KR101595772B1 - 자기장 집속 장치 및 방법 - Google Patents
자기장 집속 장치 및 방법 Download PDFInfo
- Publication number
- KR101595772B1 KR101595772B1 KR1020140112594A KR20140112594A KR101595772B1 KR 101595772 B1 KR101595772 B1 KR 101595772B1 KR 1020140112594 A KR1020140112594 A KR 1020140112594A KR 20140112594 A KR20140112594 A KR 20140112594A KR 101595772 B1 KR101595772 B1 KR 101595772B1
- Authority
- KR
- South Korea
- Prior art keywords
- magnetic field
- transmission coil
- voltage
- winding
- focusing
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F5/00—Coils
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Abstract
자기장 집속 장치 및 방법을 개시한다.
본 실시예의 일 측면에 의하면, 복수의 송신 코일을 포함하는 자기장 집속 장치에 있어서, 상기 자기장 집속 장치는 특정 집속점에 자기장을 집속시키는 자기장 발생부; 및 상기 자기장 발생부에 전압을 공급하는 전압공급부를 포함하되, 상기 자기장 발생부는 복수의 송신 코일 모듈을 포함하고, 상기 전압공급부는 상기 복수의 송신 코일 모듈 각각에 독립적으로 전압을 공급하는 것을 특징으로 하는 자기장 집속 장치를 제공한다.
본 실시예의 일 측면에 의하면, 복수의 송신 코일을 포함하는 자기장 집속 장치에 있어서, 상기 자기장 집속 장치는 특정 집속점에 자기장을 집속시키는 자기장 발생부; 및 상기 자기장 발생부에 전압을 공급하는 전압공급부를 포함하되, 상기 자기장 발생부는 복수의 송신 코일 모듈을 포함하고, 상기 전압공급부는 상기 복수의 송신 코일 모듈 각각에 독립적으로 전압을 공급하는 것을 특징으로 하는 자기장 집속 장치를 제공한다.
Description
본 실시예는 자기장 집속 장치 및 방법에 관한 것이다.
이 부분에 기술된 내용은 단순히 본 실시예에 대한 배경정보를 제공할 뿐 종래기술을 구성하는 것은 아니다.
자기장 영상 기술(MIT: Magnetic Induction Tomography)은 수 cm 크기의 송신 코일을 복수개 사용하여 3차원의 임의의 위치에 고주파 자기장을 인가함으로써, 관찰하고자 하는 물체 내부에서 자기유도(Magnetic Induction)에 의한 와전류(Eddy Current)에 의해 발생하는 미세한 자기장을 수신 코일에서 감지하는 기술이다.
기존의 자기장 영상 기술은 송수신 코일간 상호 간섭과 고주파 자기장 사용으로 인한 신호 감쇄 등으로 인해 해상도 및 SNR(Signal to Noise Ratio, 신호 대 잡음비)이 낮아 의료기기 등 고해상도 및 고정밀도를 요하는 기기에 사용하기 어려웠다.
본 실시예는 고집적 송신 코일 어레이(Array)를 이용함으로써, 3차원의 임의의 위치에 높은 정밀도로 자기장을 집속할 수 있는 자기장 집속 장치 및 방법을 제공하는 것에 그 목적이 있다.
또한 본 실시예는 송수신 코일간 신호를 시간적으로 분리함으로써, 높은 SNR을 갖는 자기장 집속 장치 및 방법을 제공하는 것에 그 목적이 있다.
본 실시예의 일 측면에 의하면, 복수의 송신 코일을 포함하는 자기장 집속 장치에 있어서, 상기 자기장 집속 장치는 특정 집속점에 자기장을 집속시키는 자기장 발생부; 및 상기 자기장 발생부에 전압을 공급하는 전압공급부를 포함하되, 상기 자기장 발생부는 복수의 송신 코일 모듈을 포함하고, 상기 전압공급부는 상기 복수의 송신 코일 모듈 각각에 독립적으로 전압을 공급하는 것을 특징으로 하는 자기장 집속 장치를 제공한다.
본 실시예의 다른 측면에 의하면, 자기장 집속 장치에 있어서, 상기 자기장 집속 장치는 특정 집속점에 자기장을 집속시키는 자기장 발생부; 상기 자기장 발생부에 전압을 공급하는 전압공급부; 집속된 자기장에 의해 유도 전압이 발생하는 수신센서부; 및 상기 수신센서부에 발생한 유도 전압을 측정하는 측정부를 포함하되, 상기 자기장 발생부는 복수의 송신 코일 모듈을 포함하고, 상기 수신센서부는 복수의 수신 코일 모듈을 포함하며, 상기 전압공급부는 상기 복수의 송신 코일 모듈 각각에 독립적으로 전압을 공급하는 것을 특징으로 하는 자기장 집속 장치를 제공한다.
본 실시예의 또 다른 측면에 의하면, 복수의 송신 코일을 포함하는 자기장 집속 장치의 제어방법에 있어서, 상기 복수의 송신 코일 각각에 독립적으로 전압을 인가하되, 상기 전압의 인가가 동시에 이루어지게 함으로써, 상기 자기장 집속 장치로부터 이격된 특정 위치에 특정 방향 및 세기를 가지는 자기장을 생성하도록 하는 것을 특징으로 하는 자기장 집속 장치의 제어방법을 제공한다.
본 실시예의 또 다른 측면에 의하면, 복수의 송신 코일 및 복수의 수신 코일을 포함하는 자기장 집속 장치의 제어방법에 있어서, 상기 복수의 송신 코일 각각에 독립적으로 전압을 인가함으로써 상기 자기장 집속 장치로부터 이격된 특정 위치에 특정 방향 및 세기를 가지는 자기장을 생성하는 집속 과정; 및 상기 복수의 수신 코일에 발생하는 유도 전압의 세기를 측정함으로써 상기 특정 위치에 있는 측정 대상물의 형태 또는 구조를 측정하는 측정 과정을 포함하는 것을 특징으로 하는 자기장 집속 장치의 제어방법을 제공한다.
본 실시예에 의하면, 고집적 코일 어레이를 이용하여 3차원의 임의의 위치에 높은 정밀도로 자기장을 집속시킬 수 있다.
또한 본 실시예에 의하면, 송수신 코일간 신호를 시간적으로 분리시킴으로써 높은 SNR을 가지는 자기장 영상을 얻을 수 있다.
본 실시예를 적용할 수 있는 분야는 매우 다양하며, 그 중 몇 가지만 예시하면 다음과 같다.
본 실시예를 의료 영상 분야에 적용하면, 인체 내부를 1mm급의 고해상도 3차원 영상으로 관찰할 수 있다. 본 실시예를 이용한 의료 영상 기술은 X-ray에 비해 인체에 무해하고, MRI에 비해 가격이 저렴하다는 장점이 있다.
본 실시예를 암 치료 분야에 적용하면, 암세포가 존재하는 국소부위에 수 Tesla급의 자기장을 집속시킴으로써 암세포를 파괴할 수 있다.
본 실시예를 국방, 대테러 분야에 적용하면, 콘크리트 벽, 위장 막, 덤불 숲을 투시하여 건물이나 방해물 내부를 관찰할 수 있다.
본 실시예를 금속탐지 분야에 적용하면, 지하의 광물자원을 빠르고 정확하게 탐색할 수 있다.
본 실시예를 공항이나 항만 분야에 적용하면, X-ray나 라디오파 등을 이용한 기존의 보안검색장치를 대신하여 수하물 내부를 검색할 수 있다.
본 실시예를 유통이나 물류 분야에 적용하면, 현재 사용되고 있는 바 코드나 RFID를 대체할 수 있는 새로운 형태의 식별 코드를 개발할 수 있다.
본 실시예를 무선 전력 전송 분야에 적용하면, 기존의 무선 전력 전송 기술에 비해 낮은 EMF와 높은 효율을 가진 무선 전력 전송을 할 수 있다.
본 실시예를 통신 분야에 적용하면, 자기장 집속을 이용한 무선 전력 전송과 무선통신 기술을 결합한 새로운 형태의 근거리 자기장 통신 기술을 개발할 수 있다.
본 실시예를 핵 융합 분야에 적용하면, 핵융합로 내에 있는 플라즈마 상태의 이온을 집속된 자기장을 이용하여 안정적으로 제어할 수 있다. 핵융합로 내에 있는 플라즈마 상태의 이온을 제어하는 것은 핵융합의 난제 중 하나였으나, 본 실시예에 의해 극복 가능하다.
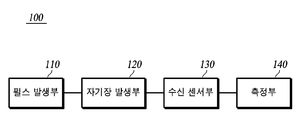
도 1a는 본 발명의 일 실시예에 따른 자기장 집속 장치를 예시한 블록도이다.
도 1b는 본 발명의 일 실시예에 따른 전압공급부를 예시한 블록도이다.
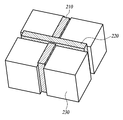
도 2는 본 발명의 일 실시예에 따른 송신 코일 모듈을 예시한 도면이다.
도 3은 본 발명의 일 실시예에 따른 회로구동부 및 송신 코일 모듈에 대한 등가 회로를 예시한 도면이다.
도 4는 본 발명의 일 실시예에 따른 송신 코일 어레이를 예시한 도면이다.
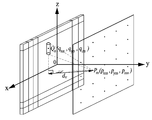
도 5a는 본 발명의 일 실시예에 따른 송신 코일 어레이에서 특정 송신 코일 모듈의 수직 방향의 권선에 전류가 흐를 때, 송신 코일 어레이와 평행한 평면 위에 있는 임의의 한 점에서 형성되는 자기장의 방향 및 세기를 설명하기 위한 도면이다.
도 5b는 도 5a를 간략하게 표현한 도면이다.
도 5c는 유한도선에 흐르는 전류에 의해 유도되는 자기장을 설명하기 위한 도면이다.
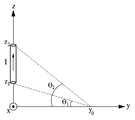
도 5d는 도 5b를 yz평면 방향으로 바라본 것이다.
도 5e는 도 5b를 xy평면 방향으로 바라본 것이다.
도 6a는 본 발명의 일 실시예에 따른 송신 코일 어레이에서 특정 송신 코일 모듈의 수평 방향의 권선에 전류가 흐를 때, 송신 코일 어레이와 평행한 평면 위에 있는 임의의 한 점에서 형성되는 자기장의 방향 및 세기를 설명하기 위한 도면이다.
도 6b는 도 6a를 xy평면 방향으로 바라본 것이다.
도 6c는 도 6a를 yz평면 방향으로 바라본 것이다.
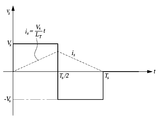
도 7a는 본 발명의 일 실시예에 따른 자기장 집속 장치에서, 0TS에서 0.5TS까지는 송신 코일에 양전압 펄스 +VS가 인가되고, 0.5TS에서 1TS까지는 송신 코일에 음전압 펄스 -VS가 인가될 때, 인가된 전압에 의해 송신 코일에 흐르는 전류의 파형을 예시한 도면이다.
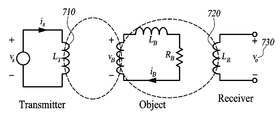
도 7b는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 송신 코일 모듈, 측정 대상물 및 수신 코일 모듈에 대한 등가 회로를 예시한 도면이다.
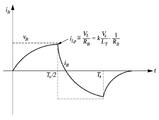
도 7c는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 송신 코일에 도 7a와 같은 전압이 인가되는 경우, 송신 코일에서 발생한 자기장이 측정 대상에 집속될 때 측정 대상에서 유도되는 전류의 파형을 예시한 도면이다.
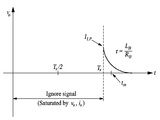
도 7d는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 측정 대상에 도 7c와 같은 전류가 유도되는 경우, 수신 코일에서 검출되는 전압의 파형을 예시한 도면이다.
도 7e는 본 발명의 일 실시예에 따른 자기장 집속 장치에서, 0TS에서 0.25TS까지는 송신 코일에 양전압 펄스 +VS가 인가되고, 0.25TS에서 0.75TS까지는 송신 코일에 음전압 펄스 -VS가 인가되며, 0.75TS에서 1TS까지는 송신 코일에 양전압 펄스 +VS가 인가될 때, 인가된 전압에 의해 송신 코일에 흐르는 전류의 파형을 예시한 도면이다.
도 1b는 본 발명의 일 실시예에 따른 전압공급부를 예시한 블록도이다.
도 2는 본 발명의 일 실시예에 따른 송신 코일 모듈을 예시한 도면이다.
도 3은 본 발명의 일 실시예에 따른 회로구동부 및 송신 코일 모듈에 대한 등가 회로를 예시한 도면이다.
도 4는 본 발명의 일 실시예에 따른 송신 코일 어레이를 예시한 도면이다.
도 5a는 본 발명의 일 실시예에 따른 송신 코일 어레이에서 특정 송신 코일 모듈의 수직 방향의 권선에 전류가 흐를 때, 송신 코일 어레이와 평행한 평면 위에 있는 임의의 한 점에서 형성되는 자기장의 방향 및 세기를 설명하기 위한 도면이다.
도 5b는 도 5a를 간략하게 표현한 도면이다.
도 5c는 유한도선에 흐르는 전류에 의해 유도되는 자기장을 설명하기 위한 도면이다.
도 5d는 도 5b를 yz평면 방향으로 바라본 것이다.
도 5e는 도 5b를 xy평면 방향으로 바라본 것이다.
도 6a는 본 발명의 일 실시예에 따른 송신 코일 어레이에서 특정 송신 코일 모듈의 수평 방향의 권선에 전류가 흐를 때, 송신 코일 어레이와 평행한 평면 위에 있는 임의의 한 점에서 형성되는 자기장의 방향 및 세기를 설명하기 위한 도면이다.
도 6b는 도 6a를 xy평면 방향으로 바라본 것이다.
도 6c는 도 6a를 yz평면 방향으로 바라본 것이다.
도 7a는 본 발명의 일 실시예에 따른 자기장 집속 장치에서, 0TS에서 0.5TS까지는 송신 코일에 양전압 펄스 +VS가 인가되고, 0.5TS에서 1TS까지는 송신 코일에 음전압 펄스 -VS가 인가될 때, 인가된 전압에 의해 송신 코일에 흐르는 전류의 파형을 예시한 도면이다.
도 7b는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 송신 코일 모듈, 측정 대상물 및 수신 코일 모듈에 대한 등가 회로를 예시한 도면이다.
도 7c는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 송신 코일에 도 7a와 같은 전압이 인가되는 경우, 송신 코일에서 발생한 자기장이 측정 대상에 집속될 때 측정 대상에서 유도되는 전류의 파형을 예시한 도면이다.
도 7d는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 측정 대상에 도 7c와 같은 전류가 유도되는 경우, 수신 코일에서 검출되는 전압의 파형을 예시한 도면이다.
도 7e는 본 발명의 일 실시예에 따른 자기장 집속 장치에서, 0TS에서 0.25TS까지는 송신 코일에 양전압 펄스 +VS가 인가되고, 0.25TS에서 0.75TS까지는 송신 코일에 음전압 펄스 -VS가 인가되며, 0.75TS에서 1TS까지는 송신 코일에 양전압 펄스 +VS가 인가될 때, 인가된 전압에 의해 송신 코일에 흐르는 전류의 파형을 예시한 도면이다.
이하 본 발명의 일부 실시예를 예시적인 도면을 통해 상세하게 설명한다. 각 도면의 구성요소들에 참조부호를 부가함에 있어서 동일한 구성요소들에 대해서는 비록 다른 도면상에 표시되더라도 가능한 한 동일한 부호를 가지도록 하고 있음에 유의해야 한다. 또한 본 실시예를 설명함에 있어서 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 실시예의 요지를 흐릴 수 있다고 판단되는 경우에는 그 상세한 설명을 생략한다.
본 실시예의 구성요소를 설명하는 데 있어서 제1, 제2, ⅰ), ⅱ), a), b) 등의 부호를 사용할 수 있다. 이러한 부호는 그 구성요소를 다른 구성요소와 구별하기 위한 것일 뿐, 그 부호에 의해 해당 구성요소의 본질 또는 차례 또는 순서 등이 한정되지 않는다. 또한 명세서에서 어떤 부분이 어떤 구성요소를 '포함' 또는 '구비'한다고 할 때, 이는 명시적으로 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있는 것을 의미한다. 또한 명세서에 기재된 '~부', '모듈' 등의 용어는 적어도 하나의 기능이나 동작을 처리하는 단위를 의미하며, 이는 '하드웨어' 또는 '소프트웨어' 또는 '하드웨어 및 소프트웨어의 결합'으로 구현될 수 있다.
본 실시예에서 제안하는 기술은 고해상도 SMF(High-Resolution Synthesized Magnetic Field Focusing) 기술으로서, 정확히 제어된 전압에 의해 복수(예컨대 수천 개)의 송신 코일에 제어된 전류를 흘려줌으로써, 특정 위치에 자기장을 집속시키는 기술이다.
본 실시예에 따르면 자기장 집속 장치가 자기장을 집속시키고자 하는 위치에 근접하지 않고 일정 거리 이격되어 있어도, 사용자가 원하는 특정 위치에 사용자가 원하는 방향과 세기를 가진 자기장을 집속시킬 수 있다.
도 1a는 본 발명의 일 실시예에 따른 자기장 집속 장치를 예시한 블록도이다.
본 실시예에 따른 자기장 집속 장치(100)는 전압공급부(110), 자기장 발생부(120), 수신센서부(130) 및 측정부(140)를 포함한다. 다만 실시예에 따라 상술한 자기장 집속 장치(100)의 일부 구성요소를 생략하거나 다른 구성요소를 추가하여 구현할 수 있다.
일례로 암 치료 분야에서 암세포가 존재하는 국소부위에 수 Tesla급의 자기장을 집속시키기 위한 자기장 집속 장치에서는, 전압공급부(110) 및 자기장 발생부(120)만 있으면 소기의 목적을 달성할 수 있다.
다른 예로 무선 전력 전송 분야에서 단말기가 위치한 특정 지점에 자기장을 집속시켜 고효율의 무선 충전을 가능하게 하기 위한 자기장 집속 장치에서는, 전압공급부(110) 및 자기장 발생부(120)만 있으면 소기의 목적을 달성할 수 있다.
이와 같이 필요에 따라 전압공급부(110) 및 자기장 발생부(120)를 포함하되 수신센서부(130) 및 측정부(140)는 포함하지 않는 형태의 자기장 집속 장치를 구현할 수 있다.
이하, 자기장 집속 장치(100)의 각 구성요소에 대하여 상세히 설명한다.
자기장 발생부(120)는 복수의 송신 코일 모듈을 포함한다. 자기장 발생부(120)를 구성하는 송신 코일 모듈의 형상, 기능 및 배치에 대해서는 추후 자세히 설명한다.
전압공급부(110)는 자기장 발생부(120)에 전압을 공급한다. 자기장 발생부(120)는 송신 코일 어레이를 포함하고, 송신 코일 어레이는 복수의 송신 코일 모듈을 포함하는데, 전압공급부(110)는 자기장 발생부(120)의 송신 코일 어레이에 있는 각각의 송신 코일 모듈에 독립적으로 전압을 인가한다. 또한 전압공급부(110)가 각각의 송신 코일 모듈의 수직 방향의 권선과 수평 방향의 권선에 인가하는 전압도 각각 독립적이다.
수신센서부(130)는 복수의 수신 코일 모듈을 포함한다. 수신 코일 모듈은 집속지점에 집속된 자기장에 의해 집속지점에 생성되는 유도 전류에 따라서 유도 전압을 발생시킨다. 수신 코일 모듈은 송신 코일 모듈에 인접하게 배치될 수도 있으나, 여기에 한정되지 않고 응용 목적에 따라서 다양한 위치에 배치될 수 있다.
측정부(140)는 복수의 수신 코일 모듈에서 발생하는 유도 전압 혹은 유도 전류의 세기를 측정한다.
이하, 전압공급부(110)의 각 구성요소에 대하여 상세히 설명한다.
도 1b는 본 발명의 일 실시예에 따른 전압공급부를 예시한 블록도이다.
본 실시예에 따른 전압공급부(110)는 집속정보 입력부(111), 구조정보 산출부(113) 및 회로구동부(115)를 포함한다.
집속정보 입력부(111)는 자기장을 집속하고자 하는 지점(이하, 집속점이라고 한다)에 대한 정보를 입력받는다. 집속점에 대한 정보는 집속점으로 설정가능한 복수의 집속점 후보 중에서 사용자가 선택할 수 있다. 또한 집속정보 입력부(111)는 집속점에 집속시키고자 하는 자기장의 방향 및 세기에 대한 정보를 사용자로부터 입력받는다.
구조정보 산출부(113)는 복수의 집속점 후보와 복수의 송신 코일 모듈 사이의 위치관계 및 자기장 전달 매질의 특성에 따른 구조정보를 이용하여, 집속정보 입력부(111)에서 입력받은 자기장을 집속시키기 위해 각 송신 코일 모듈에 인가되어야 하는 전압을 계산한다. 이 때, 복수의 집속점 후보와 복수의 송신 코일 모듈 사이의 위치관계 및 자기장 전달 매질의 특성에 따른 구조정보는 각 집속점 후보에 대응하여 계산된 상태로 메모리 등의 저장매체에 저장되어 있을 수 있다.
각 송신 코일 모듈에 인가되어야 하는 전압의 구체적인 계산 방법은 송신 코일 어레이의 형태에 따라 다르다. 본 실시예에는 그 중 하나의 예로서, 송신 코일 어레이가 평면 형태로 구성된 경우에 있어서, 각 송신 코일 모듈에 인가되어야 하는 전압의 세기에 대하여 수학식을 이용하여 추후 설명한다.
회로구동부(115)는 구조정보 산출부(113)에서 계산된 전압값에 따라 각 송신 코일 모듈에 전압을 인가한다. 이 때 회로구동부(115)에서 인가하는 전압은 펄스 형태(Pulse Wave)인 것이 바람직하다.
본 실시예는 2013년 10월 24일에 동 발명자 및 동 출원인이 출원한 "고해상도 자기장 집속 장치, 방법 및 그를 위한 자기장 수신 장치(출원번호: 10-2013-0127402)"의 실제 구현에 대한 내용을 담고 있다.
상기 출원(출원번호: 10-2013-0127402)에서는 자기장 발생부(120)에 대하여 추상적으로 설명하고 있으나, 본 실시예는 자기장 발생부(120)의 구체적인 형상 및 기능에 대하여 개시한다.
도 2는 본 발명의 일 실시예에 따른 송신 코일 모듈을 예시한 도면이다.
송신 코일 모듈은 코어(230)에 수직 방향의 권선(210)과 수평 방향의 권선(220)이 감겨진 형태로 구성된다.
코어(230)의 형태는 사각 기둥 형태인 것이 바람직하고, 코어(230)의 일 단면은 정사각형 형태인 것이 바람직하다. 코어(230)의 형태가 사각 기둥 형태이고 코어(230)의 일 단면이 정사각형 형태이면, 코어(230)에 감기는 수직 방향의 권선(210)의 전면부의 길이와 코어(230)에 감기는 수평 방향의 권선(220)의 전면부의 길이가 동일해진다.
본 명세서는 코어(230)의 형태가 사각 기둥 형태이고 코어(230)의 일 단면이 정사각형 형태인 것을 전제로 코어(230)에 감기는 수직 방향의 권선(210) 및 수평 방향의 권선(220) 각각에 흘러야 하는 전류의 세기를 계산한다.
다만 코어(230)의 일 단면이 정사각형 형태가 아니라 직사각형 형태라고 하더라도, 이하의 수학식에서 ℓ의 값을 수정함으로써 특정 위치에 집적되는 자기장의 방향 및 세기를 계산할 수 있을 것이다. 예컨대 코어(230)의 일 단면이 정사각형 형태가 아니라 직사각형 형태라면 이하의 수학식에서 n번째 송신 코일 모듈의 수직 방향의 권선의 길이를 ℓ1이라고 하고, n번째 송신 코일 모듈의 수평 방향의 권선의 길이를 ℓ2라고 함으로써, 특정 위치에 집적되는 자기장의 방향 및 세기를 용이하게 계산할 수 있을 것이다.
전압공급부(110)는 송신 코일 모듈의 수직 방향의 권선(210)과 수평 방향의 권선(220)에 각기 독립적으로 전압을 인가한다. 그로 인해 수직 방향의 권선(210)과 수평 방향의 권선(220)에 흐르는 전류는 각기 독립적이다.
도 3은 본 발명의 일 실시예에 따른 회로구동부 및 송신 코일 모듈에 대한 등가 회로를 예시한 도면이다.
도 3에서 도시한 바와 같이, 회로구동부(115)는 마이크로 프로세서(240), DC전원(250), 컨버터(260), 게이트 드라이버(270), 커패시터(C), 제1스위치(Q1), 제2스위치(Q2), 제3스위치(Q3), 제4스위치(Q4) 및 송신 코일(280)을 포함한다.
도 3에서 송신 코일(280)은 코일(Lc)과 저항(Rc)을 포함한다. 송신 코일(280)은 회로구동부(115)에 연결되어 있다.
도 3에서 송신 코일의 양 끝단을 각각 노드 X, Y라고 할 때, VX, VY는 각각 노드 X, Y의 전압을 의미하고, CX, CY는 각각 노드 X, Y에서 소자들로 인해 기생적으로 나타나는 커패시턴스 값을 의미한다. 게이트 드라이버(270)에서 VX, VY의 전압값을 이용하여 영전압 스위칭(Zero-Voltage Switching, ZVS)을 하면 회로구동부(115)의 동작 효율을 증가시킬 수 있다.
도 4는 본 발명의 일 실시예에 따른 송신 코일 어레이를 예시한 도면이다.
자기장 발생부(120)는 송신 코일 어레이를 포함한다. 송신 코일 어레이는 복수의 송신 코일 모듈이 결합되어 있는 모듈이다.
송신 코일 어레이는 복수의 송신 코일 모듈을 평면 위에 가로 및 세로로 배열한 형태로 구성된다.
다만 본 실시예에서는 복수의 송신 코일 모듈이 평면 위에 배열된 것으로 설명하고 있으나, 실시예에 따라서는 복수의 송신 코일 모듈을 곡면, 구면, 타원면, 원통면 등 다양한 입체 형상 위에 배열할 수 있을 것이다. 예컨대 의료 영상을 촬영하기 위해 사용하는 자기장 집속 장치는 복수의 송신 코일 모듈이 원통면 위에 배열된 형태인 것이 바람직하다.
복수의 송신 코일 모듈을 평면 위에 가로 및 세로로 배열하여 송신 코일 어레이를 구성하였다고 할 때, 각 송신 코일 모듈에 흐르는 전류에 의해 발생하는 자기장의 방향 및 세기를 수학식을 이용하여 설명한다.
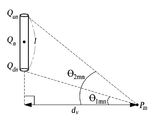
도 5a는 본 발명의 일 실시예에 따른 송신 코일 어레이에서 특정 송신 코일 모듈의 수직 방향의 권선에 전류가 흐를 때, 송신 코일 어레이와 평행한 평면 위에 있는 임의의 한 점에서 형성되는 자기장의 방향 및 세기를 설명하기 위한 도면이다.
도 5b는 도 5a를 간략하게 표현한 도면이다.
도 5b에서, Qn은 n번째 송신 코일 모듈의 중심점으로서, Qn의 3차원 좌표는 (qxn, qyn, qzn)으로 표현된다.
Pm은 m번째 집속점으로서, Pm의 3차원 좌표는 (pxm, pym, pzm)으로 표현된다.
송신 코일 모듈의 수직 방향의 권선 또는 수평 방향의 권선에 전류가 흐르면 자기장이 유도된다. 송신 코일 모듈의 수직 방향의 권선 또는 수평 방향의 권선은 유한한 길이를 가지므로, 수직 방향의 권선 또는 수평 방향의 권선에 흐르는 전류에 의해 유도되는 자기장은, 유한도선에 흐르는 전류에 의해 유도되는 자기장을 분석함으로써 구할 수 있다.
도 5c는 유한도선에 흐르는 전류에 의해 유도되는 자기장을 설명하기 위한 도면이다.
비오사바르의 법칙(Biot-Savart's Law)에 의할 때, 미소길이의 유한도선에 흐르는 전류에 의해 유도되는 자기장의 세기는 수학식 1과 같다.

수학식 1에서, dB는 미소길이의 유한도선에 흐르는 전류에 의해 유도되는 자기장의 자속밀도, μ0은 자유공간에서의 투자율, I는 도선을 흐르는 전류의 세기, ℓ은 도선의 길이,  은 유한도선과 수직인 단위벡터, r은 유한도선의 연장선에서 집속점까지의 수직거리, y0은 집속점의 y좌표의 값,
은 유한도선과 수직인 단위벡터, r은 유한도선의 연장선에서 집속점까지의 수직거리, y0은 집속점의 y좌표의 값,  는 자속의 방향을 나타내는 단위벡터이다.
는 자속의 방향을 나타내는 단위벡터이다.
유한도선이 z축 위에서 z1에서 z2까지 위치한다고 할 때, 유한도선에 흐르는 전류에 의해 유도되는 자기장의 자속밀도는 수학식 1을 z에 대하여 z1에서 z2까지 적분함으로써 구할 수 있다. 적분 결과는 수학식 2와 같다.

수학식 2에서, B는 길이가 z2 - z1인 유한도선에 흐르는 전류에 의해 유도되는 자기장의 자속밀도, θ1은 y축에 대하여 y0과 z1을 연결한 선분이 이루는 각도이고, θ2는 y축에 대하여 y0과 z2를 연결한 선분이 이루는 각도이다.
수학식 2에서 나타난 바와 같이, 유한도선에 전류가 흐르면 주위에 자기장이 형성되며, 비오사바르의 법칙에 의하면 유한도선에 흐르는 전류에 의해 특정 지점에서 형성된 자기장의 방향 및 세기를 알 수 있게 된다.
도 5d는 도 5b를 yz평면 방향으로 바라본 것이다.
도 5d에서, Qun은 n번째 송신 코일 모듈의 수직 방향의 권선의 윗쪽 끝(up)의 좌표를 나타낸다.
Qdn은 n번째 송신 코일 모듈의 수직 방향의 권선의 아랫쪽 끝(down)의 좌표를 나타낸다.
θ1mn은 dv에 대하여, n번째 송신 코일 모듈의 수직 방향의 권선의 아랫쪽 끝과 m번째 집속점을 연결한 선분이 이루는 각도이다.
θ2mn은 dv에 대하여, n번째 송신 코일 모듈의 수직 방향의 권선의 윗쪽 끝과 m번째 집속점을 연결한 선분이 이루는 각도이다.
ℓ은 n번째 송신 코일 모듈의 수직 방향의 권선의 길이이다.
dv는 수학식 3과 같이 계산할 수 있다.

Qdn에서 Pm까지의 길이는 수학식 4와 같다.

Qun에서 Pm까지의 길이는 수학식 5와 같다.

sinθ1mn의 값은 수학식 6과 같다.

sinθ2mn의 값은 수학식 7과 같다.

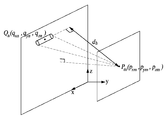
도 5e는 도 5b를 xy평면 방향으로 바라본 것이다.
도 5e에서, θvmn은 y축에 대하여, dv가 이루는 각도이다.
Bvmn은 n번째 송신 코일 모듈의 수직 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장이다. Bvmn의 방향벡터는 xy평면 상에 존재한다.
Bvmn는 유한도선에 흐르는 전류에 의해 유도되는 자기장이므로, 수학식 2를 적용했을 때 Bvmn의 세기는 수학식 8과 같다.

그러나 실제로는 자기 거울 효과를 고려하여야 한다. 2013년에 발행된 논문 "Finite-Width Magnetic Mirror Models of Mono and Dual Coils for Wireless Electric Vehicles(발행: IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 28, NO. 3, MARCH 2013)"에 따르면, 자기 거울 효과(Magnetic Mirror Effect)가 발생하면 자기장의 세기가 2배가 되는 것이 알려져 있다.
자기 거울 효과를 고려한 Bvmn의 세기는 수학식 9와 같다.

삼각함수를 이용하여 θvmn을 구하면 수학식 10과 같다.

결과적으로 n번째 송신 코일 모듈의 수직 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장 Bvmn은 수학식 11과 같다.

송신 코일 모듈의 개수가 N개라고 할 때, N개의 송신 코일 모듈의 수직 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장 Bv은 수학식 12와 같다.
Bvmn의 방향벡터는 xy평면 상에 존재하므로, Bvmn을 구할 때는 x방향과 y방향의 성분만 고려해주면 된다.

수학식 12에서 Bvmn, x는 n번째 송신 코일 모듈의 수직 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장의 x방향의 성분을 나타낸다. Bvmn, y는 n번째 송신 코일 모듈의 수직 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장의 y방향의 성분을 나타낸다.
Bvmn, x는 수학식 13과 같다.

Bvmn, y는 수학식 14와 같다.

N개의 송신 코일 모듈의 수직 방향의 권선에 의해 M개의 집속점의 위치에 유도되어 합성되는 자기장의 x방향의 성분을 행렬을 이용하여 하나의 식으로 나타내면 수학식 15와 같다.

수학식 15에서, Bvx는 M×1 행렬이고, Avx는 M×N 행렬이며, Iv는 N×1 행렬이다.
avmn, x는 n번째 송신 코일 모듈의 수직 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장의 x방향의 성분을 n번째 송신 코일 모듈의 수직 방향의 권선에 흐르는 전류값 Ivn으로 나눈 값을 의미한다. 수학식 13을 Ivn으로 나누면 avmn, x를 구할 수 있다.
avmn, x는 수학식 16과 같다.

N개의 송신 코일 모듈의 수직 방향의 권선에 의해 M개의 집속점의 위치에 유도되어 합성되는 자기장의 y방향의 성분을 행렬을 이용하여 하나의 식으로 나타내면 수학식 17과 같다.

수학식 17에서, Bvy는 M×1 행렬이고, Avy는 M×N 행렬이며, Iv는 N×1 행렬이다.
avmn, y는 n번째 송신 코일 모듈의 수직 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장의 y방향의 성분을 n번째 송신 코일 모듈의 수직 방향의 권선에 흐르는 전류값 Ivn으로 나눈 값을 의미한다. 수학식 14를 Ivn으로 나누면 avmn, y를 구할 수 있다.
avmn, y는 수학식 18과 같다.

행렬을 합성하면 N개의 송신 코일 모듈의 수직 방향의 권선에 의해 M개의 집속점의 위치에 유도되어 합성되는 자기장의 x방향의 성분 및 y방향의 성분을 하나의 행렬로 나타낼 수 있다.
수학식 15의 행렬 Bvx와 수학식 17의 행렬 Bvy를 합성하면 수학식 19와 같다.

수학식 19에서, 합성된 행렬 Bv는 2M×1 행렬이다.
수학식 15의 행렬 Avx와 수학식 17의 행렬 Avy를 합성하면 수학식 20과 같다.

수학식 20에서, 합성된 행렬 Av는 2M×N 행렬이다.
결과적으로 N개의 송신 코일 모듈의 수직 방향의 권선에 의해 M개의 집속점의 위치에 유도되어 합성되는 자기장의 x방향의 성분 및 y방향의 성분을 행렬로 나타내면 수학식 21과 같다.
수학식 21은 다음과 같은 과정을 거쳐 유도된다.
Av +를 Av의 right inverse(우역원)라고 할 때, Bv=Av(Av +)Bv가 성립한다.
Bv=AvIv에 Bv=Av(Av +)Bv를 대입하면 Av(Av +)Bv = AvIv가 도출된다.
Av(Av +)Bv = AvIv이므로, Iv = (Av +)Bv로 설정할 수 있다. 선형대수에서 Av의 right inverse는 Av T(AvAv T)-1이므로, Iv = Av T(AvAv T)-1Bv가 성립한다.
선형대수에서 Av의 right inverse는 'Av의 행≤Av의 열'인 경우에만 존재한다. Av의 행은 2M개, 열은 N개이므로, 수학식 21이 성립하기 위해서는 N≥2M이어야 한다.
예컨대 m번째 집속점의 위치에, xy평면 상의 방향을 지닌, 특정 세기의 자기장을 합성하려 한다고 하자. 이 경우 합성하고자 하는 자기장의 위치, 방향 및 세기에 따라 Bv 행렬을 수정한 후 수학식 21에 대입하면 행렬 Iv가 도출된다. 도출된 행렬 Iv를 분석하면 각각의 송신 코일 모듈의 수직 방향의 권선에 흘러야 하는 전류를 계산할 수 있다.
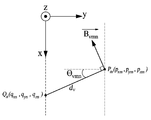
도 6a는 본 발명의 일 실시예에 따른 송신 코일 어레이에서 특정 송신 코일 모듈의 수평 방향의 권선에 전류가 흐를 때, 송신 코일 어레이와 평행한 평면 위에 있는 임의의 한 점에서 형성되는 자기장의 방향 및 세기를 설명하기 위한 도면이다.
도 6a에서, Qn은 n번째 송신 코일 모듈의 중심점으로서, Qn의 3차원 좌표는 (qxn, qyn, qzn)으로 표현된다.
Pm은 m번째 집속점으로서, Pm의 3차원 좌표는 (pxm, pym, pzm)으로 표현된다.
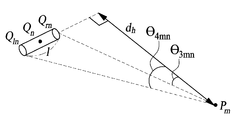
도 6b는 도 6a를 xy평면 방향으로 바라본 것이다.
도 6b에서, Qln은 n번째 송신 코일 모듈의 수평 방향의 권선의 왼쪽 끝(left)의 좌표를 나타낸다.
Qrn은 n번째 송신 코일 모듈의 수평 방향의 권선의 오른쪽 끝(right)의 좌표를 나타낸다.
θ3mn은 dh에 대하여, n번째 송신 코일 모듈의 수평 방향의 권선의 아랫쪽 끝과 m번째 집속점을 연결한 선분이 이루는 각도이다.
θ4mn은 dh에 대하여, n번째 송신 코일 모듈의 수평 방향의 권선의 윗쪽 끝과 m번째 집속점을 연결한 선분이 이루는 각도이다.
ℓ은 n번째 송신 코일 모듈의 수평 방향의 권선의 길이이다.
dh는 수학식 22와 같이 계산할 수 있다.

Qrn에서 Pm까지의 길이는 수학식 23과 같다.

Qln에서 Pm까지의 길이는 수학식 24와 같다.

sinθ3mn의 값은 수학식 25와 같다.

sinθ4mn의 값은 수학식 26과 같다.

도 6c는 도 6a를 yz평면 방향으로 바라본 것이다.
도 6c에서, θhmn은 y축에 대하여, dh가 이루는 각도이다.
Bhmn은 n번째 송신 코일 모듈의 수평 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장이다. Bhmn의 방향벡터는 yz평면 상에 존재한다.
Bhmn는 유한도선에 흐르는 전류에 의해 유도되는 자기장이므로, 수학식 2를 적용했을 때 Bhmn의 세기는 수학식 27과 같다.

그러나 실제로는 자기 거울 효과를 고려하여야 한다. 자기 거울 효과를 고려한 Bhmn의 세기는 수학식 28과 같다.

삼각함수를 이용하여 θhmn을 구하면 수학식 29와 같다.

결과적으로 n번째 송신 코일 모듈의 수평 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장 Bhmn은 수학식 30과 같다.

송신 코일 모듈의 개수가 N개라고 할 때, N개의 송신 코일 모듈의 수평 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장 Bh는 수학식 31과 같다.
Bhmn의 방향벡터는 yz평면 상에 존재하므로, Bhmn를 구할 때는 y방향과 z방향의 성분만 고려해주면 된다.

수학식 31에서 Bhmn, y는 n번째 송신 코일 모듈의 수평 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장의 y방향의 성분을 나타낸다. Bhmn, z는 n번째 송신 코일 모듈의 수평 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장의 z방향의 성분을 나타낸다.
Bhmn, y는 수학식 32와 같다.

Bhmn, z는 수학식 33과 같다.

N개의 송신 코일 모듈의 수평 방향의 권선에 의해 M개의 집속점의 위치에 유도되어 합성되는 자기장의 y방향의 성분을 행렬을 이용하여 하나의 식으로 나타내면 수학식 34와 같다.

수학식 34에서, Bhy는 M×1 행렬이고, Ahy는 M×N 행렬이며, Ih는 N×1 행렬이다.
ahmn, y는 n번째 송신 코일 모듈의 수평 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장의 y방향의 성분을 n번째 송신 코일 모듈의 수평 방향의 권선에 흐르는 전류값 Ihn으로 나눈 값을 의미한다. 수학식 32를 Ihn으로 나누면 ahmn, y를 구할 수 있다.
ahmn, y는 수학식 35와 같다.
N개의 송신 코일 모듈의 수평 방향의 권선에 의해 M개의 집속점의 위치에 유도되어 합성되는 자기장의 z방향의 성분을 행렬을 이용하여 하나의 식으로 나타내면 수학식 36과 같다.

수학식 36에서, Bhz는 M×1 행렬이고, Ahz는 M×N 행렬이며, Ih는 N×1 행렬이다.
ahmn, z는 n번째 송신 코일 모듈의 수평 방향의 권선에 의해 m번째 집속점의 위치에 유도되는 자기장의 z방향의 성분을 n번째 송신 코일 모듈의 수평 방향의 권선에 흐르는 전류값 Ihn으로 나눈 값을 의미한다. 수학식 33을 Ihn으로 나누면 ahmn, z를 구할 수 있다.
ahmn, z는 수학식 37과 같다.

행렬을 합성하면 N개의 송신 코일 모듈의 수평 방향의 권선에 의해 M개의 집속점의 위치에 유도되어 합성되는 자기장의 y방향의 성분 및 z방향의 성분을 하나의 행렬로 나타낼 수 있다.
수학식 34의 행렬 Bhy와 수학식 36의 행렬 Bhz를 합성하면 수학식 38과 같다.

수학식 38에서, 합성된 행렬 Bh는 2M×1 행렬이다.
수학식 34의 행렬 Ahy와 수학식 36의 행렬 Ahz를 합성하면 수학식 39와 같다.

수학식 39에서, 합성된 행렬 Ah는 2M×N 행렬이다.
결과적으로 N개의 송신 코일 모듈의 수평 방향의 권선에 의해 M개의 집속점의 위치에 유도되어 합성되는 자기장의 y방향의 성분 및 z방향의 성분을 행렬로 나타내면 수학식 40과 같다.
수학식 40은 수학식 21과 동일한 방법으로 유도된다.
선형대수에서 Ah의 right inverse는 'Ah의 행≤Ah의 열'인 경우에만 존재한다. Ah의 행은 2M개, 열은 N개이므로, 수학식 40이 성립하기 위해서는 N≥2M이어야 한다.
예컨대 m번째 집속점의 위치에, yz평면 상의 방향을 지닌, 특정 세기의 자기장을 합성하려 한다고 하자. 이 경우 합성하고자 하는 자기장의 위치, 방향 및 세기에 따라 Bh 행렬을 수정한 후 수학식 40에 대입하면 행렬 Ih가 도출된다. 도출된 행렬 Ih를 분석하면 각각의 송신 코일 모듈의 수평 방향의 권선에 흘러야 하는 전류를 계산할 수 있다.
본 실시예에 따른 자기장 집속장치의 송신 코일 모듈은 수직 방향의 권선과 수평 방향의 권선을 가지고 있다. 따라서 수학식 21과 수학식 40을 이용하여 특정 집속점에서 특정 방향 및 특정 세기의 자기장을 형성하기 위해 각각의 권선에 인가되어야 하는 전류의 세기를 계산할 수 있다.
수직 방향의 권선들에 의해 유도되는 자기장 Bv는 x, y 성분만 가지고, 수평 방향의 권선들에 의해 유도되는 자기장 Bh는 y, z 성분만 가진다. 따라서 수직 방향의 권선과 수평 방향의 권선에 동시에 전류를 인가하여 자기장 Bv와 자기장 Bh가 합성되도록 함으로써, 3차원 좌표 상에서 임의의 방향 및 세기를 가지는 자기장을 합성할 수 있다.
요약하면, 수직 방향의 권선은 xy평면 상의 방향을 지닌 자기장을 발생시키고, 수평 방향의 권선은 yz평면 상의 방향을 지닌 자기장을 발생시킨다. 복수의 송신 코일 모듈에 있는 수직 방향의 권선에 의해 유도된 xy평면 상의 방향을 지닌 자기장과, 복수의 송신 코일 모듈에 있는 수평 방향의 권선에 의해 유도된 yz평면 상의 방향을 지닌 자기장을 합성하면, 3차원 좌표 상에서 사용자가 원하는 방향 및 세기를 지닌 자기장을 합성할 수 있다.
본 실시예에 따른 자기장 집속 장치(100)의 전압공급부(110)는 집속정보 입력부(111), 구조정보 산출부(113) 및 회로구동부(115)를 포함한다.
각 송신 코일 모듈에 인가되어야 하는 전압은 구조정보 산출부(113)에서 계산된다. 특히 송신 코일 어레이가 평면 형태인 경우에 있어서 특정 위치에 특정 방향 및 세기를 자기장을 발생시키기 위하여 각 송신 코일 모듈의 수직 방향의 권선 및 수평 방향의 권선에 흘러야 하는 전류의 세기는, 수학식 21 및 수학식 40을 이용하여 계산할 수 있다.
회로구동부(115)는 집속정보 입력부(111)에 입력된 자기장의 위치, 방향 및 세기에 대한 정보를 이용하여 구조정보 산출부(113)에서 계산된 전압값에 따라, 각 송신 코일 모듈에 전압을 인가한다.
정확한 제어 및 잡음 방지를 위해서는 송신 코일 모듈에 인가되는 전압이 펄스 형태(Pulse Wave)인 것이 바람직하다. 도 7a, 도 7c 및 도 7d는 송신 코일 모듈에 인가되는 전압이 펄스 형태(Pulse Wave)인 것을 전제로 설명한 것이다.
도 7a는 본 발명의 일 실시예에 따른 자기장 집속 장치에서, 0TS에서 0.5TS까지는 송신 코일에 양전압 펄스 +VS가 인가되고, 0.5TS에서 1TS까지는 송신 코일에 음전압 펄스 -VS가 인가될 때, 인가된 전압에 의해 송신 코일에 흐르는 전류의 파형을 예시한 도면이다.
송신 코일에 양전압 펄스 +VS가 인가되면 전류(iS)가 증가하기 시작하고, 송신 코일에 음전압 펄스 -VS가 인가되면 전류(iS)가 감소하기 시작한다. 도 7b는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 송신 코일 모듈, 측정 대상물 및 수신 코일 모듈에 대한 등가 회로를 예시한 도면이다.
도 7b에서 측정 대상물은 인체일 수도 있고, 건물 내부의 물체일 수도 있으며, 땅 속의 물체일 수도 있고, 물 속의 물체일 수도 있다.
송신 코일(710)에 전류(iS)가 인가되면 자기장이 발생하고, 자기장이 측정 대상물에 집속되면 유도 전류(iB)가 발생한다. 측정 대상물에 발생한 유도 전류(iB)에 의하여 측정 대상물에서 자기장이 발생하고, 측정 대상물에서 발생한 자기장에 의해 수신 코일(720)의 전압(730)이 변하게 된다.
수신센서부(130)는 수신 코일(720)의 전압(730)의 변화를 감지하여 측정 대상물의 형태, 구조 등을 파악한다.
도 7c는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 송신 코일에 도 7a와 같은 전압이 인가되는 경우, 송신 코일에서 발생한 자기장이 측정 대상에 집속될 때 측정 대상에서 유도되는 전류의 파형을 예시한 도면이다.
송신 코일에 의해 발생한 자기장이 측정 대상물에 집속되면 유도 전류(iB)가 발생한다. 송신 코일에 인가된 전압이나 송신 코일에 흐르는 전류, 자기장이 집속된 부위의 형태, 구조 등에 따라 유도 전류(iB)의 파형도 달라진다.
도 7c는 자기장이 측정 대상물에 집속되었을 때 발생하는 유도 전류(iB)의 일례를 나타낸 것으로서, 측정 대상물에 따라 파형은 달라질 수 있다.
도 7d는 본 발명의 일 실시예에 따른 자기장 집속 장치를 이용한 자기장 영상 장치에서, 측정 대상에 도 7c와 같은 전류가 유도되는 경우, 수신 코일에서 검출되는 전압의 파형을 예시한 도면이다.
측정 대상물에 발생한 유도 전류(iB)에 의하여 측정 대상물에서 자기장이 발생한다. 측정 대상물에서 발생한 자기장에 의해 수신 코일의 전압이 변하며, 수신센서부(130)는 수신 코일의 전압의 변화를 감지하여 측정 대상물의 형태, 구조 등을 파악한다.
도 7d는 측정 대상물에 발생한 유도 전류(iB)에 의하여 수신 코일의 전압이 변하는 일례를 나타낸 것으로서, 측정 대상물에 따라 파형은 달라질 수 있다.
측정부(140)는 1개의 양전압 펄스 +VS와 1개의 음전압 펄스 -VS가 연이어서 발생한 후, 기설정 시간이 경과한 후에 수신 코일의 유도 전압을 측정하도록 구현될 수 있다.
송신 코일에 전압 인가가 중단된 TS 시점 이후라도 일정 시간 동안은 송신 코일에 흐르는 전류가 곧바로 0이 되지 않는다. 따라서 측정부(140)는 TS 시점에서 일정 시간이 지난 tm 시점에서 수신 코일의 유도 전압을 측정함으로써, 송신 코일에 흐르는 전류로 인한 자기장의 영향이 완전히 사라진 후의 수신 코일의 유도 전압을 측정하는 것이 바람직하다.
이처럼 수신 코일의 유도 전압을 TS 시점에서 일정 시간이 지난 tm 시점에 측정함으로써, 송신 코일에 전압이 인가되는 시점과 수신 코일의 전압을 측정하는 시점을 시간적으로 분리할 수 있다. 코일에 전압이 인가되는 시점과 수신 코일의 전압을 측정하는 시점을 시간적으로 분리함으로써 SNR을 높일 수 있을 뿐만 아니라, 송신 코일의 일부 또는 전부를 수신 코일 용도로 겸용하여 사용할 수도 있으므로 경제적인 효과도 얻을 수 있다.
도 7e는 본 발명의 일 실시예에 따른 자기장 집속 장치에서, 0에서 0.25TS까지는 송신 코일에 양전압 펄스 +VS가 인가되고, 0.25TS에서 0.75TS까지는 송신 코일에 음전압 펄스 -VS가 인가되며, 0.75TS에서 1TS까지는 송신 코일에 양전압 펄스 +VS가 인가될 때, 인가된 전압에 의해 송신 코일에 흐르는 전류의 파형을 예시한 도면이다.
송신 코일에 양전압 펄스 +VS가 인가되면 전류(iS)가 증가하기 시작하고, 송신 코일에 음전압 펄스 -VS가 인가되면 전류(iS)가 감소하기 시작한다.
송신 코일에 도 7a와 같은 전압을 인가하는 경우와 비교했을 때, 송신 코일에 도 7e와 같은 전압을 인가하면, 송신 코일의 동작 주파수는 같게 유지하면서 최대 전류 크기는 절반으로 감소시킬 수 있다. 결과적으로 송신 코일의 내구성 부담을 줄일 수 있다.
본 실시예는 본 발명의 기술 사상을 예시적으로 설명한 것에 불과하고, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 본 실시예의 다양한 수정 및 변형이 가능할 것이다.
본 실시예는 본 발명의 기술 사상을 한정하기 위한 것이 아니라 설명하기 위한 것이고, 따라서 본 실시예에 의하여 본 발명의 권리범위가 한정되는 것은 아니다. 본 발명의 보호범위는 청구범위에 의하여 해석되어야 하며, 그와 동등하거나 균등하다고 인정되는 모든 기술 사상은 본 발명의 권리범위에 포함되는 것으로 해석되어야 한다.
110: 전압공급부 111: 집속정보 입력부
113: 구조정보 산출부 115: 회로구동부
120: 자기장 발생부 130: 수신센서부
140: 측정부 210: 수직 방향의 권선
220: 수평 방향의 권선 230: 코어
240: 마이크로 프로세서 250: DC전원
260: 컨버터 270: 게이트 드라이버
280: 송신 코일 모듈을 구성하는 회로 710: 송신 코일
720: 수신 코일
113: 구조정보 산출부 115: 회로구동부
120: 자기장 발생부 130: 수신센서부
140: 측정부 210: 수직 방향의 권선
220: 수평 방향의 권선 230: 코어
240: 마이크로 프로세서 250: DC전원
260: 컨버터 270: 게이트 드라이버
280: 송신 코일 모듈을 구성하는 회로 710: 송신 코일
720: 수신 코일
Claims (17)
- 삭제
- 자기장 집속 장치에 있어서,
특정 집속점에 자기장을 집속시키는 자기장 발생부; 및
상기 자기장 발생부에 전압을 공급하는 전압공급부를 포함하되,
상기 자기장 발생부는 복수의 송신 코일 모듈을 포함하고,
상기 전압공급부는 상기 복수의 송신 코일 모듈 각각에 독립적으로 전압을 공급하며,
상기 복수의 송신 코일 모듈 각각은
코어, 제1권선 및 제2권선을 포함하되,
상기 제1권선과 상기 제2권선은 직각을 이루고 있으며,
상기 전압공급부는 상기 제1권선 및 상기 제2권선 각각에 독립적으로 전압을 공급하는 것을 특징으로 하는 자기장 집속 장치. - 제2항에 있어서,
상기 복수의 송신 코일 모듈은 2차원적으로 배열된 형태인 것을 특징으로 하는 자기장 집속 장치. - 제2항에 있어서,
상기 코어의 형태는 사각 기둥 형태이고, 상기 코어의 일 단면은 정사각형 형태인 것을 특징으로 하는 자기장 집속 장치. - 제2항에 있어서,
상기 전압공급부가 공급하는 전압은 펄스 형태의 파형을 갖는 것을 특징으로 하는 자기장 집속 장치. - 제3항에 있어서,
상기 전압공급부는 집속정보 입력부, 구조정보 산출부 및 회로구동부를 포함하되,
상기 집속정보 입력부는 사용자로부터 집속점, 집속점에 집속시키고자 하는 자기장의 방향 및 세기에 대한 정보를 입력받고,
상기 구조정보 산출부는 상기 집속정보 입력부로부터 입력받은 자기장을 집속시키기 위해 상기 복수의 송신 코일 모듈 각각에 인가되어야 하는 전압의 세기를 계산하며,
상기 회로구동부는 상기 구조정보 산출부가 계산한 전압의 세기에 따라 상기 복수의 송신 코일 모듈 각각에 전압을 인가하는 것을 특징으로 하는 자기장 집속 장치. - 제5항에 있어서,
상기 전압공급부가 기 설정된 단위 시간 TS 동안 전압을 공급함에 있어서, 0TS에서 0.5TS까지는 양전압 펄스를 공급하고, 0.5TS에서 1TS까지는 음전압 펄스를 공급하는 것을 특징으로 하는 자기장 집속 장치. - 제5항에 있어서,
상기 전압공급부가 기 설정된 단위 시간 TS 동안 전압을 공급함에 있어서, 0TS에서 0.25TS까지는 양전압 펄스를 공급하고, 0.25TS에서 0.75TS까지는 음전압 펄스를 공급하며, 0.75TS에서 1TS까지는 양전압 펄스를 공급함으로써, 상기 자기장 발생부의 내구성 부담을 줄이는 것을 특징으로 하는 자기장 집속 장치. - 제6항에 있어서,
상기 전압공급부는 상기 복수의 송신 코일 모듈 각각의 양 끝단의 전압값을 이용하여 영전압 스위칭(Zero-Voltage Switching, ZVS)을 함으로써, 회로구동부의 동작 효율을 증가시키는 것을 특징으로 하는 자기장 집속 장치. - 제2항에 있어서,
복수의 수신 코일 모듈을 포함하는 수신센서부; 및
상기 복수의 수신 코일 모듈에 발생하는 유도 전압의 크기를 측정하는 측정부를 더 포함하는 것을 특징으로 하는 자기장 집속 장치. - 삭제
- 삭제
- 복수의 송신 코일 모듈 및 복수의 수신 코일 모듈을 포함하되, 각 송신 코일 모듈은 코어, 제1권선 및 제2권선을 포함하며, 상기 제1권선과 상기 제2권선은 직각을 이루고 있는, 자기장 집속 장치의 제어방법에 있어서,
상기 복수의 송신 코일 모듈 각각에 독립적으로 전압을 인가함으로써 상기 자기장 집속 장치로부터 이격된 특정 위치에 특정 방향 및 세기를 가지는 자기장을 생성하는 집속 과정; 및
상기 복수의 수신 코일 모듈에 발생하는 유도 전압의 크기를 측정함으로써 상기 특정 위치에 있는 측정 대상물의 형태 또는 구조를 측정하는 측정 과정
을 포함하는 것을 특징으로 하는 자기장 집속 장치의 제어방법. - 제13항에 있어서,
상기 집속 과정 후 기설정 시간이 경과한 후에 상기 측정 과정을 개시하는 것을 특징으로 하는 자기장 집속 장치의 제어방법. - 삭제
- 자기장 집속 장치에 있어서,
상기 자기장 집속 장치는 복수의 송신 코일 모듈을 포함하고,
상기 복수의 송신 코일 모듈 각각은 수직 방향의 권선과 수평 방향의 권선을 포함하며,
상기 복수의 송신 코일 모듈 각각의 수직 방향의 권선 및 수평 방향의 권선에 흐르는 전류를 독립적으로 제어함으로써, 특정 집속점에서 특정 방향 및 특정 세기를 가지는 자기장을 유도하되,
상기 송신 코일 모듈의 수는 상기 집속점의 수의 2배보다 같거나 많은 것을 특징으로 하는 자기장 집속 장치. - 제16항에 있어서,
상기 복수의 송신 코일 모듈 각각의 수직 방향의 권선에 수학식

(Av는 N개의 수직 방향의 권선 및 M개의 집속점 사이의 구조정보를 나타내는 행렬, Av T는 Av의 전치행렬, Bv는 N개의 수직 방향의 권선들에 의해 M개의 집속점 각각에 유도되는 자기장의 x성분 및 y성분을 나타내는 행렬)
에 의해 계산된 전류가 흐르도록 하고,
상기 복수의 송신 코일 모듈 각각의 수평 방향의 권선에 수학식

(Ah는 N개의 수평 방향의 권선 및 M개의 집속점 사이의 구조정보를 나타내는 행렬, Ah T는 Ah의 전치행렬, Bh는 N개의 수평 방향의 권선들에 의해 M개의 집속점 각각에 유도되는 자기장의 y성분 및 z성분을 나타내는 행렬)
에 의해 계산된 전류가 흐르도록 하는 것을 특징으로 하는 자기장 집속 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140112594A KR101595772B1 (ko) | 2014-08-27 | 2014-08-27 | 자기장 집속 장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140112594A KR101595772B1 (ko) | 2014-08-27 | 2014-08-27 | 자기장 집속 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR101595772B1 true KR101595772B1 (ko) | 2016-02-22 |
Family
ID=55445549
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140112594A KR101595772B1 (ko) | 2014-08-27 | 2014-08-27 | 자기장 집속 장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101595772B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190123568A (ko) | 2018-04-24 | 2019-11-01 | 울산과학기술원 | Mit 기술 응용을 위한 위상영역 검출장치 및 방법 |
| KR102718209B1 (ko) * | 2023-07-19 | 2024-10-17 | 광주과학기술원 | 자장 집속 장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06241764A (ja) * | 1993-02-19 | 1994-09-02 | Makome Kenkyusho:Kk | 超音波磁歪遅延線を用いた測長装置 |
| WO2004060156A1 (ja) * | 2002-12-27 | 2004-07-22 | Hitachi Medical Corporation | 磁気共鳴イメージング装置 |
| JP2005081147A (ja) * | 2003-09-05 | 2005-03-31 | Siemens Ag | 磁石コイルシステムを用いた動作空間内の磁性体の非接触移動および/または固定装置 |
| JP2005121573A (ja) * | 2003-10-20 | 2005-05-12 | Japan Science & Technology Agency | ワイヤレス磁気マーカの位置および方向の検出方法およびそのシステム |
-
2014
- 2014-08-27 KR KR1020140112594A patent/KR101595772B1/ko active IP Right Grant
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06241764A (ja) * | 1993-02-19 | 1994-09-02 | Makome Kenkyusho:Kk | 超音波磁歪遅延線を用いた測長装置 |
| WO2004060156A1 (ja) * | 2002-12-27 | 2004-07-22 | Hitachi Medical Corporation | 磁気共鳴イメージング装置 |
| JP2005081147A (ja) * | 2003-09-05 | 2005-03-31 | Siemens Ag | 磁石コイルシステムを用いた動作空間内の磁性体の非接触移動および/または固定装置 |
| JP2005121573A (ja) * | 2003-10-20 | 2005-05-12 | Japan Science & Technology Agency | ワイヤレス磁気マーカの位置および方向の検出方法およびそのシステム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190123568A (ko) | 2018-04-24 | 2019-11-01 | 울산과학기술원 | Mit 기술 응용을 위한 위상영역 검출장치 및 방법 |
| KR102718209B1 (ko) * | 2023-07-19 | 2024-10-17 | 광주과학기술원 | 자장 집속 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Holmes | Modeling a ship’s ferromagnetic signatures | |
| CA2995078C (en) | Hand held devices for magnetic induction tomography | |
| CA2097962C (en) | Non-concentricity compensation in position and orientation measurement systems | |
| JP2022169728A (ja) | 片面式mriシステムにおけるボリューム取得のためのシステムおよび方法 | |
| WO2007108190A1 (ja) | 磁気共鳴撮像装置および磁気共鳴撮像装置用rfコイル | |
| US20140218031A1 (en) | Magnetic resonance imaging apparatus and control method thereof | |
| He et al. | The development of an EM-field probing system for manual near-field scanning | |
| US10228336B2 (en) | Mobile NMR sensor for analyzing subsurface samples | |
| KR101595772B1 (ko) | 자기장 집속 장치 및 방법 | |
| CN104361608A (zh) | 一种工业用柔性导管内窥镜的定位跟踪方法 | |
| Mach-Batlle et al. | Tailoring magnetic fields in inaccessible regions | |
| US8487613B2 (en) | System for blood flow velocity determination using MR imaging | |
| US10371765B2 (en) | Geolocation of magnetic sources using vector magnetometer sensors | |
| CN100516921C (zh) | 确定磁共振设备中物体的位置的方法和装置 | |
| Krasiński et al. | Exact inhomogeneous models and the drift of light rays induced by nonsymmetric flow of the cosmic medium | |
| KR101511192B1 (ko) | 고해상도 자기장 집속 장치, 방법 및 그를 위한 자기장 수신 장치 | |
| JP6917251B2 (ja) | 測定解析装置、燃料電池システム及び測定解析方法 | |
| Petrascu et al. | Automated 3D scanner for electromagnetic radiation assessment near the WPT active part | |
| Feix et al. | Is gravitational lensing by intercluster filaments always negligible? | |
| JP2016130702A (ja) | 等価電界強度推定方法および放射妨害波測定装置 | |
| Scholle et al. | Analysis of the accuracy of a magnetic field-based positioning system including the environment of a parking vehicle | |
| CN109730770B (zh) | 减小磁场接收单元体积、测量磁场变化率的方法、磁场接收单元、电磁跟踪系统及用途 | |
| US12072185B2 (en) | Magnetic tracking systems and methods of determining position and orientation | |
| Gubchenko | Kinetic description of the 3D electromagnetic structures formation in flows of expanding plasma coronas. Part 1: General | |
| Hedia et al. | Study of Electromagnetic Radiation Sources Using Time Reversal: Application to a Power Electronic Converter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20190201 Year of fee payment: 4 |