JP7635591B2 - 水中沈殿物回収システム - Google Patents
水中沈殿物回収システム Download PDFInfo
- Publication number
- JP7635591B2 JP7635591B2 JP2021048193A JP2021048193A JP7635591B2 JP 7635591 B2 JP7635591 B2 JP 7635591B2 JP 2021048193 A JP2021048193 A JP 2021048193A JP 2021048193 A JP2021048193 A JP 2021048193A JP 7635591 B2 JP7635591 B2 JP 7635591B2
- Authority
- JP
- Japan
- Prior art keywords
- sediment
- container
- underwater
- robot
- robot body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Manipulator (AREA)
- Jet Pumps And Other Pumps (AREA)
Description
図1は、第1実施形態にかかる水中沈殿物回収システムによって沈殿物を回収する原子力発電所建屋10の概略図である。なお、第1実施形態では沈殿物を回収する施設として原子力発電所建屋10を例示したが、これに限定するものではない。水中に沈殿物が堆積している施設であれば、他の施設であっても第1実施形態の水中沈殿物回収システムを好適に用いることが可能である。
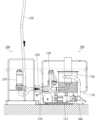
図5は、第2実施形態にかかる水中沈殿物回収システムによって沈殿物を回収する原子炉建屋10の概略図である。図6は、第2実施形態にかかる水中沈殿物回収システムの詳細を説明する図である。なお、第1実施形態と共通の構成要素については、同一の符号を付すことにより説明を省略する。
上述の第2実施形態では、汚染水が貯蔵されているフロアに配置されたステーション200に設けられている集積桝280、すなわち既設の集積桝280を用いる構成を例示したが、これに限定するものではない。既設の集積桝280が設けられてない場合には、仮設の集積桝を作業現場に搬入して据付し、かかる仮設の集積桝を用いる構成によっても上記と同様の効果を得ることが可能である。仮設の集積桝を用いる場合には、ポンプの排出力を利用して沈殿物を集積桝に移送してもよいし、重力を利用して沈殿物を集積桝に移送してもよい。
Claims (2)
- 水中を走行して沈殿物を回収する沈殿物回収ロボットと、該沈殿物回収ロボットとは非連結の状態で水中に固定設置されるステーションと含む沈殿物回収システムであって、
前記沈殿物回収ロボットは、
水中を走行可能なロボット本体と、
前記ロボット本体に装着され水中の沈殿物が回収されるコンテナと、
前記ロボット本体に搭載され沈殿物を含む水を吸引する内蔵ポンプと、
前記コンテナに連通する吸引ノズルと、
前記コンテナに連通する排出ノズルとを有し、
前記ステーションは、水中に配置され前記排出ノズルと連結されるソケットと、前記ソケットと接続される汲み上げポンプとを有することを特徴とする沈殿物回収システム。 - 水中を走行して沈殿物を回収する沈殿物回収ロボットと、該沈殿物回収ロボットとは非連結の状態で水中に固定設置されるステーションと含む沈殿物回収システムであって、
前記沈殿物回収ロボットは、
水中を走行可能なロボット本体と、
前記ロボット本体に装着され水中の沈殿物が回収されるコンテナと、
前記ロボット本体に搭載され沈殿物を含む水を吸引する内蔵ポンプと、
前記コンテナに連通する吸引ノズルと、
前記コンテナに連通する排出ノズルとを有し、
前記ロボット本体は、前記排出ノズルのシャッターを開いて回収された沈殿物を移送可能であって、
前記ステーションは、移送された沈殿物を貯留する集積枡と、前記集積枡から沈殿物を地上に汲み上げる汲み上げポンプとを有し、
前記ロボット本体には、前記コンテナを傾斜させて該コンテナの内部に回収された沈殿物を前記集積桝に移動させる傾斜機構が設けられていることを特徴とする沈殿物回収システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021048193A JP7635591B2 (ja) | 2021-03-23 | 2021-03-23 | 水中沈殿物回収システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021048193A JP7635591B2 (ja) | 2021-03-23 | 2021-03-23 | 水中沈殿物回収システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022147085A JP2022147085A (ja) | 2022-10-06 |
| JP7635591B2 true JP7635591B2 (ja) | 2025-02-26 |
Family
ID=83463614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021048193A Active JP7635591B2 (ja) | 2021-03-23 | 2021-03-23 | 水中沈殿物回収システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7635591B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116335223A (zh) * | 2023-03-16 | 2023-06-27 | 安徽省淮河河道工程有限公司 | 一种河道底泥的挖泥装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014125754A (ja) | 2012-12-25 | 2014-07-07 | Mitsubishi Heavy Ind Ltd | 汚泥回収装置及び方法 |
| JP2016204875A (ja) | 2015-04-17 | 2016-12-08 | 清 菊川 | 海底資源採掘システム |
| CN210564422U (zh) | 2019-10-22 | 2020-05-19 | 中石化石油工程技术服务有限公司 | 一种钻井岩屑回收系统 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3002895B2 (ja) * | 1990-09-12 | 2000-01-24 | 株式会社日立製作所 | 配管付着物回収ロボット |
| JP2961212B2 (ja) * | 1995-03-30 | 1999-10-12 | 運輸省第四港湾建設局長 | 水中浚渫ロボットによる浚渫方法 |
-
2021
- 2021-03-23 JP JP2021048193A patent/JP7635591B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014125754A (ja) | 2012-12-25 | 2014-07-07 | Mitsubishi Heavy Ind Ltd | 汚泥回収装置及び方法 |
| JP2016204875A (ja) | 2015-04-17 | 2016-12-08 | 清 菊川 | 海底資源採掘システム |
| CN210564422U (zh) | 2019-10-22 | 2020-05-19 | 中石化石油工程技术服务有限公司 | 一种钻井岩屑回收系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022147085A (ja) | 2022-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7567601B2 (ja) | 水中沈殿物回収ロボット | |
| CN106759607B (zh) | 一种沟渠清污装置 | |
| JP6963922B2 (ja) | 放射性物質の搬出装置、放射性物質の搬入装置並びに放射性物質の搬送システム及びその方法 | |
| JP7635591B2 (ja) | 水中沈殿物回収システム | |
| CN114155987B (zh) | 放射性核废金属的去污方法 | |
| CN219100298U (zh) | 用于全面清淤的高效清淤机器人 | |
| CN109364562A (zh) | 道路洗扫车收集垃圾的固液分离装置及污水处理方法 | |
| JP7567603B2 (ja) | 水中沈殿物回収ロボット | |
| JP7567604B2 (ja) | 水中沈殿物回収システム | |
| JP7567602B2 (ja) | 水中沈殿物回収ロボット | |
| CN113168928A (zh) | 辐射性构件去活化装置 | |
| JP2024170112A (ja) | 水中沈殿物回収ロボット | |
| CN216689726U (zh) | 一种管道干结淤泥清理疏通机器人 | |
| KR900004248B1 (ko) | 하수도내의 퇴적물 회수장치 | |
| CN208631348U (zh) | 一种建筑垃圾取料设备 | |
| CN114904860A (zh) | 一种废液贮罐淤泥回取机器人机构 | |
| JP7687013B2 (ja) | 水中沈殿物回収ロボット | |
| JP2025004447A (ja) | 水中沈殿物回収システムおよび水中沈殿物回収方法 | |
| CN118407483A (zh) | 一种煤矿巷道地沟清淤小车 | |
| CN216741614U (zh) | 一种采矿工程用巷道污泥处理装置 | |
| CN221345507U (zh) | 一种用于河道生态的拦污收集装置 | |
| CN218374145U (zh) | 一种沟槽清淤设备 | |
| CN118360986A (zh) | 一种煤矿巷道地沟清淤小车 | |
| CN111236344A (zh) | 水下清淤装置及使用该水下清淤装置的清淤装备 | |
| JP2025167390A (ja) | 燃料デブリ取出方法および燃料デブリ取出システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A80 | Written request to apply exceptions to lack of novelty of invention |
Free format text: JAPANESE INTERMEDIATE CODE: A80 Effective date: 20210422 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240904 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240910 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241028 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635591 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |