JP7679178B2 - 医療用ドリル、及び医療用プログラム - Google Patents
医療用ドリル、及び医療用プログラム Download PDFInfo
- Publication number
- JP7679178B2 JP7679178B2 JP2020064687A JP2020064687A JP7679178B2 JP 7679178 B2 JP7679178 B2 JP 7679178B2 JP 2020064687 A JP2020064687 A JP 2020064687A JP 2020064687 A JP2020064687 A JP 2020064687A JP 7679178 B2 JP7679178 B2 JP 7679178B2
- Authority
- JP
- Japan
- Prior art keywords
- treatment
- actuator
- force
- control
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1626—Control means; Display units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1628—Motors; Power supplies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1662—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for particular parts of the body
- A61B17/1671—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for particular parts of the body for the spine
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00115—Electrical control of surgical instruments with audible or visual output
- A61B2017/00119—Electrical control of surgical instruments with audible or visual output alarm; indicating an abnormal situation
- A61B2017/00123—Electrical control of surgical instruments with audible or visual output alarm; indicating an abnormal situation and automatic shutdown
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/065—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring contact or contact pressure
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Description
これら特許文献1や特許文献2に開示の技術では、生体組織を開孔するための施術機構(例えば、実際に切削を行うドリル刃)をモータで動作させると共に、このモータの電流値の変動に基づいてモータの動作制御を行っている。
この点、施術機構の状態を、より適切に示す情報を取得することができれば、より精度高い動作制御を行ったり、ユーザに対してこの適切な情報を通知したりすることができる。
患者に対する施術用の施術機構と、
前記施術機構に施術を行わせる施術用アクチュエータと、
前記施術に伴い検出された位置に関する情報に基づいて、力触覚に関する制御パラメータを算出すると共に、該力触覚に関する制御パラメータに基づいて、前記施術用アクチュエータによる前記施術機構に施術を行わせるための動作を制御する動作制御手段と、
前記力触覚に関する制御パラメータを取得するパラメータ取得手段と、
を備えることを特徴とする。
以下では、本発明の実施形態の一例として、第1の実施形態、第2の実施形態、及び第3の実施形態という3つの実施形態について説明をする。まず前提として、これら3つの実施形態に共通する本発明の基本的概念について説明する。
本発明の各実施形態に係る医療機器は、少なくとも、施術機構と、施術用アクチュエータと、動作制御部と、パラメータ取得部と、を備える。
施術機構は、患者に対する施術用の機構である。そして、施術用アクチュエータは、施術機構に施術を行わせる。この場合に、動作制御部は、施術に伴い検出された位置に関する情報に基づいて、力触覚に関する制御パラメータを算出すると共に、該力触覚に関する制御パラメータに基づいて、施術用アクチュエータによる施術機構に施術を行わせるための動作を制御する。そして、パラメータ取得部は、この力触覚に関する制御パラメータを取得する。
また、本発明の各実施形態に係る医療機器によれば、この適切な情報に基づいてより精度高く動作制御を行ったり、ユーザに対してこの適切な情報を通知したりすることもできる。
以上が、本発明の基本的概念である。次に、各実施形態について詳細に説明をする。
[構成]
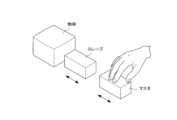
図1は、本実施形態に係る医療機器1aの基本的構成を示す模式図である。なお、図1においては、施術を行う際の医療機器1aの移動方向(図中では矢印にて表す)を正面とした場合の、医療機器1aの側面図が模式的に示されると共に、可動筐体10及び固定筐体20を透過して内部構成が示されている。また、図1においては、これら可動筐体10及び固定筐体20に有線接続されている情報処理ユニット50と、施術の対象となる施術対象部位60と、についても模式的に示されている。
ただし、これは説明のための一例に過ぎず、各実施形態の適用範囲は、これに限られない。例えば、各実施形態に係る医療機器1a(後述の医療機器1b及び医療機器1cを含む)は、医療用ドリルを含む医療機器全般に適用できる。また、各実施形態において、施術対象部位60は、人間等の生体の脊椎骨であってもよいが、生体の脊椎骨以外の骨や骨以外の身体部位であってもよいし、生体の身体の内部又は外部に配置された他の物体(例えば、人工関節や人工骨といった人工的な器官や、身体を固定するギプス等)の部位であってもよい。
ここで、ドリル刃回転モータ22及びドリル刃23は、ドリル軸に沿って直動可能な状態で固定筐体20と接続されている。従って、ドリル刃23の先端部(すなわち、施術対象部位60に接触して切削を行う部分)は、スレーブ側アクチュエータ212が付与する推進力における推進方向に応じて、固定筐体20から露出したり、遮蔽したりする。
ここでその詳細については後述するが、医療機器1aでは、情報処理ユニット50による制御によって、マスタ側ユニット11をマスタ装置とし、スレーブ側ユニット21をスレーブ装置としたバイラテラル制御機能が実現される。すなわち、マスタ装置の動作(ここでは、可動筐体10が受け付けたユーザによる移動操作)がスレーブ装置に伝達すると共に、スレーブ装置に対する物体からの反力(ここでは、ドリル刃23の切削に対する施術対象部位60からの反力)の入力をマスタ装置にフィードバックするバイラテラル制御機能が実現される。
次に、上述した各実施形態に係る医療機器1での具体的な処理の説明の前提として、本実施形態における、制御対象装置(ここでは、各実施形態に係る医療機器1)に対する動作制御の基本的原理について説明する。
したがって、本発明の各実施形態において、「動作」とは、人間の身体における部位の個別の「機能」を構成要素として実現される統合的な機能を表すものとする。例えば、ユーザの手等によってマスタ装置を移動させる操作は、手の各指や手首、及びこれらに連結する腕や肩の関節等の機能を構成要素とする統合的な機能である。
本発明の各実施形態における動作の制御の基本的原理は、どのような動作も力源と速度(位置)源及び動作を表す変換の三要素で数理的に表現できることから、変換及び逆変換により定義される変数群に対し、双対関係にある理想力源及び理想速度(位置)源より制御エネルギーを制御対象のシステムに供給することで、抽出した動作を構造化し、再構築あるいは拡張増幅し動作を可逆的に自動実現(再現)する、というものである。
図2に示す基本的原理は、人間の動作を実現するために利用可能なアクチュエータの制御則を表しており、アクチュエータの現在位置を入力として、位置(又は速度)あるいは力の少なくとも一方の領域における演算を行うことにより、アクチュエータの動作を決定するものである。
すなわち、本発明の各実施形態における制御対象装置の動作の制御の基本的原理は、制御対象システムCSと、機能別力・速度割当変換ブロックFTと、理想力源ブロックFCあるいは理想速度(位置)源ブロックPCの少なくとも1つと、逆変換ブロックIFTとを含む制御則として表される。

すなわち、本発明の各実施形態における制御対象装置の動作の制御の基本的原理では、機能別力・速度割当変換ブロックFTにおいて、アクチュエータ単体の変数(実空間上の変数)を、実現する機能を表現するシステム全体の変数群(仮想空間上の変数)に“変換”し、速度(位置)の制御エネルギーと力の制御エネルギーとに制御エネルギーを割り当てる。そのため、アクチュエータ単体の変数(実空間上の変数)のまま制御を行う場合と比較して、速度(位置)の制御エネルギーと力の制御エネルギーとを独立に与えることが可能となっている。
このような基本的原理により、制御対象システムCSのアクチュエータにおける位置の情報が機能別力・速度割当変換ブロックFTに入力されると、位置の情報に基づいて得られる速度(位置)及び力の情報を用いて、機能別力・速度割当変換ブロックFTにおいて、機能に応じた位置及び力の領域それぞれの制御則が適用される。そして、理想力源ブロックFCにおいて、機能に応じた力の演算が行われ、理想速度(位置)源ブロックPCにおいて、機能に応じた速度(位置)の演算が行われ、力及び速度(位置)それぞれに制御エネルギーが分配される。
その結果、制御対象システムCSのアクチュエータは、機能別力・速度割当変換ブロックFTによって定義された機能に従う動作を実行し、目的とするロボットの動作が実現される。
すなわち、本発明の各実施形態においては、ロボットによって所定の行為時の人間の動作をより適切に実現することが可能となる。
次に、機能別力・速度割当変換ブロックFTによって定義される機能の具体例について説明する。
機能別力・速度割当変換ブロックFTでは、入力されたアクチュエータの現在位置に基づいて得られる速度(位置)及び力を対象とした座標変換(実現する機能に対応した実空間から仮想空間への変換)が定義されている。
機能別力・速度割当変換ブロックFTでは、このような現在位置から速度(位置)及び力と、機能の基準値としての速度(位置)及び力とを入力として、速度(位置)及び力それぞれについての制御則が加速度次元において適用される。
すなわち、アクチュエータにおける力は質量と加速度との積で表され、アクチュエータにおける速度(位置)は加速度の積分によって表される。そのため、加速度の領域を介して、速度(位置)及び力を制御することで、アクチュエータの現在位置を取得して、目的とする機能を実現することができる。
(力・触覚伝達機能)
図3は、機能別力・速度割当変換ブロックFTにおいて力・触覚伝達機能が定義された場合の制御の概念を示す模式図である。また、図4は、力・触覚伝達機能が適用されるマスタ装置及びスレーブ装置を含むマスタ・スレーブシステムの概念を示す模式図である。
この場合、機能別力・速度割当変換ブロックFTにおける座標変換は、次式(3)及び(4)として表される。

上述の力・触覚伝達機能において、位置、力及び時間のスケーリング機能をさらに実現することができる。
スケーリング機能とは、基準となる制御に対して、出力される位置、力あるいは時間のスケールを拡大あるいは縮小する機能である。スケーリング機能によって、例えば、マスタ装置の動きの大きさを縮小してスレーブ装置で再現したり、マスタ装置の動きの強さ(力)を強めてスレーブ装置で再現したり、あるいは、マスタ装置の動きの速度を低下させてスレーブ装置で再現したりすることができる。
以下、スケーリング機能を実現するための構成例について説明する。
スケーリングを伴う力・触覚伝達機能が実現される場合、図2における機能別力・速度割当変換ブロックFTにおける座標変換は、次式(5)及び(6)として表される。

このようなスケーリング機能によって、例えば、施術の際に、ユーザの操作に伴う力触覚を抑制したり、強調したりすることができるため、より繊細な作業や、より力の必要な作業を行う場合に有効となる。
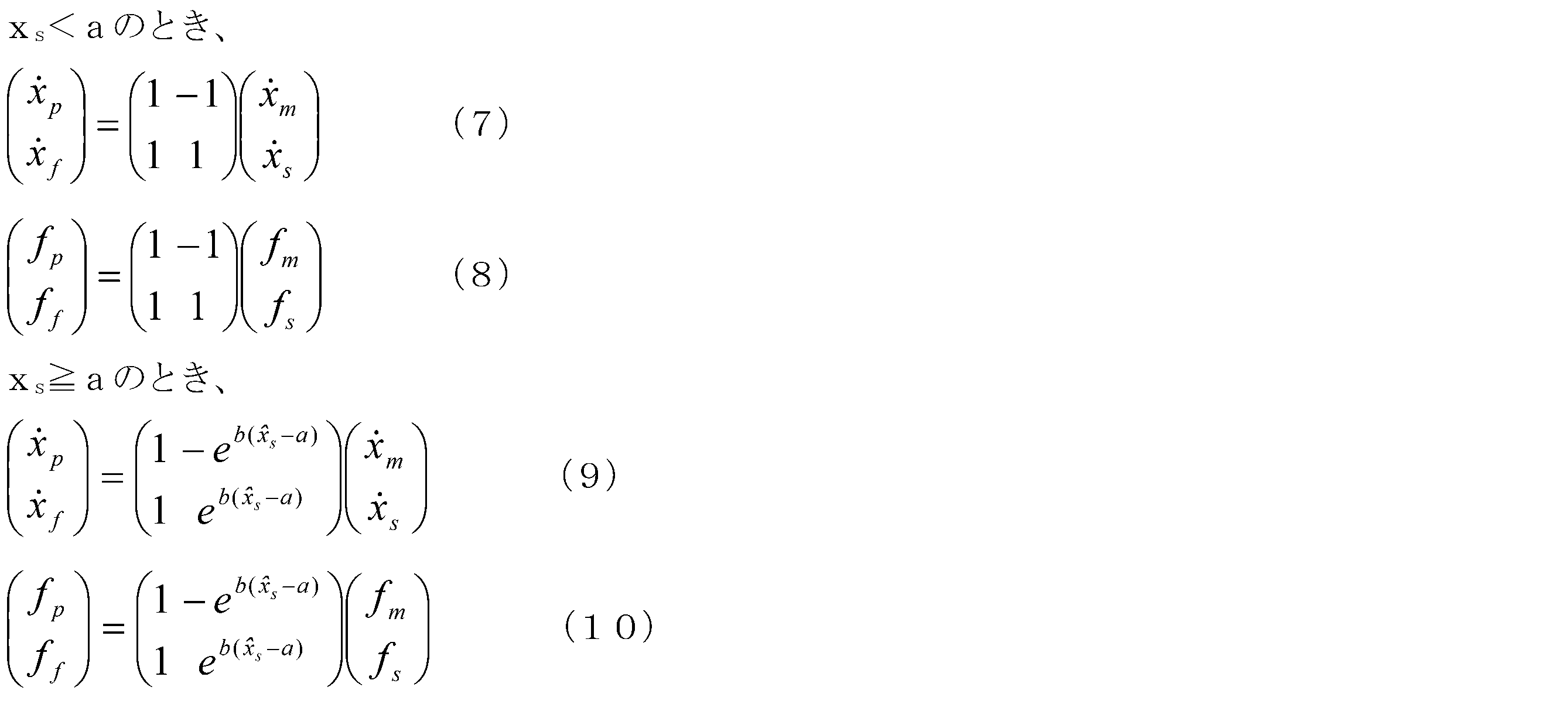
スケーリングによる位置の制限を伴う力・触覚伝達機能が実現される場合、図2における機能別力・速度割当変換ブロックFTにおける座標変換は、例えば、次式(7)~(10)として表される。
なお、このような機能を実現する場合、以下のような条件を考慮することが適当である。
・速度次元まで連続であること(ヤコビ行列の存在条件)
・制限後の位置が元の位置の単調増加関数であること(安定性の条件)
・xs<aの時にはxs=xshatもしくはxs≒xshat(xshatは式(9)及び式(10)において機能別力・速度割当変換ブロックFTに含まれるパラメータ)
(安全領域での制御性能を保証する条件)
・飽和関数であること(ポジションリミットを実現する条件)
これらの条件を満たす他の関数として、atan関数を採用することも可能である。
このようなスケーリング機能によって、例えば、施術の際に、ユーザの操作に伴うスレーブ装置の移動を抑制したすることが可能となる。
次に、マスタ側ユニット11及びスレーブ側ユニット21の構成について、図5を参照して説明をする。図5は、医療機器1aにおける、マスタ側ユニット11及びスレーブ側ユニット21の基本的構成を示す模式図である。
マスタ側ユニット11は、マスタ側ドライバ111と、マスタ側アクチュエータ112と、マスタ側位置センサ113と、を備える。また、マスタ側ユニット11は、マスタ側アクチュエータ112により、操作機構70を動作させる。上述したように、医療機器1aでは、可動筐体10が操作機構70に相当する。
なお、以下の説明において、マスタ側とスレーブ側を区別することなく説明する場合には、名称や符号の一部を省略して、単に「ユニット」、「ドライバ」、「アクチュエータ」、「位置センサ」と称する。
また、医療機器1aに実装される機能は、上述したように、情報処理ユニット50にて実現される機能別力・速度割当変換ブロックFTによって定義される座標変換を切り替えることで、種々変更することができる。
情報処理ユニット50は、図2や図3における機能別力・速度割当変換ブロックFTと、理想力源ブロックFCと、理想速度(位置)源ブロックPCと、逆変換ブロックIFTとの機能を備えている。そして、情報処理ユニット50では、これらの機能により、マスタ装置及びスレーブ装置の一方の装置として動作するための制御を行う。
アクチュエータは、ドライバから入力された制御指令値に従って駆動され、制御対象装置の位置(すなわち、操作機構70に相当する可動筐体10の位置、又は、施術機構80に相当するドリル刃23(及びこれに連結されたドリル刃回転モータ22)の位置)を制御する。
位置センサは、アクチュエータによって制御される制御対象装置の位置を検出し、検出値を情報処理ユニット50に出力する。
なお、図中において、プロセッサ51は、単一のプロセッサとして図示されているが、これは一例に過ぎない。例えば、プロセッサ51を、複数のプロセッサにより実現するようにしてもよい。この場合、例えば、上述したマスタ装置やスレーブ装置としての動作を制御する機能(図中における「動作制御部511」や「パラメータ取得部512」に相当)と、これと協働して医療機器制御処理を行う機能(図中における「状態検出部513」や「通知部514」に相当)とを、それぞれ別のプロセッサにより実現してもよい。さらに、この場合、プロセッサは、情報演算処理装置単体によって構成されるものの他、これら演算処理装置と、ASIC(Application Specific Integrated Circuit)又はFPGA(Field-Programmable Gate Array)等の処理回路を含むものであってもよい。さらに、この場合、ROM52やRAM53等は、プロセッサ毎にそれぞれ設けられていてもよい。すなわち、情報処理ユニット50を、例えば、マスタ装置やスレーブ装置としての動作を制御するユニット(例えば、力・触覚伝達制御用の集積回路)と、医療機器制御処理を行うユニット(例えば、医療機器制御処理用のプログラムを組み込んだパーソナルコンピュータ)というように、複数のユニットに分散して実現してもよい。また、
ドライブ58には、磁気ディスク、光ディスク、光磁気ディスク、あるいは半導体メモリ等よりなる、リムーバブルメディア(図示を省略する。)が適宜装着される。ドライブ58よってリムーバブルメディアから読み出されたプログラムは、必要に応じて記憶部55にインストールされる。
また、このようなハードウェア構成において、医療機器制御処理を実現する場合、図8に示すように記憶部55の一領域には、パラメータ記憶部551が設定される。
以下で特に言及しない場合も含め、これら機能ブロック間では、処理を実現するために必要なデータを、適切なタイミングで適宜送受信する。
また、上述したように、貫通時には、位置を示す値についても大きく変動するので、力を示す値ではなく、位置を示す値について閾値を設定して貫通を検出するようにしてもよい。
このような、通知部514の通知によれば、力触覚に関する制御パラメータを、定量的なデータとしてユーザに通知して、ユーザによる解析を補助することが可能となる。例えば、ユーザによる、切削層識別や生体の力学性情報の解析を補助することが可能となる。
本実施形態に係る医療機器1aが実行する医療機器制御処理の処理内容について、図8のフローチャートを参照して説明する。図8は、医療機器制御処理の流れを説明するフローチャートである。医療機器制御処理は、ユーザによる、医療機器1aを用いた施術の開始に伴い実行される。
また、医療機器制御処理によれば、この適切な情報に基づいてより精度高く施術を抑制するような動作制御を行ったり、ユーザに対してこの適切な情報を通知したりすることもできる。
次に、第2の実施形態について説明をする。ここで、以下の第2の実施形態の説明及び第3の実施形態の説明では、上述した第1の実施形態と相違する点について詳細に説明する一方で、第1の実施形態と共通する点については、重複する再度の説明を省略する。例えば、第1の実施形態と同様の符号が付された構成要素の詳細や、上述した[制御対象装置に対する動作制御]における基本的原理や、情報処理ユニット50が備える各機能ブロックの機能や、[医療機器制御処理]の処理内容等について、第1の実施形態と共通する点については、重複する再度の説明を省略する。
すなわち、医療機器1bの構成によっても、医療機器1aと同様の効果を奏することが可能となる。
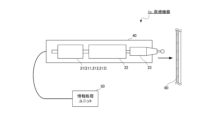
次に、第3の実施形態について説明をする。図10は、本実施形態に係る医療機器1cの基本的構成を示す模式図である。なお、図1及び図9と同様に、図10においては、施術を行う際の医療機器1cの移動方向(図中では矢印にて表す)を正面とした場合の、医療機器1cの側面図が模式的に示されると共に、筐体40を透過して内部構成が示されている。また、これも図1及び図9と同様に、図10においては、筐体40に有線接続されている情報処理ユニット50と、施術の対象となる施術対象部位60と、についても模式的に示されている。
一方で、医療機器1cでは、医療機器1aと異なり、マスタ側ユニット11(マスタ側ドライバ111、マスタ側アクチュエータ112、マスタ側位置センサ113を含む)、スイッチ12、及びスイッチレバー13は、省略される。
すなわち、医療機器cの構成によっても、医療機器1aや医療機器1bと同様の効果を奏することが可能となる。
以上、本発明の実施形態について説明したが、この実施形態は例示に過ぎず、本発明の技術的範囲を限定するものではない。本発明は、本発明の要旨を逸脱しない範囲で、その他の様々な実施形態を取ることが可能である共に、省略及び置換等種々の変形を行うことができる。この場合に、これら実施形態及びその変形は、本明細書等に記載された発明の範囲及び要旨に含まれると共に、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
一例として、以上説明した本発明の実施形態を、以下のようにして変形してもよい。
施術機構80は、患者に対する施術用の機構である。
スレーブ側アクチュエータ212は、施術機構80に施術を行わせる。
動作制御部511は、施術に伴い検出された位置に関する情報に基づいて、力触覚に関する制御パラメータを算出すると共に、該力触覚に関する制御パラメータに基づいて、スレーブ側アクチュエータ212による施術機構80に施術を行わせるための動作を制御する。
パラメータ取得部512は、力触覚に関する制御パラメータを取得する。
操作機構70は、操作者の操作を受け付ける機構である。
マスタ側アクチュエータ112は、操作機構70に操作反力を付与する。
この場合、動作制御部511は、力触覚に関する制御パラメータに基づいて、マスタ側アクチュエータ112による操作機構70に操作反力を付与するための動作を制御すると共に、力触覚に関する制御パラメータに基づいて、スレーブ側アクチュエータ212とマスタ側アクチュエータ112との間で、力触覚を相互に伝達する。
これにより、力触覚を伝達するというバイラテラル制御を実現することで、操作者が利用する操作機構に対して操作反力を付与することができる。
この場合、動作制御部511は、推進力を付与するアクチュエータをスレーブ側アクチュエータ212として制御する。
これにより、力触覚に関するパラメータとして、施術対象の部位方向への推進力に関する力触覚に関するパラメータを取得することができる。
動作制御部511は、施術機構80に、施術対象の部位方向への推進力、又は回転力の何れかを付与するアクチュエータをスレーブ側アクチュエータ212として制御する。
これにより、力触覚に関するパラメータとして、施術機構に付与される推進力又は回転力の何れかに関する力触覚に関するパラメータを取得することができる。
状態検出部513は、パラメータ取得部512が取得した力触覚に関する制御パラメータに基づいて、施術機構80による施術の状態が所定の状態であることを検出する。
動作制御部511は、状態検出部513が所定の状態であることを検出した場合に、施術機構80が行う施術を抑制する。
これにより、施術を抑制すべき状態等を検出した場合に、施術を抑制する制御を行うことができる。
この場合、状態検出部513は、力触覚に関する制御パラメータに基づいて、施術機構が受けた施術対象部位からの反力を検出すると共に、該反力の時系列に沿った変動に基づいて、施術機構が施術対象部位を貫通したことを、所定の状態として検出する。
これにより、施術対象部位を貫通した場合に、施術を抑制する制御を行うことができる。
上述した実施形態による一連の処理を実行させる機能は、ハードウェアにより実現することもできるし、ソフトウェアにより実現することもできるし、これらの組み合わせにより実現することもできる。換言すると、上述した一連の処理を実行する機能が、各実施形態に係る医療機器1の何れかにおいて実現されていれば足り、この機能をどのような態様で実現するのかについては、特に限定されない。
Claims (6)
- 操作者の操作を受け付ける操作機構と、
前記操作機構に操作反力を付与する操作用アクチュエータと、
患者の施術対象部位の切削を伴う施術用の施術機構と、
前記施術機構に施術を行わせる施術用アクチュエータと、
動作制御手段であって、
前記施術に伴い検出された位置に関する情報に基づいて、力触覚に関する制御パラメータを算出すると共に、
前記力触覚に関する制御パラメータに基づいて、前記施術用アクチュエータによる前記施術機構に施術を行わせるための動作を制御し、
前記力触覚に関する制御パラメータに基づいて、前記操作用アクチュエータによる前記操作機構に操作反力を付与するための動作を制御し、
前記力触覚に関する制御パラメータに基づいて、前記施術用アクチュエータと前記操作用アクチュエータとの間で、力触覚を相互に伝達する、
動作制御手段と、
前記動作制御手段が前記操作用アクチュエータによる前記操作機構に操作反力を付与するための動作を制御するために用いる前記力触覚に関する制御パラメータを取得するパラメータ取得手段と、
前記パラメータ取得手段が取得した前記力触覚に関する制御パラメータの時系列に沿った変動に基づいて、前記施術機構が前記施術対象部位を貫通したことを検出する状態検出手段と、
を備え、
前記動作制御手段は、前記状態検出手段が前記貫通したことを検出した場合に、前記施術機構が行う施術対象部位の切削を抑制する、
ことを特徴とする医療用ドリル。 - 前記動作制御手段が行う、施術対象部位の切削を抑制するとは、前記力触覚の伝達を停止すると共に、前記操作者による操作機構の操作に関わらず、前記施術機構の位置を固定する制御を行うことである、
ことを特徴とする請求項1に記載の医療用ドリル。 - 前記施術対象部位の方向への推進力を付与する第1のアクチュエータと、
前記施術対象部位の方向への推進力を付与する第2のアクチュエータと、
を備えると共に、
前記動作制御手段は、前記第1のアクチュエータを前記操作用アクチュエータとし、前記第2のアクチュエータを前記施術用アクチュエータとして制御する、
ことを特徴とする請求項1又は2に記載の医療用ドリル。 - 前記制御パラメータは、前記操作用アクチュエータに関する、力を示す値および位置を示す値の何れか又は双方であり、
前記状態検出手段は、前記力を示す値および前記位置を示す値の何れか又は双方について、単位時間あたりの変動量を算出し、直近の単位時間あたりの変動量が所定の閾値以上に大きい場合に、前記施術機構が前記施術対象部位を貫通したことを検出する、
ことを特徴とする請求項1乃至3の何れか1項に記載の医療用ドリル。 - 前記施術機構に、施術対象部位方向への推進力、又は回転力の何れかを付与するアクチュエータを備え、
前記動作制御手段は、前記施術対象部位方向への推進力、又は回転力の何れかを付与するアクチュエータを前記施術用アクチュエータとして制御する、
ことを特徴とする請求項1又は2に記載の医療用ドリル。 - 操作者の操作を受け付ける操作機構と、前記操作機構に操作反力を付与する操作用アクチュエータと、患者の施術対象部位の切削を伴う施術用の施術機構と、前記施術機構に施術を行わせる施術用アクチュエータと、を備える医療用ドリルに関する処理を行う医療用プログラムであって、
動作制御機能であって、
前記施術に伴い検出された位置に関する情報に基づいて、力触覚に関する制御パラメータを算出すると共に、
前記力触覚に関する制御パラメータに基づいて、前記施術用アクチュエータによる前記施術機構に施術を行わせるための動作を制御し、
前記力触覚に関する制御パラメータに基づいて、前記操作用アクチュエータによる前記操作機構に操作反力を付与するための動作を制御し、
前記力触覚に関する制御パラメータに基づいて、前記施術用アクチュエータと前記操作用アクチュエータとの間で、力触覚を相互に伝達する、
動作制御機能と、
前記動作制御機能が前記操作用アクチュエータによる前記操作機構に操作反力を付与するための動作を制御するために用いる前記力触覚に関する制御パラメータを取得するパラメータ取得機能と、
前記パラメータ取得機能が取得した前記力触覚に関する制御パラメータの時系列に沿った変動に基づいて、前記施術機構が前記施術対象部位を貫通したことを検出する状態検出機能と、
をコンピュータに実現させると共に、
前記動作制御機能は、前記状態検出機能が前記貫通したことを検出した場合に、前記施術機構が行う施術対象部位の切削を抑制する、
ことを特徴とする医療用プログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020064687A JP7679178B2 (ja) | 2020-03-31 | 2020-03-31 | 医療用ドリル、及び医療用プログラム |
| EP21781401.1A EP4129228A4 (en) | 2020-03-31 | 2021-03-29 | MEDICAL DEVICE AND MEDICAL PROGRAM |
| US17/915,913 US20230143373A1 (en) | 2020-03-31 | 2021-03-29 | Medical apparatus and medical storage medium |
| PCT/JP2021/013428 WO2021200881A1 (ja) | 2020-03-31 | 2021-03-29 | 医療機器、及び医療用プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020064687A JP7679178B2 (ja) | 2020-03-31 | 2020-03-31 | 医療用ドリル、及び医療用プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021159364A JP2021159364A (ja) | 2021-10-11 |
| JP7679178B2 true JP7679178B2 (ja) | 2025-05-19 |
Family
ID=77928887
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020064687A Active JP7679178B2 (ja) | 2020-03-31 | 2020-03-31 | 医療用ドリル、及び医療用プログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230143373A1 (ja) |
| EP (1) | EP4129228A4 (ja) |
| JP (1) | JP7679178B2 (ja) |
| WO (1) | WO2021200881A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12285862B2 (en) * | 2019-02-07 | 2025-04-29 | Keio University | Position/force controller, and position/force control method and storage medium |
| WO2024248113A1 (ja) * | 2023-05-30 | 2024-12-05 | 地方独立行政法人神奈川県立産業技術総合研究所 | 医療機器、及び医療用プログラム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007005367A2 (en) | 2005-06-30 | 2007-01-11 | Intuitive Surgical, Inc | Robotic image guided catheter-based surgical devices and techniques |
| US20130211418A1 (en) | 2012-02-10 | 2013-08-15 | Samsung Electronics Ltd., Co. | Apparatus and method for tactile feedback |
| WO2015041046A1 (ja) | 2013-09-19 | 2015-03-26 | 学校法人慶應義塾 | 位置・力制御装置、位置・力制御方法及びプログラム |
| JP5692702B2 (ja) | 2011-02-04 | 2015-04-01 | 学校法人日本大学 | 外科用開孔装置 |
| WO2018061683A1 (ja) | 2016-09-30 | 2018-04-05 | ソニー株式会社 | 力覚提示装置 |
| WO2019039612A2 (ja) | 2017-08-21 | 2019-02-28 | 地方独立行政法人神奈川県立産業技術総合研究所 | 鉗子システム |
| WO2020008807A1 (ja) | 2018-07-06 | 2020-01-09 | 地方独立行政法人神奈川県立産業技術総合研究所 | 医療用把持装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5339799A (en) * | 1991-04-23 | 1994-08-23 | Olympus Optical Co., Ltd. | Medical system for reproducing a state of contact of the treatment section in the operation unit |
| JP2004298559A (ja) | 2003-04-01 | 2004-10-28 | Olympus Corp | 外科手術装置 |
| JP6234643B2 (ja) * | 2015-07-23 | 2017-11-22 | オリンパス株式会社 | 医療システム及びその作動方法 |
-
2020
- 2020-03-31 JP JP2020064687A patent/JP7679178B2/ja active Active
-
2021
- 2021-03-29 WO PCT/JP2021/013428 patent/WO2021200881A1/ja not_active Ceased
- 2021-03-29 US US17/915,913 patent/US20230143373A1/en active Pending
- 2021-03-29 EP EP21781401.1A patent/EP4129228A4/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007005367A2 (en) | 2005-06-30 | 2007-01-11 | Intuitive Surgical, Inc | Robotic image guided catheter-based surgical devices and techniques |
| JP5692702B2 (ja) | 2011-02-04 | 2015-04-01 | 学校法人日本大学 | 外科用開孔装置 |
| US20130211418A1 (en) | 2012-02-10 | 2013-08-15 | Samsung Electronics Ltd., Co. | Apparatus and method for tactile feedback |
| WO2015041046A1 (ja) | 2013-09-19 | 2015-03-26 | 学校法人慶應義塾 | 位置・力制御装置、位置・力制御方法及びプログラム |
| WO2018061683A1 (ja) | 2016-09-30 | 2018-04-05 | ソニー株式会社 | 力覚提示装置 |
| WO2019039612A2 (ja) | 2017-08-21 | 2019-02-28 | 地方独立行政法人神奈川県立産業技術総合研究所 | 鉗子システム |
| WO2020008807A1 (ja) | 2018-07-06 | 2020-01-09 | 地方独立行政法人神奈川県立産業技術総合研究所 | 医療用把持装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4129228A1 (en) | 2023-02-08 |
| EP4129228A4 (en) | 2024-04-24 |
| US20230143373A1 (en) | 2023-05-11 |
| WO2021200881A1 (ja) | 2021-10-07 |
| JP2021159364A (ja) | 2021-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Okamura et al. | The haptic scissors: Cutting in virtual environments | |
| JP6049788B2 (ja) | 仮想道具操作システム | |
| Tholey et al. | Force feedback plays a significant role in minimally invasive surgery: results and analysis | |
| Kasahara et al. | Telerobotic‐assisted bone‐drilling system using bilateral control with feed operation scaling and cutting force scaling | |
| EP0732082A2 (en) | Remote surgery support system | |
| KR102149008B1 (ko) | 수술용 로봇의 충돌을 완화시키는 방법 및 시스템 | |
| JP7679178B2 (ja) | 医療用ドリル、及び医療用プログラム | |
| JP6762280B2 (ja) | 鉗子システム | |
| Colan et al. | Tactile Feedback in Robot‐Assisted Minimally Invasive Surgery: A Systematic Review | |
| Díaz et al. | A haptic pedal for surgery assistance | |
| Yamanouchi et al. | Validation of a surgical drill with a haptic interface in spine surgery | |
| Chial et al. | On the display of haptic recordings for cutting biological tissues | |
| Rosenberg et al. | A haptic interface for virtual simulation of endoscopic surgery | |
| Wagner et al. | Force feedback in a three-dimensional ultrasound-guided surgical task | |
| Servais et al. | Novel force feedback technology improves suturing in robotic-assisted surgery: a pre-clinical study | |
| Khwanngern et al. | Jaw surgery simulation in virtual reality for medical training | |
| WO2024248113A1 (ja) | 医療機器、及び医療用プログラム | |
| Guo et al. | A method of decreasing time delay for a tele-surgery system | |
| Busque et al. | Preliminary Assessment of a Laparoscopic Training System Using Magneto-Rheological Clutches and Virtual Reality | |
| Barbé et al. | Bilateral controllers for teleoperated percutaneous interventions: evaluation and improvements | |
| Rovers | Haptic feedback: a literature study on the present-day use of haptic feedback in medical robotics | |
| JP7730107B2 (ja) | 習得支援システム、習得支援方法、及び習得支援プログラム | |
| WO2023074336A1 (ja) | 補償システム、補償装置、補償方法及びプログラム | |
| JP2022009382A (ja) | ジョイント構造物 | |
| WO2023074334A1 (ja) | 制御システム、制御装置、制御方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240423 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240624 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250408 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7679178 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |