JP7682004B2 - 演算装置および演算方法 - Google Patents
演算装置および演算方法 Download PDFInfo
- Publication number
- JP7682004B2 JP7682004B2 JP2021061390A JP2021061390A JP7682004B2 JP 7682004 B2 JP7682004 B2 JP 7682004B2 JP 2021061390 A JP2021061390 A JP 2021061390A JP 2021061390 A JP2021061390 A JP 2021061390A JP 7682004 B2 JP7682004 B2 JP 7682004B2
- Authority
- JP
- Japan
- Prior art keywords
- boom
- arm
- sensor
- load
- attachment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/08—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles
- G01G19/10—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles having fluid weight-sensitive devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2029—Controlling the position of implements in function of its load, e.g. modifying the attitude of implements in accordance to vehicle speed
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
- E02F9/265—Sensors and their calibration for indicating the position of the work tool with follow-up actions (e.g. control signals sent to actuate the work tool)
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/08—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles
- G01G19/083—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles lift truck scale
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/40—Special vehicles
- B60Y2200/41—Construction vehicles, e.g. graders, excavators
- B60Y2200/412—Excavators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/40—Special vehicles
- B60Y2200/41—Construction vehicles, e.g. graders, excavators
- B60Y2200/415—Wheel loaders
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Operation Control Of Excavators (AREA)
Description
<作業機械の構成>
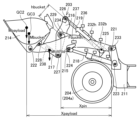
図1は、本開示の第一実施形態に基づく作業機械の一例としての油圧ショベル100の構成を概略的に示す側面図である。図1に示されるように、本実施の形態の油圧ショベル100は、走行体1と、旋回体2と、作業機3とを主に有している。走行体1と旋回体2とにより、油圧ショベル100の車体が構成されている。
次に、作業機械のシステムの概略構成について図2を用いて説明する。図2は、図1に示される作業機械のシステムの概略構成を示すブロック図である。
次に、コントローラ10内の機能ブロックについて図3を用いて説明する。図3は、図2に示されるコントローラ10内の機能ブロックを示す図である。
以下、バケット3cに積載された荷Lの重量Mpayloadの算出方法の詳細について説明する。荷Lの重量Mpayloadは、荷Lの運搬中における作業機3を構成する3つのリンク(ブーム3a、アーム3b、バケット3c)それぞれに関して位置センサからの情報と圧力センサからの情報とからセットアップされた3つの関係式のいずれか2つから算出される。以下、リンクとしてブーム3aとバケット3cとを対象にし、関係式としてモーメントの釣り合い式をセットアップして、荷Lの重量Mpayloadの算出方法を説明する。


第一実施形態では、ブームボトムピン5aまわりのモーメントの釣り合い式と、アームトップピン5cまわりのモーメントの釣り合い式との2つの釣り合い式から、バケット3cに積載された荷Lの重量Mpayloadを算出する例について説明した。この例に限られず、コントローラ10は、ブームボトムピン5aまわりのモーメントの釣り合い式、ブームトップピン5bまわりのモーメントの釣り合い式、アームトップピン5cまわりのモーメントの釣り合い式のうちのいずれか2つの釣り合い式から、バケット3cに積載された荷Lの重量Mpayloadを算出することができる。第二実施形態では、ブームボトムピン5aまわりのモーメントの釣り合い式と、ブームトップピン5bまわりのモーメントの釣り合い式との2つの釣り合い式から、重量Mpayloadを算出する例について説明する。

第一および第二実施形態では、作業機3の先端のアタッチメントとしてバケット3cを備える油圧ショベル100について説明した。アタッチメントはバケット3cに限られず、作業の種類に応じて、アタッチメントが、グラップル、リフティングマグネットなどに付け替えられることがある。第三実施形態では、アタッチメントとしてリフティングマグネット103を備える油圧ショベル100について説明する。
第一から第三実施形態では、作業機械が油圧ショベル100である例について説明した。油圧ショベル100に限られず、多リンク機構の作業機3を備え作業機3が荷Lを運搬する作業機械に、実施形態の思想を適用することで、作業機3の運搬する荷Lの重量を精度よく算出することが可能である。たとえば作業機械は、ホイールローダ、バックホーローダ、スキッドステアローダなどであってもよい。

Claims (17)
- 作業機を備える作業機械の、前記作業機の運搬する荷の重量を算出する演算装置であって、
前記作業機械は、
車体と、
前記車体に支持されたブームボトムピンと、
前記ブームボトムピンにより前記車体に回転可能に連結されたブームと、
前記ブームの先端に取り付けられたブームトップピンと、
前記ブームトップピンにより前記ブームに回転可能に連結されたアームと、
前記アームの先端に取り付けられたアームトップピンと、
前記アームトップピンにより前記アームに回転可能に連結されたアタッチメントとを備え、
前記ブームボトムピンまわりのモーメントの釣り合い式、前記ブームトップピンまわりのモーメントの釣り合い式、前記アームトップピンまわりのモーメントの釣り合い式のうちのいずれか2つの釣り合い式から、前記荷の重量を算出する、演算装置。 - 前記作業機械は、
前記ブームを前記車体に対して相対回転させる推力を発生するアクチュエータと、
前記車体に対する前記ブームの角度を検知するセンサとを備え、
前記アクチュエータの発生する推力と、前記センサの検知結果とに基づいて、前記ブームボトムピンまわりのモーメントの釣り合い式を立てる、請求項1に記載の演算装置。 - 前記作業機械は、
前記アームを前記ブームに対して相対回転させる推力を発生するアクチュエータと、
前記ブームに対する前記アームの角度を検知するセンサとを備え、
前記アクチュエータの発生する推力と、前記センサの検知結果とに基づいて、前記ブームトップピンまわりのモーメントの釣り合い式を立てる、請求項1に記載の演算装置。 - 前記作業機械は、
前記アタッチメントを前記アームに対して相対回転させる推力を発生するアクチュエータと、
前記アームに対する前記アタッチメントの角度を検知するセンサとを備え、
前記アクチュエータの発生する推力と、前記センサの検知結果とに基づいて、前記アームトップピンまわりのモーメントの釣り合い式を立てる、請求項1に記載の演算装置。 - 前記作業機械は、前記アクチュエータと前記アームとを連結するリンク部材をさらに備え、
前記センサは、前記リンク部材に取り付けられている、請求項4に記載の演算装置。 - 前記アタッチメントは、リフティングマグネットである、請求項1から請求項5のいずれか1項に記載の演算装置。
- 前記いずれか2つの釣り合い式から、前記荷の重心位置を算出する、請求項1から請求項6のいずれか1項に記載の演算装置。
- 作業機を備える作業機械の、前記作業機の運搬する荷の重量を算出する演算装置であって、
前記作業機械は、
車体と、
前記車体に支持されたブームボトムピンと、
前記ブームボトムピンにより前記車体に回転可能に連結されたブームと、
前記ブームの先端に取り付けられたブームトップピンと、
前記ブームトップピンにより前記ブームに回転可能に連結されたアタッチメントと、
前記ブームに支持され、前記アタッチメントとともに前記ブームに対して回転可能な回動部材とを備え、
前記ブームボトムピンまわりのモーメントの釣り合い式と、前記回動部材の回転中心まわりのモーメントの釣り合い式との2つの釣り合い式から、前記荷の重量を算出する、演算装置。 - 前記作業機械は、
前記ブームを前記車体に対して相対回転させる推力を発生するアクチュエータと、
前記車体に対する前記ブームの角度を検知するセンサとを備え、
前記アクチュエータの発生する推力と、前記センサの検知結果とに基づいて、前記ブームボトムピンまわりのモーメントの釣り合い式を立てる、請求項8に記載の演算装置。 - 前記作業機械は、
前記アタッチメントを前記ブームに対して相対回転させる推力を発生するアクチュエータと、
前記ブームに対する前記アタッチメントの角度を検知するセンサとを備え、
前記アクチュエータの発生する推力と、前記センサの検知結果とに基づいて、前記回転中心まわりのモーメントの釣り合い式を立てる、請求項8に記載の演算装置。 - 前記2つの釣り合い式から、前記荷の重心位置を算出する、請求項8から請求項10のいずれか1項に記載の演算装置。
- 作業機を備える作業機械の、前記作業機の運搬する荷の重量を算出する演算装置であって、
前記作業機械は、
車体と、
前記車体に支持されたブームボトムピンと、
前記ブームボトムピンにより前記車体に一端を回転可能に連結されたブームと、
前記ブームの他端に取り付けられたブームトップピンと、
前記ブームトップピンにより前記ブームの他端に一端を回転可能に連結されたアームと、
前記アームの他端に取り付けられたアームトップピンと、
前記アームトップピンにより前記アームの他端に一端を回転可能に連結されたアタッチメントと、
前記ブームを駆動して回転動作させるブーム油圧シリンダと、
前記アームを駆動して回転動作させるアーム油圧シリンダと、
前記アタッチメントを駆動して回転動作させるアタッチメント油圧シリンダと、
前記ブーム油圧シリンダに取り付けられ前記ブーム油圧シリンダの作動油圧力情報を出力するブーム圧力センサと、前記アーム油圧シリンダに取り付けられ前記アーム油圧シリンダの作動油圧力情報を出力するアーム圧力センサと、前記アタッチメント油圧シリンダに取り付けられ前記アタッチメント油圧シリンダの作動油圧力情報を出力するアタッチメント圧力センサと、のうちの少なくとも2つのセンサを含む、圧力センサと、
前記車体に対する前記ブームの位置を得るためのブーム情報を出力するブーム位置センサと、前記ブームに対する前記アームの位置を得るためのアーム情報を出力するアーム位置センサと、前記アームに対する前記アタッチメントの位置を得るためのアタッチメント情報を出力するアタッチメント位置センサと、を備え、
前記荷の運搬における、前記ブーム油圧シリンダの前記作動油圧力情報と前記ブーム情報とから生成される第一の関係式と、前記アーム油圧シリンダの前記作動油圧力情報と前記アーム情報とから生成される第二の関係式と、前記アタッチメント油圧シリンダの前記作動油圧力情報と前記アタッチメント情報とから生成される第三の関係式と、のうちのいずれか2つの関係式から、前記荷の重量を算出し、
前記圧力センサは、前記2つの関係式に対応する2つのセンサを少なくとも含む、演算装置。 - 前記ブーム位置センサは、前記車体に対する前記ブームの角度を検知するセンサであり、
前記アーム位置センサは、前記ブームに対する前記アームの角度を検知するセンサであり、
前記アタッチメント位置センサは、前記アームに対する前記アタッチメントの角度を検知するセンサである、請求項12に記載の演算装置。 - 前記第一の関係式は、前記荷の運搬の際の、前記ブームボトムピンまわりのモーメントの釣り合い式であり、
前記第二の関係式は、前記荷の運搬の際の、前記ブームトップピンまわりのモーメントの釣り合い式であり、
前記第三の関係式は、前記荷の運搬の際の、前記アームトップピンまわりのモーメントの釣り合い式である、請求項12または請求項13に記載の演算装置。 - 作業機を備える作業機械の、前記作業機の運搬する荷の重量を算出する演算方法であって、
前記作業機は、第1回転中心を軸として回動するブームと、第2回転中心を軸として回動するアームと、第3回転中心を軸として回動するアタッチメントと、を部材として有し、
前記部材について、前記第1回転中心、前記第2回転中心および前記第3回転中心のうちのいずれか2つの回転中心回りの運動の関係式を立式することと、
前記部材の各々の重量および重心位置を取得することと、
前記荷の運搬時における前記部材の位置を取得することと、
前記関係式の前記運動に対応する推力を取得することと、
前記部材の前記重心位置と前記位置とから、前記荷の運搬時における前記部材の各々の重心位置と、対応する前記第1回転中心、前記第2回転中心および前記第3回転中心のそれぞれとの水平方向距離を演算することと、
前記関係式と、前記取得された情報と、前記演算された情報とにより、前記作業機の運搬する前記荷の重量を演算することと、を備える、演算方法。 - 前記部材の前記位置を、前記部材の姿勢を示す角度から取得する、請求項15に記載の演算方法。
- 前記関係式は、前記運動の回転中心まわりのモーメントの釣り合い式である、請求項15または請求項16に記載の演算方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021061390A JP7682004B2 (ja) | 2021-03-31 | 2021-03-31 | 演算装置および演算方法 |
| KR1020237030216A KR20230138020A (ko) | 2021-03-31 | 2022-01-24 | 연산 장치 및 연산 방법 |
| CN202280019932.3A CN116964280A (zh) | 2021-03-31 | 2022-01-24 | 运算装置以及运算方法 |
| DE112022000577.7T DE112022000577T5 (de) | 2021-03-31 | 2022-01-24 | Berechnungsvorrichtung und ein Berechnungsverfahren |
| PCT/JP2022/002400 WO2022209214A1 (ja) | 2021-03-31 | 2022-01-24 | 演算装置および演算方法 |
| US18/283,595 US20240167247A1 (en) | 2021-03-31 | 2022-01-24 | Computing device and computing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021061390A JP7682004B2 (ja) | 2021-03-31 | 2021-03-31 | 演算装置および演算方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022157266A JP2022157266A (ja) | 2022-10-14 |
| JP2022157266A5 JP2022157266A5 (ja) | 2024-03-12 |
| JP7682004B2 true JP7682004B2 (ja) | 2025-05-23 |
Family
ID=83458615
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021061390A Active JP7682004B2 (ja) | 2021-03-31 | 2021-03-31 | 演算装置および演算方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20240167247A1 (ja) |
| JP (1) | JP7682004B2 (ja) |
| KR (1) | KR20230138020A (ja) |
| CN (1) | CN116964280A (ja) |
| DE (1) | DE112022000577T5 (ja) |
| WO (1) | WO2022209214A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4310045A1 (en) * | 2022-07-19 | 2024-01-24 | Volvo Construction Equipment AB | Operator assist system, working machine and method for annihilation or amplifying oscillation |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019157362A (ja) | 2018-03-07 | 2019-09-19 | 日立建機株式会社 | 作業機械 |
| JP2020164325A (ja) | 2019-03-29 | 2020-10-08 | 住友重機械工業株式会社 | 作業機械 |
| JP2021021263A (ja) | 2019-07-29 | 2021-02-18 | 住友重機械工業株式会社 | 作業機械 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07252091A (ja) * | 1994-03-15 | 1995-10-03 | Sumitomo Constr Mach Co Ltd | クレーン仕様ショベルの吊り荷重量演算装置 |
| JPH10245874A (ja) | 1997-03-06 | 1998-09-14 | Sumitomo Constr Mach Co Ltd | 油圧ショベルの積荷重量演算装置 |
| CN102914351B (zh) * | 2012-10-11 | 2015-01-21 | 中钢集团衡阳重机有限公司 | 电动挖掘机称重方法 |
| CN106225896A (zh) * | 2016-08-18 | 2016-12-14 | 厦门海普智能科技有限公司 | 一种叉装车自动称重系统及其方法 |
| CN108291387B (zh) * | 2016-11-09 | 2020-11-10 | 株式会社小松制作所 | 作业机械以及作业机械的控制方法 |
| JP6970581B2 (ja) * | 2017-10-04 | 2021-11-24 | 株式会社小松製作所 | 作業機械、作業機械を含むシステムおよび作業機械の制御方法 |
| JP6707208B2 (ja) * | 2017-10-27 | 2020-06-10 | 日立建機株式会社 | 積込量積算装置および積込量積算システム |
| CN109440855B (zh) * | 2018-10-30 | 2020-11-20 | 柳州柳工挖掘机有限公司 | 一种挖掘机工作效率检测方法及系统 |
| CN109680738B (zh) * | 2019-02-12 | 2024-02-27 | 徐州徐工挖掘机械有限公司 | 一种液压挖掘机物料在线称重装置及方法 |
| JP7289701B2 (ja) * | 2019-03-29 | 2023-06-12 | 住友重機械工業株式会社 | ショベル |
| JP7374763B2 (ja) * | 2019-12-27 | 2023-11-07 | 株式会社小松製作所 | 作業機械、計量方法、および作業機械を含むシステム |
| JP7374762B2 (ja) * | 2019-12-27 | 2023-11-07 | 株式会社小松製作所 | 作業機械、計量方法、および作業機械を含むシステム |
-
2021
- 2021-03-31 JP JP2021061390A patent/JP7682004B2/ja active Active
-
2022
- 2022-01-24 WO PCT/JP2022/002400 patent/WO2022209214A1/ja not_active Ceased
- 2022-01-24 KR KR1020237030216A patent/KR20230138020A/ko not_active Ceased
- 2022-01-24 US US18/283,595 patent/US20240167247A1/en active Pending
- 2022-01-24 CN CN202280019932.3A patent/CN116964280A/zh active Pending
- 2022-01-24 DE DE112022000577.7T patent/DE112022000577T5/de active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019157362A (ja) | 2018-03-07 | 2019-09-19 | 日立建機株式会社 | 作業機械 |
| JP2020164325A (ja) | 2019-03-29 | 2020-10-08 | 住友重機械工業株式会社 | 作業機械 |
| JP2021021263A (ja) | 2019-07-29 | 2021-02-18 | 住友重機械工業株式会社 | 作業機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116964280A (zh) | 2023-10-27 |
| JP2022157266A (ja) | 2022-10-14 |
| KR20230138020A (ko) | 2023-10-05 |
| WO2022209214A1 (ja) | 2022-10-06 |
| DE112022000577T5 (de) | 2023-12-28 |
| US20240167247A1 (en) | 2024-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107407074B (zh) | 显示系统及工程机械 | |
| US9663917B2 (en) | Work vehicle, bucket device, and method for obtaining tilt angle | |
| KR102581329B1 (ko) | 작업 기계, 시스템 및 작업 기계의 제어 방법 | |
| JP7289701B2 (ja) | ショベル | |
| CN111441406B (zh) | 用于坡度控制的鸟瞰校准 | |
| JP7353958B2 (ja) | 作業機械、計測方法およびシステム | |
| CN112334618B (zh) | 液压挖掘机 | |
| JP7122980B2 (ja) | 作業機械のシステム及び方法 | |
| JP7682004B2 (ja) | 演算装置および演算方法 | |
| US20240337089A1 (en) | Work machine and method for controlling work machine | |
| JP7786910B2 (ja) | 作業機械を制御するためのシステム、方法およびプログラム | |
| JP7551021B2 (ja) | 作業機モーメントを推定する方法 | |
| US20220389688A1 (en) | Work machine, weighing method, and system including work machine | |
| WO2022102298A1 (ja) | 積載作業支援システム | |
| WO2024090014A1 (ja) | スイング角度較正方法、姿勢検出方法、スイング角度較正システムおよび姿勢検出システム | |
| CN117836489A (zh) | 用于控制作业机械的系统以及方法 | |
| JP2024154698A (ja) | 作業機械および積荷質量算出方法 | |
| JP2024127611A (ja) | 作業機械 | |
| JP2024120686A (ja) | 作業機械及び作業機械の支援システム | |
| JP2024120685A (ja) | 作業機械及び作業機械の支援システム | |
| WO2025204941A1 (ja) | システム、作業機械、および制御方法 | |
| WO2023053700A1 (ja) | 作業機械を制御するためのシステムおよび方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240304 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250513 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7682004 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |