JP7669727B2 - 製品管理システム - Google Patents
製品管理システム Download PDFInfo
- Publication number
- JP7669727B2 JP7669727B2 JP2021035717A JP2021035717A JP7669727B2 JP 7669727 B2 JP7669727 B2 JP 7669727B2 JP 2021035717 A JP2021035717 A JP 2021035717A JP 2021035717 A JP2021035717 A JP 2021035717A JP 7669727 B2 JP7669727 B2 JP 7669727B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- products
- product
- surplus
- conveying direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 111
- 230000008569 process Effects 0.000 claims description 110
- 238000012545 processing Methods 0.000 claims description 41
- 230000006870 function Effects 0.000 claims description 21
- 230000007812 deficiency Effects 0.000 claims description 9
- 238000003384 imaging method Methods 0.000 claims 2
- 238000007726 management method Methods 0.000 description 135
- 238000010191 image analysis Methods 0.000 description 56
- 238000010586 diagram Methods 0.000 description 20
- 238000012549 training Methods 0.000 description 8
- 238000013473 artificial intelligence Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 3
- 238000005401 electroluminescence Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Description
図1は、製品管理システム1の構成例を示す図である。製品管理システム1は、管理装置100、ゲート200、及びカメラ300を有する。製品管理システム1は、ゲート200を通過する製品の入出庫を管理するシステムである。製品は、ゲート200を右方向から左方向(D1)に搬送される場合、出庫されており、逆方向(D2)に搬送されている場合、入庫されていると判定される。
図2は、製品管理システム1のソフトウェア構成の例を示す図である。
図3は、製品管理システム1の構成例を表す図である。製品管理システム1は、CPU(Central Processing Unit)110、ストレージ120、メモリ130、カメラ300、ゲート200、及びディスプレイ160を有する。
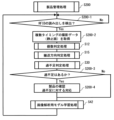
図4は、製品管理処理のシーケンスの例を示す図である。以下、各部の処理について説明する。
第1の実施の形態について説明する。第1の実施の形態において、撮影データは動画データを使用する。管理装置100は、動画データに基づき、製品の動きを検出し、製品の動きの検出を契機として、製品管理処理を実行する。
図6は、過不足判定処理S30の処理フローチャートの例を示す図である。管理装置100は、画像個数と読出個数が一致しているか否かを判定する(S30-1)。
第2の実施の形態について説明する。第2の実施の形態において、管理装置100は、第1の実施の形態における過不足判定処理S30に代替し、過不足判定処理S60を実行する。過不足判定処理S60は、入庫及び出庫する製品の一覧を含む入出庫リスト(製品リスト)を、過不足判定に使用する処理である。入出庫リストは、例えば、搬送方向、搬送する製品の識別子を含む識別情報、搬送する製品の個数(個数情報)などの情報を含む。
管理装置100は、過不足判定処理S60において、入出庫リストの搬送個数に代替し、入出庫リストの搬送製品の識別子(ID)を用いてもよい。この場合、管理装置100は、入出庫リストの搬送製品の識別子と、RFIDの読出結果における製品の識別子が全て一致(過不足なく一致)するか否かを確認する。そして、管理装置100は、識別子が全て一致する場合、さらに、画像個数と入出庫リストの搬送個数(読出個数と同じ)が一致するか否かを判定する。管理装置100は、識別子、搬送個数の全てが一致する場合、製品に過不足がないと判定し、一部でも一致しない場合、製品に過不足があると判定する。
第3の実施の形態について説明する。第3の実施の形態において、撮影データは静止画データを使用する。管理装置100は、RFIDの読み出しを検出すると、少なくとも2つのタイミングで撮影した静止画データに基づき、製品の搬送方向を判定し、製品管理を実行する。
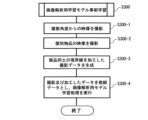
第4の実施の形態について説明する。第4の実施の形態では、画像解析用学習モデルの学習方法について説明する。
画像解析用学習モデル学習処理S42について説明する。画像解析用学習モデル学習処理S42は、以下の2つのパターンにおいて実行される処理である。
上述した実施の形態は、それぞれ組み合わせて実行されてもよい。例えば、第1の実施の形態における動画に代替し、静止画を使用してもよい。この場合、定期的に静止画を撮影し、製品が動いたことを判定するようにしてもよい。また、事前学習、運用中の学習など、学習に要する時間や工数を考慮し、適宜実施するようにしてもよい。
10 :画像処理部
11 :画像解析用学習モデル学習部
12 :個数判定部
13 :搬送方向判定部
14 :製品管理部
15 :入出庫リスト取得部
16 :過不足判定部
17 :学習用データ作成部
20 :RFID読出部
30 :撮影部
50 :画像解析用学習モデル
100 :管理装置
110 :CPU
120 :ストレージ
121 :RFID読出プログラム
122 :撮影プログラム
123 :画像処理プログラム
124 :製品管理プログラム
125 :画像解析用学習モデル学習プログラム
130 :メモリ
160 :ディスプレイ
200 :ゲート
300 :カメラ
Claims (6)
- 製品に付されたRFタグから製品の識別情報を読み出すRFIDリーダ機能を有するゲート部と、
前記ゲート部の周辺を撮影する撮影部と、
前記撮影部が撮影したデータと前記ゲート部が読み出した識別情報に基づき、前記ゲート部を通過する製品を管理する管理部と、を有する製品管理システムであって、
前記管理部は、
前記撮影部が撮影した画像データに基づき、搬送される製品が入庫であるか出庫であるかを示す搬送方向を判定する搬送方向判定処理と、前記搬送される製品の個数を判定する個数判定処理とを実行する画像処理部と、
前記ゲート部が読み出した識別情報の個数と、前記画像処理部によって判定された前記搬送される製品の個数とを比較し、前記識別情報の個数と前記画像処理部によって判定された個数との一致又は不一致を判定したのち、前記搬送される製品が入庫であるか出庫であるかをさらに判定することにより、前記搬送される製品の過不足を前記搬送方向ごとに判定する過不足判定部とを有する
製品管理システム。 - 製品に付されたRFタグから製品の識別情報を読み出すRFIDリーダ機能を有するゲート部と、
前記ゲート部の周辺を撮影する撮影部と、
前記撮影部が撮影したデータと前記ゲート部が読み出した識別情報に基づき、前記ゲート部を通過する製品を管理する管理部と、を有する製品管理システムであって、
前記管理部は、
前記撮影部が撮影した画像データに基づき、搬送される製品が入庫であるか出庫であるかを示す搬送方向を判定する搬送方向判定処理と、前記搬送される製品の個数を判定する個数判定処理とを実行する画像処理部と、
前記ゲート部が読み出した識別情報の個数と、前記画像処理部によって判定された前記搬送される製品の個数とを比較し、前記搬送される製品の過不足を前記搬送方向ごとに判定する過不足判定部とを有し、
前記画像処理部は、前記撮影部が撮影したデータと、前記データに基づき判定された搬送方向の結果とから生成された学習用データによって学習されるモデルを用いて、前記搬送される製品の搬送方向を判定する、
製品管理システム。 - 前記画像データは動画データであって、
前記画像処理部は、前記動画データにおいて、前記搬送される製品の搬送が開始されたことを認識したとき、前記ゲート部に前記RFタグの読み出しを行うよう指示する
請求項1又は2に記載の製品管理システム。 - 前記過不足判定部は、さらに、前記搬送する製品の個数に関する個数情報を含む製品リストを取得し、前記製品リストの前記搬送する製品の個数と、前記ゲート部が読み出した識別情報の個数と、前記画像処理部によって判定された前記搬送される製品の個数とを比較し、全てが一致している場合、前記搬送される製品に過不足はないと判定する
請求項1又は2に記載の製品管理システム。 - 前記製品リストは、前記搬送する製品の識別情報を含み、
前記過不足判定部は、前記製品リストの前記搬送する製品の識別情報と、前記ゲート部が読み出した識別情報とが全て一致し、さらに、前記画像処理部によって判定された前記搬送される製品の個数と前記ゲート部が読み出した識別情報の個数とが一致した場合、前記搬送される製品に過不足はないと判定する
請求項4記載の製品管理システム。 - 前記製品リストは、搬送方向に関する情報を含み、
前記過不足判定部は、さらに、前記製品リストの搬送方向と、前記画像処理部によって判定された搬送方向とが一致するとき、前記搬送される製品に過不足はないと判定する
請求項5記載の製品管理システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021035717A JP7669727B2 (ja) | 2021-03-05 | 2021-03-05 | 製品管理システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021035717A JP7669727B2 (ja) | 2021-03-05 | 2021-03-05 | 製品管理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022135731A JP2022135731A (ja) | 2022-09-15 |
| JP7669727B2 true JP7669727B2 (ja) | 2025-04-30 |
Family
ID=83232120
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021035717A Active JP7669727B2 (ja) | 2021-03-05 | 2021-03-05 | 製品管理システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7669727B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025535680A (ja) * | 2022-09-29 | 2025-10-28 | ノマド ゴー,インコーポレイテッド | エッジコンピュータビジョン及びアクティブリアリティのための機械学習システムに関する方法及び装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7580537B1 (ja) | 2023-07-05 | 2024-11-11 | 北海道電力株式会社 | 制御装置、物品管理装置、物品管理システム、物品管理方法及びプログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004352436A (ja) | 2003-05-29 | 2004-12-16 | Hitachi Kokusai Electric Inc | 物品確認システム |
| JP2005100372A (ja) | 2003-09-02 | 2005-04-14 | Fuji Photo Film Co Ltd | 撮像システム、及びプログラム |
| JP2006103812A (ja) | 2004-09-30 | 2006-04-20 | Ricoh Co Ltd | 搬入管理システム、搬入管理方法及び搬入管理用シート状部材 |
| JP2012108777A (ja) | 2010-11-18 | 2012-06-07 | Nec Software Kyushu Ltd | 監視システム、監視装置、監視方法、及びプログラム |
| CN106202333A (zh) | 2016-07-02 | 2016-12-07 | 北京工业大学 | 一种仓储视频处理和快速检索的方法 |
| JP2017001835A (ja) | 2015-06-11 | 2017-01-05 | 株式会社デンソーエスアイ | 無線タグ管理システム |
| JP2018146177A (ja) | 2017-03-06 | 2018-09-20 | 株式会社ロボ・ガレージ | 物品貯蔵庫の在庫管理装置 |
| JP2021031222A (ja) | 2019-08-21 | 2021-03-01 | Necプラットフォームズ株式会社 | 情報処理装置、読取システム、情報処理方法、及びプログラム |
-
2021
- 2021-03-05 JP JP2021035717A patent/JP7669727B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004352436A (ja) | 2003-05-29 | 2004-12-16 | Hitachi Kokusai Electric Inc | 物品確認システム |
| JP2005100372A (ja) | 2003-09-02 | 2005-04-14 | Fuji Photo Film Co Ltd | 撮像システム、及びプログラム |
| JP2006103812A (ja) | 2004-09-30 | 2006-04-20 | Ricoh Co Ltd | 搬入管理システム、搬入管理方法及び搬入管理用シート状部材 |
| JP2012108777A (ja) | 2010-11-18 | 2012-06-07 | Nec Software Kyushu Ltd | 監視システム、監視装置、監視方法、及びプログラム |
| JP2017001835A (ja) | 2015-06-11 | 2017-01-05 | 株式会社デンソーエスアイ | 無線タグ管理システム |
| CN106202333A (zh) | 2016-07-02 | 2016-12-07 | 北京工业大学 | 一种仓储视频处理和快速检索的方法 |
| JP2018146177A (ja) | 2017-03-06 | 2018-09-20 | 株式会社ロボ・ガレージ | 物品貯蔵庫の在庫管理装置 |
| JP2021031222A (ja) | 2019-08-21 | 2021-03-01 | Necプラットフォームズ株式会社 | 情報処理装置、読取システム、情報処理方法、及びプログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025535680A (ja) * | 2022-09-29 | 2025-10-28 | ノマド ゴー,インコーポレイテッド | エッジコンピュータビジョン及びアクティブリアリティのための機械学習システムに関する方法及び装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022135731A (ja) | 2022-09-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11049278B2 (en) | System and method for visual identification, and system and method for classifying and sorting | |
| US20210374659A1 (en) | Real Time Event Tracking and Digitization for Warehouse Inventory Management | |
| US20190087663A1 (en) | Information processing apparatus, information processing method, and information processing system | |
| JP7669727B2 (ja) | 製品管理システム | |
| KR101679381B1 (ko) | 재고 관리 서비스 제공 방법 | |
| CN114819821B (zh) | 货物出库校验方法、装置、计算机设备和存储介质 | |
| WO2005041118A1 (ja) | 無線タグを有する対象物とその処理装置及び方法 | |
| CN117557968B (zh) | 监控方法、装置、存储介质及计算机设备 | |
| US20150066201A1 (en) | Real-time 3-d identification of seemingly identical objects | |
| JP2015042586A (ja) | 物品保管設備 | |
| Naumann et al. | Literature review: Computer vision applications in transportation logistics and warehousing | |
| CN114255435B (zh) | 传送装置异常检测方法、装置、电子设备及存储介质 | |
| US20240127177A1 (en) | Methods and devices for item tracking in closed environments | |
| CN102567755A (zh) | 读取器/写入器控制装置 | |
| EP2588391A1 (en) | Method and arrangement for positioning of an object in a warehouse | |
| KR20120046651A (ko) | 영상 촬영이 가능한 스캐너 및 그를 이용한 출고 제품 확인 방법 | |
| KR20210012783A (ko) | 화상 위·변조 방지 기술을 적용한 국제복합운송에서의 운송화물 상태 확인 시스템 | |
| CN108256803A (zh) | 信息物理系统 | |
| CN112116286A (zh) | 基于rfid的无人感应盘点方法、装置、设备及存储介质 | |
| US12142049B2 (en) | Freight management systems and methods | |
| CN116563989A (zh) | 一种基于rfid采集及机器视觉结合的双校验控制方法及系统 | |
| KR20230174128A (ko) | 객체 인식을 이용한 스마트 재고 관리 시스템 | |
| CN119404213A (zh) | 食品管理方法、程序、食品管理系统、以及食品管理标签 | |
| TWI814100B (zh) | 物流辨識撿貨系統 | |
| CN113673925A (zh) | 物品出库验证方法、装置、设备及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20220210 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20220228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20220228 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20240209 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20240214 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241028 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250318 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250331 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7669727 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |