KR20170017117A - 신호세기에 기반한 신호 발생위치 추정 방법 - Google Patents
신호세기에 기반한 신호 발생위치 추정 방법 Download PDFInfo
- Publication number
- KR20170017117A KR20170017117A KR1020150110557A KR20150110557A KR20170017117A KR 20170017117 A KR20170017117 A KR 20170017117A KR 1020150110557 A KR1020150110557 A KR 1020150110557A KR 20150110557 A KR20150110557 A KR 20150110557A KR 20170017117 A KR20170017117 A KR 20170017117A
- Authority
- KR
- South Korea
- Prior art keywords
- signal
- measurement point
- intensity
- generation position
- signal strength
- Prior art date
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/14—Systems for determining distance or velocity not using reflection or reradiation using ultrasonic, sonic, or infrasonic waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/16—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/78—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using electromagnetic waves other than radio waves
- G01S3/781—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/80—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using ultrasonic, sonic or infrasonic waves
- G01S3/801—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/18—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using ultrasonic, sonic, or infrasonic waves
- G01S5/20—Position of source determined by a plurality of spaced direction-finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/18—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using ultrasonic, sonic, or infrasonic waves
- G01S5/30—Determining absolute distances from a plurality of spaced points of known location
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
본 발명의 일 실시 예에 따른 신호세기에 기반한 신호 발생위치 추정 방법은, 제1 측정지점에서 신호의 발생위치로부터 전파된 상기 신호의 세기인 제1 신호세기를 측정하는 단계, 상기 제1 측정지점과 구분되는 제2 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제2 신호세기를 측정하는 단계, 상기 발생위치에서 상기 제1 측정지점과 상기 제2 측정지점까지 상기 신호가 전파된 매질의 감쇄상수를 산출하는 단계, 및 상기 제1 신호세기, 상기 제2 신호세기 및 상기 감쇄상수를 이용하여 상기 발생위치를 추정하는 단계를 포함하고, 상기 제1 측정지점, 상기 제2 측정지점 및 상기 발생위치는 하나의 직선상에 있는 것을 특징으로 한다.
Description
본 발명은 신호세기에 기반한 신호 발생위치 추정 방법에 관한 것으로서, 보다 상세하게는 신호의 세기와 감쇄상수를 이용하여 신호의 발원지를 추정하는 신호세기에 기반한 신호 발생위치 추정 방법에 관한 것이다.
음파와 같은 신호는 고체, 액체, 기체 또는 진공 등과 같은 매질을 통해 사방으로 전파된다. 그리고, 해당 매질의 특성에 따라 음파와 같은 신호의 전파 특성은 각각 달라진다.
일반적으로 신호가 발생된 발원지의 신호의 크기를 아는 것은 어려운 일이며 알 수 없으며, 또한 자유공간이 아닌, 고체, 액체 및 기체 등의 다양한 매질을 통해 전파되는 신호의 전달 특성을 파악하기는 쉽지 한다. 이 뿐만 아니라, 신호가 전달되는 경로의 온도 및 장애물 등 다양한 외부적인 요건에 의해 신호의 전파 특성이 변할 수 있다.
상기와 같은 문제점을 해결하기 위하여, 본 발명의 목적은 신호가 전파되는 매질의 자세한 전파 특성을 파악하지 않고서도, 감쇄상수 및 측정되는 신호의 세기를 이용하여 해당 신호의 발생위치를 추정하는 신호세기에 기반한 신호 발생위치 추정 방법을 제공하는 데 있다.
본 발명의 일 실시 예에 따른 신호세기에 기반한 신호 발생위치 추정 방법은, 제1 측정지점에서 신호의 발생위치로부터 전파된 상기 신호의 세기인 제1 신호세기를 측정하는 단계, 상기 제1 측정지점과 구분되는 제2 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제2 신호세기를 측정하는 단계, 상기 발생위치에서 상기 제1 측정지점과 상기 제2 측정지점까지 상기 신호가 전파된 매질의 감쇄상수를 산출하는 단계, 및 상기 제1 신호세기, 상기 제2 신호세기 및 상기 감쇄상수를 이용하여 상기 발생위치를 추정하는 단계를 포함하고, 상기 제1 측정지점, 상기 제2 측정지점 및 상기 발생위치는 하나의 직선상에 있는 것을 특징으로 한다.
실시 예에 있어서, 상기 발생위치가 x이고, 상기 제1 측정지점이 x1이고, 상기 제2 측정지점이 x2이고, 상기 제1 신호세기가 a이고, 상기 제2 신호세기가 b이고, 상기 감쇄상수가 α이면, 상기 x, x1, x2, a, b 및 α는, 아래 수학식  을 만족하는 것을 특징으로 한다.
을 만족하는 것을 특징으로 한다.
본 발명의 다른 일 실시 예에 따른 신호세기에 기반한 신호 발생위치 추정 방법은 제1 측정지점에서 신호의 발생위치로부터 전파된 상기 신호의 세기인 제1 신호세기를 측정하는 단계, 상기 제1 측정지점과 구분되는 제2 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제2 신호세기를 측정하는 단계, 상기 제1 측정지점 및 상기 제2 측정지점과 구분되고, 상기 제1 측정지점과 상기 제2 측정지점이 연결되는 직선 상에 위치하지 않는 제3 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제3 신호세기를 측정하는 단계, 상기 발생위치에서 상기 제1 측정지점, 상기 제2 측정지점 및 상기 제3 측정지점까지 상기 신호가 전파된 매질의 감쇄상수를 산출하는 단계, 및 상기 제1 신호세기, 상기 제2 신호세기, 상기 제3 신호세기 및 상기 감쇄상수를 이용하여 상기 발생위치를 추정하는 단계를 포함하는 것을 특징으로 한다.
실시 예에 있어서, 상기 발생위치가 x이고, 상기 제1 측정지점이 x1이고, 상기 제2 측정지점이 x2이고, 상기 제3 측정지점이 x3이고, 상기 제1 신호세기가 a이고, 상기 제2 신호세기가 b이고, 상기 제3 신호세기가 c이고, 상기 감쇄상수가 α이면, 상기 x, x1, x2, x3, a, b, c 및 α는, 아래 두 수학식  을 만족하는 것을 특징으로 한다.
을 만족하는 것을 특징으로 한다.
본 발명의 또 다른 일 실시 예에 따른 신호세기에 기반한 신호 발생위치 추정 방법은 제1 측정지점에서 신호의 발생위치로부터 전파된 상기 신호의 세기인 제1 신호세기를 측정하는 단계, 상기 제1 측정지점과 구분되는 제2 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제2 신호세기를 측정하는 단계, 상기 제1 측정지점 및 상기 제2 측정지점과 구분되고, 상기 제1 측정지점과 상기 제2 측정지점이 연결되는 직선 상에 위치하지 않는 제3 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제3 신호세기를 측정하는 단계, 상기 제1 측정지점, 상기 제2 측정지점 및 상기 제3 측정지점과 구분되고, 상기 제1 측정지점과 상기 제2 측정지점이 연결되는 직선 상에 위치하지 않는 제4 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제4 신호세기를 측정하는 단계, 상기 발생위치에서 상기 제1 측정지점, 상기 제2 측정지점, 상기 제3 측정지점 및 상기 제4 측정지점까지 상기 신호가 전파된 매질의 감쇄상수를 산출하는 단계, 및 상기 제1 신호세기, 상기 제2 신호세기, 상기 제3 신호세기, 상기 제4 신호세기 및 상기 감쇄상수를 이용하여 상기 발생위치를 추정하는 단계를 포함하는 것을 특징으로 한다.
실시 예에 있어서, 상기 발생위치가 x이고, 상기 제1 측정지점이 x1이고, 상기 제2 측정지점이 x2이고, 상기 제3 측정지점이 x3이고, 상기 제4 측정지점이 x4이고, 상기 제1 신호세기가 a이고, 상기 제2 신호세기가 b이고, 상기 제3 신호세기가 c이고, 상기 제4 신호세기가 d이고, 상기 감쇄상수가 α이면, 상기 x, x1, x2, x3, x4, a, b, c, d 및 α는, 아래 3개의 수학식  을 만족하는 것을 특징으로 한다.
을 만족하는 것을 특징으로 한다.
본 발명에 따른 신호세기에 기반한 신호 발생위치 추정 방법은 신호가 전파되는 매질의 자세한 전파 특성을 파악하지 않고서도, 감쇄상수 및 측정되는 신호의 세기를 이용하여 해당 신호의 발생위치를 추정할 수 있다.
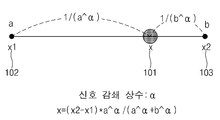
도 1은 본 발명의 일 실시 예에 따라 직선의 경우 신호가 발생된 발생위치를 추정하는 방법을 나타내는 도면이다.
도 2는 본 발명의 다른 일 실시 예에 따라 평면의 경우 신호가 발생된 발생위치를 추정하는 방법을 나타내는 도면이다.
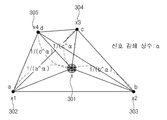
도 3은 본 발명의 또 다른 일 실시 예에 따라 공간의 경우 신호가 발생된 발생위치를 추정하는 방법을 나타내는 도면이다.
도 2는 본 발명의 다른 일 실시 예에 따라 평면의 경우 신호가 발생된 발생위치를 추정하는 방법을 나타내는 도면이다.
도 3은 본 발명의 또 다른 일 실시 예에 따라 공간의 경우 신호가 발생된 발생위치를 추정하는 방법을 나타내는 도면이다.
본 발명의 이점 및 특징, 그리고 그것을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시 예들을 통해 설명될 것이다. 그러나 본 발명은 여기에서 설명되는 실시 예들에 한정되지 않고 다른 형태로 구체화될 수도 있다. 단지, 본 실시 예들은 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 본 발명의 기술적 사상을 용이하게 실시할 수 있을 정도로 상세히 설명하기 위하여 제공되는 것이다.
도면들에 있어서, 본 발명의 실시 예들은 도시된 특정 형태로 제한되는 것이 아니며 명확성을 기하기 위하여 과장된 것이다. 본 명세서에서 특정한 용어들이 사용되었으나. 이는 본 발명을 설명하기 위한 목적에서 사용된 것이며, 의미 한정이나 특허 청구 범위에 기재된 본 발명의 권리 범위를 제한하기 위하여 사용된 것은 아니다.
본 명세서에서 '및/또는' 이란 표현은 전후에 나열된 구성요소들 중 적어도 하나를 포함하는 의미로 사용된다. 또한, '연결되는/결합되는' 이란 표현은 다른 구성요소와 직접적으로 연결되거나 다른 구성요소를 통해 간접적으로 연결되는 것을 포함하는 의미로 사용된다. 본 명세서에서 단수형은 문구에서 특별히 언급하지 않는 한 복수형도 포함한다. 또한, 명세서에서 사용되는 '포함한다' 또는 '포함하는'으로 언급된 구성요소, 단계, 동작 및 소자는 하나 이상의 다른 구성요소, 단계, 동작 및 소자의 존재 또는 추가를 의미한다.
이하, 도면들을 참조하여 본 발명의 실시 예에 대해 상세히 설명하기로 한다.
신호의 전파 특성 중 신호의 세기에 관하여 살펴보면, 신호가 전파되는 매일이 자유공간인 경우에는 전파되는 신호의 세기가 전파되는 거리의 제곱에 반비례하면서 사방으로 전파된다. 따라서 해당 신호가 전파되는 매질에 따른 전파의 전달 특성이 알려져 있다면, 신호가 감지된 장소에서 측정된 해당 신호의 세기 및 전파된 매질의 특성을 알고 있다면 해당 신호가 발생한 위치의 추정이 가능하다. 즉, 자유공간의 경우, 거리의 제곱에 비례하여 신호의 크기가 작아지므로, 발생된 신호의 크기를 알고 있다면, 측정된 신호와의 차이를 이용하여 위치 추정을 할 수 있다.
본 발명은 2차원 또는 3차원 공간의 특성에 따라 다수의 위치에서 감지된 신호의 세기를 측정하고, 해당 신호가 전파되어 온 매질의 감쇄 상수 만을 이용하여, 해당 신호가 발생한 발생위치를 추정할 수 있다. 또한 본 발명은 신호가 전파되는 매질이 기체인 경우뿐만 아니라, 액체의 경우에도 수중 청음기(hydrophone)를 이용하여, 신호의 세기의 측정이 가능하므로 신호의 발생위치를 추정할 수 있으며, 고체의 경우에도 마찬가지로 발생위치의 추정이 가능하다.
도 1은 본 발명의 일 실시 예에 따라 직선의 경우 신호가 발생된 발생위치를 추정하는 방법을 나타내는 도면이다.
도 1을 참조하면, 전파된 신호의 세기가 측정된 장소인 제1 측정지점(102) 및 제2 측정지점(103)은 각각 x1 및 x2이고, 해당 신호의 발원위치는 x이다. 그리고 제1 측정지점(102) 및 제2 측정지점(103)에서 측정된 신호의 세기인 제1 신호세기 및 제2 신호세기는 각각 a 및 b이다.
먼저, 해당 신호의 발생위치(101)로부터 제1 측정지점(102)까지 전파된 신호의 세기인 제1 신호세기(a)를 제1 측정지점(102)에서 측정하고, 해당 신호의 발생위치(101)로부터 제2 측정지점(103)까지 전파된 신호의 세기인 제2 신호세기(b)를 제2 측정지점(103)에서 측정한다. 여기서, 제2 측정지점(103)은 제1 측정지점(102)과 구분되는 별도의 측정지점이다. 또한, 제1 측정지점(102), 제2 측정지점(103) 및 발생위치(101)는 하나의 직선상에 위치하는 것이 바람직하다.
이후, 발생위치(101)에서 제1 측정지점(102)과 제2 측정지점(103)까지 해당 신호가 전파된 매질의 감쇄상수(α)를 산출한다. 여기서, 제1 측정지점(102) 및 제2 측정지점(103)에서 측정되는 신호는 동일한 매질을 통하여 전파된 것이 바람직하다.
이후, 제1 신호세기(a), 제2 신호세기(b) 및 감쇄상수(α)를 이용하여 해당 신호의 발생위치(101)를 추정한다. 신호의 발생위치(101)를 추정하는 내용을 보다 구체적인 예와 함께 설명한다.
발생위치(101)로부터 발생되어 제1 측정지점(102) 및 제2 측정지점(103)로 전파되어 제1 측정지점(102) 및 제2 측정지점(103)에서 측정되는 해당 신호가 동일한 매질을 통하여 전파된 경우, 동일한 전파 특성을 가지게 된다. 여기서, 해당 매질의 감쇄상수(α)를 2라고 가정하면, 측정된 제1 신호세기(a) 및 제2 신호세기(b)의 제곱(감쇄상수; α)과 반비례한 위치에서 신호가 발원되는 것으로 발생위치를 산출할 수 있다.
즉, 제1 측정지점(102) 및 제2 측정지점(103)에서 측정된 신호의 세기의 비가 a:b 이므로, 제1 측정지점(102), 제2 측정지점(103) 및 발생위치(101)을 연결하는 직선 상에서 해당 신호의 발생위치(101)는 1/(a*a):1/(b*b) 지점에 있다고 산출할 수 있다. 만일, 제1 측정지점(x1; 102)에서 측정된 제1 신호세기(a)가 1이고, 제2 측정지점(x2; 103)에서 측정된 제2 신호세기(b)가 2라고 하면, 해당 신호의 발생위치(x; 101)는 제1 측정지점(x1; 102) 및 제2 측정지점(x2; 103)의 1:1/4 위치에 해당하게 된다.
이를 일반화하여 설명하면, 해당 신호의 발생위치(x), 제1 측정지점(x1), 제2 측정지점(x2), 제1 신호세기(a), 제2 신호세기(b), 및 감쇄상수(α)는, 아래 수학식 1을 만족한다.
[수학식 1]
여기서, |x|는 x의 거리를 의미한다. 또한, 직선에서는 x가 하나의 미지수로 표현되고 방정식이 하나이므로 본 방정식을 일반적으로 그 해를 구할 수 있다.
여기까지는 신호의 발생위치가 전파된 신호의 세기를 측정하는 측정위치와 하나의 직선상에 있을 때의 경우이고, 2차원 평면에서도 신호의 발생위치를 유사한 방법으로 추정할 수 있다.
도 2는 본 발명의 다른 일 실시 예에 따라 평면의 경우 신호가 발생된 발생위치를 추정하는 방법을 나타내는 도면이다.
도 2를 참조하면, 전파된 신호의 세기가 측정된 장소인 제1 측정지점(202), 제2 측정지점(203) 및 제3 측정지점(204)은 각각 x1, x2 및 x3이고, 해당 신호의 발원위치는 x이다. 그리고 제1 측정지점(202), 제2 측정지점(203) 및 제3 측정지점(204)에서 측정된 신호의 세기인 제1 신호세기, 제2 신호세기 및 제3 신호세기는 각각 a, b 및 c이다.
먼저, 해당 신호의 발생위치(201)로부터 제1 측정지점(202)까지 전파된 신호의 세기인 제1 신호세기(a)를 제1 측정지점(202)에서 측정하고, 해당 신호의 발생위치(201)로부터 제2 측정지점(203)까지 전파된 신호의 세기인 제2 신호세기(b)를 제2 측정지점(203)에서 측정하고, 해당 신호의 발생위치(201)로부터 제3 측정지점(204)까지 전파된 신호의 세기인 제3 신호세기(c)를 제3 측정지점(204)에서 측정한다. 여기서, 제2 측정지점(203)은 제1 측정지점(202)과 구분되는 별도의 측정지점이고, 제3 측정지점(204)은 제1 측정지점(202) 및 제2 측정지점(203)과 구분되고, 제1 측정지점(202)과 제2 측정지점(203)이 연결되는 직성상에 위치하지 않는다.
이후, 발생위치(201)에서 제1 측정지점(202), 제2 측정지점(203) 및 제3 측정지점(204)까지 해당 신호가 전파된 매질의 감쇄상수(α)를 산출한다. 여기서, 제1 측정지점(202), 제2 측정지점(203) 및 제3 측정지점(204)에서 측정되는 신호는 동일한 매질을 통하여 전파된 것이 바람직하다.
이후, 제1 신호세기(a), 제2 신호세기(b), 제3 신호세기(c) 및 감쇄상수(α)를 이용하여 해당 신호의 발생위치(201)를 추정한다. 신호의 발생위치(201)를 추정하는 내용을 보다 구체적인 예와 함께 설명한다.
발생위치(201)로부터 발생되어 제1 측정지점(202), 제2 측정지점(203) 및 제3 측정지점(204)로 전파되어 제1 측정지점(202), 제2 측정지점(203) 및 제3 측정지점(204)에서 측정되는 해당 신호가 동일한 매질을 통하여 전파된 경우, 동일한 전파 특성을 가지게 된다. 여기서, 해당 매질의 감쇄상수(α)를 2라고 가정하면, 측정된 제1 신호세기(a), 제2 신호세기(b) 및 제3 신호세기(c)의 제곱(감쇄상수; α)과 반비례한 위치에서 신호가 발원되는 것으로 발생위치를 산출할 수 있다.
즉, 제1 측정지점(202) 및 제2 측정지점(203)에서 측정된 신호의 세기의 비가 a:b 이고, 제1 측정지점(202) 및 제3 측정지점(204)에서 측정된 신호의 세기의 비가 a:c 이다. 따라서, 해당 신호의 발생위치(101)는 제1 측정지점(202) 및 제2 측정지점(203)의 관계에서는 1/(a*a):1/(b*b) 지점에 있다고 산출할 수 있고, 제1 측정지점(202) 및 제3 측정지점(204)의 관계에서는 1/(a*a):1/(c*c) 지점에 있다고 산출할 수 있다.
결국, 해당 신호의 발생위치(x), 제1 측정지점(x1), 제2 측정지점(x2), 제3 측정지점(x3), 제1 신호세기(a), 제2 신호세기(b), 제3 신호세기(c) 및 감쇄상수(α)는, 아래 수학식 2 및 3을 만족한다.
[수학식 2]

[수학식 3]

여기서, |x|는 x의 거리를 의미한다. 또한, 평면에서는 x가 두 개의 미지수로 표현되고 방정식이 두 개이므로 본 방정식을 일반적으로 그 해를 구할 수 있다.
여기까지는 신호의 발생위치 및 전파된 신호의 세기를 측정하는 측정위치가 2차원 평면에 있을 때의 경우이고, 3차원 공간에서도 신호의 발생위치를 유사한 방법으로 추정할 수 있다.
도 3은 본 발명의 또 다른 일 실시 예에 따라 공간의 경우 신호가 발생된 발생위치를 추정하는 방법을 나타내는 도면이다.
도 3을 참조하면, 전파된 신호의 세기가 측정된 장소인 제1 측정지점(302), 제2 측정지점(303), 제3 측정지점(304) 및 제4 측정지점(305)은 각각 x1, x2, x3 및 x4이고, 해당 신호의 발원위치는 x이다. 그리고 제1 측정지점(302), 제2 측정지점(303), 제3 측정지점(304) 및 제4 측정지점(305)에서 측정된 신호의 세기인 제1 신호세기, 제2 신호세기, 제3 신호세기 및 제4 신호세기는 각각 a, b, c 및 d이다.
먼저, 해당 신호의 발생위치(301)로부터 제1 측정지점(302)까지 전파된 신호의 세기인 제1 신호세기(a)를 제1 측정지점(302)에서 측정하고, 해당 신호의 발생위치(301)로부터 제2 측정지점(303)까지 전파된 신호의 세기인 제2 신호세기(b)를 제2 측정지점(303)에서 측정하고, 해당 신호의 발생위치(301)로부터 제3 측정지점(304)까지 전파된 신호의 세기인 제3 신호세기(c)를 제3 측정지점(304)에서 측정하고, 해당 신호의 발생위치(301)로부터 제4 측정지점(305)까지 전파된 신호의 세기인 제4 신호세기(d)를 제4 측정지점(305)에서 측정한다. 여기서, 제2 측정지점(303)은 제1 측정지점(302)과 구분되는 별도의 측정지점이고, 제3 측정지점(304) 및 제4 측정지점(305)은 제1 측정지점(302) 및 제2 측정지점(303)과 구분되고, 제1 측정지점(302)과 제2 측정지점(303)이 연결되는 직선 상에 위치하지 않으며, 마찬가지로 제4 측정지점(305)은 제3 측정지점(304)와 구분된다.
이후, 발생위치(301)에서 제1 측정지점(302), 제2 측정지점(303), 제3 측정지점(304) 및 제4 측정지점(305)까지 해당 신호가 전파된 매질의 감쇄상수(α)를 산출한다. 여기서, 제1 측정지점(302), 제2 측정지점(303), 제3 측정지점(304) 및 제4 측정지점(305)에서 측정되는 신호는 동일한 매질을 통하여 전파된 것이 바람직하다.
이후, 제1 신호세기(a), 제2 신호세기(b), 제3 신호세기(c), 제4 신호세기(d) 및 감쇄상수(α)를 이용하여 해당 신호의 발생위치(301)를 추정한다. 신호의 발생위치(301)를 추정하는 내용을 보다 구체적인 예와 함께 설명한다.
발생위치(301)로부터 발생되어 제1 측정지점(302), 제2 측정지점(303), 제3 측정지점(304) 및 제4 측정지점(305)로 전파되어 제1 측정지점(302), 제2 측정지점(303), 제3 측정지점(304) 및 제4 측정지점(305)에서 측정되는 해당 신호가 동일한 매질을 통하여 전파된 경우, 동일한 전파 특성을 가지게 된다. 여기서, 해당 매질의 감쇄상수(α)를 2라고 가정하면, 측정된 제1 신호세기(a), 제2 신호세기(b), 제3 신호세기(c) 및 제4 신호세기(d)의 제곱(감쇄상수; α)과 반비례한 위치에서 신호가 발원되는 것으로 발생위치를 산출할 수 있다.
즉, 제1 측정지점(302) 및 제2 측정지점(303)에서 측정된 신호의 세기의 비가 a:b 이고, 제1 측정지점(302) 및 제3 측정지점(304)에서 측정된 신호의 세기의 비가 a:c 이고, 제1 측정지점(302) 및 제4 측정지점(305)에서 측정된 신호의 세기의 비가 a:d 이다. 따라서, 해당 신호의 발생위치(301)는 제1 측정지점(302) 및 제2 측정지점(303)의 관계에서는 1/(a*a):1/(b*b) 지점에 있다고 산출할 수 있고, 제1 측정지점(302) 및 제3 측정지점(304)의 관계에서는 1/(a*a):1/(c*c) 지점에 있다고 산출할 수 있고, 제1 측정지점(302) 및 제4 측정지점(305)의 관계에서는 1/(a*a):1/(d*d) 지점에 있다고 산출할 수 있다.
결국, 해당 신호의 발생위치(x), 제1 측정지점(x1), 제2 측정지점(x2), 제3 측정지점(x3), 제4 측정지점(x4), 제1 신호세기(a), 제2 신호세기(b), 제3 신호세기(c), 제4 신호세기(d) 및 감쇄상수(α)는, 아래 수학식 4, 5 및 6을 만족한다.
[수학식 4]

[수학식 5]

[수학식 6]

여기서, |x|는 x의 거리를 의미한다. 또한, 공간에서는 x가 세 개의 미지수로 표현되고 방정식이 세 개이므로 본 방정식을 일반적으로 그 해를 구할 수 있다.
이상에 설명된 신호의 세기는 일정한 시간동안 측정된 신호세기의 평균을 구한 평균 신호세기일 수 있다.
결국, 본 발명의 실시 예에 따른 신호세기에 기반한 신호 발생위치 추정 방법에 따르면, 매질에 따른 자세한 전파 특성을 파악할 필요 없이, 직선에서는 발생위치의 파악을 위해서는 두 개의 측정지점에서 신호세기를 측정하고, 평면에서는 발생위치 파악을 위해서는 세 개의 측정지점에서 신호세기를 측정하고, 공간에서는 발생위치 파악을 위해서는 네 개의 측정지점에서 신호 세기를 측정하고, 이와 함께 매질에 따른 감쇄상수를 적용하여 신호가 발생된 발생위치를 추정할 수 있다.
이상에서, 본 발명은 구체적인 실시 예를 통해 설명되고 있으나, 본 발명은 그 범위에서 벗어나지 않는 한도 내에서 여러 가지로 변형할 수 있음은 잘 이해될 것이다. 그러므로, 본 발명의 범위는 상술한 실시 예에 국한되어 정해져서는 안되며, 후술하는 특허청구범위 및 이와 균등한 것들에 의해 정해져야 한다. 상술한 내용을 고려하여 볼 때, 만약 본 발명의 수정 및 변경이 아래의 청구항들 및 동등물의 범주 내에 속한다면, 본 발명이 이 발명의 변경 및 수정을 포함하는 것으로 여겨진다.
Claims (6)
- 제1 측정지점에서 신호의 발생위치로부터 전파된 상기 신호의 세기인 제1 신호세기를 측정하는 단계;
상기 제1 측정지점과 구분되는 제2 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제2 신호세기를 측정하는 단계;
상기 발생위치에서 상기 제1 측정지점과 상기 제2 측정지점까지 상기 신호가 전파된 매질의 감쇄상수를 산출하는 단계; 및
상기 제1 신호세기, 상기 제2 신호세기 및 상기 감쇄상수를 이용하여 상기 발생위치를 추정하는 단계를 포함하고,
상기 제1 측정지점, 상기 제2 측정지점 및 상기 발생위치는 하나의 직선상에 있는 것을 특징으로 하는 신호세기에 기반한 신호 발생위치 추정 방법. - 제 1 항에 있어서,
상기 발생위치가 x이고,
상기 제1 측정지점이 x1이고,
상기 제2 측정지점이 x2이고,
상기 제1 신호세기가 a이고,
상기 제2 신호세기가 b이고,
상기 감쇄상수가 α이면,
상기 x, x1, x2, a, b 및 α는, 아래 수학식
을 만족하는 것을 특징으로 하는 신호세기에 기반한 신호 발생위치 추정 방법. - 제1 측정지점에서 신호의 발생위치로부터 전파된 상기 신호의 세기인 제1 신호세기를 측정하는 단계;
상기 제1 측정지점과 구분되는 제2 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제2 신호세기를 측정하는 단계;
상기 제1 측정지점 및 상기 제2 측정지점과 구분되고, 상기 제1 측정지점과 상기 제2 측정지점이 연결되는 직성상에 위치하지 않는 제3 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제3 신호세기를 측정하는 단계;
상기 발생위치에서 상기 제1 측정지점, 상기 제2 측정지점 및 상기 제3 측정지점까지 상기 신호가 전파된 매질의 감쇄상수를 산출하는 단계; 및
상기 제1 신호세기, 상기 제2 신호세기, 상기 제3 신호세기 및 상기 감쇄상수를 이용하여 상기 발생위치를 추정하는 단계를 포함하는 것을 특징으로 하는 신호세기에 기반한 신호 발생위치 추정 방법. - 제 3 항에 있어서,
상기 발생위치가 x이고,
상기 제1 측정지점이 x1이고,
상기 제2 측정지점이 x2이고,
상기 제3 측정지점이 x3이고,
상기 제1 신호세기가 a이고,
상기 제2 신호세기가 b이고,
상기 제3 신호세기가 c이고,
상기 감쇄상수가 α이면,
상기 x, x1, x2, x3, a, b, c 및 α는, 아래 두 수학식

을 만족하는 것을 특징으로 하는 신호세기에 기반한 신호 발생위치 추정 방법. - 제1 측정지점에서 신호의 발생위치로부터 전파된 상기 신호의 세기인 제1 신호세기를 측정하는 단계;
상기 제1 측정지점과 구분되는 제2 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제2 신호세기를 측정하는 단계;
상기 제1 측정지점 및 상기 제2 측정지점과 구분되고, 상기 제1 측정지점과 상기 제2 측정지점이 연결되는 직성상에 위치하지 않는 제3 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제3 신호세기를 측정하는 단계;
상기 제1 측정지점, 상기 제2 측정지점 및 상기 제3 측정지점과 구분되고, 상기 제1 측정지점과 상기 제2 측정지점이 연결되는 직성상에 위치하지 않는 제4 측정지점에서 상기 신호의 발생위치로부터 전파된 상기 신호의 세기인 제4 신호세기를 측정하는 단계;
상기 발생위치에서 상기 제1 측정지점, 상기 제2 측정지점, 상기 제3 측정지점 및 상기 제4 측정지점까지 상기 신호가 전파된 매질의 감쇄상수를 산출하는 단계; 및
상기 제1 신호세기, 상기 제2 신호세기, 상기 제3 신호세기, 상기 제4 신호세기 및 상기 감쇄상수를 이용하여 상기 발생위치를 추정하는 단계를 포함하는 것을 특징으로 하는 신호세기에 기반한 신호 발생위치 추정 방법. - 제 5 항에 있어서,
상기 발생위치가 x이고,
상기 제1 측정지점이 x1이고,
상기 제2 측정지점이 x2이고,
상기 제3 측정지점이 x3이고,
상기 제4 측정지점이 x4이고,
상기 제1 신호세기가 a이고,
상기 제2 신호세기가 b이고,
상기 제3 신호세기가 c이고,
상기 제4 신호세기가 d이고,
상기 감쇄상수가 α이면,
상기 x, x1, x2, x3, x4, a, b, c, d 및 α는, 아래 3개의 수학식

을 만족하는 것을 특징으로 하는 신호세기에 기반한 신호 발생위치 추정 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150110557A KR20170017117A (ko) | 2015-08-05 | 2015-08-05 | 신호세기에 기반한 신호 발생위치 추정 방법 |
| US15/229,324 US20170038454A1 (en) | 2015-08-05 | 2016-08-05 | Method and system for estimating signal generation position based on signal strength |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150110557A KR20170017117A (ko) | 2015-08-05 | 2015-08-05 | 신호세기에 기반한 신호 발생위치 추정 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170017117A true KR20170017117A (ko) | 2017-02-15 |
Family
ID=58052540
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150110557A KR20170017117A (ko) | 2015-08-05 | 2015-08-05 | 신호세기에 기반한 신호 발생위치 추정 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20170038454A1 (ko) |
| KR (1) | KR20170017117A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170102822A (ko) * | 2016-03-02 | 2017-09-12 | 티이 커넥티비티 센서스 저머니 게엠베하 | 센서들 열에 대한 자석의 포지션을 결정하기 위한 방법 |
| KR20230091230A (ko) | 2021-12-15 | 2023-06-23 | 서울대학교산학협력단 | 유전자 알고리즘 기반의 전파 신호 세기를 이용한 통신노드의 위치추정 방법 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010068885A (ja) * | 2008-09-17 | 2010-04-02 | Canon Inc | 測定装置 |
| US9279878B2 (en) * | 2012-03-27 | 2016-03-08 | Microsoft Technology Licensing, Llc | Locating a mobile device |
| KR20150104346A (ko) * | 2014-03-05 | 2015-09-15 | 서울시립대학교 산학협력단 | 디바이스 간 배치 정보 계산 시스템 및 배치 정보 계산 방법 |
-
2015
- 2015-08-05 KR KR1020150110557A patent/KR20170017117A/ko unknown
-
2016
- 2016-08-05 US US15/229,324 patent/US20170038454A1/en not_active Abandoned
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170102822A (ko) * | 2016-03-02 | 2017-09-12 | 티이 커넥티비티 센서스 저머니 게엠베하 | 센서들 열에 대한 자석의 포지션을 결정하기 위한 방법 |
| KR20230091230A (ko) | 2021-12-15 | 2023-06-23 | 서울대학교산학협력단 | 유전자 알고리즘 기반의 전파 신호 세기를 이용한 통신노드의 위치추정 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170038454A1 (en) | 2017-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6639782B2 (ja) | ドップラーレーダー試験システム | |
| JP2019525189A (ja) | 無線電気通信ネットワーク内のユーザ機器の位置検出 | |
| WO2009117360A3 (en) | Methods and systems for determining coordinates of an underwater seismic component in a reference frame | |
| WO2015073905A3 (en) | Backscatter estimation using progressive self interference cancellation | |
| RU2488133C1 (ru) | Гидроакустический комплекс для обнаружения движущегося источника звука, измерения азимутального угла на источник и горизонта источника звука в мелком море | |
| RU2484492C1 (ru) | Гидроакустический комплекс для измерения координат источника звука в мелком море | |
| RU2474836C1 (ru) | Гидроакустический комплекс для измерения азимутального угла на источник звука в мелком море | |
| JP2018109601A5 (ko) | ||
| KR20170054175A (ko) | 미식별 수중신호 위치의 추정 방법 및 시스템 | |
| KR20170017117A (ko) | 신호세기에 기반한 신호 발생위치 추정 방법 | |
| KR101086304B1 (ko) | 로봇 플랫폼에 의해 발생한 반사파 제거 신호처리 장치 및 방법 | |
| WO2015067378A9 (de) | Messvorrichtung zur ermittlung eines abstandes in einer leitungsstruktur | |
| JP2011196901A5 (ko) | ||
| KR101386641B1 (ko) | 서로 다른 종류의 파동의 전파속도 차이를 이용한 거리 추정 장치 및 거리 추정 방법 | |
| RU2476899C1 (ru) | Гидроакустический комплекс для измерения азимутального угла и горизонта источника звука в мелком море | |
| KR101241926B1 (ko) | 위상차 오차 추정에 의한 3차원 인터페로미터 어레이용 레이돔의 적합성 판정방법 | |
| JP5737754B2 (ja) | 津波検出システムおよび津波検出方法 | |
| KR20170105338A (ko) | 수상 이동체 내의 소음원 위치 추정 방법 | |
| JP6396664B2 (ja) | 位置推定装置 | |
| KR101478297B1 (ko) | 4개 고주파 안테나 센서를 이용한 펄스형태의 고주파 신호 발생 위치 추정 시스템 및 위치 추정 알고리즘 | |
| KR101149518B1 (ko) | 부유식 구조물의 위치 추정 장치 및 방법 | |
| CN111337881B (zh) | 一种利用螺旋桨噪声的水下目标探测方法 | |
| JP5964927B2 (ja) | 超音波診断装置 | |
| JP2014235049A (ja) | 波頭速度分布推定装置、波頭速度分布推定方法、及び波頭速度分布推定プログラム | |
| JP5716219B1 (ja) | 位置推定方法及び位置推定装置 |