JP7691007B2 - 施工支援装置および施工支援方法 - Google Patents
施工支援装置および施工支援方法 Download PDFInfo
- Publication number
- JP7691007B2 JP7691007B2 JP2024005668A JP2024005668A JP7691007B2 JP 7691007 B2 JP7691007 B2 JP 7691007B2 JP 2024005668 A JP2024005668 A JP 2024005668A JP 2024005668 A JP2024005668 A JP 2024005668A JP 7691007 B2 JP7691007 B2 JP 7691007B2
- Authority
- JP
- Japan
- Prior art keywords
- underground
- construction support
- remote
- search
- objects
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/24—Safety devices, e.g. for preventing overload
- E02F9/245—Safety devices, e.g. for preventing overload for preventing damage to underground objects during excavation, e.g. indicating buried pipes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/261—Surveying the work-site to be treated
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/205—Remotely operated machines, e.g. unmanned vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Paleontology (AREA)
- Component Parts Of Construction Machinery (AREA)
- Processing Or Creating Images (AREA)
- Operation Control Of Excavators (AREA)
Description
地中埋設物の位置および姿勢をユーザに把握させるためには、2次元画像よりも3次元画像のほうが好ましいが、施工支援画像データはその情報量の豊富さゆえにデータ量が過多になる傾向がある。
施工を行う領域における地中に埋設している地中埋設物に関する情報に基づいて、前記地
中埋設物の上側の領域であって、前記地中埋設物の地表からの深さ位置に応じて識別可能に差別化されたオブジェクトを前記地中埋設物に沿って配置した施工支援画像データを生成する手段を有する。
前記地中埋設物に関する情報は、前記地中埋設物の位置の情報を含む
ことが好ましい。
前記施工支援画像データは、前記地中埋設物の地表からの深さの情報を含むことが好ましい。
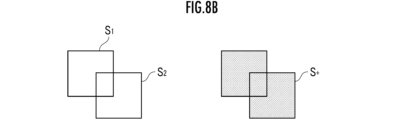
前記施工支援画像データは、前記地中埋設物に沿った複数の矩形のデータを含むことが好ましい。
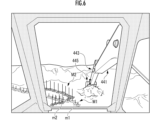
また、前記施工支援画像データが、作業環境を撮像した撮像画像に重畳して出力されることが好ましい。
地中埋設物に関する情報に基づいて、前記地中埋設物の上側の領域であって、前記地中埋設物の地表からの深さ位置に応じて識別可能に差別化されたオブジェクトを前記地中埋設物に沿って配置した施工支援画像データを生成する機能を実現させる
ためのプログラムである。
図1に示されている施工支援システムは、本発明の一実施形態としての施工支援装置10と、施工支援装置10と相互にネットワーク通信可能に構成されている遠隔操作装置20、作業機械40および地中探索機60と、により構成されている。施工支援装置が、施工支援装置10と、遠隔操作装置20、作業機械40および地中探索機60のうち1つまたは2つと、により構成されていてもよい。施工支援装置10および遠隔操作装置20の相互通信ネットワークと、施工支援装置10および作業機械40の相互通信ネットワークと、施工支援装置10および地中探索機60の相互通信ネットワークと、は同一であってもよく相違していてもよい。
施工支援装置10は、一または複数のコンピュータまたはサーバコンピュータにより構成されている。図1に示されているように、施工支援装置10は、データベース102と、地中探索結果認識要素120と、代表深さ位置決定要素121と、施工支援画像データ生成要素122と、を備えている。データベース102は、撮像画像データのほか、施工対象領域の地中埋設物の探索結果等を記憶保持する。データベース102は、施工支援装置10とは別個のデータベースサーバにより構成されていてもよい。施工支援装置10の各構成要素は、演算処理装置(シングルコアプロセッサまたはマルチコアプロセッサもしくはこれを構成するプロセッサコア)により構成され、メモリなどの記憶装置から必要なデータおよびソフトウェアを読み取り、当該データを対象として当該ソフトウェアにしたがった後述の演算処理を実行する。
図1に示されているように、遠隔操作装置20は、遠隔制御装置200と、遠隔入力インターフェース210と、遠隔出力インターフェース220と、を備えている。遠隔制御装置200は、演算処理装置(シングルコアプロセッサまたはマルチコアプロセッサもしくはこれを構成するプロセッサコア)により構成され、メモリなどの記憶装置から必要なデータおよびソフトウェアを読み取り、当該データを対象として当該ソフトウェアにしたがった演算処理を実行する。
図1に示されているように、作業機械40は、実機制御装置400と、実機入力インターフェース410と、実機出力インターフェース420と、実機無線通信機器422と、を備えている。実機制御装置400の構成要素のそれぞれは、演算処理装置(シングルコアプロセッサまたはマルチコアプロセッサもしくはこれを構成するプロセッサコア)により構成され、メモリなどの記憶装置から必要なデータおよびソフトウェアを読み取り、当該データを対象として当該ソフトウェアにしたがった演算処理を実行する。
図1に示されているように、地中探索機60は、探索制御装置600と、探索記憶装置602と、深さ位置測定要素611と、探索位置測定要素612と、探索無線通信機器624と、を備えている。
前記構成の施工支援装置および撮像機能制御システムの機能について図5に示されているフローチャートを用いて説明する。当該フローチャートにおいて「C●」というブロックは、記載の簡略のために用いられ、データの送信および/または受信を意味し、当該データの送信および/または受信を条件として分岐方向の処理が実行される条件分岐を意味している。
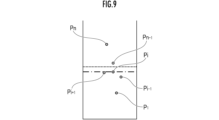
前記機能を発揮する施工支援装置10によれば、複数の地中探索エリアSi1、Si2、‥、Sim、Sim+1(図7Aおよび図7B参照)のうち少なくとも一部の地中探索エリアにおいて、地中探索機60により地表からの深さ位置が測定された地中埋設物の地中探索点P1,‥Pi-1,Pi,Pi+1,‥Pn-1,Pnのそれぞれの深さが代表深さ位置に集約される(図5/STEP121、図9参照)。そして、当該複数の地中探索エリアSi1、Si2、‥、Sim、Sim+1のそれぞれに配置されている代表深さ位置を表わすオブジェクトとしての閉曲面m1、m2が含まれている3次元画像を表わす施工支援画像データが生成される(図5/STEP122、図5参照)。
前記実施形態では、施工支援装置10が遠隔操作装置20、作業機械40および地中探索機60とは別個のコンピュータにより構成されていたが、他の実施形態として、施工支援装置10が、遠隔操作装置20、作業機械40または地中探索機60に搭載されていてもよい。
102‥データベース
120‥地中探索結果認識要素
121‥代表深さ位置決定要素
122‥施工支援画像データ生成要素
20‥遠隔操作装置
200‥遠隔制御装置
210‥遠隔入力インターフェース
211‥遠隔操作機構
220‥遠隔出力インターフェース
221‥遠隔画像出力装置
222‥遠隔音響出力装置
224‥遠隔無線通信機器
40‥作業機械
41‥下部走行体
42‥上部旋回体
42C‥キャブ(運転室)
44‥作業機構
445‥バケット
400‥実機制御装置
410‥実機入力インターフェース
420‥実機出力インターフェース
60‥地中探索機
600‥探索制御装置
602‥探索記憶装置
611‥深さ位置測定要素
612‥探索位置測定要素
624‥探索無線通信機器
m1、m2‥オブジェクト(閉曲面、立体物)
P1,‥Pi-1,Pi,Pi+1,‥Pn-1,Pn‥地中探索点
Si1、Si2、‥、Sim、Sim+1‥地中探索エリア。
Claims (6)
- 施工を行う領域における地中に埋設している地中埋設物に関する情報に基づいて、前記地中埋設物の上側の領域であって、前記地中埋設物の地表からの深さ位置に応じて識別可能に差別化されたオブジェクトを前記地中埋設物に沿って配置した施工支援画像データを生成する手段を有する施工支援装置。
- 前記地中埋設物に関する情報は、前記地中埋設物の位置の情報を含む請求項1に記載の施工支援装置。
- 前記施工支援画像データは、前記地中埋設物の地表からの深さの情報を含む請求項1に記載の施工支援装置。
- 前記施工支援画像データは、前記地中埋設物に沿った複数の矩形のデータを含む請求項1乃至3のいずれか1項に記載の施工支援装置。
- 前記施工支援画像データが、作業環境を撮像した撮像画像に重畳して出力される請求項1乃至3のいずれか1項に記載の施工支援装置。
- コンピュータに、施工を行う領域における地中に埋設している地中埋設物に関する情報に基づいて、前記地中埋設物の上側の領域であって、前記地中埋設物の地表からの深さ位置に応じて識別可能に差別化されたオブジェクトを前記地中埋設物に沿って配置した施工支援画像データを生成する機能を実現させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024005668A JP7691007B2 (ja) | 2022-07-29 | 2024-01-17 | 施工支援装置および施工支援方法 |
| JP2025090531A JP2025120205A (ja) | 2022-07-29 | 2025-05-30 | 施工支援装置および施工支援方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022121870A JP7597087B2 (ja) | 2022-07-29 | 2022-07-29 | 施工支援装置および施工支援方法 |
| JP2024005668A JP7691007B2 (ja) | 2022-07-29 | 2024-01-17 | 施工支援装置および施工支援方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022121870A Division JP7597087B2 (ja) | 2022-07-29 | 2022-07-29 | 施工支援装置および施工支援方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2025090531A Division JP2025120205A (ja) | 2022-07-29 | 2025-05-30 | 施工支援装置および施工支援方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024032802A JP2024032802A (ja) | 2024-03-12 |
| JP7691007B2 true JP7691007B2 (ja) | 2025-06-11 |
Family
ID=89706674
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022121870A Active JP7597087B2 (ja) | 2022-07-29 | 2022-07-29 | 施工支援装置および施工支援方法 |
| JP2024005668A Active JP7691007B2 (ja) | 2022-07-29 | 2024-01-17 | 施工支援装置および施工支援方法 |
| JP2025090531A Pending JP2025120205A (ja) | 2022-07-29 | 2025-05-30 | 施工支援装置および施工支援方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022121870A Active JP7597087B2 (ja) | 2022-07-29 | 2022-07-29 | 施工支援装置および施工支援方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2025090531A Pending JP2025120205A (ja) | 2022-07-29 | 2025-05-30 | 施工支援装置および施工支援方法 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4512964A4 (ja) |
| JP (3) | JP7597087B2 (ja) |
| CN (1) | CN119585486A (ja) |
| WO (1) | WO2024024948A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7655428B1 (ja) | 2024-03-22 | 2025-04-02 | コベルコ建機株式会社 | 掘削支援装置、掘削システム、掘削支援方法、建設機械、及びプログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003075546A (ja) | 2001-09-06 | 2003-03-12 | Toyo Machine Kogyo Kk | 地中埋設管の探知システム |
| JP2012133471A (ja) | 2010-12-20 | 2012-07-12 | Kokusai Kogyo Co Ltd | 画像合成装置、画像合成プログラム、及び画像合成システム |
| JP2015114823A (ja) | 2013-12-11 | 2015-06-22 | 三菱電機株式会社 | 携帯用端末装置 |
| WO2019124549A1 (ja) | 2017-12-21 | 2019-06-27 | 住友建機株式会社 | ショベル及びショベルの管理システム |
| JP2023128880A (ja) | 2022-03-04 | 2023-09-14 | 戸田建設株式会社 | 推定結果表示システム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4642288B2 (ja) | 2001-08-09 | 2011-03-02 | 株式会社小松製作所 | 地下埋設物掘削システム |
| JP3728433B2 (ja) * | 2002-09-20 | 2005-12-21 | エヌ・ティ・ティ・インフラネット株式会社 | ケーブル位置情報管理システム及びケーブル位置情報管理方法並びにケーブル位置情報管理プログラム |
| JP4024201B2 (ja) * | 2003-10-29 | 2007-12-19 | 日立建機株式会社 | 移動式作業機械の作業管理装置 |
| WO2014110502A1 (en) * | 2013-01-11 | 2014-07-17 | The Regents Of The University Of Michigan | Monitoring proximity of objects at construction jobsites via three-dimensional virtuality in real-time |
| JP6463052B2 (ja) * | 2014-09-11 | 2019-01-30 | 大阪瓦斯株式会社 | 探査装置 |
| US10748427B1 (en) * | 2019-05-24 | 2020-08-18 | Saudi Arabian Oil Company | Systems and methods for preventing damage to unseen utility assets |
| JP7322616B2 (ja) * | 2019-09-12 | 2023-08-08 | 東京電力ホールディングス株式会社 | 情報処理装置、情報処理方法、プログラム及び掘削システム |
| JP7408491B2 (ja) * | 2020-06-04 | 2024-01-05 | 株式会社クボタ | 作業機の掘削支援システム、及び作業機の掘削支援方法 |
| IL275318A (en) * | 2020-06-11 | 2022-01-01 | G A A A Global Infrastructures Tech Ltd | A system for locating an underground infrastructure line |
-
2022
- 2022-07-29 JP JP2022121870A patent/JP7597087B2/ja active Active
-
2023
- 2023-07-28 CN CN202380054898.8A patent/CN119585486A/zh active Pending
- 2023-07-28 WO PCT/JP2023/027785 patent/WO2024024948A1/ja not_active Ceased
- 2023-07-28 EP EP23846678.3A patent/EP4512964A4/en active Pending
-
2024
- 2024-01-17 JP JP2024005668A patent/JP7691007B2/ja active Active
-
2025
- 2025-05-30 JP JP2025090531A patent/JP2025120205A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003075546A (ja) | 2001-09-06 | 2003-03-12 | Toyo Machine Kogyo Kk | 地中埋設管の探知システム |
| JP2012133471A (ja) | 2010-12-20 | 2012-07-12 | Kokusai Kogyo Co Ltd | 画像合成装置、画像合成プログラム、及び画像合成システム |
| JP2015114823A (ja) | 2013-12-11 | 2015-06-22 | 三菱電機株式会社 | 携帯用端末装置 |
| WO2019124549A1 (ja) | 2017-12-21 | 2019-06-27 | 住友建機株式会社 | ショベル及びショベルの管理システム |
| JP2023128880A (ja) | 2022-03-04 | 2023-09-14 | 戸田建設株式会社 | 推定結果表示システム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN119585486A (zh) | 2025-03-07 |
| JP2024032802A (ja) | 2024-03-12 |
| EP4512964A4 (en) | 2025-10-22 |
| WO2024024948A1 (ja) | 2024-02-01 |
| JP7597087B2 (ja) | 2024-12-10 |
| JP2025120205A (ja) | 2025-08-15 |
| JP2024018497A (ja) | 2024-02-08 |
| EP4512964A1 (en) | 2025-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2022209235B2 (en) | Display control device and display control method | |
| JP6867132B2 (ja) | 作業機械の検出処理装置及び作業機械の検出処理方法 | |
| AU2019292457B2 (en) | Display control device, display control system, and display control method | |
| KR102637524B1 (ko) | 작업 기계 | |
| JP6794449B2 (ja) | 管理システム | |
| WO2019049475A1 (ja) | 施工管理装置および施工管理方法 | |
| US12123171B2 (en) | Autonomous control of operations of powered earth-moving vehicles using data from on-vehicle perception systems | |
| JP2020117982A (ja) | 作業機械 | |
| JP2019190193A (ja) | 作業機械 | |
| JP2021001436A (ja) | 作業機械 | |
| JP7691007B2 (ja) | 施工支援装置および施工支援方法 | |
| CN108779985B (zh) | 施工管理系统 | |
| JP7552494B2 (ja) | 施工支援システムおよび施工支援方法 | |
| JP2024052764A (ja) | 表示制御装置及び表示方法 | |
| WO2023100533A1 (ja) | 画像表示システム、遠隔操作支援システムおよび画像表示方法 | |
| JP6616149B2 (ja) | 施工方法、作業機械の制御システム及び作業機械 | |
| JP7107792B2 (ja) | 建設機械 | |
| JP2022026596A (ja) | 作業機械および施工支援システム | |
| JP2022129500A (ja) | 地形情報管理システムおよび作業機械 | |
| CN114731388A (zh) | 作业支援服务器、作业支援方法以及作业支援系统 | |
| JP2024057362A (ja) | 作業支援システム、遠隔操作支援システム、作業支援方法および表示装置 | |
| WO2025052859A1 (ja) | 作業支援システムおよび作業支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240117 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240520 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20240520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240709 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241029 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20241224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250430 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250513 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7691007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |