JP7553899B2 - 位置・力制御装置、位置・力制御方法及びプログラム - Google Patents
位置・力制御装置、位置・力制御方法及びプログラム Download PDFInfo
- Publication number
- JP7553899B2 JP7553899B2 JP2020571308A JP2020571308A JP7553899B2 JP 7553899 B2 JP7553899 B2 JP 7553899B2 JP 2020571308 A JP2020571308 A JP 2020571308A JP 2020571308 A JP2020571308 A JP 2020571308A JP 7553899 B2 JP7553899 B2 JP 7553899B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- energy
- velocity
- control
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D3/00—Control of position or direction
- G05D3/12—Control of position or direction using feedback
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of leader-follower type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
- B25J3/04—Manipulators of leader-follower type, i.e. both controlling unit and controlled unit perform corresponding spatial movements involving servo mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1651—Programme controls characterised by the control loop acceleration, rate control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/4155—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by programme execution, i.e. part programme or machine function execution, e.g. selection of a programme
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39322—Force and position control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/50—Machine tool, machine tool null till machine tool work handling
- G05B2219/50391—Robot
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Manipulator (AREA)
- Control Of Position Or Direction (AREA)
- Feedback Control In General (AREA)
Description
ところが、従来のロボットの動作は、環境適応性や柔軟性に欠けており、人間の身体的行為を適切に実現するには至っていない。
ここで、マスタ・スレーブシステムにより取得した時系列な位置情報及び力情報を用いてアクチュエータの運動を人工再現する取り組みも行われているが、再現時における機械的インピーダンスが常に一定であり、依然として環境の位置・大きさ・機械的インピーダンスといった環境変動への適応性に欠けている。
なお、マスタ・スレーブシステムによって遠隔制御を行うロボットに関する技術は、例えば特許文献1及び特許文献2に記載されている。
また、今後のロボットには、人間の身体的行為を単純に実現することに加え、人間の能力を拡張した機能や人間には備えられていない機能等を実現することも求められる。
即ち、従来の技術においては、ロボットに求められる機能を適切に実現する上で、改善の余地がある。
本発明の課題は、ロボットに求められる機能をより適切に実現するための技術を提供することである。
アクチュエータの作用に基づく位置に関する情報に対応する速度(位置)及び力の情報と、制御の基準となる情報とに基づいて、実現される機能に応じて、制御エネルギーを速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に割り当てる第1の変換を行う機能別力・速度割当変換手段と、
前記機能別力・速度割当変換手段によって割り当てられた速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に基づいて、速度または位置の制御量と力の制御量との少なくとも一方を算出する制御量算出手段と、
前記速度または位置の制御量と前記力の制御量とを統合し、その出力をアクチュエータに戻すべく前記速度または位置の制御量と前記力の制御量とに第2の変換を行って、前記アクチュエータへの入力を決定する統合手段と、
を備え、
前記第1の変換による前記制御エネルギーの割り当て結果から前記アクチュエータへの入力を決定する処理において、前記制御エネルギーについて設定された条件を充足し、かつ、前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理を含むことを特徴とする。
初めに、本発明に係る位置・力制御装置、位置・力制御方法及びプログラムに適用される基本的原理について説明する。
したがって、以下、本実施形態において、「行為」とは、人間の身体における部位の個別の「機能」を構成要素として実現される統合的な機能を表すものとする。例えば、中指の曲げ伸ばしを伴う行為(ねじを回す行為等)は、中指の各関節の機能を構成要素とする統合的な機能である。
本発明における基本的原理は、どのような行為も力源と速度(位置)源及び行為を表す変換の三要素で数理的に表現できることから、変換及び逆変換により定義される変数群に対し、双対関係にある理想力源及び理想速度(位置)源より制御エネルギーを制御対象のシステムに供給することで、抽出した身体的行為を構造化し、再構築あるいは拡張増幅し身体的行為を可逆的に自動実現(再現)する、というものである。
また、行為を表す変換に対して、単純な逆変換を行った場合、行為を再現可能であるが、本発明においては、行為を表す変換の逆変換とは異なる変換を行うことにより、制御エネルギーを目的とする状態に柔軟に管理しつつ、制御対象のシステムに必要な電力を供給することを可能としている。
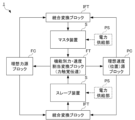
図1に示す基本的原理は、人間の身体的行為を実現するために利用可能なアクチュエータの制御則を表しており、アクチュエータの現在位置を入力として、位置(または速度)あるいは力の少なくとも一方の領域における演算を行うことにより、アクチュエータの動作を決定するものである。
即ち、本発明の基本的原理は、制御対象システムSと、機能別力・速度割当変換ブロックFTと、理想力源ブロックFCあるいは理想速度(位置)源ブロックPCの少なくとも一つと、統合変換ブロックIFTと、電力供給部PSとを含む制御則として表される。

機能別力・速度割当変換ブロックFTにおける座標変換を、実現する機能に応じて設定することにより、各種行為を実現したり、スケーリングを伴う行為の再現を行ったりすることができる。
即ち、本発明の基本的原理では、機能別力・速度割当変換ブロックFTにおいて、アクチュエータ単体の変数(実空間上の変数)を、実現する機能を表現するシステム全体の変数群(仮想空間上の変数)に“変換”し、速度(位置)の制御エネルギーと力の制御エネルギーとに制御エネルギーを割り当てる。そのため、アクチュエータ単体の変数(実空間上の変数)のまま制御を行う場合と比較して、速度(位置)の制御エネルギーと力の制御エネルギーとを独立に与えることが可能となっている。

統合変換ブロックIFTは、式(3)によって算出された加速度の値から、各アクチュエータに入力される値(電流値等)を算出する。
図2に示すように、本発明における基本原理では、第1の変換によって、接触物体との合成インピーダンスに基づく速度(位置)の制御エネルギー及び力の制御エネルギーの分配が行われ、さらに第2の変換が行われることにより、アクチュエータへの入力が決定される。
図2における曲線C1~C3は、特定の制御エネルギーを設定した場合に、第2の変換の前後において、制御エネルギーが維持される関数を示している。即ち、いずれかの曲線C1~C3上の点で表される制御エネルギーの分配が行われる場合、速度(位置)または力の一方が拡大されると、他方は縮小され、全体として制御エネルギーが維持される。
この場合、制御対象システムSに供給すべき電力にも変更が生じるところ、電力供給部PSは、この変更に対応する電力を供給することが可能となっている。
その結果、制御対象システムSのアクチュエータは、機能別力・速度割当変換ブロックFTによって定義された機能に従うことを基本としつつ、設定された速度(位置)の制御量及び力の制御量の拡大または縮小が反映された動作を実行し、目的とするロボットの動作が実現される。
即ち、本発明においては、ロボットに求められる機能をより適切に実現することが可能となる。
また、電力供給部PSにおける供給電力の制御機能によっても、アクチュエータが出力する全体の制御エネルギーを拡大または縮小し、速度(位置)及び力の拡大または縮小を実現することができる。
次に、本発明の基本的原理を適用した具体的なシステム構成例について説明する。
機能別力・速度割当変換ブロックFTでは、入力されたアクチュエータの現在位置に基づいて得られる速度(位置)及び力を対象とした座標変換(実現する機能に対応した実空間から仮想空間への変換(第1の変換))が定義されている。
即ち、アクチュエータにおける力は質量と加速度との積で表され、アクチュエータにおける速度(位置)は加速度の積分によって表される。そのため、加速度の領域を介して、速度(位置)及び力を制御することで、アクチュエータの現在位置を取得して、目的とする機能を実現することができる。
機能別力・速度割当変換ブロックFTでは、このような現在位置から速度(位置)及び力と、機能の基準値としての速度(位置)及び力とを入力として、速度(位置)及び力それぞれについての制御則が加速度次元において適用される。
即ち、アクチュエータにおける力は質量と加速度との積で表され、アクチュエータにおける速度(位置)は加速度の積分によって表される。そのため、加速度の領域を介して、速度(位置)及び力を制御することで、アクチュエータの現在位置を取得して、目的とする機能を実現することができる。
この場合、機能別力・速度割当変換ブロックFTにおける座標変換は、次式(4)及び(5)として表される。

図5は、統合変換ブロックIFTにおける第2の変換を第1の変換の逆変換とする場合及び第1の変換の逆変換以外とする場合の適用例の概念を示す模式図である。
図5では、図3及び図4に示す構成例において、力の制御エネルギー及び速度(位置)の制御エネルギーの寄与率を維持する場合及び変更する場合の例が示されている。
なお、以下の説明において、式(1)及び(2)に対応する座標変換を式(6)及び(7)で表し、式(3)に対応する座標変換を式(8)で表すものとする。

このとき、第1の変換の前後及び第2の変換の前後において、制御エネルギーはエネルギーE1に維持される。
これに対し、図5において、式(9)のような第2の変換を行った場合、第2の変換の前後において、制御エネルギーはエネルギーE1からエネルギーE2に拡大または縮小される。

このような変換が行われた場合、式(6)~(8)の座標変換によるバイラテラル制御で取得された制御パラメータを記録しておき、記録時のスレーブの動作とは異なる動作(例えば、機械インピーダンスを異ならせて柔らかい制御を行う等)を実現することができる。
なお、式(9)の変換を行う場合、第2の変換の前後において、制御エネルギーが式(6)~(8)の座標変換によるバイラテラル制御の場合とは異なることから、動作に必要な電力が、バイラテラル制御におけるスレーブに供給された電力とは異なるものとなる。
そのため、制御エネルギーを目的とする状態に柔軟に管理しつつ、制御対象のシステムに必要な電力を供給することができる。
したがって、ロボットに求められる機能をより適切に実現するための技術を提供することができる。
上述の実施形態において、機能を表す第1の変換行列によって実空間上の変数を仮想空間上の変数に変換し、仮想空間において速度(位置)の制御エネルギーと力の制御エネルギーとに制御エネルギーを割り当てた後、第2の変換行列によって、仮想空間が表す速度(位置)及び力の領域の値から制御対象システムSへの入力の領域の値に変換するものとした。そして、第2の変換において、速度(位置)の制御エネルギー及び力の制御エネルギーに関する条件を充足しつつ、速度(位置)または力の少なくとも一方の拡大または縮小を可能とした。
具体的には、理想力源ブロックFCにおいて、基準値が示す機能と同様の機能を実現する場合には、目標値としてゼロが設定されるところ、スケーリングを行う場合には、再現する機能を示す情報を拡大・縮小した値を設定することができる。即ち、基準値が示す機能に対し、力の制御エネルギーをGf倍する場合には、理想力源ブロックFCによる演算結果を基準値に追従する場合のGf倍とするように目標値を設定することができる。
ただし、この場合にも、制御エネルギーの分配点の設定可能範囲は、図2に示す力限界及び速度限界以下の範囲に制約される。そのため、理想力源ブロックFCの演算結果に対して、力限界に対応する上限値が設定されると共に、理想速度(位置)源ブロックPCの演算結果に対して、速度限界に対応する上限値が設定される。
図6では、図3及び図4に示す構成例において、力の制御エネルギー及び速度(位置)の制御エネルギーの寄与率を維持する場合及び変更する場合の例が示されている。
このとき、第1の変換の前後及び第2の変換の前後において、制御エネルギーはエネルギーE1に維持される。
なお、図6の記録時の例として示す制御を行う場合、第1の変換から第2の変換に至る過程(即ち、仮想空間における処理過程)において、制御エネルギーが拡大または縮小されることから、動作に必要な電力が、バイラテラル制御におけるスレーブに供給された電力とは異なるものとなる。
本変形例の制御則によっても、制御エネルギーを目的とする状態に柔軟に管理しつつ、制御対象のシステムに必要な電力を供給することができる。
上述の実施形態において、制御対象システムSへの入力(即ち、アクチュエータへの入力)の段階で、全体の制御エネルギーを拡大または縮小することができる。
即ち、上述の実施形態に示すように、統合変換ブロックIFTにおける第2の変換によって速度(位置)または力の少なくとも一方を拡大または縮小することが可能である他、電力供給部PSにおける供給電力の制御機能によって、アクチュエータの動作の規模を拡大または縮小することが可能である。この場合、第2の変換によって算出された速度(位置)の制御エネルギー及び力の制御エネルギーの寄与率は維持されたまま、全体の制御エネルギーが拡大または縮小される。
本変形例の制御則によって全体の制御エネルギーを拡大または縮小した場合、アクチュエータの出力が第1の座標変換及び第2の座標変換以外の処理において変更される。そのため、第1の座標変換における入力として用いられるアクチュエータの現在位置を、拡大または縮小した度合いに応じて補正(即ち、制御エネルギーが拡大または縮小されない状態に復元)することとしてもよい。
本変形例の制御則によっても、制御エネルギーを目的とする状態に柔軟に管理しつつ、制御対象のシステムに必要な電力を供給することができる。
以上のように、本発明の第1の態様に係る位置・力制御装置によれば、機能別力・速度割当変換手段は、アクチュエータの作用に基づく位置に関する情報に対応する速度(位置)及び力の情報と、制御の基準となる情報とに基づいて、実現される機能に応じて、制御エネルギーを速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に割り当てる第1の変換を行う。そして、制御量算出手段は、機能別力・速度割当変換手段によって割り当てられた速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に基づいて、速度または位置の制御量と力の制御量との少なくとも一方を算出する。さらに、統合手段は、速度または位置の制御量と前記力の制御量とを統合し、その出力をアクチュエータに戻すべく前記速度または位置の制御量と前記力の制御量とに第2の変換を行って、前記アクチュエータへの入力を決定する。そして、第1の変換による制御エネルギーの割り当て結果からアクチュエータへの入力を決定する処理において、制御エネルギーについて設定された条件を充足し、かつ、速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理が行われる。
第1の変換による制御エネルギーの割り当て結果に第2の変換を適用することにより、制御エネルギーについて設定された条件を充足し、かつ、速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理が行われる。
そのため、制御エネルギーを目的とする状態に柔軟に管理しつつ、制御対象のシステムに必要な電力を供給することができる。
したがって、ロボットに求められる機能をより適切に実現するための技術を提供することができる。
例えば、上述の実施形態及び変形例を適宜組み合わせることが可能であり、この場合、上述の実施形態及び変形例1,2のうち、2つ以上の構成を組み合わせた位置・力制御装置とすることができる。
また、上述の実施形態及び変形例1,2において、速度または位置の制御エネルギーあるいは力のエネルギーを縮小する場合、エネルギーをゼロとする(即ち、速度または位置の制御量あるいは力の制御量を無効とする)こととしてもよい。この場合、本発明の制御則のうち、位置または速度の制御と力の制御とのうち、一方を利用することができる。
即ち、上述の処理を実行できる機能が位置・力制御システム1に備えられていればよく、この機能を実現するためにどのような機能構成及びハードウェア構成とするかは上述の例に限定されない。
上述の処理をソフトウェアにより実行させる場合には、そのソフトウェアを構成するプログラムが、コンピュータにネットワークや記憶媒体からインストールされる。
Claims (11)
- アクチュエータの作用に基づく位置に関する情報に対応する速度(位置)及び力の情報と、制御の基準となる情報とに基づいて、実現される機能に応じて、制御エネルギーを速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に割り当てる第1の変換を行う機能別力・速度割当変換手段と、
前記機能別力・速度割当変換手段によって割り当てられた速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に基づいて、速度または位置の制御量と力の制御量との少なくとも一方を算出する制御量算出手段と、
前記速度または位置の制御量と前記力の制御量とを統合し、その出力をアクチュエータに戻すべく前記速度または位置の制御量と前記力の制御量とに第2の変換を行って、前記アクチュエータへの入力を決定する統合手段と、
を備え、
前記第1の変換による前記制御エネルギーの割り当て結果から前記アクチュエータへの入力を決定する処理において、前記制御エネルギーについて設定された条件を充足し、かつ、前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理を含み、
前記第1の変換では、速度または位置と、力とを独立に取り扱うことが可能な空間への座標変換を行い、
前記制御エネルギーについて設定された条件として、前記速度または位置と前記力との対応関係に基づいて定められた前記制御エネルギーの合計に関する設定可能範囲内で、前記速度または位置のエネルギーと前記力のエネルギーとが設定されることを特徴とする位置・力制御装置。 - 前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理は、制御対象に対して予め設定された速度限界及び力限界の範囲で、前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方を変化させることを特徴とする請求項1に記載の位置・力制御装置。
- 前記第2の変換は、前記第1の変換の逆変換とは異なる変換であり、前記速度または位置の制御量と前記力の制御量との少なくとも一方を拡大または縮小することを特徴とする請求項1または2に記載の位置・力制御装置。
- 前記第2の変換は、前記第1の変換の逆変換であり、前記統合手段の出力において全体のエネルギーを拡大または縮小することを特徴とする請求項1から3のいずれか1項に記載の位置・力制御装置。
- 前記アクチュエータとは異なる他のアクチュエータをさらに備え、
前記アクチュエータはマスタ装置及びスレーブ装置の一方として動作し、前記他のアクチュエータは前記マスタ装置及び前記スレーブ装置の他方として動作することを特徴とする請求項1から4のいずれか1項に記載の位置・力制御装置。 - マスタ装置として動作するアクチュエータ及びスレーブ装置として動作するアクチュエータの間で実行されるバイラテラル制御で取得されたパラメータに基づいて、前記速度または位置のエネルギーと力のエネルギーとを前記マスタ装置または前記スレーブ装置とは異ならせて前記アクチュエータを制御することを特徴とする請求項1から5のいずれか1項に記載の位置・力制御装置。
- アクチュエータの作用に基づく位置に関する情報に対応する速度(位置)及び力の情報と、制御の基準となる情報とに基づいて、実現される機能に応じて、制御エネルギーを速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に割り当てる第1の変換を行う機能別力・速度割当変換手段と、
前記機能別力・速度割当変換手段によって割り当てられた速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に基づいて、速度または位置の制御量と力の制御量との少なくとも一方を算出する制御量算出手段と、
前記速度または位置の制御量と前記力の制御量とを統合し、その出力をアクチュエータに戻すべく前記速度または位置の制御量と前記力の制御量とに第2の変換を行って、前記アクチュエータへの入力を決定する統合手段と、
を備え、
前記第1の変換による前記制御エネルギーの割り当て結果から前記アクチュエータへの入力を決定する処理において、前記制御エネルギーについて設定された条件を充足し、かつ、前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理を含み、
前記第2の変換は、前記第1の変換の逆変換であり、前記統合手段の出力において全体のエネルギーを拡大または縮小することを特徴とする位置・力制御装置。 - アクチュエータの作用に基づく位置に関する情報に対応する速度(位置)及び力の情報と、制御の基準となる情報とに基づいて、実現される機能に応じて、制御エネルギーを速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に割り当てる第1の変換を行う機能別力・速度割当変換ステップと、
前記機能別力・速度割当変換ステップにおいて割り当てられた速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に基づいて、速度または位置の制御量と力の制御量との少なくとも一方を算出する制御量算出ステップと、
前記速度または位置の制御量と前記力の制御量とを統合し、その出力をアクチュエータに戻すべく前記速度または位置の制御量と前記力の制御量とに第2の変換を行って、前記アクチュエータへの入力を決定する統合ステップと、
を含み、
前記第1の変換による前記制御エネルギーの割り当て結果から前記アクチュエータへの入力を決定する処理において、前記制御エネルギーについて設定された条件を充足し、かつ、前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理を含み、
前記第1の変換では、速度または位置と、力とを独立に取り扱うことが可能な空間への座標変換を行い、
前記制御エネルギーについて設定された条件として、前記速度または位置と前記力との対応関係に基づいて定められた前記制御エネルギーの合計に関する設定可能範囲内で、前記速度または位置のエネルギーと前記力のエネルギーとが設定されることを特徴とする位置・力制御方法。 - アクチュエータの作用に基づく位置に関する情報に対応する速度(位置)及び力の情報と、制御の基準となる情報とに基づいて、実現される機能に応じて、制御エネルギーを速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に割り当てる第1の変換を行う機能別力・速度割当変換ステップと、
前記機能別力・速度割当変換ステップにおいて割り当てられた速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に基づいて、速度または位置の制御量と力の制御量との少なくとも一方を算出する制御量算出ステップと、
前記速度または位置の制御量と前記力の制御量とを統合し、その出力をアクチュエータに戻すべく前記速度または位置の制御量と前記力の制御量とに第2の変換を行って、前記アクチュエータへの入力を決定する統合ステップと、
を含み、
前記第1の変換による前記制御エネルギーの割り当て結果から前記アクチュエータへの入力を決定する処理において、前記制御エネルギーについて設定された条件を充足し、かつ、前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理を含み、
前記第2の変換は、前記第1の変換の逆変換であり、前記統合ステップの出力において全体のエネルギーを拡大または縮小することを特徴とする位置・力制御方法。 - コンピュータに、
アクチュエータの作用に基づく位置に関する情報に対応する速度(位置)及び力の情報と、制御の基準となる情報とに基づいて、実現される機能に応じて、制御エネルギーを速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に割り当てる第1の変換を行う機能別力・速度割当変換機能と、
前記機能別力・速度割当変換機能によって割り当てられた速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に基づいて、速度または位置の制御量と力の制御量との少なくとも一方を算出する制御量算出機能と、
前記速度または位置の制御量と前記力の制御量とを統合し、その出力をアクチュエータに戻すべく前記速度または位置の制御量と前記力の制御量とに第2の変換を行って、前記アクチュエータへの入力を決定する統合機能と、
を実現させ、
前記第1の変換による前記制御エネルギーの割り当て結果から前記アクチュエータへの入力を決定する処理において、前記制御エネルギーについて設定された条件を充足し、かつ、前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理を含み、
前記第1の変換では、速度または位置と、力とを独立に取り扱うことが可能な空間への座標変換を行い、
前記制御エネルギーについて設定された条件として、前記速度または位置と前記力との対応関係に基づいて定められた前記制御エネルギーの合計に関する設定可能範囲内で、前記速度または位置のエネルギーと前記力のエネルギーとが設定されることを特徴とするプログラム。 - コンピュータに、
アクチュエータの作用に基づく位置に関する情報に対応する速度(位置)及び力の情報と、制御の基準となる情報とに基づいて、実現される機能に応じて、制御エネルギーを速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に割り当てる第1の変換を行う機能別力・速度割当変換機能と、
前記機能別力・速度割当変換機能によって割り当てられた速度または位置のエネルギーと力のエネルギーとのうち、少なくとも一方に基づいて、速度または位置の制御量と力の制御量との少なくとも一方を算出する制御量算出機能と、
前記速度または位置の制御量と前記力の制御量とを統合し、その出力をアクチュエータに戻すべく前記速度または位置の制御量と前記力の制御量とに第2の変換を行って、前記アクチュエータへの入力を決定する統合機能と、
を実現させ、
前記第1の変換による前記制御エネルギーの割り当て結果から前記アクチュエータへの入力を決定する処理において、前記制御エネルギーについて設定された条件を充足し、かつ、前記速度または位置のエネルギーと力のエネルギーとの少なくとも一方の拡大または縮小に相当する処理を含み、
前記第2の変換は、前記第1の変換の逆変換であり、前記統合機能の出力において全体のエネルギーを拡大または縮小することを特徴とするプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019021104 | 2019-02-07 | ||
| JP2019021104 | 2019-02-07 | ||
| PCT/JP2020/004933 WO2020162619A1 (ja) | 2019-02-07 | 2020-02-07 | 位置・力制御装置、位置・力制御方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020162619A1 JPWO2020162619A1 (ja) | 2020-08-13 |
| JP7553899B2 true JP7553899B2 (ja) | 2024-09-19 |
Family
ID=71948290
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020571308A Active JP7553899B2 (ja) | 2019-02-07 | 2020-02-07 | 位置・力制御装置、位置・力制御方法及びプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12285862B2 (ja) |
| JP (1) | JP7553899B2 (ja) |
| TW (1) | TW202045323A (ja) |
| WO (1) | WO2020162619A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2021172580A1 (ja) | 2020-02-27 | 2021-09-02 | ||
| US12397419B2 (en) * | 2023-03-06 | 2025-08-26 | Mitsubishi Electric Research Laboratories, Inc. | System and method for controlling a robotic manipulator |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007274783A (ja) | 2006-03-30 | 2007-10-18 | Aisin Aw Co Ltd | 電動駆動制御装置及び電動駆動制御方法 |
| WO2013108356A1 (ja) | 2012-01-16 | 2013-07-25 | 三菱電機株式会社 | モータ制御装置 |
| WO2015041046A1 (ja) | 2013-09-19 | 2015-03-26 | 学校法人慶應義塾 | 位置・力制御装置、位置・力制御方法及びプログラム |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07295650A (ja) | 1994-04-21 | 1995-11-10 | Ricoh Co Ltd | 多関節型ロボットの制御方法 |
| EP0965416B1 (en) * | 1996-12-19 | 2005-12-07 | Honda Giken Kogyo Kabushiki Kaisha | Attitude controller of legged moving robot |
| US7672741B2 (en) | 2003-07-24 | 2010-03-02 | Keio University | Position/force control device |
| US7731670B2 (en) * | 2007-02-02 | 2010-06-08 | Honda Motor Co., Ltd. | Controller for an assistive exoskeleton based on active impedance |
| US20090132088A1 (en) * | 2007-04-24 | 2009-05-21 | Tairob Ltd. | Transfer of knowledge from a human skilled worker to an expert machine - the learning process |
| JP2009279699A (ja) | 2008-05-21 | 2009-12-03 | Nagaoka Univ Of Technology | 位置・力再現方法および位置・力再現装置 |
| JP5242342B2 (ja) * | 2008-10-31 | 2013-07-24 | 株式会社東芝 | ロボット制御装置 |
| CN102448683B (zh) * | 2009-07-02 | 2014-08-27 | 松下电器产业株式会社 | 机器人、机器人手臂的控制装置及机器人手臂的控制程序 |
| US8885315B2 (en) * | 2009-10-15 | 2014-11-11 | Hamilton Sundstrand Corporation | Multi-actuator motion control system |
| US8942908B2 (en) * | 2010-04-30 | 2015-01-27 | GM Global Technology Operations LLC | Primary torque actuator control systems and methods |
| JP5650814B1 (ja) | 2013-07-05 | 2015-01-07 | ファナック株式会社 | フィードフォワード制御を備えたモータ制御装置 |
| DE102013016019B3 (de) * | 2013-09-25 | 2015-03-19 | Festo Ag & Co. Kg | Verfahren zum Betreiben eines mehrgliedrigen Manipulators |
| JP6511715B2 (ja) * | 2013-10-31 | 2019-05-15 | セイコーエプソン株式会社 | ロボット制御装置、ロボットシステム、及びロボット |
| JP5893665B2 (ja) * | 2014-04-14 | 2016-03-23 | ファナック株式会社 | 作用された力に応じて移動されるロボットを制御するロボット制御装置 |
| US10806530B2 (en) * | 2015-06-10 | 2020-10-20 | Intuitive Surgical Operations, Inc. | System and method for patient-side instrument control |
| JP6564739B2 (ja) * | 2016-06-30 | 2019-08-21 | 日立建機株式会社 | 作業機械 |
| JP6960242B2 (ja) * | 2017-05-19 | 2021-11-05 | 川崎重工業株式会社 | ロボットシステム及びロボットシステムの制御方法 |
| JP7018759B2 (ja) | 2017-12-14 | 2022-02-14 | 学校法人慶應義塾 | 位置・力制御装置 |
| JP6964293B2 (ja) | 2018-03-08 | 2021-11-10 | 地方独立行政法人神奈川県立産業技術総合研究所 | 力触覚伝達システム、力触覚伝達方法及びプログラム |
| US20190367029A1 (en) * | 2018-05-30 | 2019-12-05 | International Business Machines Corporation | Dynamic speed controller for vehicle |
| US20200323657A1 (en) * | 2019-04-15 | 2020-10-15 | Board Of Regents, The University Of Texas System | Systems And Methods For Robotic Mirror Therapy Of The Hand |
| US20220331025A1 (en) * | 2019-09-24 | 2022-10-20 | Intuitive Surgical Operations, Inc. | Method and system for controlling instrument grip behavior |
| CN111136633B (zh) * | 2020-01-13 | 2021-04-09 | 燕山大学 | 针对时变时延下柔性主-从机器人系统的全状态控制方法 |
| JP7679178B2 (ja) * | 2020-03-31 | 2025-05-19 | 地方独立行政法人神奈川県立産業技術総合研究所 | 医療用ドリル、及び医療用プログラム |
| CN118044111A (zh) * | 2021-10-07 | 2024-05-14 | 发那科株式会社 | 控制装置、机械系统以及显示装置 |
| JP2023069957A (ja) * | 2021-11-08 | 2023-05-18 | トヨタ紡織株式会社 | 位置・力制御システム、位置・力制御装置、位置・力制御方法及びプログラム |
-
2020
- 2020-02-07 US US17/429,240 patent/US12285862B2/en active Active
- 2020-02-07 JP JP2020571308A patent/JP7553899B2/ja active Active
- 2020-02-07 TW TW109103801A patent/TW202045323A/zh unknown
- 2020-02-07 WO PCT/JP2020/004933 patent/WO2020162619A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007274783A (ja) | 2006-03-30 | 2007-10-18 | Aisin Aw Co Ltd | 電動駆動制御装置及び電動駆動制御方法 |
| WO2013108356A1 (ja) | 2012-01-16 | 2013-07-25 | 三菱電機株式会社 | モータ制御装置 |
| WO2015041046A1 (ja) | 2013-09-19 | 2015-03-26 | 学校法人慶應義塾 | 位置・力制御装置、位置・力制御方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020162619A1 (ja) | 2020-08-13 |
| US12285862B2 (en) | 2025-04-29 |
| US20220134542A1 (en) | 2022-05-05 |
| TW202045323A (zh) | 2020-12-16 |
| JPWO2020162619A1 (ja) | 2020-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7553899B2 (ja) | 位置・力制御装置、位置・力制御方法及びプログラム | |
| JPS5890203A (ja) | サ−ボ系 | |
| US20130002669A1 (en) | Method and apparatus for expressing rigid area based on expression control points | |
| JP2013093030A (ja) | 骨に沿った筋肉の運動および関節のまわりの筋肉の運動を数値的にシミュレートする方法およびシステム | |
| JP7772591B2 (ja) | 位置・力制御装置、位置・力制御方法及びプログラム | |
| JPH0683427A (ja) | 柔軟マニピュレータの作業点位置制御システム | |
| Pezzementi et al. | Modeling realistic tool-tissue interactions with haptic feedback: A learning-based method | |
| CN119941943A (zh) | 一种虚拟数字人动作处理系统 | |
| EP0941581A1 (en) | Method for improved reproduction of digital signals | |
| Geronzi et al. | Advanced radial basis functions mesh morphing for high fidelity fluid-structure interaction with known movement of the walls: simulation of an aortic valve | |
| Gonenc et al. | Virtual tissue cutting with haptic feedback using a hybrid actuator with dc servomotor and magnetorheological brake | |
| Hashemi-Dehkordi et al. | Reducing friction-induced vibration using intelligent active force control (AFC) with piezoelectric actuators | |
| Angeli et al. | A machine learning approach for minimal coordinate multibody simulation | |
| JP6933758B1 (ja) | 情報処理プログラム、情報処理装置及び情報処理方法 | |
| CN116075782B (zh) | 参数调整装置及参数调整方法 | |
| Amirkhani et al. | Stable haptic rendering in interactive virtual control laboratory | |
| US12377533B2 (en) | Control system, control method, and storage medium | |
| Aitygulov | The use of reinforcement learning in the task of moving objects with the robotic arm | |
| Banaś et al. | Modelling industrial robot fanuc ARC mate 100iB in LabVIEW | |
| Kannan et al. | Adaptive control of hysteretic robotic arm in operational space | |
| CN118081771A (zh) | 操作对象的运动模型生成方法、装置、机器人及存储介质 | |
| Dumitru et al. | Kinematic and dynamic study contributions on human jaw system | |
| Mohtat et al. | A Control-Oriented Framework for Direct Impulse-Based Rendering of Haptic Contacts | |
| WO2022196308A1 (ja) | データ加工装置、データ加工方法、及びプログラム | |
| Deo et al. | A higher order polynomial reproducing radial basis function neural network (HOPR-RBFN) for real-time interactive simulations of nonlinear deformable bodies with haptic feedback |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AA64 | Notification of invalidation of claim of internal priority (with term) |
Free format text: JAPANESE INTERMEDIATE CODE: A241764 Effective date: 20211102 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20211120 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240318 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240327 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240514 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240731 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240827 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7553899 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |