 있는 이젝터 배열 또는 다중 각이 있는 이젝터 배열로 송신하는 단계;
-상기 단일 각이 있는 이젝터 배열 또는 다중 각이 있는 이젝터 배열에서 각 운반 물체의 정확하 위치 및 속도에 관한 신호를 마스터 제어기로부터 수신하는 단계;
-각 상기 운반 물체가 해당 도관의 선별 지점에 도착할 때 해당 도관의 선별 지점 근처에서 물체의 궤적을 지나 상기 운반 물체를 향하여 소정의 기간동안 고압 공기 또는 고압 유체의 분사를 유도하고 해당 도관의 특정 이젝터의 밸브를 여는(open) 단계;
- 상기 대응하는 도관으로부터 각각의 정확한 특정 등급의 운반 물체를 배출하는 단계로, 상기 운반 물체는 용이한 선별을 위해 각각의 해당 이젝터에 대해 반대 방향으로 상기 각 도관 전체에 위치하는 상기 진공 생성기의 도움으로 배출되고, 및 상기 공기 또는 유체의 압력은 선별되는 상기 운반 물체의 특정 중력 및 중공을 포함하는 상기 특성에 따라 변화함;
-상기 이젝터에 의해 상기 대응하는 도관으로부터 복수의 정확한 등급의 상기 물체를 배출하고 복수의 수집 슈트를 통해 운반하는 단계; 및
-단일 경로에서 복수의 등급을 갖는 상기 물체 복수의 수집 슈트를 복수의 수집 위치로 수집하는 단계를 포함하는 방법.
- 제8항에 있어서,
상기 운반 물체의 상기 배출 단계는 수집 위치에서 상기 이젝터의 측면 또는 상기 진공 생성기에 맞춤형 매니폴드를 부가하여 상기 운반 물체를 위해 정제된(refined) 선별 위치를 제공함으로써 개선되는 것인 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IN1291/CHE/2015 | 2015-03-16 | ||
| IN1291CH2015 | 2015-03-16 | ||
| PCT/IN2016/000068 WO2016147203A1 (en) | 2015-03-16 | 2016-03-16 | A novel intelligent grading machine with trajectory tracking sensor network and a process thereof |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170137736A true KR20170137736A (ko) | 2017-12-13 |
Family
ID=56918472
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177028264A KR20170137736A (ko) | 2015-03-16 | 2016-03-16 | 궤도 추적 센서 네트워크를 구비한 새로운 지능형 선별기 및 그 방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10099259B2 (ko) |
| EP (1) | EP3271082B1 (ko) |
| KR (1) | KR20170137736A (ko) |
| CN (1) | CN107683183A (ko) |
| AU (1) | AU2016231751B2 (ko) |
| BR (1) | BR112017019707A2 (ko) |
| WO (1) | WO2016147203A1 (ko) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10021369B2 (en) | 2016-07-26 | 2018-07-10 | Qcify Inc. | In-flight 3D inspector |
| WO2019011809A1 (en) * | 2017-07-10 | 2019-01-17 | Arlanxeo Deutschland Gmbh | INSPECTION APPARATUS AND METHOD FOR VISUAL INSPECTION OF ELASTIC PARTICLES |
| SE1751115A1 (en) * | 2017-09-14 | 2019-03-15 | Bomill Ab | Object conveying and/or sorting system |
| KR102109698B1 (ko) * | 2017-12-08 | 2020-05-12 | 한국로봇융합연구원 | 영상처리분석을 이용한 대상물 자동 선별, 분류 시스템 및 자동선별 분류방법 |
| CN108435584B (zh) * | 2018-03-13 | 2024-04-16 | 深圳市豪富特自动化设备有限公司 | 蜂鸣器检测机 |
| US11673166B2 (en) * | 2018-03-14 | 2023-06-13 | Monsanto Technology Llc | Seed imaging |
| US11724287B2 (en) | 2018-06-11 | 2023-08-15 | Monsanto Technology Llc | Seed sorting |
| WO2020167669A1 (en) | 2019-02-11 | 2020-08-20 | John Bean Technologies Corporation | Pick and throw harvesting |
| PL3763448T3 (pl) * | 2019-07-12 | 2022-11-21 | BEUMER Group GmbH & Co. KG | Sposób i urządzenie do wytwarzania i utrzymywania przyporządkowania danych o przedmiocie oraz położeniu przedmiotu |
| US11707768B2 (en) * | 2020-10-02 | 2023-07-25 | University Of Georgia Research Foundation, Inc. | Systems and methods for peanut sorting and grading |
| CN113000378B (zh) * | 2021-02-09 | 2022-08-12 | 北京航化节能环保技术有限公司 | 一种低真空度防爆型超细颗粒分级装置 |
| EP4286063A1 (de) * | 2022-05-30 | 2023-12-06 | Binder + Co AG | Sortiervorrichtung |
| US11919043B1 (en) * | 2023-07-26 | 2024-03-05 | King Faisal University | Intelligent sorting for date palm fruit |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL133583C (ko) * | 1961-01-19 | 1900-01-01 | ||
| US3650397A (en) | 1970-11-19 | 1972-03-21 | Sensors Inc | System for inspecting and classifying objects such as screws, bolts and the like while in motion |
| US3773172A (en) | 1972-03-21 | 1973-11-20 | Research Corp | Blueberry sorter |
| US4513868A (en) | 1981-01-19 | 1985-04-30 | Gunson's Sortex Limited | Sorting machine |
| GB8425273D0 (en) * | 1984-10-05 | 1984-11-14 | Spandrel Etab | Signal responsive to parameter of objects |
| DE3481488D1 (de) * | 1984-10-17 | 1990-04-12 | Xeltron Sa | Methode und geraet zum sortieren von gegenstaenden. |
| ATE61947T1 (de) * | 1985-10-29 | 1991-04-15 | Roger Frederick Bailey | Optisches sortiergeraet. |
| DE3614400C1 (de) * | 1986-04-25 | 1987-08-06 | Justus Technik Gmbh | Verfahren und Vorrichtung zum Steuern einer Farbsortiermaschine |
| DE3789015T2 (de) * | 1987-02-14 | 1994-06-23 | Satake Eng Co Ltd | Apparat zum Sortieren nach Farbe. |
| US4878582A (en) * | 1988-03-22 | 1989-11-07 | Delta Technology Corporation | Multi-channel bichromatic product sorter |
| US5012116A (en) * | 1989-10-12 | 1991-04-30 | Russell John P | System for inspecting bearing balls for defects |
| IL101612A0 (en) * | 1992-04-16 | 1992-12-30 | Electro Optics Ind Ltd | Apparatus and method for inspecting articles such as agricultural produce |
| US5700692A (en) * | 1994-09-27 | 1997-12-23 | Becton Dickinson And Company | Flow sorter with video-regulated droplet spacing |
| DE19516569B4 (de) * | 1995-05-05 | 2009-04-23 | TRüTZSCHLER GMBH & CO. KG | Vorrichtung zum Abscheiden von Fremdstoffen, z. B. metallischer Verunreinigungen, aus einer Fasertransportstrecke in der Spinnereivorbereitung |
| US6031931A (en) * | 1996-03-15 | 2000-02-29 | Sony Corporation | Automated visual inspection apparatus |
| JPH10297754A (ja) * | 1997-04-30 | 1998-11-10 | Mitsubishi Heavy Ind Ltd | 自動仕分け装置 |
| US20030221935A1 (en) | 1998-12-01 | 2003-12-04 | Crisplant A/S | Conveyor/sorter system, a loading conveyor and a control system for such conveyors |
| JP2002205815A (ja) * | 2001-01-09 | 2002-07-23 | Maki Mfg Co Ltd | 農産物の均等分散装置 |
| US6814211B2 (en) | 2001-07-12 | 2004-11-09 | Satake Usa, Inc. | Slide for sorting machine |
| US6787724B2 (en) | 2001-08-24 | 2004-09-07 | Attica Automation | Sorting machine |
| WO2006083635A2 (en) | 2005-01-28 | 2006-08-10 | Satake Usa, Inc. | Multiport ejector for use with sorter |
| JP4908942B2 (ja) * | 2006-06-22 | 2012-04-04 | 黒崎播磨株式会社 | 耐火原料の選別方法 |
| WO2008101150A1 (en) | 2007-02-15 | 2008-08-21 | Satake Usa, Inc. | Product flow control apparatus for sorting |
| JP5082676B2 (ja) * | 2007-08-23 | 2012-11-28 | 株式会社サタケ | 光学式穀物選別機 |
| US8247724B2 (en) | 2008-10-20 | 2012-08-21 | Buhler Sortex Ltd. | Chutes for sorting and inspection apparatus |
| US8281931B2 (en) * | 2009-09-18 | 2012-10-09 | Key Technology, Inc. | Apparatus and method for post-threshing inspection and sorting of tobacco lamina |
| WO2011064795A2 (en) * | 2009-11-24 | 2011-06-03 | Goda Venkata Ramana | Device for sorting contaminants from minerals, and method thereof |
| US8417375B2 (en) * | 2010-05-13 | 2013-04-09 | Data Detection Technologies Ltd. | Counting machine for discrete items |
| JP5846348B2 (ja) * | 2011-04-04 | 2016-01-20 | 株式会社サタケ | 光学式選別機 |
| US9316537B2 (en) * | 2011-06-29 | 2016-04-19 | Minesense Technologies Ltd. | Sorting materials using a pattern recognition, such as upgrading nickel laterite ores through electromagnetic sensor-based methods |
| US8937282B2 (en) * | 2012-10-26 | 2015-01-20 | Fei Company | Mineral identification using mineral definitions including variability |
| CN103286081B (zh) * | 2013-05-07 | 2015-04-22 | 浙江工业大学 | 基于单目多视角机器视觉的钢珠表面缺陷在线自动分选装置 |
| CN104138854B (zh) * | 2014-06-25 | 2016-06-22 | 山东大学 | 基于伪双能射线成像的矿石分选系统及方法 |
| JP6688234B2 (ja) | 2014-06-30 | 2020-04-28 | クアリーセンス アーゲー | 真空ベルトを備えた搬送装置 |
| WO2016157216A1 (en) * | 2015-03-31 | 2016-10-06 | Nanopix Iss (P) Ltd. | A novel color based optical grading system with multi reflectance and multi-angle views |
-
2016
- 2016-03-16 CN CN201680028290.8A patent/CN107683183A/zh not_active Withdrawn
- 2016-03-16 KR KR1020177028264A patent/KR20170137736A/ko unknown
- 2016-03-16 US US15/558,333 patent/US10099259B2/en active Active
- 2016-03-16 WO PCT/IN2016/000068 patent/WO2016147203A1/en active Application Filing
- 2016-03-16 BR BR112017019707A patent/BR112017019707A2/pt not_active IP Right Cessation
- 2016-03-16 AU AU2016231751A patent/AU2016231751B2/en active Active
- 2016-03-16 EP EP16764356.8A patent/EP3271082B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10099259B2 (en) | 2018-10-16 |
| EP3271082B1 (en) | 2020-05-06 |
| AU2016231751B2 (en) | 2020-12-24 |
| CN107683183A (zh) | 2018-02-09 |
| EP3271082A4 (en) | 2018-11-07 |
| AU2016231751A1 (en) | 2017-10-19 |
| WO2016147203A1 (en) | 2016-09-22 |
| BR112017019707A2 (pt) | 2018-09-04 |
| EP3271082A1 (en) | 2018-01-24 |
| US20180065157A1 (en) | 2018-03-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170137736A (ko) | 궤도 추적 센서 네트워크를 구비한 새로운 지능형 선별기 및 그 방법 | |
| JP5846348B2 (ja) | 光学式選別機 | |
| US7775369B2 (en) | Separating device and sorting apparatus with two-dimensionals array of nozzles and method of sorting objects | |
| US8827082B2 (en) | Apparatus for inspecting and sorting articles traveling on a conveyor | |
| US20180264522A1 (en) | Sorter | |
| US4889241A (en) | Discharge chute with variable slope bottom for fragile article sorting system | |
| US20070012604A1 (en) | Sorter | |
| EP2726221B1 (en) | Inspection apparatus with alternate side illumination | |
| US20090306816A1 (en) | Sequential Selective Sorting Method and Installation for Implementing it | |
| WO2021161341A1 (en) | System for modular multi-grade sorting and a method thereof | |
| US10328464B2 (en) | Method and apparatus for sorting heterogeneous material | |
| EP1838464B1 (en) | Method and apparatus for sorting a gas-driven stream of generally flat and light-weight articles | |
| US20140284255A1 (en) | Sorting and inspection apparatus and method with determination of product velocity | |
| EP2907592A1 (en) | Sorting apparatus and method | |
| JP4993406B2 (ja) | 飛行物選別装置 | |
| CN201357150Y (zh) | 白瓜子色选机 | |
| JP4020215B2 (ja) | 分類装置 | |
| US10049440B2 (en) | Object detection apparatus | |
| JP2023543555A (ja) | 効率的な資源回収施設 | |
| JP3238689U (ja) | X線異物除去装置 | |
| JPH0231873A (ja) | 角切り野菜の色彩選別機 | |
| JPH0338284A (ja) | 根菜類選別機 |