以下、図面を参照しながら、本開示にかかる車両および障害物検知装置の実施形態について説明する。
(車両の構成例)
本明細書において、車両1の前後左右上下は、それぞれ車両1の運転席を基準とする方向であることとする。
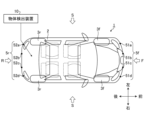
図1A、図1Bに示すように、車両1は、車体2と、所定方向に沿って車体2に結合された2対の車輪3とを備える。これらの車輪3のうち、1対のフロントタイヤ3fは車体2の前側の下面に取り付けられ、1対のリアタイヤ3rは車体2の後側の下面に取り付けられている。
車体2は上面視で略矩形をしており、フロントタイヤ3f側の端部である前端部F、リアタイヤ3r側の端部である後端部R、及びフロントタイヤ3fとリアタイヤ3rとの間の左右方向の車体2の端部である側端部Sを有する。
車体2の前後端部F,Rであって、車体2の下端付近には1対のバンパー4が設けられている。1対のバンパー4のうち、フロントバンパー4fは車体2の下端部付近の前面全体と側面の一部とを覆う。1対のバンパー4のうち、リアバンパー4rは車体2の下端部付近の後面全体と側面の一部とを覆う。
車体2には、音波(例えば、超音波)の送受波を行う送受波装置5が取り付けられている。送受波装置5は、車両1の周囲に音波を送波し、送波音波が反射された反射波を受波する。
送受波装置5のうち、フロントバンパー4fには送受波装置5fが取り付けられ、リアバンパー4rには送受波装置5rが配置される。送受波装置5が、車体2の両側端部Sにそれぞれ取り付けられていてもよい。また、送受波装置5が、車体2の4つの角に取り付けられていてもよい。
送受波装置5fは、例えば複数の送受波センサ51を備える。図1A、図1Bの例では、送受波装置5fは4個の送受波センサ51a~51dを備えている。ただし、送受波装置5fに含まれる送受波センサ51の数は4個に限らず任意である。複数の送受波センサ51a~51dは、例えば左から右へと並んでフロントバンパー4fに等間隔で取り付けられてもよい。
各々の送受波センサ51a~51dは、例えば、所定の間隔で音波を送波し、送波のタイミングとは異なるタイミングの所定の間隔で反射波を受波するソナーである。なお、各々の送受波センサ51a~51dは、例えば送波タイミングと受波タイミングとが交互に入れ替わるように構成されてもよい。
送受波装置5rは、例えば複数の送受波センサ52を備える。図1A、図1Bの例では、送受波装置5rは4個の送受波センサ52a~52dを備えている。ただし、送受波装置5rに含まれる送受波センサ52の数は4個に限らず任意である。複数の送受波センサ52a~52dは、例えば左から右へと並んでリアバンパー4rに等間隔で配置されてもよい。
各々の送受波センサ52a~52dは、例えば、所定の間隔で音波を送波し、送波のタイミングとは異なるタイミングの所定の間隔で反射波を受波するソナーである。なお、各々の送受波センサ52a~52dは、例えば送波タイミングと受波タイミングとが交互に入れ替わるように構成されてもよい。
上記のように構成される送受波装置5からの送受波に関する情報は、物体検出装置10に送信される。物体検出装置10は例えば車両1に搭載されており、送受波装置5からの情報に基づいて車両1の周囲の物体(例えば、障害物)を検出する。ただし、物体検出装置10は、車両1に搭載されていなくともよく、遠隔地から車両1の状況を把握して物体を検出してもよい。
なお、実施形態の物体検出装置10は、車両1が低速で走行している際に稼働され、例えば、駐車スペースへの駐車および駐車スペースからの出庫の際に、車両1の周囲の物体を検出して車両1の運転支援を行う。具体的には、物体検出装置10は、車両1が低速、例えば20km/h以下の速度であって、好ましくは15km/h以下、より好ましくは10km/h以下の速度で走行中に稼働するものとすることができる。
車両1は、所定方向に沿って配置された2対の車輪3を用いて走行することが可能である。この場合、2対の車輪3が配置される所定方向が車両1の走行方向(移動方向)となり、例えば、車両1は、ギアの切り替えにより前進または後退することができる。また、車両1は、操舵により右左折することもできる。
(物体検出装置の構成例)
図2に示すように、車両1は物体検出システム100と運転支援システム200とを備える。
物体検出システム100は、例えば送受波装置5f,5r及び物体検出装置10を備え、車両1の近傍の物体(例えば、障害物)を検出する。運転支援システム200は、例えば物体検出装置10及び車両制御装置20を備え、運転者による車両1の運転を支援する。
物体検出装置10は、例えばCPU(Central Processing Unit)11、RAM(Random Access Memory)12、及びROM(Read Only Memory)13を備えたECU(Electronic Cotrol Unit)のコンピュータとして構成されている。
また、物体検出装置10は、車両制御装置20の各部および送受波装置5f,5rの個々の送受波センサ51,52と、各種情報の送受信が可能なI/O(Input/Output)ポート15を備えている。物体検出装置10が、例えば、HDD(Hard Disk Drive)またはSSD(Solid State Drive)の記憶装置14を備えていてもよい。
物体検出装置10のRAM12、ROM13、記憶装置14、及びI/Oポート15の各構成は、例えば内部バスを介してCPU11と各種情報の送受信が可能に構成されている。
物体検出装置10は、例えばROM13にインストールされているプログラムをCPU11が実行することにより、送受波装置5f,5rにおける送波音波および反射波に基づいて、車両1の近傍に物体(例えば、障害物)がある場合にはそれを検出する。また、物体検出装置10は、障害物の検出結果に基づいて、車両1へのフィードバックを行うよう指示する信号を車両制御装置20へと出力する。
車両制御装置20は、例えば車速センサ21、アクセルセンサ22、ブレーキセンサ23、ブレーキアクチュエータ24、及びエンジンコントローラ25を備える。
車速センサ21は車輪3の回転量から車両1の速度を検知する。アクセルセンサ22は、運転者によるアクセルペダルの操作量を検知する。ブレーキセンサ23は、運転者によるブレーキペダルの操作量を検知する。
ブレーキアクチュエータ24は、通常走行時はブレーキセンサ23の検知結果に基づいてフロントタイヤ3f及びリアタイヤ3rの少なくともいずれかに制動をかける。エンジンコントローラ25は、通常走行時はアクセルセンサ22の検知結果に基づいてエンジンの出力制御を行って、車両1の加減速制御を実行する。
車両制御装置20は、例えば、車速センサ21、アクセルセンサ22、及びブレーキセンサ23から車両1の各部の状態を示す情報を取得する。車両制御装置20は、これらの情報および物体検出装置10から受信した信号に基づいて、ブレーキアクチュエータ24及びエンジンコントローラ25の少なくともいずれかを制御することで、例えば物体検出装置10が検出した障害物を回避するよう車両1を制御する。
例えば、車両制御装置20は、ブレーキアクチュエータ24を制御して車両1に制動をかけることで、車両1と障害物との衝突回避を図る。これに替えて、または加えて、車両制御装置20は、エンジンコントローラ25により、エンジンの出力を例えば数秒間抑制させて車両1の加速を抑制することで、車両1と障害物との衝突回避を図ってもよい。
また、車両1は、アクセルペダルが電子制御されるタイプであり、車両制御装置20によってアクセルペダルの開度を制御する機構を備える場合もあり得る。このような場合には、上記のエンジン出力の抑制に替えて、または加えて、車両制御装置20は、アクセルペダル制御機構によって、アクセルペダルの開度を制御して車両1の加速を抑制することで、車両1と障害物との衝突回避を図ってもよい。
このように、車両制御装置20が、車両1に制動をかける機能および車両1の加速を抑制する機能の少なくともいずれかを有することで、運転支援システム200が、例えば、ペダル踏み間違い時に、加速抑制装置、衝突被害軽減ブレーキ装置として機能するように構成されていてもよい。
ペダル踏み間違い時の加速抑制装置および衝突被害軽減ブレーキ装置は、例えば運転者が誤ってアクセルペダルを強く踏み込み過ぎてしまったような場合に、近傍の障害物への衝突を回避するよう運転者への運転支援を行う機能である。
図3に示すように、物体検出装置10は、例えば取得部111、演算部112、判定部113、制御部114、及び記憶部115を備えている。
これらの取得部111、演算部112、判定部113、制御部114、及び記憶部115は、それぞれ取得回路、演算回路、判定回路、制御回路、及び記憶回路として構成されていてもよい。あるいは、これらの構成の少なくともいずれかが、例えば、デバイス、ユニット、またはモジュールとして構成されていてもよい。
取得部111は、個々の送受波センサ51,52から送受波に関する情報を取得する。送受波センサ51,52からの情報には、例えば、個々の送受波センサ51,52が音波を送波した時刻、反射波を受波した時刻、及び反射波の強度の各種情報が含まれている。
また、取得部111は、車両制御装置20の車速センサ21から所定時刻における車両1の速度に関する情報を取得する。取得部111は、車速センサ21からの速度に関する情報に加えて、例えば、車輪3の回転量、または車両制御装置20のアクセルセンサ22、ブレーキセンサ23、ブレーキアクチュエータ24、及びエンジンコントローラ25といった他の構成からの情報を取得してもよい。
演算部112は、例えば、個々の送受波センサ51,52からの情報、及び車速センサ21からの情報に基づいて、車両1の周囲に物体がある場合に、その物体の車両1に対する座標を演算により求める。
判定部113は、演算部112が算出した物体の座標の真偽を判定する。例えば、演算部112が算出した座標には、誤検出によるものが含まれている場合があり、判定部113は、演算部112が算出した座標が真値であるか、あるいは誤検出によるものであるかを判定してよい。
制御部114は、判定部113による判定結果を参照し、演算部112が算出した物体の座標に基づいて、車両1に障害物を回避させる指示内容を含む信号を車両制御装置20に出力する。
具体的には、制御部114は、判定部113による判定結果が真であった場合には、演算部112が算出した物体の座標に基づいて上記信号を出力するか否かを決定する。また、制御部114は、判定部113による判定結果が偽であった場合には、演算部112が算出した物体の座標に基づくことなく上記信号を出力するか否かを決定する。
なお、制御部114は、例えば、車両1の周囲の物体の有無、及びその物体の座標から、その物体が車両1の進行を妨げる障害物となり得る場合には、車両1に障害物を回避させる信号の出力を決定してよい。また、制御部114は、車両1の周囲に物体が存在しない場合、または車両1の周囲の物体が障害物となり得ない場合には、上記信号を出力しない決定を行ってよい。
制御部114は、上記信号を出力する決定をした場合には、車両1に制動をかけさせる信号、及び車両1の加速を抑制させる信号の少なくともいずれかを車両制御装置20に出力する。
記憶部115には、例えば、物体検出装置10を機能させる制御プログラム及び制御パラメータが格納されている。また、記憶部115は、例えば、取得部111が取得した送受波センサ51,52の送受波に関する情報および車両1の速度に関する情報、並びに演算部112が算出した物体の座標を所定期間、保持する。
(物体検出装置の機能例)
次に、図4A~図8Bを用いて、物体検出装置10のより詳細な機能例について説明する。
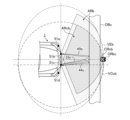
上述のように、個々の送受波センサ51,52は所定のタイミングで送波と受波とを繰り返している。このとき、個々の送受波センサ51,52は、正面への送波方向を中心軸として、所定角度の範囲内へ放射状に音波を送波している。このため、地面による影響を考慮しない場合、個々の送受波センサ51,52は、前方へと円錐状に広がる音波の送受波領域を有している。
ここで一例として、送受波センサ51bが音波を送波し、送波した音波に基づく反射波を受波した場合について説明する。
図4Aに示すように、送受波センサ51bが音波を送波し、その音波が何らかの物体によって反射されて、その反射波を受波したとする。この場合、例えば、音波の送波時刻および反射波の受波時刻、並びに音波の飛翔速度(音速)に基づいて、送受波センサ51からその物体までの音波の往復の飛翔距離を求めることが可能である。
これにより、送受波センサ51b前方の円錐状の送受波領域ARb内であって。送受波センサ51bから等距離に位置する曲面CSb上の無数の点が、その物体の位置を示す候補座標CCa・・・CCe・・・CCj・・・として想定される。
図4Bに示すように、物体検出装置10は、図4Aの候補座標CCa・・・CCe・・・CCj・・・のうち、送受波センサ51bに対して水平方向に位置する候補座標CCa,CCb,CCc,CCe・・・を演算対象とする。なお、物体検出装置10では、検出対象の物体が、送受波センサ51bに対して水平方向にあるものと仮定して演算が行われてよい。
この場合であっても、送受波センサ51bに対して水平方向に位置する候補座標CCa,CCb,CCc,CCe・・・は無数に存在する。このため、物体検出装置10は、送受波センサ51b近傍の送受波センサ51cといった、他の送受波センサ51の同様の送受波情報と、送受波センサ51bにおける時系列の送受波情報とを組み合わせて物体の座標を特定する。
図5A、図5Bでは一例として、送受波センサ51b,51cからの情報に基づいて物体OBを検出する場合について説明する。
上述のように、物体検出装置10は、例えば送受波センサ51b,51cからの送受波情報、及び送受波センサ51bにおける時系列の送受波情報から物体OBの座標を算出する。まずは、図5Aを用いて、送受波センサ51b,51cからの送受波情報に基づいて物体OBの座標を算出する場合について説明する。
図5Aに示すように、送受波センサ51bが、時刻t13に送受波領域ARbbに音波33bを送波し、物体OBに音波33bが反射された反射波44bを時刻t13より後の時刻t14に受波したとする。また、送受波センサ51cが、送受波センサ51bからの音波33bが物体OBに反射された反射波45cを時刻t14より後の時刻t15に受波したとする。
図5Aの例では、物体OBは送受波センサ51cの送受波領域ARc内にある。このため、送受波センサ51cは、物体OBからの反射波45cを受波することができる。送受波センサ51cの受波タイミングが、送受波センサ51bの受波タイミングよりも後の時刻t15となっているのは、図5Aの例において、物体OBが、送受波センサ51bに近く、送受波センサ51cから遠い位置にあるためである。
物体検出装置10の演算部112は、送受波センサ51bの送波タイミング及び受波タイミングに基づいて、送受波センサ51bから物体OBまでの距離を算出する。これにより、物体OBは、送受波センサ51bの送受波領域ARbb内であって、送受波センサ51bを中心点とする仮想円VCbb上に存在するとの演算結果が得られる。
また、演算部112は、送受波センサ51bから物体OBまでの距離、送受波センサ51bの送波タイミング、及び送受波センサ51cの受波タイミングに基づいて、送受波センサ51cから物体OBまでの距離を算出する。
なお、演算部112は、送受波センサ51bの送波タイミング及び送受波センサ51cの受波タイミングに基づいて、送受波センサ51bから物体OBを経由して送受波センサ51cへと至る音波の飛翔距離を求めてよい。そして、演算部112は、送受波センサ51b、物体OB、及び送受波センサ51cまでの全体の飛翔距離から、既に算出済みの送受波センサ51bから物体OBを差し引いた値を送受波センサ51cから物体OBまでの距離とする。
送受波センサ51cから物体OBまでの距離のこのような算出方法は、送受波センサ51b,51cがそれぞれ受波した反射波44b,45bが、同一の物体OBから反射されたものであるとの仮定に基づいて行われる。
これにより、物体OBは、送受波センサ51cの送受波領域ARc内であって、送受波センサ51b,51cを焦点とする仮想楕円VEc上に存在するとの演算結果が得られる。
なお、時刻t13から時刻t14までの経過時間、及び時刻t13から時刻t15までの経過時間はごく僅かであり、また、上述のように車両1は例えば20km/h以下の低速で走行している。このため、これらの経過時間内における車両1の移動距離は無視できるほど微小であるものとして、上記説明ではこの間の車両1の移動距離をゼロとしている。
演算部112は、送受波センサ51bから物体OBまでの距離、送受波センサ51cから物体OBまでの距離、及び送受波センサ51b,51c間の距離から、三辺測量法を用いて送受波センサ51b,51cの送受波情報に基づく物体OBの座標CRbcを求める。この場合、物体OBの座標CRbcは仮想円VCbb及び仮想楕円VEcの交点の位置に相当する。
次に、図5Bを用いて、物体検出装置10が、送受波センサ51bの時系列の送受波情報に基づいて物体OBの座標を算出する場合について説明する。
図5Bに示すように、物体検出装置10は、時刻t13から遡る所定時刻における送受波センサ51bの送受波情報を参照する。上述のように、個々の送受波センサ51,52の送受信情報は記憶部115に格納されている。記憶部115に格納された情報において、送受波センサ51bが、時刻t13より前の時刻t11に送受波領域ARbaに音波31bを送波し、物体OBに音波31bが反射された反射波42bを時刻t11より後の時刻t12に受波していたとする。
物体検出装置10の演算部112は、送受波センサ51bの時刻t11,t12における送受波情報に基づいて、時刻t12における送受波センサ51bから物体OBまでの距離を算出する。これにより、時刻t12において、物体OBは、送受波センサ51bの送受波領域ARba内であって、送受波センサ51bを中心点とする仮想円VCba上に存在するとの演算結果が得られる。
なお、時刻t11から時刻t12までの経過時間もまた、ごく僅かであり、上述のように車両1は例えば20km/h以下の低速で走行している。このため、これらの経過時間内における車両1の移動距離は無視できるほど微小であるものとして、上記説明ではこの間の車両1の移動距離をゼロとしている。
また、物体検出装置10の取得部111は、時刻t12から時刻t14の間における車両1の速度情報を車両制御装置20の車速センサ21から取得する。演算部112は、この速度情報に基づいて、時刻t12から時刻t14の間における車両1の移動距離を算出する。なお、時刻t12から時刻t14の間における車速センサ21からの車輪3の回転量から車両1の移動距離を算出してもよい。
また、演算部112は、時刻t12における送受波センサ51bから物体OBまでの距離、上述の時刻t14における送受波センサ51bから物体OBまでの距離、及びこの間の車両1の移動距離から、三辺測量法を用いて送受波センサ51bの時系列の送受波情報に基づく物体OBの座標CRbbを求める。このとき、物体検出装置10では、送受波センサ51bがそれぞれ異なる時刻に受波した反射波42b,44bは、同一の物体OBから反射されたものと仮定する。
この場合、物体OBの座標CRbbは仮想円VCba,VCbbの交点の位置に相当し、2つの候補座標CCa,CCbを含むこととなる。時刻t12から時刻t14の間に、車両1が、送受波センサ51bの送受波領域ARba,ARbbの中心軸と一致する方向に走行していた場合、これらの候補座標CCa,CCbは、送受波領域ARba,ARbbの中心軸を挟んで互いに線対称となる位置に配置される。
物体検出装置10の判定部113は、演算部112が求めた物体OBの座標CRbc,CRbbに基づいて、演算部112によるこれらの座標CRbc,CRbbの演算結果の真偽を判定する。
具体的には、判定部113は、座標CRbc,CRbb間の距離が所定値内であった場合、例えば、これらの座標CRbc,CRbbが所定の範囲内に収まっている場合には演算結果は真であると判定する。また、判定部113は、座標CRbc,CRbbが所定の範囲を超えて離れていた場合には演算結果は偽であると判定する。
このとき、判定部113は、座標CRbbに含まれる2つの候補座標CCa,CCbのうち、よりもう一方の座標CRbcに近い方を用いる。図5Bの例であれば、判定部113は、候補座標CCa,CCbのうちの候補座標CCaと、座標CRbcとを比較する。
候補座標CCaと座標CRbcとは充分に近接しているため、例えば、これらの演算結果は真であると判定される。これにより、許容可能な誤差範囲内で座標CRbc及び候補座標CCaの近辺に物体OBが存在していることが検出される。
物体検出装置10の制御部114は、座標CRbc,CRbbの演算結果が真であると判定されると、座標CRbc及び候補座標CCaの少なくともいずれかに基づいて、車両1に物体OBを回避させる信号を車両制御装置20に出力するか否かを決定する。
図5A、図5Bの例では、物体OBは車両1の進行方向から若干、側方に外れた位置にある。制御部114は、例えば車両1の進行方向から予測される車両1の移動経路から勘案して、安全とされる距離以上に物体OBが離れている場合、物体OBとの衝突の可能性はないものとして、車両1に物体OBを回避させる信号の出力を行わない決定をする。制御部114は、車両1の移動経路に対して安全とされる距離内に物体OBが近接している場合、物体OBとの衝突の可能性があるものとして、車両制御装置20に信号を出力する。
ところで、例えば、複数の物体が所定の配置で車両1の周囲に存在する場合、または物体が車両1の上方に位置している場合、物体検出装置10が誤検出を起こしやすい状況が幾つか存在する。図6A、図6Bに、誤検出が生じやすい状況の一例について説明する。
まずは、図6Aを用いて、送受波センサ51b,51cからの送受波情報に基づいて物体OBa,OBbの座標を算出する場合について説明する。
図6Aに示すように、送受波センサ51bが、時刻t23に送受波領域ARbbに音波33bを送波し、物体OBaに音波33bが反射された反射波45bを時刻t23より後の時刻t25に受波したとする。また、送受波センサ51cが、送受波センサ51bからの音波33bが物体OBbに反射された反射波44cを、時刻t23より後であって、時刻t25より前の時刻t24に受波したとする。
このとき、物体OBaは送受波センサ51cに対し、送受波センサ51cが送受波を行うことができる最大角度に近い方向に位置している。このため、送受波センサ51cは、図5Aとは異なり、物体OBaに向けて送受波センサ51bが送波した音波33bが物体OBaに反射されて発生した反射波を受波することが困難となることがある。
このような場合、送受波センサ51cは、物体OBbに反射された反射波44cを時刻t24に受波しているので、物体検出装置10は、図5Aのように、物体OBによる反射波44b,45cを受波したとして、送受波センサ51bが受波した物体OBaからの反射波45bと、送受波センサ51cが受波した物体OBbからの反射波45cとが、同一の物体から反射されたものであるとの仮定のもと、三辺測量による演算を行う。物体検出装置10のこのような仮定に基づく仮想の物体を仮に物体OBxと呼ぶ。
なお、送受波センサ51cの受波タイミングが、送受波センサ51bの受波タイミングよりも前の時刻t24となっているのは、図6Aにおいて、送受波センサ51bから物体OBaまでの往復距離より、送受波センサ51bから物体OBbを経由して送受波センサ51cへと至る距離の方が短いためである。
物体検出装置10の演算部112は、送受波センサ51bの送波タイミング及び受波タイミングに基づいて、送受波センサ51bから物体OBxまでの距離を算出する。これにより、実際には送受波センサ51bから物体OBaまでの距離が算出され、仮想の物体OBxは、送受波センサ51bの送受波領域ARbb内であって、送受波センサ51bを中心点とする仮想円VCbb上に存在するとの演算結果が得られる。
また、演算部112は、反射波45b,44cが同一の物体OBxからの反射であるとの仮定のもと、送受波センサ51bから物体OBxまでの距離、送受波センサ51bの送波タイミング、及び送受波センサ51cの受波タイミングに基づいて、送受波センサ51cから物体OBxまでの距離を算出する。
これにより、実際には送受波センサ51cから物体OBbまでの距離が算出され、仮想の物体OBxは、送受波センサ51cの送受波領域ARc内であって、送受波センサ51b,51cを焦点とする仮想楕円VEc上に存在するとの演算結果が得られる。
なお、時刻t23から時刻t24までの経過時間、及び時刻t23から時刻t25までの経過時間における車両1の移動距離は無視できるほど微小であるものとして、上記説明ではこの間の車両1の移動距離をゼロとしている。
演算部112は、送受波センサ51bから物体OBxまでの距離、送受波センサ51cから物体OBxまでの距離、及び送受波センサ51b,51c間の距離から、三辺測量法を用いて送受波センサ51b,51cの送受波情報に基づく物体OBxの座標CRbcを求める。この場合にも、物体OBxの座標CRbcは仮想円VCbb及び仮想楕円VEcの交点の位置に相当することとなる。なお、図6Aの仮想楕円VEcは、物体OBbに基づくため、図5Aの仮想楕円VEcとは異なり、図6Aにおける仮想円VCbbとの交点は、図5Aと異なる位置となる。
このため、実際には複数存在する物体OBa,OBbからの反射波45b,44cを同一の物体OBxからの反射波として演算処理を行っているため、物体OBa,OBbのいずれからも外れた座標CRbcが算出されてしまう。
そこで、実施形態の物体検出装置10では、上記に加え、送受波センサ51bの時系列の送受波情報に基づいて物体OBxの座標を算出する。この点について図6Bを用いて説明する。
図6Bに示すように、送受波センサ51bが、時刻t23から遡る時刻t21において、送受波領域ARbaに音波31bを送波し、物体OBaに音波31bが反射された反射波42bを時刻t21より後の時刻t22に受波していたとする。
物体検出装置10の演算部112は、送受波センサ51bにおけるこれらの送受波情報を記憶部115から取得する。また、演算部112は、送受波センサ51bの時刻t21,t22における送受波情報に基づいて、時刻t22における送受波センサ51bから物体OBxまでの距離を算出する。
これにより、実際には時刻t22における送受波センサ51bから物体OBaまでの距離が算出され、仮想の物体OBxは、送受波センサ51bの送受波領域ARba内であって、送受波センサ51bを中心点とする仮想円VCba上に存在するとの演算結果が得られる。
なお、時刻t21から時刻t22までの経過時間における車両1の移動距離は無視できるほど微小であるものとして、上記説明ではこの間の車両1の移動距離をゼロとしている。
また、演算部112は、取得部111が車両制御装置20の車速センサ21から取得した時刻t22から時刻t25の間における車両1の速度情報に基づいて、時刻t22から時刻t25の間における車両1の移動距離を算出する。
また、演算部112は、送受波センサ51bがそれぞれ異なる時刻に受波した反射波42b,44bが同一の物体OBxから反射されたものとの仮定のもと、時刻t22における送受波センサ51bから物体OBxまでの距離、時刻t25における送受波センサ51bから物体OBxまでの距離、及びこの間の車両1の移動距離から、三辺測量法を用いて送受波センサ51bの時系列の送受波情報に基づく物体OBxの座標CRbbを求める。
この場合、物体OBxの座標CRbbは仮想円VCba,VCbbの交点の位置に相当し、例えば送受波センサ51bの送受波領域ARba,ARbbの中心軸に対して線対称に配置される2つの候補座標CCa,CCbを含む。
このとき、実際には物体OBaの座標が算出されるため、候補座標CCa,CCbのうちの一方は、許容可能な誤差範囲内で物体OBaの位置を示すこととなる。図6Bの例では、物体OBaに充分近接した候補座標CCaが得られている。
物体検出装置10の判定部113は、候補座標CCa,CCbのうち、より座標CRbcに近い候補座標CCbと、座標CRbcとを比較し、これらの候補座標CCb及び座標CRbcが所定範囲内に収まっているか否かに応じて、座標CRbb,CRbcの演算結果の真偽を判定する。
図6Bの例では、候補座標CCbと座標CRbcとの距離は離れており、判定部113は、例えば座標CRbb,CRbcの演算結果は偽であると判定する。
物体検出装置10の制御部114は、座標CRbb,CRbcの演算結果が偽であると判定されると、いずれの座標CRbb,CRbcにも基づくことなく、車両1に回避制御を行わせる信号を車両制御装置20に出力するか否かを決定する。なお、この時点において、他の物体が検出されていない場合、車両1の回避制御は不要であるので、制御部114は信号の出力を行わない決定をしてもよい。
なお、物体検出装置10による物体検出動作は、車両1が低速走行をしている間、短いスパンで繰り返し行われている。よって、送受波センサ51b,51cと物体OBa,OBbとの相対位置の変化によって、他の時刻においては物体OBa,OBbの座標が正しく検出されうる。
制御部114は、図6A、図6Bに示す所定の時刻に限って物体検出装置10の検出結果を採用しないのであって、物体OBa,OBbの座標が正しく検出された時刻においては、これらの座標に基づいて車両1に回避制御を行わせる信号を出力するか否かを決定する。これにより、物体OBa,OBbとの衝突のリスクを回避し、車両1の制御が適切に行われる。
なお、図6A、図6Bの例においては、反射波41b,44c,45bのうち、送受波センサ51cが受波した反射波44cが、他の反射波41b,45bとは異なる物体OBbから反射された場合について説明した。しかし、反射波41b,44c,45bのうち、いずれが異なる物体からの反射波であっても、上記と同様、演算部112による演算結果は偽であると判定され得る。
例えば、反射波41b,44cがいずれも同一の物体から反射され、反射波45bが異なる物体から反射された場合でも、これらの反射波41b,44c,45bから求められる複数の座標の少なくともいずれかが所定範囲から外れることとなり、上記演算結果が偽であると判定することができる。
また、例えば反射波44c,45bがいずれも同一の物体から反射され、反射波41bが異なる物体から反射された場合でも、これらの反射波41b,44c,45bから求められる複数の座標の少なくともいずれかが所定範囲から外れることとなり、上記演算結果が偽であると判定することができる。
次に、誤検出が生じやすい状況の他の例として、物体が車両1の上方に位置している場合について図7A、図7B、図8A及び図8Bを用いて説明する。
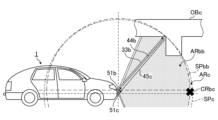
図7A、図7B、図8A及び図8Bに示す例では、物体OBcは、車両1の進行方向上方に位置し、天井から下方に突出する梁を有している。
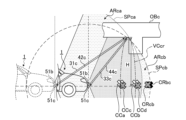
まずは、図7A、図7Bを用いて、送受波センサ51b,51cからの送受波情報に基づいて物体OBcの座標を算出する場合について説明する。なお、図7Aの車両1の側面図には、説明の便宜上、水平方向に並ぶ送受波センサ51b,51cの両方を示している。
図7A、図7Bに示すように、送受波センサ51bが、時刻t33に送受波領域ARbbに音波33bを送波し、物体OBcに音波33bが反射された反射波44bを時刻t33より後の時刻t34に受波したとする。また、送受波センサ51cが、送受波センサ51bからの音波33bが物体OBcに反射された反射波45cを時刻t34より後の時刻t35に受波したとする。
送受波センサ51cの受波タイミングが、送受波センサ51bの受波タイミングよりも後の時刻t35となっているのは、送受波センサ51bの送受波が、物体OBcにおいて送受波センサ51bに最も近い部位を反射点として行われるのに対し、送受波センサ51cからは、この反射点が送受波センサ51b寄り、例えば、車両1の正面方向に対して左寄りにずれた遠い位置にあるためである。
なお、図7Aに示すように、送受波センサ51b,51cは、物体OBcからの反射波のうち、天井と梁とのL字状の角部を反射点とするものを受波しやすい。L字状の角部による集音効果で反射波の強度が高まるからである。
物体検出装置10は、このように物体OBcが実際には車両1の進行方向上方にある場合であっても、送受波センサ51b,51cに対して水平方向に位置する物体によって上記の反射波44b,45cが反射されたものであるとの仮定のもと、演算を行う。ここでも、このような仮想の物体を物体OBxと呼ぶこととする。
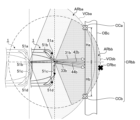
物体検出装置10の演算部112は、送受波センサ51bの送波タイミング及び受波タイミングに基づいて、送受波センサ51bから物体OBxまでの距離を算出する。これにより、仮想の物体OBxは、図7Bに示すように、送受波センサ51bの送受波領域ARbb内であって、送受波センサ51bを中心点として送受波センサ51bの水平方向に広がる仮想円VCbb上に存在するとの演算結果が得られる。
なお、図7Aには、仮想円VCbbと半径が等しく、送受波センサ51bを中心点として3次元に広がる仮想球体SPbbを示す。
また、演算部112は、送受波センサ51bから物体OBxまでの距離、送受波センサ51bの送波タイミング、及び送受波センサ51cの受波タイミングに基づいて、送受波センサ51cから物体OBxまでの距離を算出する。これにより、仮想の物体OBxは、図7Bに示すように、送受波センサ51cの送受波領域ARc内であって、送受波センサ51b,51cを焦点として送受波センサ51b,51cの水平方向に広がる仮想楕円VEc上に存在するとの演算結果が得られる。
なお、図7Aには、送受波センサ51cから物体OBcの実際の反射点までの距離と等しい半径を有し、送受波センサ51cを中心点として3次元に広がる仮想球体SPcを示す。
また、上記説明では、時刻t33から時刻t34までの経過時間、及び時刻t33から時刻t35までの経過時間における車両1の移動距離は無視できるほど微小であるものとして、この間の車両1の移動距離をゼロとしている。
演算部112は、送受波センサ51bから物体OBxまでの距離、送受波センサ51cから物体OBxまでの距離、及び送受波センサ51b,51c間の距離から、三辺測量法を用いて送受波センサ51b,51cの送受波情報に基づく物体OBxの座標CRbcを求める。この場合にも、物体OBxの座標CRbcは仮想円VCbb及び仮想楕円VEcの交点の位置に相当することとなる。
ただし、実際には送受波センサ51b,51cの前方上方に存在する物体OBcからの反射波45b,44cを仮想の物体OBxからの反射波として演算処理を行っているため、座標CRbcは、送受波センサ51b,51cの水平方向前方であって、送受波センサ51b,51cの中央付近にあるものとして算出される。
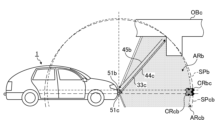
次に、物体検出装置10は、送受波センサ51bの時系列の送受波情報に基づいて物体OBxの座標を算出する。この場合について図8を用いて説明する。なお、図8Aの車両1の側面図においても、説明の便宜上、水平方向に並ぶ送受波センサ51b,51cの両方を示している。
図8A、図8Bに示すように、送受波センサ51bが、時刻t33から遡る時刻t31において、送受波領域ARbaに音波31bを送波し、物体OBcに音波31bが反射された反射波42bを時刻t31より後の時刻t32に受波していたとする。
物体検出装置10の演算部112は、送受波センサ51bにおけるこれらの送受波情報を記憶部115から取得する。また、演算部112は、送受波センサ51bの時刻t31,t32における送受波情報に基づいて、時刻t32における送受波センサ51bから物体OBxまでの距離を算出する。
これにより、仮想の物体OBxは、図8Bに示すように、送受波センサ51bの送受波領域ARba内であって、送受波センサ51bを中心点として送受波センサ51bの水平方向に広がる仮想円VCba上に存在するとの演算結果が得られる。
なお、図8Aには、図7Aに示した仮想球体SPbbと共に、仮想円VCbaと半径が等しく、送受波センサ51bを中心点として3次元に広がる仮想球体SPbaを示す。
また、上記説明では、時刻t31から時刻t32までの経過時間における車両1の移動距離は無視できるほど微小であるものとして、この間の車両1の移動距離をゼロとしている。
また、演算部112は、取得部111が車両制御装置20の車速センサ21から取得した時刻t32から時刻t34の間における車両1の速度情報に基づいて、時刻t32から時刻t34の間における車両1の移動距離を算出する。
また、演算部112は、時刻t32における送受波センサ51bから物体OBxまでの距離、時刻t34における送受波センサ51bから物体OBxまでの距離、及びこの間の車両1の移動距離から、三辺測量法を用いて送受波センサ51bの時系列の送受波情報に基づく物体OBxの座標CRbbを求める。
この場合、物体OBxの座標CRbbは仮想円VCba,VCbbの交点の位置に相当し、例えば送受波センサ51bの送受波領域ARba,ARbbの中心軸に対して線対称に配置される2つの候補座標CCa,CCbを含む。
図8Aの車両1の側面図では、送受波領域ARba,ARbbの中心軸を挟んで左右方向に位置する候補座標CCa,CCbを、便宜上、送受波センサ51bの水平方向前方に並べて示している。このように、候補座標CCa,CCbは、仮想球体SPba,SPbbの表面同士の交点により形成される仮想円VCcr上であって、送受波センサ51bと同じ高さ位置の2点に配置される。
なお、時刻t32から時刻t34の間において、車両1が一貫して、送受波センサ51bの送受波領域ARba,ARbbの中心軸に対して平行に移動していた場合、送受波センサ51bの送受波領域ARba,ARbbの中心軸から候補座標CCaまでの距離Ha、及び候補座標CCbまでの距離Hbは、送受波センサ51bから物体OBcの反射点までの高さ方向の距離Hと略一致することとなる。
物体検出装置10の判定部113は、候補座標CCa,CCbのうち、より座標CRbcに近い候補座標CCbと、座標CRbcとを比較し、これらの候補座標CCb及び座標CRbcが所定範囲内に収まっているか否かに応じて、座標CRbb,CRbcの演算結果の真偽を判定する。
図8Bの例では、候補座標CCbと座標CRbcとの距離は大きく離れており、判定部113は、例えば座標CRbb,CRbcの演算結果は偽であると判定する。
物体検出装置10の制御部114は、座標CRbb,CRbcの演算結果が偽であると判定されると、いずれの座標CRbb,CRbcにも基づくことなく、車両1に回避制御を行わせる信号を車両制御装置20に出力するか否かを決定する。
以上、幾つかの状況において、物体検出装置10が物体検出の真偽判定を行う場合の例について説明したが、物体検出装置10による物体検出の真偽判定が可能な状況は上記以外にも種々想定される。例えば、車両1の進行方向下方に縁石がある場合のように、車両1の走行の妨げとならない程度に充分に低い段差が存在する場合などにも物体検出装置10による物体検出の真偽判定が可能である。
(物体検出システムによる物体検出方法)
次に、図9を用いて、実施形態の物体検出システム100による物体検出方法の例について説明する。
なお、図9において、送受波センサ(b)は送受波センサ51bを意味し、送受波センサ(c)は送受波センサ51cを意味する。ただし、物体検出システム100において、物体の検出に用いられる送受波センサの組み合わせはこれに限られない。
物体検出システム100では、車両1の前端部に取り付けられた送受波センサ51a~51dのうち、いずれかを組み合わせて物体検出を行うことができ、より好ましくは、互いに隣りに配置された送受波センサ51a,51b同士、送受波センサ51b,51c同士、または送受波センサ51c,51d同士を組み合わせて用いることができる。
また、物体検出システム100では、車両1の後端部に取り付けられた送受波センサ52a~52dのうち、いずれかを組み合わせて物体検出を行うことができ、より好ましくは、互いに隣りに配置された送受波センサ52a,52b同士、送受波センサ52b,52c同士、または送受波センサ52c,52d同士を組み合わせて用いることができる。
また、図9において、座標(bb)は、同一の送受波センサにおける時系列の送受波情報に基づいて算出された座標を意味し、例えば上述の図5A~図8Bの座標CRbbに相当する。また、座標(bc)は、複数の送受波センサの送受波情報に基づいて算出された座標を意味し、例えば上述の図5A~図8Bの座標CRbcに相当する。
図9に示すように、例えば時刻t1に送受波センサ51bが音波を送波する(ステップS101)。また、時刻t1の後の時刻t2に、送受波センサ51bが、自身に由来する反射波、例えば、時刻t1に送波された音波の反射波を受波する(ステップS102)。
取得部111は、送受波センサ51bの時刻t1,t2における送受波情報を取得し、記憶部115に格納する(ステップS103)。
また、例えば時刻t3に送受波センサ51bが音波を送波する(ステップS104)。また、時刻t3の後の時刻t4に、送受波センサ51bが、自身に由来する反射波、例えば、時刻t3に送波された音波の反射波を受波する(ステップS105)。更に、時刻t4の後の時刻t5に、送受波センサ51cが、送受波センサ51bが時刻t3に送波した音波の反射波を受波する(ステップS106)。
ただし、送受波センサ51b,51cと、音波の反射点となった物体との位置関係によっては、送受波センサ51bによる受波が、送受波センサ51cによる受波の後になることもある。
取得部111は、送受波センサ51b,51cの時刻t3~t5における送受波情報、及び車両1の時刻t2~t4における速度情報を取得する(ステップS107)。
演算部112は、異なる送受波センサ51b,51cのそれぞれの送受波情報に基づいて、三辺測量法により物体の座標CRbcを算出する(ステップS108)。
例えば、演算部112は、送受波センサ51bが時刻3に送波した音波の情報、送受波センサ51bが時刻t4に受波した反射波の情報、送受波センサ51cが時刻t5に受波した反射波の情報、及び送受波センサ51b,51c間の距離に基づいて、物体の座標CRbcを求めてもよい。
また、演算部112は、送受波センサ51bにおける時系列の送受波情報、及びこの間の車両1の速度情報に基づいて、三辺測量法により物体の座標CRbbを算出する(ステップS109)。
例えば、演算部112は、記憶部115に格納された送受波情報を参照し、送受波センサ51bが時刻1に送波した音波の情報、送受波センサ51bが時刻t2に受波した反射波の情報、送受波センサ51bが時刻3に送波した音波の情報、送受波センサ51bが時刻t4に受波した反射波の情報、及び時刻t2~t4における車両1の速度情報に基づいて、物体の座標CRbbを求める。
なお、ステップS108の処理とステップS109の処理とは処理順を入れ替え可能である。例えば、図9の例によらず、ステップS109の処理を先に行い、ステップS108の処理をその後に行ってもよい。
より詳細には、時刻t4における送受波センサ51bと物体との距離を、時刻t5における送受波センサ51cと物体との距離よりも先に算出しさえすれば、時刻t2における送受波センサ51bと物体との距離は、どのタイミングで算出してもよい。また、時刻t2~t4における車両1の移動距離も、送受波センサ51b,51cと物体との距離の少なくともいずれかより先に算出しておいてもよいし、送受波センサ51b,51cと物体との距離を全て算出した後に算出してもよい。
判定部113は、送受波センサ51b,51cの送受波情報に基づく座標CRbcと、送受波センサ51bの時系列の送受波情報に基づく座標CRbbとの間の距離が所定値内であるか否かを判定する(ステップS110)。
座標CRbc,CRbb間の距離が所定値内であった場合(ステップS110:Yes)、判定部113は座標CRbc,CRbbの演算結果は真であると判定する(ステップS111)。
この場合、制御部114は、座標CRbc,CRbbの少なくともいずれかを車両制御情報として取り扱う(ステップS112)。例えば、制御部114は、座標CRbc,CRbbの少なくともいずれかに基づいて、車両1の制御を指示する信号を出力するか否かを決定してもよい。
座標CRbc,CRbb間の距離が所定値を超えていた場合(ステップS110:No)、判定部113は座標CRbc,CRbbの演算結果は偽であると判定する(ステップS113)。
この場合、制御部114は、座標CRbc,CRbbのいずれも車両制御情報として取り扱わない(ステップS114)。例えば、制御部114は、座標CRbc,CRbbのいずれにも基づくことなく、車両1の制御を指示する信号を出力するか否かを決定してもよい。
このように、制御部114から車両制御装置20へと信号が出力されることにより、または出力されないことにより、車両1が適正に制御される(ステップS115)。
以上により、実施形態の物体検出システム100による物体検出方法が終了する。
(概括)
超音波といった音波を用いた物体検出装置においては、複数の送受波センサからの送受波情報に基づいて車両の周囲の物体を検出し、また、物体の座標を特定する。具体的には、1つの送受波センサから送波された音波に基づく反射波を、その送受波センサ自身が受波したこと、及びその送受波センサとは異なる送受波センサが受波したことに基づいて物体の座標を算出する。
しかしながら、このような手法では、これらの送受波センサが、例えば、それぞれ異なる物体からの反射波を受波していた場合、または、車両の上方に物体が位置していた場合に誤検出をしてしまう恐れがある。
例えば、物体検出装置が、仮に上述の図6Aにおいて算出された座標CRbcのみに基づいて動作を行った場合、車両1と衝突の可能性がある位置に物体が存在すると誤検出する恐れがある。この場合、例えば物体OBa,OBc間に車両1が通り抜けるのに充分な間隔があった場合でも、不必要に車両1に制動をかけたり、車両1の加速を抑制したりしてしまうこととなる。
また例えば、物体検出装置が、仮に上述の図7A、図7Bにおいて算出された座標CRbcのみに基づいて動作を行った場合、車両1の正面に物体が存在すると誤検出する恐れがある。この場合、例えば物体OBcが車両1の車高を超える高さ位置にあった場合でも、不必要に車両1に制動をかけたり、車両1の加速を抑制したりしてしまうこととなる。
また、上述の特許文献1では、受波された反射波の強度に基づいて段差の判定を行う手法を提示している。しかしながら、反射波の強度には、例えば、反射面の形状および材質、並びに車両の周囲の温湿度によってばらつきが生じることがあり、上記手法では高精度の判定は困難である。
実施形態の物体検出装置10によれば、送受波センサ51bが受波した反射波と、送受波センサ51cが受波した反射波とに基づいて物体の座標CRbcを求め、送受波センサ51bが異なる時刻に受波した複数の反射波に基づいて物体の座標CRbc,CRbbを求める。
これにより、座標CRbc,CRbb間の距離を比較することで、座標CRbc,CRbbの演算結果の真偽を判定することができ、車両1に対する物体の座標算出精度を高めることができる。
実施形態の物体検出装置10によれば、制御部114は、演算結果の真偽についての判定部113の判定結果が偽であった場合、その演算結果に基づくことなく車両1に制動をかけさせ、または車両1の加速を抑制させる信号を出力するか否かを決定する。これにより、不必要に車両1に制動をかけさせ、または車両1の加速を抑制させることを避けることができる。
(変形例)
次に、図10A、図10B、図11A及び図11Bを用いて、実施形態の変形例の物体検出装置について説明する。変形例の物体検出装置においては、複数の送受波センサにおける時系列の送受波情報に基づき、演算結果の真偽判定を行う点が、上述の実施形態の物体検出装置10とは異なる。
変形例の物体検出装置において、図10A、図10B、図11A及び図11Bにおける物体OBcの検出は、上述の実施形態の図7A、図7B、図8A及び図8Bの物体OBcの検出に加えて実施される。そこで、図10A、図10Bにおいては、図7A、図7Bにおいて算出された座標CRbcを予め示しておく。また、図11A、図11Bにおいては、図7A、図7Bにおいて算出された座標CRbcに加え、図8A、図8Bにおいて算出された座標CRbbを予め示しておく。なお、図7A、図7B及び図8A、図8Bの動作と図10A、図10B、図11A及び図11Bの動作とは、いずれが先に実施されてもよい。
まずは、図10A、図10Bを用いて、送受波センサ51b,51cからの送受波情報に基づいて物体OBcの座標を算出する場合について説明する。
図10A、図10Bに示すように、送受波センサ51cが、時刻t43に送受波領域ARcbに音波33cを送波し、物体OBcに音波33cが反射された反射波44cを時刻t43より後の時刻t44に受波したとする。また、送受波センサ51bが、送受波センサ51cからの音波33cが物体OBcに反射された反射波45bを時刻t44より後の時刻t45に受波したとする。
送受波センサ51bの受波タイミングが、送受波センサ51cの受波タイミングよりも後の時刻t45となっているのは、送受波センサ51cの送受波が、物体OBcにおいて送受波センサ51cに最も近い部位を反射点として行われるのに対し、送受波センサ51bからは、この反射点が送受波センサ51c寄り、例えば、車両1の正面方向に対して、右寄りにずれた遠い位置にあるためである。
変形例の演算部は、送受波センサ51cの送波タイミング及び受波タイミングに基づいて、送受波センサ51cから、送受波センサ51cに対して水平方向にあると仮定した仮想の物体OBxまでの距離を算出する。これにより、仮想の物体OBxは、図10Bに示すように、送受波センサ51cの送受波領域ARcb内であって、送受波センサ51cを中心点として送受波センサ51cの水平方向に広がる仮想円VCcb上に存在するとの演算結果が得られる。
なお、図10Aには、仮想円VCcbと半径が等しく、送受波センサ51cを中心点として3次元に広がる仮想球体SPcbを示す。
変形例の演算部は、同様に、物体OBxが送受波センサ51bに対して水平方向にあるとの仮定のもと、送受波センサ51cから物体OBxまでの距離、送受波センサ51cの送波タイミング、及び送受波センサ51bの受波タイミングに基づいて、送受波センサ51bから物体OBxまでの距離を算出する。これにより、仮想の物体OBxは、図10Bに示すように、送受波センサ51bの送受波領域ARb内であって、送受波センサ51b,51cを焦点として送受波センサ51b,51cの水平方向に広がる仮想楕円VEb上に存在するとの演算結果が得られる。
なお、図10Aには、送受波センサ51bから物体OBcの実際の反射点までの距離と等しい半径を有し、送受波センサ51bを中心点として3次元に広がる仮想球体SPbを示す。
また、上記説明では、時刻t43から時刻t44までの経過時間、及び時刻t43から時刻t45までの経過時間における車両1の移動距離は無視できるほど微小であるものとして、この間の車両1の移動距離をゼロとしている。
変形例の演算部は、送受波センサ51cから物体OBxまでの距離、送受波センサ51bから物体OBxまでの距離、及び送受波センサ51b,51c間の距離から、三辺測量法を用いて送受波センサ51c,51bの送受波情報に基づく物体OBxの座標CRcbを求める。
この場合にも、物体OBxの座標CRcbは仮想円VCcb及び仮想楕円VEbの交点の位置に相当することとなる。座標CRcbは、送受波センサ51b,51cの水平方向前方であって、送受波センサ51b,51cの中央付近にあるものとして、座標CRbcに極めて近い位置に算出される。
次に、図11A、図11Bを用いて、送受波センサ51bの時系列の送受波情報に基づいて物体OBcの座標を算出する場合について説明する。
図11A、図11Bに示すように、送受波センサ51cが、時刻t43から遡る時刻t41において、送受波領域ARcaに音波31cを送波し、物体OBcに音波31cが反射された反射波42cを時刻t41より後の時刻t42に受波していたとする。
変形例の演算部は、送受波センサ51bにおけるこれらの送受波情報を変形例の記憶部から取得する。また、演算部は、物体OBxが送受波センサ51cに対して水平方向にあるとの仮定のもと、送受波センサ51cの時刻t41,t42における送受波情報に基づいて、時刻t42における送受波センサ51cから物体OBxまでの距離を算出する。
これにより、仮想の物体OBxは、図11Bに示すように、送受波センサ51cの送受波領域ARca内であって、送受波センサ51cを中心点として送受波センサ51cの水平方向に広がる仮想円VCca上に存在するとの演算結果が得られる。
なお、図11Aには、図10Aに示した仮想球体SPcbと、仮想円VCcaと半径が等しく、送受波センサ51cを中心点として3次元に広がる仮想球体SPcaを示す。
また、上記説明では、時刻t41から時刻t42までの経過時間における車両1の移動距離は無視できるほど微小であるものとして、この間の車両1の移動距離をゼロとしている。
また、変形例の演算部は、時刻t42から時刻t44の間における車両1の速度情報に基づいて、時刻t42から時刻t44の間における車両1の移動距離を算出する。
また、演算部は、時刻t42における送受波センサ51cから物体OBxまでの距離、時刻t44における送受波センサ51cから物体OBxまでの距離、及びこの間の車両1の移動距離から、三辺測量法を用いて送受波センサ51cの時系列の送受波情報に基づく物体OBxの座標CRccを求める。
この場合、物体OBxの座標CRccは仮想円VCca,VCcbの交点の位置に相当し、例えば送受波センサ51cの送受波領域ARca,ARcbの中心軸に対して線対称に配置される2つの候補座標CCc,CCdを含む。
図11Aの車両1の側面図では、送受波領域ARca,ARcbの中心軸を挟んで左右方向に位置する候補座標CCc,CCdを、便宜上、送受波センサ51cの水平方向前方に並べて示している。このように、候補座標CCc,CCdは、仮想球体SPca,SPcbの表面同士の交点により形成される仮想円VCcr上であって、送受波センサ51cと同じ高さ位置の2点に配置される。
なお、時刻t42から時刻t44の間において、車両1が一貫して、送受波センサ51cの送受波領域ARca,ARcbの中心軸に対して平行に移動していた場合、送受波センサ51cの送受波領域ARca,ARcbの中心軸から候補座標CCcまでの距離Hc、及び候補座標CCdまでの距離Hdは、送受波センサ51cから物体OBcの反射点までの高さ方向の距離Hと略一致することとなる。
また、座標CRccに含まれる候補座標CCc,CCdの位置は、上述の図8A、図8Bで算出された座標CRbcに含まれる候補座標CCa,CCbに対して、それぞれ送受波センサ51b,51c間の距離に応じて車両1の正面方向に対して右寄りにシフトしている。
変形例の判定部は、候補座標CCa,CCbのうち、より座標CRbc,CRcbに近い候補座標CCbと、候補座標CCc,CCdのうち、より座標CRbc,CRcbに近い候補座標CCcと、座標CRbc,CRcbとに基づいて、座標CRbb,CRbc,CRcc,CRcbの演算結果の真偽を判定する。
このとき、変形例の判定部は、候補座標CCb,CCc及び座標CRbc,CRcbのそれぞれの距離のうち、例えば所定値を超える座標の組み合わせが所定数を越えているか否か、例えば、所定の範囲を外れる座標が所定数を越えているか否かによって、座標CRbb,CRbc,CRcc,CRcbの演算結果の真偽判定を行ってよい。
なお、候補座標CCb,CCc及び座標CRbc,CRcbのうち、例えば所定の範囲を外れる座標が少なくとも1つある場合、座標CRbb,CRbc,CRcc,CRcbの演算結果を偽と判定する、とすることができる。このとき、判定に用いる所定範囲は、上述の実施形態において、判定部113が判定に用いる所定範囲と等しくとも異なっていてもよい。
図11A、図11Bの例では、候補座標CCbと候補座標CCcと座標CRbc,CRcbとの距離はいずれも大きく離れており、変形例の判定部は、例えば座標CRbb,CRbc,CRcc,CRcbの演算結果は偽であると判定する。
変形例の制御部は、座標CRbb,CRbc,CRcc,CRcbの演算結果が偽であると判定されると、いずれの座標CRbb,CRbc,CRcc,CRcbにも基づくことなく、車両1に回避制御を行わせる信号を出力するか否かを決定する。
以上、車両1の進行方向上方に物体OBcがある状況において、変形例の物体検出装置が物体検出の真偽判定を行う場合の例について説明したが、上述の実施形態の物体検出装置10と同様、変形例の物体検出装置によれば、例えば、車両1の周囲に複数の物体が存在する場合、または車両1の進行方向下方に充分に低い段差が存在する場合にも物体検出の真偽判定を行うことが可能である。
変形例の物体検出装置によれば、物体の座標CRbc,CRbbに加えて、演算部は更に、送受波センサ51cが受波した反射波と、送受波センサ51bが受波した反射波とに基づいて物体の座標CRcbを求めるとともに、送受波センサ51cが異なる時刻に受波した複数の反射波に基づいて物体の座標CRccを求める。
これにより、座標CRbb,CRbc,CRcc,CRcbに基づいて演算結果の真偽判定を行うことで、車両1に対する物体の座標算出精度をよりいっそう高めることができる。
変形例の物体検出装置によれば、その他、上述の実施形態1の物体検出装置10と同様の効果を奏する。
なお、上述の実施形態および変形例の物体検出装置において、各構成要素に用いた「・・・部」という表記は、上述のとおり、「・・・回路(circuitry)」、「・・・アッセンブリ」、「・・・デバイス」、「・・・ユニット」、又は、「・・・モジュール」といった他の表記に置換されうる。
また、上述の実施形態および変形例の物体検出装置は、例えばROM13にインストールされているプログラムをCPU11が実行することにより、物体検出処理を行うこととした。
しかし、物体検出装置で実行されるプログラムは、インストール可能な形式または実行可能な形式のファイルでCD-ROM、フレキシブルディスク(FD)、CD-R、DVD(Digital Versatile Disk)等のコンピュータで読み取り可能な記録媒体に記録されて提供されてもよい。あるいは、ネットワークを介してプログラムをダウンロードし、コンピュータで実行させてもよい。
また、物体検出装置の機能の少なくとも一部が、CPUを有さない専用のハードウェア回路によって実現されてもよい。
このように、上述の実施形態および変形例の物体検出装置は、ソフトウェア、ハードウェア、またはハードウェアと連携したソフトウェアで実現することが可能である。また、上述の実施形態および変形例の物体検出装置は、システム、装置、方法、集積回路、コンピュータープログラム、または記録媒体で実現されてもよく、システム、装置、方法、集積回路、コンピュータープログラム、及び記録媒体の任意な組み合わせで実現されてもよい。なお、プログラム製品は、コンピュータープログラムが記録されたコンピュータが読み取り可能な媒体である。
また、上述の実施形態および変形例の物体検出装置の各機能ブロックは、部分的に、または全体的に、集積回路であるLSIとして実現され、上述の実施形態および変形例の物体検出装置の各処理は、部分的に、または全体的に、1つのLSIまたはLSIの組み合わせによって制御されてもよい。LSIは個々のチップから構成されてもよいし、機能ブロックの一部または全てを含むように1つのチップから構成されてもよい。LSIはデータの入力と出力とを備えてもよい。LSIは、集積度の違いにより、IC、システムLSI、スーパーLSI、ウルトラLSIと呼称されることもある。
ただし、集積回路化の手法はLSIに限るものではなく、専用回路、汎用プロセッサ又は専用プロセッサで実現してもよい。また、LSI製造後に、プログラムすることが可能なFPGA(Field Programmable Gate Array)、またはLSI内部の回路セルの接続および設定を再構成可能なリコンフィギュラブル・プロセッサを利用してもよい。上述の実施形態および変形例の物体検出装置の各処理が、デジタル処理またはアナログ処理として実現されてもよい。
さらには、半導体技術の進歩または派生する別技術によりLSIに置き換わる集積回路化の技術が登場すれば、当然、その技術を用いて機能ブロックの集積化を行ってもよい。バイオ技術の適用等が可能性としてあり得る。