JPWO2020002964A1 - 走行支援方法および走行支援装置 - Google Patents
走行支援方法および走行支援装置 Download PDFInfo
- Publication number
- JPWO2020002964A1 JPWO2020002964A1 JP2020526707A JP2020526707A JPWO2020002964A1 JP WO2020002964 A1 JPWO2020002964 A1 JP WO2020002964A1 JP 2020526707 A JP2020526707 A JP 2020526707A JP 2020526707 A JP2020526707 A JP 2020526707A JP WO2020002964 A1 JPWO2020002964 A1 JP WO2020002964A1
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- reliability
- preceding vehicle
- calculated
- route
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 82
- 230000010354 integration Effects 0.000 claims abstract description 89
- 238000001514 detection method Methods 0.000 claims description 77
- 230000000052 comparative effect Effects 0.000 claims description 36
- 230000006870 function Effects 0.000 description 42
- 238000010586 diagram Methods 0.000 description 20
- 238000012545 processing Methods 0.000 description 18
- 238000004891 communication Methods 0.000 description 14
- 239000006185 dispersion Substances 0.000 description 8
- 238000011156 evaluation Methods 0.000 description 6
- 230000006399 behavior Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000033228 biological regulation Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
Images










Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/22—Platooning, i.e. convoy of communicating vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/165—Automatically following the path of a preceding lead vehicle, e.g. "electronic tow-bar"
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0027—Planning or execution of driving tasks using trajectory prediction for other traffic participants
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4044—Direction of movement, e.g. backwards
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/20—Data confidence level
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/40—High definition maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle for navigation systems
Abstract
Description
目標走行経路が連続的に変わるため、自車両の挙動が急変することを防止できる。
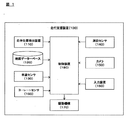
110…自車位置検出装置
120…地図データベース
130…車速センサ
140…測距センサ
150…カメラ
160…入力装置
170…駆動機構
180…制御装置
190…ヨーレートセンサ
目標走行経路が連続的に変わるため、自車両の挙動が急変することを防止できる。
110…自車位置検出装置
120…地図データベース
130…車速センサ
140…測距センサ
150…カメラ
160…入力装置
170…駆動機構
180…制御装置
190…ヨーレートセンサ
Claims (20)
- プロセッサに実行にさせる、車両の走行支援方法であって、
自車両の位置を推定し、
データベースから地図情報を取得し、
推定された前記自車両の位置及び前記地図情報に基づき、前記自車両が走行する自車走行経路を生成し、
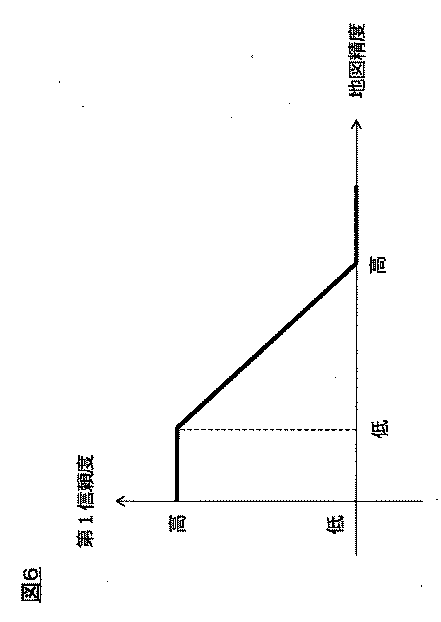
前記自車走行経路の信頼度を示す第1信頼度を演算し、
前記自車両の前方を走行する先行車を検出し、
前記先行車両が走行する先行車走行経路を生成し、
前記先行車走行経路の形状に基づき、前記先行車走行経路の信頼度を示す第2信頼度を演算し、
前記第1信頼度と前記第2信頼度に基づき、前記自車走行経路と前記先行車走行経路とを統合するための統合割合を演算し、
演算された前記統合割合で前記自車走行経路と前記先行車走行経路とを統合することで、前記自車両の目標走行経路を演算し、
前記目標走行経路に基づいて前記自車両を制御する走行支援方法。 - 前記自車両の位置の推定精度が低いほど、前記第1信頼度を低くする請求項1に記載の走行支援方法。
- 前記地図情報で表される地図の地図精度が低いほど、前記第1信頼度を低くする請求項1又は2に記載の走行支援方法。
- 前記自車両の位置の推定精度、及び、前記地図情報で表される地図の地図精度をそれぞれ演算し、
前記推定精度と前記地図精度のうち、いずれか低い方の精度に基づき前記第1信頼度を演算する請求項1記載の走行支援方法。 - センサにより検出される前記先行車の検出データを用いて、前記先行車走行経路の単体信頼度を演算し、
前記自車走行経路と前記先行車走行経路とを比較して、前記先行車走行経路の比較信頼度を演算し、
前記単体信頼度と前記比較信頼度に基づき、前記第2信頼度を演算する請求項1〜4のいずれか一項に記載の走行支援方法。 - 前記センサの検出の安定性を評価することで、前記センサの信頼度を示すセンサ信頼度を演算し、
前記センサの検出データを用いて、前記先行車走行経路に含まれる先行車走行軌跡を生成し、
前記先行車走行軌跡の長さで決まる、軌跡信頼度を演算し、
前記センサ信頼度及び前記軌跡信頼度に基づき、前記単体信頼度を演算する請求項5記載の走行支援方法。 - 前記先行車走行軌跡の長さが短いほど、前記軌跡信頼度を低くする請求項6記載の走行支援方法。
- 前記センサ信頼度と前記軌跡信頼度のうち、いずれか低い方の信頼度に基づき前記単体信頼度を演算する請求項6又は7記載の走行支援方法。
- 前記自車走行経路の曲率と前記先行車走行経路の曲率との曲率差を演算し、前記曲率差が大きいほど前記比較信頼度を低くする請求項5〜8のいずれか一項に記載の走行支援方法。
- 前記曲率差が同じ場合に、前記自車両の車速が大きいほど前記比較信頼度が低くなる相関関係を用いて、前記自車両の車速及び前記曲率差に基づき、前記比較信頼度を演算する請求項9記載の走行支援方法。
- 前記自車走行経路上における横方向の前記自車両の位置と、前記先行車走行経路上における横方向の前記先行車の位置との偏差を演算し、前記偏差が大きいほど前記比較信頼度を低くする請求項5〜10のいずれか一項に記載の走行支援方法。
- 前記自車走行経路の曲率と前記先行車走行経路の曲率との曲率差を演算し、前記曲率差と前記先行車走行経路の信頼度との相関性に基づき、前記第2信頼度を示す値を曲率信頼度として演算し、
前記自車走行経路上における横方向の前記自車両の位置と、前記先行車走行経路上における横方向の前記先行車の位置との偏差を演算し、前記偏差と前記先行車走行経路の信頼度との相関性に基づき、前記第2信頼度を示す値を横方向信頼度として演算し、
前記曲率信頼度及び前記横方向信頼度のうち、いずれか低い方の信頼度に基づき前記第2信頼度を演算する請求項5〜8のいずれか一項に記載の走行支援方法。 - 前記単体信頼度及び前記比較信頼度のうち、いずれか低い方の信頼度に基づき前記第2信頼度を演算する請求項5〜8のいずれか一項に記載の走行支援方法。
- 前記自車走行経路上における横方向の前記自車両の座標と、前記先行車走行経路上における横方向の前記先行車の座標をそれぞれ推定し、
前記統合割合で前記自車両の座標及び前記先行車の座標を統合させることで前記目標走行経路を演算する請求項1〜13のいずれか一項に記載の走行支援方法。 - 前記第1信頼度及び前記第2信頼度が所定の信頼度閾値より高い場合には、前記先行車走行経路より前記自車走行経路の割合が大きくなるように前記目標走行経路を演算する請求項1〜14のいずれか一項に記載の走行支援方法。
- 前記第1信頼度が所定の信頼度閾値より高く、前記第2信頼度が前記所定の信頼度より低い場合には、前記先行車走行経路より前記自車走行経路の割合が大きくなるように前記目標走行経路を演算する請求項1〜14のいずれか一項に記載の走行支援方法。
- 前記第1信頼度が所定の信頼度閾値より低く、前記第2信頼度が前記所定の信頼度閾値より高い場合には、前記自車走行経路より前記先行車走行経路の割合が大きくなるように前記目標走行経路を演算する請求項1〜14のいずれか一項に記載の走行支援方法。
- 前記自車両の目標走行経路を目標走路境界として演算し、
前記目標走路境界に基づいて目標走行軌跡を演算し、自車両の前記自車両を制御する請求項1〜15のいずれか一項に記載の走行支援方法。 - 前記自車両の目標走行経路を目標走行領域として演算し、
前記目標走行領域に基づいて目標走行軌跡を演算し、自車両の前記自車両を制御する請求項1〜15のいずれか一項に記載の走行支援方法。 - プロセッサを有する走行支援装置であって、
前記プロセッサは、
自車両の位置を推定し、
データベースから地図情報を取得し、
推定された前記自車両の位置及び前記地図情報に基づき、前記自車両が走行する自車走行経路を生成し、
前記自車走行経路の信頼度を示す第1信頼度を演算し、
前記自車両の前方を走行する先行車を検出し、
前記先行車両が走行する先行車走行経路を生成し、
前記先行車走行経路の形状に基づき、前記先行車走行経路の信頼度を示す第2信頼度を演算し、
前記第1信頼度と前記第2信頼度に基づき、前記自車走行経路と前記先行車走行経路とを統合するための統合割合を演算し、
演算された前記統合割合で前記自車走行経路と前記先行車走行経路とを統合することで、前記自車両の目標走行経路を演算し、
前記目標走行経路に基づいて前記自車両を制御する走行支援装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/IB2018/000890 WO2020002964A1 (ja) | 2018-06-29 | 2018-06-29 | 走行支援方法および走行支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020002964A1 true JPWO2020002964A1 (ja) | 2021-07-15 |
| JP6962469B2 JP6962469B2 (ja) | 2021-11-05 |
Family
ID=68986009
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020526707A Active JP6962469B2 (ja) | 2018-06-29 | 2018-06-29 | 走行支援方法および走行支援装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11845471B2 (ja) |
| EP (1) | EP3816965A4 (ja) |
| JP (1) | JP6962469B2 (ja) |
| CN (1) | CN112352270B (ja) |
| RU (1) | RU2758225C1 (ja) |
| WO (1) | WO2020002964A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11538287B2 (en) * | 2019-09-20 | 2022-12-27 | Sonatus, Inc. | System, method, and apparatus for managing vehicle data collection |
| JP2022548324A (ja) * | 2019-09-20 | 2022-11-17 | ソナタス インコーポレイテッド | 車両外通信制御のためのシステム、方法、及び装置 |
| US20230158975A1 (en) * | 2020-03-06 | 2023-05-25 | Sonatus, Inc. | System, method, and apparatus for managing vehicle automation |
| US11772583B2 (en) | 2020-03-06 | 2023-10-03 | Sonatus, Inc. | System, method, and apparatus for managing vehicle automation |
| JP7363621B2 (ja) * | 2020-03-17 | 2023-10-18 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| CN112990087B (zh) * | 2021-04-08 | 2022-08-19 | 济南博观智能科技有限公司 | 一种车道线检测方法、装置、设备及可读存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007249407A (ja) * | 2006-03-14 | 2007-09-27 | Omron Corp | 車両検出装置 |
| JP2015210720A (ja) * | 2014-04-28 | 2015-11-24 | トヨタ自動車株式会社 | 運転支援装置 |
| JP2016218737A (ja) * | 2015-05-20 | 2016-12-22 | 株式会社豊田中央研究所 | 先行車両推定装置及びプログラム |
| JP2017016403A (ja) * | 2015-07-01 | 2017-01-19 | 株式会社デンソー | 車線内走行制御装置、車線内走行制御方法 |
| JP2017054296A (ja) * | 2015-09-09 | 2017-03-16 | 株式会社デンソー | 走行支援装置及び走行支援方法 |
| JP2018024345A (ja) * | 2016-08-10 | 2018-02-15 | 株式会社Subaru | 車両の走行制御装置 |
| JP2018079848A (ja) * | 2016-11-17 | 2018-05-24 | 株式会社デンソー | 走行制御装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010235062A (ja) * | 2009-03-31 | 2010-10-21 | Equos Research Co Ltd | 車両制御装置、車両、及び車両制御プログラム |
| EP3023963B1 (en) * | 2013-07-19 | 2018-02-21 | Nissan Motor Co., Ltd | Drive assist device for vehicle, and drive assist method for vehicle |
| JP6154348B2 (ja) | 2014-03-28 | 2017-06-28 | 株式会社Soken | 走行経路生成装置 |
| JP5982034B1 (ja) * | 2015-03-30 | 2016-08-31 | 富士重工業株式会社 | 車両の運転支援システム |
| JP6432468B2 (ja) * | 2015-08-28 | 2018-12-05 | 株式会社デンソー | 車両制御装置及び走路推定方法 |
| JP6561704B2 (ja) * | 2015-09-09 | 2019-08-21 | 株式会社デンソー | 運転支援装置、及び運転支援方法 |
| JP2017182521A (ja) | 2016-03-31 | 2017-10-05 | 日立オートモティブシステムズ株式会社 | 車両用走行制御装置 |
| JP6583252B2 (ja) * | 2016-12-27 | 2019-10-02 | トヨタ自動車株式会社 | 運転支援装置 |
| JP6438516B2 (ja) * | 2017-03-31 | 2018-12-12 | 株式会社Subaru | 車両の走行制御装置 |
| KR20200029587A (ko) * | 2017-08-02 | 2020-03-18 | 닛산 지도우샤 가부시키가이샤 | 주행 지원 방법 및 주행 지원 장치 |
| JP6430087B1 (ja) * | 2018-03-23 | 2018-11-28 | 三菱電機株式会社 | 経路生成装置、および、車両制御システム |
-
2018
- 2018-06-29 WO PCT/IB2018/000890 patent/WO2020002964A1/ja active Application Filing
- 2018-06-29 JP JP2020526707A patent/JP6962469B2/ja active Active
- 2018-06-29 RU RU2020142786A patent/RU2758225C1/ru active
- 2018-06-29 EP EP18924837.0A patent/EP3816965A4/en active Pending
- 2018-06-29 CN CN201880094929.1A patent/CN112352270B/zh active Active
- 2018-06-29 US US17/254,950 patent/US11845471B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007249407A (ja) * | 2006-03-14 | 2007-09-27 | Omron Corp | 車両検出装置 |
| JP2015210720A (ja) * | 2014-04-28 | 2015-11-24 | トヨタ自動車株式会社 | 運転支援装置 |
| JP2016218737A (ja) * | 2015-05-20 | 2016-12-22 | 株式会社豊田中央研究所 | 先行車両推定装置及びプログラム |
| JP2017016403A (ja) * | 2015-07-01 | 2017-01-19 | 株式会社デンソー | 車線内走行制御装置、車線内走行制御方法 |
| JP2017054296A (ja) * | 2015-09-09 | 2017-03-16 | 株式会社デンソー | 走行支援装置及び走行支援方法 |
| JP2018024345A (ja) * | 2016-08-10 | 2018-02-15 | 株式会社Subaru | 車両の走行制御装置 |
| JP2018079848A (ja) * | 2016-11-17 | 2018-05-24 | 株式会社デンソー | 走行制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020002964A1 (ja) | 2020-01-02 |
| JP6962469B2 (ja) | 2021-11-05 |
| EP3816965A1 (en) | 2021-05-05 |
| EP3816965A4 (en) | 2022-02-09 |
| US20210155267A1 (en) | 2021-05-27 |
| RU2758225C1 (ru) | 2021-10-26 |
| US11845471B2 (en) | 2023-12-19 |
| CN112352270B (zh) | 2023-03-28 |
| CN112352270A (zh) | 2021-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6962469B2 (ja) | 走行支援方法および走行支援装置 | |
| US11238733B2 (en) | Group driving style learning framework for autonomous vehicles | |
| US10452074B2 (en) | Method and system for controlling autonomous driving vehicle reentering autonomous driving mode | |
| EP3378707B1 (en) | Collision prediction and forward airbag deployment system for autonomous driving vehicles | |
| EP3633408A1 (en) | Planning driven perception system for autonomous driving vehicles | |
| EP3598411A1 (en) | Method and system to predict object movement for autonomous driving vehicles | |
| US10569651B2 (en) | Speed control and steering control assistant based on pitch status and roll status of autonomous driving vehicle | |
| WO2019218353A1 (en) | Drifting correction between planning stage and controlling stage of operating autonomous driving vehicles | |
| WO2019200563A1 (en) | Map-less and localization-less lane following method for autonomous driving of autonomous driving vehicles on highway | |
| JPWO2020025991A1 (ja) | 走行軌跡補正方法、走行制御方法、及び走行軌跡補正装置 | |
| EP3659884B1 (en) | Predetermined calibration table-based method for operating an autonomous driving vehicle | |
| EP3659889B1 (en) | Predetermined calibration table-based vehicle throttle/brake assist system for level 2 autonomous vehicle | |
| US11780448B2 (en) | Vehicle behavior estimation method, vehicle control method, and vehicle behavior estimation device | |
| JP7004075B2 (ja) | 走行支援方法および走行支援装置 | |
| JPWO2018055689A1 (ja) | 車両の走行制御方法および走行制御装置 | |
| EP3698228B1 (en) | Optimal planner switch method for three point turn of autonomous driving vehicles | |
| CN111667719B (zh) | 用于控制自动驾驶车辆的速度的设备和方法及存储介质 | |
| EP3659886B1 (en) | Method to determine vehicle load of autonomous driving vehicle using predetermined load calibration tables | |
| EP3697659B1 (en) | Method and system for generating reference lines for autonomous driving vehicles | |
| RU2792191C1 (ru) | Способ оценки поведения транспортного средства, способ управления транспортным средством и устройство оценки поведения транспортного средства | |
| JP2020192942A (ja) | 走行支援方法および走行支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201221 |
|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A5211 Effective date: 20201221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210914 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210927 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6962469 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |