JP7570710B2 - エリア編集システム、作業エリアの編集方法 - Google Patents
エリア編集システム、作業エリアの編集方法 Download PDFInfo
- Publication number
- JP7570710B2 JP7570710B2 JP2022518495A JP2022518495A JP7570710B2 JP 7570710 B2 JP7570710 B2 JP 7570710B2 JP 2022518495 A JP2022518495 A JP 2022518495A JP 2022518495 A JP2022518495 A JP 2022518495A JP 7570710 B2 JP7570710 B2 JP 7570710B2
- Authority
- JP
- Japan
- Prior art keywords
- area
- unit
- work
- editing
- drone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
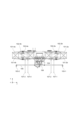
図6に本願発明に係るドローン100の飛行制御システムの全体概念図を示す。本図は模式図であって、縮尺は正確ではない。同図において、ドローン100、操作器401、基地局404およびサーバ405が移動体通信網400を介して互いに接続されている。これらの接続は、移動体通信網400に代えてWi-Fiによる無線通信を行ってもよいし、一部又は全部が有線接続されていてもよい。また、構成要素間において、移動体通信網400に代えて、又は加えて、直接接続する構成を有していてもよい。
ドローン100および基地局404は、GPS等のGNSSの測位衛星410と通信を行い、ドローン100および基地局404座標を取得する。ドローン100および基地局404が通信する測位衛星410は複数あってもよい。
操作器401は、使用者の操作によりドローン100に指令を送信し、また、ドローン100から受信した情報(たとえば、位置、散布物の貯留量、電池残量、カメラ映像等)を表示するための手段であり、コンピュータプログラムを稼働する一般的なタブレット端末等の携帯情報機器によって実現されてよい。操作器401は、ユーザインターフェース装置としての入力部および表示部を備える。本願発明に係るドローン100は自律飛行を行なうよう制御されるが、離陸や帰還などの基本操作時、および、緊急時にはマニュアル操作が行なえるようになっていてもよい。
圃場403は、ドローン100による散布の対象となる田圃や畑等である。実際には、圃場403の地形は複雑であり、事前に地形図が入手できない場合、あるいは、地形図と現場の状況が食い違っている場合がある。通常、圃場403は家屋、病院、学校、他の作物圃場、道路、鉄道等と隣接している。また、圃場403内に、建築物や電線等の侵入者が存在する場合もある。
基地局404は、RTK-GNSS基地局として機能し、ドローン100の正確な位置を提供できるようになっている。また、Wi-Fi通信の親機機能等を提供する装置であってもよい。Wi-Fi通信の親機機能とRTK-GNSS基地局が独立した装置であってもよい。また、基地局404は、3G、4G、およびLTE等の移動通信システムを用いて、サーバ405と互いに通信可能であってもよい。基地局404およびサーバ405は、営農クラウドを構成する。
サーバ405は、典型的にはクラウドサービス上で運営されているコンピュータ群と関連ソフトウェアであり、操作器401と携帯電話回線等で無線接続されていてもよい。サーバ405は、ハードウェア装置により構成されていてもよい。サーバ405は、ドローン100が撮影した圃場403の画像を分析し、作物の生育状況を把握して、飛行ルートを決定するための処理を行ってよい。また、保存していた圃場403の地形情報等をドローン100に提供してよい。加えて、ドローン100の飛行および撮影映像の履歴を蓄積し、様々な分析処理を行ってもよい。
図7に本願発明に係る散布用ドローンの実施例の制御機能を表したブロック図を示す。フライトコントローラー501は、ドローン全体の制御を司る構成要素であり、具体的にはCPU、メモリー、関連ソフトウェア等を含む組み込み型コンピュータであってよい。フライトコントローラー501は、操作器401から受信した入力情報、および、後述の各種センサーから得た入力情報に基づき、ESC(Electronic Speed Control)等の制御手段を介して、モーター102-1a、102-1b、102-2a、102-2b、102-3a、102-3b、104-a、104-bの回転数を制御することで、ドローン100の飛行を制御する。モーター102-1a、102-1b、102-2a、102-2b、102-3a、102-3b、104-a、104-bの実際の回転数はフライトコントローラー501にフィードバックされ、正常な回転が行なわれているかを監視できる構成になっている。あるいは、回転翼101に光学センサー等を設けて回転翼101の回転がフライトコントローラー501にフィードバックされる構成でもよい。
図8に示すエリア編集システム500は、測量機300により取得される座標に基づいて、ドローン100に作業させる圃場のエリアを定義するシステムである。エリア編集システム500は、例えば、圃場管理装置1、ドローン100、ユーザインターフェース装置200、基地局404、測量機300およびルート生成装置600が含まれる。定義されたエリアには、ルート生成装置600により、当該エリアごとに、ドローン100が自律的に飛行する飛行ルートの生成が行われる。また、圃場管理装置1は、ドローン100が進入できない障害物のエリアを定義する。飛行ルートは、障害物のエリアを避けて生成される。
測量機300は、RTK-GNSSの移動局の機能を有する装置であり、圃場の座標情報を測量することができる。測量機300は、使用者により保持して歩行することが可能な小型の装置であり、例えば棒状の装置である。測量機300は、下端を地面についた状態で、使用者が直立して上端部を保持できる程度の長さの、杖のような装置であってもよい。ある圃場の座標情報を読み取るために使用可能な測量機300の個数は、1個であっても複数であってもよい。複数の測量機300により1か所の圃場に関する座標情報を測量可能な構成によれば、複数の使用者がそれぞれ測量機300を保持して圃場を歩行することができるため、測量作業を短時間で完了することができる。
ルート生成装置600は、作業エリア内をドローン100が網羅的に飛行し、薬剤散布や撮影等を行うための、ドローン100の飛行ルートを生成する機能部である。ルート生成装置600は、測量機300による測量結果に基づいて得られた作業エリアおよび障害物の情報に基づいて、当該作業エリア内に飛行ルートを生成する。飛行ルートは、例えば作業エリア内を往復して走査するものであってもよいし、作業エリアの略中央から外側に向かって周回するルート、又は作業エリアの外側から略中央に向かって周回するルートであってもよい。また、飛行ルートは、周回と往復とを組み合わせて飛行するルートであってもよい。
圃場管理装置1は、情報処理を実行するためのCPU(Central Processing Unit)などの演算装置、RAM(Random Access Memory)やROM(Read Only Memory)などの記憶装置を備え、これによりソフトウェア資源として少なくとも、座標取得部11、座標点選択部12、エリア定義部13、エリア出力部14およびエリア編集部20を有する。
図19に示すように、まず、併合するエリアの選択を受け付けると(S1)、選択されたエリアが併合の条件を満たすか判定する(S2)。併合の条件を満たさない場合、エラーが通知される(S3)。ステップS2において併合の条件を満たすとき、選択された複数のエリアは併合されて登録され(S4)、併合されたエリアに対する飛行ルートが生成される(S5)。
図20に示すように、まず、縮小する地点の情報を受け付けると(S11)、選択された各地点が縮小エリアの端点としての条件を満たすか判定する(S12)。併合の条件を満たさない場合、エラーが通知される(S13)。ステップS2において縮小の条件を満たすとき、選択されたエリアは縮小エリアとして登録され(S14)、縮小エリアに対する飛行ルートが生成される(S15)。
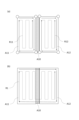
図11を用いてエリア定義画面の第2例について、第1例とは異なる部分を中心に説明する。同図に示すように、座標取得部11により取得される座標点P1乃至P6は、ユーザインターフェース装置200に表示されるエリア定義画面G1上に、圃場の地図又は写真に重ね合わされて表示される。このとき、各座標点P1乃至P6の識別番号が各座標点上に併せて表示される。各座標点P1乃至P6の識別番号は、順に「1」「2」「3」「7」「6」「8」である。識別番号は、例えば座標点の座標が取得された順に付与されているが、各座標点固有の番号であればこれに限られない。エリア定義画面G1の右部には測量地点一覧ウィンドウG11が表示される。測量地点一覧ウィンドウG11には、各座標点の識別番号及び座標点の測量日時が、測量機300により取得された順に、一覧表示される。
本願発明によれば、圃場の測量作業を効率化することができる。
Claims (6)
- 測量により取得又はユーザに入力された座標点の情報に基づいて定義され、ドローンを飛行させる作業エリア、又はドローンの飛行を禁止する飛行禁止エリアを編集するシステムであって、
複数の前記座標点を互いに接続することで作業エリア又は飛行禁止エリアを区画し、前記作業エリア又は前記飛行禁止エリアを定義するエリア定義部と、
前記エリア定義部で定義される作業エリア又は飛行禁止エリアを編集する入力を、ユーザインターフェース装置を介して受け付け、当該入力された指令が所定の条件を満たすことを条件に当該編集を許可するエリア編集部と、
前記ドローンが前記作業エリアを飛行する飛行ルートを生成するルート生成部と、
を備え、
前記エリア編集部は、前記エリア定義部で定義される複数の前記作業エリアを併合するエリア併合部を有し、
前記エリア併合部は、
前記ユーザインターフェース装置に入力される、前記複数の作業エリアの情報を取得する併合エリア取得部と、
前記複数の作業エリアの間の距離が所定値未満の場合に併合を許可し、当該距離が所定値以上の場合に併合を禁止する併合判定部と、
併合が許可された前記複数の作業エリアを単一の作業エリアとして登録する併合エリア登録部と、
を備え、
前記併合エリア登録部は、併合した複数の作業エリアの間の領域を、前記ドローンの飛行は許可するが、薬剤散布又は撮影は禁止する領域として定義し、
前記ルート生成部は、併合された前記作業エリアを飛行する飛行ルートとして、各作業エリアに対して生成された飛行ルートを互いに接続したルートとは少なくとも一部が異なり、前記併合エリア登録部による定義に基づいたルートを生成する、
エリア編集システム。
- 前記エリア編集部は、前記作業エリアを定義する複数の前記座標点の少なくとも一つを修正する座標点修正部を有し、
前記座標点修正部は、
複数の前記座標点の少なくとも一つについての修正座標情報を、前記ユーザインターフェース装置を介して取得する修正座標点取得部と、
前記修正座標情報の座標に応じて前記座標点の修正を許可するか否かを判定する座標点修正判定部と、
を更に備える、
請求項1に記載のエリア編集システム。
- 前記座標点修正判定部は、取得した前記修正座標情報の座標が、前記作業エリアの端点又は境界線上又は内側であるとき、前記座標点の修正を許可する、
請求項2記載のエリア編集システム。
- 前記エリア編集部は、前記飛行禁止エリアを編集する場合、編集後の前記飛行禁止エリアが編集前の飛行禁止エリアの全領域を含むときに、前記飛行禁止エリアの編集を許可する、
請求項1乃至3のいずれかに記載のエリア編集システム。
- 前記エリア編集部により定義された前記作業エリアを、前記ユーザインターフェース装置に出力する、
請求項1乃至4のいずれかに記載のエリア編集システム。
- 測量により取得又はユーザに入力された座標点の情報に基づいて定義され、ドローンを飛行させる作業エリア、又はドローンの飛行を禁止する飛行禁止エリアを編集する方法であって、
コンピュータが、
複数の前記座標点を互いに接続することで作業エリア又は飛行禁止エリアを区画し、前記作業エリア又は前記飛行禁止エリアを定義するエリア定義ステップと、
前記エリア定義ステップで定義される作業エリア又は飛行禁止エリアを編集する入力を、ユーザインターフェース装置を介して受け付け、当該入力された指令が所定の条件を満たすことを条件に当該編集を許可するエリア編集ステップと、
前記ドローンが前記作業エリアを飛行する飛行ルートを生成するルート生成ステップと、
を実行し、
前記エリア編集ステップでは、前記エリア定義ステップで定義される複数の前記作業エリアを併合するエリア併合ステップを実行し、
前記エリア併合ステップでは、
前記ユーザインターフェース装置に入力される、前記複数の作業エリアの情報を取得する併合エリア取得ステップと、
前記複数の作業エリアの間の距離が所定値未満の場合に併合を許可し、当該距離が所定値以上の場合に併合を禁止する併合判定ステップと、
併合が許可された前記複数の作業エリアを単一の作業エリアとして登録する併合エリア登録ステップと、
を実行し、
前記併合エリア登録ステップでは、併合した複数の作業エリアの間の領域を、前記ドローンの飛行は許可するが、薬剤散布又は撮影は禁止する領域として定義し、
前記ルート生成ステップでは、併合された前記作業エリアを飛行する飛行ルートとして、各作業エリアに対して生成された飛行ルートを互いに接続したルートとは少なくとも一部が異なり、前記併合エリア登録ステップによる定義に基づいたルートを生成する、
作業エリアの編集方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/018140 WO2021220409A1 (ja) | 2020-04-28 | 2020-04-28 | エリア編集システム、ユーザインターフェース装置および作業エリアの編集方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2021220409A1 JPWO2021220409A1 (ja) | 2021-11-04 |
| JPWO2021220409A5 JPWO2021220409A5 (ja) | 2023-03-24 |
| JP7570710B2 true JP7570710B2 (ja) | 2024-10-22 |
Family
ID=78332337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022518495A Active JP7570710B2 (ja) | 2020-04-28 | 2020-04-28 | エリア編集システム、作業エリアの編集方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7570710B2 (ja) |
| WO (1) | WO2021220409A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025141774A1 (ja) * | 2023-12-27 | 2025-07-03 | 株式会社クボタ | 飛行体管理システム及び飛行体 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011086312A (ja) | 1999-10-07 | 2011-04-28 | Honeywell Internatl Inc | ビークルのルートを計画するシステム |
| WO2018020659A1 (ja) | 2016-07-29 | 2018-02-01 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッド | 移動体、移動体制御方法、移動体制御システム、及び移動体制御プログラム |
| JP2019159558A (ja) | 2018-03-09 | 2019-09-19 | ヤンマー株式会社 | 圃場管理システム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105247593B (zh) * | 2014-04-17 | 2017-04-19 | 深圳市大疆创新科技有限公司 | 飞行禁区的飞行控制 |
| CN106054917A (zh) * | 2016-05-27 | 2016-10-26 | 广州极飞电子科技有限公司 | 一种无人飞行器的飞行控制方法、装置和遥控器 |
| JP7351609B2 (ja) * | 2018-10-04 | 2023-09-27 | セコム株式会社 | 経路探索装置及びプログラム |
-
2020
- 2020-04-28 JP JP2022518495A patent/JP7570710B2/ja active Active
- 2020-04-28 WO PCT/JP2020/018140 patent/WO2021220409A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011086312A (ja) | 1999-10-07 | 2011-04-28 | Honeywell Internatl Inc | ビークルのルートを計画するシステム |
| WO2018020659A1 (ja) | 2016-07-29 | 2018-02-01 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッド | 移動体、移動体制御方法、移動体制御システム、及び移動体制御プログラム |
| JP2019159558A (ja) | 2018-03-09 | 2019-09-19 | ヤンマー株式会社 | 圃場管理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021220409A1 (ja) | 2021-11-04 |
| WO2021220409A1 (ja) | 2021-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7442876B2 (ja) | 測量システム、測量方法、および測量プログラム | |
| JP6982908B2 (ja) | 運転経路生成装置、運転経路生成方法、および運転経路生成プログラム、ならびにドローン | |
| JP7137258B2 (ja) | ドローンシステム、飛行管理装置およびドローン | |
| WO2020090589A1 (ja) | 運転経路生成システム、運転経路生成方法、および運転経路生成プログラム、ならびにドローン | |
| JP2022084735A (ja) | ドローン、ドローンの制御方法、および、ドローンの制御プログラム | |
| JP7412039B2 (ja) | 表示装置、コンピュータプログラム | |
| JP2022088441A (ja) | ドローン操縦機、および、操縦用プログラム | |
| JP7062314B2 (ja) | 運転経路生成システム、運転経路生成方法、運転経路生成プログラム、座標測量システム、およびドローン | |
| CN113678083B (zh) | 产业机械系统、管制装置、产业机械系统的控制方法以及计算机可读的记录介质 | |
| JP7008999B2 (ja) | 運転経路生成システム、運転経路生成方法、および運転経路生成プログラム、ならびにドローン | |
| JP7079547B1 (ja) | 圃場評価装置、圃場評価方法および圃場評価プログラム | |
| JP7412037B2 (ja) | ドローンシステム、操作器および作業エリアの定義方法 | |
| JP7570710B2 (ja) | エリア編集システム、作業エリアの編集方法 | |
| JP7011233B2 (ja) | 散布システムおよび散布管理装置 | |
| JP7411259B2 (ja) | 植物の病理診断システム、植物の病理診断方法、植物の病理診断装置、およびドローン | |
| JP7411280B2 (ja) | ドローンシステム、ドローンおよび障害物検知方法 | |
| JP7412038B2 (ja) | 再測量要否判定装置、測量システム、ドローンシステム、および再測量要否判定方法 | |
| JP7387195B2 (ja) | 圃場管理システム、圃場管理方法およびドローン | |
| WO2021199243A1 (ja) | 測位システム、ドローン、測量機、および測位方法 | |
| WO2021166101A1 (ja) | 操作器、および、ドローンの操作用プログラム | |
| JP2021082134A (ja) | ドローンシステム、ドローン、管制装置、ドローンシステムの制御方法、および、ドローンシステム制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20221027 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20221114 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20230112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230315 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240729 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240904 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241002 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7570710 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S303 | Written request for registration of pledge or change of pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316303 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S303 | Written request for registration of pledge or change of pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316303 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S303 | Written request for registration of pledge or change of pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316303 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S803 | Written request for registration of cancellation of provisional registration |
Free format text: JAPANESE INTERMEDIATE CODE: R316803 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S803 | Written request for registration of cancellation of provisional registration |
Free format text: JAPANESE INTERMEDIATE CODE: R316803 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |