JP7556074B2 - 自動走行システム及び農作業機制御方法 - Google Patents
自動走行システム及び農作業機制御方法 Download PDFInfo
- Publication number
- JP7556074B2 JP7556074B2 JP2023025698A JP2023025698A JP7556074B2 JP 7556074 B2 JP7556074 B2 JP 7556074B2 JP 2023025698 A JP2023025698 A JP 2023025698A JP 2023025698 A JP2023025698 A JP 2023025698A JP 7556074 B2 JP7556074 B2 JP 7556074B2
- Authority
- JP
- Japan
- Prior art keywords
- rice transplanter
- path
- route
- travel
- automatic driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 39
- 230000008569 process Effects 0.000 claims description 9
- 241000209094 Oryza Species 0.000 description 149
- 235000007164 Oryza sativa Nutrition 0.000 description 149
- 235000009566 rice Nutrition 0.000 description 149
- 238000012544 monitoring process Methods 0.000 description 53
- 238000004891 communication Methods 0.000 description 28
- 238000010586 diagram Methods 0.000 description 20
- 238000013459 approach Methods 0.000 description 14
- 230000005540 biological transmission Effects 0.000 description 14
- 230000001133 acceleration Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 8
- 239000000446 fuel Substances 0.000 description 7
- 238000002347 injection Methods 0.000 description 6
- 239000007924 injection Substances 0.000 description 6
- 238000012790 confirmation Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 230000007704 transition Effects 0.000 description 4
- 241000196324 Embryophyta Species 0.000 description 3
- 238000012545 processing Methods 0.000 description 2
- 239000002828 fuel tank Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images


















Landscapes
- Guiding Agricultural Machines (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
図1は、本発明の一実施形態に係る自動走行システムが適用される田植機1の側面図である。図2は、田植機1の平面図である。
図1および図2を参照して、田植機1は、圃場F(図3A等も参照)内を走行しながら、圃場Fの地面に苗を植え付ける植付作業を行う。田植機1は、走行機体2と、走行機体2の後方に配置された植付部3とを備える。走行機体2は、左右一対の前輪5および左右一対の後輪6を備えており、エンジン10の駆動力によって走行可能である。
ステアリングハンドル8の近傍には、ユーザが各種操作を行うための操作部11(後述する図5参照)が設けられている。操作部11には、主変速レバー等が含まれる。主変速レバーは、田植機1が走行する速度(車速)を無段階で変更するための操作具である。
昇降リンク機構13は、トップリンク18およびロアリンク19からなる平行リンク構造により構成されている。ロアリンク19には、昇降シリンダ15が連結されている。昇降シリンダ15を伸縮動作させることによって、植付部3全体を昇降させることができる。
植付入力ケース20には、昇降リンク機構13が連結されており、複数の植付ユニット21が取り付けられている。
植付入力ケース20は、PTO軸14からの駆動力が入力されることによって、植付ユニット21を駆動する。植付伝動ケース24には、植付入力ケース20から動力が伝動される。回転ケース25は、植付伝動ケース24からの動力で回転駆動される。これにより、植付アーム26の先端部は、ループ状の回転軌跡を描いて作動する。植付アーム26の先端部は、上から下へ向かって動くときに、苗載台22に載せられた苗マット(図示せず)から苗を掻き取って、苗を圃場Fの地面に植え込む。
図3A、図3Bおよび図4は、田植機1が圃場F内を走行する様子を説明するための模式図である。圃場Fは、植付作業が行われる作業領域W(内部領域)と、作業領域Wを取り囲む枕地領域Nと、枕地領域Nを取り囲む畦FPとを有する。作業領域Wは、たとえば、平面視で矩形状である。圃場Fには、図3Aに示す第1走行経路R1、および、図4に示す第2走行経路R2のいずれかが設定される。以下では、第1走行経路R1および第2走行経路R2をまとめて走行経路Rということがある。
図3Aに示す第1走行経路R1では、第1連結経路C1の前進経路E1が畦際まで延びるため、図4に示す第2走行経路R2よりも長い直線経路Pを設定することができる。したがって、圃場Fに第1走行経路R1を設定した場合には、圃場Fに第2走行経路R2を設定する場合と比較して、作業領域Wを広く設定することができる。
図5に示すように、田植機1は、走行機体2の動作(前進、後進、停止および旋回等)、および、走行機体2に装着された植付部3の動作(昇降、駆動および停止等)を制御するための制御部4を備える。制御部4には、田植機1の各部を制御するための複数のコントローラがそれぞれ電気的に接続されている。
エンジンコントローラ31は、エンジン10の回転数等を制御するものである。エンジンコントローラ31は、エンジン10に設けられる燃料噴射装置としてのコモンレール装置41と電気的に接続されている。コモンレール装置41は、エンジン10の各気筒に燃料を噴射するものである。この場合、エンジン10の各気筒に対するインジェクタの燃料噴射バルブが開閉制御されることによって、燃料供給ポンプによって燃料タンクからコモンレール装置41に圧送された高圧の燃料が各インジェクタからエンジン10の各気筒に噴射され、各インジェクタから供給される燃料の噴射圧力、噴射時期、噴射期間(噴射量)が高精度にコントロールされる。エンジンコントローラ31は、コモンレール装置41を制御することで、エンジン10の回転数等を制御する。エンジンコントローラ31は、コモンレール装置41を制御することで、エンジン10への燃料の供給を停止させ、エンジン10の駆動を停止させることもできる。
車速コントローラ32は、変速装置42の斜板の角度をアクチュエータ(図示せず)によって変更することで、トランスミッション27の変速比を変更する。これにより、所望の車速になるまで走行機体2を減速(加速)させたり、走行機体2を停止させたりできる。変速装置42の斜板の角度の変更速度を調整することによって、走行機体2の減速度合を調整することができる。走行機体2の減速度合を調整することによって、走行機体2が減速し始めてから停止するまでの距離を調整することができる。
制御部4には、慣性計測装置36が電気的に接続されている。慣性計測装置36は、田植機1の姿勢(走行機体2の向き)や加速度等を特定することが可能なセンサユニットである。具体的には、慣性計測装置36は、互いに直交する第1軸、第2軸、および第3軸のそれぞれに対して、角速度センサと加速度センサとを取り付けたセンサ群を備える。
自動走行制御部51は、各コントローラ31~35を制御することにより、現在設定されている走行経路に沿って田植機1を自動走行させたり、自動走行を一時停止させたり、自動走行を終了させたりする。
無線通信端末100は、制御部101を含む。制御部101は、CPUおよびメモリ(ROM、RAM等)を備えたマイクロコンピュータを含む。制御部101には、記憶部102、操作表示部103、無線通信部104および無線通信用アンテナ105が接続されている。操作表示部103は、各種データを表示したり、ユーザによる操作を受け付けたりするものである。操作表示部103は、たとえば、タッチパネル式ディプレイによって構成されている。記憶部102は、ハードディスク、不揮発性メモリ等の記憶デバイスから構成されている。
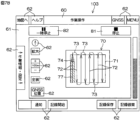
図6A~図6Hは、操作表示部103に表示される経路生成画面を示す図である。走行経路Rを生成するために、図6Aに示すトップ画面、図6Bに示す圃場選択画面、図6Cに示す圃場領域選択画面、図6Dに示す作業車両選択画面、図6Eに示す作業態様設定画面、図6Fに示す植付方法設定画面、図6Gに示す設定確認画面、および図6Hに示すパス生成結果画面がこの順番で表示される。
「ほ場登録」の文字が描かれた操作用画像62を選択操作することで、新たな圃場Fの情報を登録することができる。「ほ場登録」が描かれた操作用画像62の下方には、現在登録されている圃場Fの数が表示されている。「作業機登録」の文字が描かれた操作用画像62を選択操作することで、新たな田植機等の作業機の情報を登録することができる。「作業機登録」の文字が描かれた操作用画像62の下方には、現在登録されている作業機の数が表示されている。
図6Bに示す圃場選択画面は、走行経路Rを生成した圃場Fを選択するための画面である。圃場選択画面では、下部表示領域61が、下部左側表示領域61Aと下部右側表示領域61Bとに分割されている。下部左側表示領域61Aには、登録された複数の圃場Fが含まれる地図情報画像63が表示される。
下部右側表示領域61Bの表示内容は、図6Bに示す圃場選択画面と同じ構成である。下部左側表示領域61Aには、図6Bに示す圃場選択画面で選択された圃場F(この実施形態では圃場F3)を拡大した地図情報画像63が表示される。下部左側表示領域61Aの上端には、作業開位置位置(経路最始点SS)、終了位置(経路最終点EE)、作業方向の選択をユーザに促す旨の選択促進画像66が表示される。
下部右側表示領域61Bには、無線通信端末100に記憶されている作業車両情報を示す作業車両情報画像67の一覧が表示される。作業車両情報画像67は、「名前順」および「登録順」等の操作用画像62が選択操作されることで、操作された順番に並び替えて表示される。作業車両選択画面においてユーザが特定の作業車両情報画像67を選択すると、他の作業車両情報画像67と識別可能に表示される。たとえば、選択された作業車両情報画像67は、枠の色が変えられて太線で囲まれる。特定の作業車両情報画像67が選択されると、下部左側表示領域61Aに、選択された作業車両の詳細情報が表示される。
植付方法設定画面の下部表示領域61には、植付方法選択用画像68が複数(この実施形態では2つ)表示される。下部表示領域61における左側部分には、畦際植付方法を選択するための畦際植付選択用画像68aが表示される。下部表示領域61において畦際植付選択用画像68aよりも下側の部分には、注意喚起画像69が表示される。注意喚起画像69は、田植機1を畦際で走行(旋回)させる際には、ユーザが継続ボタン83のタッチ操作を行う必要である旨(特定条件を満たす必要がある旨)のメッセージを含む画像である。下部表示領域61における右側部分には、通常植付方法を選択するための通常旋回選択用画像68bが表示される。
図6Gに示す設定確認画面は、図6B~図6Gの画面で設定した内容を確認するための画面である。設定確認画面の下部表示領域61には、図6B~図6Gの画面で設定した内容が表示される。具体的には、「作業車両設定」、「ほ場領域」、「作業態様」および「植付方法設定」を示す欄が表示される。各欄に設けられた「編集」の文字が描かれた操作用画像62を操作することで、対応する設定を編集することができる。
下部右側表示領域61Bの中央部には、圃場画像70中の各部の説明が表示される。詳しくは、圃場画像70中には、作業領域Wを示す作業領域画像71、直線経路Pを示す自動作業パス画像72、連結経路Cを示す自動旋回パス画像73、田植機1の現在位置を示す作業車両位置画像74、経路最始点SSを示す開始位置画像75、および、経路最終点EEを示す終了位置画像76が表示されている。図6Hでは、第1走行経路R1が選択されたときの圃場画像70が示されている。また、自動旋回パス画像73が第1連結経路C1を示している。
以下では、操作表示部103に表示される走行画面と、走行画面の操作方法について説明する。
図7Aは、自動走行開始前の走行画面である。下部表示領域61における上端には、走行開始ボタン80と、走行停止ボタン81とが表示される。
一時停止ボタン82は、エンジンを停止させることなく田植機1の自動走行を一時的に停止させるためにタッチ操作される画像である。ユーザが一時停止ボタン82をタッチ操作すると、無線通信部104から一時停止信号が発信される。田植機1が一時停止信号を受信すると、制御部4の自動走行制御部51がエンジン10を起動させたまま田植機1の自動走行を一時停止させる。
図7Cは、田植機1が前進経路E1を前進して畦FPに接近したときの走行画面である。田植機1が畦FPに接近したときの走行画面には、継続ボタン83および警告画像84を表示されている。
警告画像84は、下部表示領域61において圃場画像70よりも上側の部分に表示される。警告画像84は、田植機1が畦FPに接近した旨と、作業(自動走行)を継続するためには継続ボタン83をタッチ操作し続ける必要がある旨(特定条件の成立が必要である旨)とを表示する画像である。ユーザは、警告画像84の表示によって、特定条件が必要である旨を知ることができる。操作表示部103は、特定条件の成立が必要である旨をユーザに報知する報知部の一例である。
自動走行監視部112は、畦際を走行する田植機1の制御部4の自動走行制御部51や無線通信端末100の制御部101の操作表示部103に各種指令を付与することによって、田植機1の自動走行を監視する。自動走行監視部112は、走行画面の表示内容を表示制御部111の代わりに制御する場合がある。
第1走行経路R1を田植機1が畦FPに接近すると、自動走行監視部112は、継続ボタン83および警告画像84を操作表示部103に同時に表示させる。田植機1の後進が開始されるまでの間タッチ操作が継続された場合には、自動走行監視部112は、操作表示部103から継続ボタン83および警告画像84を操作表示部103から消去する。
継続ボタン83のタッチ操作が開始された場合であっても、田植機1の後進が開始されるまでの間タッチ操作が継続されなかった場合には、自動走行監視部112は、一時停止信号を発信する。田植機1が一時停止した場合であっても、タッチ操作が開始され、再開必要時間が経過するまでの間そのタッチ操作が継続されれば、自動走行監視部112は、走行再開信号を発信する。走行再開信号は、田植機1に自動走行を再開させるための信号である。田植機1が走行再開信号を受信すると、自動走行制御部51が田植機1の自動走行を再開させる。
まず、自動走行監視部112は、田植機1の自動走行が開始されたか否かを判定する(ステップS1)。田植機1の自動走行が開始されたか否かは、たとえば、田植機1に向けて走行開始信号が発信されたか否かに基づいて判定される。田植機1の自動走行が開始されていない場合には(ステップS1:NO)、自動走行監視部112は、ステップS1に戻る。
田植機1が畦FPに接近した場合には(ステップS2:YES)、自動走行監視部112は、操作表示部103に、継続ボタン83および警告画像84を表示させる(ステップS3)。
継続ボタン83のタッチ操作が継続されている間に田植機1が後進経路E2で後進を開始した場合には(ステップS7:YES)、自動走行監視部112は、継続ボタン83および警告画像84を操作表示部103から消去する(ステップS8)。操作表示部103から継続ボタン83および警告画像84が消去されると、自動走行監視部112は、ステップS2に戻る。
ステップS10において継続ボタン83のタッチ操作が開始されると(ステップS10:YES)、自動走行監視部112は、時間の計測を開始(タイムスタート)する(ステップS11)。タイムスタート後、自動走行監視部112は、継続ボタン83のタッチ操作が解除(OFF)されたか否かを判定する(ステップS12)。継続ボタン83のタッチ操作が解除されない場合には(ステップS12:NO)、自動走行監視部112は、タイムスタートから予め定められた再開必要時間が経過(タイムアップ)したか否かを判定する(ステップS13)。タイムアップしていない場合には(ステップS13:NO)、自動走行監視部112は、ステップS12に戻る。
なお、第2走行経路R2における田植機1の自動走行は、継続ボタン83のタッチ操作を要件としない。そのため、経路生成部110が第2走行経路R2を生成した場合には、田植機1の位置にかかわらず、操作表示部103には継続ボタン83が表示されない。また、田植機1が第2走行経路R2を自動走行する際には、自動走行監視部112による自動走行監視制御が実行されない。
また、この実施形態の自動走行システムでは、田植機1が畦FPに接近した際に、継続ボタン83のタッチ操作が必要である旨を自動走行監視部112がユーザに報知する。そして、報知後に所定時間が経過しても継続ボタン83のタッチ操作が行われない場合には、自動走行監視部112は、自動走行制御部51に田植機1の自動走行を停止させる。
上述の実施形態では、自動走行監視部112は、田植機1が後進経路E2で後進を開始した場合に継続ボタン83および警告画像84を消去するとした。しかし、上述した実施形態とは異なり、田植機1が旋回経路E3で旋回を開始した場合に自動走行監視部112が継続ボタン83および警告画像84を消去するとしてもよい。また、田植機1が旋回経路E3で旋回し終えた場合に自動走行監視部112が継続ボタン83および警告画像84を消去するとしてもよい。
また、上述の実施形態では、操作表示部103が報知部の一例であるとした。しかし、上述の実施形態とは異なり、報知部として、特定条件の成立が必要である旨の警告音を発するスピーカが無線通信端末100に設けられていてもよい。
この発明の一実施形態は、内部領域と前記内部領域を取り囲む枕地領域とを有する圃場において、前記内部領域に設定され第1始点および第1終点を接続してなる第1直線経路と、前記内部領域に設定され第2始点および第2終点を接続してなる第2直線経路と、前記枕地領域に設定され前記第1終点および前記第2始点を連結する連結経路とを有する走行経路に沿って農作業機を自動走行させる自動走行システムであって、前記連結経路として、特定条件が成立していなければ前記農作業機の自動走行が停止されるように設定された第1連結経路と、前記特定条件を前記農作業機の自動走行の要件としない第2連結経路とを選択的に生成することができる経路生成部を含む、自動走行システムを提供する。
この構成によれば、ユーザは、農作業機の自動走行中に特定条件の成立が必要なタイミングを、自動走行監視部からの報知によって知ることができる。したがって、自動走行が強制的に停止される頻度を低減することができるので、農作業機を走行経路に沿ってスムーズに自動走行させることができる。しかも、所定時間以内に特定条件が成立しなければ農作業機の自動走行が停止されるので、ユーザが自動走行監視部からの報知を認識し損なった場合であっても、第1連結経路における農作業機の自動走行を強制的に停止させることができる。そのため、農作業機を自動走行させる際のユーザの負担を低減することができる。
51 :自動走行制御部
100 :無線通信端末(自動走行システム)
103 :操作表示部(表示部、報知部)
110 :経路生成部
111 :表示制御部
112 :自動走行監視部
C :連結経路
C1 :第1連結経路
C2 :第2連結経路
E1 :前進経路
E2 :後進経路
E3 :旋回経路
EP1 :第1終点
EP2 :第2終点
F :圃場
FP :畦
N :枕地領域
P1 :第1直線経路
P2 :第2直線経路
R :走行経路
R1 :第1走行経路
R2 :第2走行経路
SP1 :第1始点
SP2 :第2始点
W :作業領域(内部領域)
Claims (5)
- 圃場において、走行経路に基づいて農作業機を自動走行させる自動走行システムであって、
前記農作業機を畦の手前まで前進させた後に、前記農作業機を一時停止させ、前記農作業機が一時停止した状態でユーザによる所定の操作が行われると、前記農作業機を前記畦に向けて前進させる走行再開処理を実行する、
自動走行システム。 - 前記走行再開処理では、前記所定の操作が継続している間のみ前記農作業機を前進させる、
請求項1に記載の自動走行システム。 - 前記所定の操作は、リモコンの操作を含む、
請求項1または2に記載の自動走行システム。 - 前記圃場は、前記畦に取り囲まれる枕地領域と、前記枕地領域に取り囲まれる内部領域とを有し、
前記走行再開処理において、前記農作業機は前記枕地領域を走行する、
請求項1~3のいずれか1項に記載の自動走行システム。 - 圃場において、走行経路に基づいて農作業機を自動走行させる農作業機制御方法であって、
前記農作業機を畦の手前まで前進させた後に、前記農作業機を一時停止させ、前記農作業機が一時停止した状態でユーザによる所定の操作が行われると、前記農作業機を前記畦に向けて前進させること、を有する、
農作業機制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023025698A JP7556074B2 (ja) | 2018-03-22 | 2023-02-22 | 自動走行システム及び農作業機制御方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018054761A JP6917935B2 (ja) | 2018-03-22 | 2018-03-22 | 自動走行システム |
| JP2021119414A JP7234305B2 (ja) | 2018-03-22 | 2021-07-20 | 自動走行システム |
| JP2023025698A JP7556074B2 (ja) | 2018-03-22 | 2023-02-22 | 自動走行システム及び農作業機制御方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021119414A Division JP7234305B2 (ja) | 2018-03-22 | 2021-07-20 | 自動走行システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023054214A JP2023054214A (ja) | 2023-04-13 |
| JP7556074B2 true JP7556074B2 (ja) | 2024-09-25 |
Family
ID=68108369
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018054761A Expired - Fee Related JP6917935B2 (ja) | 2018-03-22 | 2018-03-22 | 自動走行システム |
| JP2021119414A Active JP7234305B2 (ja) | 2018-03-22 | 2021-07-20 | 自動走行システム |
| JP2023025698A Active JP7556074B2 (ja) | 2018-03-22 | 2023-02-22 | 自動走行システム及び農作業機制御方法 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018054761A Expired - Fee Related JP6917935B2 (ja) | 2018-03-22 | 2018-03-22 | 自動走行システム |
| JP2021119414A Active JP7234305B2 (ja) | 2018-03-22 | 2021-07-20 | 自動走行システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (3) | JP6917935B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7343405B2 (ja) * | 2020-01-14 | 2023-09-12 | 株式会社クボタ | 農作業車 |
| JP7515261B2 (ja) * | 2020-01-14 | 2024-07-12 | 株式会社クボタ | 走行経路管理システム |
| JP7732839B2 (ja) * | 2021-10-14 | 2025-09-02 | 株式会社三共 | 遊技機 |
| JP7732840B2 (ja) * | 2021-10-14 | 2025-09-02 | 株式会社三共 | 遊技機 |
| JP7732843B2 (ja) * | 2021-10-14 | 2025-09-02 | 株式会社三共 | 遊技機 |
| JP7732842B2 (ja) * | 2021-10-14 | 2025-09-02 | 株式会社三共 | 遊技機 |
| JP7732841B2 (ja) * | 2021-10-14 | 2025-09-02 | 株式会社三共 | 遊技機 |
| JP7771633B2 (ja) * | 2021-11-05 | 2025-11-18 | オムロン株式会社 | 地図作成システムおよびプログラム |
| JP7609760B2 (ja) * | 2021-11-26 | 2025-01-07 | ヤンマーホールディングス株式会社 | 自動走行方法、作業車両及び自動走行システム |
| JP2023081438A (ja) | 2021-12-01 | 2023-06-13 | ヤンマーホールディングス株式会社 | 自動走行方法、作業車両及び自動走行システム |
| JP7604359B2 (ja) * | 2021-12-28 | 2024-12-23 | 株式会社クボタ | 農作業支援システム、農業機械、農作業支援装置 |
| JP7638932B2 (ja) * | 2022-06-13 | 2025-03-04 | 株式会社クボタ | 作業車 |
| JP7813204B2 (ja) | 2022-08-18 | 2026-02-12 | ヤンマーホールディングス株式会社 | 経路設定方法、経路設定システム、及び経路設定プログラム |
| JP2025057536A (ja) * | 2023-09-28 | 2025-04-09 | 井関農機株式会社 | 田んぼアート作成システム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004201530A (ja) | 2002-12-24 | 2004-07-22 | Iseki & Co Ltd | 作業車 |
| JP2015112071A (ja) | 2013-12-12 | 2015-06-22 | 株式会社クボタ | 圃場作業機 |
| JP2015159735A (ja) | 2014-02-26 | 2015-09-07 | 井関農機株式会社 | 苗移植機 |
| JP2016170523A (ja) | 2015-03-11 | 2016-09-23 | 株式会社クボタ | 走行制御装置 |
| US20170118915A1 (en) | 2015-11-03 | 2017-05-04 | Claas Selbstfahrende Erntemaschinen Gmbh | Surroundings detection device for agricultural work machines |
| JP2018033344A (ja) | 2016-08-30 | 2018-03-08 | 井関農機株式会社 | 農用作業機 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6416504A (en) * | 1987-07-13 | 1989-01-20 | Kubota Ltd | Steering controller for rice transplanter |
| JP2847674B2 (ja) * | 1991-11-14 | 1999-01-20 | 日本輸送機株式会社 | 無人作業車の制御方法 |
| JP2880479B2 (ja) * | 1997-03-10 | 1999-04-12 | 株式会社クボタ | コンバインの伝動構造 |
| JP3469814B2 (ja) * | 1999-04-16 | 2003-11-25 | 三洋電機株式会社 | ゴルフカート |
| US20140297090A1 (en) * | 2011-11-11 | 2014-10-02 | Hitachi, Ltd. | Autonomous Mobile Method and Autonomous Mobile Device |
| KR102125112B1 (ko) * | 2014-05-22 | 2020-06-22 | 얀마 파워 테크놀로지 가부시키가이샤 | 작업 차량의 주행 시스템 |
-
2018
- 2018-03-22 JP JP2018054761A patent/JP6917935B2/ja not_active Expired - Fee Related
-
2021
- 2021-07-20 JP JP2021119414A patent/JP7234305B2/ja active Active
-
2023
- 2023-02-22 JP JP2023025698A patent/JP7556074B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004201530A (ja) | 2002-12-24 | 2004-07-22 | Iseki & Co Ltd | 作業車 |
| JP2015112071A (ja) | 2013-12-12 | 2015-06-22 | 株式会社クボタ | 圃場作業機 |
| JP2015159735A (ja) | 2014-02-26 | 2015-09-07 | 井関農機株式会社 | 苗移植機 |
| JP2016170523A (ja) | 2015-03-11 | 2016-09-23 | 株式会社クボタ | 走行制御装置 |
| US20170118915A1 (en) | 2015-11-03 | 2017-05-04 | Claas Selbstfahrende Erntemaschinen Gmbh | Surroundings detection device for agricultural work machines |
| JP2018033344A (ja) | 2016-08-30 | 2018-03-08 | 井関農機株式会社 | 農用作業機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7234305B2 (ja) | 2023-03-07 |
| JP2019168812A (ja) | 2019-10-03 |
| JP6917935B2 (ja) | 2021-08-11 |
| JP2021168684A (ja) | 2021-10-28 |
| JP2023054214A (ja) | 2023-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7556074B2 (ja) | 自動走行システム及び農作業機制御方法 | |
| JP6804999B2 (ja) | 作業走行管理システム | |
| JP2018092401A (ja) | 経路生成システム | |
| KR102647044B1 (ko) | 작업 차량 | |
| CN113574486A (zh) | 自动行驶系统 | |
| JP2017127290A (ja) | 農業用作業車両 | |
| KR20200067232A (ko) | 작업 차량 | |
| CN114616945A (zh) | 作业机 | |
| JP7515382B2 (ja) | 作業機 | |
| CN113038822A (zh) | 作业车辆 | |
| JP2019076059A (ja) | 圃場作業機 | |
| JP2018097621A (ja) | 自動操舵制御装置 | |
| JP2024180443A (ja) | 作業車両 | |
| JP6477812B2 (ja) | 作業車両 | |
| JP7044477B2 (ja) | 自動操舵制御装置 | |
| JP7076524B2 (ja) | 作業走行管理システム及び作業走行管理装置 | |
| JP2018093793A5 (ja) | ||
| JP6477811B2 (ja) | 作業車両 | |
| JP7657996B2 (ja) | 自動走行システム及び自動走行方法 | |
| KR20230110486A (ko) | 작업기 및 작업 주행 시스템 | |
| CN114559954A (zh) | 作业机 | |
| JP7762630B2 (ja) | 自動走行方法、作業車両及び自動走行システム | |
| AU2022428247B2 (en) | Agricultural Work Assistance System, Agricultural Machine | |
| JP7641834B2 (ja) | 水田作業機 | |
| JP7717657B2 (ja) | 自動走行方法、自動走行システム、及び自動走行プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240911 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7556074 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |