JP7616112B2 - 車両制御装置及びシステム - Google Patents
車両制御装置及びシステム Download PDFInfo
- Publication number
- JP7616112B2 JP7616112B2 JP2022016651A JP2022016651A JP7616112B2 JP 7616112 B2 JP7616112 B2 JP 7616112B2 JP 2022016651 A JP2022016651 A JP 2022016651A JP 2022016651 A JP2022016651 A JP 2022016651A JP 7616112 B2 JP7616112 B2 JP 7616112B2
- Authority
- JP
- Japan
- Prior art keywords
- communication
- signals
- vehicle
- priority
- delay amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/12—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W28/00—Network traffic management; Network resource management
- H04W28/02—Traffic management, e.g. flow control or congestion control
- H04W28/0231—Traffic management, e.g. flow control or congestion control based on communication conditions
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L45/00—Routing or path finding of packets in data switching networks
- H04L45/12—Shortest path evaluation
- H04L45/121—Shortest path evaluation by minimising delays
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L45/00—Routing or path finding of packets in data switching networks
- H04L45/24—Multipath
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L47/00—Traffic control in data switching networks
- H04L47/10—Flow control; Congestion control
- H04L47/24—Traffic characterised by specific attributes, e.g. priority or QoS
- H04L47/2425—Traffic characterised by specific attributes, e.g. priority or QoS for supporting services specification, e.g. SLA
- H04L47/2433—Allocation of priorities to traffic types
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/12—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks
- H04L67/125—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks involving control of end-device applications over a network
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W28/00—Network traffic management; Network resource management
- H04W28/02—Traffic management, e.g. flow control or congestion control
- H04W28/0273—Traffic management, e.g. flow control or congestion control adapting protocols for flow control or congestion control to wireless environment, e.g. adapting transmission control protocol [TCP]
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Small-Scale Networks (AREA)
- Traffic Control Systems (AREA)
- Mobile Radio Communication Systems (AREA)
Description
以下、本開示の実施形態について、図面を参照しながら詳細に説明する。
[構成]
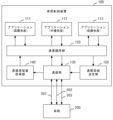
図1は、本開示の一実施形態に係る車両制御装置100と1つ以上の車両200とを含む、車両用システム10の概略構成図である。この車両用システム10は、車両制御装置100と各車両200とが、それぞれ複数の通信回線501、502、及び503を介して通信可能に接続された構成のシステムであり、例えば車両制御装置100が少なくとも1つの車両200を遠隔制御することができる。なお、車両制御装置100が通信可能な車両200の数は、図1に示した数に限られるものではない。
次に、図3をさらに参照して、本実施形態に係る車両制御装置100が実行する処理を説明する。図3は、車両制御装置100の各構成が実行する通信回線決定制御の処理手順を説明するフローチャートである。この図3に例示する通信回線決定制御は、車両制御装置100が車両200と通信可能に接続されると開始され、車両200との通信が終了するまで、複数のアプリケーション111、112、及び113の少なくともいずれかから信号の通信(送信及び受信の一方又は両方)が要求されるごとに、又は定期的に、繰り返し実行される。
通信遅延量取得部140は、車両200と車両制御装置100との間を接続する複数の通信回線501、502、及び503を1つにまとめた場合の通信遅延量である「全体通信遅延量」を取得する。通信遅延量取得部140は、例えば、通信部130を介して複数の通信回線501、502、及び503の全てを使用して車両200に対して所定のテスト信号を送受信することによって得られた結果などから、全体通信遅延量を取得することが可能である。なお、通信遅延量に代えて、通信遅延時間を取得するようにしてもよい。複数の通信回線を1つにまとめた全体通信遅延量が取得されると、ステップS302に処理が進む。
通信遅延量取得部140は、車両200と車両制御装置100との間を接続する複数の通信回線501、502、及び503ごとの通信遅延量である「個別通信遅延量」をそれぞれ取得する。通信遅延量取得部140は、例えば、通信部130を介して通信回線501、502、及び503のいずれか1つを使用して車両200に対して所定のテスト信号を送受信することによって得られた結果から、通信回線ごとの個別通信遅延量をそれぞれ取得することが可能である。なお、通信遅延量に代えて、通信遅延時間を取得するようにしてもよい。通信回線ごとの個別通信遅延量がそれぞれ取得されると、ステップS303に処理が進む。
通信調停部120は、通信遅延量取得部140が取得した全体通信遅延量の大きさを判定する。具体的には、通信調停部120は、全体通信遅延量が、予め定めた閾値T1未満であるか、閾値T1以上かつ予め定めた閾値T2未満であるか、閾値T2以上であるか、のいずれかを判定する(閾値T1<閾値T2)。この閾値T1には、各アプリケーション111、112、及び113から要求される複数の信号について、通信回線の割り当てを調停する必要があるか否かを判定するための遅延量が設定される。また、閾値T2には、各アプリケーション111、112、及び113から要求される複数の信号について、通信量の間引きをする必要があるか否かを判定するための遅延量が設定される。
通信回線決定部150は、各アプリケーション111、112、及び113から要求される各信号の優先度にかかわらず、各信号が通信に使用する通信回線を通信回線501、502、及び503の中からそれぞれ決定する。典型的には、通信回線決定部150は、各アプリケーション111、112、及び113から要求される各信号を、複数の通信回線501、502、及び503に平等に割り当てることを行う。平等の定義については、等データ量や等間隔など、特に限定されない。各アプリケーション111、112、及び113の各信号が通信に使用する通信回線が決定されると、ステップS308に処理が進む。
通信調停部120は、各アプリケーション111、112、及び113から要求される各信号のうち、優先度が低い信号に対する通信量の間引きを実施しない(未実施)と判断する。この判断は、全体通信遅延量が閾値T2未満であれば優先度が高い信号に通信リソースを十分に割り当てることが可能である、という理由に基づいている。優先度が低い信号に対する通信量の間引きを実施しない(未実施)と判断されると、ステップS307に処理が進む。
通信調停部120は、各アプリケーション111、112、及び113から要求される各信号のうち、優先度が低い信号に対する通信量の間引きを実施する。この判断は、全体通信遅延量が閾値T2以上になると優先度が高い信号に通信リソースを割り当てることが不可能である、という理由に基づいている。ここで、優先度が低いとは、基準となる所定の優先度に比べて低い優先度をいう。よって、優先度が低い信号は、例えば、所定の基準を高優先度の信号とした場合には、中優先度の信号及び低優先度の信号となり、所定の基準を中優先度の信号とした場合には、低優先度の信号となる。優先度が低い信号の通信量を間引く例としては、合計の通信データ量を削減させたり、通信レートを低下させたり、通信の周期を長くしたり、することなどが挙げられる。優先度が低い信号に対する通信量の間引きが実施されると、ステップS307に処理が進む。
通信回線決定部150は、各アプリケーション111、112、及び113から要求される各信号を、優先度が高い信号を優先させて、各信号が通信に使用する通信回線501、502、及び503をそれぞれ決定する。ここで、優先度が高いとは、基準となる所定の優先度に比べて高い優先度をいう。よって、優先度が高い信号は、例えば、所定の基準を中優先度の信号とした場合には、高優先度の信号となり、所定の基準を低優先度の信号とした場合には、中優先度の信号及び高優先度の信号となる。なお、このステップS307で判断する所定の基準は、上記ステップS306で判断する所定の基準と同じであっても異なっていてもよい。通信回線決定部150は、典型的には、通信遅延量取得部140が取得した個別通信遅延量が少ない通信回線を、優先度が高い信号に優先的に割り当てることを行う。優先度に基づいて各信号が通信に使用する通信回線が決定されると、ステップS308に処理が進む。
通信部130は、複数の通信回線501、502、及び503の中から通信回線決定部150によって割り当てが決定された1つ又は複数の通信回線を使用して、各アプリケーション111、112、及び113から要求される各信号の通信をそれぞれ実行する。各信号の通信が実行されると、本通信回線決定制御処理が終了する。
図1を用いた上記実施形態では、車両制御装置100が複数のアプリケーション111、112、及び113を実装する場合における機能(又はサービス)の実現を前提とした。このため、通信調停部120、通信部130、通信遅延量取得部140、及び通信回線決定部150の各構成は、車両制御装置100だけが備えていた。
以上のように、本開示の一実施形態に係る車両制御装置によれば、複数の通信回線を使用して車両との間の通信を行う。通信に際して、車両制御装置は、複数の通信回線の通信遅延量(全体、個別)を取得して、この取得した通信遅延量に基づいて車両との間で送受信する複数の信号に割り当てる通信回線をそれぞれ決定する。通信回線の決定においては、相対的に優先度が高い信号を、相対的に優先度が低い信号よりも、通信遅延量が少ない通信回線に優先して割り当てることを行う。
100 車両制御装置
111、112、113 アプリケーション
120 通信調停部
130 通信部
140 通信遅延量取得部
150 通信回線決定部
200 車両
501、502、503 通信回線
Claims (7)
- 車両と通信を行う車両制御装置であって、
複数の通信回線を使用して、前記車両との間で通信に関する優先度が予め設定された複数の信号の送受信を行う通信部と、
前記複数の通信回線それぞれの通信遅延量及び前記複数の通信回線をまとめた全体の通信遅延量を取得する取得部と、
前記通信遅延量、前記全体の通信遅延量、及び前記優先度に基づいて、前記複数の信号のそれぞれに割り当てる通信回線を決定する決定部と、を備え、
前記決定部は、
前記全体の通信遅延量が第1閾値未満である場合、前記複数の信号を、前記優先度に関わらず前記複数の通信回線に割り当て、
前記全体の通信遅延量が前記第1閾値以上かつ第2閾値未満である場合、前記複数の信号を、第1基準よりも前記優先度が高い信号を優先させて前記複数の通信回線に割り当て、
前記全体の通信遅延量が前記第2閾値以上である場合、前記複数の信号を、第2基準よりも前記優先度が低い信号の通信量を間引いた後、前記第1基準よりも前記優先度が高い信号を優先させて前記複数の通信回線に割り当て、
前記通信部は、前記決定部によって割り当てられた前記通信回線を用いて、前記車両との間で前記複数の信号それぞれの送受信を実行する、車両制御装置。 - 前記決定部は、所定の基準よりも前記優先度が高い信号を、前記通信遅延量が少ない通信回線に優先して割り当てる、請求項1に記載の車両制御装置。
- 前記複数の信号には、前記車両のユーザーによって、前記優先度の変更が不可能な信号と前記優先度の変更が可能な信号とが含まれる、請求項1又は2に記載の車両制御装置。
- 前記車両のユーザーによって前記優先度の変更が不可能な信号は、前記車両の安全及び安心に関わる高優先度の信号である、請求項3に記載の車両制御装置。
- 複数のアプリケーションを有し、
前記複数の信号は、前記複数のアプリケーションからの要求に基づく信号である、請求項1乃至4のいずれか1項に記載の車両制御装置。 - 前記通信遅延量に基づく前記車両と前記車両制御装置との間の通信遅延時間を用いて、仮想空間上に現実空間と時刻同期したデジタルツインを形成する、請求項1乃至5のいずれか1項に記載の車両制御装置。
- 複数の車両と、前記複数の車両と通信を行う車両制御装置と、を備えるシステムであって、
前記車両制御装置は、前記複数の車両のうち通信を行う対象車両ごとに、
複数の通信回線を使用して、前記対象車両との間で通信に関する優先度が設定された複数の信号の送受信を行う通信部と、
前記複数の通信回線それぞれの通信遅延量及び前記複数の通信回線をまとめた全体の通信遅延量を取得する取得部と、
前記通信遅延量、前記全体の通信遅延量、及び前記優先度に基づいて、前記複数の信号のそれぞれに割り当てる通信回線を決定する決定部と、を備え、
前記決定部は、
前記全体の通信遅延量が第1閾値未満である場合、前記複数の信号を、前記優先度に関わらず前記複数の通信回線に割り当て、
前記全体の通信遅延量が前記第1閾値以上かつ第2閾値未満である場合、前記複数の信号を、第1基準よりも前記優先度が高い信号を優先させて前記複数の通信回線に割り当て、
前記全体の通信遅延量が前記第2閾値以上である場合、前記複数の信号を、第2基準よりも前記優先度が低い信号の通信量を間引いた後、前記第1基準よりも前記優先度が高い信号を優先させて前記複数の通信回線に割り当て、
前記通信部は、前記決定部によって割り当てられた前記通信回線を用いて、前記対象車両との間で前記複数の信号それぞれの送受信を実行する、システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022016651A JP7616112B2 (ja) | 2022-02-04 | 2022-02-04 | 車両制御装置及びシステム |
| CN202310009167.3A CN116567015B (zh) | 2022-02-04 | 2023-01-04 | 车辆控制装置、系统以及车辆控制方法 |
| US18/152,620 US12513556B2 (en) | 2022-02-04 | 2023-01-10 | Vehicle control device, system, and vehicle control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022016651A JP7616112B2 (ja) | 2022-02-04 | 2022-02-04 | 車両制御装置及びシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023114339A JP2023114339A (ja) | 2023-08-17 |
| JP7616112B2 true JP7616112B2 (ja) | 2025-01-17 |
Family
ID=87488600
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022016651A Active JP7616112B2 (ja) | 2022-02-04 | 2022-02-04 | 車両制御装置及びシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12513556B2 (ja) |
| JP (1) | JP7616112B2 (ja) |
| CN (1) | CN116567015B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN121218113A (zh) | 2024-06-24 | 2025-12-26 | 福特全球技术公司 | 车辆与远程计算机通信 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007102406A (ja) | 2005-10-03 | 2007-04-19 | Mitsubishi Electric Corp | 車載情報端末 |
| JP2008305083A (ja) | 2007-06-06 | 2008-12-18 | Toyota Motor Corp | 情報処理装置及び情報処理方法 |
| JP2016101785A (ja) | 2014-11-27 | 2016-06-02 | クラリオン株式会社 | 情報処理装置および実行管理プログラム |
| WO2018012114A1 (ja) | 2016-07-15 | 2018-01-18 | ソニー株式会社 | 無線通信装置および無線通信方法 |
| JP2020113106A (ja) | 2019-01-15 | 2020-07-27 | 株式会社デンソー | 盗難車両追跡システム |
| JP2021132300A (ja) | 2020-02-19 | 2021-09-09 | 本田技研工業株式会社 | 通信制御装置、通信装置、通信システム、無線基地局、通信制御方法、及びプログラム |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013061700A (ja) * | 2011-09-12 | 2013-04-04 | Sony Corp | 情報処理装置、情報処理方法、記録媒体および情報処理システム |
| KR102441168B1 (ko) * | 2015-05-08 | 2022-09-07 | 삼성전자주식회사 | 차량 서비스를 위한 자원 할당 장치 및 방법 |
| US9958864B2 (en) | 2015-11-04 | 2018-05-01 | Zoox, Inc. | Coordination of dispatching and maintaining fleet of autonomous vehicles |
| US11006451B2 (en) | 2016-04-11 | 2021-05-11 | Ntt Docomo, Inc. | User equipment and signal transmission method |
| US10924971B2 (en) | 2016-05-11 | 2021-02-16 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Communication method, terminal device and network device |
| US10380886B2 (en) * | 2017-05-17 | 2019-08-13 | Cavh Llc | Connected automated vehicle highway systems and methods |
| CN110495228A (zh) * | 2017-02-13 | 2019-11-22 | 瑞典爱立信有限公司 | 基于延时需求的资源选择 |
| CN109151034A (zh) | 2018-08-31 | 2019-01-04 | 百度在线网络技术(北京)有限公司 | 自动驾驶车辆的远程控制方法、装置和服务器 |
| US11137754B2 (en) * | 2018-10-24 | 2021-10-05 | Ford Global Technologies, Llc | Intermittent delay mitigation for remote vehicle operation |
| EP4024364A4 (en) * | 2019-08-28 | 2022-08-24 | Mitsubishi Electric Corporation | DEVICE AND SYSTEM FOR ROUTE INSTRUCTION TO CHANGE LANES |
| US12581337B2 (en) * | 2019-10-22 | 2026-03-17 | Lg Electronics Inc. | Method and apparatus for transmitting information about channel state in NR V2X |
| CN112788089B (zh) | 2019-11-11 | 2023-11-07 | 财团法人工业技术研究院 | 多边缘云的网络通讯控制方法及边缘运算装置与系统 |
| JP7394653B2 (ja) * | 2020-02-19 | 2023-12-08 | 本田技研工業株式会社 | 通信装置、通信システム、無線基地局、通信制御方法、及びプログラム |
-
2022
- 2022-02-04 JP JP2022016651A patent/JP7616112B2/ja active Active
-
2023
- 2023-01-04 CN CN202310009167.3A patent/CN116567015B/zh active Active
- 2023-01-10 US US18/152,620 patent/US12513556B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007102406A (ja) | 2005-10-03 | 2007-04-19 | Mitsubishi Electric Corp | 車載情報端末 |
| JP2008305083A (ja) | 2007-06-06 | 2008-12-18 | Toyota Motor Corp | 情報処理装置及び情報処理方法 |
| JP2016101785A (ja) | 2014-11-27 | 2016-06-02 | クラリオン株式会社 | 情報処理装置および実行管理プログラム |
| WO2018012114A1 (ja) | 2016-07-15 | 2018-01-18 | ソニー株式会社 | 無線通信装置および無線通信方法 |
| JP2020113106A (ja) | 2019-01-15 | 2020-07-27 | 株式会社デンソー | 盗難車両追跡システム |
| JP2021132300A (ja) | 2020-02-19 | 2021-09-09 | 本田技研工業株式会社 | 通信制御装置、通信装置、通信システム、無線基地局、通信制御方法、及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US12513556B2 (en) | 2025-12-30 |
| CN116567015B (zh) | 2025-10-31 |
| CN116567015A (zh) | 2023-08-08 |
| US20230254725A1 (en) | 2023-08-10 |
| JP2023114339A (ja) | 2023-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7007097B1 (en) | Method and system for covering multiple resourcces with a single credit in a computer system | |
| US7240135B2 (en) | Method of balancing work load with prioritized tasks across a multitude of communication ports | |
| CN101662414B (zh) | 一种数据访问的处理方法、系统和装置 | |
| US8180730B2 (en) | Arbitration token for managing data integrity and data accuracy of information services that utilize distributed data replicas | |
| KR102287566B1 (ko) | 분산 시스템 아키텍처에서 애플리케이션을 실행하기 위한 방법 | |
| CN112486888A (zh) | 一种行情数据传输方法、装置、设备及介质 | |
| JP7616112B2 (ja) | 車両制御装置及びシステム | |
| KR20080112093A (ko) | 멀티 프로세서 환경에서 효율적인 데이터 전송을 위한 방법및 시스템 | |
| CN110764724A (zh) | 一种显示设备控制方法、装置、设备及存储介质 | |
| CN116821039A (zh) | 用于多核soc的应用通信系统、方法、设备及可读存储介质 | |
| CN116664377A (zh) | 数据传输方法及相关装置 | |
| US8364874B1 (en) | Prioritized polling for virtual network interfaces | |
| CN116569139A (zh) | 车载计算机、计算机执行方法及计算机程序 | |
| US20250321774A1 (en) | Signal processing device in vehicle and vehicle communication device including the same | |
| CN111597024A (zh) | 跨域集群处理方法、装置、电子设备及存储介质 | |
| CN118708327A (zh) | 一种数据处理的方法及相应装置 | |
| US20190155657A1 (en) | Resource assignment method using cda protocol in distributed processing environment and distributed processing device applying the same | |
| US20070150590A1 (en) | Computer system and storage virtualizer | |
| EP2588965B1 (en) | Method, apparatus and system for maintaining transaction coherecy in a multiple data bus platform | |
| CN105224626A (zh) | 一种分布式文件系统磁盘文件读写方法、装置和系统 | |
| US11580060B2 (en) | Policy driven latency control applied to a vehicular real time network apparatus | |
| CN114339683B (zh) | 车载无线短距离通信系统及其通信资源分配方法 | |
| JP3082297B2 (ja) | タスク制御方式 | |
| JP7798271B2 (ja) | 帯域幅の制御方法及びシステム、電子機器、乗り物及び記憶媒体 | |
| JP7674573B1 (ja) | 情報処理装置、情報処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240910 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240920 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7616112 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |