JP7565331B2 - 学習装置及び医療用画像処理装置 - Google Patents
学習装置及び医療用画像処理装置 Download PDFInfo
- Publication number
- JP7565331B2 JP7565331B2 JP2022501828A JP2022501828A JP7565331B2 JP 7565331 B2 JP7565331 B2 JP 7565331B2 JP 2022501828 A JP2022501828 A JP 2022501828A JP 2022501828 A JP2022501828 A JP 2022501828A JP 7565331 B2 JP7565331 B2 JP 7565331B2
- Authority
- JP
- Japan
- Prior art keywords
- region
- image
- light
- peculiar
- teacher
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000096—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope using artificial intelligence
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000094—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope extracting biological structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/043—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances for fluorescence imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0638—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements providing two or more wavelengths
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0655—Control therefor
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Radiology & Medical Imaging (AREA)
- Optics & Photonics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Signal Processing (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Endoscopes (AREA)
- Investigating, Analyzing Materials By Fluorescence Or Luminescence (AREA)
Description
特許文献1に記載の硬性鏡システムでは、以下の第1,第2の撮像画像をそれぞれ取得し、当該第1,第2の撮像画像を対応する画素同士で重畳して重畳画像を生成している。
第1の撮像画像は、白色光である通常光が観察対象に照射され、当該観察対象で反射された通常光を撮像素子にて撮像した画像である。
第2の撮像画像は、インドシアニングリーン等の蛍光物質を励起させる励起光が観察対象に照射され、当該励起光によって励起された当該観察対象からの蛍光を高感度撮像素子にて撮像した画像である。
図1は、本実施の形態に係る学習システム1の構成を示す図である。
学習システム1は、近赤外励起光を観察対象に照射した際に蛍光が発せられる蛍光領域(特異領域)を推測するために用いる学習モデルを生成するシステムである。この学習システム1は、図1に示すように、教師画像生成装置2と、学習装置3とを備える。そして、これら教師画像生成装置2及び学習装置3は、ネットワークNE(図1)を介して有線または無線により通信を行う。
なお、図1では、教師画像生成装置2を1台のみ図示しているが、当該教師画像生成装置2の台数は、1台に限らず、複数台であっても構わない。
先ず、教師画像生成装置2の構成について説明する。
図2は、教師画像生成装置2の構成を示す図である。
教師画像生成装置2は、学習装置3での機械学習に用いられる教師画像を生成する装置である。この教師画像生成装置2は、図2に示すように、挿入部21と、光源装置22と、ライトガイド23と、カメラヘッド24と、第1の伝送ケーブル25と、表示装置26と、第2の伝送ケーブル27と、制御装置28と、第3の伝送ケーブル29とを備える。
第1の光源221は、第1の波長帯域の通常光を出射(発光)する。本実施の形態では、第1の光源221は、白色光を出射するLED(Light Emitting Diode)で構成されている。
第2の光源222は、第1の波長帯域とは異なる第2の波長帯域の励起光を出射(発光)する。本実施の形態では、近赤外の波長帯域の近赤外励起光を出射する半導体レーザで構成されている。当該近赤外励起光は、インドシアニングリーン等の蛍光物質を励起する励起光である。また、当該インドシアニングリーン等の蛍光物質は、当該近赤外励起光で励起すると、当該近赤外励起光の波長帯域の中心波長よりも長波長側に中心波長を有する蛍光を発する。なお、近赤外励起光の波長帯域と蛍光の波長帯域とは、一部が重なり合うように設定してもよく、あるいは、全く重なり合わないように設定しても構わない。
なお、本実施の形態では、光源装置22は、制御装置28とは別体で構成されているが、これに限らず、当該制御装置28内部に設けられた構成を採用しても構わない。
なお、カメラヘッド24の詳細な構成については、後述する「2-1.カメラヘッドの構成」において説明する。
なお、第1の伝送ケーブル25を介したカメラヘッド24から制御装置28への画像信号等の伝送は、当該画像信号等を光信号で伝送してもよく、あるいは、電気信号で伝送しても構わない。第1の伝送ケーブル25を介した制御装置28からカメラヘッド24への制御信号、同期信号、クロックの伝送も同様である。
第2の伝送ケーブル27は、一端が表示装置26に着脱自在に接続され、他端が制御装置28に着脱自在に接続される。そして、第2の伝送ケーブル27は、制御装置28にて処理された映像信号を表示装置26に伝送する。
なお、制御装置28の詳細な構成については、後述する「2-2.制御装置の構成」において説明する。
第3の伝送ケーブル29は、一端が光源装置22に着脱自在に接続され、他端が制御装置28に着脱自在に接続される。そして、第3の伝送ケーブル29は、制御装置28からの制御信号を光源装置22に伝送する。
次に、カメラヘッド24の構成について説明する。
図3は、カメラヘッド24及び制御装置28の構成を示す図である。
なお、図3では、説明の便宜上、制御装置28及びカメラヘッド24と第1の伝送ケーブル25との間のコネクタCN1,CN2、制御装置28及び表示装置26と第2の伝送ケーブル27との間のコネクタ、制御装置28及び光源装置22と第3の伝送ケーブル29との間のコネクタの図示を省略している。
カメラヘッド24は、図3に示すように、レンズユニット241と、撮像部242と、第1の通信部243とを備える。
撮像部242は、制御装置28による制御の下、生体内を撮像する。この撮像部242は、図3に示すように、励起光カットフィルタ242aと、撮像素子242bと、信号処理部242cとを備える。
すなわち、励起光カットフィルタ242aは、レンズユニット241から撮像素子242bに向かう第1の被写体像(通常光(白色光))を透過させる。一方、励起光カットフィルタ242aは、レンズユニット241から撮像素子242bに向かう近赤外励起光及び蛍光については、近赤外励起光をカット(除去)し、蛍光(第2の被写体像)を透過させる。
具体的に、カラーフィルタ242dは、Rの波長帯域の光を主に透過させるRフィルタ群と、Bの波長帯域の光を主に透過させるBフィルタ群と、Gの波長帯域の光を主に透過させる第1のGフィルタ群(Rフィルタ群と同一の列に配列)と、Gの波長帯域の光を主に透過させる第2のGフィルタ群(Bフィルタ群と同一の列に配列)とを有する。なお、以下では、説明の便宜上、第1,第2のGフィルタ群を纏めてGフィルタ群と記載する。
ここで、R,G,Bの各フィルタ群は、蛍光についても透過させる。そして、撮像素子242bは、R,G,Bの波長帯域の光のみならず、蛍光の波長帯域の光に対しても感度を有する。
信号処理部242cは、撮像素子242bにて生成された教師画像(アナログ信号)に対して信号処理を行って教師画像(RAW信号(デジタル信号))を出力する。
次に、制御装置28の構成について図3を参照しながら説明する。
制御装置28は、図3に示すように、第2の通信部281と、メモリ282と、画像生成部283と、制御部284と、入力部285と、出力部286と、記憶部287と、第3の通信部288とを備える。
メモリ282は、例えば、DRAM(Dynamic Random Access Memory)等で構成されている。このメモリ282は、カメラヘッド24(第1の通信部243)から順次、出力される教師画像を複数フレーム分、一時的に記憶可能とする。
当該第1の画像処理としては、例えば、オプティカルブラック減算処理、ホワイトバランス調整処理、デモザイク処理、色補正処理、ガンマ補正処理、RGB信号(第1の教師画像)を輝度信号及び色差信号(Y,CB/CR信号)に変換するYC処理等を例示することができる。
当該第2の画像処理としては、入力した第2の教師画像(RAW信号(デジタル信号))から輝度信号(Y信号)のみを生成する処理等を例示することができる。
なお、当該制御部284の機能の一部については、後述する「3.教師画像生成装置の動作」において説明する。
出力部286は、スピーカやプリンタ等を用いて構成され、各種情報を出力する。
記憶部287は、制御部284が実行するプログラムや、制御部284の処理に必要な情報等を記憶する。
第3の通信部288は、制御部284による制御の下、ネットワークNEを介して学習装置3との間で情報の送受信を行う。
次に、上述した教師画像生成装置2の動作について説明する。
図4は、教師画像生成装置2の動作を示すフローチャートである。図5及び図6は、教師画像生成装置2の動作を説明する図である。具体的に、図5は、第1の画像処理が実行された後の1フレームの第1の教師画像WLIを示す図である。図6は、第2の画像処理が実行された後の1フレームの第2の教師画像IRを示す図である。なお、図6に示した第2の教師画像IRは、グレースケールで表現されており、黒に近付くにしたがって撮像された蛍光の成分の強度(輝度値に相当)が高い(輝度値が高い)ものである。
ステップS1Eの後、第1,第2の画像処理部283b,283cは、以下に示す処理を実行する(ステップS1F)。
すなわち、第1の画像処理部283bは、メモリコントローラ283aによってメモリ282から順次、読み出された各第1の教師画像に対して順次、第1の画像処理を実行する。そして、第1の画像処理部283bは、例えば、図5に示した第1の教師画像WLIを出力する。一方、第2の画像処理部283cは、メモリコントローラ283aによってメモリ282から順次、読み出された各第2の教師画像に対して順次、第2の画像処理を実行する。そして、第2の画像処理部283cは、例えば、図6に示した第2の教師画像IRを出力する。なお、第1,第2の教師画像は、同一の撮像素子242bにて撮像された画像であるため、図5及び図6に示した第1,第2の教師画像WLI,IRを比較して分かるように、同一の画像サイズを有している。すなわち、第1,第2の教師画像において、同一の画素位置は、同一の被写体における同一の位置を撮像した画素となっている。
この後、制御部284は、ステップS1Aに戻る。
次に、学習装置3の構成について説明する。
図7は、学習装置3の構成を示す図である。
学習装置3は、例えば、サーバ装置であり、教師画像生成装置2にて生成された教師画像を用いて学習モデルを生成する部分である。この学習装置3は、図7に示すように、通信部31と、制御部32と、記憶部33とを備える。
制御部32は、例えば、CPUやFPGA等を用いて構成され、学習装置3全体の動作を制御する。この制御部32は、教師画像取得部321と、特異領域特定部322と、第1の特徴量抽出部323と、特異対応領域学習部324とを備える。
なお、教師画像取得部321、特異領域特定部322、第1の特徴量抽出部323、及び特異対応領域学習部324の機能については、後述する「4.学習装置の動作」において説明する。
記憶部33は、制御部32が実行するプログラム、制御部32の処理に必要な情報、及び当該処理によって生成された情報等を記憶する。
次に、上述した学習装置3の動作について説明する。
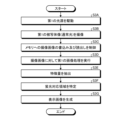
図8は、学習装置3の動作を示すフローチャートである。
先ず、教師画像取得部321は、通信部31を介して、教師画像生成装置2(第3の通信部288)から送信されてくる教師画像(第1,第2の教師画像)を順次、取得する(ステップS2A)。
具体的に、特異領域特定部322は、第2の教師画像において、画素レベルが特定の閾値以上となる領域を蛍光領域として特定する。
ここで、当該画素レベルとしては、Y信号(輝度信号)に応じた輝度値やRGB値(画素値)を例示することができる。本実施の形態では、当該画素レベルとして、当該輝度値を採用している。すなわち、図6に示した第2の教師画像IRでは、輝度値が特定の閾値以上となる領域Arが蛍光領域として特定される。さらに、本実施の形態では、特異領域特定部322は、蛍光領域Arとして、輝度値が第1の範囲内となる第1の蛍光領域(第1の特異領域)Ar1(図6に示したグレーの部分)と、輝度値が当該第1の範囲よりも高い第2の範囲内となる第2の蛍光領域(第2の特異領域)Ar2(図6に示した黒の部分)とをそれぞれ特定する。
ここで、蛍光対応領域とは、第1の教師画像内において、第2の教師画像の蛍光領域に対応する画素位置(当該蛍光領域と同一画素位置)の領域である。そして、非対応領域は、第1の教師画像内において、蛍光対応領域以外の領域である。本実施の形態では、蛍光対応領域は、第1の教師画像内において、第2の教師画像の第1の蛍光領域Ar1に対応する画素位置の第1の蛍光対応領域と、第2の教師画像の第2の蛍光領域Ar2に対応する画素位置の第2の蛍光対応領域とで構成される。すなわち、第1の特徴量抽出部323は、第1,第2の蛍光対応領域と非対応領域との特徴量をそれぞれ抽出する。
(1)第1の蛍光対応領域を構成する画素毎に特徴量を抽出する。
(2)第1の蛍光対応領域を構成する複数の画素を1つのグループとして、当該グループ毎に特徴量を抽出する。
(3)第1の蛍光対応領域全体の特徴量を抽出する。
なお、第2の蛍光対応領域の特徴量、及び非対応領域の特徴量の抽出方法も上記同様である。
ここで、機械学習としては、畳み込みニューラルネットワークを用いた機械学習(深層学習)を例示することができる。すなわち、当該機械学習では、第1,第2の教師画像を一組とする教師画像の数が増えれば増えるほど、第1,第2の蛍光対応領域及び非対応領域を精度よく判別可能な学習モデルを生成することができる。
本実施の形態では、特異対応領域学習部324は、第1,第2の蛍光対応領域を機械学習して学習モデルを生成する際、青の色成分に関する特徴量の重みを他の赤及び緑の色成分に関する特徴量の重みよりも低くする。例えば、当該青の色成分に関する特徴量を当該機械学習には用いない。
そして、特異対応領域学習部324は、生成した学習モデルを記憶部33に記憶する。
次に、学習装置3にて生成された学習モデルを用いて蛍光領域を推測する医療用観察装置4について説明する。
図9は、医療用観察装置4の構成を示す図である。図10は、カメラヘッド44及び制御装置48の構成を示す図である。
医療用観察装置4は、図9または図10に示すように、教師画像生成装置2と略同様の構成を有する。なお、医療用観察装置4において、教師画像生成装置2と同一の構成には同一の符号を付している。
以下では、医療用観察装置4の各構成のうち、教師画像生成装置2とは異なる構成について主に説明する。
そして、光源装置42では、制御装置48による制御の下、第1の光源221が駆動し、通常光(白色光)のみを出射する。
なお、本実施の形態では、光源装置42は、制御装置48とは別体で構成されているが、これに限らず、当該制御装置48内部に設けられた構成を採用しても構わない。
そして、カメラヘッド44(撮像素子242b)は、制御装置48による制御の下、特定のフレーム周期で撮像を行う。以下では、第1の教師画像と区別するために、カメラヘッド44(撮像素子242b)により第1の被写体像(通常光)を撮像することで生成された画像を撮像画像と記載する。
画像生成部483は、制御部484による制御の下、カメラヘッド44(第1の通信部243)から順次、出力され、第2の通信部281にて受信した撮像画像(RAW信号(デジタル信号))を処理する。この画像生成部483は、図10に示すように、メモリコントローラ483aと、画像処理部483bと、第2の特徴量抽出部483cと、特異対応領域特定部483dと、表示制御部483eとを備える。
なお、メモリコントローラ483a、画像処理部483b、第2の特徴量抽出部483c、特異対応領域特定部483d、及び表示制御部483eの機能については、後述する「6.医療用観察装置の動作」において説明する。
なお、当該制御部484の機能の一部については、後述する「6.医療用観察装置の動作」において説明する。
次に、上述した医療用観察装置4の動作について説明する。
図11は、医療用観察装置4の動作を示すフローチャートである。図12は、医療用観察装置4の動作を説明する図である。具体的に、図12は、ステップS3Gにて生成される表示画像WLI´を示す図である。ここで、図12では、説明の便宜上、ステップS3Bにおいて図5に示した第1の教師画像WLIと同一の撮像画像が生成されたものとしている。
なお、以下で説明する医療用観察装置4の動作を実行する前に、制御部484は、第3の通信部288の動作を制御し、学習装置3から学習モデルを受信し、当該学習モデルを記憶部287に記憶しているものとする。
ステップS3Aの後、制御部484は、特定のフレーム周期で、撮像素子242bに第1の被写体像(通常光)を撮像させ、撮像画像を生成する(ステップS3B)。
ステップS3Bの後、メモリコントローラ483aは、メモリ282への撮像画像の書込み及び読出しを制御する(ステップS3C)。具体的に、メモリコントローラ483aは、カメラヘッド44(第1の通信部243)から順次、出力され、第2の通信部281にて受信した撮像画像をメモリ282に順次、書き込む。また、メモリコントローラ483aは、メモリ282から撮像画像を特定のタイミングで読み出すとともに、当該読み出した撮像画像を画像処理部483bに入力させる。
ステップS3Dの後、第2の特徴量抽出部483cは、当該ステップS3Dにて画像処理部483bから順次、出力される撮像画像について、当該撮像画像の領域毎の特徴量を抽出する(ステップS3E)。
ここで、特徴量としては、以下の(4),(5)の抽出方法を例示することができる。
(4)撮像画像を構成する画素毎に特徴量を抽出する。
(5)撮像画像を構成する複数の画素を1つのグループ(領域)として、当該グループ毎に特徴量を抽出する。
また、第2の特徴量抽出部483cが抽出する特徴量は、第1の特徴量抽出部323が抽出する特徴量と同一種類の特徴量である。
ステップS3Fの後、表示制御部483eは、撮像画像内において、当該ステップS3Fにて特定された第1,第2の蛍光対応領域を他の領域と識別して表示する表示画像を生成する(ステップS3G)。例えば、ステップS3Bにおいて図5に示した第1の教師画像WLIと同一の撮像画像が生成されたものと仮定した場合には、図12に示すように、撮像画像内において、第1,第2の蛍光対応領域Ar1´,Ar2´(蛍光対応領域Ar´)を他の領域と識別した表示画像WLI´が生成される。当該識別する方法としては、撮像画像内において、蛍光対応領域Ar´に単色の色(例えば緑色等)を付す等を例示することができる。また、第2の蛍光領域Ar2は、上述したように、第1の蛍光領域Ar1よりも輝度値が高い領域である。このため、第2の蛍光対応領域Ar2´(図12では説明の便宜上、黒で表現)を第1の蛍光対応領域Ar1´(図12では説明の便宜上、グレーで表現)よりも濃い色を付すことが好ましい。
そして、表示制御部483eは、表示画像WLI´に応じた映像信号を生成し、第2の伝送ケーブル27を介して、当該映像信号を表示装置26に出力する。これにより、表示装置26は、当該表示画像WLI´を表示する。
本実施の形態に係る学習装置3は、第1,第2の教師画像を一組とする教師画像を用い、第1の教師画像内における第2の教師画像内の蛍光領域に対応する画素位置の蛍光対応領域の特徴量に基づいて、当該蛍光対応領域を機械学習して学習モデルを生成する。
そして、本実施の形態に係る制御装置48は、生体内(観察対象)からの第1の被写体像(通常光)を撮像した撮像画像を取得し、当該撮像画像内の領域毎の特徴量に基づいて、上述した学習モデルを用いて当該撮像画像内における蛍光対応領域を特定する。
すなわち、学習モデルを用いることで蛍光領域を推測することができるため、生体内にインドシアニングリーン等の蛍光物質を投与する必要がない。したがって、利便性を向上させることができる。
また、医療用観察装置4において、生体内に近赤外励起光を照射する必要もないため、第2の光源222や励起光カットフィルタ242aを省略することができ、構成の簡素化及び小型化を図ることができる。
本実施の形態に係る学習装置3では、蛍光対応領域を機械学習して学習モデルを生成する際、青の色成分に関する特徴量の重みを他の色成分に関する特徴量の重みよりも低くする。例えば、当該青の色成分に関する特徴量を当該機械学習には用いない。このため、不要な特徴量を考慮せずに機械学習することができるため、処理負荷を軽減することができる。
ここまで、本開示を実施するための形態を説明してきたが、本開示は上述した実施の形態によってのみ限定されるべきものではない。
上述した実施の形態では、蛍光領域を輝度値の高さに応じて第1,第2の蛍光領域の2段階に分けていたが、これに限らず、蛍光領域を1つのみとしてもよく、あるいは、輝度値の高さに応じて3段階以上に分けても構わない。蛍光領域に対応する蛍光対応領域も同様である。
例えば、第2の波長帯域の光としては、所謂NBI(Narrow Band Imaging(狭帯域光観察))で用いる狭帯域光を採用しても構わない。この際、第1の波長帯域の光としては、通常光(白色光)でもよく、その他の光でも構わない。
当該光線力学診断では、例えば5-アミノレブリン酸(以下、5-ALAと記載)等の光感受性物質が用いられる。当該5-ALAは、元来、動植物の生体内に含まれる天然アミノ酸である。この5-ALAは、体内投与後に細胞内に取り込まれ、ミトコンドリア内でプロトポルフィリンに生合成される。そして、癌細胞では、当該プロトポルフィリンが過剰に集積する。また、当該癌細胞に過剰集積するプロトポルフィリンは、光活性を有する。このため、当該プロトポルフィリンは、励起光(例えば375nm~445nmの波長帯域の青色可視光)で励起すると、蛍光(例えば600nm~740nmの波長帯域の赤色蛍光)を発光する。このように、光感受性物質を用いて癌細胞を蛍光発光させる癌診断法を光線力学診断という。
そして、上述した実施の形態において、第2の波長帯域の光として、プロトポルフィリンを励起する励起光(例えば375nm~445nmの波長帯域の青色可視光)を採用しても構わない。この際、第1の波長帯域の光としては、通常光(白色光)でもよく、その他の光でも構わない。
上述した実施の形態において、カメラヘッド44の一部の構成や制御装置48の一部の構成を例えばコネクタCN1やコネクタCN2に設けても構わない。
(1)第1の波長帯域の光が照射された被検体からの光を撮像した第1の教師画像と、前記第1の波長帯域とは異なる第2の波長帯域の光が照射された前記被検体からの光を撮像した第2の教師画像とを一組とする教師画像を取得する教師画像取得部と、前記第2の教師画像内の特異領域を特定する特異領域特定部と、前記第1の教師画像内における前記特異領域に対応する画素位置の特異対応領域の特徴量を抽出する第1の特徴量抽出部と、前記特徴量に基づいて、前記特異対応領域を機械学習して学習モデルを生成する特異対応領域学習部とを備える学習装置。
(2)前記被検体は、前記第2の波長帯域の励起光が照射されることで蛍光を発する被検体であり、前記第2の教師画像は、前記励起光が照射された前記被検体からの前記蛍光を撮像した画像であり、前記特異領域特定部は、前記第2の教師画像において、前記蛍光の成分の強度が特定の閾値以上となる領域を前記特異領域として特定する前記(1)に記載の学習装置。
(3)前記特異領域特定部は、前記第2の教師画像において、画素レベルが特定の閾値以上となる領域を前記特異領域として特定する前記(1)または(2)に記載の学習装置。
(4)前記特異領域特定部は、前記特異領域として、画素レベルが第1の範囲内となる第1の特異領域と、画素レベルが前記第1の範囲よりも高い第2の範囲内となる第2の特異領域とをそれぞれ特定し、前記第1の特徴量抽出部は、前記第1の教師画像内における前記特異対応領域である前記第1の特異領域に対応する画素位置の第1の特異対応領域と、前記第1の教師画像内における前記特異対応領域である前記第2の特異領域に対応する画素位置の第2の特異対応領域との特徴量をそれぞれ抽出し、前記特異対応領域学習部は、前記特徴量に基づいて、前記第1の特異対応領域と前記第2の特異対応領域とをそれぞれ機械学習する前記(3)に記載の学習装置。
(5)前記特徴量は、色及び輝度の少なくとも一方に関する特徴量を含み、前記特異対応領域学習部は、前記特異対応領域を機械学習して学習モデルを生成する際、青の色成分に関する前記特徴量の重みを他の色成分に関する前記特徴量の重みよりも低くする前記(1)~(4)のいずれか一つに記載の学習装置。
(6)前記第1の波長帯域の光は、交互に繰り返される第1の期間と第2の期間とにおいて、前記第1の期間に発光した光であり、前記第2の波長帯域の光は、前記第2の期間に発光した光である前記(1)~(5)のいずれか一つに記載の学習装置。
(7)第1の波長帯域の光が照射された観察対象からの光を撮像した撮像画像を取得する撮像画像取得部と、前記撮像画像の領域毎の特徴量を抽出する第2の特徴量抽出部と、前記特徴量に基づいて、機械学習により構築された学習モデル用いて前記撮像画像内における特異対応領域を特定する特異対応領域特定部とを備え、前記学習モデルは、前記第1の波長帯域の光が照射された被検体からの光を撮像した第1の教師画像と、前記第1の波長帯域とは異なる第2の波長帯域の光が照射された前記被検体からの光を撮像した第2の教師画像とを一組とする教師画像を用い、前記第1の教師画像内における前記第2の教師画像内の特異領域に対応する画素位置の前記特異対応領域の特徴量に基づいて、前記特異対応領域を機械学習して生成された学習モデルである医療用画像処理装置。
(8)前記被検体は、前記第2の波長帯域の励起光が照射されることで蛍光を発する被検体であり、前記第2の教師画像は、前記励起光が照射された前記被検体からの前記蛍光を撮像した画像であり、前記特異領域は、前記第2の教師画像において、前記蛍光の成分の強度が特定の閾値以上となる領域である前記(7)に記載の医療用画像処理装置。
(9)前記特異領域は、前記第2の教師画像において、画素レベルが特定の閾値以上となる領域である前記(7)または(8)に記載の医療用画像処理装置。
(10)前記特異領域は、画素レベルが第1の範囲内となる第1の特異領域と、画素レベルが前記第1の範囲よりも高い第2の範囲内となる第2の特異領域とを含み、前記学習モデルは、前記第1の教師画像内における前記特異対応領域である前記第1の特異領域に対応する画素位置の第1の特異対応領域と、前記第1の教師画像内における前記特異対応領域である前記第2の特異領域に対応する画素位置の第2の特異対応領域との特徴量に基づいて、前記第1の特異対応領域と前記第2の特異対応領域とをそれぞれ機械学習して生成された学習モデルである前記(9)に記載の医療用画像処理装置。
(11)前記特徴量は、色及び輝度の少なくとも一方に関する特徴量を含み、前記学習モデルは、青の色成分に関する前記特徴量の重みを他の色成分に関する前記特徴量の重みを低くした状態で、前記特異対応領域を機械学習して生成された学習モデルである前記(7)~(10)のいずれか一つに記載の医療用画像処理装置。
(12)前記第1の波長帯域の光は、交互に繰り返される第1の期間と第2の期間とにおいて、前記第1の期間に発光した光であり、前記第2の波長帯域の光は、前記第2の期間に発光した光である前記(7)~(11)のいずれか一つに記載の医療用画像処理装置。
(13)前記撮像画像内において、前記特異対応領域を他の領域と識別して表示する表示画像を生成する表示制御部をさらに備える前記(7)~(12)のいずれか一つに記載の医療用画像処理装置。
2 教師画像生成装置
3 学習装置
4 医療用観察装置
21 挿入部
22,42 光源装置
23 ライトガイド
24,44 カメラヘッド
25 第1の伝送ケーブル
26 表示装置
27 第2の伝送ケーブル
28,48 制御装置
29 第3の伝送ケーブル
31 通信部
32 制御部
33 記憶部
211 接眼部
221 第1の光源
222 第2の光源
241 レンズユニット
242 撮像部
242a 励起光カットフィルタ
242b 撮像素子
242c 信号処理部
242d カラーフィルタ
243 第1の通信部
281 第2の通信部
282 メモリ
283 画像生成部
283a メモリコントローラ
283b 第1の画像処理部
283c 第2の画像処理部
283d 表示制御部
284,484 制御部
285 入力部
286 出力部
287 記憶部
288 第3の通信部
321 教師画像取得部
322 特異領域特定部
323 第1の特徴量抽出部
324 特異対応領域学習部
483 画像生成部
483a メモリコントローラ
483b 画像処理部
483c 第2の特徴量抽出部
483d 特異対応領域特定部
483e 表示制御部
Ar 蛍光領域
Ar´ 蛍光対応領域
Ar1 第1の蛍光領域
Ar1´ 第1の蛍光対応領域
Ar2 第2の蛍光領域
Ar2´ 第2の蛍光対応領域
CN1,CN2 コネクタ
IR 第2の教師画像
NE ネットワーク
WLI 第1の教師画像
WLI´ 表示画像
Claims (9)
- 第1の波長帯域の光が照射された被検体からの光を撮像した第1の教師画像と、前記第1の波長帯域とは異なる第2の波長帯域の光が照射された前記被検体からの光を撮像した第2の教師画像とを一組とする教師画像を取得する教師画像取得部と、
前記第2の教師画像内の特異領域を特定する特異領域特定部と、
前記第1の教師画像内における前記特異領域に対応する画素位置の特異対応領域の特徴量を抽出する第1の特徴量抽出部と、
前記特徴量に基づいて、前記特異対応領域を機械学習して学習モデルを生成する特異対応領域学習部とを備え、
前記特異領域特定部は、
前記第2の教師画像において、画素レベルが特定の閾値以上となる領域を前記特異領域として特定するとともに、前記特異領域として、画素レベルが第1の範囲内となる第1の特異領域と、画素レベルが前記第1の範囲よりも高い第2の範囲内となる第2の特異領域とをそれぞれ特定し、
前記第1の特徴量抽出部は、
前記第1の教師画像内における前記特異対応領域である前記第1の特異領域に対応する画素位置の第1の特異対応領域と、前記第1の教師画像内における前記特異対応領域である前記第2の特異領域に対応する画素位置の第2の特異対応領域との特徴量をそれぞれ抽出し、
前記特異対応領域学習部は、
前記特徴量に基づいて、前記第1の特異対応領域と前記第2の特異対応領域とをそれぞれ機械学習する学習装置。 - 前記被検体は、
前記第2の波長帯域の励起光が照射されることで蛍光を発する被検体であり、
前記第2の教師画像は、
前記励起光が照射された前記被検体からの前記蛍光を撮像した画像であり、
前記画素レベルは、
前記第2の教師画像における前記蛍光の成分の強度である請求項1に記載の学習装置。 - 第1の波長帯域の光が照射された被検体からの光を撮像した第1の教師画像と、前記第1の波長帯域とは異なる第2の波長帯域の光が照射された前記被検体からの光を撮像した第2の教師画像とを一組とする教師画像を取得する教師画像取得部と、
前記第2の教師画像内の特異領域を特定する特異領域特定部と、
前記第1の教師画像内における前記特異領域に対応する画素位置の特異対応領域の特徴量を抽出する第1の特徴量抽出部と、
前記特徴量に基づいて、前記特異対応領域を機械学習して学習モデルを生成する特異対応領域学習部とを備え、
前記特徴量は、
色及び輝度の少なくとも一方に関する特徴量を含み、
前記特異対応領域学習部は、
前記特異対応領域を機械学習して学習モデルを生成する際、青の色成分に関する前記特徴量の重みを他の色成分に関する前記特徴量の重みよりも低くする学習装置。 - 前記第1の波長帯域の光は、
交互に繰り返される第1の期間と第2の期間とにおいて、前記第1の期間に発光した光であり、
前記第2の波長帯域の光は、
前記第2の期間に発光した光である請求項1に記載の学習装置。 - 第1の波長帯域の光が照射された観察対象からの光を撮像した撮像画像を取得する撮像画像取得部と、
前記撮像画像の領域毎の特徴量を抽出する第2の特徴量抽出部と、
前記特徴量に基づいて、機械学習により構築された学習モデル用いて前記撮像画像内における特異対応領域を特定する特異対応領域特定部とを備え、
前記学習モデルは、
前記第1の波長帯域の光が照射された被検体からの光を撮像した第1の教師画像と、前記第1の波長帯域とは異なる第2の波長帯域の光が照射された前記被検体からの光を撮像した第2の教師画像とを一組とする教師画像を用い、前記第1の教師画像内における前記第2の教師画像内の特異領域に対応する画素位置の前記特異対応領域の特徴量に基づいて、前記特異対応領域を機械学習して生成された学習モデルであり、
前記特異領域は、
前記第2の教師画像において、画素レベルが特定の閾値以上となる領域であるとともに、画素レベルが第1の範囲内となる第1の特異領域と、画素レベルが前記第1の範囲よりも高い第2の範囲内となる第2の特異領域とを含み、
前記学習モデルは、
前記第1の教師画像内における前記特異対応領域である前記第1の特異領域に対応する画素位置の第1の特異対応領域と、前記第1の教師画像内における前記特異対応領域である前記第2の特異領域に対応する画素位置の第2の特異対応領域との特徴量に基づいて、前記第1の特異対応領域と前記第2の特異対応領域とをそれぞれ機械学習して生成された学習モデルである医療用画像処理装置。 - 前記被検体は、
前記第2の波長帯域の励起光が照射されることで蛍光を発する被検体であり、
前記第2の教師画像は、
前記励起光が照射された前記被検体からの前記蛍光を撮像した画像であり、
前記画素レベルは、
前記第2の教師画像における前記蛍光の成分の強度である請求項5に記載の医療用画像処理装置。 - 第1の波長帯域の光が照射された観察対象からの光を撮像した撮像画像を取得する撮像画像取得部と、
前記撮像画像の領域毎の特徴量を抽出する第2の特徴量抽出部と、
前記特徴量に基づいて、機械学習により構築された学習モデル用いて前記撮像画像内における特異対応領域を特定する特異対応領域特定部とを備え、
前記学習モデルは、
前記第1の波長帯域の光が照射された被検体からの光を撮像した第1の教師画像と、前記第1の波長帯域とは異なる第2の波長帯域の光が照射された前記被検体からの光を撮像した第2の教師画像とを一組とする教師画像を用い、前記第1の教師画像内における前記第2の教師画像内の特異領域に対応する画素位置の前記特異対応領域の特徴量に基づいて、前記特異対応領域を機械学習して生成された学習モデルであり、
前記特徴量は、
色及び輝度の少なくとも一方に関する特徴量を含み、
前記学習モデルは、
青の色成分に関する前記特徴量の重みを他の色成分に関する前記特徴量の重みを低くした状態で、前記特異対応領域を機械学習して生成された学習モデルである医療用画像処理装置。 - 前記第1の波長帯域の光は、
交互に繰り返される第1の期間と第2の期間とにおいて、前記第1の期間に発光した光であり、
前記第2の波長帯域の光は、
前記第2の期間に発光した光である請求項5に記載の医療用画像処理装置。 - 前記撮像画像内において、前記特異対応領域を他の領域と識別して表示する表示画像を生成する表示制御部をさらに備える請求項5に記載の医療用画像処理装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020024944 | 2020-02-18 | ||
| JP2020024944 | 2020-02-18 | ||
| PCT/JP2021/004847 WO2021166749A1 (ja) | 2020-02-18 | 2021-02-09 | 学習装置及び医療用画像処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021166749A1 JPWO2021166749A1 (ja) | 2021-08-26 |
| JP7565331B2 true JP7565331B2 (ja) | 2024-10-10 |
Family
ID=77391384
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022501828A Active JP7565331B2 (ja) | 2020-02-18 | 2021-02-09 | 学習装置及び医療用画像処理装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12213643B2 (ja) |
| EP (1) | EP4088642A4 (ja) |
| JP (1) | JP7565331B2 (ja) |
| CN (1) | CN115087386B (ja) |
| WO (1) | WO2021166749A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240079009A (ko) * | 2022-11-28 | 2024-06-04 | 현대자동차주식회사 | 액티브 러닝 장치 및 그 방법 |
| WO2025144715A1 (en) * | 2023-12-29 | 2025-07-03 | Ipg Photonics Corporation | Systems and methods for controlling laser treatments using reflected intensity signals |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020003991A1 (ja) | 2018-06-28 | 2020-01-02 | 富士フイルム株式会社 | 医療画像学習装置、方法及びプログラム |
| WO2020017213A1 (ja) | 2018-07-20 | 2020-01-23 | 富士フイルム株式会社 | 内視鏡画像認識装置、内視鏡画像学習装置、内視鏡画像学習方法及びプログラム |
| WO2020022027A1 (ja) | 2018-07-26 | 2020-01-30 | 富士フイルム株式会社 | 学習装置及び学習方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6533358B2 (ja) | 2013-08-06 | 2019-06-19 | 三菱電機エンジニアリング株式会社 | 撮像装置 |
| KR101463354B1 (ko) * | 2013-10-22 | 2014-11-18 | 영남대학교 산학협력단 | 초분광 영상의 특이영역 검출 장치 및 그 방법 |
| JP6339872B2 (ja) * | 2014-06-24 | 2018-06-06 | オリンパス株式会社 | 画像処理装置、内視鏡システム及び画像処理方法 |
| JP6505393B2 (ja) | 2014-08-21 | 2019-04-24 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用観察装置および医療用観察システム |
| JP6721994B2 (ja) * | 2015-04-30 | 2020-07-15 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用信号処理装置および医療用観察システム |
| EP3176751B1 (en) * | 2015-12-01 | 2020-12-30 | Ricoh Company, Ltd. | Information processing device, information processing method, computer-readable recording medium, and inspection system |
| TW201902411A (zh) | 2017-06-09 | 2019-01-16 | 多田智裕 | 藉由消化器官之內視鏡影像之疾病的診斷支援方法、診斷支援系統、診斷支援程式及記憶此診斷支援程式之電腦可讀取之記錄媒體 |
| JP7042907B2 (ja) * | 2018-05-28 | 2022-03-28 | 富士フイルム株式会社 | 学習データ収集装置、学習データ収集方法及びプログラム、学習システム、学習済みモデル、並びに内視鏡画像処理装置 |
| JP6971934B2 (ja) | 2018-08-10 | 2021-11-24 | 株式会社東芝 | 画像処理装置 |
| JP7038641B2 (ja) * | 2018-11-02 | 2022-03-18 | 富士フイルム株式会社 | 医療診断支援装置、内視鏡システム、及び作動方法 |
-
2021
- 2021-02-09 WO PCT/JP2021/004847 patent/WO2021166749A1/ja not_active Ceased
- 2021-02-09 EP EP21757983.8A patent/EP4088642A4/en active Pending
- 2021-02-09 US US17/798,570 patent/US12213643B2/en active Active
- 2021-02-09 JP JP2022501828A patent/JP7565331B2/ja active Active
- 2021-02-09 CN CN202180014096.5A patent/CN115087386B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020003991A1 (ja) | 2018-06-28 | 2020-01-02 | 富士フイルム株式会社 | 医療画像学習装置、方法及びプログラム |
| WO2020017213A1 (ja) | 2018-07-20 | 2020-01-23 | 富士フイルム株式会社 | 内視鏡画像認識装置、内視鏡画像学習装置、内視鏡画像学習方法及びプログラム |
| WO2020022027A1 (ja) | 2018-07-26 | 2020-01-30 | 富士フイルム株式会社 | 学習装置及び学習方法 |
Non-Patent Citations (1)
| Title |
|---|
| 太田雄大、外2名,テクスチャと色特徴を用いた機械学習による舌苔抽出,第36回日本医用画像工学会大会予稿集,2017年07月27日,p.332-335 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021166749A1 (ja) | 2021-08-26 |
| EP4088642A4 (en) | 2023-06-07 |
| JPWO2021166749A1 (ja) | 2021-08-26 |
| US20230112628A1 (en) | 2023-04-13 |
| CN115087386A (zh) | 2022-09-20 |
| EP4088642A1 (en) | 2022-11-16 |
| US12213643B2 (en) | 2025-02-04 |
| CN115087386B (zh) | 2025-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2992805B1 (en) | Electronic endoscope system | |
| WO2016129062A1 (ja) | 画像処理装置、内視鏡システム、撮像装置、画像処理方法およびプログラム | |
| US20240306883A1 (en) | Medical image processing apparatus and medical observation system | |
| JP7565331B2 (ja) | 学習装置及び医療用画像処理装置 | |
| US20100130819A1 (en) | Endoscope apparatus and its control method | |
| JP7551465B2 (ja) | 医療用画像処理装置及び医療用観察システム | |
| US11737646B2 (en) | Medical image processing device and medical observation system | |
| JP2025028292A (ja) | 医療用観察システム、医療用光源制御装置、及び医療用光源制御方法 | |
| US10863149B2 (en) | Image processing apparatus, image processing method, and computer readable recording medium | |
| JP2025028293A (ja) | 医療用制御装置、医療用制御方法、及び医療用観察システム | |
| US20250387053A1 (en) | Medical light source device and medical observation system | |
| US12295553B2 (en) | Medical image processing apparatus and medical observation system | |
| JP7224963B2 (ja) | 医療用制御装置及び医療用観察システム | |
| JP2021146198A (ja) | 医療用画像処理装置及び医療用観察システム | |
| JP5224390B2 (ja) | 内視鏡装置および内視鏡装置の作動方法 | |
| JP2021003347A (ja) | 医療用画像処理装置及び医療用観察システム | |
| JP2021132812A (ja) | 医療用画像処理装置及び医療用観察システム | |
| US10918269B2 (en) | Medical light source apparatus and medical observation system | |
| JP2023039245A (ja) | 画像処理装置、画像処理方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240816 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240930 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7565331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |