JP7591908B2 - 座標変換システム、座標変換方法及びプログラム - Google Patents
座標変換システム、座標変換方法及びプログラム Download PDFInfo
- Publication number
- JP7591908B2 JP7591908B2 JP2020192745A JP2020192745A JP7591908B2 JP 7591908 B2 JP7591908 B2 JP 7591908B2 JP 2020192745 A JP2020192745 A JP 2020192745A JP 2020192745 A JP2020192745 A JP 2020192745A JP 7591908 B2 JP7591908 B2 JP 7591908B2
- Authority
- JP
- Japan
- Prior art keywords
- coordinate
- trajectory
- movement trajectory
- movement
- transformation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Navigation (AREA)
- Image Analysis (AREA)
Description
GPSを用いる方法は、直接的に所定の周期における位置を検出して、検出結果として得た時系列の移動の軌跡を、絶対な座標(例えば、緯度軽度)を示す第1座標系、絶対座標系である第1座標系における第1移動軌跡として生成する(例えば、特許文献1)。
また、動画像を用いる方法は、例えばSLAM(Simultaneous Localization and Mapping)のように、動画像における画像間の被写体の大きさ変化や位置変化により、所定の周期毎の相対的な移動位置を示し、この移動位置を連結して得られる移動の軌跡を、相対的な位置変化を示す座標系である第2座標系における第1移動軌跡(相対的な変化位置に対応した移動軌跡)を生成する(例えば、特許文献2)。
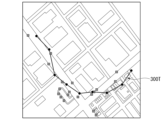
また、SLAMで求められる移動軌跡400T(以下、第2移動軌跡)は、図11で示すように、GPSで得られた移動軌跡300Tとは異なり、ノイズは少ない形状として求められるが、独自の座標系(以下、ローカル座標系)における相対的な位置変化を示す情報として示されているため、実際の距離に対応した移動軌跡を得ることができない。
ここで、座標変換を行うための上記線形変換行列は、例えば、Umeyama法(例えば、非特許文献1参照)が用いられている。
これにより、図12に示すように、図10のGPSによる移動軌跡に比較し、実際の移動軌跡に対応した滑らかな形状の移動軌跡400T’を得ることができる。
しかしながら、SLAMで生成した第2移動軌跡には、軌跡の周囲のスケールが徐々に大きくなる、あるいは小さくなるスケールドリフトの影響が反映される。
このため、図13に示すように、実際の軌跡(移動軌跡501T)に対して、SLAMのスケールドリフトの影響により、線形変換結果の第2移動軌跡(400T’)における移動における距離間隔が実際と異なってしまう。
以下、本発明の第1の実施形態による座標変換システムの構成例について、図面を参照して説明する。図1は、本発明の第1の実施形態による座標変換システムの構成例を示すブロック図である。図1において、座標変換システム100は、データ入出力部101、第1移動軌跡生成部102、第2移動軌跡生成部103、第2移動軌跡分割部104、変換行列生成部105、座標変換部106、表示部107、GPSデータ記憶部108、撮像画像データ記憶部109、移動軌跡データ記憶部110及び変換行列記憶部111の各々を備えている。
また、データ入出力部101は、入力されるGPSデータをGPSデータ記憶部108に対して、ID(identification)番号(識別情報の一例)を付与して、当該ID番号とともに時系列に書き込んで記憶させる。
ここで、GPS装置及び撮像装置の各々が、GPSデータ、撮像画像データそれぞれを取得するタイミングは、データ入出力部101により同期制御されている。
このため、GPSデータに付与されるID番号と撮像画像データに付与されるID番号とは、同一の番号である。
そして、第1移動軌跡生成部102は、生成した第1移動軌跡の曲線データを移動軌跡データ記憶部110に対して書き込んで記憶させる。
図2は、第1移動軌跡生成部102が生成する第1移動軌跡の曲線データの一例を示す図である。図2において、ID番号に対応した、GPSデータの示す座標点201Pが、絶対座標系である緯度、経度及び高度からなる3次元座標系上に配置され、座標点201Pの各々が、ID番号の順番に線分201Lにより接続されている。
そして、第2移動軌跡生成部103は、生成した第2移動軌跡の曲線データを、移動軌跡データ記憶部110に対して書き込んで記憶させる。
また、枠303、304及び305の各々は、第2移動軌跡を複数の移動位置単位(図3においては5個単位)で分割(分離)して分割第2移動軌跡(後述)を生成するための分割対象の移動位置を選択する枠である。
このとき、変換行列生成部105は、分割第2移動軌跡における座標点と、第1移動軌跡における座標点とにおいて、同一のID番号の座標点間の距離、すなわち誤差(また、Umeyama法を用いた場合には誤差の二乗)の合計が最小となる位置に線形座標変換を行う変換行列を生成する。すなわち、この変換行列は、分割第2移動軌跡における座標点を第2座標系から、第1座標系の座標値に線形座標変換を行う行列である。
そして、変換行列生成部105は、生成した変換行列を変換行列記憶部111に対して書き込んで記憶させる。
変換行列M1は、ID番号がID1からID5までの座標値を含む分割第2移動軌跡(例えば、図3における枠303で分割された座標点から成る移動軌跡)を、当該ID番号がID1からID5の座標値の各々が、第1移動軌跡のID番号がID1からID5それぞれに対応して線形座標変換を行う変換行列である。
他の、変換行列M3からM5の各々も、上述した変換行列M1及びM2の各々と同様である。
本実施形態においては、ID番号を一つずつ進行方向にシフトさせて、分割第2移動軌跡の各々を生成するため、それぞれの分割第2移動軌跡に含まれる移動位置は、当該分割第2移動軌跡の前後の分割第2移動軌跡と重複している。
このとき、座標変換部106は、第2座標系における座標点の各々の線形座標変換に用いる変換行列の選択を行う。
例えば、座標変換部106は、第2座標系における座標変換対象の座標点が中央にある分割第2移動軌跡に対応した変換行列を変換行列記憶部111から読出し、当該変換行列を用いて座標点の第2座標系から第1座標系への線形座標変換を行う。図4を例とした場合、座標変換部106は、第2移動軌跡におけるID5の座標点を、第2座標系から第1座標系に線形座標変換を行う際に、変換行列M3を変換行列記憶部111から読出して使用する。
図5に示す変換行列の場合、第2座標系におけるID番号がID5の座標点に対しては、変換行列M3の要素の重み係数を最も大きくし、変換行列M2及びM4の重み係数を変換行列M3の重み係数に比較してより小さく、変換行列M1及びM5の重み係数を変換行列M2及びM4の重み係数に比較してより小さく設定する。
ステップS101:データ入出力部101は、GPS装置から供給されるGPSデータをGPSデータ記憶部108に、付与したID番号とともに時系列に書き込んで記憶させる。
そして、第1移動軌跡生成部102は、生成した第1移動軌跡の曲線データを移動軌跡データ記憶部110に書き込んで記憶させる。
そして、第2移動軌跡生成部103は、第2座標系に配置された座標値をID番号の順番に線分で連結し、第2移動軌跡の曲線データを生成する。
そして、第2移動軌跡生成部103は、生成した第2移動軌跡の曲線データを移動軌跡データ記憶部110に書き込んで記憶させる。
そして、第2移動軌跡分割部104は、所定の数の移動位置の座標を含む分割第2移動軌跡それぞれに、移動位置を時系列に一個ずつ移動軌跡の分割を行なう枠をシフトさせて第2移動軌跡を分割する(図3及び図4)。
第2移動軌跡分割部104は、第2移動軌跡を分割して生成した分割第2移動軌跡の各々を、移動軌跡データ記憶部110に書き込んで記憶させる。
そして、変換行列生成部105は、分割第2移動軌跡に含まれる座標値の各々を、第1座標系における第1移動軌跡における同一のID番号の座標値それぞれに対応して、当該同一のID番号を有する座標値の各々の間の距離が最も近くなるように、第2座標系から第1座標系に線形座標変換させる変換行列を生成する。
変換行列生成部105は、生成した変換行列を、当該変換行列に対応する分割第2移動軌跡に含まれる座標値のID番号の組に対応させて、変換行列とID番号の組とを変換行列記憶部111に書き込んで記憶させる。
このとき、変換行列生成部105は、第2移動軌跡を分割した分割第2移動軌跡の全てに対応する変換行列を生成した場合、処理をステップS109へ進める。
一方、変換行列生成部105は、第2移動軌跡を分割した分割第2移動軌跡の全てに対応する変換行列を生成していない場合、処理をステップS107へ進める。
次に、座標変換部106は、例えば、変換行列記憶部111から処理対象の座標点のID番号が含まれるすべての分割第2移動軌跡に対応した変換行列の各々を、変換行列記憶部111が読み出す。
そして、座標変換部106は、読み出した変換行列における同一の列及び行の各々の要素の平均値を算出し、この平均値を要素とする平均変換行列を求め、第2座標系における座標点を第1座標系に変換する変換行列の準備を行う。
座標変換部106は、第2座標系の座標点から第1座標系に座標変換した座標点を、ID番号ととともに移動軌跡データ記憶部110に書き込んで記憶させる。
このとき、座標変換部106は、第2移動軌跡における全ての座標点を第1座標系に座標変換した場合、処理をステップS112へ進める。
一方、座標変換部106は、第2移動軌跡における全ての座標点を第1座標系に座標変換していない場合、処理をステップS109へ進める。
そして、座標変換部106は、第1座標系に配置された座標点の各々を、ID番号の順番に連結し、推定移動軌跡の曲線データを生成する。
座標変換部106は、生成した推定移動軌跡の曲線データを、移動軌跡データ記憶部110に対して書き込んで記憶させる。
また、座標変換部106は、生成した推定移動軌跡の曲線データを表示部107の表示画面に対して表示する構成としてもよい(後述する図9に示す表示画面のように)。
以下、本発明の第2の実施形態による座標変換システムの構成例について、図面を参照して説明する。図6は、本発明の第2の実施形態による座標変換システムの構成例を示すブロック図である。図6において、座標変換システム100Aは、データ入出力部101、第1移動軌跡生成部102、第2移動軌跡生成部103、第2移動軌跡分割部104、変換行列生成部105、座標変換部106、表示部107、GPSデータ記憶部108、撮像画像データ記憶部109、移動軌跡データ記憶部110、変換行列記憶部111及び変換行列補正部112の各々を備えている。図6に示す座標変換システム100Aは、図1に示す第1の実施形態における構成と同様の構成に対し、同一の符号を付してある。
以下、第1の実施形態と異なる構成及び動作について説明する。
ここで、変換行列補正部112は、変換行列生成部105が生成した変換行列の集合(M1,M2,M3,M4,M5,…,Mn)において、隣接する分割第2移動軌跡の各々の間で、同一の列及び行の位置にある要素のそれぞれの行列間における変化量を小さくする(以降、変換行列を滑らかにすると示す)処理を行う。ここで、nは整数。
このため、変換行列Mnにおいては、変換に用いるスカラー値としては12個の要素がある。
すなわち、変換行列補正部112は、スカラー値である要素の12個に対応して、12個の変数の系列を生成する。
図7は、隣接する分割第2移動軌跡に対応する変換行列の各々を、ガウス過程を用いて滑らかにする処理を説明する図である。
図7は、縦軸が変数(要素のスカラー値)の数値を示し、横軸が分割第2移動軌跡に対応した変換行列の時系列の順番を示している。
番号「1」から「8」の各々が変換行列M1からM8それぞれを示している。また、x1_11からx8_11の各々は、それぞれ変換行列M1からM8それぞれの…の各々は、第1行目、第1列目の要素のスカラー値を示している。
すなわち、変換行列補正部112は、例えば、番号1から番号8の各々のスカラー値x1_11からx8_11を用いて、入力値(移動軌跡の進行方向の順番により付された変換行列の番号)の各々に対応して出力される、隣接する変換行列における同一の列及び行の位置にある要素、すなわち関数の出力値(スカラー値)それぞれが滑らかな変化を有する関係となる関数Fを生成する。
これにより、関数Fは、例えば、番号1が入力されるとスカラー値x1_11’を出力し、番号2が入力されるとスカラー値x2_11’を出力する。同様に、関数Fは、他の番号3から番号8の各々が入力された場合、スカラー値x3_11’からx8_11’それぞれを出力する。
そして、変換行列補正部112は、上述した変換行列M1からM8それぞれの第1行目、第1列目の要素のスカラー値の集合と同様に、変換行列を滑らかとする関数を作成して、第i行目(1≦i≦3、iは整数)、第j列目(1≦j≦4、jは整数)の要素の各々の補正系列を生成する。
また、変換行列補正部112は、生成した補正変換行列M1’からMn’の各々を変換行列記憶部111に対して書き込んで記憶させる。
座標変換部106は、変換行列記憶部111から、変換行列生成部105が生成した変換行列M1からM8の各々に換え、変換行列補正部112の生成した補正変換行列M1’からMn’のそれぞれを読出す。
そして、座標変換部106は、変換行列(M1からM8)に換えて、読み出した補正変換行列(例えば、M1’からM8’など)を用いて、第1に実施形態と同様に、第2座標系における第2移動軌跡の座標点(移動位置)を、第1座標系における座標点に座標変換を行う。
図8におけるステップS201~S208と、ステップS210~S213との各々においては、第1の実施形態における図5におけるステップS101~S108と、ステップS109~S112と同様の処理が行われる。以下、ステップS209及びS210の各々の説明を行う。
そして、変換行列補正部112は、変換行列M1~Mnにおける同一の列及び行の位置にある要素のスカラー値を離散的な学習データとして、ガウス過程を用いて隣接する変換行列間における要素のスカラー値の変化量が、補正前に比較してより小さくなるスカラー値として、番号に対応して出力される関数Fを求める。
これにより、変換行列補正部112は、補正系列として変換行列M1~Mnの各々における全ての要素のスカラー値を関数Fから算出することにより、補正変換行列M1’~Mn’それぞれを生成する。
そして、変換行列補正部112は、生成した補正変換行列M1’~Mn’の各々を、変換行列記憶部111に対して書き込んで記憶させる。
次に、座標変換部106は、例えば、変換行列記憶部111から処理対象の座標点のID番号が含まれるすべての分割第2移動軌跡に対応した補正変換行列(M1’~Mn’)の各々を、変換行列記憶部111が読み出す。
そして、座標変換部106は、読み出した補正変換行列における同一の列及び行の各々の要素の平均値を算出し、この平均値を要素とする平均変換行列を求め、第2座標系における座標点を第1座標系に変換する変換行列の準備を行う。
図9において、座標点501Pが実測により測定した移動点であり、座標点502Pが推定移動軌跡における移動点である。
また、線分501Lが実測により測定した移動点を連結した線分であり、線分502Lが推定移動軌跡における移動点を連結した線分である。
本実施形態による推定移動軌跡が、実測した移動軌跡に対し、移動点の位置及び軌跡の形状が良く対応していることが図9から判る。
以下、本発明の第3の実施形態による座標変換システムについて説明する。第3の実施形態の座標変換システムの構成は、図6に示す第2の実施形態の構成と同様である。
以下、第2の実施形態と異なる動作の説明を行う。
第2の実施形態においては、変換行列M1~Mnの各々における要素(変数)の系列(x1_ij,x2_ij,x2_ij,…,xn_ij)の隣接するスカラー値の平滑化をガウス過程を用いて行ったが、第3の実施形態においてはカルマンフィルタを用いて行う。第2移動軌跡から生成した分割第2移動軌跡の各々に対応して、変換行列M1からMnのそれぞれは、第2移動軌跡における移動体の進行方向に向かって、符号の順番で連続した関係を有している。
そして、上記カルマンフィルタは、変換行列Mk-1の第i行目、第j列目の要素のスカラー値と、変換行列Mk-1の第i行目、第j列目の要素の推定値とから、変換行列Mkの第i行目、第j列目の要素の推定値r(k)_ijを指定して出力する。
そして、変換行列補正部112は、変換行列M1からMnの各々の行及び列における要素の全てに対する補正系列を用いて、補正変換行列M1’からMn’の各々を生成する。
変換行列補正部112は、生成した補正変換行列M1’からMn’の各々を、変換行列記憶部111に対して書き込んで記憶させる。
本実施形態においては、第1座標系及び第2座標系の各々を3次元空間を示す3次元座標系として示したが、2次元座標系として構成してもよい。この場合、第1座標系の場合には、緯度及び経度の示す2次元平面に対応し、第2座標系は2次元平面上における移動軌跡の形状を示す。
101…データ入出力部
102…第1移動軌跡生成部
103…第2移動軌跡生成部
104…第2移動軌跡分割部
105…変換行列生成部
106…座標変換部
107…表示部
108…GPSデータ記憶部
109…撮像画像データ記憶部
110…移動軌跡データ記憶部
111…変換行列記憶部
112…変換行列補正部
Claims (6)
- GPS(Global Positioning System)により計測した移動体の時系列な移動位置の各々を用いて、実距離の第1座標系における第1移動軌跡を生成する第1移動軌跡生成部と、
移動する風景を撮像した時系列な撮像画像の各々を用いて、前記移動体の相対的な位置の変化を示す第2座標系における第2移動軌跡を生成する第2移動軌跡生成部と、
前記第2移動軌跡を所定の幅に分割して分割第2移動軌跡の各々を生成する第2移動軌跡分割部と、
前記第1移動軌跡の座標点のそれぞれとの距離の合計値が最小または距離の二乗の合計値が最小となる第1座標系における位置に、前記第1移動軌跡の座標点の識別番号と同一の識別番号を有する前記分割第2移動軌跡における座標点を線形変換させる変換行列を生成する変換行列生成部と、
前記変換行列により前記分割第2移動軌跡の各々を、第1座標系における前記第1移動軌跡の対応する部分に合わせて線形座標変換を行い、前記移動体の移動の軌跡を推定した推定移動軌跡を生成する座標変換部と、
を備えることを特徴とする座標変換システム。 - 前記分割第2移動軌跡の各々を、第1座標系における前記第1移動軌跡の部分に対応して座標変換する変換行列を補正する変換行列補正部をさらに備え、
前記座標変換部が、
前記分割第2移動軌跡の各々を、前記第2座標系から前記第1座標系における前記第1移動軌跡に対応して線形変換する前記変換行列を生成し、
前記変換行列補正部が、隣接する分割第2移動軌跡の各々の前記変換行列における要素それぞれの変化量を低減する補正を行い、
前記座標変換部が、
前記変換行列補正部が補正した前記変換行列を用いて、前記分割第2移動軌跡の座標変換を行い、前記推定移動軌跡を生成する
ことを特徴とする請求項1に記載の座標変換システム。 - 前記変換行列補正部が、
隣接する分割第2移動軌跡の各々の前記変換行列における要素のそれぞれを、より変化量が低減された数値とする関数をガウス過程により求め、前記変換行列の前記要素を当該関数により算出する
ことを特徴とする請求項2に記載の座標変換システム。 - 前記変換行列補正部が、
隣接する分割第2移動軌跡の各々の前記変換行列における要素を、連続する前記分割第2移動軌跡それぞれの当該変換行列の元々の要素を用いてカルマンフィルタにより推定した数値にとする
ことを特徴とする請求項2に記載の座標変換システム。 - 第1移動軌跡生成部が、GPS(Global Positioning System)により計測した移動体の時系列な移動位置の各々を用いて、実距離の第1座標系における第1移動軌跡を生成する第1移動軌跡生成過程と、
第2移動軌跡生成部が、移動する風景を撮像した時系列な撮像画像の各々を用いて、前記移動体の相対的な位置の変化を示す第2座標系における第2移動軌跡を生成する第2移動軌跡生成過程と、
第2移動軌跡分割部が、前記第2移動軌跡を所定の幅に分割して分割第2移動軌跡の各々を生成する第2移動軌跡分割過程と、
変換行列生成部が、前記第1移動軌跡の座標点のそれぞれとの距離の合計値が最小または距離の二乗の合計値が最小となる第1座標系における位置に、前記第1移動軌跡の座標点の識別番号と同一の識別番号を有する前記分割第2移動軌跡における座標点を線形変換させる変換行列を生成する変換行列生成過程と、
座標変換部が、前記変換行列により前記分割第2移動軌跡の各々を、第1座標系における前記第1移動軌跡の対応する部分に合わせて線形座標変換を行い、前記移動体の移動の軌跡を推定した推定移動軌跡を生成する座標変換過程と、
を含むことを特徴とする座標変換方法。 - コンピュータを、
GPS(Global Positioning System)により計測した移動体の時系列な移動位置の各々を用いて、実距離の第1座標系における第1移動軌跡を生成する第1移動軌跡生成手段、
移動する風景を撮像した時系列な撮像画像の各々を用いて、前記移動体の相対的な位置の変化を示す第2座標系における第2移動軌跡を生成する第2移動軌跡生成手段、
前記第2移動軌跡を所定の幅に分割して分割第2移動軌跡の各々を生成する第2移動軌跡分割手段、
前記第1移動軌跡の座標点のそれぞれとの距離の合計値が最小または距離の二乗の合計値が最小となる第1座標系における位置に、前記第1移動軌跡の座標点の識別番号と同一の識別番号を有する前記分割第2移動軌跡における座標点を線形変換させる変換行列を生成する変換行列生成手段、
前記変換行列により前記分割第2移動軌跡の各々を、第1座標系における前記第1移動軌跡の対応する部分に合わせて線形座標変換を行い、前記移動体の移動の軌跡を推定した推定移動軌跡を生成する座標変換手段、
として機能させるプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020192745A JP7591908B2 (ja) | 2020-11-19 | 2020-11-19 | 座標変換システム、座標変換方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020192745A JP7591908B2 (ja) | 2020-11-19 | 2020-11-19 | 座標変換システム、座標変換方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022081296A JP2022081296A (ja) | 2022-05-31 |
| JP7591908B2 true JP7591908B2 (ja) | 2024-11-29 |
Family
ID=81799392
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020192745A Active JP7591908B2 (ja) | 2020-11-19 | 2020-11-19 | 座標変換システム、座標変換方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7591908B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7835491B2 (ja) * | 2023-03-02 | 2026-03-25 | Necソリューションイノベータ株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| CN116839612B (zh) * | 2023-06-30 | 2026-01-06 | 惠州市德赛西威汽车电子股份有限公司 | 一种车辆路径点确定方法、装置、车辆及存储介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011043419A (ja) | 2009-08-21 | 2011-03-03 | Sony Corp | 情報処理装置、および情報処理方法、並びにプログラム |
| JP2013537995A (ja) | 2010-09-24 | 2013-10-07 | エボリューション・ロボティクス・インコーポレイテッド | Vslam最適化のためのシステムおよび方法 |
| JP2018517979A (ja) | 2015-05-22 | 2018-07-05 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 走行レーンを推定するための方法 |
| JP2018124787A (ja) | 2017-01-31 | 2018-08-09 | 富士通株式会社 | 情報処理装置、データ管理装置、データ管理システム、方法、及びプログラム |
| JP2020067439A (ja) | 2018-10-26 | 2020-04-30 | 富士通株式会社 | 移動体位置推定システムおよび移動体位置推定方法 |
| JP2020153956A (ja) | 2019-03-22 | 2020-09-24 | 富士通株式会社 | 移動体位置推定システムおよび移動体位置推定方法 |
-
2020
- 2020-11-19 JP JP2020192745A patent/JP7591908B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011043419A (ja) | 2009-08-21 | 2011-03-03 | Sony Corp | 情報処理装置、および情報処理方法、並びにプログラム |
| JP2013537995A (ja) | 2010-09-24 | 2013-10-07 | エボリューション・ロボティクス・インコーポレイテッド | Vslam最適化のためのシステムおよび方法 |
| JP2018517979A (ja) | 2015-05-22 | 2018-07-05 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 走行レーンを推定するための方法 |
| JP2018124787A (ja) | 2017-01-31 | 2018-08-09 | 富士通株式会社 | 情報処理装置、データ管理装置、データ管理システム、方法、及びプログラム |
| JP2020067439A (ja) | 2018-10-26 | 2020-04-30 | 富士通株式会社 | 移動体位置推定システムおよび移動体位置推定方法 |
| JP2020153956A (ja) | 2019-03-22 | 2020-09-24 | 富士通株式会社 | 移動体位置推定システムおよび移動体位置推定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022081296A (ja) | 2022-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20060193535A1 (en) | Image matching method and image interpolation method using the same | |
| JP7271244B2 (ja) | Cnn処理装置、cnn処理方法、およびプログラム | |
| JP2006091011A (ja) | マルチビュー視差表示 | |
| CN114556421A (zh) | 使用图像处理的场景表示 | |
| CN111830543B (zh) | 提供校正数据的方法、网络-rtk网络元件和网络-rtk流动站 | |
| JP7591908B2 (ja) | 座標変換システム、座標変換方法及びプログラム | |
| US20040257452A1 (en) | Recursive least squares approach to calculate motion parameters for a moving camera | |
| CN112508996A (zh) | 无锚点孪生网络角点生成的目标跟踪方法及装置 | |
| JP7622837B2 (ja) | 物体検出装置および方法 | |
| WO2021057309A1 (zh) | 跟踪目标确定方法及相关设备 | |
| CN111028265A (zh) | 一种基于迭代法构建相关滤波响应的目标跟踪方法 | |
| US20090010530A1 (en) | Information processing system | |
| El Akkad et al. | Reconstruction of 3D scenes by camera self-calibration and using genetic algorithms | |
| TWI462056B (zh) | 影像處理方法,裝置及電腦程式產品 | |
| CN110428461B (zh) | 结合深度学习的单目slam方法及装置 | |
| JP2009109200A (ja) | 位置姿勢推定システム、位置姿勢推定装置、および位置姿勢推定方法 | |
| WO2020149044A1 (ja) | パラメータ選定装置、パラメータ選定方法、およびパラメータ選定プログラム | |
| JP7118295B1 (ja) | 画像処理装置、プログラム及び画像処理方法 | |
| US7310440B1 (en) | Replacement sensor model for optimal image exploitation | |
| JP2016157174A (ja) | 3次元空間データ補間プログラム、ならびに、それを組み合わせて実現する形状発生プログラム | |
| CN113592710B (zh) | 一种基于深度学习的时空轨迹数据质量增强方法及装置 | |
| JP2020041950A (ja) | 測量装置、測量方法、及びプログラム | |
| CN113537351B (zh) | 面向移动设备拍摄的遥感图像坐标匹配方法 | |
| JP6315542B2 (ja) | 画像生成装置及び画像生成方法 | |
| Lewis et al. | Smart point landmark distribution for thin-plate splines |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231016 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240305 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240502 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240703 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241001 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241022 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241119 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7591908 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |