KR20160097188A - 다양한 흐름 변형에 의한 흡입된 입자 탐지 - Google Patents
다양한 흐름 변형에 의한 흡입된 입자 탐지 Download PDFInfo
- Publication number
- KR20160097188A KR20160097188A KR1020167010728A KR20167010728A KR20160097188A KR 20160097188 A KR20160097188 A KR 20160097188A KR 1020167010728 A KR1020167010728 A KR 1020167010728A KR 20167010728 A KR20167010728 A KR 20167010728A KR 20160097188 A KR20160097188 A KR 20160097188A
- Authority
- KR
- South Korea
- Prior art keywords
- sampling
- air
- detector
- sample
- inlet
- Prior art date
Links
Images

























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/02—Devices for withdrawing samples
- G01N1/22—Devices for withdrawing samples in the gaseous state
- G01N1/26—Devices for withdrawing samples in the gaseous state with provision for intake from several spaces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M3/00—Investigating fluid-tightness of structures
- G01M3/02—Investigating fluid-tightness of structures by using fluid or vacuum
- G01M3/26—Investigating fluid-tightness of structures by using fluid or vacuum by measuring rate of loss or gain of fluid, e.g. by pressure-responsive devices, by flow detectors
- G01M3/28—Investigating fluid-tightness of structures by using fluid or vacuum by measuring rate of loss or gain of fluid, e.g. by pressure-responsive devices, by flow detectors for pipes, cables or tubes; for pipe joints or seals; for valves ; for welds
- G01M3/2807—Investigating fluid-tightness of structures by using fluid or vacuum by measuring rate of loss or gain of fluid, e.g. by pressure-responsive devices, by flow detectors for pipes, cables or tubes; for pipe joints or seals; for valves ; for welds for pipes
- G01M3/2815—Investigating fluid-tightness of structures by using fluid or vacuum by measuring rate of loss or gain of fluid, e.g. by pressure-responsive devices, by flow detectors for pipes, cables or tubes; for pipe joints or seals; for valves ; for welds for pipes using pressure measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume, or surface-area of porous materials
- G01N15/06—Investigating concentration of particle suspensions
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B17/00—Fire alarms; Alarms responsive to explosion
- G08B17/10—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B17/00—Fire alarms; Alarms responsive to explosion
- G08B17/10—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means
- G08B17/11—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means using an ionisation chamber for detecting smoke or gas
- G08B17/113—Constructional details
Abstract
흡입된 입자 탐지 시스템에서 입자 탐지의 방법이 제공되며, 이 시스템은 샘플링 파이프 네트워크 및 입자 탐지기를 가진다. 샘플링 파이프 네트워크는 입자 탐지기와 유체를 전달하는 적어도 하나의 샘플링 파이프, 샘플 공기가 적어도 하나의 샘플링 파이프를 통해 들어가는 복수의 샘플링 입구, 및 복수의 샘플링 입구의 적어도 하나의 샘플링 파이프 상류에 있는 개구부를 포함하며, 개구부는 샘플링 입구 중 임의의 하나보다 더 낮은 흐름 임피던스를 가진다. 상기 방법은 공기 샘플링 네트워크를 통해 샘플 공기를 입자 탐지기로 끌어당기는 단계; 입자 탐지기로 샘플 공기를 분석하는 단계; 소정의 임계값보다 큰 공기 샘플에서 입자의 농도가 탐지되는 경우에, 샘플링 파이프에 복수의 샘플 공기 패킷을 형성하기 위해, 확대 국면에 들어가는 단계, 각 샘플 공기 패킷은 샘플링 입구에 상응하며 상응하는 샘플링 입구로부터 끌어 당겨진 확대된 농도의 공기를 포함한다; 복수의 샘플 공기 패킷을 포함하는 샘플 공기를 샘플링 파이프를 통해 입자 탐지기로 수송하는 단계; 및 어느 샘플링 입구를 통해 임의의 입자가 입자 탐지 시스템에 들어갔는지를 측정하는 단계를 포함한다.
Description
본 발명은 입자 탐지에 관한 것이다. 예시적 목적만을 위해, 본 발명의 바람직한 실시태양은 연기 탐지 시스템과 관련하여 기술될 것이나, 본 발명은 이런 예시적 용도에 제한되는 것으로 생각하지 않아야 한다.
공기 샘플링 또는 흡입된 연기 탐지 시스템은 샘플링 네트워크를 통해 중앙 고 민감성 입자 탐지기로 공기 샘플을 끌어당김으로써 작동한다. 샘플링 네트워크는 통상적으로 파이프(들)의 길이를 따라 위치한 샘플링 홀 또는 샘플링 포인트 형태의 여러 공기 샘플 입구를 구비한 하나 이상의 샘플 파이프를 포함한다. 이런 구성에서, 단일 탐지기에 공기 샘플 입구가 위치되는 여러 다른 지리학적 위치로부터 발생하는 공기가 공급될 수 있다. 따라서 이런 단일 탐지기는 여러 다른 위치에서 연기의 존재를 동시에 관찰할 수 있다.
상기한 대로 공기 샘플링 시스템이 가진 하나의 인정된 어려움은 어느 공기 입구를 통해 연기가 시스템에 들어가는지를 확인하지 않는다는 것이다. 공기 입구가 알려진 경우, 연기의 출처의 지리학적 위치가 추론될 수 있다. 이것은 사람이 연기 위치로 향하게 하는 것을 포함하는 화재의 발생가능 위치의 조사를 가능하게 하여, 공기 샘플링 시스템은 화재의 추가 확장을 조사 및 가능하게는 개입 및 예방할 수 있거나 화재지역의 장비를 멈추게 할 수 있다. 선택적으로, 적절한 화재 억제 시스템이 국한된 방식으로 배치되어, 시스템에 의해 유발된 손해뿐만 아니라 비용을 제한할 수 있다.
연기가 탐지되는 지리학적 위치를 측정할 수 있는 공기 샘플링 입자 탐지 시스템을 제공하려는 시도들이 있었다. 예를 들어, Jax, 'Method and Device for locating accumulations of pollutants', U.S. 5,708,218 and Hekatron Vertriebs GmbH, 'Verfahren und Vorrichtung zur Erkennung eines Brandes', EP 1811478.
이런 시스템의 각각은 샘플링 파이프를 따라 어디서(즉 어느 샘플 입구를 통해) 탐지된 연기가 시스템에 들어가는지를 추론하기 위한 측정이 일어나는 두 순간 사이의 경과 시간을 측정한다. 그러나, 이런 추론 과정은 대개 신뢰할 수 없다.
작스(Jax) 시스템은 제 1 연기 수준 및 제 2 연기 수준의 탐지 사이의 경과 시간을 측정한다. 제 1, 낮은 수준의 연기 및 제 2, 높은 수준의 연기의 탐지 사이의 시간은 연기에 시스템에 들어간 수집 라인을 따라가는 거리를 나타낸다. 그러나, 이 과정은 부정확할 수 있다. 예를 들어, 이런 방법을 사용하는 시스템은 연기가 처음 탐지된 지점으로부터 시작하는 기간 동안 대략 일정하게 유지되는 제 1 출입 지점에서 제 2 출입 지점으로부터의 기여가 신뢰가능하게 탐지될 수 있을 때까지 탐지된 연기의 실제 수준에 의존한다. 더욱 구체적으로, 증가하는 규모의 화재에 의해 유발된 것과 같은 연기 수준의 증가는 공기가 끌어당겨진 지리학적 위치의 부정확한 판단을 초래할 수 있다.
헤카트론(Hekatron)에서, 제 1 공기-샘플링 탐지 장치는 연기의 존재를 탐지한다. 연기의 탐지에 반응하여, 제 2 공기-샘플링 탐지 장치가 관여하여, 공기 샘플링 장치가 파이프 네트워크를 따라 공기를 끌어당긴다. 제 1 공기-샘플링 탐지 장치에 의한 최초 탐지와 제 2 공기-샘플링 탐지 장치에 의한 탐지 사이의 경과 시간이 측정된다. 이상적으로, 경과 시간은 연기 충전 공기가 끌어당겨진 위치를 나타낸다. 정확성을 확보하기 위해서, 이런 시스템은 작동할 때마다, 매우 일정한 방식으로 작동하는 흡입 시스템을 필요로 한다. 그러나, 이것은 성취하기 어려운데 이는 다양한 특징이 붕괴, 예를 들어, 시간에 따른 흡입 시스템의 분해 작용 및 작업 및 환경 조건, 예를 들어, 공기 밀도의 변화에 영향을 미치거나 시간에 따른 먼지에 의한 샘플링 지점의 협착이 시스템 내의 기류 특성을 변화시키고 경과 시간을 기초로 한 연기 주소의 추론을 잠재적으로 신뢰할 수 없게 할 것이기 때문이다.
일부 구성에서, 기류는 일시적으로 역전되어, 탐지를 위해 공기를 다시 끌어당기기 전에 깨끗한 공기를 샘플링 네트워크에 주입할 수 있다. 이런 구성의 개념은 샘플링 네트워크를 통해 공기를 다시 끌어당기고 연기를 탐지하기 전에 지연을 측정하기 전에 시스템으로부터 모든 연기 입자를 실질적으로 흘려보내는 것이다. 이론적으로, 더 긴 지연은 입자가 탐지기로부터 더 먼 지점에서 샘플링 네트워크에 들어갔다는 것을 나타낸다. 그러나, 이런 구성은 깨끗한 공기가 샘플링 네트워크에 주입되는 단계 동안, 관찰된 환경 내의 연기 입자가 공기 입구 주위의 지역에서 배출될 수 있다는 단점을 가지는데, 이는 깨끗한 공기가 입구로부터 배출되기 때문이다. 공기가 시스템을 통해 연속적으로 끌어 당겨질 때, 연기 입자가 다시 한 번 입구 속으로 끌어 당겨지기 전에 추가 지연이 있을 수 있다.
이런 문제들의 하나 이상을 처리하는 기술의 한 범위는 Xtralis Technologies Ltd의 이름으로 국제 특허 출원 번호 PCT/AU2013/001201에 기술되었다. 출원의 내용은 모든 목적을 위해 참조로 본 발명에 포함된다. 대안적 방법을 제공하는 추가 발전이 진전되었다. 공기 샘플링 네트워크 또는 이의 일부를 테스팅하는 방법이 또한 개시된다.
또한, 흡입된 입자 및/또는 기체 샘플링 시스템의 효율 및 유효성을 유지하고 개선하기 위해서, 샘플링 파이프 네트워크의 무결성을 보장하는 것이 필수적이다.
유리하게는, 본 발명의 실시태양은, 특히 완전히 또는 부분적으로 차단된 샘플링 입구, 파괴된 파이프 등을 테스팅하기 위해, 정확한 작업에 대한 샘플링 파이프 네트워크를 확인하는 개선된 방법을 제공한다.
따라서 본 발명의 목적은 상기 단점들 중 적어도 일부를 해결하는 입자 탐지 시스템을 제공하는 것이다. 본 발명의 다른 목적은 대중에게 공지된 제품보다 유용한 제품을 제공하는 것이다.
명세서에서 임의의 종래기술에 대한 언급은 종래기술이 호주 또는 임의의 다른 관할권에서 일반 상식의 일부를 형성한다는 것의 인정 또는 임의의 형태의 암시가 아니며 이렇게 해석되지 않아야 하며 또는 이런 종래기술이 당업자에게 관련이 있는 것으로 확인, 이해 및 생각되는 것으로 예상되는 것이 합리적일 수 있다는 것의 인정 또는 임의의 형태의 암시가 아니며 이렇게 해석되지 않아야 한다.
본 발명의 제 1 양태에서, 흡입된 입자 탐지 시스템에서 입자 탐지의 방법이 제공되며, 이 시스템은 샘플링 파이프 네트워크 및 입자 탐지기를 가지며, 샘플링 파이프 네트워크는 입자 탐지기와 유체를 전달하는 적어도 하나의 샘플링 파이프, 샘플 공기가 적어도 하나의 샘플링 파이프를 통해 들어가는 복수의 샘플링 입구, 및 복수의 샘플링 입구의 적어도 하나의 샘플링 파이프 상류에 있는 개구부를 포함하며, 개구부는 샘플링 입구 중 임의의 하나보다 더 낮은 흐름 임피던스를 가지며; 상기 방법은 공기 샘플링 네트워크를 통해 샘플 공기를 입자 탐지기로 끌어당기는 단계; 입자 탐지기로 샘플 공기를 분석하는 단계; 소정의 임계값보다 큰 공기 샘플에서 입자의 농도가 탐지되는 경우에, 샘플링 파이프에 복수의 샘플 공기 패킷을 형성하기 위해, 확대 국면에 들어가는 단계, 각 샘플 공기 패킷은 샘플링 입구에 상응하며 상응하는 샘플링 입구로부터 끌어 당겨진 확대된 농도의 공기를 포함한다; 복수의 샘플 공기 패킷을 포함하는 샘플 공기를 샘플링 파이프를 통해 입자 탐지기로 수송하는 단계; 어느 샘플링 입구를 통해 임의의 입자가 입자 탐지 시스템에 들어갔는지를 측정하는 단계를 포함한다.
본 발명의 제 2 양태에서, 적어도 하나의 샘플링 파이프, 샘플 공기가 통과하여 적어도 하나의 샘플링 파이프에 들어가는 복수의 샘플링 입구, 및 복수의 샘플링 입구의 적어도 하나의 샘플링 파이프 상류에 있는 개구부를 포함하며, 개구부는 샘플링 입구 중 임의의 하나보다 더 낮은 흐름 임피던스를 가지는 샘플링 파이프 네트워크; 샘플링 파이프와 유체를 전달하고 공기 샘플링 네트워크를 통해 끌어 당겨진 샘플 공기에서 입자를 분석하도록 만들어진 입자 탐지기; 및 입자 탐지기가 소정의 임계값보다 큰 입자 농도를 탐지하는 경우에, 샘플 파이프에서 복수의 샘플 공기 패킷을 생성하도록 구성된 확대 장치를 포함하는 시스템이 제공되며, 각 샘플 공기 패킷은 샘플링 입구에 상응하며 상응하는 샘플링 입구로부터 끌어 당겨진 확대된 농도의 공기를 포함하며, 시스템은 어느 샘플링 입구를 통해 임의의 입자가 입자 탐지 시스템에 들어갔는지를 측정하도록 구성된다.
본 발명의 제 3 양태에서, 공기 샘플링 네트워크를 테스트하는 방법으로서, 네트워크는 적어도 하나의 공기 샘플링 파이프 및 하나 이상의 샘플링 입구를 포함하며, 상기 방법은 공기를 공기 샘플링 시스템 속으로 불어넣는 단계; 불어넣은 공기가 하나 이상의 샘플링 입구를 통해 빠져나감에 따라 공기 샘플링 네트워크의 적어도 하나의 단편을 통과하는 공기의 흐름 특성을 측정하는 단계; 측정된 흐름 특성의 측정된 값을 소정의 값과 비교하는 단계; 및 측정된 값이 소정의 값과 설정량 만큼 차이가 나는 경우 결함을 표시하는 단계를 포함한다.
또한, 연기 탐지 시스템 속의 연기의 적어도 하나의 출입 지점을 측정하는 방법이 본 발명에 개시되며, 상기 시스템은 적어도 하나의 샘플링 파이프 및 입자 탐지기에 의한 분석을 위해 공기 샘플이 연기 탐지 시스템의 적어도 하나의 샘플링 파이프에 들어갈 수 있는 복수의 샘플링 입구를 포함하는 샘플링 파이프 네트워크를 가진다. 상기 방법은 소정의 사건 이후 연기 탐지 시스템의 적어도 일부를 통해 통과된 샘플 공기의 부피 또는 이 부피에 해당하는 값을 측정하는 단계; 및 측정된 부피 또는 값을 적어도 부분적으로 기초로 하여 복수의 샘플링 입구 중 어느 샘플링 입구를 통해 연기가 연기 탐지 시스템에 들어갔는지를 측정하는 단계를 포함한다.
소정의 사건은, 예를 들어, 연기 탐지 사건; 또는 연기 탐지 시스템에서 공기 샘플 흐름 특성의 변화일 수 있다.
일부 실시태양에서, 상기 방법은 연기 탐지 시스템의 적어도 일부를 통해 통과하는 공기 샘플의 유량을 연속적으로 측정하는 단계를 포함한다. 선택적으로 상기 방법은 소정의 사건의 발생에 시에 샘플 공기의 부피 또는 관련 값의 측정을 실행하는 단계를 포함한다.
연기 탐지 네트워크의 적어도 일부를 통해 통과한 공기 샘플의 부피 또는 관련 값은 시간에 따른 유량 측정을 축적함으로써 측정될 수 있다. 유량 측정은 바람직하게는 체적유량 측정이다. 가장 바람직하게는 유량 측정은 초음파 유량 센서를 사용하여 측정된다.
소정의 사건 이후 연기 탐지 시스템의 적어도 일부를 통해 통과된 샘플 공기의 부피 또는 이 부피에 해당하는 값을 측정하는 단계는 질량; 길이; 압력; 온도, 제 2 부피; 또는 부피-관련 사건의 축적 총합 중 임의의 하나 또는 소정의 사건 이후 연기 탐지 시스템의 적어도 일부를 통해 통과하는 공기 샘플의 부피와 관련된 다른 변수를 측정하는 단계를 포함할 수 있다.
상기 방법은 소정의 사건 이후 연기 탐지 시스템의 적어도 일부를 통해 통과하는 공기 샘플의 전부 또는 일부를 수집하는 단계를 포함할 수 있다.
상기 방법은 제 1 연기 탐지 사건에 반응하여 공기 샘플 흐름 특성을 변화시키는 단계를 더 포함할 수 있다. 예를 들어, 연기 탐지 사건에서 공기 샘플 흐름 특성을 변화시키는 단계는 다음 중 하나 이상을 포함할 수 있다:
· 밸브를 개방하는 단계;
· 밸브를 밀폐하는 단계;
· 연기 탐지 시스템의 적어도 일부에서 공기 샘플 흐름의 방향을 변화시키는 단계;
· 연기 탐지 시스템의 적어도 일부에서 공기 샘플의 유량을 변화시키는 단계;
· 흡입 시스템을 시작하는 단계; 및
· 흡입 시스템을 멈추는 단계.
또한 본 발명에 개시된 대로, 적어도 하나의 샘플링 파이프 및 공기 샘플이 입자 탐지기에 의한 분석을 위해 연기 탐지 시스템의 적어도 하나의 샘플링 파이프에 들어갈 수 있는 복수의 샘플링 입구를 가진 공기 샘플링 네트워크와 유체를 전달하는 입자 탐지기 및 공기 샘플링 네트워크를 통해 탐지기로 공기 샘플을 끌어당기기 위한 흡입기를 가진 형태의 연기 탐지 시스템 속의 연기의 적어도 하나의 출입 지점을 측정하기 위한 장치가 제공된다. 상기 장치는 소정의 사건 이후 연기 탐지 시스템의 적어도 일부를 통해 통과된 샘플 공기의 부피 또는 이 부피에 해당하는 값을 측정하기 위한 수단; 및 탐지된 부피 또는 값을 기초로 샘플링 네트워크 속의 입자의 적어도 하나의 출입 지점을 확인하기 위한 수단을 포함한다.
상기 장치는 바람직하게는 연기가 시스템에 들어가게 되는 하나 이상의 상응하는 샘플링 입구를 참조하여 상기 출입 지점의 하나 이상을 확인한다.
입자 탐지 시스템의 적어도 일부를 통해 통과된 샘플의 부피 또는 이 부피와 관련된 값을 측정하기 위한 수단은 바람직하게는 유량 센서를 포함한다. 가장 바람직하게는 유량 센서는 초음파 유량 센서를 포함한다.
상기 장치는 바람직하게는 본 발명의 제 1 양태에 따른 방법을 실행하도록 구성된다.
본 발명에 개시된 대로, 공기 샘플에서 입자를 탐지하기 위한 입자 탐지 챔버, 적어도 하나의 샘플링 파이프 및 공기 샘플이 입자 탐지기에 의한 분석을 위해 연기 탐지 시스템의 적어도 하나의 샘플링 파이프에 들어갈 수 있는 복수의 샘플링 입구를 가진 공기 샘플링 네트워크로부터 공기 샘플을 수용하기 위한 입구, 및 공기 샘플링 네트워크를 통해 탐지기로 공기 샘플을 끌어당기기 위한 흡입기를 포함하는 연기 탐지기가 제공되며, 탐지기는 소정의 사건 이후 연기 탐지 시스템의 적어도 일부를 통해 통과된 샘플 공기의 부피 또는 이 부피에 해당하는 값을 적어도 부분적으로 기초로 하여 샘플링 네트워크 속의 연기의 적어도 하나의 출입 지점을 확인하도록 구성된 프로세서를 더 포함한다.
연기 탐지기는 연기 탐지기의 적어도 일부를 통해 통과된 샘플 공기의 유량을 탐지하도록 구성된 유량 센서, 예를 들어, 초음파 유량 센서를 포함할 수 있다.
프로세서는 바람직하게는 연기 탐지기가 본 발명의 제 1 양태에 따른 방법을 실행하게 하도록 구성된다.
또한 본 발명에 입자 탐지 시스템 속의 입자의 출입 지점을 측정하는 방법이 개시되며, 상기 입자 탐지 시스템은 입자 탐지기 및 입자 탐지기와 유체를 전달하는 샘플링 네트워크를 포함하며, 샘플링 네트워크는 유체가 끌어당겨지는 복수의 입구를 포함하며, 입자 탐지 시스템은 샘플링 네트워크를 통해 탐지기에 유체를 끌어당기는 수단을 더 포함한다. 상기 방법은 제 1 입자 탐지 프로파일과 제 2 입자 탐지 프로파일을 비교하는 단계; 프로파일이 소정의 등급에 일치하는 입자 탐지 프로파일 사이의 오프셋(offset)을 측정하는 단계; 및 이 오프셋을 기초로 탐지 시스템 속의 입자의 출입 위치를 측정하는 단계를 포함한다.
일부 실시태양에서, 오프셋은 시간 오프셋이다. 다른 실시태양에서, 오프셋은 부피 오프셋이다.
일부 실시태양에서, 비교는 입자 탐지 프로파일 사이의 상호-연관의 계산을 필요로 한다.
일부 실시태양에서, 계산된 상호 연관의 최대값이 측정되며 최대값에 해당하는 입자 탐지 프로파일 사이의 오프셋이 측정된다.
일부 실시태양에서, 계산된 상호 연관 함수가 측정되고 소정의 값과 비교된다.
바람직하게는, 유체는 공기이며, 샘플링 네트워크를 통해 탐지기로 유체를 끌어당기기 위한 수단은 흡입기이다.
한 실시태양은 제 1 및 제 2 입자 탐지 프로파일의 비교인 적어도 제 1 소정의 입자 탐지기 기준이 제 1 입자 탐지 프로파일을 기준으로 충족되는지를 측정하는 단계를 포함한다.
상기 방법은 제 1 및/또는 제 2 입자 탐지 프로파일을 연속적으로 저장하는 단계를 포함할 수 있다. 선택적으로 프로파일들의 하나는 적어도 하나의 소정의 기준이 충족된 후에만 저장될 수 있다.
상기 방법은 제 1 및 제 2 입자 탐지 프로파일의 비교를 시작하기 전에 입자 탐지 시스템의 적어도 일부에서 공기 흐름 특성을 변화시키는 단계를 포함할 수 있다.
한 양태에서 입자 탐지 시스템에서 기류 특성을 변화시키는 단계는 다음 중 하나 이상을 포함할 수 있다:
· 밸브를 개방하는 단계;
· 밸브를 밀폐하는 단계;
· 입자 탐지 시스템의 적어도 일부에서 기류의 방향을 변화시키는 단계;
· 입자 탐지 시스템의 적어도 일부에서 기류의 속도를 변화시키는 단계;
· 흡입 시스템을 시작하는 단계; 및
· 흡입 시스템을 멈추는 단계.
본 발명에 공기가 공기 샘플링 네트워크에 들어갈 수 있는 복수의 입구를 가진 공기 샘플링 네트워크와 유체를 전달하는 입자 탐지기를 가진 형태의 입자 탐지 시스템 속의 입자의 적어도 하나의 출입 지점을 측정하기 위한 장치, 및 공기 샘플링 네트워크를 통해 탐지기로 공기 샘플을 끌어당기기 위한 흡입기가 제공되며, 상기 장치는 입자 탐지 시스템의 적어도 일부를 통해 통과하는 공기의 부피를 측정하기 위한 수단을 포함하며, 상기 장치는 입자 탐지 시스템의 적어도 일부를 통해 통과하는 공기의 부피를 나타내는 신호를 수신하기 위한 수단; 측정된 부피를 기초로 입자를 운반하는 공기가 네트워크에 들어간 샘플링 네트워크에서 위치를 측정하기 위한 수단을 포함한다.
또한 복수의 공기 입구의 하나 이상을 통해 입자 탐지 시스템 속의 입자의 출입 지점을 측정하기 위한 장치가 본 발명에 개시된다. 이 장치는 입자 탐지 시스템의 적어도 일부를 통해 흐르는 공기의 부피를 측정하기 위한 수단 및 측정된 부피를 기초로 입자의 출입 지점을 측정하기 위한 수단을 포함한다.
바람직하게는, 입자 탐지 시스템 속의 입자의 출입 지점을 측정하기 위한 장치는 입자가 들어갈 것 같은 적어도 하나의 입구를 참조하여 입자의 공급원을 확인한다.
더욱 바람직하게는, 탐지 시스템 속의 입자 출입 지점을 측정하기 위한 장치는 입자가 공기 샘플링 네트워크에 들어간 샘플링 네트워크를 따라간 거리를 표시를 제공함으로써 입자의 공급원을 확인한다.
본 발명에 입자가 입자 탐지 시스템에 들어갈 수 있는 복수의 샘플링 지점을 가진 샘플링 파이프 네트워크를 구비한 입자 탐지 시스템 속의 입자의 출입 지점을 측정하는 방법이 개시된다. 이 방법은 입자 탐지 시스템의 적어도 일부를 통해 통과하는 공기의 부피를 측정하는 단계 및 복수의 샘플링 지점의 어느 샘플링 구멍을 통해 입자가 입자 탐지 시스템에 들어갔는지를 측정하는 단계를 포함한다.
상기 방법은 제 1 입자 탐지 사건 및 제 2 입자 탐지 사건을 탐지하는 단계 및 입자 탐지 사건 사이에 입자 탐지 네트워크의 적어도 일부를 통해 통과하는 공기의 부피를 측정하는 단계를 포함할 수 있다.
상기 방법은 입자 탐지 네트워크의 적어도 일부를 통해 통과하는 공기의 부피를 연속적으로 측정하는 단계를 포함할 수 있다. 선택적으로 상기 방법은 소정의 조건의 발생시에 부피 측정을 활성화하는 단계를 포함할 수 있다.
입자 탐지 네트워크의 적어도 일부를 통해 통과하는 공기의 부피는 바람직하게는 시간에 따른 유량 측정을 요약함으로써 측정된다. 바람직하게는 유량 측정은 체적 유량 측정이다. 가장 바람직하게는 유량은 초음파 유량 센서를 사용하여 측정된다.
본 발명에 입자 탐지기, 입자 탐지기와 유체를 전달하는 샘플링 네트워크 및 샘플링 네트워크를 통해 유체를 탐지로 끌어당기는 수단을 포함하는 입자 탐지 시스템이 개시된다. 샘플링 네트워크는 복수의 입구를 포함하며, 입구는 복수의 위치 그룹으로 배열된다. 각 위치 그룹은 복수의 샘플링 파이프의 각각에 연결된 입구의 존재 또는 부존재에 의해 정의된 주소를 가진다. 입자 탐지기는 각각의 샘플링 파이프를 따라 공기를 끌어당기고 연기가 탐지되는 사건에서, 샘플링 파이의 각각에서 입자의 존재 및 부존재 모두를 기초로 입자가 탐지기에 들어간 위치 그룹의 주소를 측정하도록 구성된다.
또한 본 발명에 입자 탐지 시스템 속에 입자의 단일 출입 지점을 측정하는 방법이 개시된다. 입자 탐지 시스템은 적어도 하나의 입자 탐지기, 한 입자 탐지기 또는 상기 입자 탐지기와 유체를 전달하는 샘플링 네트워크 및 샘플링 네트워크 또는 한 탐지기 또는 상기 탐지기를 통해 유체를 끌어당기기 위한 수단을 포함한다. 샘플링 네트워크는 복수의 샘플 전달 통로를 포함하며 이를 따라 샘플이 끌어당겨질 수 있고 여기서 입자의 존재는 탐지기들의 적어도 하나에 의해 독립적으로 탐지될 수 있고, 각 샘플 전달 통로는 적어도 하나의 샘플 입구를 포함한다. 상기 입구의 각각은 입구의 물리적 위치에 의해 정의된 복수의 위치 그룹 중 하나에 추가로 속한다. 입자 탐지 시스템은 입자가 각 샘플 전달 통로로부터의 공기 샘플 상에서 탐지되었는지를 측정하도록 구성된다. 상기 방법은 다음 단계를 포함한다:
입자가 각 샘플 전달 통로 상에서 탐지되었는지 아닌지를 기준으로 독특하게 입자가 탐지 시스템 속에 들어간 입구의 위치 그룹을 측정하는 단계.
한 실시태양에서, 샘플링 네트워크는 샘플 전달 통로에 각각 해당하는 복수의 파이프를 포함하며 입자가 위치 그룹에서 탐지되었다는 것을 측정하는 단계는 입자가 복수의 파이프의 각각을 통해 끌어당겨진 유체에서 탐지되었는지 아닌지를 측정하는 단계를 포함한다.
또한 본 발명에 샘플링 네트워크와 유체를 전달하는 적어도 하나의 입자 탐지기 및 샘플링 네트워크를 통해 유체를 상기 입자 탐지기 또는 한 입자 탐지기로 끌어당기기 위한 흡입 수단을 가진 형태의 입자 탐지 시스템 속의 입자의 출입 지점을 측정하기 위한 장치가 개시되며, 상기 샘플링 네트워크는 입자가 개별적으로 탐지될 수 있는 복수의 샘플 전달 통로를 포함한다. 샘플링 네트워크는 복수의 샘플 입구를 포함하며, 각각의 입구는 복수의 물리적 위치의 하나에서 위치의 일원이 되며; 장치는 입자가 각 샘플 전달 통로 상에서 탐지되었는지 아닌지를 기준으로 입자가 존재하는 위치를 측정하기 위한 수단을 더 포함한다.
또한 본 발명에
적어도 하나의 입자 탐지기; 및
복수의 샘플링 입구를 가진 샘플링 파이프를 포함하는 샘플링 시스템, 샘플링 시스템은 샘플링 파이프를 통해 샘플링 입구 근처 환경으로부터 적어도 하나의 입자 탐지기로 분석될 샘플을 운반하도록 배열된다;
샘플링 시스템에서 공기 샘플이 적어도 하나의 입자 탐지기로 흐르도록 배열된 흐름 유도장치를 가진 입자 탐지 시스템에서 방법이 개시된다;
상기 방법은 다음 단계를 포함한다:
샘플링 시스템으로부터 도착하는 샘플에서 제 1 입자 농도를 측정하는 단계;
샘플링 입구의 서브세트에서 샘플링 변수를 변화시키는 단계;
샘플링 시스템으로부터 도착하는 샘플에서 제 2 입자 농도를 측정하는 단계;
제 1 및 제 2 입자 농도 및 변화된 샘플링 변수를 기초로 샘플링 시스템으로부터 도착하는 샘플에서 입자 농도를 측정하는 단계.
변하는 샘플링 변수는 샘플링 입구의 제 1 서브세트를 통과하는 유량일 것이다. 변화는 밸브를 개방 또는 밀폐하거나 팬 또는 샘플링 입구의 서브세트를 통과하는 흐름을 증가(또는 감소)시키는 다른 흐름 유도기를 사용하여 유발될 수 있다. 이 경우에 샘플링 시스템으로부터 도착한 샘플에서 입자 농도를 측정하는 것을 결정하는데 사용된 변한 샘플링 변수는 샘플링 입구의 제 1 서브세트를 통과하는 유량이 될 수 있다.
일부 실시태양에서 변하는 샘플링 변수는 샘플링 입구의 제 1 서브세트를 통해 끌어당겨진 입자 농도이다. 변화는 샘플링 입구의 제 1 서브세트에 가해진 여과 변수를 조절함으로써, 예를 들어, 샘플링 입구를 통해 들어가는 공기의 흐름 통로에 필터를 끼우거나 제거함으로써 유발될 수 있다. 이 경우에 샘플링 시스템으로부터 도착한 샘플에서 입자 농도를 측정하는 것을 결정하는데 사용된 변한 샘플링 변수는 샘플링 입구의 제 1 서브세트를 통과하는 샘플 농도가 될 수 있다.
일부 실시태양에서 샘플링 입구의 제 1 서브세트는 샘플링 입구의 제 2 서브세트와 동일하다. 샘플링 입구가 복수의 입구를 포함하는 경우 제 1 또는 제 2 서브세트는 단일 입구일 수 있다.
또한 본 발명에 복수의 공기 흡입 통로로부터의 공기 샘플에서 오염원(들)을 탐지하기 위한 방법이 개시되며, 다음을 포함한다:
복수의 다른 흐름 패턴을 형성하기 위해 복수의 공기 흡입 통로의 하나 이상에서 흐름을 증가 또는 부분적으로 감소시킴으로써 여러 통로 사이의 흐름 균형을 변화시키는 단계;
복수의 다른 흐름 패턴의 각각에 대한 결합된 공기 흡입 통로의 오염원 수준을 측정하는 단계; 및
복수의 다른 흐름 패턴의 각각에 대한 공기 흡입 통로에서 공지된 소정의 또는 측정된 값의 유량을 사용함으로써 각각의 공기 흡입 통로의 오염원 수준을 결정하는 단계,
생성된 다른 흐름 패턴의 수 및 실시한 오염원 수준 측정의 수는 각각의 공기 흡입 통로에서 오염원 수준을 결정하는데 충분하다.
흐름 균형을 변화시키는 것은 공기 흡입 통로의 각각에서 차례로 부분 흐름 감소에 의해 복수의 다른 흐름 패턴에 대해 얻어지는 것이 바람직하다. 다시 말하면, 4개의 공기 흡입 통로가 있는 경우, 공기 흡입 통로의 제 1 서브세트(예를 들어, 3개 통로)가 부분적으로 밀폐되면서 남아있는 흡입 통로(들)는 개방된 상태로 오염원 수준이 측정된다. 다음으로, 제 1 서브세트 공기 흡입 통로가 다시 개방되고 공기 흡입 통로의 제 2 다른 서브세트가 부분적으로 밀폐되면서 남아있는 공기 흡입 통로(들)는 개방된 상태가 되고 오염원 수준의 제 2 측정이 이루어진다. 이것은 4개의 다른 흐름 패턴이 만들어져서 오염원 수준의 4회 측정이 실시될 때까지 지속된다.
흐름의 부분 감소는 바람직하게는 공기 흡입 통로에서 밸브를 부분적으로 밀폐함으로써 성취된다. 따라서, 각 밸브는 차례로 부분적으로 밀폐되면서 다른 밸브는 개방된 상태가 된다. 이런 배열에서, 각 공기 흡입 통로를 통과하는 유량은 알려져 있지 않을 수 있다. 따라서, 복수의 다른 흐름 패턴의 각각을 위해, 각각의 공기 흡입 통로에서 유량을 측정하는 것이 필요할 수 있다.
다른 형태에서, 흐름 균형을 변화시키는 단계는 공기 흡입 통로 내의 이동가능한 방지재를 구비함으로써 성취될 수 있다. 예를 들어, 이동가능한 방지재는 여러 선택가능한 위치로 이동가능한 회전형 디스크 형태일 수 있다. 디스크는 선택된 위치에 따라 소정의 유량을 형성하는 개구부를 가진다. 따라서, 이런 배열에서, 유량 측정은 필요로 하지 않을 수 있다.
흐름 균형을 변화시키는 세 번째 다른 방법에서, 각각의 공기 흡입 통로는 차례로 배출될 수 있으면서 다른 파이프는 배출되지 않는 상태가 된다. 상기한 다른 두 방법과 비교하여, 이것은 차례로 각각의 배출된 공기 흡입 통로를 통과하는 기류의 증가를 초래할 것이며 또한 다른 공기 흡입 통로에서 유량에 영향을 미칠 수 있다.
바람직한 형태에서, 공기 흡입 통로가 존재하는 것만큼 형성된 많은 흐름 패턴이 존재한다. 흐름 패턴이 존재하는 것만큼 많은 오염원 수준의 측정이 존재한다는 것을 고려하면, 이것은 오염원 수준의 측정 수는 또한 흐름 통로의 수와 동일하다는 것을 의미한다. 각각의 공기 흡입 통로에서 유량이 알려져 있고/각각의 흐름 패턴에 대해 미리 결정되거나 측정되는 것을 조건으로, 이것은 각각의 공기 흡입 통로에서 오염원 수준을 결정하는데 충분한 정보를 제공할 것이다.
일부 배열에서, 유량은 각각의 공기 흡입 통로에서 측정된다. 이것은 바람직하게는 상당히 높은 정확도를 가진 유량 센서에 의해 성취된다. 가장 바람직한 형태에서, 유량은 각각의 공기 흡입 통로에 있는 초음파 유량 센서에 의해 측정된다.
바람직하게는, 각각의 흐름 패턴에 대한 측정된 오염원 수준 및 각각의 흐름 패턴에 대한 각각의 통로에서 알려진/미리 결정된 또는 측정된 유량에 의해, 일련의 방정식은 다음과 같이 풀이될 수 있다:

여기서
X1...Xn = 공기 흡입 통로 1 내지 n에서 농도
C1...Cn = 결합된 공기 흡입 통로의 측정된 오염원 수준
F11...Fn1 = 흐름 패턴 1 내지 n에 대한 파이프 1에서 유량
F12...Fn2 = 흐름 패턴 1 내지 n에 대한 파이프 2에서 유량
F1n...Fnn = 흐름 패턴 1 내지 n에 대한 파이프 n에서 유량
바람직한 형태에서, 공기 흡입 통로는 공기 샘플링 파이프 형태일 수 있다. 각각의 공기 샘플링 파이프는 탐지기 장치상의 개별 흡입 포트 속에 공급될 수 있다. 흐름은 탐지기에 공급되기 전 탐지에서 매니폴드에서 병합될 수 있다.
오염원 수준 또는 유량을 측정하는 단계는 여러 번의 읽기를 필요로 하며 이로부터 평균이 구해진다. 선택적으로, 임의의 다른 통계학적 계산이 이루어져서 여러 번의 읽기의 중심 경향을 결정할 수 있다.
또한 본 발명에 복수의 공기 흡입 통로로부터의 공기 샘플에서 오염원을 탐지하기 위한 감지 시스템이 개시되며, 다음:
복수의 다른 흐름 패턴을 형성하기 위해 공기 흡입 토로의 하나 이상에서 흐름을 증가 또는 부분적으로 감소시키는 공기 흡입 통로의 각각에 흐름 제어 수단을 제어하기 위한 제어 시스템;
결합된 공기 흡입 통로의 오염원 수준을 측정하는 탐지기를 포함하며, 제어 시스템은 복수의 다른 흐름 패턴의 각각에 대한 오염원 수준을 측정하기 위해 탐지기를 제어하고;
제어 시스템은 복수의 다른 흐름 패턴의 각각에 대한 각각의 공기 흡입 통로에서 유량의 알려진, 미리 결정된 또는 측정된 값을 사용하여 각각의 공기 흡입 통로의 오염원 수준을 결정하도록 추가로 작동되며;
제어 시스템은 충분한 수의 다른 흐름 패턴을 형성하고 탐지기가 각각의 공기 흡입 통로의 오염원 수준을 측정하기 위한 충분한 수의 측정을 실행하도록 제어하게 작동된다.
감지 시스템은 공기 흡입 통로의 수에 해당하는 공기 흡입 포트를 포함하는 감지장치 형태일 수 있다. 각각의 공기 흡입 포트는 개별 샘플링 파이프에 결합될 수 있다. 흐름 제어 수단의 각각은 감지 장치 내에 배치될 수 있거나 선택적으로 개별 샘플링 파이프에 배치될 수 있다.
바람직하게는, 제어 시스템은 유량의 측정을 제어할 수 있다.
또한 본 발명에 주변 벽에 의해 형성된 적어도 하나의 신장된 샘플링 덕트를 가지며 덕트의 길이를 따라 위치되고 벽을 통해 연장되어 샘플의 진입을 허용하는 복수의 샘플링 입구를 가진 형태의 환경 샘플링 시스템을 위한 샘플링 지점이 개시되며, 상기 환경 샘플링 시스템은 샘플링 입구를 통해 환경으로부터의 샘플을 덕트 속으로 끌어당기고 덕트를 통해 샘플을 분석 장치로 전달하도록 구성되며, 샘플링 지점은 주변 벽의 안쪽 덕트의 내부 속으로 연장되는 샘플 주입 입구를 포함한다.
샘플 주입 입구는 덕트의 주변 벽을 통해 연장되는 파이프를 포함할 수 있다. 가장 바람직하게는 파이프는 덕트의 주변 벽으로부터 떨어져, 덕트의 중앙에 또는 근처에 출구를 가진다.
샘플 주입 입구는 덕트에서 흐름의 하류 방향으로 마주보는 출구를 가질 수 있다. 한 바람직한 형태에서 샘플 주입 입구는 환경으로부터 샘플을 끌어당기기 위한 제 1 입구 말단 및 덕트 내에 위치한 제 2 출구 말단을 가진 L-형태 파이프이며, 덕트에서 흐름의 하류 방향으로 마주보는 출구를 가진다. 또한 본 발명에 주변 벽에 의해 형성된 적어도 하나의 신장된 샘플링 덕트를 가지며 덕트의 길이를 따라 위치되고 벽을 통해 연장되어 샘플의 진입을 허용하는 복수의 샘플링 입구를 가진 형태의 환경 샘플링 시스템에서 한 방법이 개시되며, 상기 환경 샘플링 시스템은 샘플링 입구를 통해 환경으로부터의 샘플을 덕트 속으로 끌어당기고 덕트를 통해 샘플을 분석 장치로 전달하도록 구성되며, 상기 방법은
샘플 일부가 덕트 아래로 이동함에 따라, 덕트를 따라, 구별된 샘플 부분의 적어도 전선의 확산을 개선하는 구조를 제공하는 단계를 포함한다.
구조는 상기한 대로 덕트의 내부 속으로 연장된 샘플 주입 입구를 포함하는 샘플링 지점일 수 있다. 구조는 또한 사용시에 덕트 내에 층류를 막도록 구성된 덕트 내의 난류를 형성하는 구조일 수 있다. 예를 들어, 구조는 덕트의 윤곽을 갖거나 결을 나타내는 벽; 난류기; 수동 또는 능동 회전 요소 등일 수 있다.
또한 본 발명에 환경 분석 시스템을 위한 샘플링 시스템이 개시되며, 상기 샘플 시스템은 주변 벽에 의해 형성된 적어도 하나의 신장된 샘플링 덕트를 포함하며 덕트의 길이를 따라 위치되고 벽을 통해 연장되어 샘플의 덕트 속으로 진입을 허용하는 복수의 샘플링 입구를 가지며, 상기 환경 샘플링 시스템은 샘플링 입구를 통해 환경으로부터의 샘플을 덕트 속으로 끌어당기고 덕트를 통해 샘플을 분석 장치로 전달하도록 구성되며, 샘플링 시스템은 샘플 일부가 덕트 아래로 이동함에 따라, 덕트를 따라, 구별된 샘플 부분의 적어도 전선의 확산을 개선하는 수단을 더 포함한다. 구조는 상기한 대로 덕트의 내부 속으로 연장된 샘플 주입 입구를 포함하는 샘플링 지점일 수 있다. 구조는 또한 사용시에 덕트 내에 층류를 막도록 구성된 덕트 내의 난류를 형성하는 구조일 수 있다. 예를 들어, 구조는 덕트의 윤곽을 갖거나 결을 나타내는 벽; 난류기; 수동 또는 능동 회전 요소 등일 수 있다.
구조는 덕트의 전체 길이를 따라 실질적으로 연장될 수 있거나, 예를 들어, 샘플링 입구의 하나 또는 전부에 또는 근처에 국소화될 수 있다.
또한 본 발명에 환경으로부터 샘플의 진입을 허용하도록 덕트의 길이를 따라 일렬로 위치한 복수의 샘플링 입구를 가진 적어도 하나의 신장된 샘플링 덕트를 가진 형태의 환경 샘플링 시스템에서 방법이 개시되며, 상기 환경 샘플링 시스템은 샘플링 입구를 통해 환경으로부터의 샘플을 덕트 속으로 끌어당기고 덕트를 통해 샘플을 분석 장치로 전달하도록 구성되며, 상기 방법은 특정 샘플링 입구 근처의 분위기에서 샘플 농도에 대한 국소 샘플 농도를 증가시키도록 적어도 하나의 특정 샘플링 입구에 또는 근처에서 국소 샘플 농도를 변화시키도록 덕트에서 기류 특성을 변화시키는 단계를 포함한다.
기류 특성을 변화시키는 단계는 덕트에서 흐름의 방향을 멈추거나 역전시키는 단계를 포함할 수 있고 특정 샘플링 입구에 인접한 샘플의 일부가 샘플 입구로부터 배출되게 한다. 상기 방법은 특정 샘플 입구를 통해 환경으로부터 추가 샘플을 끌어당기는 단계를 포함한다. 특정 샘플링 입구에 인접한 샘플의 일부가 샘플 입구로부터 배출되게 하도록 덕트에서 흐름의 방향을 멈추거나 역전시키는 단계 및 특정 샘플 입구를 통해 환경으로부터 추가 샘플을 끌어당기는 단계는 1회 이상 반복될 수 있다.
상기 방법은 덕트에서 흐름의 방향을 진동시키는 단계를 포함할 수 있어서 배출 및 환경의 재샘플링의 반복 과정이 일어난다.
상기 방법은 덕트의 내용물을 분석 장치에 수송하는 단계를 포함할 수 있다. 이 수송은 바람직하게는 덕트 내의 샘플의 최소 희석 또는 덕트의 샘플의 세로로 위치한 부분 사이의 혼합에 의해 실행된다. 예를 들어, 상기 방법은 다음의 하나 이상을 포함할 수 있다:
수송 이전 샘플링 입구의 하나 이상을 밀폐하는 단계,
낮은 흐름 임피던스를 제공하도록 상류 위치의 덕트를 개방하는 단계,
상류 위치로부터 덕트를 따라 샘플을 내보내는 단계.
상기 형태의 환경 샘플링 시스템은 환경으로부터 샘플의 진입을 허용하도록 덕트의 길이를 따라 일렬로 위치한 복수의 샘플링 입구를 가진 적어도 하나의 신장된 샘플링 덕트를 가지며, 상기 환경 샘플링 시스템은 샘플링 입구를 통해 환경으로부터의 샘플을 덕트 속으로 끌어당기고 덕트를 통해 샘플을 분석 장치로 전달하도록 구성되며, 상기 시스템은 덕트에서 기류에 의한 샘플의 희석을 개선하는 샘플 확대 장치를 더 포함한다.
샘플 확대 장치는 덕트의 적어도 일부에 흐름 방향을 역전시키는 장치를 포함할 수 있다. 흐름 방향을 역전시키는 장치는 바람직하게는 흐름 방향의 여러 역전이 샘플링 입구에 또는 인접한 공기 샘플의 혼합을 촉진하도록 배열된다. 흐름을 역전시키는 장치는, 예를 들어, 역전가능한 팬, 벨로우, 왕복가능한 피스톤, 진동하는 막 등일 수 있다.
또한 본 발명에 상기 방법을 실행하도록 구성된 환경으로부터 샘플의 진입을 허용하도록 덕트의 길이를 따라 일렬로 위치한 복수의 샘플링 입구를 가진 적어도 하나의 신장된 샘플링 덕트를 가진 형태의 환경 샘플링 시스템이다. 환경 샘플링 시스템은 다음 중 하나 이상을 포함할 수 있다:
덕트를 따라 및/또는 샘플링 입구의 하나 이상을 통해 흐름을 제어하는 하나 이상의 밸브;
덕트를 따라 및/또는 샘플링 입구의 하나 이상을 통해 흐름을 제어하는 팬, 송풍기 또는 다른 흐름 유도 수단.
복수의 위치로부터 분석을 위해 공기 샘플을 전달하기 위한 상기 형태의 환경 샘플링 시스템을 포함하는 입자 탐지 시스템, 및 바람직하게는 연기 탐지 시스템이 제공된다.
한 바람직한 형태에서 입자 탐지 시스템은 본 발명의 다음 양태에 따른 탐지 시스템을 포함한다. 이 경우에, 보조장치는 샘플링 입구 또는 샘플링 지점; 밸브; 필터; 덕트 또는 덕트의 일부; 팬, 피스톤, 벨로우, 펌프, 진동막 등과 같은 흐름 유도 장치; 및 위치측정 모듈의 임의의 하나 이상을 포함할 수 있다.
본 발명의 다른 양태에 따라 공기 부피에서 비정상 상태를 탐지하기 위해, 본 발명에 기술된 형태 중 임의의 것의 입자 탐지 시스템과 같은 탐지 시스템이 제공되며, 탐지 시스템은 공기 부피의 비정상 상태를 탐지하기 위한 탐지기 및 보조장치를 포함하며, 탐지기 및 보조장치는 기류 통로에 의해 서로 및 공기 부피와 유체를 전달하며,
탐지기는 기류 통로를 통해 보조장치와 적어도 한 방향으로 통신하도록 작동된다.
탐지기는 채취된 공기 부피 내의 입자의 비정상적 수준을 탐지하는데 사용된 입자 탐지기 형태일 수 있다. 바람직하게는, 입자 탐지기의 형태는 흡입 연기 탐지기이며, 즉 팬 또는 다른 형태의 유체 드라이브를 포함한다. 따라서, 이런 바람직한 실시태양에서, 탐지기는 기류 통로에서 기류 특성을 변화시킴으로써 기류 통로를 통해 보조장치에 신호를 보낼 수 있다. 이런 바람직한 실시태양에서, 이는 유속 또는 방향을 조절함으로써 성취될 수 있다. 적절하게는, 기류 특성의 변화는 보조장치에 의해 탐지될 수 있으며, 보조장치는 탐지된 변화에 반응한다. 따라서 기류 특성의 변화는 탐지기로부터 보조장치로의 신호로서 작용한다.
바람직하게는 기류 통로는 본 발명의 양태 또는 본 발명에 기술된 실시태양 중 임의의 하나에 기술된 대로 공기 샘플링 시스템 또는 환경 샘플링 시스템을 포함한다.
보조장치는 공기 부피의 비정상적 상태를 탐지하기 위한 탐지기를 포함할 수 있다. 보조 탐지기는 다음 형태의 하나일 수 있다: 입자 탐지기, 기체 탐지기, 온도/열 탐지기, 습도 탐지기. 선택적으로, 보조장치는 필터를 포함할 수 있다. 예를 들어, 필터는 입자 탐지 전에 사용된 사전-필터일 수 있다. 보조장치는 기류 통로 속에 포함된 밸브 또는 팬 형태일 수 있다.
기류 통로는 적절하게는 파이프 및 입구 포트를 포함하는 샘플링 파이프 네트워크를 포함한다. 입자 탐지기를 사용하는 실시태양에서, 기류 통로는 흡입기, 즉 팬을 포함하는 탐지기를 통과하는 흐름 통로 및 탐지 챔버를 포함할 수 있다. 탐지기로부터의 배기 가스는 기류 통로의 일부를 형성한다. 보조장치를 통과하는 흐름 통로는 또한 기류 통로의 일부인 것으로 이해된다.
탐지기 및 보조장치는 기류 통로를 따라 개별 유닛으로 존재할 수 있다. 보조장치는 샘플링 파이프 네트워크에 의해 연기 탐지기 유닛을 이미 구비한 연기 탐지 시스템과 같은 현존하는 탐지 시스템 속에 재개장될 수 있다.
바람직하게는 탐지기는 작동 정보를 보조장치에 전달한다. 예를 들어, 탐지기는 탐지기의 현재 작동 모드와 같은 이의 작동에 대한 정보를 제공할 수 있다. 감지된 정보에 대한 보조장치의 반응은 이의 세팅을 조절하거나 교정 또는 재교정을 실행하거나 이의 작동 상태를 변화시키는 것이다.
상기한 대로, 기류 통로를 통해 통신하는 한 모드는 탐지기가 기류 특성에 변화를 일으키는 것이며 이는 보조장치에 의해 탐지될 수 있다. 기류 특성에 변화는 보조장치에 의해 탐지될 수 있는 기류에 임의의 이상을 포함할 수 있다. 이것은 공기 유량 또는 방향에 변화; 또는 압력 급변 또는 기류 통로에 파도를 포함할 수 있다. 흡입기는 바람직하게는 탐지기 내에 프로그램 가능한 컨트롤러에 의해 제어된다. 따라서, 적절한 프로그래밍은 탐지기가 필요한 신호(들)를 보내게 할 것이다.
기류 통로의 흐름 특성에 변화는 변할 수 있어서 다른 신호는 보조장치에 대해 다른 것을 의미한다. 예를 들어, 유량의 단일 변화 이외의, 증가된 흐름의 펄스, 특정 정보에 해당하는 펄스의 수와 같은 복수의 변화일 수 있다. 선택적으로, 유량 또는 실제 측정 흐름의 변화 정도는 다른 정보를 표시하는데 사용될 수 있다.
바람직하게는, 보조장치는 흐름 특성에 변화를 탐지하기 위한 하나 이상의 센서를 포함하는 감지 시스템을 가진다.
본 발명의 다른 바람직한 실시태양에서, 보조장치는 샘플링 파이프에서 샘플링 입구 형태를 가진다. 가장 바람직하게는, 샘플링 입구는 이전 실시태양에서 기술한 대로, 탐지기와 통신되는 기류 통로에, 밸브와 같은 장치를 포함한다. 바람직하게는 샘플링 입구는 결함을 표시하는 시각적 및/또는 청각적 신호표시 장치를 포함하는 전기 회로를 포함한다. 추가로 또는 선택적으로 표시기는 탐지 시스템의 경고 또는 임의의 다른 상태를 표시할 수 있다.
본 발명의 이런 실시태양의 변형에서, 탐지기는 시각적 및/또는 청각적 신호표시 장치를 활성화시키도록 샘플링 입구와 통신한다. 예를 들어, 탐지기가 샘플 공기 부피 내에서 비정상적 수준의 입자를 탐지하고 그 후 탐지 시스템 속으로 입자의 출입 지점인 샘플링 입구를 확인하는 경우, 탐지기는 기류 통로를 통해 확인된 샘플링 입구와 통신할 수 있고 샘플링 입구에 시각적 및/또는 청각적 신호를 일으킬 수 있다.
선택적으로, 샘플링 입구는 압력 또는 흐름 센서를 포함하여 흐름/압력 특성에 변화는 센서에 의해 감지되며 센서는 시각적 및/또는 청각적 신호를 활성화시킨다.
각 샘플링 입구는 자신의 신호표시 주소를 가질 수 있어서 탐지기는 공통 샘플링 파이프 상에 여러 샘플링 입구가 존재하는 경우에도 특정 샘플링 입구와 통신할 수 있다.
상기한 실시태양에서 기류 통로를 통한 통신은 보조장치에 의해 탐지가능한 소리 전송에 의할 수 있다. 예를 들어 팬 소음에 변화는 신호전달 목적에 사용될 수 있다. 다른 경우, 소리 신호, 예를 들어, 음향, 초음파 또는 초저주파음파는 탐지기 또는 시스템의 다른 구성요소에 의해 생성될 수 있고 보조장치에 의해 감지될 수 있다. 적절하게는, 보조장치는 감지 시스템의 일부로서 소음을 탐지하는 마이크 또는 다른 변환기를 가진다.
본 발명의 다른 형태에서, 진동은 탐지기에 의해 생성될 수 있는데, 예를 들어, 보조장치에 제공된 적절한 진동 센서에 의한 파이프의 두드림에 의해 생성될 수 있다.
비록 이런 시스템은 기류 통로를 통해 한 줄의 시계를 필요로 할 수 있지만, 탐지기는 보조장치상의 광센서에 의해 광신호를 교대로 전송할 수 있다.
선택적으로, 탐지기는 보조장치와 무선으로, 예를 들어, 와이-파이, 지그비, 블루투스 또는 임의의 다른 무선 프로토콜을 사용하여 통신할 수 있다.
본 발명의 다른 양태에 따라 탐지 시스템을 위한 보조장치가 제공되며, 탐지 시스템은 공기 부피에서 비정상 상태를 탐지하기 위한 것이며, 보조장치는 기류 통로에 의해 탐지 시스템 및 공기 부피와 유체를 전달하게 연결되며, 보조장치는 기류 통로를 통해 탐지 시스템에 의해 전송된 통신을 수신하도록 작동된다. 보조장치는 본 발명의 제 1 양태에 따라 위에서 논의한 특징 중 임의의 것을 포함할 수 있다.
본 발명의 다른 양태에 따라 공기 부피에서 비정상 상태를 탐지하기 위한 탐지 시스템이 제공되며, 탐지기 및 보조장치는 서로에게 및 공기 부피에 유체를 전달하며, 탐지기는 유체 전달의 기류 특성에 변화를 가함으로써 보조장치와 적어도 한 방향으로 통신하도록 작동되며, 상기 변화는 보조장치에 의해 탐지가능하다.
본 발명의 다른 양태에 따라 탐지 시스템을 위한 보조장치가 제공되며, 탐지 시스템은 공기 부피에서 비정상 상태를 감지하기 위한 것이며, 보조장치는 탐지 시스템 및 공기 부피와 유체를 전달하게 연결되며, 보조장치는 탐지 시스템에 의해 생성된 기류 특성에 변화를 탐지하도록 작동된다. 바람직하게는, 보조장치는 상기 변화에 반응하여 작동가능하다. 그러나, 보조장치는 어떠한 변화가 없음에도 반응하여 작동가능할 수 있다.
상기 두 양태에서 탐지 시스템 및 보조장치는 위에서 논의된 바람직한 특징의 임의의 것을 포함할 수 있다.
본 발명의 다른 양태에 따라, 공기 부피에서 비정상 상태를 탐지하는 탐지 시스템을 작동하는 방법이 제공되며, 탐지 시스템은 공기 부피의 비정상 상태를 탐지하기 위한 탐지기 및 보조장치를 포함하며, 탐지기 및 보조장치는 기류 통로에 의해 서로에게 및 공기 부피에 유체를 전달하며, 상기 방법은 기류 통로를 통해 탐지기로부터 보조장치로 신호를 전달하는 단계를 포함하며, 보조장치는 신호 또는 신호 없음에 반응한다.
탐지기는 기류 특성에 변화를 가함으로써 기류 통로를 통해 보조장치에 신호를 전달할 수 있다. 선택적으로, 신호는 본 발명의 상기 양태와 관련하여 위에서 논의한 다른 방법 중 임의의 것에 따라 보내질 수 있다.
신호 또는 신호 없음에 대한 보조장치 반응은 닫히고, 결함 모드에 들어가거나 작동 특성을 조절하는 것일 수 있다.
본 발명의 다른 양태에 따라 공기 부피에서 비정상 상태를 탐지하는 탐지 시스템을 작동하는 방법이 제공되며, 탐지 시스템은 공기 부피의 비정상 상태를 탐지하기 위한 탐지기 및 보조장치를 포함하며, 탐지기 및 보조장치는 기류 통로에 의해 서로에게 및 공기 부피에 유체를 전달하며, 상기 방법은 보조장치에서, 기류 통로를 통해 신호를 수신하는 단계; 수신된 신호를 기초로 보조장치를 제어하는 단계를 포함한다.
신호를 수신하는 단계는 보조장치에서 기류 통로의 일부에서 유량, 방향 또는 압력 등과 같은 흐름 변수에 변화를 탐지하는 단계를 포함할 수 있다.
보조장치를 제어하는 단계는 수신된 신호에 반응하여 보조장치의 적어도 하나의 작동 변수 또는 상태를 변화시키는 단계를 포함할 수 있다. 바람직하게는 작동 변수의 변화는 기류 통로에서 흐름 상태를 변화시킨다.
본 발명의 다른 양태에 따라 공기 부피에서 비정상 상태를 탐지하는 탐지 시스템을 작동하는 방법이 제공되며, 탐지 시스템은 공기 부피의 비정상 상태를 탐지하기 위한 탐지기 및 보조장치를 포함하며, 탐지기 및 보조장치는 기류 통로에 의해 서로에게 및 공기 부피에 유체를 전달하며, 상기 방법은 기류 통로에서 기류에 변화를 보조장치에서 감지하는 단계; 감지된 변화를 기초로 보조장치를 제어하는 단계를 포함한다.
신호를 수신하는 단계는 보조장치에서 기류 통로의 일부에서 유량, 방향 또는 압력 등과 같은 흐름 변수에 변화를 탐지하는 단계를 포함할 수 있다.
보조장치를 제어하는 단계는 수신된 신호에 반응하여 보조장치의 적어도 하나의 작동 변수 또는 상태를 변화시키는 단계를 포함할 수 있다. 바람직하게는 작동 변수의 변화는 기류 통로에서 흐름 상태를 변화시킨다.
상기 논의는 탐지기와 보조장치 사이의 한 방향 통신에 집중하였지만, 양방향 통신이 또한 가능하다. 보조장치로부터 탐지기로의 통신은 보조장치에서 밸브의 존재에 의해 생성될 수 있으며 기류 특성에 대한 필연적인 효과는 탐지기에서 흐름 센서에 의해 탐지된다. 일부 보조장치는 또한 팬을 포함한다. 이 팬은 또한 탐지기에 의해 감지될 수 있는 기류 특성에 영향을 미치는데 사용될 수 있다.
상기 실시태양에서 보조장치는 밸브, 팬, 흐름 제어 장치, 탐지기, 필터, 샘플링 입구 중 임의의 하나 이상을 포함할 수 있다.
본 발명의 양태는 흡입된 입자 및/또는 기체 샘플링 시스템에서 샘플링 파이프의 정확한 성능을 측정하는 방법을 제공한다.
한 양태에서 상기 방법은 샘플링 파이프 내의 적어도 하나의 기류 특성에 변화를 유도하는 샘플링 파이프에 기류에 변화를 일으키는 단계, 및 상기 기류 특성에서 변화의 효과를 탐지하는 단계를 포함한다. 기류 특성에 변화 또는 이의 효과는 기류에 변화가 유지되는 한 일시적이거나 지속적일 수 있다.
샘플링 파이프는 바람직하게는 샘플링 입구와 탐지기 사이에서 연장된다.
한 바람직한 실시태양에서, 각 샘플링 입구는 작동될 때 샘플링 파이프에서 기류 특성에 변화를 일으키는 장치를 포함한다.
흐름 또는 압력 센스에 의한 흐름 또는 압력에 변화의 탐지는 샘플 입구와 연기 또는 기체 탐지기 사이에 샘플링 파이프의 무결성을 입증시킨다.
상기 방법은 바람직하게는 샘플링 파이프에서 흐름 방향을 변화시키는 단계를 포함하며, 이는 바람직하게는 샘플링 입구와 결합된 샘플링 파이프에서 밸브가 상태를 변화시키게 한다. 상기 방법은 밸브의 변화된 상태에 의해 유발된 유속 또는 압력에 변화를 탐지하는 단계를 포함할 수 있다. 유리하게는 장치는 샘플링 파이프에서 공기의 흐름을 역전시킴으로써, 즉, 공기를 샘플링 파이프 속으로 불어넣음으로써 작동된다.
일부 실시태양에서, 상기 방법은 샘플링 파이프에서 기류에 변화를 일으키기 전에 압력 또는 흐름을 측정하는 단계 및 측정 압력 또는 흐름이 소정의 변수 내에 있는 경우 기류에 상기 변화를 일으키는 단계를 포함할 수 있다.
상기 방법은 샘플링 파이프에서 누설에 대해 테스트하기 위해 고정된 양압에서 샘플링 파이프에 공기를 유지하는 단계를 더 포함할 수 있다.
상기 방법은 기류 특성에 변화의 패턴을 일으키도록 샘플링 파이프에서 흐름 또는 압력에 변화의 패턴을 일으키는 단계를 더 포함할 수 있다.
한 실시태양에서, 각 샘플링 입구에서 장치는 공기압으로 작동된다.
샘플링 파이프는 각 샘플링 입구를 탐지기와 직접 연결할 수 있다. 한 실시태양에서, 개개의 샘플링 입구를 가진 복수의 샘플링 파이프가 탐지기에 연결된다. 탐지기는 개개의 샘플링 파이프와 선택적으로 유동적으로 변하도록 구성될 수 있다. 이 실시태양에서, 샘플링 파이프에서 기류 특성에 변화의 효과를 탐지하는 센서는 탐지기에 또는 근처에 위치될 수 있다.
다른 실시태양에서 샘플링 파이프는 하나 이상의 제 2 샘플링 파이프를 포함할 수 있고 샘플링 입구가 제 2 샘플링 파이프의 각각에 제공된다. 이 경우에 각 제 2 샘플링 파이프는 각 제 2 샘플링 파이프의 성능의 독립적 확인을 가능하게 하는 센서를 가지는 것이 바람직하다.
본 발명은 또한 흡입된 입자 및/또는 기체 샘플링 시스템을 위한 샘플링 입구를 제공하며, 샘플링 입구는 기류를 관찰 지역으로부터 흡입 샘플링 시스템의 샘플링 파이프로 향하게 하도록 구성되며, 샘플링 입구는 샘플링 파이프에서 흐름 특성에 변화를 일으키도록 작동 가능하게 된다.
바람직하게는 샘플링 입구는 공기가 샘플링 입구 속으로 샘플링 파이프 쪽으로 끌어 당겨질 때 작동하는 개방 위치 및 샘플링 입구를 통과하는 기류는 변화된 특성을 가지는 작동된 위치 사이에서 작동가능한 밸브와 같은 흐름 변형 장치를 포함한다. 가장 바람직하게는 흐름 변화 장치는 샘플링 입구에서 기류를 변화시킴으로써 작동된 위치 속으로 이동된다. 바람직하게는 샘플링 입구에서 기류를 변화시키는 것은 샘플링 입구에서 흐름 방향을 역전시킴으로써 성취된다. 밸브가 작동된 위치로 이동될 때 밸브는 샘플링 입구에서 압력 증가 및/또는 흐름 감소를 일으킬 수 있다. 작동된 위치는 기류가 샘플링 입구를 통해 흐를 수 있는 제 2 개방 위치일 수 있다. 바람직하게는 개방 위치는 샘플링 입구를 통과하는 제 1 흐름 통로를 형성하며 작동된 위치는 샘플링 입구를 통과하는 다른 흐름 통로를 형성한다. 이런 위치들 사이에서 이동할 때, 흐름 통로는 봉쇄될 수 있어서, 공기 샘플링 시스템을 통과하는 흐름을 예방 또는 적어도 크게 감소시킨다.
샘플링 입구는 여러 작동된 위치, 예를 들어, 밀폐된 작동 위치 및 개방된 작동 위치를 포함할 수 있다.
바람직하게는 샘플링 입구는 개방 위치 쪽으로 편향된다. 작동된 위치 또는 각각의 작동된 위치로의 이동은 공기 샘플링 파이프에서 흐름의 변화에 의해 일어날 수 있다.
일부 실시태양에서, 공기 샘플링 시스템을 작동시키는 방법이 기술된다. 이 방법은 공기가 관찰되는 영역으로부터 공기 샘플링 시스템 속으로 끌어당겨지고 공기 샘플링 시스템의 하나 이상의 샘플링 입구가 제 1 상태인 제 1 모드로 작동하는 단계를 포함한다. 상기 방법은 또한 공기 샘플링 시스템에서 충분한 압력을 일으키도록 제 1 모드와 비교하여 공기 샘플링 시스템에서 흐름이 역전되어 공기 샘플링 입구가 작동된 상태로 작동하게 하는 제 2 모드에서 작동하는 단계를 포함한다. 바람직하게는 제 2 상태는 제 1 상태와 다른 흐름 특징을 가진다. 제 2 상태는 개방되고, 밀폐되고 또는 부분적으로 밀폐된 상태일 수 있다. 상기 방법은 공기 샘플링 시스템에서 충분한 압력을 일으키도록 제 1 모드와 비교하여 공기 샘플링 시스템에서 흐름이 역전되어 공기 샘플링 입구가 제 2 작동된 상태로 작동하게 하는 제 3 모드에서 작동하는 단계를 추가로 포함한다. 바람직하게는 제 3 상태는 제 2 상태와 다른 흐름 특징을 가진다. 제 3 상태는 개방되고, 밀폐되고 또는 부분적으로 밀폐된 상태일 수 있다.
상기 방법은 제 2 및 제 3 상태 사이에서 사이클링을 포함할 수 있다.
상기 방법은 제 1, 제 2 또는 제 3 상태의 임의의 하나 이상에서 샘플링 파이프 네트워크의 적어도 일부에서 공기의 압력 또는 흐름을 측정하여 샘플링 파이프 네트워크에서 결함을 결정하는 단계를 포함할 수 있다. 상기 방법은 제 2 또는 제 3 상태의 적어도 하나에서 샘플링 파이프 네트워크의 적어도 일부를 플러싱하는 단계를 포함할 수 있다. 플러싱 단계는 제 1 상태와 비교하여 샘플링 네트워크에서 흐름을 역전시킴으로써 실행될 수 있다.
이해될 것과 같이, 시스템, 탐지기 또는 보조장치는 본 발명에 기술된 실시태양의 임의의 하나에서 유리하게 사용될 수 있다. 특히 이런 보조장치 및 방법을 사용하면 보조장치의 설치 복잡함을 최소화하는데 이는 추가 통산 라인이 보조장치와 다른 시스템 구성요소 사이에 연결될 필요가 있기 때문이다.
또한 본 발명에 환경으로부터 샘플의 진입을 허용하도록 하나의 덕트 또는 각각의 덕트의 길이를 따라 위치한 복수의 샘플링 입구를 가진 적어도 하나의 신장된 샘플링 덕트를 가진 형태의 환경 샘플링 시스템에서 방법이 개시되며, 상기 환경 샘플링 시스템은 샘플에서 위험 물질의 존재를 탐지하기 위해 샘플링 입구를 통해 환경으로부터의 샘플을 덕트 속으로 끌어당기고 덕트를 통해 샘플을 분석 장치로 전달하도록 구성되며, 상기 방법은 다음:
위험 물질의 존재 또는 농도가 관찰되는 탐지 모드에서 작동하는 단계, 적어도 하나의 기준이 충족되는 경우에, 시스템은 어느 샘플링 입구를 통해 위험 물질이 시스템에 들어갔는지를 측정하는 위치측정 모드로 작동하는 단계를 실행한다.
상기 방법은 위치측정 모드에서 어느 샘플링 입구를 통해 위험 물질이 시스템에 들어갔는지를 측정하는지의 측정을 가능하게 하도록 적어도 하나의 샘플링 덕트를 통해 분석 장치로의 샘플 흐름의 특징을 묘사하는 훈련 모드로 작동하는 단계를 포함할 수 있다.
위치측정 모드는 샘플 확대 단계 및 수송 단계를 포함할 수 있다.
위치측정 모드는 정화 단계를 포함할 수 있다.
다른 양태에서 입자의 존재에 대한 일련의 물리적 위치를 관찰하도록 구성된 입자 탐지 시스템이 제공되며, 입자 탐지 시스템은 입자 탐지기 및 분석을 위해 일련의 물리적 위치로부터 입자 탐지기로 공기 샘플을 전달하기 위한 샘플링 파이프 네트워크를 포함하며, 상기 샘플링 파이프 네트워크는 상기 물리적 위치의 각각이 공기 샘플이 샘플링 파이프 네트워크 속으로 끌어당겨지는 샘플 입구 장치를 갖도록 배열되며, 상기 샘플 입구 장치의 각각은 개별 샘플링 연결 위치에서 샘플링 파이프에 연결되며, 이웃한 물리적 위치의 샘플 입구 장치 사이의 평균 거리는 샘플링 파이프 네트워크 내의 흐름 통로를 따라 측정될 때 이웃한 물리적 위치의 샘플 연결 위치 사이의 평균 거리보다 작다.
샘플 입구 장치가 여러 샘플 입구를 포함하는 경우 샘플 입구의 중심은 이웃한 장치(들)까지의 거리를 측정하는데 사용될 수 있다. 유사하게는 물리적 위치의 샘플링 연결 위치가 샘플링 파이프에 대한 여러 연결 지점을 포함하는 경우 여러 연결 지점의 중심은 흐름 통로를 따라 이웃까지의 거리를 측정하는데 사용될 수 있다.
일부 실시태양에서 샘플링 파이프는 서비스를 제공하도록 관찰되는 지역을 통해 통과하며, 다른 실시태양에서 샘플링 파이프는 지역 근처를 지나나 통과하지 않는다(지역에 서비스를 제공하기 위해 샘플링 파이프가 방의 천장 위 또는 관찰되는 장비 캐비넷 외부를 지나는 경우와 같이).
바람직한 실시태양에서 샘플링 파이프는 샘플링 파이프에 의해 서비스가 제공되는 지역을 지나서 또는 통과하여 연장되는 제 1 부분 및 제 1부분에 의해 서비스가 제공되는 적어도 하나의 지역을 지나서 또는 통과하여 연장되는 제 1 부분의 샘플링 파이프 네트워크 상류에 연결된 제 2 부분을 포함한다. 바람직하게는 제 2 부분은 제 1 부분이 지나서 또는 통과하여 연장되는 복수의 지역을 지나서 또는 통과하여 연장된다. 가장 바람직하게는 제 2 부분은 제 1 부분이 지나서 또는 통과하여 연장되는 지역의 대부분을 지나서 또는 통과하여 연장된다.
일부 형태에서 제 1 및 제 2 부분은 실질적으로 나란히 연장되며, 가장 바람직하게는 서로 평행하게 이어진다.
한 바람직한 형태에서 제 2 부분은 제 1 부분에 의해 서비스가 제공된 위치 사이에 위치된 위치에 서비스를 제공한다. 가장 바람직하게는 서로에 인접하게 위치한 위치는 파이프 네트워크의 제 1 및 제 2 부분에 의해 교대로 서비스가 제공된다. 이런 배열은 샘플링 파이프 네트워크의 흐름 통로를 따라 연결 지점을 퍼뜨리는 역할을 하며, 이는 입자 위치측정에 불명확함을 감소시키는 것을 돕는다.
지역의 샘플 입구 장치의 연결 지점이 샘플링 파이프 네트워크의 공통 부분의 소정의 부분에 만들어지는 경우 지역은 샘플링 파이프 네트워크의 공통 부분의 소정(예를 들어, 제 1 또는 제 2) 부분에 의해 서비스가 제공되는 것으로 생각해야 한다. 다른 양태에서 복수의 지역에서 입자를 관찰하도록 배열된 입자 탐지 시스템이 제공되며, 상기 입자 탐지 시스템은 입자 탐지기 및 분석을 위해 입자가 탐지기로 수송되도록 끌어당겨지는 복수의 샘플 입구를 포함하는 샘플링 파이프 네트워크를 포함한다. 상기 샘플링 입구는 특정 지역으로부터 샘플을 끌어당기도록 배열되며, 샘플링 파이프 네트워크는 일렬로 서로 연결된 나란한 복수의 파이프를 포함하며, 샘플링 입구는 복수의 나란한 파이프의 길이를 따라 서로 실질적으로 인접하게 위치한 적어도 2개의 지역에 해당하는 샘플링 입구는 복수의 파이프의 다른 부재에 연결된다. 가장 바람직하게는 복수의 파이프를 가질 때 연속적으로 인접한 지역의 샘플링 입구는 제 1 또는 제 2 파이프에 교대로 연결된다.
본 발명의 다른 양태에서 위치를 보호하도록 배열된 입자 탐지기에 테스트 물질을 전달하기 위한 전달 시스템; 테스트 물질을 전달하기 위해 전달 시스템을 활성화하는 활성화 수단; 활성화는 위치의 이미지를 캡처하도록 배열된 이미지 캡처 시스템에 의해 자동으로 탐지되도록, 전달 시스템의 활성화를 신호로 표시하는 식별자를 포함하는 장치가 제공된다.
상기 장치는 활성화에 관한 데이터가 저장 또는 전송을 위해 장치 속에 입력되게 하는 인터페이스를 더 포함할 수 있다. 전달 시스템은 테스트 물질 발생기; 테스트 물질 발생기로부터 입자 탐지기로 테스트 물질을 전달하기 위한 덕트; 장치를 통해 입자 탐지기로 테스트 물질을 이동시키기 위한 팬, 펌프 등의 적어도 하나를 포함할 수 있다. 식별자는 바람직하게는 이미지에 캡처를 위한 복사에너지를 방출하도록 구성된 하나 이상의 복사에너지 방출기를 포함한다. 장치는 장치로 및/또는 장치로부터 입자 탐지 시스템 또는 비디오 캡처 시스템과 같은 외부 장치에 데이터 전송을 가능하게 하는 동기화 포트를 포함할 수 있다.
다른 양태에서 본 발명은 입자 탐지 시스템에서 주소를 상호연관하기 위한 방법을 제공하며, 상기 주소는 물리적 위치에 해당하며, 위치는 복수의 위치를 관찰하는 비디오 캡처 시스템에서 관찰되며; 상기 방법은 주소에서 입자 탐지 시스템의 입자 탐지를 일으키는 단계; 주소에 해당하는 물리적 위치를 시각적으로 나타내는 단계; 비디오 캡처 시스템에 의해 캡처된 적어도 하나의 이미지에서 물리적 위치의 시각적 표시를 확인하는 단계; 비디오 캡처 시스템에 의해 관찰된 복수의 위치의 위치를 주소와 상호연관하는 단계를 포함한다.
상기 방법은 바람직하게는 시각적 표시가 확인된 적어도 하나의 이미지를 캡처한 카메라; 시각적 표시가 확인된 적어도 하나의 이미지를 캡처한 카메라의 팬, 틸트 또는 줌 변수의 하나 이상과 주소를 상호연관하는 단계를 포함한다.
상기 방법은 입자가 입자 탐지 시스템에 의해 주소에서 탐지되는 경우에 입자 탐지 시스템에서 주소에 해당하는 이미지의 선택적 캡처, 저장 또는 디스플레이를 가능하게 하도록 비디오 캡처 시스템에 상호연관 데이터를 제공하는 단계를 포함할 수 있다. 본 발명에 기술된 대로 이것은 입자 탐지 사건의 비디오 확인을 가능하게 한다.
주소에 해당하는 물리적 위치를 시각적으로 표시하는 단계는 비디오 캡처 시스템에 의해 캡처된 이미지에서 캡처되고 확인될 수 있는 복사에너지를 방출하는 단계를 포함할 수 있다. 이것은 탐지가능한 패턴으로 복사에너지 공급원을 선택적으로 활성화하는 단계를 포함할 수 있다. 예를 들어 광원을 온-오프 조절한다.
입자 탐지 시스템에서 입자의 탐지를 일으키는 단계는 바람직하게는 주소에서 입자 탐지 시스템에 의해 탐지되도록 물리적 위치에서 또는 근처에서 입자를 방출하는 단계를 포함한다.
주소에서 입자 탐지 시스템의 입자의 탐지를 일으키고 주소에 해당하는 물리적 위치를 시각적으로 표시하는 단계는 바람직하게는 입자 탐지 시스템에서 입자 탐지 사건과 함께 비디오 캡처 시스템에 의해 캡처된 이미지들 사이의 일시적 상호연관을 가능하게 하도록 동시에 실행된다.
가장 바람직하게는 상기 방법은 본 발명의 이전 양태의 장치를 사용하여 실행된다.
본 발명의 내용 중에 포함되어 있다.
본 발명의 예시적 실시태양은 첨부된 도면을 참조하여 비 제한적인 실시예에 의해 이제 기술될 것이다.
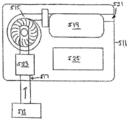
도 1은 공기 샘플링 네트워크를 포함하는 입자 탐지 시스템을 도시한다.
도 2는 연기가 공기 샘플링 네트워크에 들어가는 위치의 측정을 가능하게 하도록 2개의 입자 탐지기를 사용하는 입자 탐지 시스템을 도시한다.
도 3은 밸브에 의해 분리된 2개의 가지를 가진 공기 샘플링 네트워크에 결합된 단일 입자 탐지기를 사용하는 입자 탐지 시스템을 도시한다.
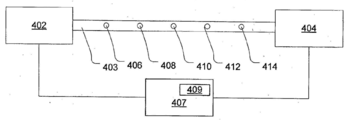
도 4는 단일 공기 샘플링 파이프라인에 결합된 2개의 입자 탐지기를 사용하는 입자 탐지 시스템을 도시한다.
도 5 및 6은 입자 탐지 시스템의 개별 탐지기(또는 가지)에서 측정된 대로 사건의 시점을 그래프로 예시한다.
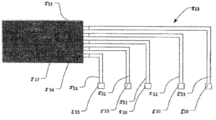
도 7은 입자가 시스템에 들어가는 위치를 측정하기 위해 사용된 입자 탐지 시스템의 다른 실시예를 예시한다.
도 8은 [본 발명의 한 양태의 실시태양을 실시하기 위해] 샘플링 시스템의 샘플링 변수를 변화시키기 위한, 복수의 밸브를 포함하는 샘플 시스템을 포함하는 입자 탐지 시스템을 예시한다.
도 9a는 [본 발명의 한 양태의 실시태양을 실시하기 위해] 샘플링 시스템의 샘플링 변수를 변화시키도록 구성된 복수의 필터를 포함하는 샘플링 시스템을 포함하는 입자 탐지 시스템을 예시한다.
도 9b는 도 9a의 시스템에 사용된 필터 및 밸브 장치를 예시한다.
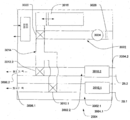
도 10a는 본 발명의 한 바람직한 실시태양에 따른 입자 탐지 시스템의 개략도이다.
도 10b는 도 10a의 입자 탐지 시스템의 일부의 개략도이다.
도 10c는 밸브들 중 하나가 부분적으로 밀폐된 위치에 있는 것을 제외하고 도 10b에 따른 입자 탐지 시스템의 일부를 개략도이다.
도 10d는 다른 밸브들의 하나가 부분적으로 밀폐된 것을 제외하고 도 10c에 따른 부분의 개략도이다.
도 11a는 입자 탐지 시스템을 예시한다.
도 11b는 샘플 일부가 덕트 아래로 이동함에 따라 샘플의 전면의 확산을 예시하는 그래프이다.
도 11c는 도 11a의 샘플 덕트 내의 유속 프로파일을 예시한다.
도 12는 도 11b에 예시된 확산의 작용을 개선할 수 있는 본 발명의 다른 실시태양에 따른 3개의 샘플링 지점을 예시한다.
도 13a 내지 13d는 도 11b에 예시된 확산의 작용을 개선할 수 있는 난류촉진기(tubulator)의 예들이다.
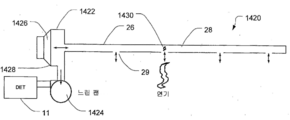
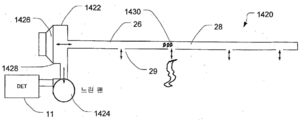
도 14는 입자 탐지 시스템 내의 다른 샘플링 입구에 의한 샘플 희석을 상쇄하기 위해 공기 샘플링 덕트 내에서 샘플 흐름의 방향을 변동시키는데 사용될 수 있는 벨로우(bellow)에 연결된 공기 샘플링 네트워크를 포함하는 입자 탐지 시스템을 예시한다.
도 14a 내지 14e는 도 14의 방식과 유사한 방식으로 샘플 확대를 실행하기 위해 진동 막을 사용하는 예시적 시스템을 예시한다.
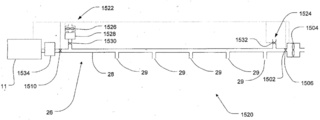
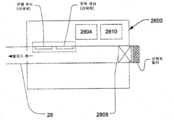
도 15는 입자 탐지 시스템 내의 다른 샘플링 입구에 의한 샘플 희석을 상쇄하는데 사용될 수 있는 상류 팬을 가진 공기 샘플링 시스템을 포함하는 입자 탐지 시스템을 예시한다.
도 15b는 샘플 배출 시스템에 의해 증가된 도 14의 시스템과 유사한 입자 탐지 시스템을 예시한다.
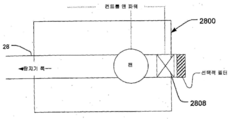
도 16은 분석을 위해 덕트에서 샘플의 수송을 증가시키도록 샘플링 덕트의 말단을 입자 탐지기로 개방하는데 사용될 수 있는 샘플링 입구의 상류 밸브를 포함하는 공기 샘플링 시스템을 가진 입자 탐지 시스템을 예시한다.
도 17은 도 14a 내지 14e의 시스템의 변형예를 예시한다.
도 18은 복수의 진동 막을 포함하는 샘플 확대 장치를 가진 공기 샘플링 네트워크를 포함하는 입자 탐지 시스템을 예시한다.
도 19는 갈라진 샘플링 파이프를 가지며 복수의 진동 막을 포함하는 샘플 확대 장치를 가진 공기 샘플링 네트워크를 포함하는 다른 입자 탐지 시스템을 예시한다.
도 20a 및 20b는 전용 위치측정 모듈을 포함하는 각각 도 14 및 15의 시스템에 대한 변형을 예시한다.
도 21은 일련의 지역에서 입자를 탐지하도록 준비된 본 발명의 한 실시태양에 따른 입자 탐지 시스템을 예시한다.
도 22 및 23은 일련의 지역에서 입자를 탐지하도록 준비된 본 발명에 따른 시스템의 추가 두 실시태양을 예시한다.
도 24는 비디오 안전 시스템을 사용하는 비디오 확인을 포함하는 입자 탐지 시스템을 예시한다.
도 25 및 26은 도 24의 시스템에서 비디오 확인을 위해 사용된 예시적 사용자 인터페이스를 예시한다.
도 27은 도 24에 예시된 형태의 시스템을 커미셔닝(commissioning) 및/또는 테스트하는데 사용된 장치의 개략도이다.
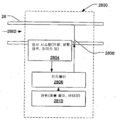
도 28은 다른 시스템 구성요소로부터의 기류 경로에서 흐름을 변화 또는 상태를 감지하여 감지된 변화 또는 상태에 반응하여 작동을 제어하도록 준비된 예시적 보조기구, 이 경우 밸브이다.
도 29는 도 28과 연관하여 기술된 보조기구를 포함하는 입자 탐지 시스템을 예시한다.
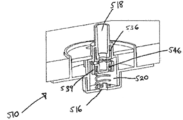
도 30은 위치측정 모듈의 한 실시태양을 예시한다.
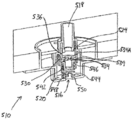
도 31은 여러 샘플링 파이프가 연결될 수 있는 위치측정 모듈의 다른 실시태양을 예시한다.
도 32 및 33은 도 28의 보조기구와 유사한 보조기구의 추가 실시태양을 예시한다.
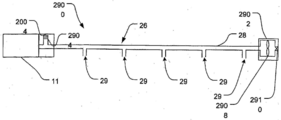
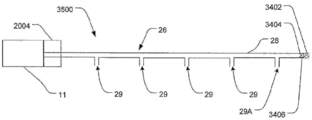
도 34는 샘플링 입구의 적어도 하나의 개구부 상류를 가진 샘플링 파이프를 포함하는 샘플링 네트워크를 가진 입자 탐지 시스템을 예시하며, 본 발명의 한 실시태양에 따른 국소화 방법을 실시할 수 있다.
도 35는 밸브를 추가로 포함하며 본 발명의 다른 양태의 한 실시태양에 따른 방법을 사용하여 공기 샘플링 네트워크(또는 이의 일부)의 작동을 테스트하기 위하여 방법의 한 실시태양을 예시하는데 사용된 도 34의 입자 탐지 시스템과 유사한 입자 탐지 시스템을 예시한다.
도 36은 본 발명의 한 실시태양에 따른 입자 탐지기의 개략적 도면이다.
도 37은 본 발명의 한 실시태양에 따른 샘플링 네트워크의 개략적 도면이다.
도 38은 본 발명의 다른 실시태양에 따른 샘플링 네트워크의 개략적 도면이다.
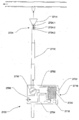
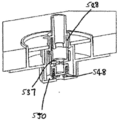
도 39는 정상적인 작동 형태로 도시된 본 발명의 한 실시태양에 따른 샘플 입구의 단면도이다.
도 40은 밀폐된 형태로 도시된 도 39의 샘플 입구의 단면도이다.
도 41은 작동된 형태로 도시된 도 39의 샘플 입구의 단면도이다.
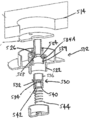
도 42는 도 39의 샘플 입구의 분리 단면도이다.
도 43a 및 43b는 도 39의 샘플 입구를 도시하며 각각 제 1 및 제 2 흐름 통로가 이를 통과하는 것을 예시한다.
도 1은 공기 샘플링 네트워크를 포함하는 입자 탐지 시스템을 도시한다.
도 2는 연기가 공기 샘플링 네트워크에 들어가는 위치의 측정을 가능하게 하도록 2개의 입자 탐지기를 사용하는 입자 탐지 시스템을 도시한다.
도 3은 밸브에 의해 분리된 2개의 가지를 가진 공기 샘플링 네트워크에 결합된 단일 입자 탐지기를 사용하는 입자 탐지 시스템을 도시한다.
도 4는 단일 공기 샘플링 파이프라인에 결합된 2개의 입자 탐지기를 사용하는 입자 탐지 시스템을 도시한다.
도 5 및 6은 입자 탐지 시스템의 개별 탐지기(또는 가지)에서 측정된 대로 사건의 시점을 그래프로 예시한다.
도 7은 입자가 시스템에 들어가는 위치를 측정하기 위해 사용된 입자 탐지 시스템의 다른 실시예를 예시한다.
도 8은 [본 발명의 한 양태의 실시태양을 실시하기 위해] 샘플링 시스템의 샘플링 변수를 변화시키기 위한, 복수의 밸브를 포함하는 샘플 시스템을 포함하는 입자 탐지 시스템을 예시한다.
도 9a는 [본 발명의 한 양태의 실시태양을 실시하기 위해] 샘플링 시스템의 샘플링 변수를 변화시키도록 구성된 복수의 필터를 포함하는 샘플링 시스템을 포함하는 입자 탐지 시스템을 예시한다.
도 9b는 도 9a의 시스템에 사용된 필터 및 밸브 장치를 예시한다.
도 10a는 본 발명의 한 바람직한 실시태양에 따른 입자 탐지 시스템의 개략도이다.
도 10b는 도 10a의 입자 탐지 시스템의 일부의 개략도이다.
도 10c는 밸브들 중 하나가 부분적으로 밀폐된 위치에 있는 것을 제외하고 도 10b에 따른 입자 탐지 시스템의 일부를 개략도이다.
도 10d는 다른 밸브들의 하나가 부분적으로 밀폐된 것을 제외하고 도 10c에 따른 부분의 개략도이다.
도 11a는 입자 탐지 시스템을 예시한다.
도 11b는 샘플 일부가 덕트 아래로 이동함에 따라 샘플의 전면의 확산을 예시하는 그래프이다.
도 11c는 도 11a의 샘플 덕트 내의 유속 프로파일을 예시한다.
도 12는 도 11b에 예시된 확산의 작용을 개선할 수 있는 본 발명의 다른 실시태양에 따른 3개의 샘플링 지점을 예시한다.
도 13a 내지 13d는 도 11b에 예시된 확산의 작용을 개선할 수 있는 난류촉진기(tubulator)의 예들이다.
도 14는 입자 탐지 시스템 내의 다른 샘플링 입구에 의한 샘플 희석을 상쇄하기 위해 공기 샘플링 덕트 내에서 샘플 흐름의 방향을 변동시키는데 사용될 수 있는 벨로우(bellow)에 연결된 공기 샘플링 네트워크를 포함하는 입자 탐지 시스템을 예시한다.
도 14a 내지 14e는 도 14의 방식과 유사한 방식으로 샘플 확대를 실행하기 위해 진동 막을 사용하는 예시적 시스템을 예시한다.
도 15는 입자 탐지 시스템 내의 다른 샘플링 입구에 의한 샘플 희석을 상쇄하는데 사용될 수 있는 상류 팬을 가진 공기 샘플링 시스템을 포함하는 입자 탐지 시스템을 예시한다.
도 15b는 샘플 배출 시스템에 의해 증가된 도 14의 시스템과 유사한 입자 탐지 시스템을 예시한다.
도 16은 분석을 위해 덕트에서 샘플의 수송을 증가시키도록 샘플링 덕트의 말단을 입자 탐지기로 개방하는데 사용될 수 있는 샘플링 입구의 상류 밸브를 포함하는 공기 샘플링 시스템을 가진 입자 탐지 시스템을 예시한다.
도 17은 도 14a 내지 14e의 시스템의 변형예를 예시한다.
도 18은 복수의 진동 막을 포함하는 샘플 확대 장치를 가진 공기 샘플링 네트워크를 포함하는 입자 탐지 시스템을 예시한다.
도 19는 갈라진 샘플링 파이프를 가지며 복수의 진동 막을 포함하는 샘플 확대 장치를 가진 공기 샘플링 네트워크를 포함하는 다른 입자 탐지 시스템을 예시한다.
도 20a 및 20b는 전용 위치측정 모듈을 포함하는 각각 도 14 및 15의 시스템에 대한 변형을 예시한다.
도 21은 일련의 지역에서 입자를 탐지하도록 준비된 본 발명의 한 실시태양에 따른 입자 탐지 시스템을 예시한다.
도 22 및 23은 일련의 지역에서 입자를 탐지하도록 준비된 본 발명에 따른 시스템의 추가 두 실시태양을 예시한다.
도 24는 비디오 안전 시스템을 사용하는 비디오 확인을 포함하는 입자 탐지 시스템을 예시한다.
도 25 및 26은 도 24의 시스템에서 비디오 확인을 위해 사용된 예시적 사용자 인터페이스를 예시한다.
도 27은 도 24에 예시된 형태의 시스템을 커미셔닝(commissioning) 및/또는 테스트하는데 사용된 장치의 개략도이다.
도 28은 다른 시스템 구성요소로부터의 기류 경로에서 흐름을 변화 또는 상태를 감지하여 감지된 변화 또는 상태에 반응하여 작동을 제어하도록 준비된 예시적 보조기구, 이 경우 밸브이다.
도 29는 도 28과 연관하여 기술된 보조기구를 포함하는 입자 탐지 시스템을 예시한다.
도 30은 위치측정 모듈의 한 실시태양을 예시한다.
도 31은 여러 샘플링 파이프가 연결될 수 있는 위치측정 모듈의 다른 실시태양을 예시한다.
도 32 및 33은 도 28의 보조기구와 유사한 보조기구의 추가 실시태양을 예시한다.
도 34는 샘플링 입구의 적어도 하나의 개구부 상류를 가진 샘플링 파이프를 포함하는 샘플링 네트워크를 가진 입자 탐지 시스템을 예시하며, 본 발명의 한 실시태양에 따른 국소화 방법을 실시할 수 있다.
도 35는 밸브를 추가로 포함하며 본 발명의 다른 양태의 한 실시태양에 따른 방법을 사용하여 공기 샘플링 네트워크(또는 이의 일부)의 작동을 테스트하기 위하여 방법의 한 실시태양을 예시하는데 사용된 도 34의 입자 탐지 시스템과 유사한 입자 탐지 시스템을 예시한다.
도 36은 본 발명의 한 실시태양에 따른 입자 탐지기의 개략적 도면이다.
도 37은 본 발명의 한 실시태양에 따른 샘플링 네트워크의 개략적 도면이다.
도 38은 본 발명의 다른 실시태양에 따른 샘플링 네트워크의 개략적 도면이다.
도 39는 정상적인 작동 형태로 도시된 본 발명의 한 실시태양에 따른 샘플 입구의 단면도이다.
도 40은 밀폐된 형태로 도시된 도 39의 샘플 입구의 단면도이다.
도 41은 작동된 형태로 도시된 도 39의 샘플 입구의 단면도이다.
도 42는 도 39의 샘플 입구의 분리 단면도이다.
도 43a 및 43b는 도 39의 샘플 입구를 도시하며 각각 제 1 및 제 2 흐름 통로가 이를 통과하는 것을 예시한다.
도 1은 샘플링 네트워크(28)와 유체를 전달하는 입자 탐지기(11)를 포함하는 입자 탐지 시스템을 도시한다. 샘플링 네트워크는 공기가 끌어당겨지는 복수의 입구(29)를 포함한다. 흡입기(16)는 입구(21)를 통해 샘플링 네트워크(28) 속으로 공기를 끌어당기고 입자 탐지기 챔버(14)를 따라 속으로 공기를 끌어당긴다. 공기 샘플은 출구(22)를 통해 탐지 시스템을 빠져나간다.
탐지기는 유량 센서(24)를 포함한다. 본 발명의 한 바람직한 실시태양에서, WO 2004/102499에 기술된 초음파 유량 센서가 사용된다. 이 센서는 체적유량 측정이 이루어지게 한다. 유량 센서(24)는 단위시간당 샘플링 네트워크(28)로부터 입자 탐지기(10) 속으로 흐르는 공기 부피의 표시를 제공한다. 유량 센서(24)의 산출량은, 예를 들어, 흐름 결함, 예를 들어, 샘플링 네트워크(28)의 봉쇄 또는 감소된 흡입기 성능이 발생했는지를 추론하는데 사용될 수 있다.
시스템(10)은 또한 탐지기(14)의 산출량을 기초로 공기 샘플에서 입자의 수준을 측정하고 탐지기가 산출량에 대한 경보 및 결함 추론을 제공하며 사용자에게 입자의 존재 및 시스템의 작동 상태를 경고하기 위한 컨트롤러(40)를 포함한다. Xtralis Pty Ltd로부터의 Vesda 또는 ICAM 탐지기의 전형적인 장치가 이런 형태의 시스템의 한 예일 것이다.
이런 탐지 시스템은 공기 샘플링 네트워크(28) 속의 입자의 출입 지점을 추가로 측정하기 위해 본 발명의 한 실시태양에 적용될 수 있다.
도 2는 2개의 입자 탐지기(202 및 204)를 나타내며, 각각의 입자 탐지기는 도 1에 예시된 형태이다. 각각의 탐지기는 샘플링 네트워크(203 및 205)의 개별 파이프에 각각 연결된다. 샘플링 네트워크(203 및 205)는 사실상 평행하며 동일한 지역을 관찰하도록 구성된다. 각각의 탐지기는 또한 미세컨트롤러(209)를 포함하는 제어 장치(207)에 연결된다. 파이프(203)는 복수의 공기 입구(206-216)를 가진다. 유사하게는, 파이프(205)는 복수의 공기 입구(218-230)를 가진다. 파이프(203)의 각각의 공기 입구는 이의 평행한 공기 파이프(205)의 입구와 쌍을 이룰 수 있다. 설치시에, 파이프(203)의 각각의 입구는 파이프(205)의 상응하는 입구에 근접하게 위치된다. 따라서 입구들은 쌍으로 배열된다. 예를 들어, 파이프(203)의 공기 입구(206) 및 파이프(205)의 공기 입구(218)는 함께 분류된 공기 샘플링 입구 쌍(232)인데, 공기 입구(206) 및 공기 입구(218)는 아주 가깝게 위치하기 때문이다. 예를 들어 입구들의 각 쌍은 한 줄의 구멍의 동일한 공간에 위치될 수 있거나 심지어 공통의 샘플링 지점에 부착될 수 있다.
정상적인 작업에서, 입자 탐지기(202)의 흡입기는 공기 파이프(203)를 끌어당긴다. 입자 탐지기(204)의 흡입기는 파이프(205)를 통해 공기를 끌어당긴다. 각각의 입자 탐지기가 공기를 끌어당김에 따라, 산란된 빛 또는 "연기 수준"이 측정되고 제어 장치(207)에 보고된다. 제어 장치(207)의 마이크로컨트롤러(209)는 내부 메모리에 보고된 연기 수준을 저장한다.
연기가 공기 샘플링 입구 쌍(232)에서 공기 샘플링 네트워크에 들어가는 경우, 공기 입구(206)로부터 입자 탐지기(202)에 도달하기 위해 연기가 이동해야만 하는 거리는 공기 입구(218)로부터 입자 탐지기(204)에 도달하기 위해 연기가 이동해야만하는 거리보다 훨씬 작다. 따라서, 입자 탐지기(202)는 입자 탐지기(204) 앞의 공기 샘플링 입구 쌍(232)에 들어가는 연기 때문에 증가된 연기 수준을 등록할 것이다.
탐지기(202, 204)의 하나, 예를 들어, 입자 탐지기(202)의 탐지된 연기 수준이 소정의 임계값(또한 경보 임계값일 수 있거나 아닐 수 있음)을 초과할 때, 마이크로컨트롤러는 탐지기의 하나 또는 모두를 통해 끌어당겨진 공기의 부피를 관찰하기 시작한다. 공기 입구(218)에 주입된 연기는 탐지기(204)에서 탐지되기 전에 샘플링 파이프(205)의 길이를 따라 이동해야하기 때문이다. 입자 탐지기(204)가 일부 부피의 공기를 끌어당긴 후, 입자 탐지기(204)는 입자 탐지기(202)에 의해 나타난 것과 유사한 증가된 연기 수준을 기록할 것이다. 이 증가된 연기 수준이 기록될 때, 마이크로컨트롤러(209)는 탐지기(204)를 통해 끌어당겨진 공기의 부피 관찰을 종료한다. 이런 최종 부피는 연기가 공기 샘플링 파이프에 들어간 샘플링 구멍을 결정하는데 사용될 수 있다.
유량 센서, 예를 들어, 24는 체적 유량을 산출하기 때문에, 탐지기를 통해 통과하는 공기의 부피는 시간에 따른 유량 센서의 산출량을 합침으로써 측정된다. 예를 들어, 유량은 센서에 의해 초당 1회 이상 산출될 수 있다. 이런 부피는 통과된 샘플 공기의 전체 부피를 측정하기 위해 탐지기 자체 또는 마이크로컨트롤러(209)에 축적될 수 있다.
그런 후에 마이크로컨트롤러(209)는 탐지기(204)에 의해 끌어당겨진 공기의 측정된 부피를 사용하여 연기 입자가 주입된 샘플링 입구 쌍을 추론한다. 한 실시태양에서, 마이크로컨트롤러는 아래와 같은 룩업 테이블(lookup table)을 참고함으로써 이것을 성취한다.

룩업 테이블은 상응하는 샘플링 구멍 쌍에 대해 지도식 도표로 나타낸 측정 부피를 포함한다. 각각의 부피는 입자가 제 2 탐지기에 의해 탐지되기 전 제 2 탐지기를 통해 끌어당겨진 공기의 부피에 해당한다. 음성 및 양성 값은 쌍(202 또는 204)의 어느 탐지기가 부피를 측정하는지를 나타낸다. 이 경우 음의 값은 탐지기(202)가 부피를 측정한다는 것을 나타낸다.
예를 들어, 마이크로컨트롤러(209)는 탐지기(202)에 의한 연기 탐지 사건과 탐지기(204)에 의한 후속 탐지 사건 사이의 시간 동안 탐지기(204)를 통해 끌어당겨진 공기의 부피 112mL를 측정할 수 있다. 이 부피에 가장 근사하게 해당하는 부피를 가진 표의 열은 4번째 열이고 쌍 4에 해당한다. 차례로, 쌍 4는 공기 입구 쌍(238)에 해당한다. 측정된 부피가 -112mL인 경우, 가장 가까운 표 열은 -100mL에 대한 입구이었을 것이며, 쌍 3(공기 입구 쌍(236))은 연기가 시스템에 들어가는 지점으로 측정될 것이다.
이해될 것과 같이, 부피를 직접 측정하는 것 대신 부피에 해당하는 값이 본 발명의 다른 실시태양에서 사용될 수 있다. 예를 들어 시스템을 통해 통과된 공기 샘플의 양은 체적 유량 이외의 변수를 측정함으로써 측정될 수 있고, 예를 들어, 질량 유량 센서가 탐지기에 존재하는 경우 이런 센서의 산출량은 유체의 온도 또는 밀도를 보정하는 보정 인자에 의한 부피와 관련이 있기 때문에 본 발명의 한 실시태양에 사용될 수 있다.
또한 길이, 압력 또는 온도 또는 부피-관련 사건의 총합을 포함하나 이에 제한되지 않는 다른 물리적 변수들이 사용될 수 있다. 예를 들어, 샘플 유량의 시간 가변 속도는 위치에서 측정될 수 있고(예를 들어 ms-1) "길이"의 형태로 시스템을 통해 통과된 공기의 양을 측정하기 위해 누적될 수 있다(예를 들어, 합산 또는 통합 등). 부피는 또한 피스톤을 이동시키는 공기 샘플(또는 공지된 이의 비율)을 사용함으로써 "길이"로서 나타낼 수 있다. 수집된 샘플(또는 이의 고정 비율)에 의한 피스톤의 전체 변위는 시스템을 통해 통과된 공기량의 측정값을 나타낼 것이며, 선택적으로 작은 실린더 크기의 경우 피스톤의 사이클 수는 시스템을 통해 통과된 공기 샘플의 부피에 해당하는 수치 값을 가져오도록 계수될 수 있다.
시스템을 통해 통과하는 공기의 양을 측정하는데 사용된 물리적 변수가 압력 또는 온도인 실시예를 제공하기 위해서, 공기 샘플(또는 공기 샘플 부피의 공지된 비율)이 밀폐된 시스템의 제 1 챔버에 포획되는 시스템을 고려하고, 이런 양의 공기의 실제 부피 V1(또는 부피가 고정된 경우 압력)는 전혀 알려지지 않을 수 있다. 그러나 포획된 샘플의 온도 T1 및 압력 P1(또는 압력이 고정된 경우 부피)이 측정되는 경우, 포획된 샘플은 알려진 제 2 챔버로 이동하며, 부피 V2 및 새로운 온도 T2 및 압력 P2는 보일의 법칙에 의해 최초 부피와 관련이 있다. 샘플(또는 동일한 부분)의 제 2 챔버로의 이동 동안 일정하게 유지될 압력 또는 온도 중 하나를 제어함으로써 온도 또는 압력은 시스템을 통해 통과된 샘플 공기의 부피와 관련이 있는 양으로 사용될 수 있다.
질량, 압력, 온도 및 길이 또는 측정될 수 있고 가변 유량에 관대한 다른 물리적 변수와 같은 값의 측정값이 부피 대신에 사용되는 경우, 룩업 테이블은 선택적으로 부피를 계산하는 중간 단계를 실시할 필요 없이 이런 다른 물리적 변수를 직접 공기 입구 쌍 번호에 대해 지도로 나타낼 수 있다.
일단 공기 입구 쌍 번호가 측정되면, 공기 입구 쌍 번호는 제 2 장치, 예를 들어, 화재 경보 컨트롤 패널(FACP)에 전달되거나 사용자에게 디스플레이되어 화재의 위치측정을 가능하게 한다.
룩업 테이블은 연기를 각 샘플 입구 쌍에 주입하고 탐지 전에 끌어당겨진 공기의 부피를 측정함으로써 시스템의 커미셔닝 동안 생성될 수 있다. 이해될 것과 같이, 연기가 샘플링 쌍(232)에 들어가는 경우, 탐지기(202)에 의한 탐지 후 일정기간 후 탐지기(204)에 의해 끌어당겨진 매우 큰 부피의 공기가 존재할 것인 반면 탐지기(204)는 증가된 연기 수준을 탐지하기 위해 대기한다. 반대로, 연기가 샘플링 쌍(242)을 통해 시스템에 들어간 경우, 탐지기(204)는 탐지기(202)에 앞서 증가된 연기 수준을 탐지할 것이며, 탐지기(202)는 매우 큰 부피의 공기를 끌어당기면서 증가된 연기 수준을 탐지하기 위해 대기한다. 연기가 중간, 예를 들어, 샘플 쌍(236) 쪽으로 샘플링 네트워크에 들어간 경우, 비록 탐지기(202)는 먼저 증가된 연기 수준을 탐지할 것이나, 탐지기(204)에 의한 탐지에 앞서 끌어당겨진 공기의 부피는 첫 번째 경우들 중 하나에서보다 비교적 더 작을 것인데, 이는 탐지기(202)에 의한 탐지시, 연기는 상당거리를 탐지기(204) 쪽으로 이미 끌어당겨질 것이기 때문이다.
당업자는 샘플링 파이프 네트워크 길이가 길며, 샘플링 네트워크를 통한 입자들의 수송 시간이 긴 본 발명의 구성에서, 연기의 위치를 측정하기 전에 연기의 존재를 탐지하는 것이 가능할 것을 알 것이다. 예를 들어, 연기가 도 2의 샘플링 입구 쌍(232)에 주입되는 경우, 샘플링 구멍(206)에 들어가는 연기는 빠르게 탐지기(202)로 진행하여 탐지될 것이다. 연기가 탐지기(204)에 의해 아직 탐지되기 전이라는 사실에도 불구하고, 탐지기(202)는 즉시 경보를 울릴 수 있다. 따라서, 규제가 샘플링 구멍에 주입된 연기가 탐지되어야만 하는 시간을 규정하는 경우, 이런 특정 구성은 연기 입자의 탐지시에 화재의 존재를 탐지하고 보고할 수 있다. 그런 후에 화재의 지리학적 위치의 측정은 경보 수준이 아닌 임계값 수준을 사용하여 미리 기술된 방식으로 진행될 수 있다.
따라서, 한 바람직한 형태로, 각 탐지기에 대한 주소지정 사건을 측정하는데 사용된 임계값은 최저 경보(예를 들어: 사전-경보) 임계값보다 높다. 한 바람직한 실시태양은 더 높은 수준의 입자가 주소지정을 시도하기 전에 탐지될 때까지 기다린다.
한 실시태양에서, 룩업 테이블을 사용하는 대신에, 부피 오프셋이 상수와 곱해져서 연기 입자가 시스템에 들어간 샘플링 네트워크를 따라간 거리를 측정한다. 다른 실시태양에서, 부피 오프셋은, 평가될 때, 입자가 들어간 샘플링 네트워크를 따라간 거리의 추정을 생산하는 함수에서 변수로서 사용된다. 또 다른 실시태양에서, 부피 오프셋은 룩업 테이블에서 인덱스로 사용되고, 최종 참조 값은 파이프를 따라간 거리의 추정이다. 바람직한 실시태양에서, 상기한 증배 상수, 함수 또는 룩업 테이블은 연기를 각 샘플링 구멍 쌍에 주입하고 최종 부피 오프셋을 측정하여 보정 데이터를 생성하는 커미셔닝의 시간에 측정된다. 당업자는 연기를 다른 구멍의 서브세트에 주입하고 샘플링 네트워크에서 샘플링 쌍의 공지된 분포에 의존하여 샘플링 구멍의 서브세트에 대한 결과를 추론하는 것이 가능할 수 있다는 것을 알 것이다.
당업자는 본 발명의 변형은, 예를 들어, 화재의 확산을 측정하도록 만들어질 수 있다는 것을 알 것이다. 시스템에 의해 제공된 정보는 입자가 들어간 것으로 보이는 샘플링 네트워크를 따라간 거리일 수 있으나, 이 거리는 샘플링 입구 쌍에 해당하지 않을 수 있다.
계산된 거리 또는 공기 입구는 최종 사용자에게 직접 제공될 수 있다. 계산된 거리 또는 공기 입구는 또한 화재 경보 컨트롤 패널(FACP)과 같은 다른 시스템에 전달될 수 있다. 화재 경보 컨트롤 패널이 여러 샘플링 지점을 가진 단일 흡입된 연기 탐지기보다는 주소지정가능한 지점 탐지기의 시스템으로부터 데이터를 수신하도록 설계된 경우, 본 시스템은 주소지정가능한 지점 탐지기의 시스템을 모방하여, 개별 주소지정가능한 지점 탐지기를 실제로 사용하지 않고 화재의 지리학적 위치의 FACPs 이해를 사용하는 방식으로 계산된 거리 또는 입구를 화재 경보 컨트롤 패널에 전달할 수 있다.
도 3은 2개의 파이프(303 및 305) 및 1개의 밸브(304)를 포함하는 공기 샘플링 네트워크에 부착된 단일 입자 탐지기를 사용하는 본 발명의 다른 실시태양을 예시한다. 정상 작동시에, 공기는 파이프(303)를 통해 끌어당겨진다. 연기 탐지기(202)가 소정의 임계값 초과의 연기를 탐지할 때, 밸브(304)는 이동하여 파이프(303)를 막으며 공기가 파이프(305)를 통해 흐르게 하며 마이크로컨트롤러(309)는 탐지기(302)를 통해 끌어당겨진 공기의 부피를 기록하기 시작한다. 연기 입자가 탐지기(302)에 의해 탐지될 때, 마이크로컨트롤러(309)는 탐지기(302)를 통해 끌어당겨진 공기의 부피를 기록하는 것을 종료한다. 그런 후에 입자를 다시 탐지하기 전에 공기 샘플링 네트워크(305)를 통해 입자 탐지기(302) 속으로 통과된 공기의 부피는 연기 입자가 파이프(305)에 들어가는 지점을 추론하는데 사용되며, 본 발명에서 기술한 방법 중 임의의 것을 사용한다.
도 4는 단일 공기 샘플링 네트워크에 부착된 2개의 입자 탐지기를 사용하는 또 다른 방법을 도사한다. 최초로, 연기 탐지기(402)가 작동하고 연기 탐지기(404)가 작동하지 않는다. 연기는 공기 입구(408)를 통해 시스템에 들어간다. 연기는 공기 샘플링 네트워크를 통해 끌어당겨지며 연기 탐지기(402)에 의해 탐지된다. 연기 탐지 사건의 측정은 연기 탐지기(402)가 작동하지 않게 하며, 연기 탐지기(404)가 작동하게 하며 마이크로컨트롤러(409)는 탐지기(404)를 통해 끌어당겨진 공기의 부피를 기록하기 시작한다. 연기 탐지기(404)의 흡입기는 연기 탐지기(402)의 흡입기에 의해 유발된 최초 흐름 방향에 반대 방향으로 공기 샘플링 네트워크(403)를 따라 공기를 끌어당긴다. 연기가 단일 공기 입구(408)를 통해서만 들어가는 경우, 연기 탐지기(404)는 공기 입구(408)로부터의 연기가 연기 탐지기에 도달할 때까지 연기를 탐지하지 못한다. 본 발명에 따라, 연기 탐지기(402)에 의한 최초 탐지 후 및 탐지기(404)에 의한 연기의 후속 탐지까지 탐지기(404)에 의해 끌어당겨진 공기의 부피는 연기 입자가 공기 샘플링 네트워크(403)에 들어가는 공기 입구를 측정하는데 사용되며, 본 발명에서 기술한 방법 중 임의의 것을 사용한다.
본 발명자들은 시스템을 통해 끌어당겨진 공기의 부피 또는 공기 샘플링 시스템 속의 입자의 출입 지점을 측정하기 위한 상응하는 값을 사용하는 것이 유리할 수 있다는 것을 인식하였다. 또한, 시간 이외의 부피를 측정함으로써, 시간의 측정과 의지하여 연관된 특정 단점 또는 문제가 개선될 수 있다. 예를 들어, 사용 중에 샘플링 입구가 먼지를 수집하고 수축되면, 더 큰 압력 강하 및 공기의 더 낮은 흐름을 초래한다고 알려져 있다. 이것은 시스템의 수명 동안 공기 샘플에 대한 수송 시간을 변화시키는 것을 의미한다. 그러나 샘플을 탐지기에 제공하도록 배기된 공기의 부피는 배기량 및 주소 사이의 상관관계를 수송 시간 보다 더욱 안정하게 하는 시간에 따라 비교적 일정하다. 또한 밸브 개방 또는 흡입기 개시 사이에 지연이 존재하는 경우, 또는 팬이 예상보다 더욱 느리게 움직이기 시작하는 경우 입자가 다시 탐지되기 전 시스템을 통해 끌어당겨진 공기의 부피는 시간 기반 시스템과 비교하여, 비교적 변하지 않을 것이다. 유리하게는 부피-기반 주소지정 시스템은 유량과 독립적으로 또는 가변 유속의 범위에 걸쳐 작동될 수 있어서, 아래 기술된 것과 같은 기술을 사용할 수 있으며, 시스템은 말단 뚜껑을 열어 탐지기에 대한 샘플의 흐름의 속도를 빠르게 한다.
시간에 따라 센서를 지나 이동하는 공기의 양의 표시를 나타내는, 예를 들어, 질량 유량 센서인 다른 형태의 유량 센서가 본 발명의 실시태양에서 사용될 수 있다. 그러나, 질량 유량 센서는 측정한 공기의 밀도에 민감하지 않기 때문에, 공기의 온도와 같은 다른 정보가 센서를 지나 이동하는 공기의 부피를 측정하는데 필요하다.
상기 본 발명의 실시태양을 실시하는데 발생할 수 있는 추가 어려움 및 종래 기술의 어려움은 두 개의 동일한 연기 탐지 사건이 발생했는지를 신뢰 있게 측정하는 것의 잠재적 어려움인데, 예를 들어, 아날로그로부터 디지털 형태로의 신호 변환 이전 주입된 소음은 연기가 탐지기(202) 또는 탐지기(204)에 의해 탐지될 때 측정 과정을 망칠 수 있다. 본 발명자들은 이런 단점 피하거나 개선하는 개량된 공정을 개발하였다.
도 2의 시스템과 같은 연기 탐지 시스템은 2개의 구별된 데이터 세트 또는 "입자 탐지 프로파일"을 생산한다. 하나의 데이터 세트는 입자 탐지기(202)로부터 얻는다. 제 2 데이터 세트는 입자 탐지기(204)로부터 얻는다. 각각의 데이터 세트는 일련의 측정된 연기 수준을 포함한다. 데이터 세트는 또한 탐지기를 통해 흐르는 공기의 부피 또는 입자 연기 수준이 측정된 시간에 관한 정보를 포함할 수 있다.
다음 실시예에서, 시간에 따른 연기 수준을 관찰하는 시스템을 기술할 것이다. 당업자는 (상기한 대로) 시스템에 의해 끌어당겨진 공기의 부피와 비교한 연기 수준을 측정하도록 만들어질 수 있다는 것을 알 것이나, 그러나 예시를 위해서, 현재 다양한 시간에서 측정한 일련의 연기 수준과 관련된 시스템을 기술한다.
도 5는 입자 탐지 프로파일을 예시한다. 탐지된 연기 수준은 수직축을 따라 나타내어진다. 시간은 수평축을 따라 측정된다. 연기 수준은 도 2의 탐지기(202)에 의해 측정된 수준이다. 도 6은 제 2 입자 탐지 프로파일을 예시한다. 탐지기(204)에 의해 측정된 연기와 관련이 있다는 것을 제외하고, 도 5의 수준과 유사하다.
도면을 비교하면, 탐지기(202)는 불활성화되고 입자 탐지 산출량은 실질적으로 0으로 돌아간 시간(200)에서 최대에 도달하는 연기 수준을 탐지하였다. 탐지기(204)는 시간(300)에서 최대 연기 수준을 탐지한다. 다른 시간은 탐지기(204)에 도달한 연기가 반드시 이동하는 샘플링 네트워크(205)를 따라간 추가 거리에 적어도 부분적으로 영향을 받는다. 각각의 최대의 시간 사이의 차이 또는 각 프로파일이 일부 소정의 임계값, 예를 들어, 수직축 상에서 150의 연기 수준(사용시의 경보 임계값과 다를 수 있다)을 넘어가는 시간의 차이를 사용하여 연기가 입자 탐지 시스템에 들어간 공기 입구를 추정하는 것이 가능하다. 그러나, 더욱 바람직하게는 상호 연관은 도 5 및 도 6에 예시된 데이터를 사용하여 계산될 수 있다.
실 함수 및 연속 함수 f 및 g의 경우, 상호 연관은 아래 식에 따라 계산된다:
당업자는 이 방정식이 본 시스템에서 탐지된 연기 수준과 같은 별개의 측정과 함께 사용하도록 만들어질 수 있다는 것을 알 것이다. 예를 들어, 이런 시스템은 개개의 버퍼, 예를 들어, 링 버퍼에서 각각의 탐지기 데이터의 입자 탐지 프로파일을 임시로 저장함으로써 하드웨어에서 실행될 수 있다. 버퍼는 데이터를 저장하도록 선택될 수 있어서 시스템에 의해 측정가능한 최장 가능한 오프셋은 정확하게 계산될 수 있다. 한 지점에서 상호 연관은, 상기 방정식으로 기술한 대로, 각 쌍의 데이터 요소를 차례로 곱하고 이들을 더함으로써 계산될 수 있다. 이 과정은 각 가능한 오프셋 t에 대해 반복되어 전체 상호-연관 함수를 측정할 수 있다. 상호 연관 함수는 두 입자 탐지 사건 사이의 시간 오프셋을 추정하는데 사용될 수 있다. 이것은 어느 입구 쌍을 통해 입자가 샘플링 파이프 네트워크에 들어갔는지를 추론하는데 사용될 수 있다. 일부 실시태양에서, 상호 연관 함수로부터의 정보는 연기가 시스템에 들어갈 수 있는 추가 지리학적 위치를 결정하는데 사용된다.
한 실시태양에서, 상호-연관 함수의 여러 피크가 확인된다. 시간 오프셋의 목록은 각 피크의 위치 및 상응하는 상호-연관 값을 기초로 계산된다. 시간 오프셋은 연기 출처의 지리학적 위치를 추론하는데 사용된다. 이것은 화재가 발생하는 여러 위치를 잠재적으로 추론하는데 사용될 수 있다.
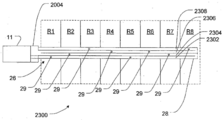
도 7은 파이프(704, 706, 708 및 710) 형태의 공기 샘플링 네트워크와 유체를 전달하는 입자 탐지기(702)를 포함하는 탐지기 입자 탐지 시스템(700)을 예시한다. 각각의 파이프는 샘플링 입구 그룹(712 내지 740) 속에 배열된 복수의 입구를 포함한다. 각각의 샘플링 입구 그룹은 물리적 주소, 예를 들어: 탐지기에 의해 서비스를 제공받는 방 또는 장소에 해당한다. 각 샘플 입구 그룹은 1개 내지 4개의 공기 입구를 포함한다.
입자 탐지기는 각각의 파이프에 연결되며, 컨트롤러에 입자가 각 파이프를 통해 끌어당겨진 유체에서 탐지되었는지 표시를 제공하도록 구성된다. 탐지기(702)는 예를 들어 중앙 컨트롤러에 연결된 4개의 VESDA 연기 탐지기(Xtralis Pty Ltd) 또는 최대 4개 파이프 상의 연기를 독립적으로 탐지할 수 있는 탐지기일 수 있다.
샘플링 입구 그룹(712 내지 740)의 각각은 하나, 둘, 셋 또는 네 개의 개별 샘플링 입구를 포함한다. 입구는 그룹으로 배열되어 동일한 패턴이 2회 일어나지 않는다. 예를 들어, 샘플링 입구 그룹(730)은 각 파이프 상에 입구를 포함하나 다른 그룹은 각 파이프 상에 입구를 포함하지 않는다. 샘플링 입구 그룹(712)은 파이프(710) 상에만 하나의 입구를 포함하나 다른 샘플링 입구 그룹은 파이프(710) 상에 단지 하나의 구멍을 포함하지 않는다. 도 7의 실시예에서 입구는 4-비트 그레이 코드에 해당하는 그룹으로 배열된다.
도 2와 관련된 이전의 논의와 일치하게, 설치시에, 각 그룹의 입구는 서로 근접하게 위치된다. 연기가 특정 입구에서 샘플링 네트워크에 들어가는 경우, 연기는 이 그룹에 존재하는 입구가 있는 파이프의 각각에 들어가야 한다. 예를 들어, 연기가 샘플링 입구 그룹(730)의 위치 근처 샘플링 네트워크에 들어가는 경우, 연기가 그 위치에서 4개의 파이프(704, 706, 708 및 710)의 각각에 들어가는 것을 예상할 수 있다. 반대로, 연기가 샘플링 입구 그룹(712)에서 샘플링 네트워크에 들어가는 경우, 연기가 파이프(710)에만 들어가는 것을 예상할 수 있는데, 이는 그 위치에서, 다른 파이프가 입구를 포함하지 않기 때문이다. 개별 파이프(704, 706, 708 및 710) 속에 끌어당겨진 샘플에서 입자의 탐지시에, 입자 탐지 시스템은 파이프(704, 706, 708 및 710)를 가로지르는 탐지의 패턴에 기초하여 샘플링 네트워크 속의 연기의 출입 지점을 측정할 수 있다.
도 7의 표는 4개의 파이프 및 이들의 상응하는 입자 탐지 위치를 가로질러 입자 탐지 상태의 가능한 조합을 더욱 완벽하게 예시한다. 이것은 표시된 연기 수준을 표현하기 위한 명명법을 정의함으로써 시작하는 것이 유리하다. 본 발명의 목적을 위해서, 파이프(704, 706, 708 및 710)의 각각에 대한 탐지된 연기 수준에 해당하는 4개의 이진수 비트를 사용할 것이다. 예를 들어, 표시 '1111'은 파이프(704, 706, 708 및 710)의 각각으로부터 끌어당겨진 공기에서 일부 임계값 수준의 연기의 탐지에 해당한다. 표시 '1100'은 파이프(704 및 706)의 각각으로부터 끌어당겨진 공기에서 연기의 탐지를 의미할 것이다. 표시 '1010'은 파이프(704 및 708)의 각각으로부터 끌어당겨진 공기에서 연기의 탐지를 의미할 것이다. 따라서, 이런 4개의 비트 표시의 각각은 위치에 해당하는 주소로서 취급될 수 있다. 15개의 영이 아닌 4개의 비트 숫자가 있다. 따라서, 이런 15개 숫자는 15개의 개별 위치를 구별하는데 사용될 수 있다. 도 7의 표는 '그레이 코드' 주소 열에서 가능한 15개의 영이 아닌 이진수의 각각을 나열한다. 각각의 이진수 옆에는 '위치' 열에서 15개 위치 중 하나이다. "탐지된 연기" 열은 연기가 파이프에서 정해진 임계값 수준에서 탐지되었는지를 나타낸다.
각 위치에 주소를 할당하는 많은 수의 가능한 방식이 존재한다. 예를 들어, 일부 실시태양에서, 1부터 15까지의 각 연속 위치는 보통의 계수와 유사한 방식으로 연속 이진수를 가질 수 있다. 이런 체계에 따라, 위치 1은 주소 '0001'(십진수 '1'에 대한 이진수 표현)를 가질 것이고 위치 이진수 주소 '0010'(십진수 '2'에 대한 이진수 표현)를 가질 것이다. 이런 체계에서, 위치 15는 십진수 15에 대한 이진수 표현인 이진수 주소 '1111'가 제공된다.
그러나, 예시된 실시태양은 '그레이 코드'로 불리는 다른 주소 할당 방법을 사용한다. 도 7의 예시된 그레이 코드에서, 위치 1은 주소 '0001'이 제공된다. 위치 2는 주소 '0011'(십진수 '3'에 대한 이진수에 해당)이 제공된다. 위치 3은 주소 '0010'(십진수 '2'에 대한 이진수에 해당)이 제공된다. 이런 넘버링 순서는 이진수 표현의 각각이 고려될 때 특수성을 가진다. 특히, 인접 위치의 각 쌍은 정확하게는 1 비트 다른 이진수 표현을 가진다. 예를 들어, 위치 4는 주소 '0110'를 갖는 반면 위치 5는 주소 '0111'를 가지며 따라서 각 숫자의 단지 네 번째 비트가 다르다. 유사하게, 위치 11은 주소 '1110'을 갖는 반면 위치 12는 주소 '1011'을 가지며 따라서 또한 이들은 두 번째 비트만이 다르다.
주소가 선택되는 방식은 탐지 에러의 존재에서 실행에 영향을 줄 수 있다. 특히 그레이 코드 체계의 사용은 연속 위치가 연속 이진수에 의해 주소지정되는 직선 "계수" 주소 체계보다 에러를 처리하는데 더욱 효과적일 수 있다. 이런 지점을 예시하기 위해, 도 7에 기술된 그레이 코드 넘버링을 채택하는 시스템에서, 화재의 측정된 위치는 단일 비트 에러인 경우 연기의 실제 위치에 인접한 위치가 될 대략 50% 가능성이 있는데, 이는 각 인접 위치의 주소는 단지 단일 비트가 다르기 때문이다.
당업자는 샘플 입구 그룹의 신중한 선택 및 탐지기를 공급하는 파이프 수의 증가는 위치측정 결정을 위해 증가된 여분을 제공할 수 있다는 것을 알 것이다. 실질적인 면에서, 이런 여분의 제공은, 예를 들어, 여러 샘플 입구에서 연기의 동시 출입이 식별될 수 있거나 선택적으로 이런 시스템은 단순히 에러에 더 큰 회복성을 제공할 수 있게 한다.
도 8 및 9는 도 1에 기술된 형태의 흡입된 입자 탐지 시스템 내에서 주소지정기능을 제공하는 추가 장치의 두 실시태양을 도시한다.
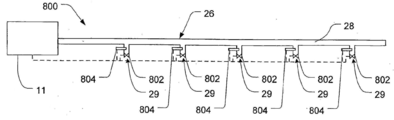
먼저, 공기 샘플링 시스템(26)에 결합된 입자 탐지기(11)를 포함하는 입자 탐지 시스템(800)을 나타내는 도 8을 참조한다. 공기 샘플링 시스템(26)은 5개의 샘플 지점(29)을 포함하는 샘플링 파이프(28)를 포함한다. 도 1과 관련하여 기술한 대로, 입자 탐지기(11)의 흡입기는 샘플 입구(29)를 통해 공기 샘플을 끌어당기고, 공기는 분석을 위해 파이프(28)를 따라 탐지지(11) 속으로 이동한다. 이 실시태양에서, 각 샘플링 구멍(29)은 밸브(802)를 추가로 포함한다. 각 밸브(802)는 개개의 샘플링 구멍(29)을 통과하는 흐름을 독립적으로 조절할 수 있다. 밸브는 탐지기(11)의 중앙 컨트롤러에 의해 제어되고 탐지기(11)의 제어하에서 개방되고 밀폐되도록 구성된다. 일부 실시태양에서 밸브(802)는 도 28과 관련하여 더욱 상세하게 기술된 방식으로 탐지기(11)로부터의 신호로서 적열 변화(glow changes )를 해석함으로써 상태를 변화시킬 필요인 감각을 수신할 수 있다.
각 샘플링 입구(29) 상의 밸브(802)의 목적은 샘플링 입구(29)의 어느 것을 통해 관심 입자가 시스템(800)에 들어갔는지를 측정하는 것을 돕기 위해 연기 탐지기(11)가 이의 시스템의 샘플링 변수 중 하나를 변화시키게 하는 것이다. 탐지기(11)에 의한 관심 입자의 최초 탐지시, 소정의 임계값 수준에서, 탐지 시스템(800)은 위치측정 과정으로 들어간다. 이 과정에서, 탐지기(11)는 밸브(29)가 샘플링 변수, 이 경우 샘플링 입구에 들어가는 공기의 유량을 변화시키게 한다. 이런 변화는 입구 하나씩 기준으로 또는 여러 입구의 그룹에서 실행될 수 있다. 유량에서 각 변화 이후, 새로운 입자 농도 측정이 이루어진다. 변화 변수와 함께 최초 입자 농도 측정 및 제 2 입자 농도 측정은 샘플 입구의 어느 것을 통해 관심 입자가 들어갔는지를 측정하는데 사용될 수 있다.
이 작업은 탐지기(11)에서 탐지된 입자 수준이 각 개별 입구(29)에서 입자 농도 및 샘플 흐름의 유량의 가중치 합이다. 샘플링 입구를 통과하는 연기 수준 또는 유량을 변화시킴으로써, 임의의 하나의 샘플 입구 또는 입구의 그룹에 들어가는 입자 수준을 측정하기 위해 연속 방정식의 세트를 푸는 것이 가능하다.
간단한 실시예를 예시하기 위해, 연기 탐지기를 포함하는 연기 탐지 시스템 및 2개의 샘플 입구를 가진 파이프를 구비한 샘플링 네트워크를 고려한다.
이 실시예에서, 모든 밸브가 개방될 때 탐지된 연기의 수준은 다음 방정식으로 제공된다:
여기서, DecterSmokeAllValvsOpen은 연기 탐지기에 의해 탐지된 전체 연기이다;
Smoke 1은 샘플링 입구 1에 들어가는 샘플에서 연기 수준이다;
flow 1은 샘플링 입구 1을 통해 들어가는 샘플의 유량이다;
Smoke 2는 샘플링 입구 2에 들어가는 샘플에서 연기 수준이다;
flow 2는 샘플링 입구 2를 통과하는 유량이다.
이제, 제 1 샘플 입구가 밸브에 의해 닫힌 경우, 탐지기에 도달하는 연기의 가중치 합은 다음이 된다:
샘플 입구 1 상의 밸브는 완전히 밀폐되었기 때문에 이 가중치 합은 flow 1 = 0인 것을 제외하고 방정식 1과 동일하다는 것을 알 것이다.
샘플 입구 1을 통해 들어간 연기의 양을 측정하기 위해, 다음과 같이 Somke 1에 대한 이런 방정식을 풀어야 하는 상황에 있다:

따라서, flow 1, flow 2 및 유량의 변화를 아는 경우, 이 방정식을 풀 수 있고 어떤 연기 수준이 샘플 입구 1에 들어갔는지를 측정할 수 있다. 이 원칙은 또한 밀폐될 때, 밸브(802)가 개별 샘플링 구멍을 통과하는 흐름을 단지 부분적으로 제한하여, 각 샘플링 입구(29)에서 유량을 측정할 수 있는 경우에도 작용한다. 유량이 탐지되게 하기 위해, 시스템(800)은 각 샘플 입구(29)에 유량 센서(804)를 포함한다. 유량 센서(804)는 당업자에게 알려지게 될 형태의 초음파 유량 센서 또는 저렴한 열 유량 센서와 같은 고 민감성 유량 센서일 수 있다.
일부 실시태양에서, 밸브(802)는 개별 샘플 입구를 통과하는 유량을 0으로 감소시키지 않고 단지 일정 비율로 감소시킬 것이다. 다음 방정식은 최종 실시예와 관련하여 기술한 대로, 밸브가 개별 샘플링 구멍을 통과하는 유량을 이전 유량의 반으로 감소시키는데 사용된 경우 2개의 구멍 시스템에서 어떻게 샘플 입구 1을 통과한 연기 수준(Somke 1)이 계산될 수 있는지를 설명한다.

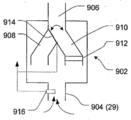
본 발명의 다른 실시태양에서, 연립 방정식을 풀기 위해 샘플 입구를 통과하는 유량을 변화시키는 대신에, 입구의 각각에 들어가는 연기 수준을 변화시킬 수 있다. 이것은 샘플 입구(29)의 각각을 통과하는 흐름 경로 속에 필터를 선택적으로 끼워넣음으로써 성취될 수 있다. 이런 시스템의 한 실시예는 도 9a 및 9b에 도시된다. 도 9a의 시스템(900)은 이 속으로 공기 샘플이 복수의 샘플 입구(29)를 통해 끌어당겨지는 샘플링 파이프(28) 포함하는 샘플링 네트워크(26)에 연결된 탐지기(11)를 포함한다. 각 샘플 입구는 도 9b에 더욱 상세하게 도시된 선택가능한 필터 장치(902)를 더 포함한다. 선택가능한 필터 장치(902)는 한 말단에 공기 샘플 입구(904)(입구(29)와 동일)를 제공하며 다른 말단에 샘플 출구(906)를 제공한다. 공기 샘플 입구(904)는 환경에 개방되어, 환경으로부터의 공기 샘플이 선택가능한 필터 장치(902) 속으로 끌어당겨지게 한다. 샘플 출구(906)는 샘플링 파이프(28)에 연결된다. 선택가능한 필터 장치(902) 내부는 2개의 흐름 통로이며, 한 통로(908)는 여과되지 않고 다른 통로(901)는 필터(912)를 포함한다. 선택가능한 필터 장치(902)는 밸브(914)를 추가로 포함한다. 밸브(914)는 여과된 흐름 통로(910)를 봉쇄하는 제 1 위치와 여과되지 않은 흐름 통로(908)를 봉쇄하는 제 2 위치 사이에서 이동가능하다. 연기가, 임계값 수준에서, 탐지기(11)에 의해 먼저 탐지되고 탐지기가 어느 샘플 입구(29)로부터 입자가 시스템에 들어갔는지를 측정하는 것을 시도하는 위치측정 모드로 들어간 후, 밸브(914)는 입구(904)를 통해 끌어당겨진 제 1 위치를 입구(904)에 들어가는 임의의 입자가 필터(912)에 의해 출구(906)로부터 빠져나오는 기류로부터 제거되는 제 2 위치로 전환된다. 한 바람직한 형태에서, 필터(912)는 기류로부터 모든 입자를 실질적으로 제거할 HEPA 필터 또는 다른 고효율 필터이다.
샘플링 지점(29) 및 이 경우에 선택가능한 필터 장치(902)는 샘플링 지점(29)에 들어가는 유량을 측정하기 위한 유량 센서를 포함한다.
선택가능한 필터 장치(902)는 시스템(900)의 기류 통로를 통해 탐지기(11)와 통신되도록 구성될 수 있다. 이와 같은 실시예에서 탐지기(11)에 의해 사용된 이런 통신 프로토콜은 신호를 보내는 것이 필요할 것이어서 각 선택가능한 필터 장치(902)는 개별적으로 주소지정될 수 있거나 각 선택가능한 필터 장치는 조화된 타이밍으로 작동하도록 프로그램될 수 있다. 예시적 통신 방법의 세부내용은 도 28과 관련하여 기술된다.
이해될 것과 같이, 제 1 실시예와 관련하여 기술된 것에 대한 방정식의 유사한 세트가 도 9a 및 9b에 예시된 형태의 시스템에 적용될 수 있다.
2개의 구멍 시스템의 경우, 위에서 논의한 대로, 모든 샘플 입구가 주입량을 여과하지 않을 때 탐지기에 도달하는 연기의 수준은 다음 방정식으로 표현될 수 있다:
여기서, DetectorSmokeAllUnfiltered는 모든 흐름이 여과되지 않을 때 탐지기에 도달한 연기의 수준이며 모든 다른 항은 방정식 1 내지 4와 관련하여 상기한 대로이다.
제 1 샘플링 구멍의 선택가능한 필터 장치가 여과 모드로 이동한 후, 탐지기에 수용된 연기의 수준을 표현하는 가중치 합은 다음과 같이 표현된다:
여기서, DetectroSmokeFiltered1은 샘플 입구(1)를 통과한 흐름이 완전히 여과될 때 탐지기에 수용된 연기의 수준이다.
이런 방정식을 동시에 풀면 다음 방정식을 제공하며, 이로부터 샘플 입구(1)에 도달하는 연기의 수준이 측정될 수 있다.

이런 형태의 위치측정 과정의 신뢰성을 변화시킬 수 있는 연기 수준을 증가 또는 감소시키도록 처리하기 위해서, 제 1 상태 및 제 2 상태에서 측정하는 순서가 반복될 수 있고 동일한 상태는 여러 사이클 동안 평균을 낼 수 있다. 예를 들어, 모든 밸브가 개방된 제 1 측정 이후에 변화된 변수를 가진 연기 수준 측정이 이어지고 다시 모든 밸브가 개방된 동일한 최초 해석이 이어진다. 두 번의 밸브 개방 측정은 평균을 낼 수 있고 이후 계산에서 사용될 수 있다.
본 시스템에 대한 추가 변화가 실행될 수 있는데, 샘플링 지점의 각각을 통과하는 흐름을 억제 또는 감소하는 대신에 흐름 임피던스를 감소시켜서 그 샘플링 지점을 통해 끌어당겨진 시스템으로부터의 전체 기류의 비율을 증가시키도록 샘플링 구멍의 크기를 증가시키기 위해 밸브를 개방하거나 알려진 양에 의해 샘플링 지점을 통과하는 흐름을 증가 또는 감소하도록 각 샘플링 지점에 팬을 설치하고 팬을 작동하거나 속도를 변화시킴으로써 샘플링 지점에서 유량이 증가한다.
상기 실시태양은 단순한 2개 입구 시스템으로 기술되었다. 그러나, 이해될 것과 같이, 도 8 및 9a에 기술된 대로, 시스템은 2개 이상의 샘플링 입구를 가질 수 있다. 이런 시스템에서 입구의 각각을 개별적으로 스캔하고 한 번에 하나의 입구에서 샘플링 변수를 변화시키는 것이 가능하다. 그러나, 입구의 전체 수의 서브세트가 각 측정 사이클에서 조절된 샘플링 변수를 갖게 그룹화된 방식으로 변화를 실행하는 것이 유익할 수 있다. 일부 경우에 각각의 기여를 측정하기 위해 다른 양만큼 모든 샘플링 입구의 샘플링 변수를 변화시킬 수 있다. 이해될 것과 같이, 시스템에 더 많은 입구가 존재하면, 방정식의 필수 세트를 풀기 위해 충분한 데이터를 수집하기 위해서 샘플링 변수를 변화시키고 입자 농도를 재측정하는 과정이 더 많이 실행될 것이 필요하다.
도 8, 9a 및 9b와 관련하여 기술된 개념은 복수의 공기 흡입 통로로부터 끌어당겨진 공기 샘플에서 오염원(들)을 탐지하고 각각에서 오염원 수준을 측정하기 위한 방법으로 더욱 일반적으로 확장될 수 있다. 예를 들어, 상기 방법은 단일 탐지기에 공급하는 복수의 공기 샘플링 파이프를 가진 샘플링 네트워크와 결합된 흡입하는 입자 탐지기에 적용될 수 있으며, 여기서 샘플링 시스템의 각 파이프 또는 가지로부터의 기여가 측정될 것이다. 도 7은 이런 형태의 '파이프 당(per pipe)' 위치측정 또는 주소지정이 사용되는 시스템을 기술한다.
도 7의 실시예에서 다중-파이프 공기 샘플링 시스템은 단일 오염원 탐지기 속에 공급될 수 있어서 어느 파이프가 기류에 오염원을 가지는 지를 측정하기 위해서, 한 번에 한 파이프의 샘플링을 필요로 한다. 이것은 파이프의 하나 외에는 모두를 밀봉하고 샘플이 한 번에 하나의 파이프로부터 탐지기에 들어가게 하면서 탐지가 오염원 수준을 측정함으로써 성취될 수 있다. 이것을 다중-파이프 공기 샘플링 네트워크에서 파이프의 각각에 대해 반복한다. 밀봉된 파이프는 개방된 파이프에서 오염원 수준의 정확한 측정을 얻기 위해 기류에 대해 완전히 밀봉되어야만 한다. 그러나, 완전한 밀봉은 낮은 또는 합리적인 가격의 밸브에서 성취하기 매우 어렵다. 그러나 도 8, 9a 및 9b와 관련하여 기술된 것과 유사한 방법을 사용함으로써 완전한 밀봉의 필요가 제거될 수 있다.
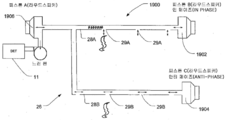
도 10a는 전체 2개의 샘플링 파이프(1012, 1014)로 이루어진 샘플링 파이프 네트워크(1011)를 가진 감지 시스템(1010)을 개략적으로 예시한다. 각각의 샘플링 파이프(1012, 1014)는 공기 흡입 통로를 형성한다. 공기 흡입 통로는 매니폴드(1016)에서 결합된다. 매니폴드(1016)는 기류를 혼합하는 것을 돕는 적절한 방지재를 포함할 수 있다. 공기는 팬(1018)의 사용을 통해 감지 시스템(1010)을 통해 끌어당겨진다. 혼합된 기류로부터의 하부 샘플은 필터(1022)와 입자 탐지기(1024)가 제공되는 탐지기 루프(1020)를 통해 끌어당겨진다. 기류가 탐지기 루프(1020)를 통과하면, 주요 기류 통로(1019)에 다시 합류한다. 유량 센서(1026)는 시스템(1010)의 출구(1028) 앞에 선택적으로 제공될 수 있다. 이해될 것과 같이 감지 시스템(1010)은 도 1의 탐지기(11)와 동일하다.
샘플링 파이프(1012, 1014)의 각각은 버터플라이 밸브 또는 다른 형태의 유량 조절기(1030, 1032)와 밸브를 가진다. 또한, 각각의 샘플링 파이프(1012, 1014)는 초음파 센서(1013 및 1015)를 포함한다.
비록 밸브(1030, 1032), 유량 센서(1013, 1015) 및 매니폴드(1016)가 샘플링 네트워크(1011)의 일부를 형성하는 것으로 예시되었으나, 이들은 감지 시스템(1010)의 하우징 내에 물리적으로 동일하게 위치될 수 있어서 본 발명의 작업을 변화시키지 않고 감지 시스템(1010)의 일부를 형성할 수 있다.
본 발명에 따른 방법은 도 10b 내지 10d와 관련하여 기술될 것이다. 정상적인 작동시에, 각각의 밸브(1030, 1032)는 도 10b에 도시된 대로 완전히 개방된다. 그러나, 입자 탐지기(1024)는 소정의 수준에서 샘플화된 기류에서 오염원의 존재를 탐지할 때, 본 발명에 따른 스캐닝 방법이 착수된다. 먼저, 제 1 샘플링 파이프(1012)는 도 10c에 도시된 대로 부분적으로 밀폐된다. 이 조건에서, 입자 탐지기(1024)는 오염원(C1)의 측정을 실행한다. 또한, 유량은 샘플링 파이프(1012, 1014)에서 측정된다(Fmp, F는 유량이며, m은 측정 번호이며 p는 파이프 번호이다). 따라서, 유량 측정은 각각 유량 센서(1013 및 1015)에 의한 F11 및 F12일 것이다.
다음 단계에서, 다른 샘플링 파이프(14)는 도 10d에 예시된 위치로 버터플라이 밸브를 이동시킴으로써 부분적으로 봉쇄된다. 이 조건에서, 입자 탐지기는 오염원 수준(C2)을 측정한다. 또한, 유량 측정이 실행된다(F21, F22).
오염원의 양(또는 파이프 사이의 오염원의 상대량)은 스캐닝 기간 동안 실질적으로 변하지 않는다고 가정하면, 파이프에 대한 개별 오염원 측정은 연립 방정식의 다음 세트로부터 계산될 수 있다:

여기서 X1은 파이프 1에서 실제 오염이며 X2는 파이프 2에서 실제 오염이다.
유리하게는, 본 발명의 실시태양은, 소정의 종류의 오염원이 고가의 정확한 밸브조절 없이 제거되도록, 샘플 파이프의 불완전한 밀봉에 의해 유발된 샘플 파이프 사이의 상호작용(cross-talk)을 가능하게 한다. 대신에, 저가 버터플라이 밸브 또는 다른 형태의 유량 조절기는 상호작용을 정확하게 제거하는데 충분하며 파이프 주소지정기능을 성취되게 한다.
상기한 대로, 파이프를 부분적으로 밀폐하기 위해 밸브를 사용하는 대신에, 필터는 파이프 속에 선택적으로 끼워져 일시적으로 공지된 양만큼 각 파이프에서 오염원 수준을 (바람직하게는 0으로) 감소시킬 수 있고 상기 방법은 구멍 주소지정을 위해 상기한 대로 오염원 수준을 해결하도록 조절될 수 있다.
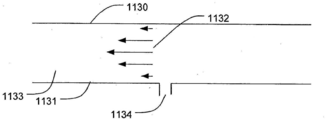
본 발명에 기술된 다양한 실시태양에서, 실행되는 공통 단계는 탐지기에서 입자의 최초 탐지이며 더욱 구체적으로 샘플링 시스템의 입자 샘플링 입구로부터 연기의 수령을 정확하게 확인하려는 시도이다. 특히, 탐지되기 위해 가장 일반적으로 추구하는 사건은 샘플링 파이프 아래로 퍼져나가는 연기 전선의 도착이며 이는 샘플 네트워크에서 작업의 변화, 예를 들어, 밸브의 개방 또는 밀폐 또는 깨끗한 유체에 의한 파이프 네트워크의 세척 또는 흐름 방향 역전 등 이후 특정 샘플 입구에 들어간 연기를 나타낸다. 도 11a 및 11b는 이런 개념을 예시한다.
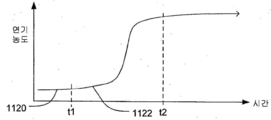
도 11a는 탐지기(1102) 및 샘플링 파이프 네트워크(1104)를 포함하는 입자 탐지 시스템(1100)을 예시한다. 샘플링 네트워크(1104)는 3개의 샘플 입구(1106, 1108 및 1110)를 가진다. 연기 줄기(1112)는 샘플링 파이프(1108) 근처에 위치한다. 샘플링 네트워크(1104)에서 흐름의 방향이 역전되고 탐지기(1102)가 샘플링 구멍(1108)으로부터 시스템에 들어가는 연기의 도착시간을 측정하는 것을 시도하는 상황을 예로 든다. 시간에 대한 측정된 연기 농도의 그래프가 도 11b에 예시된다. 먼저, 일정 기간 1020 동안, 낮은 연기 수준은 탐지기에 도착하는 샘플 유체가 샘플 입구(1106)로부터의 샘플 유체를 포함함에 따라 탐지된다. 시간(T1)에서, 연기의 증가가 탐지된다. 다음 기간 1022 동안, 입구(1108)로부터의 샘플이 도착하기 시작할 때 탐지된 연기 수준은 시간 T2까지, 대체로 정상 상태 수준이 탐지될 때 증가한다. 도 11b의 그래프에서, 증가 1022는 연기 수준의 증가 때문이 아니며, 샘플링 구멍(1108)에 들어가는 샘플의 연기 전선의 퍼짐 또는 확산 때문이다. 환경으로부터 샘플링 네트워크 속으로 입자의 출입이 균등하고 순간적인 경우, 구멍(1108)으로부터의 샘플이 탐지기(11)에 도착할 때인 T1에서, 탐지기(1102)에 의해 탐지된 연기 수준의 단계적 증가가 있을 것이다.
본 발명자들은 샘플링 시스템의 샘플 입구 중 특정한 하나를 통해 끌어당겨진 공기 샘플을 포함하는 샘플 일부의 도착을 나타내는 연기 전선의 확산에 기여하는 다양한 인자가 존재한다고 생각한다. 이들 중 중요한 것은 공기 샘플링 덕트의 단면을 가로지르는 유속 기울기의 존재라고 추측된다. 도 11c는 파이프(1104)와 같은 공기 샘플링 덕트(1130)를 통과하는 단면을 예시한다. 화살표(1132)는 덕트(1130)의 중앙 부분의 유량이 덕트의 벽 근처 유량보다 크다는 것을 나타낸다.
샘플 입구, 예를 들어, 1134를 통해 끌어당겨진 샘플이 덕트(1130)의 흐름의 빠르게 흐르는 중앙 지역 속으로 들어오는데 상당한 시간이 걸린다고 생각되며, 따라서 연기 전선은 탐지기에 도달할 때 퍼진다. 그러나 이런 매커니즘은 경쟁 인자를 갖는데, 즉 처음에 샘플은 덕트 내의 느리게 흐르는 주변 공기 속에 주입될 것이고 이는 탐지기에 도착을 지연시킬 것이다. 그러나, 시간이 지남에 따라 샘플의 일부는 빠르게 흐르는 중앙 지역 속으로 찾아갈 것이며 이는 탐지기로의 수송 시간을 최소화할 것이다.
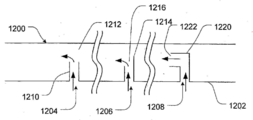
본 발명자들은 이 문제를 개선하기 위해 물리적 구조가 샘플링 네트워크의 덕트(즉, 샘플링 네트워크의 파이프)에 위치될 수 있다는 것을 제안하였다. 첫 번째 해결책 집단에서, 본 발명자들은 파이프(1130)의 벽(1131)으로부터 안쪽으로 파이프(1130)의 중앙(1133) 쪽으로 연장되어, 샘플을 샘플 흐름의 빠르게 흐르는 지역으로 전달하는 샘플 주입 입구를 제안한다. 이런 샘플 주입 입구의 3개의 예가 도 12에 도시된다.
도 12에서, 파이프(1200) 형태의 공기 샘플링 시스템의 덕트 형성 부분이 예시된다. 파이프(1200)는 벽(1202)에 의해 경계가 정해진다. 3개의 샘플 주입 입구(1204, 1206 및 1208)가 또한 예시된다. 제 1 샘플 주입 입구(1204)는 짧은 튜브(1210)이며, 측벽으로부터 파이프(1200) 속으로, 중앙(12-12) 쪽으로 연장된다. 샘플 주입 입구(1206)는 입구(1210)와 유사하나 내부 말단(1214) 상에서 모서리가 깍인 선단으로 끝맺음 된다. 선단은 출구(1216) 지점을 기능적으로 파이프 내에서 흐름에 대해 하류 방향으로 만드는 효과를 가진다.
마지막으로, 샘플 주입 입구(1208)는 역전된 L 모양 튜브(1220) 형태를 가진다. 이의 입구는 덕트(1200)의 외부에 있고 이의 출구(1222)는 하류 방향으로 향하며 덕트(1200)의 중앙과 정렬되어, 샘플 입구(1208) 속으로 끌어당겨진 샘플을 가장 빠르게 흐르는 유체 흐름에서 파이프의 중앙에 주입한다. 이런 3개의 예는 샘플 파이프를 통과하여 끌어당겨진 샘플의 퍼짐을 최소화하기 위해 파이프 내의 흐름의 빠르게 흐르는 중앙 지역을 이용한다.
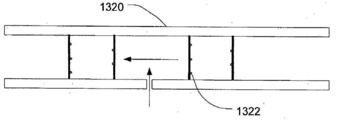
이런 주입 방법에 대한 대안은 13a 내지 13d에 예시된다. 이런 일련의 예는 샘플링 덕트 내의 층류를 막거나 분리하기 위해 샘플링 시스템의 덕트 내의 난류를 생성하여, 도 11c에 예시된 형태의 흐름 기울기를 최소화하는 구조를 사용한다. 도 13a 내지 13d 각각은 덕트(1300, 1310, 1320 및 1330)의 부분을 각각 예시한다.
도 13a에서, 덕트(1300)의 내벽(1302)은 난류기로 사용된다. 벽(1302)은 벽을 가로지르는 흐름을 분리하는 거친 표면을 생성하기 위해, 거칠어지거나 골, 선, 돌출장식 등과 같은 표면 윤곽 또는 구조가 제공되었다.
도 13b에서 난류기는 파이프의 벽(1310)으로부터 안쪽으로 연장되는 일련의 난류 형성 돌출부(1312)이며 파이프(1310) 내의 층류의 분리를 일으키는데 사용된다.
도 13c는 복수의 난류 유발 부재가 파이프(1320)의 전체 폭까지 연장된 실시예를 예시한다. 이런 실시예에서 난류기는 구멍이 있는 메시 요소(1322) 형태이다. 구멍이 있는 메시 요소(1322)는 충분하게 큰 구멍 크기를 가져서 시간이 지남에 따라 막히지 않으나 파이프(1320)에 난류가 형성되게 할 것이다. 당업자가 이해할 수 있듯이, 샘플링 덕트의 내부를 가로질러 놓인 여러 다른 형태의 난류기가 발명될 수 있다.
도 13d는 이동하는 난류 발생 요소(1332)가 파이프(1330) 내부에 놓인 다른 실시예를 예시한다. 이 경우에, 일련의 팬(1334 및 1336)은 파이프(1330)에 지지된다. 팬은 능동적으로 구동되거나 수동적으로 회전할 수 있으나 공기가 팬을 지나 흘러감에 따라 공기를 교반하거나 난류를 일으키는 역할을 할 수 있다.
이 실시예에서, 인접한 샘플링 입구인 덕트의 지역의 난류 유발 구조를 기술하는 것이 편리하나, 왜 이것이 행해져야 하며 난류 유발 구조가 샘플링 입구로부터 떨어져 위치될 수 있는지에 대한 구체적인 이유가 없다는 것을 유의해야 한다.
상기한 네 실시예에 의해 이해될 수 있듯이, 난류 유발 구조의 목적은 공기 샘플링 덕트를 가로지르는 흐름 프로파일을 분리하는 것이며 그 결과 공기의 일부가 다른 부분보다 상대적으로 더 빠르거나 느리게 이동하여 탐지기에 샘플 전선의 도착을 퍼지게 하지 않고, 샘플링 입구로부터 들어가는 공기는 샘플링 덕트를 따라 '패킷'(packet)과 같이 탐지기로 이동할 것이다.
선택적으로 또는 상기한 기술 이외에, 본 발명자들은 샘플링 네트워크 속으로 끌어당겨진 공기 샘플에 대한 희석 효과를 적어도 부분적으로 개선함으로써 복수의 샘플 입구 중 어느 샘플 입구로부터 연기가 수용되는지를 탐지하는데 추가의 개선을 확인하였다. 도 11a에 예시된 것과 같은 입자 탐지 시스템을 고려한다. 이런 시스템에서, 샘플링 파이프(1108) 속으로 끌어당겨진 공기 샘플은 샘플링 파이프(1104) 속으로 끌어당겨질 것이며, 여기서 공기 샘플은 샘플링 지점(1110)으로부터 끌어당겨진 샘플과 혼합되고 이에 의해 희석된다. 유사하게, 샘플 입구(1106)로부터 끌어당겨진 공기 샘플은 모든 상류 샘플 입구로부터 끌어당겨진 샘플에 의해 희석된다. 따라서, 공기 샘플이 탐지기(1102)에 도달할 때, 탐지된 입자의 실제 농도는 입자가 샘플링 네트워크에 들어간 특정 샘플링 입구 주위의 대기의 샘플 농도와 비교하여 크게 희석될 것이다. 본 발명자들은, 예를 들어, 샘플링 파이프 속으로 끌어당겨진 샘플의 농도를 증가시켜, 시스템이 샘플링 지점 주위의 대기의 실제 입자 농도를 더욱 엄밀하게 반영하고 및/또는 최소의 추가 희석으로 탐지기에 샘플을 전달하기 위한 장치를 제공하여 이런 문제를 개선하도록 본 발명에 기술된 시스템에 대한 어떤 변형이 실행될 수 있다는 것을 확인하였다.
도 14는 이런 기술을 실행하는 제 1 예시적 시스템(1400)을 예시한다. 시스템(1400)은 탐지기(11) 및 공기 샘플링 파이프(28)의 먼 말단(1402)에 5개의 샘플 입구(29)를 가진 샘플링 파이프(28)를 포함하는 공기 샘플링 네트워크(26)를 포함하며, 탐지기 시스템(1400)은 작동 수단(1406)에 의해 구동된 벨로우(1404) 형태의 샘플 확대 장치를 포함한다. 벨로우(1404)는 아래 기술될 방식으로 샘플링 파이프 네트워크를 따라 또는 이로부터 공기를 내보내거나 빨아들이는 기능을 실행한다. 당업자가 이해하게 될 것과 같이, 매우 다양한 시스템이 벨로우 구조를 대체하기 위해 사용될 수 있는데, 예를 들어, 반복하는 공기압 피스톤 또는 가역 팬 또는 펌프 또는 다른 유사 공기 이동 장치가 벨로우(1404) 대신에 사용될 수 있다.
시스템(1400)의 작동이 이제 기술될 것이다. 먼저, 임계값 수준의 입자가 탐지기(11)에 의해 탐지된 후, 시스템(1400)은 시스템에서 입자의 위치가 측정될 위치측정 모드에 들어간다. 이런 모드에서, 주요 공기 이동 시스템, 예를 들어, 탐지기(11)의 흡입기(16)가 정지되고 시스템은 컨트롤러가 통신 채널(1408)을 통해 벨로우(1404)의 작동 장치(1406)와 통신하는 샘플 확대 단계에 들어간다. 팬이 정지된 상태 또는 선택적으로 샘플링 네트워크(26)의 탐지기 말단에 있는 밸브가 밀폐된 상태로, 샘플링 파이프(28)는 고정된 부피의 공기를 포함하며, 사용시에 벨로우(1404)는 샘플링 파이프 네트워크(26) 내에 포함된 공기의 부피를 증가 및 감소시키는데 사용된다. 벨로우가 팽창될 때 부피가 증가하고 추가 샘플 유체가 샘플링 입구(29)의 각각 속으로 끌어당겨진다. 벨로우가 수축될 때, 샘플링 네트워크(26) 내의 공기의 일부는 샘플링 입구(29)로부터 배출된다. 샘플링 파이프 네트워크 내의 공기의 부피를 증가 및 감소시킴으로써, 공기는 샘플링 입구의 각각의 내부 및 외부로 반복적으로 들어가서 샘플링 입구(29)의 각각을 둘러싸는 샘플링 파이프(28) 내에 국소화된 샘플 부분을 형성하며, 이는 샘플링 입구(29)의 각각에 바로 인접한 환경에서 관심 입자의 수준을 연속적으로 끌어당겨지고 연속적으로 희석된 샘플 흐름에 의한 경우보다 더욱 정확하게 반영한다.
샘플링 입구(29)의 하나에서 상황을 고려하면, 샘플링 입구 속으로 끌어당겨진 공기 샘플은 샘플 파이프 네트워크에 들어가며 파이프(28) 내의 현존하는 흐름과 혼합된다. 샘플링 입구를 지나 흐르는 현존하는 공기는 모든 상류 샘플링 입구로부터 끌어당겨진 샘플에 의해 상기 샘플을 희석한다. 파이프(28)의 흐름이 파이프(28)의 탐지기 말단에서 밸브(1410)를 밀폐하거나 가능하게는 탐지기(11)의 흡입기를 정지시킴으로써 정지될 때, 벨로우(1404)는 수축되고 샘플링 지점(29)을 둘러싸는 샘플링 파이프(28) 내의 공기의 일부가 샘플링 지점(29)으로부터 배출되는데, 이는 공기가 벨로우에 의해 샘플링 파이프(29)를 따라 밀려지기 때문이다. 그러나, 각 샘플링 지점으로부터 배출된 공기는 상류 샘플링 지점으로부터의 샘플을 희석하는 단계를 포함한다. 벨로우(1404)를 팽창시킴으로써 파이프 네트워크(28)에 다시 흡입이 가해지고 추가 공기 샘플은 각 샘플링 지점 속으로 끌어당겨진다. 이 샘플은 또한 샘플링 지점에 인접한 샘플링 파이프 내에 이미 존재하는 유체에 의해 희석되는 반면, 이런 희석 공기의 일부는 관심 샘플링 지점 속으로 이미 끌어당겨진 공기 샘플이다. 따라서, 제 2 샘플링 이후 전체 농도는 제 1 샘플링과 비교하여 증가된다. 샘플링 입구를 통한 배출 및 샘플링의 반복된 사이클에 의해, 샘플링 입구를 둘러싸는 샘플의 일부에서 파이프(28) 내의 공기 부분은 증가하기 시작하며 입자 수준은 샘플링 입구를 둘러싸는 대기에서 증가하기 시작한다. 이런 방법을 사용하여, 샘플링 파이프(29) 내의 구별된 샘플 부분이 형성되며 이는 샘플링 입구를 둘러싸는 환경을 더욱 엄밀하게 나타낸다. 희석은 감소되기 때문에, 연기 수준 증가의 개시 즉 샘플링 네트워크를 따라 입자의 출입 위치를 측정하기 위한 연기 전선의 탐지에 의존하는 상기한 방법은 개선될 수 있다. 일단 샘플 확대 단계가 완료되면 시스템은 수송 단계에 들어가고 상대적으로 국소화된 샘플 패킷을 포함하는 샘플링된 공기를 분석을 위해 탐지기로 다시 이동시킨다.
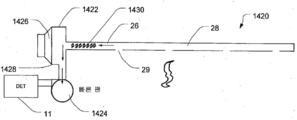
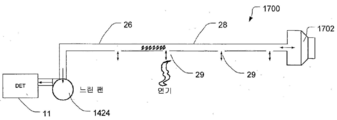
도 14a 내지 14e는 진동 부재, 예를 들어 샘플 확대를 실행하는 스피커를 사용하는 예시적 시스템을 예시한다. 시스템(1420)은 공기 샘플링 네트워크(26)에 연결된 입자 탐지기(11)를 포함한다. 공기 샘플링 네트워크(26)에 연결된 입자 탐지기(11)를 포함한다. 공기 샘플링 네트워크(26)는 복수의 공기 샘플 입구(29)를 가진 샘플링 파이프(28)를 포함한다. 공기 샘플링 네트워크는 샘플 확대 장치(1422)와 흡입기(1424)를 통해 탐지기에 연결된다. 흡입기(1424)는 이하에서 더욱 상세하게 기술될 방식으로 샘플링 네트워크 속으로 샘플을 끌어당겨 분석을 위해 이를 탐지기(11)로 보내도록 작동한다. 샘플 확대 장치(1422)는 각 샘플 입구(29)를 둘러싸는 지역의 공기와 샘플링 파이프(28)의 공기의 혼합을 촉진하기 위해 공기 샘플 시스템에서 흐름 방향의 진동을 일으킨다는 점에서 도 14의 벨로우와 비슷한 작업을 실행한다. 이런 실시예에서 샘플 확대 장치(1422)는 하우징(1428) 내에 장착되고 흡입기에 의해 반복 운동으로 앞뒤로 이동하는 막(1426)을 포함한다. 흡입기 및 막에 확성기가 제공될 수 있다. 바람직하게는 막은 초음파 주파수, 가장 바람직하게는 2 내지 10Hz에서 진동하도록 제조된다.
정상 작동시에 흡입기(1424)는 샘플 수송 시간 조건을 충족하는데 충분한 제 1 속도 설정으로 작동하여 공기 샘플을 탐지기(11)로 끌어당긴다. 일단 입자가 샘플 흐름에서 탐지되면, 시스템(1420)은 샘플 확대 단계를 시작하면서 위치측정 모드에 들어간다. 도 14a에 예시된 이 단계에서, 팬은 저속 작동에 들어가고 샘플 확대 장치(1422)가 작동된다. 막(1426)은 진동하여 파이프(28)의 공기를 교반시켜 각 샘플 입구(29)에 대한 입구 근처 공기와 혼합을 일으킨다. 팬은 저속으로 작동하기 때문에, 샘플링 네트워크를 둘러싸는 공기의 실제 입자 농도에 더욱 엄밀하게 필적하는 혼합된 공기 샘플이 각 샘플링 입구(29)에 들어가며 각 입구의 공기 하류의 패킷을 천천히 형성한다. 도 14b 및 14d에서, 팬(1424)이 느리게 작동하여 샘플 패킷(1430)을 형성할 때까지 교반은 지속된다.
다음으로 도 14e에서, 시스템(10)은 수송 단계에 들어간다. 이 모드에서 팬(1424)은 속도를 증가시키고 막(1426)이 정지된다. 샘플 패킷, 예를 들어, 1430은 탐지기(12)로 다시 끌어당겨지면서 팬은 빠른 모드로 작동한다. 하기한 대로, 다양한 기술(예를 들어, 샘플링 입구 봉쇄, 파이프 말단 개방 등)이 샘플 패킷의 혼합 또는 퍼짐을 최소화하도록 사용될 수 있어서 적용된 위치측정 기술의 신뢰성을 증가시킨다. 도 15는 도 14와 관련하여 기술된 것과 유사한 방법을 실행하는 시스템(1500)의 제 2 실시태양을 예시한다.
도 15에서 유사한 형태는 도 14 및 이전 실시태양에 대해 유사하게 번호를 지정하였고 간편하도록 재설명되지 않을 것이다. 이 실시예에서, 샘플링 네트워크(26)는 이의 말단(1520)에 팬(1504) 및 밸브(1506)를 포함한다. 선택적으로 탐지기(11)에 가장 근접한 샘플링 파이프(28)의 말단(1508)에, 추가로 제 2 밸브(1510)가 존재할 수 있다. 이 실시예에서, 밸브(1506)는 정상적으로 밀폐되면서 밸브(1510)는 탐지기(11)의 정상 작동 동안 개방된다. 그러나 일단 탐지기가 위치측정 모드에 들어가면, 밸브(1510 및 1506)의 위치는 변하며 밸브(1510)는 밀폐되고 밸브(1506)은 개방된다. 팬(1504)은 도 14의 벨로우(1404)와 동일한 기능을 실행하도록 사용된다. 이와 관련하여 팬(1504)은 샘플링 지점(29)으로부터 샘플링 파이프(28)의 내용물의 일부를 내보내거나 상기한 대로 샘플링 지점(29)을 통해 샘플을 빨아당기는데 사용된다. 이해될 것과 같이, 샘플의 빨아당김 및 내보냄 사이의 이런 진동은 입자 탐지기(11)의 주요 흡입기에 의해 실행될 수 있다. 그러나, 샘플링 파이프 네트워크(28)의 먼 말단에 팬(1504)을 설치함으로써 추가 장점이 얻어질 수 있는데, 즉 공기 샘플을 샘플링 파이프(28) 아래로 흡입하기 위해 탐지기(11)의 흡입기를 사용하는 대신, 팬(1504)이 이 과정의 종료시에 샘플링 파이프(126)의 내용물을 탐지기(11)로 내보내는데 사용될 수 있다. 파이프(28)의 말단에 송풍 팬(1504)을 사용하는 장점은 샘플링 파이프(28)가 양으로 압축되어서 수송 단계 동안 샘플링 지점(29)을 둘러싸는 환경으로부터 어떠한 추가 공기 샘플을 끌어당기지 않는다는 것이다. 이런 방식으로, 각 샘플링 입구(29)에 해당하는 샘플 공기의 패킷/부분을 포함하는 샘플링 공기의 상대적으로 희석되지 않은 기둥이 탐지기(11)에 전달되어 진동 과정에 의해 형성된 샘플의 '패킷'은 탐지기(11)에 의해 분명하게 탐지될 수 있다. 추가로 이해될 것과 같이, 샘플 확대 동안 샘플의 빨아당김 및 내보냄 사이의 진동은 협력하여 작동하는 입자 탐지기(11)의 주요 흡입기 및 팬(1504)을 사용함으로써 실행될 수 있다. 예를 들어, 두 팬은 동시에 작동하도록 설정될 수 있는데, 즉 개별 샘플링 구멍 근처의 샘플들의 국소화된 혼합물을 강화하도록 한 방향으로 공기를 이동시킨 후 다른 방향으로 공기를 이동시키도록 설정될 수 있고 또는 선택적으로 팬은 한 방향으로 파이프를 따라 샘플 유체를 끌어당기도록 파이프(26)의 개개의 말단에 교대로 흡인을 제공하도록 설정될 수 있다. 따라서 파이프(26)의 한 말단으로부터 샘플 흐름에 벨로우-유사 푸시(push)/풀(pull)을 사용하기보다, 파이프의 두 말단으로부터 교대하는 풀/푸시 장치가 사용된다. 논-풀링 말단에서 밸브는 밀폐(또는 부분적으로 밀폐)되어 파이프(26)의 말단에 들어가는 샘플 흐름의 양을 조절할 수 있다. 유리하게는 이 장치는 시스템이 벨로우 작용의 집중 작용을 증가시키게 한다. 이 장치는 또한 샘플 입구 위치의 상류 및 하류 모두 상에 샘플 패킷이 형성되게 한다. 증가된 집중 효과는 또한 시스템이 한 말단에서 작용하는 시스템과 비교하여, 임의의 소정의 농도 증가 또는 혼합 증가에 대한 흐름 진동 사이클의 회수를 감소시키는 것을 가능하게 한다. 이런 체계는 탐지기에 더 가까운 화재는 더 높은 슬러그(slug) 농도를 갖게 되는 효과를 균등(및 가능하게는 상쇄)할 수 있다. 도 18 및 19와 관련하여 아래 기술될 것과 같이, 유리하게는 더블 엔디드(double ended) 흐름 조절이 샘플 확대를 선택적으로 실행하도록 사용될 수 있다.
도 15의 시스템은 도 15b에 예시된 대로 추가로 변형될 수 있다. 이 실시예에서 입자 탐지 시스템(1350)은 도 15의 공기 샘플링 시스템과 유사한 공기 샘플링 시스템을 포함하며 유사한 형태는 유사하게 번호를 지정하였다. 그러나 이 시스템(1520)은 추가의 작동 모드를 가능하게 하는 2개의 가지 파이프(1522 및 1524)를 추가로 포함한다. 제 1 가지(1522)는 파이프 네트워크의 하류 말단, 이상적으로는 탐지기(11)에 대한 출입구 및 가장 가까운 샘플링 지점(29) 사이에 위치한다. 상기 가지 파이프(1522)는 다음을 포함한다:
샘플링 시스템을 기술될 방식으로 정화하도록 사용될 수 있는 팬(1526).
팬(1526)에 의해 전달된 정화 공기를 세정하는데 사용되는 특히 HEPA 필터 등일 수 있는 필터(1528).
필요에 따라 가지(1522)를 선택적으로 개방하고 밀폐하기 위한 밸브(1530).
제 2 가지 파이프(1524)는 밸브(1532)를 포함하며 이하에서 논의될 것과 같이, 정화 동안 샘플링 파이프(28)로부터의 배기관으로서 사용된다.
시스템(1520)은 탐지 모드에서 도 15의 시스템(1500)과 동일한 방식으로 작동하는데, 즉 탐지기(11)의 주요 흡입기는 분석을 위해 샘플링 파이프(28)를 따라 샘플링 입구(29)를 통해 공기 샘플을 탐지기(11)로 끌어당기는 작용을 한다. 탐지 모드에서, 밸브(1530, 1532 및 1502)는 밀폐되어 샘플링 입구(29)와 관련이 없는 공기가 시스템 속으로 끌어당겨지고 공기 샘플을 희석하는 것을 막는다. 밸브(1510)는 개방된다.
일단 입자들이 충분한 정도로 탐지되면, 시스템(1520)은 위치측정 모드로 들어가고 다음 단계가 일어난다:
밸브(1510)는 밀폐되고 주요 탐지기(11)의 팬은 공기를 샘플링 파이프(28) 아래로 끌어당기는 것을 멈춘다.
밸브(1530 및 1532)(및 가능하게는 또한 1502)는 개방되어 샘플링 파이프(28)로부터의 공기 샘플의 정화를 가능하게 한다.
팬(1526)이 작동하며 공기는 가지(1522) 속으로 끌어당겨지고 공기가 세정되는 필터(1528)를 통해 샘플링 파이프(28) 속으로 끌어당겨진다. 이런 깨끗한 공기가 입자가 가득 찬 공기의 파이프(28)를 정화하고 이를 깨끗한 공기로 대체한다.
밸브(1530, 1532 및 1502)가 밀폐되고 밸브(1510)가 개방되며 주요 탐지기( 11)의 팬은 새로운 공기 샘플을 샘플링 입구(29) 속으로 끌어당기는데 사용된다. 이 과정은 단지 예를 들어 5 내지 20초의 짧은 기간 동안 작동하거나 인접 샘플링 입구(29) 속으로 끌어당겨진 공기 샘플의 혼합을 피하기 위해 가능한 한 오랫동안 작동한다. 이런 방식으로 입자가 가득 찬 공기의 패킷이 파이프(28)에 커진다. 이해될 것과 같이 이 단계는 본 발명에 기술된 다양한 집중 기술 중 하나를 실행함으로써 강화될 수 있으나, 이 실시태양에서 충분한 민감성은 이렇게 증가된 복잡함 없이 성취될 수 있다. 상기한 대로, 푸셔 팬(1504)을 사용하면 샘플링 공기의 비교적 희석되지 않은 컬럼을 탐지기(11)로 전달하는 것을 도우며, 일부 실시태양에서 확대 단계에 대한 필요를 제거할 수 있다.
그런 후에 탐지기는 주요 탐지기(11)의 흡입기가 비활성화되는 수송 단계로 이동하며 밸브(1502)는 개방된다. 밸브(1510)는 개방된 상태로 유지된다.
푸셔 팬(1504)은 활성화되고 샘플 공기의 패킷은 분석을 위해 파이프(28) 아래로 밀려간다.
그런 후에 공기 샘플이 분석되고 입자 대 부피의 존재(또는 다른 기술)는 어느 입구(29)를 통해, 입자가 시스템에 들어갔는지를 결정하는데 사용된다. 이 실시예에서, 위치측정 단계에서 샘플 공기의 분석은 제 2 입자 탐지기(1534)에 의해 실행된다. 이 탐지기는 탐지기(11)의 반응과 비교하여 비교적 빠른 반응을 가진다.
이 탐지기(1534)는 산출량에서 탐지기(11)기 만큼 민감하거나 안정하지 않을 수 있으나 위치측정 과정이 실행됨에 따라, 탐지 속도가 민감성 또는 정확성에 비해 우선시될 수 있기 때문에 입자 수준은 (예를 들어, 화재 작용의 증가 때문에) 증가될 수 있다. 또한 실제 입자 농도 데이터는 공기 샘플이 연속으로 두 탐지기를 통과할 수 있기 때문에 주요입자 탐지기(11)에 의해 얻어질 수 있다.
주요 탐지기(11) 및 고속 탐지기(1534)는 동일한 입자 탐지기의 일부일 수 있거나(예를 들어, 단일 장치에서 2개의 입자 탐지 챔버) 예를 들어, 연속으로 위치한 다른 장치일 수 있다. 또한 주요 탐지기(11)는 단독으로 사용될 수 있다. 이 경우 주요 탐지기는 선택적으로 고속 모드로 작동하도록 구성될 수 있으며 고속 모드에서 주요 탐지기는 정상적인 탐지 모드와 비교하여 개선된 반응 속도를 가진다. 이것은 탐지기의 소프트웨어 변수를 일시적으로 변화시킴으로써, 예를 들어, 입자 농도 수준이 평균되는 동안의 기간을 감소시킴으로써 또는 탐지 챔버 산출량 데이터(또는 유사물)를 수신하며 반응 속도에 대해 최적화된 제 2 데이터 프로세싱 경로를 활성화함으로써 성취될 수 있다.
상기한 것으로부터 명백하게 될 것과 같이, 가지(1522 및 1524) 및 이들의 개별 구성요소 및 빠른 반응 탐지기(1534)는 도 15의 시스템(1500)에 대한 선택적 부가물이다. 상기 방법을 실행하기 위해서 도 15의 시스템 넘어 그리고 위에 실제로 필요한 모든 것은 정화 공기를 파이프 네트워크(26)에 전달하기 위한 장치 및 정화 모드에 들어가고 나오기 위해 시스템의 밸브를 제어하기 위한 장치이다.
도 16은 탐지기로의 최종의, 증가된 농도의 공기 샘플의 전달의 감소된 희석을 위한 진동 방법 및 장치를 실행하는 시스템의 추가 실시예를 도시한다. 시스템(1600)은 도 14 및 15와 관련하여 기술한 대로, 탐지기(11) 및 샘플링 파이프 네트워크(26)를 포함하며 유사한 형태는 동일한 도면번호를 지정하였다. 이 실시예에서, 샘플의 빨아당김 및 내보냄 사이의 진동 과정은 탐지기(11)의 주요 흡입기에 의해 실행된다. 샘플링 네트워크(26)에 최종 샘플링 입구(29)의 상류에 위치된 밸브(1602)가 추가로 제공된다. 상기한 대로, 탐지기(11)의 주요 흡입기를 사용하여 샘플 농도가 증가한 후, 통신 채널(1604)에 의해 탐지기(11)의 컨트롤러에 연결된 밸브(1602)가 개방된다. 밸브(1602)는 샘플링 네트워크의 말단을 대기쪽으로 개방하도록 구성되어 샘플링 입구(29) 중 임의의 것보다 실질적으로 적은 흐름 임피던스를 가진 개방 파이프와 유사하게 된다. 그런 후에 탐지기(11)의 흡입기가 샘플링 네트워크(26)에 흡입력을 가할 때, 당겨지는 공기는 우선적으로 샘플링 파이프(28)의 말단 속으로 끌어당겨지고 이미 파이프(28) 내에 있는 동일한 패킷은 탐지기(11)를 따라 끌어당겨진다. 개방 파이프 말단은 낮은 흐름 임피던스를 갖기 때문에, 샘플링 입구(29)의 각각 속으로 끌어당겨진 공기의 수준은 크게 감소하여, 탐지기(11)에 전달됨에 따라 샘플의 희석을 크기 감소시킨다. 밸브(1602)가 개방될 때, 공기가 샘플링 입구(29) 속으로 끌어당겨지는 감소된 경향은 또한 다른 샘플링 구멍의 위치 또는 근처에서 연기에 의한 샘플 패킷의 변형을 감소시킬 것이다. 밸브(1602)가 개방될 때 샘플링 구멍(29) 속으로 감소된 흐름은 연기 출처 위치의 계산이 샘플링 구멍에서 흐름에 덜 의존적이게 할 것이다. 상기한 대로, 시스템은 일단 위치측정 단계에 들어가면 얼마나 많은 공기가 샘플링 네트워크를 통해 끌어당겨지는 지를 기초로 어느 구멍으로부터 샘플 패킷이 도달하는지를 먼저 측정하도록 훈련된다. 그러나, 샘플링 구멍은 시간에 따라 다양한 방식으로 봉쇄될 수 있기 때문에 최초 훈련을 기초로 한 부피 또는 시긴 측정의 신뢰성은 시간에 따라 변할 수 있다. 밸브(1602)를 개방함으로써 샘플 입구(29)는 샘플링 파이프(28)에서 흐름에 덜 영향을 받게 되어 결과적으로 시스템 수명 동안 샘플링 입구(29)의 차등 봉쇄의 효과는 감소될 것이다. 최종적으로 밸브(1602)를 개방하는 것은 흐름 임피던스를 감소시키고 수송 단계를 더 빠르게 하는데, 예를 들어, 파이프의 말단이 밀폐된 상태로 110 sec가 아닌 50L/min에서 100m 파이프의 경우 40sec.
일부 실시태양에서 최종 샘플링 입구(29) 이외의 샘플링 네트워크(28)의 밸브(1602)에 공기가 통과하여 끌어당겨지는 필터, 예를 들어, HEPA 필터가 제공될 수 있다. 이것은 최종 샘플링 입구(29)로부터의 샘플 패킷이 입자 또는 심지어 먼지를 포함할 수 있는 파이프의 말단 속으로 끌어당겨지는 공기로부터 두드러져 보이는 데 도움을 준다. 이런 HEPA 필터는 또한 시스템의 밸브(1602) 및 팬의 적절한 작업에 의해 도 15b와 관련하여 기술된 것과 유사한 정화 단계를 실행하기 위해 푸셔 팬과 함께 사용될 수 있다.
본 발명에 제공된 실시예에서 이해될 것과 같이, 밸브는 파이프의 말단에 가해진 흐름 제어 장치(예를 들어, 벨로우, 팬, 밸브 및 동일한 구조)의 작용을 더 촉진하기 위해 샘플링 입구(29)의 각각에 추가로 제공될 수 있다. 예를 들어, 샘플링 입구(29)의 각각에 성능을 최적화하도록 파이프 말단 흐름 제어 시스템과 협력하여 조절되는 밸브가 제공될 수 있다.
도 20a 및 20b는 본 발명의 두 실시태양을 예시하며, 위에서 예시한 실시태양의 일부와 비교하여 특히 편리한 셋업을 제공할 수 있다. 이런 실시태양은 각각 도 14 및 15의 시스템과 동일한 방식으로 사용될 수 있으며 유사한 형태는 유사한 번호를 지정하였다.
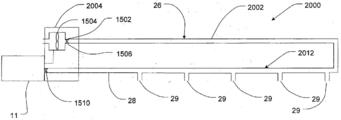
도 20a의 시스템은 공기 샘플링 파이프(28)에 샘플링 파이프 부분(2012)의 상류 말단에 연결된 리턴 부분(2002)이 제공된다는 점에서 도 14의 실시태양과 다르다. 이것이 샘플링 네트워크(26)의 먼 말단(1402)이 탐지기(11)에 가까운 위치로 돌아오게 한다. 이 실시예에서, 밸브(1510)와 함께 벨로우(1404) 및 이의 관련 작동 수단(1406)이 공통 모듈(2004)에 함께 장착된다. 가장 바람직하게는 모듈은 탐지기(11)에 기계적으로 그리고 전기적으로 연결될 수 있다. 유사한 방식으로, 도 20b의 시스템(2000)은 공기 샘플링 파이프(28)에 샘플링 파이프 부분(2012)의 상류 말단에 연결된 리턴 파이프 부분(2002)이 제공된다는 점에서 도 15의 실시태양과 다르다. 따라서 샘플링 네트워크(26)의 먼 말단(1502)은 탐지기(11)의 근처에 위치하여 팬(1504)과 밸브(1506 및 1510)는 공통 모듈(2004)에 함께 장착될 수 있다.
위치측정 모듈(예를 들어, 모듈(2004)은 통상적인 방식으로 본 발명에 기술된 본 발명의 임의의 실시태양을 실행하는데 사용될 수 있다. 이런 모듈은 원래 위치측정을 실행하도록 의도되지 않은 탐지 시스템으로 새롭게 개선될 수 있거나 부가 모듈로서 제공될 수 있어서 새로운 장비의 구입은 이런 특징을 가진 탐지기를 구매할지안할지에 대한 선택사항으로 제공될 수 있다. 예를 들어, 다음 장비를 수용함으로써 도 15b의 시스템을 실행하는 모듈이 제공될 수 있다:
밸브(1532)를 구비한 가지(1524),
밸브(1506) 및 푸셔 팬(1504)
밸브(1510)와 함께 팬(1526, 1528) 및 밸브(1530)를 구비한 가지(1522).
유사하게 밸브(1602) 및 가능하게는 HEPA 필터는 유사한 모듈에 수용될 수 있다.
이런 실시태양은 파이프 네트워크가 탐지기(11)의 근처로 둥글게 감아 되돌아가게 하는데 추가 길이의 파이프를 필요로 하는 반면, 이들은 샘플링 파이프 네트워크(26)의 상류 말단(1402/1502)에 장착된 시스템의 구성요소에 전원을 공급하고 제어하기 위해 전원 및 전기 통신 라인이 탐지기(11)로부터 먼 거리까지 이어질 필요가 없다. 이것이 시스템 설치를 더욱 수월하게 하는 것을 도울 수 있다. 또한 이는 가장 복잡한 구성요소가 이제 단일 위치에 위치하기 때문에 커미셔닝과 테스팅을 수월하게 한다.
도 8, 9a 및 9b, 14 내지 20b에 예시된 다양한 실시태양에서, 기술된 시스템의 다양한 구성요소는 예시된 입자 탐지 시스템의 탐지기(11) 또는 다른 제어 구성요소와 통신하는 것이 필요하다. 상기한 실시태양에서 통신은 주로 하드 와이어 통산 채널 또는 선택적으로 무선(예를 들어, 라디오) 통신 채널, 예를 들어 통신 링크(도 14의 1408)를 통해 일어난다. 본 발명자들은 하드 와이어 통산 경로는 제공될 필요가 없으나 탐지 시스템을 통과하는 기류 통로는 시스템의 탐지기 또는 제어 물체 및 다른 구성요소 또는 보조장치 사이의 통신을 위해 사용될 수 있다는 것을 인식하였다.
대부분의 실시태양에서, 보조장치는 본 발명에 기술된 위치측정 기술을 실행하는 것을 돕는 시스템의 밸브, 팬, 필터 또는 다른 요소와 같은 유량 제어 장치를 포함할 것이며 예를 들어 보조장치는 도 15의 실시예에 사용된 것과 같이 밸브(1502) 및/또는 팬(1504)을 포함할 수 있다. 밸브 형태의 예시적 보조장치의 세부내용은 도 28에 예시된다.
보조장치(2800)는 샘플링 파이프(28)의 일부에 장착되고 샘플링 파이프(28) 내에 포함된 기류 통로(2802)에 접근한다. 보조장치(2800)는 기류 통로(2802)에서 상태, 예를 들어, 유속, 방향 및/또는 압력을 감지하는데 사용된 하나 이상의 센서(2804)를 포함한다. 센서(2804)는 컨트롤러(2806)에 연결되고 감지된 상태를 표시하는 출력 신호를 컨트롤러에 보낸다. 컨트롤러(2806)는 센서 신호를 수신하여 소유하고, 필요에 따라 보조장치의 작동을 제어한다.
본 실시예에서 보조장치(2800)는 컨트롤러(2806)의 제어하에서 선택적으로 개방되고 밀폐될 수 있는 밸브(2808)를 포함한다. 보조장치(2800)는 바람직하게는 (비록 이것은 가능하나) 하드 와이어 전력 연결에 의하기 보다는 배터리(2810)에 의해 전원이 공급되어 보조장치에 대한 와이어링 및 설치 요건을 최소화한다.
사용시에, 센서(2804)는 공기 샘플 파이프(28)에서 기류의 변화를 수신하고 탐지함으로써 주요 입자 탐지기의 현재 상태를 감지하기 위해 보조장치(2800)에 의해 사용된다. 컨트롤러(2806)는 탐지 시스템으로부터 통산으로서 기류(2802)의 변화를 해석하여 반응하여 본 발명을 위해 어떤 작용이 취해져야 하는지를 결정한다. 예를 들어, 본 발명에 기술된 위치측정 기술에서, 위치측정 단계는 탐지기(11)의 주요 흡입기의 방향을 일시적으로 닫고, 늦추고 또는 변화시킴으로써 또는 시스템의 탐지기 말단에 있는 하나 이상의 밸브의 상태를 변화시킴으로써 시작될 수 있다. 이것이 샘플링 파이프(28)의 기류(2802)를 변화시킨다. 기류의 변화는 파이프(28)에서 변하는 기류 속도 및 압력으로서 센서(2804)에 의해 감지된다. 변화는 컨트롤러(2806)에 의해 탐지기(11)로부터의 제어 신호로 해석되어 흐름 패턴의 감지된 변화에 반응하여 적절한 제어 단계가 진행된다. 예를 들어, 기류(2802)의 중지를 탐지하는 것은 탐지 시스템이 위치측정 모드에 들어갔고 밸브(2808)는 개방되어야 한다는 신호를 컨트롤러(2806)에 보낼 수 있다. 선택적으로, 더욱 복잡한 작업이 기류 통로(2802)를 통과하는 제어 신호의 탐지시에 실행될 수 있다. 예를 들어, 보조장치(2800)가 시스템이 위치측정 모드에 들어갔는지를 감지할 때, 보조장치는 위치측정 순서가 실행되는 위치측정 모드에 들어간다. 이것은 보조장치가 제 1 기간 동안 제 1 상태에서 작동하고 제 2 시간 동안 제 2 상태에서 작동하는 것 등등을 필요로 할 수 있다. 더욱 실제적인 실시예를 제공하기 위해서, 밸브(2808)는 소정의 기간, 예를 들어 1분 동안 밀폐되도록 제어될 수 있는 반면 입자 탐지 시스템의 다른 요소는 샘플 확대 순서를 실행한다. 소정의 시간이 지난 후에, 컨트롤러는 탐지기가 위치측정의 "수송 단계"에서 작동하도록 하기 위해 밸브(2808)를 개방시킬 수 있어서 농축 샘플 "패킷"을 분석을 위해 다시 탐지기(11)로 전달시킨다.
이해될 수 있듯이, 위치측정 과정이 샘플 확대를 실행하도록 흐름에서 진동을 포함하는 경우, 센서(2804)는 진동을 감지할 수 있고 컨트롤러는 이에 반응하여 밸브 또는 이와 동일한 종류의 것의 다른 흐름 제어 구조가 적절한 작업 상태로 설정되는 것을 확실히 한다.
기류의 일시적 변화 패턴은 분석장치를 위한 제어 메세지를 암호화하거나 독립적 제어를 필요로 하는 여러 보조장치(예를 들어, 도 8 및 9a의 밸브(802, 902))를 구비한 시스템에서 특정 보조장치의 위치지정을 허용하도록 탐지 시스템에 의해 생성될 수 있다.
이런 작동 원리는 소리 펄스 또는 기타의 인가에 의하는 것과 같이 다른 방식으로 통신하기 위해 탐지기 시스템의 공기 샘플링 시스템(26) 내의 기류 통로를 사용하는 것으로 확장될 필요가 있다. 분명한 것은 이런 실시태양에서 적절한 음향 변환기 형태의 센서는 이런 통신 신호를 감지하기 위해 보조장치에 필요할 수 있다.
도 29는 입자 탐지기(11), 위치측정 모듈(2004) 및 샘플링 파이프 네트워크(26)를 포함하는 입자 탐지 시스템(2900) 및 도 28과 관련하여 기술된 것과 유사한 보조장치(2902)를 예시한다. 샘플링 파이프 네트워크(26)는 길이를 따라 이격된 일련의 샘플링 입구(29)를 가진 샘플링 파이프(28)를 포함한다. 위치측정 모듈(2004)은 위치측정 과정에서 샘플 확대 장치로서 작용하는 왕복운동 피스톤(2904)을 포함한다.
이 실시예에서 보조장치(2900)는 시스템의 상태를 나타내는 샘플링 파이프(28)에서 신호를 탐지하는 보조장치 센서(유량 센서 및 압력 센서, 도시되지 않음)에 반응하여 보조장치의 컨트롤러에 의해 제어되는 팬(2908) 및 밸브(2910)를 포함한다.
보통의 탐지 모드에서 보조장치는 밸브(2910)를 밀폐하고 있어서 샘플은 샘플 입구(29)를 통해 끌어당겨진다. 탐지기(11)가 소정의 수준에서 입자를 탐지할 때 탐지기는 위치측정 모드에 들어간다. 이것은 먼저 주요 흡입기가 역전되고 공기가 샘플링 파이프(28)로부터 내보내지는 정화 단계를 필요로 한다. 이것은 (이미 약간 음으로 압축된) 샘플링 파이프에서 압력 증가를 유발한다. 보조장치(2900)의 센서는 이를 탐지하고 보조장치의 컨트롤러에 의해 위치측정 모드가 성취되었다는 신호로서 해석된다. 컨트롤러가 밸브를 개방하고 공기가 샘플 입구를 통해 정화되는 대신에 파이프(28)의 말단을 통해 대기로 정화되게 한다.
이런 흐름이 중지될 때 파이프 압력 및 유량의 감소가 보조장치(2900)의 센서에 의해 탐지되며 프로세서는 이를 밸브(2910)를 닫는 신호로서 해석한다.
다음으로 위치측정 모드(2004)는 상기한 방식으로 샘플링 파이프에서 샘플 흐름을 진동시키기 위해 피스톤을 사용함으로써 샘플 확대를 실행한다. 보조장치(2900)의 센서는 유량 및/또는 압력에서 진동을 탐지하고 프로세서는 이를 밸브(2910)를 밀폐된 위치로 유지하는 신호로서 해석하면서 샘플 확대가 일어난다.
진동 단계의 중단을 탐지하지마자, 보조장치(2900)는 이를 수송 단계가 시작되었다는 지시로서 해석하고 밸브(2910)를 개방하고 푸셔 팬(2908)을 활성화시켜 분석을 위해 샘플을 탐지기(11)로 밀어내다.
수송 단계는 보조장치(2900)가 탐지기 또는 위치측정 모드에 의해 유발된 유량 변화를 감지하자마자 정지된다. 예를 들어, 탐지기(11)의 주요 흡입기는 일시적으로 정지되고, 느려지고 또는 역전되고, 밸브를 밀폐하여 수송 단계의 종료를 보조장치(2900)에 신호를 전달하는 압력 변화를 일으킬 수 있다. 이것과 같은 푸셔 팬(2908)을 가진 실시태양에서, 수송 단계는 푸셔 팬을 작동하는 것이 기류 통로를 통해 탐지기로부터 신호를 수신하는 것을 신뢰할 수 없게 만드는 경우 소정의 시간 동안 실행될 수 있다.
수송 단계의 종료시에 보조장치는 밸브(2910)를 밀폐하고 정상 탐지 작업으로 되돌아간다.
도 21은 도 20a 및 20b의 실시태양과 유사한 실시태양에 제공된 한 쌍의 나란한 파이프 부분의 존재에 영향을 미치는 본 발명의 한 양태의 다른 실시태양을 예시한다. 입자 탐지 시스템(2100)은 도 20 및 20a의 시스템과 유사하나, 파이프 네트워크(26)를 따라가는 샘플 입구의 위치선정은 위치측정의 과정을 돕도록 조절되었다. 이와 관련하여 본 발명에 기술된 위치측정 기술의 실질적인 실행의 어려움 중 하나는 이웃 주소를 분석하는 능력의 어려움인데, 즉 샘플이 입구가 샘플링 파이프와 너무 가깝게 접촉하는 경우, 언제 하나의 샘플링 입구로부터의 공기 샘플이 끝나고 다음 샘플 입구로부터의 공기 샘플이 시작되는지를 탐지하는 것이 매우 어려울 것이다. 본 실시태양 및 도 22와 23의 실시태양에서, 샘플을 분석하는 능력은 샘플링 지점을 따라 샘플링 입구의 위치를 배열함으로써 강화되었고 샘플링 입구는 최소 간격보다 멀게 이격된다. 이제 입자 탐지기(11), 위치측정 모듈(2004) 및 샘플링 파이프 네트워크(26)를 포함하는 입자 탐지 시스템(2100)을 예시하는 도 21을 참조한다. 샘플링 파이프 네트워크는 길이를 따라 이격된 일련의 샘플링 입구(29)를 가진 샘플링 파이프(28)를 포함한다. 도 20a 및 20b와 유사하게, 샘플링 파이프는 루프 장치이거나 다음 유사한 통로를 따라가는 2개의 파이프 부분, 예를 들어, 평행하게 이어지거나 나란히 배열된 2개의 파이프(28A 및 28B)를 가진다. 그러나, 도 20a 및 20b의 실시태양과 반대로 시스템(2100)의 샘플링 입구(29)는 두 파이프 부분(28A 및 28B)을 따라 이격되어, 상류 파이프(28B)는 파이프 입자 부분(28A)의 상류 말단의 위치측정 모듈(2004)에 대한 연결을 간단히 허용하지 않는다. 대신에, 샘플링 입구(29)의 일부는 상류 파이프 부분(28B)을 따라 위치되며 다른 것은 하류 파이프 부분(28A) 상에 위치된다. 이것은 샘플링 파이프(28)가 이웃 지역(R1 내지 R8)을 가로지르기 때문에 상류 파이프 부분(28B)을 따라 위치된 샘플링 지점(29)을 하류 파이프 부분(28A)에 위치된 샘플링 지점(29)과 번갈아 포갬으로써 샘플링 입구들 사이의 간격을 증가시킨다. 이해될 것과 같이, 일부 실시태양에서 샘플링 파이프(28)는 관찰되는 지역 R1 내지 R8을 통해 연장되며 샘플링 입구는 샘플링 파이프에 직접 연결될 수 있거나 심지어 파이프 벽에 직접 형성된 구멍일 수 있으나, 샘플링 파이프(28)는 상기 지역에 서비스를 제공하기 위해 지역 R1 내지 R8을 실제로 통과할 필요가 없다. 사실 여러 장치에서 샘플링 파이프는 상기 지역 옆에 그러나 이의 바로 외부, 예를 들어, 관찰되는 일련의 캐비넷의 하우징 외부의 입자 또는 기타를 위해 관찰되는 방의 천장 패널 위를 통과할 것이다. 이런 장치는 관찰되는 지역에 유체를 전달하는 샘플링 지점 장치에 이르는 주요 샘플링 파이프에 연결된 파이의 길이를 사용할 수 있다.
본 발명의 이런 양태의 실시태양에서, 이웃 지역의 샘플링 지점 장치의 간격은 파이프에서 흐름 통로를 따라 측정될 때 샘플링 파이프 네트워크까지의 연결 지점 사이의 거리보다 더 가깝다.
도 22 및 23은 추가 실시예를 예시한다. 도 23은 공기 샘플링 네트워크(26)에 연결된 입자 탐지기(11)를 포함하는 시스템(2300)을 예시한다. 공기 샘플링 네트워크는 하나의 일련의 3개의 나란한, 바람직하게는 평행한 샘플링 파이프 부분(2202, 2204, 2206)을 포함한다. 하류 파이프 부분(2202)은 한 말단 상의 입자 탐지기(11)에 연결되고 다른 말단 상의 다음 샘플링 파이프 부분(2204)에 연결된다. 샘플링 파이프 부분(2204)은 또한 상류 샘플링 파이프 부분(2206)에 연결된다. 샘플링 지점들(29)은 각각의 샘플링 지점(29)이 이웃한 다른 샘플링 파이프 부분에 연결되도록 배열된다. 즉, R1에 서비스를 제공하는 샘플링 지점은 파이프 부분(2202)에 연결되는 반면 R2에 서비스를 제공하는 샘플링 지점은 샘플링 파이프 부분(2204)에 연결되며 R3에 서비스를 제공하는 샘플링 지점은 샘플링 파이프 부분(2206)에 연결된다. 이런 패턴이 반복되어 R4에 서비스를 제공하는 샘플링 지점은 샘플링 파이프 부분(2202) 등에 연결된다. 이런 방식으로, 샘플링 파이프의 흐름 통로의 길이를 따라 측정될 때, 샘플링 지점(29) 사이의 거리는 하나의 일련의 샘플링 파이프가 사용되었을 경우의 3배이다. 연결 지점 사이의 증가된 분리는 한 샘플링 입구로부터 다른 샘플링 입구로 끌어당겨진 샘플을 분석하는 것을 더욱 수월하게 한다.
파이프 네트워크를 따라 샘플링 지점 외부로 퍼지는 것 이외에, 구현될 수 있는 추가 장점은 파이프 네트워크에 대한 연결 순서의 (상대적) 재-결정으로부터 발생하며, 이는 위치측정의 신뢰성을 증가시킬 수 있다. 일부 경우에 샘플링 파이프 네트워크에서 샘플의 혼합 또는 결합은 물리적으로 이웃한 지역에서 입자의 존재를 숨길 수 있다(또는 거짓으로 나타낼 수 있다). 샘플링 지점 네트워크에서, 이웃의 지역으로부터, 한 지역의 공기 샘플링 지점의 연결 지점을 분리시킴으로써(가장 바람직하게는 적어도 하나의 이웃하지 않은 지역에 서비스를 제공하는 샘플링 지점을 연결함으로써) 샘플링 시스템의 공기 샘플의 수준 독립성은 더 높은 등급으로 유지될 수 있다.
따라서 복수의 지역을 관찰하기 위한 입자 탐지 시스템을 위한 공기 샘플링 시스템이 제공되며, 상기 지역은 적어도 하나의 지역이 지역의 다른 것과 물리적으로 인접하도록 배열되며, 공기 샘플링 시스템은 각각이 개별 지역에 서비스를 제공하며, 샘플링 파이프에 연결되어 적어도 하나의 지역의 샘플링 입구 배열은 물리적으로 이웃하는 지역의 연결 지점으로부터 분리된 연결 지점을 가지는 복수의 샘플 입구 배열을 포함하는 샘플링 파이프 네트워크를 포함한다. 가장 바람직하게는 적어도 하나의 이웃하지 않는 지역의 샘플링 지점 장치의 연결 지점은 이웃하는 지역의 샘플링 입구 배열의 연결 지점 사이에 위치된다. 공기 샘플링 시스템 및 적어도 하나의 입자 탐지기를 포함하는 입자 탐지 시스템이 또한 제공된다.
도 23은 이 계획을 실행하는 다른 실시태양을 예시한다. 이 실시예에서 입자 탐지기(11)는 위치측정 모듈(2004) 및 샘플링 파이프 네트워크(26)에 결합된다. 샘플링 파이프 네트워크(26)는 서로 연결되고 지역 R1 내지 R8을 지나서(또는 통과해서) 함께 연장되는 4개의 공기 샘플링 파이프 부분(2302, 2304, 2306, 2308)을 가진 단일 샘플링 파이프(28)를 포함한다. 이 실시예에서, 파이프(28)의 최상류 말단은 상기한 대로 위치측정 모듈(2004)에 연결된다. 파이프(28)의 하류 말단은 위치측정 모듈(2004)을 통해 탐지기(11)에 연결된다. 위치측정은 본 발명에 기술된 방법들의 임의의 것을 이용하여 실행될 수 있다.
각 지역 R1 내지 R8의 샘플링 입구는 다음과 같이 파이프 단편(2302 내지 2308)에 연결된다:

따라서 지역은 다음 순서(즉 탐지기에 가장 가까운 말단으로부터 탐지기로부터 가장 먼 말단까지)로 하류로부터 상류까지 파이프 네트워크에 연결된다:
R1, R5, R7, R2, R4, R6, R8, R3
이런 방식으로 어떤 지역도 이웃 지역 옆의 샘플링 파이프(28)에 연결된 공기 샘플링 장치(29)를 갖지 않으며 연결 지점은 파이프 네트워크를 따라 넓게 이격된다.
모든 다른 양태에서 이 실시태양은 본 발명에 기술된 다른 계획에 따라 작동할 수 있다.
파이프 부분은 당업자에게 공지될 것과 같이 말단에서 부품과 연결된 파이프의 개별 길이일 수 있고 또는 선택적으로 특별한 목적의 다중 채널 파이프가 사용될 수 있다. 파이프 단편의 연결은, 예를 들어, 파이프의 채널의 말단 위에 또는 속에 연결될 수 있는 연결 부품을 사용하여 발생한다. 여러 채널 파이프의 사용은 설치 기술자가 여러 파이프 대신 하나의 요소만을 다룬다는 점에서 설치 장점을 제공할 수 있다.
본 실시예는 직선으로 배열된 지역 R1 내지 R8의 그룹을 참조하여 기술되었지만, 이것이 사실이 될 이유는 없다. 실제로 지역은 임의의 기하학적 배열로 배열될 수 있다. 또한 예를 들어, 방들이 물리적으로 분리된 것과 같이, 지역이 물리적으로 분리되어야 하는 조건도 없으나, 더 큰 공간 또는 부피 내의 지역일 수 있다.
상기 기술이 기술분야에서 신뢰 있게 작동하도록 하기 위해서, 시스템을, 예를 들어, 각 샘플링 입구에 들어가는 공기 샘플이 탐지기(또는 각각의 탐지기)에 도달하기 전에 이동한 공기의 부피에 대해 시스템을 교정하거나 훈련시키는 것이 필요하며, 따라서 시스템의 특징을 효과적으로 묘사한다. 가장 바람직하게는 시스템이 훈련되는 동안 공기는 시스템의 위치측정 모드 동안과 동일한 방식으로 시스템을 통해 이동된다. 예를 들어, 도 15와 관련하여 아래 기술된 대로, 시스템이 푸셔 팬 방법을 사용하는 경우, 푸셔 팬이 작동하지 않을 때 시스템이 정상적인 탐지 작업을 사용하여 훈련되는 경우 현저한 위치측정 에러가 발생할 수 있다. 시스템이 단일 공기 이동 장치, 예를 들어, 팬 등을 가지거나 탐지 모드로부터 위치측정 모드로 변할 때 탐지 시스템을 통해 흐름 임피던스 또는 흐름 통로를 급격하는 변화시키는 장치가 없는 한 형태에서, 비교적 단순하나 시간이 소요되는 과정이 훈련 모드에서 실행될 수 있다. 이 경우 시스템은 다음과 같이 훈련될 수 있다. 시스템이 정상적으로 작동하면서, 시스템은 테스트 연기, 예를 들어, 연기 스프레이가 분산되는 시간으로부터 시작하여 연기가 탐지기에 도달할 때까지 이동된 공기의 부피를 측정한다. 이런 측정은 각 샘플링 입구에 대해 이루어진다. 그러나 이것은 훈련 순서가 각 입구에 대해 개별적으로 실행될 필요가 있고 시스템이 각 사이클 사이에서 정상 작업으로 되돌아가도록 방치될 필요가 있기 때문에 시간이 소요될 수 있다. 바람직하게는 훈련 모드는 훈련 시간을 감소시키도록 변형된 작동 상태를 사용한다.
다른 실시태양, 예를 들어, 수송 단계 동안 파이프의 말단에 개방 밸브와 필터를 가진 시스템에서, 훈련 모드는 일정 기간 동안 파이프의 말단에서 밸브를 개방하는 단계를 필요로 한다. 연기는 각 샘플 구멍에(또는 선택 패턴으로 여러 구멍에) 선택적으로 투여될 수 있어서 시스템은 구멍을 통해 여전히 연기를 흡입할 것이다.
훈련 모드에서 시스템은 다음과 같이 작동한다:
a. 시스템은 파이프의 말단에서 밸브를 개방한다.
b. 사용자는 연기가 샘플링 입구에 투여될 때 탐지기에 입력한다.
c. 탐지기는 연기가 각 샘플 입구에 대해 탐지될 때까지 지정된 시간으로부터 시작하여 이동된 공기의 부피를 측정한다.
푸셔 팬(및 바람직하게는 파이프의 말단에 밸브 및 필터)를 가진 실시태양에서, 샘플링 파이프에 들어가는 연기를 모방하는 것이 더욱 어렵다. 예를 들어, 분무 연기가 샘플링 입구 속에 들어오게 하면서 푸셔 팬이 계속 작동하게 하는 것은 불가능하다. 따라서 다음과 같은 다른 방법이 필요하다.
a. 주입된 연기에 의해 다음을 포함하는 표준 벨로우 작업을 반복한다:
i. 시스템을 정상적으로 작동한다;
ii. 교정 과정에 들어간다;
iii. 입자가 탐지된 것과 같이 벨로우를 활성화하고 사용자에게 이 과정이 시작되었다는 것을 알려준다;
iv. 사용자는 테스트 중에 샘플링 입구에 분무 연기를 가한다.
v. 벨로우를 불활성화하고 푸셔 팬을 켜서 정상적으로 수송 단계로 들어가게 하고 연기가 탐지기에 도달하기 전에 수송된 공기의 부피를 기록한다.
vi. 시스템은 구멍이 교정되었다는 것을 나타내다.
vii. 시스템은 밸브를 밀폐하고 푸셔 팬을 끈다.
viii. 다른 샘플 입구가 동일한 방식으로 교정된다.
b. 특수 훈련 모드:
i. 시스템은 정상적으로 작동한다.
ii. 사용자는 시스템을 테스트 모드로 설정한다.
iii. 시스템은 공기를 정상적으로 계속 끌어당기고 사용자는 구멍에 분무 연기를 가하고 이를 시스템에 알려준다.
iv. 시스템은 즉시 푸셔 팬을 작동시킨다.
v. 시스템은 "분무 시작"의 표시 및 탐지되는 연기 사이의 흐름 센서를 통해 공기의 부피를 기록한다.
vi. 시스템은 샘플 입구가 교정되었다는 것을 나타낸다.
vii. 시스템은 밸브를 닫고 푸셔 팬을 정지시킨다.
viii. 다음 홀이 동일한 고정을 사용하여 교정된다.
c. 특수 연기 주입기.
이 방법은 사용자를 위해 더 신속하나 사용자는 특수 장비를 필요로 한다. 이 방법은 파이프의 다른 양의 압력의 방식으로 연기가 샘플 입구 속으로 분사되게 하는 주입 장치의 사용을 필요로 한다. 이를 실행하는 한 방식은 샘플 입구 둘레를 밀봉하고 연기를 입구 속으로 분사하는 테스트 연기 발생기의 사용을 필요로 한다. 예를 들어 연기 발생기는 샘플 입구 둘레를 꽉 죄는 기포 캐스킷을 포함하는 출구를 가질 수 있어서 공기가 샘플 구멍 밖으로 나오지 않는다. 장착되고 샘플이 샘플링 입구 속으로 주입되면 사용자는 이 연기가 분사되었다는 것을 시스템에 입력한다. 시스템은 연기 펄스가 탐지기에 도착하기 전 이동한 공기의 부피를 기록한다. 도 27은 예시적 장치를 도시한다. 비록 이 장치는 유리하게는 비디오 확인 시스템과 함께 사용될 수 있는 적응을 포함하나, 이 장치는 필요에 따라 이런 적응 없이 사용될 수 있다.
시스템의 작동 상태를 실험적으로 테스트하기 보다는 시뮬레이터가 사용될 수 있다. 시뮬레이터는 (Xtralis Pty Ltd로부터의) Aspire와 유사하다. 시뮬레이터는 실제 시스템 구멍 치수 및 거리를 기반으로 수송 단계 동안 구멍당 예상된 부피를 작업한다.
상기 테스팅 방법에서 사용자는 입력정보를 탐지기에 전달하기 위해, 예를 들어, 훈련 모드에 들어가기 위해 또는 언제 테스트 연기가 분사되었는지를 나타내기 위해 직접 탐지기와 상호작용할 수 있다. 그러나 한 바람직한 실시태양에서 탐지기 시스템은 인터페이스, 바람직하게는 무선수신장치를 포함하며, 이에 의해 탐지기는 사용자 장치, 예를 들어, 휴대용 컴퓨터, 태블릿 컴퓨터, 스마트폰 등과 통신하며 사용자 장치는 탐지기가 기술된 대로 작동하도록 제어되게 하는 애플리케이션을 사용한다.
일부 입자 탐지 시스템에서, 입자 탐지 시스템을 비디오 안전 또는 감시 시스템과 조화시킴으로써 향상이 제공될 수 있다. 이런 시스템은 (예를 들어, 입자의 탐지를 확인하도록 시도하기 위해 비디오 분석을 실행함으로써) 추가 입자 탐지 방법을 실행하거나 모니터링 스테이션(CMS)의 인간 작업자가 입자가 탐지된 지역을 관찰하여 입자 탐지 사건의 인간 확인이 가능하도록 하기 위해 비디오 안전 시스템에 의해 캡처된 이미지를 사용한다. 이것은 위협 수준을 결정하고 탐지 사건에 대한 적절한 반응을 결정하는 것을 도울 수 있다. 입자(특히 연기) 탐지기와 비디오 안전 시스템을 포함하는 예시적 시스템은 도 24에 예시된다. 이런 시스템 및 이의 작업의 추가 세부내용은 2013년 6월 7일 출원되고 멀티 모드 탐지라는 제목의 공동 출원 PCT 출원에 기술된다.
도 24는 복수의 방을 포함하는 빌딩(2400)의 평면도이다. 방의 각각은 개개의 카메라에 의해 관찰되는 지역에 속하는 것으로 나타내어진다. 이와 관련하여, 지역 1은 카메라(2401)에 의해 관찰되고; 지역 2는 카메라(2402)에 의해 관찰되고; 지역 3은 카메라(2403)에 의해 관찰되고; 지역 4는 카메라(2404)에 의해 관찰되고; 지역 5는 카메라(2405)에 의해 관찰되고; 지역 6은 카메라(2406)에 의해 관찰되고; 지역 7은 카메라(2407)에 의해 관찰되고; 지역 n은 카메라(2408)에 의해 관찰된다.
지역의 각각은 또한 입자(2410.1 내지 2410.n)를 탐지하기 위한 수단을 포함한다. 입자(2410.1 내지 2410.n)를 위한 수단은 임의의 형태일 수 있으며, 지점 탐지기, 흡입 탐지기, 빔 탐지기, 개방 지역 활성 비디오 탐지기를 포함한다. 본 실시예에서 입자(2410.1 내지 2410.n)를 탐지하기 위한 수단은 입자 탐지기(2411)에 연결된 공기 샘플링 파이프(2413)에 대한 공기 샘플링 입구이어서 본 발명에 기술된 형태의 임의의 하나의 입자 탐지 시스템을 형성한다. 입자 탐지 시스템은 본 발명에 기술한 대로 어느 샘플링 지점(2410.1 내지 2410.n)으로 입자가 들어갔는지를 측정하도록 배열되며 각 탐지기 지점(2410.1 내지 2410.n)에 대한 입자 수준 또는 경보 수준을 나타낸다. 샘플링 지점(2410.1 내지 2410.n)에 연결된 입자 탐지기(2411)는 FACP 또는 중앙 컨트롤러(2412) 형태의 빌딩 화재 경보 시스템에 연결되고 빌딩(2400) 내의 화재 탐지 위치가 화재 경보 시스템에 의해 나타내어지게 하도록 그 시스템에 주소를 갖기 때문에 각 샘플링 지점을 개별적으로 확인하도록 배열된다. 카메라(2401 내지 2408)의 각각은 중앙 제어 시스템(2412)에 연결된다. 중앙 제어 시스템(2412)은 여러 카메라로부터 비디오 공급을 수신하고 분석하는 비디오 분석 시스템이다. 중앙 컨트롤러는 또한 비디오 공급을 저장하고 실시간 또는 사건이 탐지됨에 따라 요구가 있는 즉시 중앙 모니터링 스테이션에 비디오 공급을 전송할 수 있다. 컨트롤러(2412)는 통신 채널을 통해 화재 관련 및 안전 관련 경보 상황이 관찰될 수 있는 중앙 모니터링 스테이션(CMS)(2414)에 연결된다. 다른 실시태양에서 컨트롤러(2412) 및 FACP의 기능은 단일 장치 속에 결합될 수 있다. 또한 중앙 모니터링 스테이션(2414)의 기능은 컨트롤러(2412)에서 실행될 수 있다. 유사하게 카메라 및 다른 안전 시스템(도시되지 않음) 및 화재 및/또는 연기는 모든 관찰 및 분석(즉, 컨트롤러(2412) 및 FACP의 기능)을 직접 실행하는 원거리 CMS에 직접 연결될 수 있다.
화재가 도 24의 빌딩(2400)의 지역 2에서 시작되는 상황을 고려한다. 이 경우에, 방 내에 위치한 샘플링 지점(2410.2)은 줄기(2413)에서 연기 입자의 존재를 나타내는 샘플 공기를 끌어당길 것이다. 일단 최초 탐지가 이루어지면 탐지기(2411)는 상기한 대로 위치측정을 실행하고 화재 경보 컨트롤 패널(FACP)에 경고 신호를 제공하여 추측된 화재의 위치를 나타낼 것이다. 이런 시스템에서 통상적인 것과 같이 탐지기(2411)의 출력 신호는 탐지된 입자의 수준 또는 탐지기의 경보 논리에 따라 결정된 경보 상태를 나타낼 수 있다. 화재 경보 컨트롤 패널은 이 경고 데이터를 중앙 컨트롤러(2412)를 통해 직원이 빌딩(240)의 상태를 관찰할 수 있는 중앙 모니터링 스테이션(2414)에 다시 전달할 것이다. 시스템은 비디오 입증 능력을 포함하기 때문에, 입구(2410.2)를 통해 지역 2의 입자의 탐지시에, 카메라(2402)를 사용하는 비디오 확인이 활성화된다. 카메라(2402)는 (카메라가 사전에 이미지를 캡처하지 않은 경우) 연기가 이미지로부터 존재하는 것으로 확인될 수 있는지를 결정하기 위해 이미지를 캡처하고 이미지를 분석하는 것을 시작한다. 카메라(2402)로부터의 비디오 공급은 중앙 컨트롤러(2412)에 제공된다. 중앙 컨트롤러(2412)는 카메라(2402)에 의해 캡처된 일련의 프레임에 대한 비디오 분석을 실행하여 카메라(2402)의 시계(2402.1) 내에서 연기 또는 화염의 존재를 나타내는 이미지에 시각적 특징이 존재하는지를 측정한다. 이런 비디오 분석은 컨트롤러(2412) 또는 중앙 모니터링 스테이션(2414)에서 실행될 수 있다. 분석이 중앙 모니터링 스테이션(2414)에서 실행될 경우, 아마도 압축 형태의 비디오 이미지가 위치 컨트롤러(2412)로부터 중앙 모니터링 스테이션(2414)으로 분석을 위해 전송될 필요가 있을 것이다. 카메라(2402)에 의해 캡처된 이미지에서 연기 또는 화재의 탐지시에 중앙 모니터링 스테이션(2414)에서 실행되는 경보 시스템은 연기 탐지기(2410.2)에 의해 나타낸 경보 상태가 비디오 분석 시스템에 의해 확인되는지를 나타내도록 이의 출력을 변형시킬 수 있다. 이런 확인으로부터 사용자는 가짜 경보의 확률이 낮다는 것을 추론할 수 있다.
중앙 모니터링 스테이션(2414)을 관찰하는 사용자에게 화재 또는 연기 경보가 확인되었다는 사실을 나타냄으로써, 그 경보의 중요 수준은 높아지게 될 것이다. 따라서 시스템을 관찰하는 사람은 경고에 대해 더욱 빠르게 대응하도록 격려될 것이다. 도 25 및 26은 본 발명의 실시태양에 따른 중앙 모니터링 스테이션을 위해 제공될 수 있는 2개의 선택적인 인터페이스를 도시한다. 먼저 도 25를 참조하면, 인터페이스는 복수의 비디오 디스플레이 패널(2501, 2502, 2503 및 2504)을 포함하며 이의 각각은 관찰되고 있는 빌딩(2400) 내의 다른 카메라로부터 캡처된 이미지를 보여준다. 장소의 더 가까운 시계를 모니터링 시스템의 사용자에게 제공하기 위해 대형 관찰 창(2501)이 제공되어 사용자는 경고가 발생된 장소를 시각적으로 검사할 수 있다. 더 작은 디스플레이 창(2502 내지 2504)은 적절한 계획에 따라 순환할 수 있거나 상응하는 지역에서 경고 수준에 따라 우선 순위로 교대로 정렬될 수 있다. 인터페이스(2500)의 바닥 부분은 사건의 목록(2507)을 포함한다. 각 사건에 대해, 사건 데이터가 보이고 시스템의 사용자는 특정 반응 작용을 실행하도록 일련의 버튼(2509)이 제공된다. 각 사건에 대해 다음 데이터가 보인다: 사건 번호 2512는 사건의 수치 목록이며, 사건 ID 2514는 나중에 접근하기 위한 로그 사건 데이터를 인덱싱하기 위해 사용된 사건에 대한 시스템 전체의 고유 식별자이며; 사건 설명 2516은 사건의 성질을 설명하며; 사건 수준 2518은 사건에 대한 우선 순위이며; 예를 들어, 상태가 경보 또는 고장 또는 다른 특정 형태의 경고인지의 사건 상태(2520)의 표시자는 일련의 작동 버튼(2522.1, 2522.2, 2522.3)이다.
본 실시예에서 사건 번호 5는 최고 경고 상태를 가지며 본 발명에서 더욱 상세하게 기술될 것이다. 사건 번호 5는 연기가 지역 2에서 탐지되었다는 표시이다. 이 실시예에서 연기는 경보가 울려야 한다는 것을 나타내는 수준에서 입자 탐지기(2410.2)에 의해 탐지되었다. 상태 열에서, 비디오 분석 시스템이 카메라(2402)의 출력을 분석하였고 연기 및 화재가 존재한다는 것을 측정하였기 때문에 사건은 "확인된 경보"로 표시된다. 시스템의 사용자에게 확인을 표시하기 위해서, 인터페이스는 사건 번호 5에 해당하는 상태 박스를 강조하였고 문자 형태로 경보가 "확인됨"을 표시하였다. 추가로 알게 될 것과 같이 지역 2의 이미지는 비디오 분석 시스템에 의해 탐지된 연기 및 화재의 위치의 시각적 식별자(2508)를 포함한다. 이와 관련하여, 비디오 분석 시스템은 카메라(2402)에 의해 캡처된 일련의 이미지의 분석을 실행하였고 연기를 나타내는 것으로 측정된 이미지 내의 지역 주변의 경계 또는 모서리를 나타내었다. 또한, 이미지(2510) 내의 지역의 표시는 화재를 유발하고 있는 화염을 나타내는 것으로 보이도록 표시된다.
도 26은 도 25의 인터페이스에 대한 선택적 인터페이스를 도시하며 두 도면의 인터페이스 사이의 유일한 차이점은 사건 번호 5의 상태가 "확인되었다"는 것을 간단히 표시하기보다는 도 26의 인터페이스는 경보 수준 및 확인 수준에 따라 사건 목록에 사건의 각각에 순서를 매긴다는 것이다. 이것은 시스템 내의 다른 사건과 비교하여 더 높은 우선순위가 사건 번호 5에 제공되어야 한다는 것을 추가로 강조한다.
일단 사건이 탐지되고 자동 비디오 확인 시스템에 의해 확인되면, 사건에 반응하여 실행될 행동을 결정하는 것은 시스템의 인가 사용자에 의해 결정될 것이다. 사용자는 사건(2522.2)을 무시하도록 선택할 수 있고 또는 추가로 조사하거나 경찰, 소방대 또는 다른 적절한 긴급 반응 서비스에 전화를 함으로써 외부 경보(2522.3)를 울리도록 사건에 해당하는 비디오 공급(버튼(2522.1))을 관찰하도록 선택할 수 있다. 이것은 표시된 대로 버튼 보기(2522.1), 무시(2522.2) 또는 전화(2522.3)를 사용하는 도 25 및 26의 인터페이스를 사용하여 실행될 수 있다.
본 발명의 다른 실시태양에서, 비디오 분석 시스템은 진행중인 사건의 조사에서 사용자를 추가로 돕는다는 것이 유리하다. 이와 관련하여, 시스템의 사용자는, 예를 들어 어디서 사건이 시작되었는지 또는 사건의 원인이 무엇인지, 예를 들어 무엇 또는 물체에 화재가 낫는지 또는 불에 탈 위험에 있는지 및 연기 탐지 사건을 일으켰는지를 측정함으로써 경고의 원인을 조사하는 것을 원할 수 있다. 이런 정보는 경고 상태에 대한 반응 전략을 결정하는데 특히 유용할 수 있다. 예를 들어, 무엇에 화재가 낫는지가 정확히 알려진 경우 적절한 진압 전략이 실시될 수 있다. 또한, 어떤 수준의 반응이 필요한지를 결정하기 위해 화재 근처의 무엇이든 시각적으로 검사될 수 있다. 예를 들어, 중요한 장비 또는 위험한 또는 가연성 물품이 화재가 있는 위쪽 지역을 둘러싸는 경우, 더 빠른 반응 또는 완전한 대피가 필요할 수 있는 반면 화재가 상대적으로 개방된 지역 또는 비 가연성 물품이 위치한 지역에서 탐지된 경우 더 느린(또는 적어도 다른) 반응이 허용될 수 있다.
조사 과정을 지원하기 위해서, 중앙 모니터링 스테이션에 하나 이상의 카메라 및 상태 센서로부터 경보 출력을 분석하고 사건의 원인 또는 성질에 대해 권장된 조사의 순서를 사용자에게 권장하는 소프트웨어가 제공될 수 있다. 예를 들어, 소프트웨어 시스템은 관찰되고 있는 것을 전제로 방과 물품의 상대적 위치에 대한 지도 또는 다른 기하학적 데이터를 저장할 수 있고 어느 샘플링 입구가 입자를 수용하였는지를 나타내는 데이터를 사용하여, 화재가 시작된 가능성 있는 중심 지점 또는 조사 우선성을 결정할 수 있다. 예를 들어, 도 25 및 26에서 확인된 경보가 지역 2에서 감지되었고 확인되지 않은 경보가 지역 3에서 감지되었다. 사전-경보는 지역 1에서 감지되었다. (도 25에서 2510으로 표시된) 화염의 존재의 확인이 가능하지 않은 상황에서, 중앙 모니터링 스테이션은 지역 2, 지역 3, 지역 1, 지역 N의 순서로 다른 지역의 수동 분석 순서를 권장할 것이다. 이것은 지역 2, 3 및 1의 수신된 경고 수준 및 지역 2, 3, N 및 7의 출입구의 가까움 및 지역 1은 이들 사이의 복도라는 사실을 기초로 한다. 다른 실시태양에서 다른 인자가 조사 순서를 측정하는데 역할을 할 수 있는데, 예를 들어, 빌딩의 에어 컨디셔닝 리턴 덕트가 위치(2420)에 위치하는 경우 지점(2410.12)을 통과하는 비정상적인 입자 수준의 탐지기는 다른 공기 샘플링 지점보다 더 낮은 우선순위로 취급되는데 이는 상기 탐지기가 다른 공기 샘플링 지점보다 더 자주 연기를 나타낼 것이기 때문이다.
따라서 연기는 예를 들어 지역 2 및 지역 1의 샘플링 지점(2410.12)에서 탐지되어야 하고 지역 2는 가망 있는 화재의 원인이다. 반대로 다른 샘플링 지점이 아니라 단지 샘플링 지점(2410.11 및 2410.12)이 연기를 함유하는 샘플을 끌어당기는 것으로 측정되는 경우, 지역 1이 화재 상태의 가망 있는 원인이다.
도 25의 사건 5에 적용된 비디오 확인 과정 없이 지역 2 및 3의 경보 수준은 동일할 수 있다는 것에 유의하는 것은 유용하다. 비디오 확인 없이 물리적 검사 이외에는 화재가 지역 3이 아닌 지역 2에 실제로 존재하는지에 대한 결정에 기초를 두는 추가 정보는 없을 것이다. 이것은 분명하게 본 발명에 기술된 비디오 확인 과정 때문에 반응이 화재가 실제로 존재하는 곳인 지역 2에 대해 먼저 표적으로 하게 하는 반응 전략을 돕는다.
예시된 센서(예를 들어, 카메라)는 고정된 카메라일 수 있거나 시계를 변경할 수 있는데, 예를 들어, 팬-틸트-줌(PTZ) 카메라일 수 있다. PTZ 카메라가 사용된 경우 이 카메라는 잠재적으로 조사를 가능하게 하는 경고 상태를 유발하는 것으로 확인된 위치를 분리하기 위해 팬하고, 틸트하고 줌하도록 프로그램될 수 있다. 선택적으로 또는 추가적으로 PZT 카메라는 제 1 시계의 이미지를 캡처한 후 제 2 시계로 이동하며 가능하게는 연속적으로 하나 이상의 추가 시계로 이동하여, 각 시계에서 지정된 시간 동안 정지하도록 제어될 수 있다. 순서는 무한히 반복될 수 있다.
비디오 분석이 다른 시계와 독립적으로 각 시계에 실행될 수 있다. 일반적인 용어로 이것은 각각의 PTZ 세팅이 타임 슬롯에 해당하는 다른 PTZ 세팅에서 하나의 카메라로 촬영한 이미지의 시분할 다중화(time division multiplexing)를 실행하는 과정으로 생각될 수 있다. 비디오 분석은 각 PTZ 타임 슬롯의 연속적 경우로부터의 일련의 이미지에 대해 실행될 수 있다. 상응하는 PTZ 타임 슬롯에서 캡처된 이미지는 "카메라"로 취급될 수 있고 비디오 분석은 단일 카메라에 대해 이전 실시예에서 기술된 기술을 사용하여 실행될 수 있다.
공기 샘플링 입구의 위치를 이들의 물리적 위치 및 안전 시스템의 카메라의 시계와 연관시키는 것이 필수적이라는 점에서, 이와 같은 시스템은 상기한 커미셔닝/교정 과정에 추가 중요함을 제공한다. 일부 경우에 특정 카메라의 PTZ 변수를 샘플링 지점과 연관시키는 것이 더욱 바람직할 것이다.
입자 탐지 시스템의 주소를 복수의 위치를 관찰하는 비디오 캡처 시스템에서 관찰되는 위치와 연관시키는 장치 및 방법은 도 27과 관련하여 이제 기술될 것이며, 상기 주소는 물리적 위치에 해당한다. 도 27은 입자 탐지 시스템을 편리하게 커미셔닝, 교정 및/또는 테스팅하기 위해 사용될 수 있는 예시적 장치(2700)를 예시한다. 이는 또한 통상적인 흡입 입자 탐지 시스템과 같은 비-비디오 가능 입자 탐지 시스템에 사용될 수 있으며, 다음 설명으로부터 명백해질 것이다.
장치는 연기 테스트를 실행하는 장치를 제공하도록 배열되어 연기의 위치는 연기 탐지 시스템에 의해 알 수 있으며 경고의 비디오 확인을 가진 시스템의 경우, 안전 시스템은 또한 동시에 일어나는 방식이다. 장치는 작업자가 공기 샘플링 입자 탐지기 시스템, 지점 탐지기 또는 다른 연기 감지 장치의 각 샘플링 입구에 바람직하게는 특정한 순서 없이 연기(또는 다른 테스트 입자)를 주입하고, 예를 들어, 태블릿 컴퓨터 등과 같은 필수 컴퓨터 장치에 입구 또는 감지 장치의 물리적 위치를 기록하는 것을 가능하게 한다. 데이터는 실시간 또는 그 후에 입자 탐지기로 전달될 수 있어서, 입자 탐지기는 어느 입구가 물리적 위치에 대해 지도로 표시되는지를 안다. 바람직하게는(필수적은 아님) 상기 장치는 안전 시스템이 어느 특정 카메라(및 선택적으로 PTZ 변수)가 각각의 입구 주소 위치와 관련이 있는지를 확인하는 것을 가능하게 한다. 입구 또는 센서 위치의 비디오 안전에서 위치와 연관성은 시각적 수단에 의해 성취될 수 있다. 연기 주입이 일어남에 따라, 시각적 식별자는, 예를 들어, 시간에 대한 코드에 빛을 비춤으로써 활성화된다. 안전 시스템은 시각적 식별자를 검색하며 여러 카메라에 의해 캡처된 이미지들 중에서 이의 이미지를 확인한다. 안전 시스템은 정확한 카메라 및 선택적으로 PTZ 위치를 공기 샘플링 입구 또는 센서의 위치와 연관지을 수 있다. 따라서 바람직한 실시태양에 따른 장치(2700)는 다음을 포함한다:
연기를 샘플링 입구에 전달하기 위한(바람직하게는 발생시키기 위한) 장치;
비디오 안전 시스템에 의해 캡처된 이미지에서 장치의 탐지를 가능하게 하는 수단 및 선택적으로 이런 광학 수단에 대해 데이터를 전달하기 위한 수단;
장치의 작용과 입자 탐지 시스템 및/또는 안전 시스템을 동기화하기 위한 수단.
더욱 구체적으로 예시적 장치(2700)는 다음을 포함한다:
디바이스 장치(2700)의 작업을 제어하는 컨트롤러(2702).
통상적으로 배터리가 될 전원(2704).
필요에 따라 샘플링 지점에 주입하기 위한 테스트 연기를 생산하는 연기 발생기(2706).
연기를 전달 지점으로 밀어내는 팬(2710).
연기 발생기(2706)에 의해 발생된 연기를 전달 지점까지 안내하는 덕트(2712). 이 실시예에서 덕트(2712)는 다른 지점의 높이의 샘플링 지점에 의한 편리한 사용 및 편리한 장치 저장을 가능하게 하는 연장가능한, 예를 들어, 망원경식 파이프이다. 덕트(2712)는 샘플링 지점에 또는 근처에 쉽게 결합되게 하는 형태를 가진 출구(2714)에서 종료된다. 이 실시예에서 출구(2714)는 샘플링 지점 위 또는 근처에 일치할 수 있는 깔때기 모양 출구이다.
이 경우에 사용자 인터페이스(2716)는 하나 이상의 컨트롤 버튼(2718) 및 터치 스크린 디스플레이(2720)를 포함한다. 이들은 당업자에게 공지된 방식으로 장치(2700)의 작업을 제어하고 상기한 대로 데이터를 입력하도록 구성될 수 있다.
유선 또는 무선일 수 있는 동기화 포트(2722)는 외부 장치, 예를 들어, 연기 탐지 시스템, 비디오 안전 시스템 또는 이런 시스템의 요소와 데이터 통신을 설립하기 위한 통신 수단이다. 포트(2722)가 무선인 경우, 포트(2722)는 실시간 통신을 위해 사용될 수 있다. 포트(2722)가 물리적 연결을 만드는데 적합한 경우, 통신은 실시간(예를 들어, 사용 동안 다른 시스템 속에 연결됨) 또는 비동기적으로(예를 들어, 사용 후 저장된 데이터의 저장 및/또는 장치와 연기 탐지 시스템 및 비디오 안전 시스템의 하나 또는 둘 다의 동기화) 이루어질 수 있다.
이 경우 시각적 통신 시스템(2724)은 복사에너지 방출기(2724.1, 2724.2, 2724.3)의 장치를 포함한다. 시각적 통신 시스템은 하기한 상식으로 장치(2700)의 사용 동안 안전 시스템과 통신하는데 사용될 수 있다. 시각적 통신 시스템(2724)은 수신되어 비디오 감시 시스템에 전달될 수 있는 한 가시 또는 비가시 복사에너지를 방출할 수 있다. 가장 바람직하게는 복사에너지는 안전 시스템에 의해 수신되고 한 지역의 비디오 이미지로 캡처된다. 이런 방식으로, 장치(2700)(및 선택적으로 데이터)의 존재는 시각적 통신 시스템(2724)의 상태에 의해 전달된다.
테스트 장치(2700)의 예시적 사용은 비디오 안전 시스템에 의해 실행된 비디오 확인을 가진 입자 탐지 시스템을 커미셔닝하는 것과 연결하여 기술될 것이다. 장치(2700)의 목적은 연기 탐지 시스템과 비디오 안전 시스템 사이의 통합의 구성 및 확인을 지원하고 바람직하게는 자동화하는 것이다. 구체적으로, 도구는 보호되는 물리적 위치의 동일한 판단을 하도록 연기 탐지 시스템 및 비디오 안전 시스템을 지원한다.
훈련 과정을 시작하기 이전에, 입자 탐지기 시스템 및 비디오 안전 시스템은 "훈련" 모드로 설정된다.
입자 탐지기 시스템의 각 샘플링 입구에서 연기가 기술자에 의해 장치(2700)를 사용하여 발생된다. 작동될 때, 장치(2700)는 입자 탐지 시스템이 입자를 탐지하도록 하는데 충분한 연기의 양을 발생시킨다. 연기를 발생시키는 트리거는 보안 시스템에 의해 캡처된 이미지에서 배경 물체로부터 구별될 수 있는 시각적 식별자에 스위치를 넣게 될 것이다. "훈련" 모드에 있는 동안 비디오 안전 시스템은 캡처된 이미지를 분석하고 이미지에서 시각적 식별자(2724)를 검색한다(주기적으로 또는 연속적으로). 일단 발견되면, 비디오 안전 시스템은 어느 비디오 카메라가 시계에서 샘플링 구멍 근처에 지역을 가질 것인지를 확인하기 위해 장치의 위치를 기록할 것이다(필요한 경우 카메라 및 PTZ를 미리 조정한다).
연기의 발생 지점에서, 기술자는 또한 예를 들어 터치 스크린 디스플레이(2720) 상의 키보드 인터페이스를 사용하여 물리적 공간의 이름(및 선택적으로 설명)을 기록한다. 이 글은 연기 테스트 시작 및 종료 시간과 함께 저장되며, 선택적으로 이 시스템에서 탐지된 사건과 연관짓기 위해 연기 탐지기 및/또는 안전 시스템으로 전송된다. 정상적인 작동 동안 이 지점에 입력된 글은 시스템의 실제 사용 동안 샘플링 구멍이 확인될 때 CMS 작동자에게 제공될 수 있다.
장치(2700)는, 예를 들어, 다음에 취해야 행동이 무엇인지에 대해 기술자에게 안내하도록 프로그램되는데, 예를 들어, 새로운 샘플링 지점으로 이동할 때, 기술자가 연기를 발생시키기 전 샘플링 구멍 등의 이름을 기술자에게 생각나게 하도록, 현재 구멍에서 연기 발생기와 함께 잔류하는데 기술자가 필요로 하는 있는 기간을 기다릴 필요가 있는지에 대해 안내하도록 프로그램된다.
샘플링 지점은 예외가 있지만 통상적으로 천장을 통해 위치된다. 발생된 연기는 빠르고 직접적으로 샘플링 구멍에 도달할 필요가 있다. 그러나, 샘플링 지점이 천정에 높이 창작된 샘플 구멍에 가장 근접하게 제공되게 할지라도 기술자가 항상 지상에 남아있는 것이 매우 바람직하여, 모든 컨트럴은 덕트(2712)의 바닥에 위치하고 덕트(2712)는 연장가능하다.
각 샘플링 구멍에 대한 연기 발생 시작 및 종료 사건은 입자 탐지 시스템 및 비디오 안전 시스템과 동기화된다. 이런 동기화는 무선 네트워크 상에서 실시간으로 이루어질 수 있다. 선택적으로 또는 대안적으로 장치(2700)는 오프라인 모드에서 무선 네트워크의 실시간 사용 없이 동일한 능력을 제공할 수 있다. 후자의 경우, 커미셔닝 과정의 종료시 장치(2700)는 물리적 공간의 이름을 포함하는 기록된 데이터를 동기화하도록 입자 탐지 시스템 및 비디오 안전 시스템과 연결될 필요가 있을 것이다. 이것은 USB, 이더넷 또는 와이파이를 포함하나 이에 제한되지 않는 임의의 통신 매체 또는 채널을 통해 실행될 수 있다.
도 24의 실시예에서 다음 일련의 데이터는 각각 테스트 장치, 연기 탐지 시스템 및 안전 시스템에 의해 "훈련" 모드로 생성된다.
| 시작 시간 | 종료 시간 | 물리적 위치 이름 | 좌표(선택적) |
| 1:00 | 1:01 | 큰 복도 | -37.813621 144.961389 |
| 1:05 | 1:06 | 회의실 | -37.813637 144.961398 |
| 1:08 | 1.09 | 도서관 | -37.813624 144.961398 |
| ... | ... | ... | ... |
| 1:30 | 1:31 | 청소부 벽장 | -37.813610 144.961372 |
| 시작 | 정료 | 위치 변수 | 입구 번호 |
| 1:00 | 1:01 | 130 리터 | 5 |
| 1:05 | 1:06 | 125 리터 | 4 |
| 1:08 | 1.09 | 100 리터 | 2 |
| ... | ... | ... | ... |
| 1:30 | 1:31 | 16 리터 | 1 |
| 시작 | 종료 | 카메라 | PT2 |
| 1:00 | 1:01 | 2401 | P=5 T=20 Z=200mm |
| 1:05 | 1:06 | 2403 | - |
| 1:08 | 1.09 | 3402 | - |
| ... | ... | ... | ... |
| 1:30 | 1:31 | 2405 | - |
일단 훈련 데이터가 테스트 장치(2700), 연기 탐지기 시스템 및 안전 시스템에 기록되면, 이 데이터는 실제 여기 탐지 사건과 함께 작동하도록 비디오 확인 시스템 및 연기 탐지 시스템을 위해 연관될 필요가 있다. 볼 수 있듯이 각 표의 시작 및 종료 시간은 연기 테스트 데이터를 연기 탐지기 데이터 및 안전 시스템 데이터와 연관하는데 사용될 수 있다.
사용시, 연기가 연기 탐지 시스템에 의해 탐지되는 경우 시스템 내 어디에서 연기가 탐지되었는지를 측정할 것이다. 시스템이 하나 이상의 점 탐지기를 포함하는 경우 사건이 탐지된 곳에 "주소를 지정하는" 즉 결정하는 것은 비교적 수월하며 단지 탐지기가 연기를 탐지했다는 인식을 필요로 한다. 시스템이 흡입 입자 탐지 시스템을 포함하거나 공기 샘플링 네트워크를 가진 흡입 입자 탐지 시스템인 경우, 시스템은 입자의 원인의 위치를 확인하기 위해 출원인에 의해 출원된 다음 호주 특허 출원 2012904516, 2012904854 또는 2013200353의 임의의 하나의 위치측정 방법들 중 하나 또는 다른 위치측정 기술을 실행할 수 있다. 출력은 위치, 이름(예를 들어, 커미셔닝 동안 기술자에 의해 제공된 이름), 방 주소 또는 연기 위치측정 변수(본 발명에 기술된 방법들 중 임의의 것을 사용하여 어느 샘플링 구멍을 통해 연기가 연기 탐지 시스템에 들어갔는지를 확인하는, 위치측정 단계 동안 탐지 사건 사이의 탐지기를 통해 통과된 공기 샘플의 부피)일 수 있다. 이런 이름, 식별자 또는 위치측정 변수를 기초로, 안전 시스템은 어느 카메라가 측정된 공기 샘플링 지점의 시계를 제공하는지를 측정할 수 있다.
이 경우, 안전 시스템은 카메라(2405)를 연기 탐지 사건이 발생된 지역의 시계를 보여줄 카메라로서 확인할 것이다.
이해될 것과 같이, 추가 정보는 연기 또는 화재가 탐지될 때 적절한 행동을 결정하는데 CMS 작동자를 돕기 위해 커미셔닝 동안 수집될 수 있다.
추가 특징은 장치(2700)의 일부 실시태양에 포함될 수 있다. 예를 들어, 일부 실시태양에서 다른 방법은 위치 및 샘플링 입구의 확인을 지원하거나 자동화하도록 장치(2700)의 위치를 측정하는데 사용될 수 있다. 예를 들어, 위성 위치지정(예를 들어, GPS 또는 DGPS) 또는 전자기 방출기로부터의 삼각측량이 어느 방에 장치가 있는지를 측정하는데 사용될 수 있어서, 데이터를 시스템 속에 입력할 필요가 없거나 최소화한다. 샘플링 지점에 어느 샘플링 지점이 각 단계에서 커미션되는 지를 확인하도록 덕트(2712)의 말단 근처에 장착된 리더기에 의해 읽히는 단거리 통신 장치, 예를 들어, RFID 태그가 제공될 수 있다. 이런 통신은 샘플링 지점을 위한 테스트 절차를 시작하기 위한 트리거로서 사용될 수 있다.
도 17은 도 14a 내지 14e의 시스템의 변형을 예시한다. 시스템(1700)은 도 14a 내지 14e의 시스템과 모든 면에서 동일하며 동일한 방식으로 작동하나, 샘플 확대 장치(1702)가 샘플링 파이프(28)의 상류 말단에 위치하는 것만 다르다. 이것은 샘플링 네트워크(26)의 탐지기 말단을 단순화하고 샘플 확대 장치(1702)의 이런 능력 없이 최초에 설치된 레거시 탐지 시스템에 대한 새로운 개선을 촉진한다.
도 18은 복수의 진동 막을 포함하는 샘플 확대 장치를 가진 공기 샘플링 네트워크를 포함하는 입자 탐지 시스템을 예시한다. 필수적으로 이 시스템(1800)은 도 14a 내지 14e 및 도 17의 시스템의 더블 엔디드 버전이다. 이 실시태양에서 2개의 피스톤(1802, 1804)(확성기의 진동 막으로 형성)은 함께 작용하여 샘플 확대 장치를 형성한다. 이들은 도 15의 마주보는 팬과 관련하여 기술된 대로 동시에 작동될 수 있다. 그러나, 확성기(또는 빠르게 진동하는 기류를 일으킬 수 있는 다른 유사 공기 이동 장치)가 되면 이런 피스톤(1802, 1804)는 샘플링 파이프(28)를 따라 하나 이상의 샘플 입구(29)에서 샘플 확대를 선택적으로 실행하는 새로운 능력을 제공한다. 이것은 피스톤 사이의 선택된 상 차이로 피스톤을 진동시킴으로써 성취될 수 있다. 이것은 샘플링 파이프(28)를 따라 다른 장소에서 샘플 확대 작용의 선택적 강화 또는 취소를 일으킨다.
도 19는 갈라진 샘플링 파이프를 가지며 복수의 진동 막을 포함하는 샘플 확대 장치를 가진 공기 샘플링 네트워크를 포함하는 다른 입자 탐지 시스템을 예시한다. 이 시스템(1900)은 공기 샘플링 시스템(26)에 결합된 입자 탐지기(11)를 포함한다. 공기 샘플링 시스템(26)은 갈라져서 샘플링 파이프(28a 및 28b)를 가지며 이의 각각은 길이를 따라 일렬로 배열된 복수의 샘플 입구(29a 및 29b)를 포함한다. 파이프(28a 및 28b)의 상류 말단에 피스톤(1902, 1904)이 위치된다. 공용 피스톤(1906)은 샘플링 네트워크(26)의 하류 말단에 위치된다. 피스톤(1902, 1904, 1906)을 포함하는 샘플 확대 장치는 샘플 확대 단계에서 피스톤의 진동 사이의 적절한 상 차이를 선택함으로써 이의 진동 작용을 선택적으로 취소하도록 작동될 수 있다. 예를 들어, 실시예에서 하류 피스톤(1906)은 파이프(28a) 상에서 상류 피스톤(1902)과 같은 상으로 작동되나 파이프(28b) 상에서 상류 피스톤(1904)과 반대 상으로 작동된다. 결과는 샘플 확대는 입구(29b) 상이 아니라 샘플 입구(29a)에서만 일어난다는 것이다.
이 과정은 도 18과 관련하여 기술된 방법으로 연장되고 결합될 수 있다. 이와 관련하여, 더 큰 선택성은 파이프(28a) 상의 상류 피스톤(1902)에 대한 선택된 상 차이 및 피스톤(1904)의 무진동으로 하류 피스톤(1906)을 작동시킴으로써 성취될 수 있다. 가장 바람직하게는, 진동 패턴의 마디가 파이프(28a 및 28b) 사이의 결합점과 일치하는 경우 샘플 확대는 파이프(28b) 상에서 최소화(또는 가능하게는 제거)될 것이며 선택적 샘플 확대는 파이프(28a)의 길이를 따라 성취될 수 있다.
이해될 것과 같이 도 18 및 19와 관련하여 기술된 더블-엔디드 샘플 진동 기술은 또한 다른 형태의 기류 이동 장치, 예를 들어, 벨로우, 팬(도 15에 예시) 등으로 실행될 수 있다.
도 17 내지 19의 시스템은 위치측정 하드웨어가 상기한 모듈(2004)과 같은 탐지기-종료 모듈이 제공되도록 실행될 수 있다. 이해될 것과 같이 이것은 상류 구성요소(예를 들어, 피스톤(1702, 1804, 1902))의 위치가 파이프(28)의 하류 말단에 물리적으로 가깝게 하여 모듈에 함께 수용될 수 있도록 리턴 파이프 부분의 사용을 필요로 할 수 있다.
비록 정화 단계는 도 15b의 실시예와 관련하여서만 기술되지만, 위치측정의 정확성을 향상하기 위해서 정화 단계는 선택적으로 본 발명에 기술된 모든 실시태양에서 사용될 수 있다는 것을 이해될 것이다. 일반적으로 말해서 정화 단계는 공기 샘플링 네트워크에 깨끗한 공기(또는 적어도 샘플 공기와 구별될 수 있는 공기)를 채우는 단계를 필요로 하며, 이는 통상적으로 상기 공기를 제공하기 위한 수단, 예를 들어, 깨끗한 공기의 전달을 가능하도록 시스템 속에 선택적으로 삽입할 수 있는 필터 장치를 필요로 할 것이다. 따라서, 적용가능한 경우 이런 수단이 본 발명에 기술된 시스템에 제공될 수 있다.
상기한 것으로부터 이해될 것과 같이, 중앙 탐지기 및 공기 샘플링 시스템의 덕트 또는 파이프를 따라 위치된 복수의 샘플 입구를 포함하는 흡입 입자 탐지 시스템에서 위치지정을 개선하기 위한 여러 기술이 본 문헌 내에서 기술되었다. 시스템의 각각의 요소들은 결합되어 시스템 성능을 추가로 향상시킬 수 있다는 것이 당업자에게 명백할 것이다. 한 실시예를 제공하기 위해서, 더 깨끗한 연기 농도 전선을 도 5 및 6과 관련하여 기술된 상호-연관 방법에서 사용하기 위한 탐지기에 전달하기 위해 도 14, 15 또는 16의 파이프 네트워크 작업 시스템이 파이프 네트워크 내의 연기 농도를 증가시키는데 사용될 수 있다. 또한, 시간 기반 연관을 사용하는 대신에, 부피 기반 연관이 상기한 대로 사용될 수 있다. 다른 조합은 당업자가 쉽게 알게 될 것이다.
비록 연기의 탐지와 관련하여 기술되었지만, 본 발명은 기체, 먼지, 증기 또는 생물학적 물질을 포함하는 샘플링 시스템에 의해 유용하게 탐지될 수 있는 임의의 다른 물질에 동일하게 적용될 수 있다는 것을 알게 될 것이다.
도 30은 본 발명에 예시된 실시태양 중 임의의 하나에서 위치측정 모듈(2004)로서 사용될 수 있는 위치측정 모듈(3000)의 다른 실시태양을 예시한다. 위치측정 모듈(3000)은 다음 주요 요소를 포함한다:
주요 흐름 통로(3002)는 한 말단의 샘플링 파이프(28)(위치측정 모듈(3000)에 가까운 입구(3004))로부터 다른 말단의 탐지기(11)(위치측정 모듈(3000)로부터 먼 입구(3006))까지 연장된다. 주요 흐름 통로(3002)는 추가의 입자 탐지기(3010)를 포함한다. 입자 탐지기(3010)는 주요 입자 탐지 챔버(14)와 동일하거나 다른 입자 탐지 챔버일 수 있거나 다른 형태의 입자 탐지 챔버일 수 있다. 한 바람직한 형태에서 제 2 입자 탐지기는 주요 탐지 챔버(14)보다 입자에 더 빠른 반응을 제공하는데 이는 비록 모든 실시태양에 필요한 것은 아니다. 주요 흐름 통로(3002)는 또한 주요 흐름 통로(3002)를 봉쇄하고 모든 흐름을 제 1 가지 흐름 통로(3014) 속으로 전환하도록 사용될 수 있는 밸브(3012)를 포함하며, 이하에서 더욱 상세하게 기술된다.
주요 가지 흐름 통로(3014)는 샘플 확대 장치(3018)에 이어지는 제 1 가지(3016)를 포함한다. 한 바람직한 형태에서 샘플 확대 장치(3018)는 샘플링 파이프 내에서 소량이 공기를 밀고 당기기를 빠르게 전환하는데 사용될 수 있는 왕복 피스톤 형태를 가진다. 주요 가지 흐름 통로(3014)는 피스톤에 대한 접근을 봉쇄하여 제 1 가지 흐름 통로(3014)로부터의 흐름을 제 2 가지 흐름 통로(3022) 속으로 전환하는데 사용될 수 있는 제 2 밸브(3020)를 포함한다.
제 2 가지 흐름 통로(3022)는 아래 기술된 방식으로 시스템 외부로부터 제 2 가지 흐름 통로(3022) 속으로 공기가 끌어당겨지게 하고, 공기를 여과하고 이를 추가 입자 탐지기(3010)에 전달하도록 배열된 팬(3024) 및 필터(3026)를 포함한다.
도 31은 여러 공기 샘플링 파이프(28.2, 28.2)를 가진 공기 샘플링 네트워크(26)와 작동하도록 연장된 위치측정 모듈(2004)을 예시한다. 위치측정 모듈(2004)은 상기한 구성요소를 2배로 함으로써 여러 샘플링 파이프를 처리하도록 연장될 수 있다. 그러나 부품 수, 제품 비용을 줄이기 위해서, 특정 구성요소는 공유될 수 있다. 이 실시태양에서 독립적 주요 흐름 통로(3002.1 및 3002.2)가 제공된다. 이 경우 밸브(3012.1 및 3012.2)는 함께 작동하고 주요 가지 흐름 통로의 개별 가지에 연결되어 서로 협력하여 작동된다. 대부분의 다중-파이프 시스템, 예를 들어, 베스다 레이저 스캐너 또는 베스다 레이저 인더스트리얼(둘 다 Xtralis Pty Ltd에 의해 판매)에서, 주요 입자 탐지기는 여전히 하나의 탐지 챔버를 가지며 파이프의 각각으로부터의 공기 샘플은 탐지 챔버에서 분석 이전 매니폴드에 함께 혼합된다.
모든 다른 양태에서 다중파이프 위치측정 모듈은 도 30의 모듈과 동일하며 일치하는 도면부호가 사용되었다. 이해될 것과 같이 다중파이프 위치측정 모듈은 필요한 임의의 수의 샘플링 파이프를 다루도록 제조될 수 있다.
도 32 및 33은 보조장치(2800)의 2개의 추가 실시태양을 예시한다. 보조장치(2800)는 샘플링 파이프(28)의 먼 상류 말단에 장착된 파이프 말단-캡으로 사용될 수 있다. 그러나 보조장치는 샘플링 네트워크의 다른 지점, 예를 들어, 가지 파이프의 상류 말단에 또는 샘플링 파이프의 중간 지점의 T 접합점 앞에 위치될 수 있어서, 보조 흐름 통로의 선택적 개방이 공기를 샘플링 파이프 속으로 흘러가게 한다. 도 32의 실시태양은 위치측정 모듈의 제어하에서 활성화될 수 있는 팬(3202) 및 밸브(3204)(도 28의 밸브(2808)와 동일)를 가진다. 정상적인 연기 탐지 작동시에 밸브(3204)는 밀폐되고 팬(3202)은 작동하지 않는다. 활성화될 때, 밸브(3204)는 개발되고 팬(3202)가 활성화되어 공기가 파이프(28)의 말단 속으로 끌어당겨지고 탐지기(11)를 향해 샘플링 파이프를 아래로 보내진다. 보조장치(2800)는 또한 선택적으로 HEPA 필터와 같은 필터를 포함할 수 있어서 파이프에 출입하는 공기가 샘플링 지점으로부터 시스템 속에 끌어당겨진 샘플 공기와 더욱 잘 구별될 수 있게 된다.
도 33의 보조장치(2800)는 도 28의 실시태양과 매우 유사하며 유사한 형태는 유사하게 번호를 매겼다. 보조장치는 파이프를 선택적으로 개방하나 팬을 개방하지 않을 수 있는 밸브(2808)를 포함한다. 보조장치는 또한 필터(3302)를 포함한다. 밸브(2808)는 샘플링 파이프(28)에서 저압 또는 역 흐름을 감지하자마자 컨트롤러(2806)에 의해 작동된다. 높은 음압이 탐지되면, 말단 캡이 개방되어 공기가 파이프의 말단 속으로 끌어당게 지게 한다.
사용시에 한 바람직한 실시태양에서 도 30 및 31의 각각에 예시된 형태의 위치측정 모듈 및 도 32 또는 33의 각각에 예시된 보조장치를 사용하는 입자 탐지 시스템은 주요 입자 탐지기, 위치측정 모듈(2004), 샘플링 파이프(28)를 가진 샘플링 네트워크(26) 및 위치측정 모듈의 상류에 장착된 적어도 하나의 보조장치를 가진 도 29와 같은 다른 실시태양에서 도시되는 것과 동일한 일반적 구조를 가질 것이다. 이런 시스템의 작동은 도 32의 보조장치의 사용을 가정하여 기술될 것이다.
개략적으로, 탐지기(11)는 공기 샘플을 끌어당기고 이를 연속적으로 분석하는 정상 입자 모드로 작동한다. 그러나 일단 입자가 소량 수준 이상으로 탐지되면 시스템은 위치측정 모드가 되며 위치측정 모듈(2004)을 활성화한다. 그런 후에 주요 탐지기(11)가 불활성화되고 공기 샘플은 주요 탐지기(11)를 통해 끌어당겨지는 것이 중지된다. 그런 후에 위치측정 모듈(2004)은 상기한 대로 샘플 확대 과정을 실행한다. 상기한 대로 "확대"는 파이프의 공기를 각 샘플 구멍 근처의 국소 분위기와 혼합하고 각 샘플링 구멍에 인접한 샘플링 파이프의 공기 패킷이 형성되게 하며 - 이런 패킷은 샘플링 지점 바로 근처의 대기와 유사한 조성물을 가진다. 상기한 것으로부터 명백하게 될 것과 같이, 정상 상태 작동에서 각 샘플링 구멍을 통해 끌어당겨진 공기 샘플은 공기가 샘플링 네트워크(26)를 통해 통과함에 따라 모든 다른 샘플링 구멍 속으로 끌어당겨진 공기에 의해 희석된다. 그러나, 이 실시태양에서, 확대는 시스템의 앞뒤로 소량의 공기를 흡입하고 내보내기 때문에 패킷은 이런 방식으로 희석되지 않는다.
그런 후에 "패킷"을 가진 샘플링 파이프의 내용물은 주요 탐지기의 주요 팬을 재활성화하고 팬을 가진 보조장치가 사용되는 경우(예를 들어, 도 32의 보조장치) 이를 보조장치의 팬으로 밀어냄으로써 분석을 위해 추가 입자 탐지기(3010)로 다시 끌어당겨진다. "수송" 과정 동안 부피(또는 관련 값)가 측정된다. 추가 입자 탐지기(3010)가 연기의 패킷을 탐지할 때, 끌어당겨진 부피는 판독되고 룩업 테이블과 비교되어 어느 샘플링 구멍이 탐지된 연기 패킷과 일치하는 지를 측정한다.
보조 가지 흐름 통로는 이런 위치측정 과정에 어떤 부분적인 역할도 하지 않는다. 그러나, 교정을 위해 추가 입자 탐지기(3010)를 깨끗한 공기로 채우기 위해서만 사용된다.
표로 산출된 형태에서 과정은 다음과 같이 나타내어질 수 있다:
정상 작동

밸브 3012의 경우
개방 = 주요 흐름 통로가 개방되고 주요 가지 흐름 통로가 밀폐된다
밀폐 = 주요 흐름 통로가 밀폐되고 주요 가지 흐름 통로가 개방된다
밸브 3020의 경우
개방 = 주요 흐름 통로가 개방되어 샘플링 파이프가 확대기에 개방된다
밀폐 = 제 2 가지 흐름 통로가 개방되어 샘플링 파이프가 팬과 필터에 개방된다
소량 수준의 연기가 주요 탐지 챔버에 의해 탐지된 경우 정상 탐지가 종료되고 확대 모드에 들어간다.
확대
이 상태에서 위치측정 모듈(2004)은 확대 모드에 들어가고 이 실시예에서 샘플 확대 장치, 예를 들어, 피스톤(3018)은 공기를 반복적으로 끌어당기고 밀어서 샘플 확대를 실행한다. 이 과정에서 이동된 공기의 부피는 공기 샘플링 시스템의 공기의 전체 부피와 비교하여 낮고 바람직하게는 이웃 샘플링 입구 사이의 샘플링 파이프의 부피의 절반 미만이다.

소정의 시간 또는 진동 수 후, 확대는 감소되며 시스템은 수송 모드로 이동한다.
수송
이 모드에서 시스템은 확대된 샘플 패킷을 분석을 위해 추가 입자 탐지기(3010)에 다시 이동시킨다. 수송이 시작된 후 시스템을 통해 통과된 샘플 공기의 부피 또는 부피 관련 값은, 예를 들어, 유속을 적분함으로써 측정된다. 이값은 추가 입자 탐지기(3010)에서 탐지 사건과 연관되어 연기의 출입지점을 측정한다.
본 발명의 다른 곳에서 언급한 대로, 수송은 고속으로 이루어지는 것이 바람직하다. 이것은 예를 들어 밸브(3204)를 개방하고 (존재하는 경우) 푸셔 팬(3202)을 활성화함으로써 샘플링 파이프 속으로 큰 포트를 개방함으로써 촉진된다. 파이프(28)의 말단을 개방하고 파이프의 말단 속으로 보내면 파이프의 적어도 일부(팬(3202)에 가장 가까운 부분)에 양압을 일으키고 시스템의 주요 흡입기에 더 가깝게 음압을 최소화한다(흡입을 감소시킨다). 이것이 샘플링 파이프의 샘플링 입구에서 흡입을 최소화하며 결과적으로 수송 동안 샘플링 입구 속으로 추가 공기의 끌어당김을 최소화하여, 샘플 패킷이 분석을 위해 입자 탐지기로 보내짐에 따라 샘플 패킷의 희석을 최소화한다.
수송은 또한 바람직하게는 샘플링 파이프에서 난류를 보장하는 충분히 높은 속도에서 실행되어, 파이프를 따라 패킷의 퍼짐을 최소화한다는 것이다(본 발명의 다른 곳에서 기술). 수송 동안 고속의 뒤로 끌어당김의 추가 이점은 샘플링 파이프(28)의 먼 말단으로부터 더 빠른 반응을 가능하게 하는 탐지기(들)까지 패킷의 수송 시간을 감소시킨다는 것이다.

수송이 완료된 후, 시스템은 정상 작동으로 되돌아간다.
과정은 순환될 수 있어서 위치측정 데이터를 주기적으로 업데이트하고 또한 연기 발생을 관찰한다.
제 2 가지 흐름 통로(3022)의 사용
상기 설명에 의해 이해될 것과 같이, 보조 가지 흐름 통로(3022)는 정상적인 탐지, 확대 또는 수송 단계에서 역할을 하지 않는다. 보조 가지 흐름 통로의 주요 용도는 정기적으로 또는 필요할 때 주요 탐지 챔버(14) 또는 추가 입자 탐지기(3010)의 하나 또는 둘 다를 교정하거나 제로 눈금에 맞추는데 사용될 수 있는 깨끗한 공기의 원료를 제공하는 것이다. 이것은 제로잉 모드로 들어가면서 실행되는데 여과된 공기는 적어도 추가 입자 탐지기(3010)가 깨끗한, 여과 공기로 채워질 때까지 제 2 가지 흐름 통로를 통해 주요 흐름 통로 속으로 다시 보내진다. 제로잉 단계에서 시스템 구성은 다음과 같다:

추가 입자 탐지기(3010)를 채우기 위해 충분히 깨끗한 공기를 위치측정 모듈(2004) 속에 보내는 것만이 필요하다. 이것은, 예를 들어, 허용가능한 부피의 깨끗한 공기를 시스템 속에 보내는데 충분한 소정의 시간 동안 팬(3024)을 작동시킴으로써 실행될 수 있다. 선택적으로 깨끗한 공기는 상대적으로 일정한 최소 입자 치수가 추가 입자 탐지기(3010)에 의해 탐지될 때까지 추가 입자 탐지기(3010) 속으로 되돌려 보내질 수 있다.
다른 실시태양에서 적어도 하나의 공기 샘플링 파이프 및 복수의 공기 샘플링 지점을 포함하는 샘플링 네트워크와 유체를 전달하는 입자 탐지기를 가진 입자 탐지 시스템을 위한 방법이 제공된다. 상기 방법은 일반적으로 복수의 공기 샘플링 입구를 가진 적어도 하나의 공기 샘플링 파이프를 입자 탐지 시스템에 의해 탐지될 수 있는 교정 물질(예를 들어, 테스트 연기 또는 FM2000 등과 같은 입자 탐지기에 의해 탐지될 수 있는 다른 물질)로 채우는 것을 필요로 하며, 상기 공기 샘플링 파이프는 입자 탐지 시스템에 의해 탐지가능한 수준에서 상기 물질로 채워진다. 다음 상기 방법은 적어도 하나의 공기 샘플링 입구 근처의 물질의 국소 희석을 유발하도록 샘플링 파이프 속으로 공기 샘플을 끌어당기는 것을 필요로 한다. 바람직하게는 희석 과정은 샘플링 파이프에서 흐름 방향을 변화시키는 것을 필요로 한다. 가장 바람직하게는 희석 과정은 본 발명의 다른 곳에서 기술한 대로 샘플 확대와 유사하다. 샘플링 시스템의 내용물은 탐지기로 이동되어 공기 샘플링 시스템의 내용물에서 교정 물질의 수준을 탐지하면서 샘플링 시스템의 내용물의 이동과 연관할 수 있는 양(예를 들어, 부피, 부피 관련 값, 또는 시간(비록 이것이 바람직하지는 않다))을 관찰한다. 샘플링 파이프의 내용물에서 물질의 상기 국소 희석을 탐지하고 이런 탐지를 관찰된 양과 상호관련하면 국소 희석을 일으킨 샘플링 구멍에 해당하는 상기 양의 부피를 측정한다. 샘플링 파이프의 내용물에서 물질의 상기 국소 희석을 탐지하는 것은 시스템의 입자 탐지기에 의한 입자 수준의 감소를 탐지하는 것을 포함한다.
본 방법은 커미셔닝 과정의 일부를 형성할 수 있고 본질적으로 샘플의 패킷을 형성하기 위해 샘플을 확대하는 것을 대신 물질이 든(예를 들어, 연기가 채워진) 샘플링 파이프는 "확대" 과정에 의해 그 안에 형성된 희석된 패킷을 가지는 한 통상적인 위치측정 기술의 정반대이다. 전체 파이프는 동시에 여러 번 교정 물질로 채워질 수 있고 물리적으로 분리된 희석 패킷이 동시에 형성될 수 있기 때문에, 동시에 매우 큰 수의 샘플링 구멍의 교정이 실행될 수 있다.
이런 시스템을 실행하기 위해서, 샘플링 파이프를 채우는 방법은 샘플링 입구를 통해 수동일 수 있거나 더욱 바람직하게는 샘플링 네트워크는 마개(예를 들어, 보조장치(2800) 또는 위치측정 모듈(2004)의 일부)와 같은 입구로 끼워질 수 있다. 바람직하게는 후자가 더 편한데 이는 여러 파이프 실시태양에서 모든 파이프가 한 번에 교정될 수 있기 때문이다. 입구는 대략 조절된 출력량을 가진 교정 물질의 공급원과 유체를 전달한다. 교정 물질의 공급원은 교정 동안 일시적으로 또는 영구적으로 입구에 연결될 수 있고 주기적 교정과 자가 테스트를 가능하게 한다.
도 34는 본 발명의 또 다른 실시태양을 실행하는 입자 탐지 시스템을 예시한다. 이 실시태양에서, 시스템(3400)은 입자 탐지기(11) 및 국소화 모듈(2004)을 포함한다. 그러나, 본 발명에 기술된 다른 실시태양과 함께, 국소화 모듈은 입자 탐지기(11) 속에 통합될 수 있거나 입자 탐지기(11)의 구성요소에 의해 실행된 기능을 가진다.
이 실시예에서, 공기 샘플은 샘플링 파이프(또는 파이프)(28)를 포함하는 샘플링 네트워크(26)를 통해 입자 탐지기(11)에 전달된다. 샘플링 파이프 또는 파이프는 길이를 따라 이격된 샘플링 입구(29)를 포함한다. 샘플링 파이프(28)의 상류 말단은 대기에 개방될 수 있고, 말단 캡에 의해 밀폐 또는 부분적으로 밀폐될 수 있다. 도 34에 예시된 실시태양에서, 파이프(28)의 말단은 기류를 허용하나 바람직하게는 HEPA 필터인 필터(3402)를 포함한다. 필터(3402)는 샘플링 파이프의 말단 속에 끌어당겨진 임의의 공기를 세정하여 입자가 파이프(28)의 말단에 들어가지 않는다(예를 들어, 연기). 본 실시태양에서, 국소화 모듈은 상기한 대로 샘플 확대를 실행하는데 필요하다. 특히 바람직한 실시태양에서, 국소화 모듈(2004)은 도 30에 예시된 형태의 모듈이거나 유사한 또는 이에 기능적으로 동일한 구성요소를 포함한다. 이해될 것과 같이, 여러 샘플링 파이프(28)를 가진 실시태양은 도 31과 관련하여 기술된 것과 유사한 또는 유사한 방식으로 국소화 모듈을 사용하여 실행될 수 있다.
도 34의 시스템은 다음과 같이 공기 샘플링 네트워크(26) 속에 입자의 출입 지점을 결정하는데 다음과 같이 사용될 수 있다:
정상 작동
정상 작동 동안, 공기 샘플은 탐지기 팬, 펌프 또는 다른 공기 이동 장치에 의해 샘플링 입구 속에 및 탐지기에 끌어당겨진다. 탐지기(11)는 공기 샘플링 네트워크(26)를 통해 끌어당겨진 공기 샘플을 분석하기 위해 고 민감성 입자 탐지기 챔버를 사용하는 통상적인 방식으로 작동된다. 탐지기(11)가 이를 통과하는 샘플 공기에서, 입자, 예를 들어, 연기의 존재를 탐지하면, 시스템(3400)은 샘플 확대 단계에 들어간다.
확대 단계
확대 단계에서, 국소화 모듈(2004)은 상기한 대로 샘플링 네트워크(26) 내의 흐름을 진동시킴으로써 샘플 확대를 실행한다. 확대 동안 이전 실시태양에 논의한 것과 같이 공기는 탐지기(11)를 통해 끌어 당겨지지 않거나 매우 느린 속도로 끌어 당겨진다. 이것은 공기 샘플링 입구(29)의 각각을 둘러싸는 또는 각각에 인접한 연기 "패킷"을 형성한다. 그런 후에 시스템은 수송 단계에 들어간다.
수송 단계
수송 단계에서 샘플은 다시 탐지기(11) 또는 프로파일러(예를 들어, 도 30에서 국소화 모듈(3000)의 프로파일러(3010)) 속에 다시 끌어당겨지며 연기 프로파일이 측정된다. 상기 설명으로부터 이해될 것과 같이, 수송 단계 동안 시간 변화 입자 농도 프로파일은 탐지 챔버 또는 프로파일러에 의해 감지되어야 한다. 입자 농도 프로파일은 연기가 샘플링 시스템(26)에 들어가는 각 샘플 구멍(29)으로부터의 샘플 "패킷"에 상응하는 입자 농도의 피크를 함유할 것이다. 시간 또는 부피(또는 다른 관련 변수)를 수송 단계 동안 기록된 프로파일과 서로 연관시킴으로써 시스템은 어느 샘플링 입구(29)를 통해 탐지된 샘플 패킷은 샘플링 네트워크(26)에 들어갔는지를 결정할 수 있다. 탐지기(및/또는 국소화 모듈)는, 예를 들어, 화재 경고 시스템, FACP 등에 대한 입자의 탐지 위치를 표시한다. 상기한 대로, 연기가 통과하여 시스템에 들어간 샘플링 입구에 해당하는 실제 물리적 위치가 또한 표시될 수 있다.
그런 후에 시스템은 상기한 대로 정상 작동 모드로 되돌아간다. 이런 사이클은, 선택적으로 지연 기간이 만료된 후, 탐지기(11)가 정상 작동에서 입자를 탐지하는 경우 반복될 수 있다.
도 34의 실시태양에서, 정확도의 증가는 공기 샘플링 파이프(28)의 말단 상에 HEPA 필터(3402)를 제공함으로써 얻어질 수 있다. HEPA 필터(3402)의 존재는 연기 샘플이 샘플링 파이프의 말단 속으로 끌어당겨지지 않아 샘플링 구멍(29)의 각각을 통해 수신된 연기 리딩을 보이지 않게 하는 것을 보장한다. 또한, 최종 샘플링 구멍(29A)은 파이프(3404)의 말단으로부터 비교적 먼 거리 떨어져 있는 것이 바람직하다. 일부 실시태양에서 최종 샘플링 구멍(29A)과 파이프(3404)의 말단 사이의 거리는 약 5미터 또는 10미터 또는 10미터 초과일 수 있다.
일부 실시태양에서, 도 34에 예시된 시스템은 흡입된 연기 탐지기 시스템이며 입자 탐지기(11)는 연기 탐지기이다.
도 35는 도 34의 실시태양에 대한 변형을 예시한다. 설명을 단순화하기 위해서, 유사 구성요소는 유사하게 번호를 매겼고 다시 설명되지 않을 것이다. 도 35의 실시태양은 최종 샘플링 구멍(29A)의 위치 위에 샘플링 파이프(28)에 밸브(3406)의 포함에 의해 도 34의 것과 다른 시스템(3500)을 예시한다. 밸브(3406)는 바람직하게는 공기 압력의 샘플링 파이프(28)에 대한 적용에 의해 밀폐될 수 있는 형태의 한 방향 밸브이다. 예를 들어, 주요 탐지기(11)의 흡입기, 또는 다른 펌프, 팬, 송풍기 등을 사용하여, 샘플링 파이프(28) 속에 불어넣음으로써 파이프(28) 내에 압력이 제공될 수 있다. 도 34와 연결하여 기술된 정상 작동 동안, 밸브(3406)는 개방된 상태이며 공기는 파이프(28)의 말단(3404) 속으로 자유롭게 흐르며 시스템(3500)은 시스템(3400)과 동일한 방식으로 작동된다. 그러나, 밸브(3404)의 존재는 샘플링 파이프 네트워크가 정확한 작동에 대해 테스트된, 예를 들어, 완전히 또는 부분적으로 차단된 샘플링 입구(29) 파괴 파이프 등에 대해 테스트되게 한다.
따라서 본 발명의 추가 양태에 따라, 샘플링 파이프 네트워크의 정확한 성능, 예를 들어, 입자 탐지 시스템에서 샘플링 파이프 네트워크에서 하나 이상의 샘플 입구의 봉쇄를 측정하는 방법이 제공된다. 상기 방법은 공기를 샘플링 파이프 네트워크 속에 불어넣는 단계 및 불어넣은 공기가 샘플링 파이프 네트워크에서 샘플링 입구를 통해 배출됨에 따라 파이프 네트워크를 통과하는 공기의 유속 또는 압력을 측정하는 단계를 포함한다. 측정된 유속 또는 압력은 소정의 값과 비교될 수 있고 측정된 값은 설정량 이상만큼 소정의 값과 차이가 나는 경우 결함이 표시될 수 있다. 공기는 공기 샘플링 지점의 하나 이상의 상류, 하류 또는 중간인 임의의 지점으로부터 공기 샘플링 네트워크 속에 불어 넣어질 수 있다. 가장 바람직하게는, 테스트된 공기 샘플링 파이프의 단편은, 예를 들어, 샘플링 입구를 제외한 임의의 다른 경로를 통해 샘플링 네트워크의 단편을 빠져나오는 기류를 봉쇄함으로써, 시스템에서 이웃하는 구성요소로부터 분리된다.
가장 바람직한 형태에서, 공기를 가진 공기 샘플링 네트워크의 일부는 공기 샘플링 네트워크의 "탐지기 말단"으로부터 공기 샘플링 네트워크 일부 속으로 불어넣어진다. 일부 실시태양에서 상기 방법은 공기 샘플링 네트워크에 있는 구멍을 테스트 또는 밀폐할 수 있는 공기 샘플링 네트워크의 일부를 분리하는 단계를 포함할 수 있다. 가장 바람직하게는 상기 방법은 테스트 중인 공기 샘플링 네트워크의 일부의 말단에 밸브를 밀폐하는 단계를 포함한다. 예시된 실시태양에서, "탐지기 말단"으로부터 먼 위치에 있는 샘플링 파이프(28)에 위치된 밸브(3406)는 흐름의 측정을 시작하기 전에 밀폐되며, 탐지기의 팬은 파이프(28) 속에 공기를 불어넣는데 사용된다. 탐지기의 흐름 센서는 이런 방법을 실행하기 위해 샘플링 구멍의 밖으로의 흐름을 측정하는데 사용될 수 있다.
이해될 것과 같이, 상기 방법을 사용하여 테스팅 동안 공기 샘플링 시스템의 일부를 통과하는 측정된 유속은 저장된 값과 비교될 수 있다(예를 들어 설정 또는 교정 과정을 통해 측정된, 커미셔닝 동안 들어간, 제조사에 의해 지시된 미리 설정된 값; 이전에 측정된 값으로부터 유래된 저장된 값). 유속이 저장된 값을 기초로 한 허용가능한 범위에서 벗어나는 경우, 결함 신호 등과 같은 신호는 결함 상태가 존재한다는 것을 표시하도록 발생될 수 있다. 이해될 것과 같이, 기술된 공기 샘플링 시스템을 테스팅하는 방법은 일부 무광택 재료, 예를 들어, 누적된 먼지, 오물 등이 테스팅 공정 동안 공기 샘플링 구멍 밖으로 빠져나올 수 있어서 존재하는 임의의 봉쇄를 효과적으로 세정하거나 부분적으로 완화시키는 잠재적 이점을 가진다.
본 발명의 다른 바람직한 양태는 도 36-43에 예시된다. 도 36은 입자 또는 기체 탐지 시스템의 입자 탐지기(511)를 도시한다. 이 실시태양에서 탐지기는 연기 탐지기 형태의 입자 탐지기(511)이다. 탐지기(511)는 샘플링 네트워크(513)와 유체를 전달한다. 샘플링 네트워크(513)는 예를 들어, 도 37 또는 38에 도시된 형태를 가질 수 있다. 이런 샘플링 네트워크의 구성은 이하에서 추가로 논의될 것이다.
흡입기(515)는 입구(517)를 통해 샘플링 네트워크(513) 속에 및 입자 탐지 챔버(519) 속으로 따라 공기를 끌어당긴다. 공기 샘플은 출구(521)를 통해 탐지 시스템을 빠져나간다.
탐지기(511)는 흐름 센서(523)를 포함한다. 본 발명의 한 바람직한 실시태양에서, WO 2004/102499에 기술된 초음파 흐름 센서가 사용된다. 이런 센서는 체적 유량 측정이 이루어지게 한다. 흐름 센서(523)는 단위 시간당 샘플링 네트워크(513)로부터 입자 탐지기(511) 속으로 흐르는 공기의 부피의 표시를 제공한다. 흐름 센서(523)의 출력은, 예를 들어, 언제 흐름 결함, 예를 들어, 샘플링 네트워크(513) 또는 감소된 흡입기 성능의 봉쇄가 일어났는지를 추론하는데 사용될 수 있다.
입자 탐지기(511)는 또한 탐지기(519)의 출력을 기초로 한 공기 샘플에 입자의 수준을 측정하기 위한 컨트롤러(525)를 포함하며 탐지기 출력에 대한 경고 및/또는 결함 로직을 인가하여, 입자의 존재 및 시스템의 작동 상태에 대해 사용자에게 경고하게 한다. Xtralis Pty Ltd로부터의 베스다 또는 ICAM 연기 탐지기의 전형적인 장치는 이런 형태의 시스템의 한 예일 수 있다.
도 37을 참조하면 매니폴드(553)에 유동적으로 연결된 복수의 샘플링 파이프(551)를 포함하는 멀티-채널 샘플링 네트워크(513)가 예시된다. 매니폴드(551)에서 출구 포트(555)는 매니폴드(553)로부터 입자 탐지기(511)로부터 기류를 탐지한다. 명확함을 위해서 탐지기(511)의 내부 구성요소는 도시되지 않았으나, 도 36와 관련하여 기술된다. 회전 밸브(554)는 샘플링 파이프(551)의 각각을 매니폴드(553)에 선택적으로 연결하는데 사용될 수 있다. 이런 탐지기 및 회전 밸브 셋업의 한 예는 Xtralis에 의해 ICAM IFT-15 연기 탐지기에서 발견될 수 있다. 각 샘플링 파이프(551)는 아래 더욱 상세하게 기술될 개별 샘플링 입구(510)를 통해 외부 환경과 유체를 전달하게 연결된다.
샘플링 네트워크의 다른 구성은 도 38에 예시된다. 도 37과 같이 도시된 샘플링 네트워크(513)는 복수의 샘플링 파이프(551)를 포함한다. 이런 실시태양에서 샘플링 파이프(551)의 각각은 샘플링 파이프(551)의 전부로부터 탐지기(511)로의 기류를 탐지하는 주요 샘플링 파이프(550)에 유동적으로 연결된다. 도 37과 같이, 각 샘플링 파이프(551)는 개별 샘플링 입구(510)를 통해 외부 환경과 유체를 전달하게 연결된다. 이런 실시태양에서 추가 흐름 또는 압력 센서(557)는 하기한 대로 각 샘플링 입구(510)에 인접하거나 각 샘플링 입구(510) 내의 각 샘플링 파이프(551) 내에 제공될 수 있다.
도 39 내지 42를 참조하면 연기 및/또는 기체 샘플링 시스템의 샘플링 입구(510)가 예시된다. 샘플링 입구(510)는 루프 타일, 천장 또는 다른 벌크헤드(514)에 통상적으로 설치된 하우징(512)을 포함한다. 하우징(512)은 일반적으로 원통이며 공기 입구(516) 및 공기 출구(518)를 포함한다. 공기 입구(516)는 주변 환경에 개방되며 샘플 공기가 샘플링 입구(510) 안으로 및 통과하여 공기 출구(518)로 끌어당겨지게 한다. 공기 출구(518)는 샘플 공기를 탐지기(511)로 향하게 하는 샘플링 파이프(551)에 연결된다.
샘플링 입구(510)는 공기 입구(516)와 공기 출구(518) 사이에 있는 벽(522)에 의해 형성된 중앙 챔버(520)를 포함한다. 공기 출구(518)의 하부 말단은 도 3에 가장 잘 도시된 대로 챔버(520)의 상부까지 연장된다. 공기 출구(518)의 하부 말단(524)은 하우징(512)의 벽(526)에 의해 둘러싸인다. 벽(526)은 공기 출구(518)로부터 방사상으로 이격되어 이하에서 추가로 논의될 것과 같이 홈(528)을 형성한다.
챔버(520)는 도 39에 도시된 정상 작동 위치와 도 40에 도시된 밀폐 위치를 통과하는, 도 41에 도시된 작동된 위치 사이에서 이동가능한 일반적으로 원통 셔틀(530)을 수용한다. 셔틀은 하기한 대로 샘플링 입구(510) 내의 흐름 변형 장치로서 작동된다. 이 경우는 밸브로서 작동하며, 2개의 개방 위치를 가지며 그 사이에 밀폐된 위치를 가진다. 셔틀(530)은 공기의 통과를 허용하는 하나 이상의 구멍(534)을 포함하는 외부 원통벽(532)을 가진다. 셔틀(530)의 상부 말단(536)은 셔틀은 정상적인 작동 위치에 있을 때 홈(528)에 수용되도록 만들어진다. 공기 출구(518)의 하부 말단(524)은 셔틀(530)의 랜딩(537)에 의해 기밀한 밀봉을 형성한다.
셔틀(530)의 하부 말단(524)은 원통벽(539)에 의해 둘러싸이고 원통벽(539) 내에 지지된다.
셔틀(530)의 하부 말단(538)은 벽(532)의 내부로 방사상으로 이격된 추가벽(540)을 포함하여 추가 홈(542)을 형성한다.
셔틀(530)은 셔틀(530)이 장착되는 스프링(544)에 의해 정상적인, 작동 위치 속으로 편향된다. 스프링(544)의 상부 말단(546)은 홈(542) 내에 수용되면서, 스프링(544)의 하부 말단(548)은 챔버(520)의 기부(550)에 연결된다. 도 41에 도시된 대로, 셔틀(530)이 작동된 위치에 있을 때 스프링(544)이 압축된다.
공기 샘플링 시스템의 정상 작동시에, 공기는 부압하에서 흡입기에 의해 샘플링 입구(510) 속으로 공기 입구(516)를 통해 챔버(520) 속으로 끌어당겨진다. 그런 후에 샘플 공기는 구멍(534A)을 통해 벽(539) 내로 그리고 이 위치에서 구멍(534A)과 정렬되는 구멍(534) 속으로 끌어당겨진다. 따라서 공기는 셔틀(530)의 내부 속으로 끌어당겨지며 공기 출구(518)를 통해 직접 샘플링 파이프(551) 및 탐지기(511)로 끌어당겨진다. 이런 제 1 흐름 통로는 도 43a에 예시된다. 입자 탐지기(511)의 흐름 센서(523)는 샘플 흐름이 소정의 변수 내에 있는지를 측정하는데 사용될 수 있다. 충분하게 민감한 흐름 센서가 사용되는 경우, 흐름 센서(523)는 하나 이상의 봉쇄된 샘플링 구멍 또는 샘플링 파이프가 존재하는지를 결정하는데 사용될 수 있다. 도 37의 실시예에서, 흐름 제약이 탐지되는 경우, 회전 밸브(554)는 샘플링 파이프(551)를 개별적으로 또는 그룹으로 탐지기에 연결하는데 사용될 수 있어서 어느 파이프 또는 파이프들(551) 또는 이들의 결합된 샘플링 입구(510)가 봉쇄될 수 있는지의 확인을 가능하게 한다.
샘플링 시스템의 작동을 테스트하기 원할 때, 특히 샘플링 파이프(551)의 무결성을 테스트하기 원할 때, 샘플링 파이프(551)에서 기류는 역전된다. 이것은 흡입기(515)를 역전시키거나 기류를 샘플링 파이프(551) 속에 다시 향하게 하는 일련의 밸브를 작동시킴으로써 성취될 수 있어서, 공기는 탐지기 말단으로부터 샘플링 파이프(551) 속으로 불어 넣어진다. 이런 상태에서 양압은 샘플링 네트워크 및 샘플링 입구(510) 내에 형성된다.
도 37에 예시된 실시태양을 참조하면 회전 밸브는 바람직하게는 흡입기(515)로부터 어느 샘플링 파이프(551) 속으로 공기가 불어 넣어지는지를 선택하는데 사용된다. 각 샘플링 파이프는 예를 들어 연속적으로 테스트될 수 있다. 선택적으로 복수의 샘플링 파이프(551)는 흡입기(515)가 복수의(아마도 전부) 샘플링 파이프(551)와 동시에 유체를 전달하게 연결되는 방식으로 회전 밸브(554)를 설정함으로써 동시에 테스트될 수 있다. 이런 동시 테스팅 모드가 최초로 사용될 수 있고, 흐름 결함의 원인을 찾기 위해 뒤이어 더 작은 그룹(또는 개별 파이프)의 순차적 테스팅이 이어질 수 있다.
도 38에 예시된 실시태양과 관련하여 공기는 주요 샘플링 파이프(550) 속과 개별 샘플링 파이프(551) 속으로 불어 넣어진다. 밸브는 샘플링 파이프(551)의 각각을 주요 샘플링 파이프(550)에 선택적으로 연결하도록 제공될 수 있어서, 공기 샘플링 네트워크의 선택된 가지 또는 일부는 분리되고 개별적으로 테스트될 수 있다. 선택적으로, 추가 국소 흐름 또는 압력 센서(557)가 도 38에 예시된 실시태양의 각 샘플링 입구(510)에 인접하거나 각 샘플링 입구(510) 내의 샘플링 파이프(551)의 각각 내에 제공된다. 국소 센서(557)는, 유선 또는 무선 네트워크를 통해, 샘플링 네트워크의 가지에서 기류 또는 압력의 존재 또는 수준을 탐지기(511)에 표시하도록 구성된다. 이것은 주요 흐름 센서(523)를 반드시 변형시키지 않는 샘플링 튜브(551)에서 국소화된 흐름 결함의 탐지를 가능하게 한다.
공기가 샘플링 파이프(551) 속으로 불어 넣어질 때, 공기는 공기 출구(518)를 통해 샘플 입구(510)에 들어간다. 이것은 압력이 샘플링 네트워크에 형성되게 하며, 이는 셔틀(530)이 스프링(544)을 압축하게 하고 셔틀(530)이 아래로 이동하게 한다. 셔틀(530)이 아래로 이동함에 따라, 벽(539)은 셔틀(530)에서 구멍(534)을 봉쇄하여 기류를 정지시킨다. 이런 밀폐된 상태는 도 40에 도시된다. 셔틀은 시스템에서 기압을 소정의 수준으로 유지함으로써 이 위치로 유지될 수 있다.
이 상태에서 테스트하에서 샘플링 파이프 네트워크(513) 또는 일부는 구멍 또는 파괴 또는 샘플링 입구(들)(510)가 밀폐된 작동된 상태에 있을 때 샘플링 네트워크에서 압력의 손실을 가능하게 하는 다른 상태에 대해 테스트될 수 있다. 이 테스트는 여러 방식으로, 예를 들어, 시간에 따른 샘플링 파이프 네트워크에서 압력을 측정하고, 흡입기가 (예를 들어, 팬 속도, 흡입기 또는 임의의 다른 적절한 수단에 대한 전기 부하의 면에서) 소정의 수준에서 압력을 유지하도록 작동될 필요가 있는 속도를 측정하고, (제로 흐름이 파이프 무결성을 나타낼) 테스트하에서 샘플링 파이프 네트워크(513) 또는 일부에서 흐름을 측정함으로써 실행된다.
셔틀(530)이 아래로 더 이동함에 따라 구멍(534)은 다시 개방되고 챔버(520)를 통과하는 기류는 재개된다. 셔틀(530)이 도 41에 도시된 대로 이런 작동된 위치에 있는 상태로, 공기는 구멍(534)의 밖으로 흐른 후에 공기 입구(516)의 밖으로 주변 환경으로 흐른다. 직립 러그(519) 등이 공기 입구(516)의 둘레 근처에 제공되며 셔틀(530)이 공기 입구(516)를 밀봉하는 것을 막는 억제장치로서 작용한다. 이런 제 2 흐름 통로가 도 43b에 예시된다. 샘플링 지점(510)이 이런 작동된 위치에 도달할 때 압력은, 본 실시예에서, 샘플링 지점이 도 40의 밀폐된 작동된 위치에 도달할 때의 압력보다 높을 것이다. 이런 개방된 작동된 위치에서 샘플링 네트워크(513)를 통과하는 역전 흐름은 샘플링 파이프(551)를 씻어내는데 사용될 수 있다. 먼지 또는 솜부스러기와 같은 임의의 무른 재료는 이런 방식으로 샘플링 입구(510)의 밖으로 보내질 수 있다.
일부 실시태양에서 압력은 임계 압력에서 또는 근처에서 샘플링 파이프에서 유지될 수 있고 이 압력에서 셔틀(530)은 최장 이동 지점까지 밀려져서 구멍(534)은 완전히 개방되며, 스프링의 압축은 샘플링 파이프(551)에 불어넣어진 공기에 의해 유발된 아래쪽 압력을 극복할 수 있으며, 이것이 셔틀(530)이 도 39에 도시된 대로 정상 작동 위치쪽으로 다시 위쪽으로 "튀어오르게 한다". 흡입기가 공기를 샘플링 파이프(551) 속으로 불어넣어 다시 임계 압력에 도달할 때, 셔틀(530)은 다시 스프링(544)을 강제로 압축시키고 이의 작동된 개방 위치로 이동시킨다. 이런 과정은 흐름 또는 압력 센서(523)에 의해 탐지된 기류 속도/압력을 효과적으로 조절한다. 기류 속도에 대한 1회 중단은 흐름 또는 압력 센서(523)가 샘플링 입구(510)에서 셔틀(530)의 존재 및 이의 정확한 작동을 확립하는데 충분할 것이다. 기류에 대한 중단이 흐름 센서(523)에 의해 탐지되지 않는 경우 이는 컨트롤러(525)에 샘플링 파이프(551) 또는 샘플링 입구(510)에 의한 흐름 결함이 없다는 것을 표시한다.
이해될 것과 같이 샘플링 네트워크(551)에서 임의의 파괴 또는 누설은 공기가 샘플링 파이프(551) 속에 불어 넣어질 때 샘플링 입구의 행동을 변화시킬 것이며, 따라서 흐름/압력 센서에 의해 탐지된 흐름/압력을 예상된 것으로부터 벗어나게 한다. 예를 들어, 파이프(551)가 파괴된 경우 셔틀은 전혀 움직이지 않을 수 있는데 이는 압력이 셔틀을 이동시키는 대신에 파괴된 곳으로부터 빠져나갈 것이다. 더 약한 누설은 예상된 것보다 유속에 더 느린 감소 또는 압력에 증가를 일으킬 수 있고, 이는 또한 탐지가능할 수 있다.
일부 실시태양에서, 샘플링 입구는 기류 및/또는 압력이 흐름 센서 또는 압력 센서에 의해 탐지가능한 특정 주파수에서 조절되게 할 수 있다. 이것은 샘플링 입구의 작동을 유발하도록 흡입기의 작동을 조절하는 것을 필요로 할 수 있다. 이것은 샘플링 입구 자체에 의한 결함을 탐지할 수 있는 장점을 제공한다 - 예를 들어 샘플링 입구가 부분적으로 봉쇄되는 경우 셔틀은 점착될 수 있고 예상된 것보다 더 긴 기간의 진동을 가진다.
일부 시스템에서 샘플 입구(510)는 기술자에게 결함을 표시하는 표시기를 포함할 수 있다. 예를 들어 샘플 입구(510)는, 예를 들어, 결함을 표시하는 시각적 및/또는 청각적 신호표시 장치를 포함하는 회로판(52) 형태의 전기 회로를 포함할 수 있다. 추가로 또는 선택적으로 표시기는 경고 또는 연기 및/또는 기체 탐지 시스템의 임의의 다른 상태를 표시할 수 있다.
회로는 임의의 방식, 예를 들어, 배터리, 원격 전원, 신호표시 시스템 또는 환경, 예를 들어, 태양력 또는 공기 이동을 통해 전력을 얻는 에너지 채취 수단에 의해 동력을 공급받을 수 있다.
이해될 것과 같이 샘플링 파이프 네트워크의 정확한 성능을 측정하는 본 방법의 실시태양은 본 발명에 기술된 입자 탐지 시스템의 임의의 것에서 실행될 수 있다.
본 명세서에 개시되고 정의된 발명은 언급된 또는 문헌 또는 도면으로부터 명백한 개별 특징의 둘 이상의 모든 선택적 조합으로 연장된다는 것이 이해될 것이다. 이런 조합의 전부는 본 발명의 여러 선택적 양태를 구성한다.
Claims (57)
- 흡입된 입자 탐지 시스템에서 입자 탐지의 방법으로서, 시스템은 샘플링 파이프 네트워크 및 입자 탐지기를 가지며, 샘플링 파이프 네트워크는
입자 탐지기와 유체를 전달하는 적어도 하나의 샘플링 파이프,
샘플 공기가 적어도 하나의 샘플링 파이프를 통해 들어가는 복수의 샘플링 입구, 및
복수의 샘플링 입구의 적어도 하나의 샘플링 파이프 상류에 있는 개구부를 포함하며, 개구부는 샘플링 입구 중 임의의 하나보다 더 낮은 흐름 임피던스를 가지며;
상기 방법은 공기 샘플링 네트워크를 통해 샘플 공기를 입자 탐지기로 끌어당기는 단계;
입자 탐지기로 샘플 공기를 분석하는 단계;
소정의 임계값보다 큰 공기 샘플에서 입자의 농도가 탐지되는 경우에, 샘플링 파이프에 복수의 샘플 공기 패킷을 형성하기 위해, 확대 국면에 들어가는 단계, 각 샘플 공기 패킷은 샘플링 입구에 상응하며 상응하는 샘플링 입구로부터 끌어 당겨진 확대된 농도의 공기를 포함한다;
복수의 샘플 공기 패킷을 포함하는 샘플 공기를 샘플링 파이프를 통해 입자 탐지기로 수송하는 단계;
어느 샘플링 입구를 통해 임의의 입자가 입자 탐지 시스템에 들어갔는지를 측정하는 단계를 포함하는 방법. - 제 1 항에 있어서,
확대 단계는 적어도 하나의 샘플링 파이프에서 샘플 공기의 흐름 방향을 반복적으로 변화시키는 것을 포함하는 방법. - 제 1 항 또는 제 2 항에 있어서,
확대 단계는 간섭 단계 없이, 소정의 임계값보다 큰 입자의 농도가 탐지된 직후 발생하는 방법. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
임계값보다 큰 입자 농도가 탐지된 후 샘플 공기의 수송을 정지하는 단계를 더 포함하는 방법. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
확대 단계는 확대 장치를 작동하는 단계를 포함하며 확대 장치는 가역적 팬, 벨로우, 왕복 피스톤 및 진동막의 적어도 하나를 포함하는 방법. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
개구부는 부분적으로 밀폐된 말단 캡인 방법. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
개구부의 임피던스는 복수의 샘플링 입구의 전체 임피던스보다 낮은 방법. - 제 7 항에 있어서,
개구부는 최종 상류 샘플링 입구로부터 5 내지 10미터 떨어져 있는 방법. - 제 7 항에 있어서,
개구부는 최종 상류 샘플링 입구로부터 약 10미터 떨어져 있는 방법. - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
샘플링 파이프 네트워크는 개구부를 통해 끌어당겨진 샘플 공기를 세정하기 위한 복수의 샘플 입구의 필터 상류를 포함하는 방법. - 제 2 항에 있어서,
흐름 방향을 반복적으로 변화시키는 단계는 2 내지 10Hz 사이의 주파수에서 흐름 방향을 진동시키는 단계를 포함하는 방법. - 적어도 하나의 샘플링 파이프,
샘플 공기가 통과하여 적어도 하나의 샘플링 파이프에 들어가는 복수의 샘플링 입구, 및
복수의 샘플링 입구의 적어도 하나의 샘플링 파이프 상류에 있으며, 샘플링 입구 중 임의의 하나보다 더 낮은 흐름 임피던스를 가진 개구부를 포함하는 샘플링 파이프 네트워크;
샘플링 파이프와 유체를 전달하고 공기 샘플링 네트워크를 통해 끌어 당겨진 샘플 공기에서 입자를 분석하도록 만들어진 입자 탐지기; 및
입자 탐지기가 소정의 임계값보다 큰 입자 농도를 탐지하는 경우에, 샘플 파이프에서 복수의 샘플 공기 패킷을 생성하도록 구성된 확대 장치를 포함하는 입자 탐지 시스템으로서, 각 샘플 공기 패킷은 샘플링 입구에 상응하며 상응하는 샘플링 입구로부터 끌어 당겨진 확대된 농도의 공기를 포함하며,
상기 시스템은 어느 샘플링 입구를 통해 임의의 입자가 입자 탐지 시스템에 들어갔는지를 측정하도록 구성되는 입자 탐지 시스템. - 제 12 항에 있어서,
확대 장치는 가역적 팬, 벨로우, 왕복 피스톤 및 진동막 중 적어도 하나를 포함하는 입자 탐지 시스템. - 제 12 항 또는 제 13 항에 있어서,
개구부는 부분적으로 밀폐된 말단 캡인 입자 탐지 시스템. - 제 12 항 내지 제 14 항 중 어느 한 항에 있어서,
개구부의 임피던스는 복수의 샘플링 입구의 총 임피던스보다 낮은 입자 탐지 시스템. - 제 15 항에 있어서,
개구부는 최종 상류 샘플링 입구로부터 5 내지 10미터 떨어져 있는 입자 탐지 시스템. - 제 15 항에 있어서,
개구부는 최종 상류 샘플링 입구로부터 약 10미터 초과하여 떨어져 있는 입자 탐지 시스템. - 제 12 항 내지 17 항 중 어느 한 항에 있어서,
샘플링 파이프 네트워크는 개구부를 통해 끌어당겨진 샘플 공기를 세정하기 위한 복수의 샘플 입구의 필터 상류를 포함하는 입자 탐지 시스템. - 제 13 항에 있어서,
흐름 방향을 반복적으로 변화시키는 단계는 2 내지 10Hz 사이의 주파수에서 흐름 방향을 진동시키는 단계를 포함하는 입자 탐지 시스템. - 제 12 항 내지 제 19 항 중 어느 한 항에 있어서,
제 1 항 내지 제 11 항 중 어느 한 항에 따른 방법을 실행하게 하도록 구성된 입자 탐지 시스템. - 공기 샘플링 네트워크를 테스트하는 방법으로서, 네트워크는 적어도 하나의 공기 샘플링 파이프 및 하나 이상의 샘플링 입구를 포함하며, 상기 방법은
공기를 공기 샘플링 시스템 속으로 불어넣는 단계;
불어넣은 공기가 하나 이상의 샘플링 입구를 통해 빠져나감에 따라 공기 샘플링 네트워크의 적어도 하나의 단편을 통과하는 공기의 흐름 특성을 측정하는 단계;
측정된 흐름 특성의 측정된 값을 소정의 값과 비교하는 단계; 및
측정된 값이 소정의 값과 설정량 만큼 차이가 나는 경우 결함을 표시하는 단계를 포함하는 방법. - 제 21 항에 있어서,
흐름 특성은 유속 또는 압력인 방법. - 제 21 항 또는 제 22 항에 있어서,
공기 샘플링 파이프에서 이웃하는 구성요소로부터 적어도 하나의 단편을 분리하는 단계를 더 포함하는 방법. - 제 21 항 내지 제 23 항 중 어느 한 항에 있어서,
공기 샘플링 네트워크는 적어도 하나의 공기 샘플링 파이프와 유체를 전달하는 한 말단에 입자 탐지기를 포함하는 방법. - 제 24 항에 있어서,
탐지기는 하나 이상의 샘플링 입구의 밖으로의 흐름을 측정하는 흐름 센서를 포함하는 방법. - 제 24 항 또는 제 25 항에 있어서,
공기는 입자 탐지기가 위치되는 말단으로부터 공기 샘플링 네트워크 속으로 불어넣어지는 방법. - 제 23 항에 있어서,
적어도 하나의 단편은 적어도 하나의 샘플링 입구를 포함하며 분리하는 단계는 기류를 봉쇄하는 단계를 포함하여 공기만이 적어도 하나의 샘플링 입구를 통해 적어도 하나의 단편을 빠져나가는 방법. - 제 27 항에 있어서,
분리하는 단계는 입자 탐지기로부터 떨어진 단편의 말단에 있는 구멍 또는 밸브를 밀폐하는 단계를 더 포함하는 방법. - 제 28 항에 있어서,
구멍 또는 밸브는 흐름 특성의 측정 이전에 밀폐되는 방법. - 제 21 항 내지 제 29 항 중 어느 한 항에 있어서,
팬은 공기를 공기 샘플링 시스템 속으로 불어넣는데 사용되는 방법. - 제 21 항 내지 제 30 항 중 어느 한 항에 있어서,
결함을 표시하는 단계는 신호를 발생시키는 단계를 포함하는 방법. - 샘플링 파이프 내의 적어도 하나의 기류 특성에 변화를 유도하는 샘플링 파이프에 기류에 변화를 일으키는 단계, 및
상기 기류 특성에 변화의 효과를 탐지하는 단계를 포함하여 흡입된 입자 및/또는 기체 샘플링 시스템에서 샘플링 파이프의 정확한 성능을 측정하는 방법. - 제 32 항에 있어서,
샘플링 파이프에 흐름 방향을 변화시켜 상기 기류 특성에 변화를 유도하는 방법. - 제 32 항 또는 제 33 항에 있어서,
샘플링 파이프에 흐름 또는 압력에 변화의 패턴을 일으켜서 기류 특성에 변화를 일으키는 단계를 더 포함하는 방법. - 관찰된 지역으로부터 흡입된 샘플링 시스템의 샘플링 파이프로 기류를 향하게 하도록 구성되며, 샘플링 파이프에 흐름 특성에 변화를 일으키도록 작동될 수 있는, 흡입된 입자 및/또는 기체 샘플링 시스템을 위한 샘플링 입구.
- 제 35 항에 있어서,
공기가 샘플링 파이프 쪽으로 샘플링 입구 속으로 끌어당겨질 때 효과적인 개방 위치 및 샘플링 입구를 통과하는 기류가 변화된 특성을 가지는 적어도 하나의 작동된 위치 사이에서 작동가능한 흐름 변형 장치를 포함하는 샘플링 입구. - 제 36 항에 있어서,
기류 변형 장치는 공기압으로 작동되는 샘플링 입구. - 공기를 샘플링 파이프 네트워크 속에 불어넣는 단계; 및
파이프 네트워크에서 공기의 유속 및/또는 압력을 측정하는 단계를 포함하여 샘플링 파이프 네트워크의 적어도 일부의 정확한 성능을 측정하는 방법. - 제 38 항에 있어서,
상기 방법은 공기의 일부가 샘플링 파이프 네트워크에 있는 적어도 하나의 샘플링 입구를 통해 배출되도록 샘플링 파이프 네트워크 속에 공기를 불어넣는 단계를 포함하는 방법. - 제 38 항 또는 제 39 항에 있어서,
샘플링 파이프 네트워크 속에 공기를 불어넣는 단계는 샘플링 파이프 네트워크에서 흐름을 변형시키는 샘플링 파이프 네트워크에서 적어도 하나의 흐름 변형 장치의 작동을 일으키는 방법. - 공기 부피의 비정상적 상태를 탐지하기 위한 탐지기 및 보조장치를 포함하는 공기 부피에 비정상적인 상태를 탐지하기 위한 입자 탐지 시스템으로서, 탐지기 및 보조장치는 기류 통로에 의해 서로 및 공기 부피와 유체를 전달하며,
탐지기는 기류 통로를 통해 보조장치와 적어도 한 방향으로 통신하도록 작동되는 입자 탐지 시스템. - 제 41 항에 있어서,
탐지기는 작동 정보를 보조장치에 전달하는 입자 탐지 시스템. - 제 41 항 또는 제 42 항에 있어서,
탐지기는 기류 통로에서 기류 특성을 변화시킴으로써 기류 통로를 통해 보조장치에 신호를 전달할 수 있는 입자 탐지 시스템. - 제 43 항에 있어서,
기류 특성을 변화시키는 단계는 기류 통로에서 유속 및/또는 방향 또는 압력 파동 또는 파도를 변화시키는 단계를 포함하는 입자 탐지 시스템. - 제 43 항 또는 제 44 항에 있어서,
기류 특성의 변화는 탐지기 내의 흡입기 팬과 같은 탐지기의 내의 또는 탐지기의 제어장치 내의 기류 장치에 의해 생성되는 입자 탐지 시스템. - 제 43 항 내지 제 45 항 중 어느 한 항에 있어서,
기류 특성에 변화는 탐지된 변화에 대해 반응하는 보조장치에 의해 탐지되는 입자 탐지 시스템. - 제 43 항 내지 제 46 항 중 어느 한 항에 있어서,
기류 특성에 변화는 변하여 다른 신호가 보조장치에 대해 다른 상황을 의미하는 입자 탐지 시스템. - 제 43 항 내지 제 47 항 중 어느 한 항에 있어서,
보조장치는 기류 특징에 변화를 탐지하는 하나 이상의 센서를 포함하는 센싱 시스템을 가지는 입자 탐지 시스템. - 제 41 항 내지 제 48 항 중 어느 한 항에 있어서,
보조장치는 공기 부피의 비정상 상태를 탐지하기 위한 탐지기인 입자 탐지 시스템. - 제 49 항에 있어서,
보조 탐지기는 다음 형태: 입자 탐지기, 기체 탐지기, 온도/열 탐지기, 습도 탐지기 중 하나인 입자 탐지 시스템. - 제 41 항 내지 제 48 항 중 어느 한 항에 있어서,
보조장치는 밸브, 팬, 흐름 제어 장치, 탐지기, 필터, 샘플링 입구 중 임의의 하나 이상인 입자 탐지 시스템. - 제 41 항 내지 제 48 항 중 어느 한 항에 있어서,
보조장치는 샘플링 파이프에 있는 샘플링 입구이며, 샘플링 입구는 탐지기와 통신하는 기류 통로에 장치를 포함하는 입자 탐지 시스템. - 제 52 항에 있어서,
샘플링 입구는 결함, 경고 또는 연기 및/또는 기체 탐지 시스템의 임의의 다른 상태를 표시하는 시각적 및/또는 청각적 신호표시 장치를 포함하는 전기 회로를 포함하는 입자 탐지 시스템. - 제 53 항 또는 제 54 항에 있어서,
탐지기는 시각적 및/또는 청각적 신호표시 장치를 활성화하기 위해 샘플링 입구와 통신하는 입자 탐지 시스템. - 제 52 항 내지 제 54 항 중 어느 한 항에 있어서,
각 샘플링 입구는 자신의 신호표시 주소를 가져서 탐지기는 공통 샘플링 파이프에 여러 샘플링 입구가 존재하는 경우에도 특정 샘플링 입구와 통신하는 입자 탐지 시스템. - 제 41 항 내지 제 55 항 중 어느 한 항에 있어서,
탐지기는 기류 통로를 통해 보조장치와 양방향으로 통신하도록 작동가능한 입자 탐지 시스템. - 제 56 항에 있어서,
보조장치로부터 탐지기로의 통신은 보조장치에 밸브 또는 다른 흐름 변형 장치의 존재에 의해 일어나며 기류 특성에 대한 효과는 탐지기에서 흐름 센서에 의해 탐지되는 입자 탐지 시스템.
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/AU2013/001201 WO2014059479A1 (en) | 2012-10-16 | 2013-10-16 | Addressability in particle detection |
| AUPCT/AU2013/001201 | 2013-10-16 | ||
| AU2013904414 | 2013-11-14 | ||
| AU2013904414A AU2013904414A0 (en) | 2013-11-14 | Addressability in particle detection | |
| US201461949191P | 2014-03-06 | 2014-03-06 | |
| US61/949,191 | 2014-03-06 | ||
| AU2014901211 | 2014-04-03 | ||
| AU2014901211A AU2014901211A0 (en) | 2014-04-03 | Improvements to aspirated sampling systems | |
| PCT/AU2014/050290 WO2015054749A1 (en) | 2013-10-16 | 2014-10-16 | Aspirated particle detection with various flow modifications |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160097188A true KR20160097188A (ko) | 2016-08-17 |
Family
ID=52827470
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167010728A KR20160097188A (ko) | 2013-10-16 | 2014-10-16 | 다양한 흐름 변형에 의한 흡입된 입자 탐지 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US10161837B2 (ko) |
| EP (1) | EP3058335A4 (ko) |
| JP (1) | JP6574762B2 (ko) |
| KR (1) | KR20160097188A (ko) |
| CN (1) | CN105917208A (ko) |
| AU (1) | AU2014336978B2 (ko) |
| CA (1) | CA2926732A1 (ko) |
| TW (1) | TWI681179B (ko) |
| WO (1) | WO2015054749A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210054233A (ko) * | 2019-11-05 | 2021-05-13 | 올라이트라이프주식회사 | 압력변화 모니터링을 통한 화재위치파악이 가능한 공기흡입형 화재감지시스템 및 화재감지방법 |
| KR20210054232A (ko) * | 2019-11-05 | 2021-05-13 | 올라이트라이프주식회사 | 연기농도 모니터링을 통한 화재위치파악이 가능한 공기흡입형 화재감지시스템 및 화재감지방법 |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2014350164B2 (en) * | 2013-11-14 | 2019-05-02 | Xtralis Global | Improvements to multi-point sampling valves |
| JP2017512309A (ja) | 2014-03-06 | 2017-05-18 | エクストラリス・グローバルXtralis Global | 吸引サンプリングシステムの改良 |
| US9791354B2 (en) * | 2015-01-26 | 2017-10-17 | Honeywell International Inc. | Inline pre-filter for aspirated detectors |
| US10979334B1 (en) | 2015-10-02 | 2021-04-13 | MyDigitalShield, Inc. | Systems and methods for monitoring network traffic |
| FR3042597B1 (fr) * | 2015-10-16 | 2021-03-19 | Planetwatch24 | Dispositif et procede de capture et d'enregistrement des particules fines et/ou densite des gaz nox dans l'air |
| US10304320B2 (en) * | 2015-12-16 | 2019-05-28 | Honeywell International Inc. | Systems, methods, and devices for calibrating particulate matter sensors |
| CN108474727B (zh) * | 2015-12-23 | 2021-10-01 | 西门子保健有限责任公司 | 用于分析在待检测液体中的颗粒的流动室 |
| KR102614489B1 (ko) * | 2016-12-01 | 2023-12-15 | 엘지전자 주식회사 | 먼지 측정 장치 |
| CN108692761B (zh) * | 2017-04-12 | 2024-02-06 | 北京万生人和科技有限公司 | 一种空气质量采样检测仪 |
| WO2019116725A1 (ja) * | 2017-12-12 | 2019-06-20 | 日本電気株式会社 | トンネル内火災時制御システム |
| US10504236B2 (en) * | 2018-01-08 | 2019-12-10 | The Boeing Company | Testing a battery |
| JP7056178B2 (ja) * | 2018-01-30 | 2022-04-19 | 富士通株式会社 | 測定装置及び測定方法 |
| TWI657236B (zh) | 2018-01-31 | 2019-04-21 | 研能科技股份有限公司 | 氣體檢測裝置 |
| TWI670480B (zh) | 2018-01-31 | 2019-09-01 | 研能科技股份有限公司 | 氣體檢測裝置 |
| CN110095565B (zh) * | 2018-01-31 | 2022-05-24 | 研能科技股份有限公司 | 气体检测装置 |
| TWI696813B (zh) * | 2018-01-31 | 2020-06-21 | 研能科技股份有限公司 | 氣體檢測裝置 |
| CN108318299A (zh) * | 2018-02-06 | 2018-07-24 | 刘砚涛 | 一种职业卫生用智能空气自动采样器 |
| US11946837B2 (en) * | 2018-05-15 | 2024-04-02 | Carrier Corporation | Electroactive actuators as sampling port valves for aspirating contaminant detection |
| US10380862B1 (en) * | 2018-09-17 | 2019-08-13 | Massoud M Heidary | Fire protection system with fan shut off, including a camera and a display unit |
| CA3075327A1 (en) | 2019-03-12 | 2020-09-12 | Mlh Fire Protection Ltd. | Air sampling smoke detector and method of ingesting air therein |
| CN109932490B (zh) * | 2019-03-20 | 2024-02-13 | 西安航空学院 | 一种带有反抽功能的气体预处理装置及气体检测装置 |
| CN110033588B (zh) * | 2019-04-30 | 2023-12-12 | 国网安徽省电力有限公司淮北供电公司 | 一种采样管、火灾探测设备及预警系统、预警方法及装置 |
| EP3843057B1 (en) * | 2019-12-23 | 2022-11-16 | Carrier Corporation | Point detector for fire alarm system |
| RU2726142C1 (ru) * | 2020-01-31 | 2020-07-09 | Общество с ограниченной ответственностью "Пожтехника" | Аспирационный пожарный извещатель (варианты) |
| EP3889931A1 (en) * | 2020-03-30 | 2021-10-06 | Carrier Corporation | Self-cleaning aspirating smoke detector |
| EP3907484B1 (en) * | 2020-05-08 | 2023-08-30 | Carrier Corporation | Detection of leakage in an aspirating fire detection system |
| TWI769514B (zh) * | 2020-09-01 | 2022-07-01 | 家登精密工業股份有限公司 | 光罩盒潔淨設備 |
| US11385212B2 (en) * | 2020-09-25 | 2022-07-12 | Honeywell International Inc. | Smoke detection sample point |
| EP4016490A1 (de) * | 2020-12-18 | 2022-06-22 | Wagner Group GmbH | Verfahren und testvorrichtung zur überprüfung der funktionsfähigkeit eines ansaugpartikelerkennungssystems |
| CN112504775B (zh) * | 2021-01-04 | 2023-09-26 | 中交国通公路工程技术有限公司 | 一种co气体含量检测设备 |
| CN113008223B (zh) * | 2021-03-03 | 2022-10-28 | 哈尔滨工程大学 | 基于粒子滤波与图优化的海底地形同步定位与建图方法 |
| US11761875B2 (en) * | 2021-06-01 | 2023-09-19 | Honeywell International Inc. | Adjusting for air flow temperature changes in an aspirating smoke detector |
| CN113362561B (zh) * | 2021-06-03 | 2022-10-18 | 武汉云侦科技有限公司 | 一种环境安全隐患综合预警系统及方法 |
| CN113884623B (zh) * | 2021-09-24 | 2023-11-21 | 华北科技学院(中国煤矿安全技术培训中心) | 一种危化品仓储区易燃气体检测方法及检测警报装置 |
| EP4216187A1 (en) * | 2022-01-24 | 2023-07-26 | Carrier Corporation | Monitoring of the integrity of an aspirating detection system |
| US11804118B2 (en) * | 2022-03-01 | 2023-10-31 | Honeywell International Inc. | Aspirating smoke detector discreet sample point |
| CN114923736B (zh) * | 2022-06-01 | 2023-05-16 | 连云港市质量技术综合检验检测中心 | 一种应用于净水器检测的水质易挥发性物质加标取样装置 |
| CN114858224B (zh) * | 2022-07-08 | 2022-10-14 | 山西中能华信矿业技术有限公司 | 一种矿井作业瓦斯检测用抽采装置及方法 |
| CN116106525B (zh) * | 2023-04-13 | 2023-09-15 | 深圳市帝迈生物技术有限公司 | 血液分析仪 |
| CN116678691B (zh) * | 2023-07-28 | 2024-01-09 | 江苏富泰净化科技股份有限公司 | 一种大气污染监控用的空气颗粒含量采样检测装置 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2266262B1 (ko) | 1974-03-28 | 1976-12-17 | Commissariat Energie Atomique | |
| GB1454602A (en) * | 1974-05-02 | 1976-11-03 | Jenkins A | Apparatus for checking the contents of closed containers |
| CH583415A5 (ko) * | 1974-06-28 | 1976-12-31 | Cerberus Ag | |
| GB1489928A (en) * | 1974-08-29 | 1977-10-26 | Pye Electronic Prod Ltd | Method and apparatus for sampling the atmosphere in non-hermetically-sealed containers |
| JPS539670B2 (ko) | 1975-02-14 | 1978-04-07 | ||
| JPS53146687A (en) | 1977-05-26 | 1978-12-20 | Aloka Co Ltd | Collector for environmental measurement |
| US4253508A (en) | 1979-01-19 | 1981-03-03 | Bodai Industries, Inc. | Selective filtering of tobacco smoke by enhanced filtration efficiency |
| JPS59192940A (ja) * | 1983-04-16 | 1984-11-01 | Toyota Motor Corp | パ−ジ装置付スモ−クメ−タ |
| US4608556A (en) | 1983-07-04 | 1986-08-26 | Cole Martin T | Smoke detection apparatus |
| EP0132969B1 (en) * | 1983-07-04 | 1988-11-02 | Martin Terence Cole | Improvements relating to smoke detection apparatus |
| US5103212A (en) | 1989-07-03 | 1992-04-07 | Worcester Polytechnic Institute | Balanced fluid flow delivery system |
| US5272646A (en) | 1991-04-11 | 1993-12-21 | Farmer Edward J | Method for locating leaks in a fluid pipeline and apparatus therefore |
| DE4424909A1 (de) | 1994-07-14 | 1996-01-18 | Siemens Ag | Verfahren und Vorrichtung zur Ortung von Schadstoffansammlungen |
| DE4432599C2 (de) * | 1994-09-13 | 1996-10-31 | Thomae Gmbh Dr K | Probenahmeverfahren für die Bioprozeßanalytik |
| JPH08184536A (ja) | 1994-12-27 | 1996-07-16 | Hochiki Corp | サンプリング方式による空気汚染検出装置及び空気汚染検出方法 |
| US6125710A (en) * | 1997-04-15 | 2000-10-03 | Phoenix Controls Corporation | Networked air measurement system |
| AU2003902318A0 (en) | 2003-05-14 | 2003-05-29 | Vision Fire And Security Pty Ltd | Improved Sensing Apparatus And Method |
| JP2004353559A (ja) * | 2003-05-29 | 2004-12-16 | Hitachi Unisia Automotive Ltd | 蒸発燃料処理装置のリーク診断装置 |
| DE10348565B4 (de) * | 2003-10-20 | 2007-01-04 | Wagner Alarm- Und Sicherungssysteme Gmbh | Verfahren und Vorrichtung zum Erkennen und Lokalisieren eines Brandes |
| US7375642B2 (en) * | 2004-08-24 | 2008-05-20 | Wagner Alarm- Und Sicherungssysteme Gmbh | Method and device for identifying and localizing a fire |
| US7216556B2 (en) * | 2004-09-23 | 2007-05-15 | Aircuity, Inc. | Tubing for transporting air samples in an air monitoring system |
| AU2011202538B2 (en) * | 2004-11-12 | 2012-06-07 | Garrett Thermal Systems Limited | Method and apparatus for determining flow |
| US7784358B2 (en) * | 2004-11-12 | 2010-08-31 | Vfs Technologies Limited | Flow metering device for a plurality of fluid carriers |
| GB2430027A (en) | 2005-09-09 | 2007-03-14 | Kidde Ip Holdings Ltd | Fibre bragg temperature sensors |
| DE502006000573D1 (de) * | 2006-01-07 | 2008-05-15 | Hekatron Vertriebs Gmbh | Verfahren und Vorrichtung zur Erkennung eines Brandes |
| ATE517407T1 (de) | 2007-05-16 | 2011-08-15 | Siemens Ag | Detektion und ortsbestimmung eines brandes |
| US8188874B2 (en) | 2008-02-07 | 2012-05-29 | Veltek Associates, Inc. | Air sampling system having inline flow control switch |
| JP5009208B2 (ja) * | 2008-03-21 | 2012-08-22 | 能美防災株式会社 | 煙感知器 |
| KR101529735B1 (ko) * | 2008-03-21 | 2015-06-17 | 노미 보사이 가부시키가이샤 | 연기 감지기 |
| US20100194575A1 (en) * | 2009-01-30 | 2010-08-05 | Carlos Pedrejon Rodriguez | Dual channel aspirated detector |
| EP2542326A4 (en) * | 2010-03-05 | 2016-09-07 | Xtralis Technologies Ltd | FILTER REDIRECTION |
| US8850871B2 (en) | 2010-09-30 | 2014-10-07 | Siemens Aktiengesellschaft | Pipeline leak location using ultrasonic flowmeters |
| US8701980B2 (en) * | 2011-10-27 | 2014-04-22 | Veltek Associates, Inc. | Air sample tracking system and method |
| AU2013332261A1 (en) * | 2012-10-16 | 2015-04-16 | Garrett Thermal Systems Limited | Addressability in particle detection |
| WO2014082122A2 (en) * | 2012-11-27 | 2014-06-05 | Xtralis Technologies Ltd | Fire detection |
| EP3005330B1 (en) * | 2013-06-03 | 2024-04-10 | Garrett Thermal Systems Ltd | Particle detection system and related methods |
-
2014
- 2014-10-16 AU AU2014336978A patent/AU2014336978B2/en not_active Ceased
- 2014-10-16 EP EP14853996.8A patent/EP3058335A4/en not_active Withdrawn
- 2014-10-16 WO PCT/AU2014/050290 patent/WO2015054749A1/en active Application Filing
- 2014-10-16 CA CA2926732A patent/CA2926732A1/en not_active Abandoned
- 2014-10-16 KR KR1020167010728A patent/KR20160097188A/ko not_active Application Discontinuation
- 2014-10-16 TW TW103135827A patent/TWI681179B/zh not_active IP Right Cessation
- 2014-10-16 US US15/029,304 patent/US10161837B2/en not_active Expired - Fee Related
- 2014-10-16 CN CN201480067968.4A patent/CN105917208A/zh active Pending
- 2014-10-16 JP JP2016522727A patent/JP6574762B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210054233A (ko) * | 2019-11-05 | 2021-05-13 | 올라이트라이프주식회사 | 압력변화 모니터링을 통한 화재위치파악이 가능한 공기흡입형 화재감지시스템 및 화재감지방법 |
| KR20210054232A (ko) * | 2019-11-05 | 2021-05-13 | 올라이트라이프주식회사 | 연기농도 모니터링을 통한 화재위치파악이 가능한 공기흡입형 화재감지시스템 및 화재감지방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI681179B (zh) | 2020-01-01 |
| AU2014336978B2 (en) | 2019-07-11 |
| CA2926732A1 (en) | 2015-04-23 |
| JP6574762B2 (ja) | 2019-09-11 |
| WO2015054749A1 (en) | 2015-04-23 |
| JP2017502254A (ja) | 2017-01-19 |
| CN105917208A (zh) | 2016-08-31 |
| EP3058335A4 (en) | 2017-06-28 |
| US10161837B2 (en) | 2018-12-25 |
| AU2014336978A1 (en) | 2016-04-28 |
| EP3058335A1 (en) | 2016-08-24 |
| TW201530112A (zh) | 2015-08-01 |
| US20160223437A1 (en) | 2016-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20160097188A (ko) | 다양한 흐름 변형에 의한 흡입된 입자 탐지 | |
| US11002579B2 (en) | Addressability in particle detection | |
| US11808674B2 (en) | System and method for air sampling in controlled environments | |
| KR100906206B1 (ko) | 화재 탐지와 국소화 방법 및 장치 | |
| KR102077519B1 (ko) | 공기흡입식 연기감지 시스템 | |
| JP2015520380A (ja) | マルチモード検出 | |
| JP2017512309A (ja) | 吸引サンプリングシステムの改良 | |
| JP2015518135A (ja) | エンクロージャの動的封止を制御するための方法及びデバイス | |
| CN206684891U (zh) | 一种空气采样烟雾探测器 | |
| AU2013200353B2 (en) | Addressability in particle detection | |
| CN208902574U (zh) | 一种吸气式光电烟雾检测室 | |
| JPH0620169A (ja) | 吸引式煙検知システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| WITB | Written withdrawal of application |