JP7589652B2 - 車両制御システム - Google Patents
車両制御システム Download PDFInfo
- Publication number
- JP7589652B2 JP7589652B2 JP2021107035A JP2021107035A JP7589652B2 JP 7589652 B2 JP7589652 B2 JP 7589652B2 JP 2021107035 A JP2021107035 A JP 2021107035A JP 2021107035 A JP2021107035 A JP 2021107035A JP 7589652 B2 JP7589652 B2 JP 7589652B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- driving force
- steering
- angle change
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/025—Control of vehicle driving stability related to comfort of drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18054—Propelling the vehicle related to particular drive situations at stand still, e.g. engine in idling state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18063—Creeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/181—Preparing for stopping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0162—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input mainly during a motion involving steering operation, e.g. cornering, overtaking
- B60G17/0163—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input mainly during a motion involving steering operation, e.g. cornering, overtaking the control involving steering geometry, e.g. four-wheel steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/017—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their use when the vehicle is stationary, e.g. during loading, engine start-up or switch-off
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0195—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the regulation being combined with other vehicle control systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2200/00—Indexing codes relating to suspension types
- B60G2200/40—Indexing codes relating to the wheels in the suspensions
- B60G2200/46—Indexing codes relating to the wheels in the suspensions camber angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2200/00—Indexing codes relating to suspension types
- B60G2200/40—Indexing codes relating to the wheels in the suspensions
- B60G2200/464—Caster angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/24—Steering, cornering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K2007/0038—Disposition of motor in, or adjacent to, traction wheel the motor moving together with the wheel axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K2007/0061—Disposition of motor in, or adjacent to, traction wheel the motor axle being parallel to the wheel axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K2007/0092—Disposition of motor in, or adjacent to, traction wheel the motor axle being coaxial to the wheel axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K7/0007—Disposition of motor in, or adjacent to, traction wheel the motor being electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/40—Torque distribution
- B60W2720/403—Torque distribution between front and rear axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Vehicle Body Suspensions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Description
本発明の目的は、停車状態又は微速走行状態において、転舵輪の転舵角を変更するために必要な力を低減可能な車両制御システムを提供することである。
カムボルト672の頭部には、例えば減速機構を介して、電動モータ68の出力軸が連結されている。電動モータ68は、図示しないが、モータハウジングが車体BDに対して回転不能に且つ前後方向に移動可能に、車体BDに固定されている。電動モータ68の出力軸が回転することで、アジャストカム67が回転し、アッパアーム63の左右方向の位置が変更される。
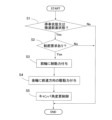
制御装置4は、車両が停車している停車状態、又は停車状態を起算点として車速が所定車速を超えることなく車両が前進方向及び後進方向のうち予め設定された方向に走行している微速走行状態において、転舵要求を受信した場合、転舵輪である前輪11のキャスタ角が減少するように、駆動力付与装置2、又は駆動力付与装置2及び制動力付与装置3を制御するキャスタ角変更制御を実行するように構成されている。
キャスタ角変更制御によれば、一方輪に対して他方輪に向かう方向の駆動力が付与され、他方輪にそれに対抗する力(制動力又は一方輪側への駆動力)が付与されるため、車体BDに対して前進中の減速時に生じる慣性力のような力(モーメント)が加わる。換言すると、キャスタ角変更制御により、車体BDには前転方向のピッチングモーメントのような力が加わるといえる。車体BDにこのような力が加わることで、構造上、キングピン軸線KLの上側の通過点65aを構成する上側パーツ(本例ではアッパアーム63及びボールジョイント65)に前方への力が加わり、当該上側パーツに配置された弾性部材(本例ではブッシュ71)が弾性変形する。この弾性変形により、アッパアーム63及びキングピン軸線KLの上側の通過点65aが、キングピン軸線KLの下側の通過点64aに対して前方に相対移動する。
第1キャスタ角変更制御は、駆動力付与装置2が後輪12に駆動力を付与可能に構成された車両、すなわち後輪駆動車又は四輪駆動車にて実行可能な制御である。第1キャスタ角変更制御において、微速走行状態は、停車状態を起算点として車速が所定車速を超えることなく車両が前進している状態(以下「微速前進状態」ともいう)である。
第2キャスタ角変更制御は、駆動力付与装置2が前輪11に駆動力を付与可能に構成された車両、すなわち前輪駆動車又は四輪駆動車にて実行可能な制御である。第2キャスタ角変更制御において、微速走行状態は、停車状態を起算点として車速が所定車速を超えることなく車両が後進している状態(以下「微速後進状態」ともいう)である。
第3キャスタ角変更制御は、駆動力付与装置2が前輪11及び後輪12に駆動力を付与可能に構成された車両、すなわち四輪駆動車にて実行可能な制御である。制御装置4は、停車状態又は微速走行状態において、転舵要求を受信した場合、第3キャスタ角変更制御として、前輪11に後進方向の駆動力を付与し、且つ後輪12に前進方向の駆動力を付与する。
制御装置4は、さらにキャンバ角変更制御を実行可能に構成されている。上記のように、車両制御システム1は、前輪11(転舵輪)に対して設けられた、回転によりキャンバ角θ2を変更可能なアジャストカム67と、アジャストカム67を回転させる電動モータ68と、を備えている。アジャストカム67はキャンバ角調整機構の一例であり、電動モータ68は駆動源の一例である。制御装置4は、車速に応じて、電動モータ68を制御し、キャンバ角θ2を調整するキャンバ角変更制御を実行する。電動モータ68の回転によりアジャストカム67が回転し、アッパアーム63の左右方向の位置が変更される。以下、キャンバ角θ2を、キャンバ角θ2の絶対値として説明する。
転舵に必要な力(転舵モータ522bの負荷)を小さくする制御として、制御装置4は、キャスタ角変更制御及びキャンバ角変更制御の他に、左右の車輪に互いに異なる駆動力を付与する転舵アシスト制御を実行してもよい。制御装置4は、車両を前進させて曲げる際、転舵アシスト制御として、例えば、旋回外輪に前進方向の駆動力を付与し、旋回内輪に後進方向の駆動力を付与してもよい。これにより、曲がりたい向きにヨーモーメントが発生し、転舵に必要な力は小さくなる。上記の転舵アシスト制御において、制御装置4は、旋回内輪に対して、旋回外輪の駆動力よりも小さい前進方向の駆動力(0を含む)を付与してもよいし、あるいは制動力を付与してもよい。これによっても、曲がりたい向きにヨーモーメントを発生させることができる。前進同様の原理により、後進の際も転舵アシスト制御は実行可能である。
本発明は、上記実施形態に限られない。例えば、駆動力付与装置2の駆動源は、インホイールモータ21に限らず、例えばエンジンや車体BDに配置されたモータであってもよい。本発明は、例えばガソリン車、ハイブリッド車、電気自動車、及び燃料電池車の何れでも適用可能である。また、車両が後輪駆動車であれば第1キャスタ角変更制御を適用でき、車両が前輪駆動車であれば第2キャスタ角変更制御を適用できる。また、本発明は、自動運転車にも適用できる。
また、ストラット型であっても、例えばストラットボルトとしてアジャストカムを採用して実施形態同様に電動モータでキャンバ角を調整するキャスタ角変更制御を実行することもできる。また、キャンバ角調整機構は、例えば、アッパアーム63の一端部に固定されたナットと、ナットに螺合したボルトとで構成されてもよい。実施形態のように電動モータの駆動力でボルトを回転させることで、ナット及びアッパアーム63の左右方向の位置を調整することもできる。また、アッパアーム63とベース板61との接続構成は、アジャストカム67に限らず、ボルトとナットを用いた構成であってもよい。このような構成でも接続部分には弾性部材(例えばブッシュ)が配置されている。このように、本発明は、上記実施形態の他、当業者の知識に基づいて種々の変更、改良を施した種々の形態で実施することができる。
Claims (7)
- 前輪及び後輪の少なくとも一方に駆動力を付与する駆動力付与装置と、
前記前輪及び前記後輪に制動力を付与する制動力付与装置と、
前記駆動力付与装置が付与する駆動力及び前記制動力付与装置が付与する制動力を制御する制御装置と、
を備える車両制御システムであって、
前記制御装置は、車両が停車している停車状態、又は前記停車状態を起算点として車速が所定車速を超えることなく前記車両が前進方向及び後進方向のうち予め設定された方向に走行している微速走行状態において、転舵要求を受信した場合、転舵輪のキャスタ角が減少するように、前記駆動力付与装置、又は前記駆動力付与装置及び前記制動力付与装置を制御するキャスタ角変更制御を実行するように構成され、
前記制御装置は、前記キャスタ角変更制御において、加減速に関する要求に応じた前記停車状態又は前記微速走行状態となるように、前記前輪及び前記後輪のうちの一方輪に対して他方輪に向かう方向の駆動力を付与し、前記他方輪に対して制動力又は前記一方輪に向かう方向の駆動力を付与する、
車両制御システム。 - 前記駆動力付与装置は、前記後輪に駆動力を付与可能に構成され、
前記微速走行状態は、前記停車状態を起算点として車速が前記所定車速を超えることなく前記車両が前進している状態であり、
前記制御装置は、前記停車状態又は前記微速走行状態において、前記転舵要求を受信した場合、前記キャスタ角変更制御として、前記前輪に制動力を付与し、且つ前記後輪に前進方向の駆動力を付与する、
請求項1に記載の車両制御システム。 - 前記駆動力付与装置は、前記前輪に駆動力を付与可能に構成され、
前記微速走行状態は、前記停車状態を起算点として車速が前記所定車速を超えることなく前記車両が後進している状態であり、
前記制御装置は、前記停車状態又は前記微速走行状態において、前記転舵要求を受信した場合、前記キャスタ角変更制御として、前記前輪に後進方向の駆動力を付与し、且つ前記後輪に制動力を付与する、
請求項1に記載の車両制御システム。 - 前記駆動力付与装置は、前記前輪及び前記後輪に駆動力を付与可能に構成され、
前記制御装置は、前記停車状態又は前記微速走行状態において、前記転舵要求を受信した場合、前記キャスタ角変更制御として、前記前輪に後進方向の駆動力を付与し、且つ前記後輪に前進方向の駆動力を付与する、
請求項1に記載の車両制御システム。 - ステアバイワイヤ型のステアリングシステムを備える、
請求項1~4の何れか一項に記載の車両制御システム。 - 前記転舵輪に対して設けられ、キャンバ角を調整するキャンバ角調整機構と、
前記キャンバ角調整機構を作動させる駆動源と、
をさらに備え、
前記制御装置は、車速に応じて、前記駆動源を制御し前記キャンバ角を調整する、
請求項1~5の何れか一項に記載の車両制御システム。 - 前記制御装置は、前記キャスタ角変更制御の実行に応じて、前記駆動源を制御して前記キャンバ角を大きくする、
請求項6に記載の車両制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021107035A JP7589652B2 (ja) | 2021-06-28 | 2021-06-28 | 車両制御システム |
| US17/843,312 US12030482B2 (en) | 2021-06-28 | 2022-06-17 | Vehicle control system |
| CN202210697298.0A CN115593413A (zh) | 2021-06-28 | 2022-06-20 | 车辆控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021107035A JP7589652B2 (ja) | 2021-06-28 | 2021-06-28 | 車両制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023005246A JP2023005246A (ja) | 2023-01-18 |
| JP7589652B2 true JP7589652B2 (ja) | 2024-11-26 |
Family
ID=84543703
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021107035A Active JP7589652B2 (ja) | 2021-06-28 | 2021-06-28 | 車両制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12030482B2 (ja) |
| JP (1) | JP7589652B2 (ja) |
| CN (1) | CN115593413A (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019212618A1 (de) * | 2019-08-22 | 2021-02-25 | Thyssenkrupp Ag | Kraftfahrzeugservolenkung |
| FR3112727B1 (fr) * | 2020-07-21 | 2022-07-22 | France Reducteurs | Dispositif de transmission et engin roulant équipé d’un tel dispositif de transmission |
| JP7629368B2 (ja) * | 2021-07-15 | 2025-02-13 | 株式会社マキタ | 運搬車 |
| CN116238276B (zh) | 2023-03-15 | 2024-08-13 | 艾德斯汽车电机无锡有限公司 | 一种装有轮毂电机汽车的摆臂总成布置结构 |
| BE1032089B9 (de) * | 2023-10-25 | 2025-06-05 | Thyssenkrupp Presta Ag | Verfahren zum Lenken eines Kraftfahrzeugs und Steer-by-Wire-Lenksystem für ein Kraftfahrzeug |
| US12485966B1 (en) * | 2025-05-30 | 2025-12-02 | Gm Global Technology Operations, Llc | Active camber control |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009143310A (ja) | 2007-12-12 | 2009-07-02 | Toyota Motor Corp | 車両用走行制御装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2949986B2 (ja) * | 1991-12-27 | 1999-09-20 | 三菱自動車工業株式会社 | 自動車用キャスタ角制御装置 |
| JP2007290507A (ja) * | 2006-04-24 | 2007-11-08 | Fuji Heavy Ind Ltd | 車両の操舵制御装置 |
| JP2009035081A (ja) | 2007-07-31 | 2009-02-19 | Equos Research Co Ltd | 制御装置 |
| ATE538018T1 (de) * | 2007-11-26 | 2012-01-15 | Honda Motor Co Ltd | Fahrzeug mit hinterradlenkung |
| JP5086943B2 (ja) * | 2008-09-02 | 2012-11-28 | 本田技研工業株式会社 | 車両用操舵装置 |
| JP6446828B2 (ja) * | 2014-05-15 | 2019-01-09 | 株式会社ジェイテクト | 車両の制御装置 |
| JP6969440B2 (ja) * | 2018-02-26 | 2021-11-24 | トヨタ自動車株式会社 | 車両の運転支援装置 |
| JP2020050133A (ja) * | 2018-09-27 | 2020-04-02 | 本田技研工業株式会社 | 四輪操舵車両 |
-
2021
- 2021-06-28 JP JP2021107035A patent/JP7589652B2/ja active Active
-
2022
- 2022-06-17 US US17/843,312 patent/US12030482B2/en active Active
- 2022-06-20 CN CN202210697298.0A patent/CN115593413A/zh active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009143310A (ja) | 2007-12-12 | 2009-07-02 | Toyota Motor Corp | 車両用走行制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220410871A1 (en) | 2022-12-29 |
| US12030482B2 (en) | 2024-07-09 |
| CN115593413A (zh) | 2023-01-13 |
| JP2023005246A (ja) | 2023-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7589652B2 (ja) | 車両制御システム | |
| JP7100699B2 (ja) | 車両のステアリングシステムを制御する方法 | |
| US8781684B2 (en) | Steering and control systems for a three-wheeled vehicle | |
| US20100320706A1 (en) | Control device and vehicle | |
| US11518430B2 (en) | Wheel steering device | |
| JP2018135001A (ja) | 自動傾斜車両 | |
| CN107600171B (zh) | 轮边/轮毂驱动多轴车辆的转向方法 | |
| RU2749924C1 (ru) | Система рулевого управления транспортного средства | |
| JP2021169248A (ja) | 車両用ステアリングシステム | |
| US11993252B2 (en) | Vehicle control apparatus | |
| JP4412476B2 (ja) | 四輪独立制駆動車輌の走行制御装置 | |
| EP4200193B1 (en) | A method for controlling steering of a vehicle arrangement | |
| JP2009227203A (ja) | キャンバー角調整装置 | |
| JP2024017956A (ja) | 車両制御装置 | |
| US12134432B2 (en) | Steering system | |
| US20250196918A1 (en) | Vehicle control device | |
| US12509060B2 (en) | Turning behavior control device for vehicle | |
| JP7669957B2 (ja) | ステアリングシステム | |
| CN114274947B (zh) | 一种车辆行驶稳定性智能控制装置、方法和汽车 | |
| JP2021091354A (ja) | 転舵装置 | |
| US20250100617A1 (en) | Vehicle steering system | |
| WO2017072732A1 (en) | Power steering control system | |
| WO2025220322A1 (ja) | 車両制御装置、及び、車両制御方法 | |
| JPH02299985A (ja) | 車両の後輪操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240125 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241010 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241015 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241028 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7589652 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |