JP7581322B2 - 人間による床レベルのタスク実行を容易にする下半身支持システム - Google Patents
人間による床レベルのタスク実行を容易にする下半身支持システム Download PDFInfo
- Publication number
- JP7581322B2 JP7581322B2 JP2022505400A JP2022505400A JP7581322B2 JP 7581322 B2 JP7581322 B2 JP 7581322B2 JP 2022505400 A JP2022505400 A JP 2022505400A JP 2022505400 A JP2022505400 A JP 2022505400A JP 7581322 B2 JP7581322 B2 JP 7581322B2
- Authority
- JP
- Japan
- Prior art keywords
- body support
- support structure
- assembly
- lower body
- coupled
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C9/00—Stools for specified purposes
- A47C9/02—Office stools; Workshop stools
- A47C9/027—Stools for work at ground level
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45B—WALKING STICKS; UMBRELLAS; LADIES' OR LIKE FANS
- A45B5/00—Walking sticks or umbrellas convertible into seats; Hunting sticks
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C9/00—Stools for specified purposes
- A47C9/10—Camp, travelling, or sports stools
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1253—Driving means driven by a human being, e.g. hand driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
- A61H2201/1633—Seat
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
- A61H2201/1652—Harness
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2203/00—Additional characteristics concerning the patient
- A61H2203/04—Position of the patient
- A61H2203/0418—Squatting, i.e. sitting on the heels
Landscapes
- Health & Medical Sciences (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
- Special Chairs (AREA)
Description
本願は、2020年7月24日に出願された“Lower Body Support System To Facilitate Floor Level Task Execution By Humans”と題された米国特許出願第16/938,839号に対する優先権を主張し、この米国特許出願第16/938,839号は、2019年7月26日に出願された“Support Gear For Floor Level Tasks”と題された米国仮特許出願第62/879,247号から米国特許法第119条に基づき優先権を主張しており、どちらも、その全体を参照により本明細書に援用する。
Claims (9)
- ユーザの下部胴体の周囲に巻き付けられるハーネスと、
前記ハーネスに取り付けられて前記ユーザの両側に配置される支持プレート要素と、
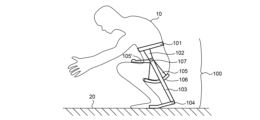
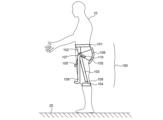
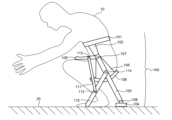
前記支持プレート要素に固定され、前記ユーザの立位で作業環境の地面に接することなく下方へ延び、前記ユーザのしゃがみ位で前記地面に接する主要な身体支持構造体と、
前記支持プレート要素又は前記主要な身体支持構造体に回転ジョイントを中心として回転可能に結合されて前記ユーザの両側に配置される尻部支持フレームと、
各々の前記尻部支持フレームに結合されて前記ユーザの尻部を支持する尻部支持構造体と、を備え、
各々の前記尻部支持フレームは、前記回転ジョイントから離れるように延びて前記ユーザの大腿上部に取り付けられるレバーアーム部分を含む、
下半身支持システム。 - 前記回転ジョイントを中心に回転可能に前記支持プレート要素に結合され、前記ユーザの立位で前記地面に接することなく下方へ延び、前記ユーザのしゃがみ位で前記主要な身体構造体よりも前記ユーザの前方側で前記地面に接する補助の身体支持構造体をさらに備え、
前記補助の身体支持構造は、前記ユーザの立位で前記主要な身体支持構造体よりも前記ユーザの後方側へ延びるメカニカルストップを有し、
前記メカニカルストップは、前記ユーザのしゃがみ位で前記主要な身体支持構造体に接触して前記回転ジョイントを中心とする前記ユーザの前方側への前記補助の身体支持構造体の回転を規制する、
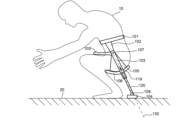
請求項1に記載の下半身支持システム。 - 前記主要な身体支持構造体に設けられた第2の回転ジョイントと、
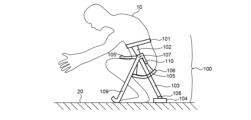
前記第2の回転ジョイントを中心に回転可能に前記主要な身体支持構造体に結合され、前記ユーザの立位で前記地面に接することなく下方へ延びる補助の身体支持構造体と、
前記補助の身体支持構造体に設けられた第3の回転ジョイントと、
前記レバーアーム部分に設けられた第4の回転ジョイントと、
前記第3の回転ジョイントを中心に回転可能に前記補助の身体支持構造体に結合されるとともに、前記第4の回転ジョイントを中心に回転可能に前記レバーアーム部分に結合される展開リンクと、をさらに備え、
前記展開リンクは、前記ユーザが立位からしゃがみ位まで動くに従い、前記回転ジョイントを中心として回転する前記レバーアーム部分に連動して前記補助の身体支持構造体を前記ユーザの前方側に展開させて前記地面に接触させる、
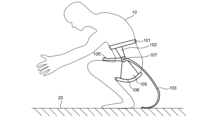
請求項1に記載の下半身支持システム。 - 前記主要な身体支持構造体は、前記ユーザのしゃがみ位で前記地面に接触して曲がることで前記地面との間に接触領域を形成する弾性材料により構成されている、
請求項1に記載の下半身支持システム。 - 前記主要な身体支持構造体の下端部に設けられた第2の回転ジョイントと、
前記第2の回転ジョイントを中心とした回転に対する復元力が発生するように前記主要な支持構造体に回転可能に結合され、前記ユーザの立位で前記地面に接することなく下方へ延び、前記ユーザのしゃがみ位で前記地面に接触して前記主要な身体支持構造体に対して回転することで前記地面との間に接触領域を形成する補助の身体支持構造体と、をさらに備える、
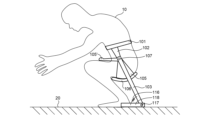
請求項1に記載の下半身支持システム。 - 前記主要な身体支持構造体の下端部に設けられた直線ジョイントと、
前記直線ジョイントにおいて前記主要な身体支持構造体に結合され、前記ユーザの立位で前記地面に接することなく下方へ延び、前記ユーザのしゃがみ位で前記地面に接触して前記主要な身体支持構造体に対して並進する補助の身体支持構造体と、
前記直線ジョイントに沿った前記主要な身体支持構造体に対する前記補助の身体支持構造体の並進移動によって復元力を発生させる線形ばねと、をさらに備える、
請求項1に記載の下半身支持システム。 - 人間のユーザの胴体に取り外し可能に取り付けられるハーネスアセンブリと、
尻部支持構造体と、
第1の受動的下半身支持アセンブリ及び第2の受動的下半身支持アセンブリと、
を含む下半身支持システムであって、
前記第1の受動的下半身支持アセンブリ及び前記第2の受動的下半身支持アセンブリは各々、
前記ハーネスアセンブリに強固に結合された主要な身体支持構造体であり、作業環境の地面に向かって前記ハーネスアセンブリから下方に延びる主要な身体支持構造体、及び
前記尻部支持構造体に強固に結合され、且つ回転ジョイントにおいて前記ハーネスアセンブリ又は前記主要な身体支持構造体に結合された尻部支持フレームであり、前記回転ジョイントを中心として前記ハーネスアセンブリに対して回転可能な尻部支持フレーム、
を含み、
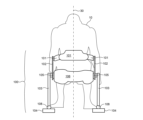
前記第1の受動的下半身支持アセンブリは、人間のユーザの胴体の第1の側で前記ハーネスアセンブリ及び前記尻部支持構造体に結合され、前記第2の受動的下半身支持アセンブリは、前記第1の側とは反対の人間のユーザの胴体の第2の側で前記ハーネスアセンブリ及び前記尻部支持構造体に結合されており、
前記第1の受動的下半身支持アセンブリ及び前記第2の受動的下半身支持アセンブリは各々、
前記主要な身体支持構造体に結合され、直線ジョイントに沿って前記主要な身体支持構造体に対して並進するように強制される補助の身体支持構造体、及び
前記主要な身体支持構造体及び前記補助の身体支持構造体に結合されたばねであって、前記主要な身体支持構造体と前記補助の身体支持構造体との間の力が、前記直線ジョイントに沿って前記主要な身体支持構造体に対して前記補助の身体支持構造体を相対的に変位させることによって誘発される、ばね、
をさらに含む、下半身支持システム。 - 人間のユーザの胴体に取り外し可能に取り付けられるハーネスアセンブリと、
尻部支持構造体と、
第1の受動的下半身支持アセンブリ及び第2の受動的下半身支持アセンブリと、
を含む下半身支持システムであって、
前記第1の受動的下半身支持アセンブリ及び前記第2の受動的下半身支持アセンブリは各々、
前記ハーネスアセンブリに強固に結合された主要な身体支持構造体であり、作業環境の地面に向かって前記ハーネスアセンブリから下方に延びる主要な身体支持構造体、及び
前記尻部支持構造体に強固に結合され、且つ回転ジョイントにおいて前記ハーネスアセンブリ又は前記主要な身体支持構造体に結合された尻部支持フレームであり、前記回転ジョイントを中心として前記ハーネスアセンブリに対して回転可能な尻部支持フレーム、
を含み、
前記第1の受動的下半身支持アセンブリは、人間のユーザの胴体の第1の側で前記ハーネスアセンブリ及び前記尻部支持構造体に結合され、前記第2の受動的下半身支持アセンブリは、前記第1の側とは反対の人間のユーザの胴体の第2の側で前記ハーネスアセンブリ及び前記尻部支持構造体に結合されており、
前記第1の受動的下半身支持アセンブリ及び前記第2の受動的下半身支持アセンブリは各々、
前記作業環境の地面に最も近い前記主要な身体支持構造体の端部において前記主要な身体支持構造体に結合されたエンドエフェクタ構造体をさらに含み、
前記エンドエフェクタ構造体は、前記主要な身体支持構造体に取り外し可能に結合され、エンドエフェクタアセンブリが、前記主要な身体支持構造体に取り外し可能に結合されるクイックチェンジカプラを含み、前記クイックチェンジカプラは、ツールなしで前記人間のユーザによって、前記主要な身体支持構造体に結合され、前記主要な身体支持構造体から分離される、下半身支持システム。 - 人間のユーザの胴体に取り外し可能に取り付けられるハーネスアセンブリと、
尻部支持構造体と、
第1の受動的下半身支持アセンブリ及び第2の受動的下半身支持アセンブリと、
を含む下半身支持システムであって、
前記第1の受動的下半身支持アセンブリ及び前記第2の受動的下半身支持アセンブリは各々、
前記ハーネスアセンブリに強固に結合された主要な身体支持構造体であり、作業環境の地面に向かって前記ハーネスアセンブリから下方に延びる主要な身体支持構造体、及び
前記尻部支持構造体に強固に結合され、且つ回転ジョイントにおいて前記ハーネスアセンブリ又は前記主要な身体支持構造体に結合された尻部支持フレームであり、前記回転ジョイントを中心として前記ハーネスアセンブリに対して回転可能な尻部支持フレーム、
を含み、
前記第1の受動的下半身支持アセンブリは、人間のユーザの胴体の第1の側で前記ハーネスアセンブリ及び前記尻部支持構造体に結合され、前記第2の受動的下半身支持アセンブリは、前記第1の側とは反対の人間のユーザの胴体の第2の側で前記ハーネスアセンブリ及び前記尻部支持構造体に結合されており、
前記第1の受動的下半身支持アセンブリ及び前記第2の受動的下半身支持アセンブリは各々、
第2の回転ジョイントにおいて前記主要な身体支持構造体に結合された補助の身体支持構造体であって、前記作業環境の地面に向かって前記主要な身体支持構造体から下方に延びる補助の身体支持構造体と、
第3の回転ジョイントにおいて前記補助の身体支持構造体、及び第4の回転ジョイントにおいて前記尻部支持フレームに結合されたリンク構造体と、
をさらに含む、下半身支持システム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201962879247P | 2019-07-26 | 2019-07-26 | |
| US62/879,247 | 2019-07-26 | ||
| PCT/US2020/043617 WO2021021679A1 (en) | 2019-07-26 | 2020-07-24 | Lower body support system to facilitate floor level task execution by humans |
| US16/938,839 | 2020-07-24 | ||
| US16/938,839 US11877670B2 (en) | 2019-07-26 | 2020-07-24 | Lower body support system to facilitate floor level task execution by humans |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022542169A JP2022542169A (ja) | 2022-09-29 |
| JP7581322B2 true JP7581322B2 (ja) | 2024-11-12 |
Family
ID=74188019
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022505400A Active JP7581322B2 (ja) | 2019-07-26 | 2020-07-24 | 人間による床レベルのタスク実行を容易にする下半身支持システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11877670B2 (ja) |
| JP (1) | JP7581322B2 (ja) |
| WO (1) | WO2021021679A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7853030B2 (ja) * | 2021-02-12 | 2026-04-28 | 住友重機械工業株式会社 | サポート装具 |
| FR3166044A1 (fr) * | 2024-09-12 | 2026-03-13 | Grtgaz | Support dorsal |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060102423A1 (en) | 2004-07-12 | 2006-05-18 | Lang Tracy H | Safety harnesses |
| JP2007276086A (ja) | 2006-04-11 | 2007-10-25 | Yaskawa Electric Corp | ロボットおよびロボットの制御方法 |
| US20110040216A1 (en) | 2005-03-31 | 2011-02-17 | Massachusetts Institute Of Technology | Exoskeletons for running and walking |
| JP2013208672A (ja) | 2012-03-30 | 2013-10-10 | Fujitsu Ltd | ロボットハンド、ロボット、及び取外方法 |
| JP2017100196A (ja) | 2015-11-30 | 2017-06-08 | セイコーエプソン株式会社 | ロボットおよび制御方法 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US406328A (en) * | 1889-07-02 | Peters | ||
| US671638A (en) * | 1900-07-24 | 1901-04-09 | Edwin Slagle | Stool and cane. |
| US690122A (en) * | 1901-07-18 | 1901-12-31 | Edwin Slagle | Combined stool and cane. |
| US1220316A (en) * | 1916-06-27 | 1917-03-27 | Edward Bragg | Milking-stool. |
| US1417250A (en) * | 1920-04-14 | 1922-05-23 | Kelly Robert Emmett | Back brace |
| US1709200A (en) * | 1928-01-17 | 1929-04-16 | Westbrook | Sanitary milking rest |
| US2099345A (en) * | 1937-01-06 | 1937-11-16 | Peter A Olszanowski | Body support or stool |
| US4095842A (en) * | 1977-04-27 | 1978-06-20 | Tredhill Manufacturing Co. Inc. | Seat for gardening and the like |
| US4138156A (en) * | 1977-09-06 | 1979-02-06 | Bonner Darcy R | Wearable chair |
| JP2002125789A (ja) | 2000-10-20 | 2002-05-08 | Haruo Miyamoto | 身体に装着可能な椅子 |
| US9616274B2 (en) * | 2005-03-01 | 2017-04-11 | Michael A. Wehrell | Swing training apparatus and method |
| US9561149B2 (en) * | 2008-01-07 | 2017-02-07 | Lite Run, Inc. | Suspension and body attachment system and differential pressure suit for body weight support devices |
| US7980625B2 (en) * | 2008-06-13 | 2011-07-19 | Christian Shane Worthington | Back jack |
| US20160135604A1 (en) * | 2013-07-04 | 2016-05-19 | Ofrees Co., Ltd. | Wearable chair apparatus |
| KR102146363B1 (ko) * | 2013-10-31 | 2020-08-20 | 삼성전자주식회사 | 착용형 로봇 및 그 제어 방법 |
| WO2015107577A1 (ja) * | 2014-01-15 | 2015-07-23 | パナソニック株式会社 | 下肢支援装具 |
| US20160331486A1 (en) * | 2014-01-15 | 2016-11-17 | Panasonic Corporation | Working posture holding device |
| JP2016034461A (ja) | 2014-08-01 | 2016-03-17 | 田中 佐知子 | 携帯用折り畳み式椅子 |
| EP3158893B1 (en) * | 2015-10-21 | 2021-04-28 | noonee AG | Seat unit for wearable sitting posture assisting device |
| US10213356B2 (en) * | 2015-12-10 | 2019-02-26 | Cadence Biomedical | Orthosis device |
| EP3241531A1 (en) * | 2016-05-04 | 2017-11-08 | noonee AG | Leg unit for a wearable sitting posture assisting device |
| JP6742196B2 (ja) * | 2016-08-24 | 2020-08-19 | Cyberdyne株式会社 | 生体活動検出装置および生体活動検出システム |
| ES2808778T3 (es) * | 2016-11-08 | 2021-03-01 | Noonee Ag | Dispositivo de ayuda para postura sentada que puede llevarse puesto |
| DE102018103300A1 (de) * | 2018-02-14 | 2019-08-14 | Noonee Ag | Tragbare Sitzhaltungshilfevorrichtung |
| KR102588952B1 (ko) * | 2018-11-02 | 2023-10-16 | 현대자동차주식회사 | 트러스 구조를 갖는 착용식 의자 |
| KR102603039B1 (ko) * | 2018-11-20 | 2023-11-16 | 현대자동차주식회사 | 4절 링크 구조를 포함한 착용식 의자 |
| KR102762504B1 (ko) * | 2018-12-27 | 2025-02-06 | 삼성전자주식회사 | 착용형 의자 |
| KR102681454B1 (ko) * | 2019-04-02 | 2024-07-04 | 현대자동차주식회사 | 착용식 의자의 착좌 지지 장치 |
| JP7389982B2 (ja) | 2019-05-28 | 2023-12-01 | 地方独立行政法人北海道立総合研究機構 | 体重支持装置 |
| US11826298B2 (en) * | 2019-10-16 | 2023-11-28 | Springactive, Inc. | Preloaded personal augmentation suit and method for assisted human motion |
| US11135123B2 (en) * | 2020-01-26 | 2021-10-05 | Dorian Hunter Alberti | Exoskeletal body support system |
-
2020
- 2020-07-24 JP JP2022505400A patent/JP7581322B2/ja active Active
- 2020-07-24 WO PCT/US2020/043617 patent/WO2021021679A1/en not_active Ceased
- 2020-07-24 US US16/938,839 patent/US11877670B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060102423A1 (en) | 2004-07-12 | 2006-05-18 | Lang Tracy H | Safety harnesses |
| US20110040216A1 (en) | 2005-03-31 | 2011-02-17 | Massachusetts Institute Of Technology | Exoskeletons for running and walking |
| JP2007276086A (ja) | 2006-04-11 | 2007-10-25 | Yaskawa Electric Corp | ロボットおよびロボットの制御方法 |
| JP2013208672A (ja) | 2012-03-30 | 2013-10-10 | Fujitsu Ltd | ロボットハンド、ロボット、及び取外方法 |
| JP2017100196A (ja) | 2015-11-30 | 2017-06-08 | セイコーエプソン株式会社 | ロボットおよび制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021021679A1 (en) | 2021-02-04 |
| US20210022513A1 (en) | 2021-01-28 |
| US11877670B2 (en) | 2024-01-23 |
| JP2022542169A (ja) | 2022-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6483081B2 (ja) | 外骨格のための非人間型股関節位置 | |
| JP7581322B2 (ja) | 人間による床レベルのタスク実行を容易にする下半身支持システム | |
| US9827162B1 (en) | Mobile body unweighted sit and stand chair assembly and method of operation | |
| WO2016021103A1 (ja) | 動作支援装置 | |
| US11613001B2 (en) | Leg augmentation systems and methods for use | |
| JPWO2018168112A1 (ja) | 介助装置 | |
| EP2055288B1 (en) | Walking assistance device | |
| WO2019198269A1 (ja) | 歩行補助装置 | |
| WO2001039633A1 (en) | Chair | |
| KR20090091206A (ko) | 전방 지지 장치 | |
| KR101690422B1 (ko) | 좌식 작업용 보조기구 | |
| CN112076058A (zh) | 座椅式按摩机以及按摩机 | |
| JP6550023B2 (ja) | 姿勢保持装置 | |
| JP2023552557A (ja) | 持ち上げおよび押圧のための臀部外骨格構造体 | |
| US20200306120A1 (en) | Tilting mobility scooter device | |
| JP5987598B2 (ja) | 身体保持具及び移乗支援装置 | |
| KR102493959B1 (ko) | 근골격계를 지지하는 보조기구 | |
| JP7366596B2 (ja) | マッサージ機 | |
| KR102493960B1 (ko) | 각도조절이 가능한 착용 기기 | |
| Verjans et al. | Modelling patient dynamics and controller impact analysis for a novel self-stabilizing patient transport aid | |
| KR20220143101A (ko) | 시중 장치 | |
| US20260053685A1 (en) | Assistance device equipped with handle and movement device using same | |
| KR20250033612A (ko) | 강아지용 휠체어 | |
| KR101454972B1 (ko) | 인체 착용형 의자 | |
| JP6616483B1 (ja) | アシスト装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20230612 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20230612 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230714 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240718 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241001 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241030 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7581322 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |