JP7552002B2 - 光レベル適応フィルタ及び方法 - Google Patents
光レベル適応フィルタ及び方法 Download PDFInfo
- Publication number
- JP7552002B2 JP7552002B2 JP2021071592A JP2021071592A JP7552002B2 JP 7552002 B2 JP7552002 B2 JP 7552002B2 JP 2021071592 A JP2021071592 A JP 2021071592A JP 2021071592 A JP2021071592 A JP 2021071592A JP 7552002 B2 JP7552002 B2 JP 7552002B2
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- noise
- frame
- signal level
- filter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
- H04N23/81—Camera processing pipelines; Components thereof for suppressing or minimising disturbance in the image signal generation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/10—Image enhancement or restoration using non-spatial domain filtering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/20—Image enhancement or restoration using local operators
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20004—Adaptive image processing
- G06T2207/20012—Locally adaptive
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20024—Filtering details
- G06T2207/20028—Bilateral filtering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20182—Noise reduction or smoothing in the temporal domain; Spatio-temporal filtering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20192—Edge enhancement; Edge preservation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20224—Image subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Health & Medical Sciences (AREA)
- Image Processing (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Studio Devices (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Endoscopes (AREA)
- Biomedical Technology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Molecular Biology (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Medical Informatics (AREA)
- Closed-Circuit Television Systems (AREA)
- Picture Signal Circuits (AREA)
- Gynecology & Obstetrics (AREA)
- Radiology & Medical Imaging (AREA)
Description
本特許出願は、2016年1月29日に出願された、”LIGHT LEVEL ADAPTIVE FILTER AND METHOD”という表題の米国仮特許出願第62/288,956号について優先権及び出願日の利益を主張するものであり、この文献はその全体が参照により本明細書に組み込まれる。

ここで、
は、位置xにおける画素の適応空間ノイズフィルタ処理された信号レベルであり、
は、正規化定数であり、
は、空間的なガウス分布であり、
は、位置yの画素と位置xの画素との間の距離のノルムであり、
は、距離パラメータであり、
は、位置xにおける画素のノイズの関数である信号レベル範囲のガウス分布であり、
は、位置yにおける画素の信号レベルであり、
は、位置xにおける画素の信号レベルであり、

は、位置yにおける画素(第2の画素)の信号レベルと位置xにおける画素(第1の画素)の信号レベルとの差の絶対値であり、

は、位置xにおける画素のノイズの関数である信号レベルレンジパラメータであり、
は、位置xに中心画素を有する画素のブロックであり、
は、位置xに中心画素を有する画素ブロック内の画素に亘る総和を表す。

ここで、
std(Noise)は、画素のノイズの標準偏差であり、
Oは、センサの電気ノイズによるオフセットであり、
Gは、ゲイン値であり、
SignalLevelは、画像取込みセンサによって読み取られる画素信号レベルであり、
MaxSignalLevelは、画像取込みセンサの最大画素信号レベルである。
ここで、画素信号レベル(SignalLevel)は、画像取込みセンサの画素に入射する光の尺度である。上の式は、低画素信号レベルでは、ノイズが高画素信号レベルよりもはるかに小さいことを示している。しかしながら、低信号レベルでは、ノイズは高信号レベルよりも信号のはるかに大きな部分を占める。
std(第1の画素のノイズ)=2+40*(6/4095)**.5=3.5
std(第2の画素のノイズ)=2+40*(4000/4095)**.5=41.5
to Noise Look-up Table)306(図3B参照)、及び信号レベル対ノイズ・ルックアップテーブル(signal level to noise look-up table)306は全て同じ要素である。)

ここで、
は、フレーム内の位置xにおける画素のフィルタ処理された信号レベルである。
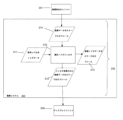
適応空間ノイズフィルタ570は、現在の画素をどの様にフィルタ処理するかを決定するために、現在の画素の周りの正方形の画素のブロック、例えば、複数の隣接画素を使用する。距離フィルタ(Distance Filter)は、現在の画素からのブロック内の隣接画素のユークリッド距離から決定された重みに基づいて、現在の画素をフィルタ処理する。信号レンジフィルタ(時には、レンジフィルタ(Range Filter)又は強度フィルタとも呼ばれる)は、フィルタ処理される画素に対応するフレーム(imNoiseY)内の画素ノイズの値に基づく適応ノイズ信号レンジフィルタである。こうして、レンジフィルタで使用される重みは、ブロック内の隣接画素と現在の画素との間の信号レベルの差だけでなく、現在の画素のノイズ成分にも基づく。入力画素フレーム内の現在の画素の位置と同じ位置にある画素ノイズ入力フレームの画素ノイズは、現在の画素に対応すると言われ、時には、現在の画素のノイズ成分と呼ばれることもある。

ここで、

は、位置xにおける画素のフィルタ処理された信号レベルであり、
は、正規化定数であり、
は、空間的なガウス分布であり、
は、位置yの画素と位置xの画素との間の距離のノルム(norm)であり、
は、通常1~10の範囲の距離パラメータであり、
は、位置xにおける現在の画素のノイズの関数である信号レベル範囲のガウス分布(signal level range Gaussian distribution)であり、
は、位置yにおける画素の信号レベルであり、
は、位置xにおける画素の信号レベルであり、
は、位置yにおける画素の信号レベルと位置xにおける画素の信号レベルとの差の絶対値であり、

は、位置xにおける画素のノイズの関数である信号レベルレンジパラメータであり、
は、位置xに中心画素を有する画素のブロックであり、
は、位置xに中心画素を有する画素ブロック内の画素に亘る総和を表す。
位置x及び位置yは、画素のブロック内の位置を指定し、各位置は2つの座標によって表されることに留意されたい。




sigmaD = 1 “距離フィルタのシグマ値”
I = [5, 5] “ブロックのサイズを規定する”
distFilt = fspecial('gausian',[5, 5], 10) “ブロック内の各位置について距離フィルタを評価する”
cp = I(3, 3) “中心画素を規定する”
diff = I-cp “各画素と中心画素との間の信号レベル差”
np = location of cp in noise frame “中心画素に対応する画素ノイズを規定する”
sigmaR = lookup (np) “中心画素に対応するノイズ画素の関数としてSigmaRを取得する”
rangeFilt = exp(-diff.^2/2*sigmaR^2))) “ブロック内の各位置の範囲フィルタを評価する”
combFilt = rangeFilt. * distFilt “範囲フィルタの各要素に、距離フィルタの対応する要素を乗算する”
sumFilt = sum(combFilt(:)) “結合フィルタの値を合計する”
combFiltNorm = comFilt./sumFilt “結合フィルタの各値を正規化係数で除算する”
appliedFilter = I. * comFiltNorm “ブロック内の各画素に正規化結合フィルタを乗算する”
newValue = sum(appliedFilter(:)) “フィルタ処理された中心画素は、適用されたフィルタの値の合計である”
一態様では、適応空間ノイズフィルタは、コンピュータプログラミング言語で書かれ、撮像パイプライン内のプロセッサ上で実行可能な実行可能モジュールにコンパイルされる。あるいはまた、適応空間フィルタは、ハードウェア、ファームウェア、或いはハードウェア、ファームウェアの任意の組合せ、並びにプロセッサ及び実行可能モジュールの組合せで実装することができる。例えば、図6Bを参照されたい。
[実施例1]
システムであって、当該システムは、
画素データの第1のフレームを取り込むように構成された画像センサと、
前記画素データの第1のフレームを受信するように前記画像センサに結合された撮像パイプラインであって、該撮像パイプラインは適応ノイズフィルタを含み、該適応ノイズフィルタは、
第1の画素の推定画素ノイズパラメータを用い、且つ前記第1の画素の信号レベルと少なくとも第2の画素の信号レベルとの間の差を用いて前記第1の画素をフィルタ処理し、
前記フィルタ処理された第1の画素を含む画素データの第2のフレームを出力するように構成され、
前記撮像パイプラインは、前記画素データの第2のフレームに基づいて画素データの出力フレームを出力するように構成される、撮像パイプラインと、
該撮像パイプラインに結合され、前記画素データの出力フレームを受信するディスプレイ装置であって、前記画素データの出力フレームを表示するように構成されたディスプレイ装置と、を有する、
システム。
[実施例2]
前記適応ノイズフィルタは、適応時間ノイズフィルタを含み、前記第2の画素は、前記第1のフレーム内の前記第1の画素の位置と同じ、前記画像センサによって取り込まれた第3のフレームの内の位置にあり、前記第3のフレームは、前記第1のフレームを取込む前の時間に取り込まれ、前記適応時間ノイズフィルタは、前記第1及び第2の画素の信号レベルの変化と前記第1の画素の推定画素ノイズレベルとの比較に基づいて、前記第1の画素をフィルタ処理するように構成され、前記推定画素ノイズレベルは、推定画素ノイズパラメータである、実施例1に記載のシステム。
[実施例3]
前記撮像パイプラインは複数のステージを含み、前記適応時間ノイズフィルタは前記複数のステージのうちの第1のステージに含まれる、実施例2に記載のシステム。
[実施例4]
前記適応時間ノイズフィルタは、画素ノイズフレームを出力するように構成される、実施例2に記載のシステム。
[実施例5]
前記撮像パイプラインは複数のステージを含み、前記複数のステージのうちの第1のステージに続く前記複数のステージのそれぞれは、入力画素ノイズフレームを処理するように構成され、且つステージ依存画素ノイズフレームを出力するように構成される、実施例4に記載のシステム。
[実施例6]
前記適応ノイズフィルタは、適応空間ノイズフィルタを含み、前記少なくとも1つの第2の画素は、前記第1の画素に隣接する複数の画素に含まれ、前記適応空間ノイズフィルタは、前記第1の画素の信号レベルと前記複数の隣接する画素の信号レベルのそれぞれとの間の差に基づいて、及びノイズ依存信号レベルパラメータに基づいて、第1の画素をフィルタ処理するように構成され、前記ノイズ依存信号レベルパラメータは、前記第1の画素のノイズの関数であり、前記ノイズ依存信号レベルパラメータは、前記第1の画素の前記推定画素ノイズパラメータである、実施例1に記載のシステム。
[実施例7]
前記適応空間ノイズフィルタは、距離フィルタ及び信号レベルレンジフィルタを含み、前記信号レベルレンジフィルタは、前記第1の画素の信号レベルと前記複数の隣接する画素の前記信号レベルのそれぞれとの間の差に基づいて、前記第1の画素をフィルタ処理するように構成される、実施例6に記載のシステム。
[実施例8]
前記ノイズ依存信号レベルパラメータは、信号レベルレンジパラメータである、実施例6に記載のシステム。
[実施例9]
撮像パイプラインステージであって、当該撮像パイプラインステージは、
信号レベル対ノイズ・ルックアップテーブルを含む適応時間ノイズフィルタを有しており、
該適応時間ノイズフィルタは、
画素のフレームを受信し、
前記画素の信号レベルの時間変化を、前記画素の信号レベルに対応する前記信号レベル対ノイズ・ルックアップテーブルの値と比較することによって、前記フレームの複数の画素の各画素をフィルタ処理し、
前記比較に基づいて、適応時間ノイズフィルタ処理された複数の画素を含むフレームを出力するように構成される、
撮像パイプラインステージ。
[実施例10]
前記信号レベル対ノイズ・ルックアップテーブルは、現在の画素フレームの画素の値を受け取り、前記画素の前記信号レベルに対応するノイズ標準偏差を出力するように構成される、実施例9に記載の撮像パイプラインステージ。
[実施例11]
前記適応時間ノイズフィルタは、変更ルックアップテーブルをさらに有し、前記変更ルックアップテーブルは、ノイズ標準偏差の数値で表される画素の時間的な信号変化を受け取り、且つ前記画素の前記信号レベルの許容される時間変化の割合を出力するように構成される、実施例9に記載の撮像パイプラインステージ。
[実施例12]
前記適応時間ノイズフィルタは、画素ノイズフレームを出力するように構成される、実施例9に記載の撮像パイプラインステージ。
[実施例13]
撮像パイプラインステージであって、当該撮像パイプラインステージは、
適応空間ノイズフィルタを有しており、
該適応空間ノイズフィルタは、
入力画素フレームと入力画素ノイズフレームとを受信し、
画素の信号レベルと複数の隣接する画素の信号レベルのそれぞれとの間の差に基づいて、及びノイズ依存信号レベルパラメータに基づいて前記入力画素フレームの画素をフィルタ処理して、適応空間ノイズフィルタ処理された画素を生成することであって、前記ノイズ依存信号レベルパラメータは、前記画素に対応する前記入力画素ノイズフレーム内の画素ノイズを用いて決定される、生成し、
前記適応空間ノイズフィルタ処理された画素を適応空間ノイズフィルタ処理された画素フレームに出力するように構成される、
撮像パイプラインステージ。
[実施例14]
前記適応空間ノイズフィルタは、適応空間ノイズ・バイラテラルフィルタを含む、実施例13に記載の撮像パイプラインステージ。
[実施例15]
前記画素は、位置xにおける画素であり、適応空間ノイズ・バイラテラルフィルタは、以下のように規定され、

ここで、
は、位置xにおける前記画素の適応空間ノイズフィルタ処理された信号レベルであり、
は、正規化定数であり、
は、空間的なガウス分布であり、
は、前記位置yの画素と前記位置xの画素との間の距離のノルムであり、
は、距離パラメータであり、

は、前記画素のノイズの関数である信号レベル範囲のガウス分布であり、
は、前記位置yにおける前記画素の信号レベルであり、
は、前記位置xにおける前記画素の信号レベルであり、

は、前記位置yにおける前記画素の信号レベルと前記位置xにおける画素の信号レベルとの差の絶対値であり、
は、前記位置xにおける前記画素のノイズの関数である信号レベルレンジパラメータであり、
は、前記位置xに中心画素を有する画素のブロックであり、
は、前記位置xに中心画素を有する画素ブロック内の画素に亘る総和を表す、実施例13に記載の撮像パイプラインステージ。
[実施例16]
方法であって、当該方法は、
第1のフレームの第1の画素を受信するステップと、
前記第1の画素の推定画素ノイズパラメータを用いて、且つ前記第1の画素の信号レベルと少なくとも第2画素の信号レベルとの間の差を用いて、前記第1の画素を適応ノイズフィルタ処理して、フィルタ処理された画素を取得するステップと、
前記フィルタ処理された画素を出力フレームに出力するステップと、を含む、
方法。
[実施例17]
前記フィルタ処理された画素に対応する画素ノイズをノイズ出力フレームに出力するステップをさらに含む、実施例16に記載の方法。
[実施例18]
前記第2の画素は、前記第1のフレーム内の前記第1の画素の位置と同じ、画像センサによって取り込まれた第2のフレーム内の位置にあり、前記第2のフレームは、前記第1のフレームを取り込む前の時間に取り込まれ、前記第1の画素を適応ノイズフィルタ処理するステップは、前記第1及び第2の画素の信号レベルの変化と前記第1の画素の推定画素ノイズレベルとの比較に基づいて前記第1の画素を適応時間ノイズフィルタ処理するステップを含み、前記推定画素ノイズレベルは前記推定画素ノイズパラメータであり、前記第1及び第2の画素の信号レベルの変化は、前記第1の画素の前記信号レベルの時間変化である、実施例16に記載の方法。
[実施例19]
前記第1の画素を適応時間ノイズフィルタ処理するステップは、
前記第1の画素の信号レベルを信号レベル対ノイズ・ルックアップテーブルに入力するステップと、
前記信号レベル対ノイズ・ルックアップテーブルを用いて、前記第1の画素の信号レベルに対応するノイズ標準偏差を出力するステップであって、前記ノイズ標準偏差は、前記第1の画素の前記推定画素ノイズレベルである、出力するステップと、を含む、実施例18に記載の方法。
[実施例20]
前記第1の画素を適応時間ノイズフィルタ処理するステップは、
前記第1の画素の前記信号レベルの前記時間変化を前記ノイズ標準偏差で除算して、前記第1の画素の前記信号レベルの時間変化をノイズの標準偏差として取得するステップであって、前記除算は前記比較である、取得するステップをさらに含む、実施例19に記載の方法。
[実施例21]
前記第1の画素を適応時間ノイズフィルタ処理するステップは、
前記第1の画素の前記信号レベルの時間変化をノイズの標準偏差で変更ルックアップテーブルに入力するステップと、
前記変更ルックアップテーブルを用いて、前記フィルタを通過する前記第1の画素の信号レベルの許容される時間変化の割合を出力するステップと、をさらに含む、実施例20に記載の方法。
[実施例22]
前記第1の画素を適応時間ノイズフィルタ処理するステップは、
前記第1の画素の前記信号レベルの許容される時間変化の割合に、前記第1の画素の前記信号レベルの前記時間変化を乗算することによって、前記第1の画素の前記信号レベルの許容される時間変化を生成するステップと、
前記第1の画素の前記信号レベルにおける前記許容される時間変化を対応する画素に加算することによって、前記フィルタ処理された画素を生成するステップであって、前記対応する画素は、第2のフレーム内の画素であり、前記第2のフレームは、時間的に前記第1のフレームの直前にある、生成するステップと、をさらに含む、実施例21に記載の方法。
[実施例23]
前記少なくとも1つの第2の画素は、前記第1の画素に隣接する複数の画素に含まれ、前記第1の画素を適応ノイズフィルタ処理するステップは、前記第1の画素の信号レベルと前記複数の隣接する画素の信号レベルのそれぞれとの間の差に基づいて、及びノイズ依存信号レベルパラメータに基づいて、前記第1の画素を適応空間ノイズフィルタ処理するステップを含み、前記ノイズ依存信号レベルパラメータは、前記第1の画素のノイズの関数であり、前記ノイズ依存信号レベルパラメータは、前記第1の画素の推定画素ノイズパラメータである、実施例16に記載の方法。
[実施例24]
前記第1の画素を適応空間ノイズフィルタ処理するステップは、
距離フィルタと信号レベルフィルタとを組み合わせることによって前記フィルタ処理された画素を生成するステップであって、前記信号レベルフィルタは、前記ノイズ依存信号レベルパラメータの関数である、生成するステップを含む、実施例23に記載の方法。
[実施例25]
前記信号レベルフィルタは、信号レベルレンジパラメータを有する信号レベル範囲のガウス分布を含み、前記信号レベルレンジパラメータは、前記ノイズ依存信号レベルパラメータである、実施例24に記載の方法。
Claims (14)
- システムであって、当該システムは、
第1のフレームの画素データを取り込むように構成された画像センサと、
該画像センサに結合された適応ノイズフィルタと、を含み、
該適応ノイズフィルタは、
前記第1のフレームの画素データの第1の画素の信号レベルに基づいて推定画素ノイズパラメータを決定すること、
前記第1の画素の前記信号レベルと少なくとも第2の画素の信号レベルとの間の差を決定することであって、前記第2の画素は、前記第1のフレームの取込みの前に前記画像センサによって取り込まれた以前のフレームの位置と前記第1のフレームの前記第1の画素の位置とが同じ位置にある画素である、こと、
該差と前記推定画素ノイズパラメータとの比較結果に基づいて、前記適応ノイズフィルタを通過するのが許可される前記差の数量を決定すること、
前記適応ノイズフィルタを通過するのが許可される前記差の前記数量に基づいてフィルタ処理された画素を取得すること、及び
該フィルタ処理された画素を含む第2のフレームの画素データを出力すること、を行うように構成される、
システム。 - 前記適応ノイズフィルタに結合された第2の適応ノイズフィルタであって、前記フィルタ処理された画素の推定画素ノイズパラメータを使用し、且つ前記フィルタ処理された画素の信号レベルと少なくとも第3の画素の信号レベルとの間の差を使用して前記フィルタ処理された画素をフィルタ処理して、さらにフィルタ処理された画素を取得するように構成された第2の適応ノイズフィルタ、をさらに含み、
前記適応ノイズフィルタは適応時間ノイズフィルタであり、前記第2の適応ノイズフィルタは適応空間ノイズフィルタであり、
前記第2の適応ノイズフィルタは、前記さらにフィルタ処理された画素を含む第3のフレームの画素データを出力する、請求項1に記載のシステム。 - 前記適応ノイズフィルタは、前記フィルタ処理された画素に対応する画素ノイズをノイズ出力フレームに出力するように構成される、請求項2に記載のシステム。
- 前記第2の適応ノイズフィルタは、前記ノイズ出力フレーム内の前記フィルタ処理された画素に対応する前記画素ノイズに基づいて、前記フィルタ処理された画素の前記推定画素ノイズパラメータを決定するように構成される、請求項3に記載のシステム。
- 前記第1の画素の前記推定画素ノイズパラメータは、前記フィルタ処理された画素の前記推定画素ノイズパラメータとは異なる、請求項2乃至4のいずれか一項に記載のシステム。
- 前記フィルタ処理された画素の前記推定画素ノイズパラメータは、前記フィルタ処理された画素のノイズの関数である、請求項2乃至5のいずれか一項に記載のシステム。
- 前記適応ノイズフィルタは、前記第1の画素の前記信号レベルを受信し、且つ前記第1の画素の前記信号レベルに対応するノイズ標準偏差を出力するように構成された信号レベル対ノイズ・ルックアップテーブルを含み、前記ノイズ標準偏差は前記推定画素ノイズパラメータである、請求項1乃至6のいずれか一項に記載のシステム。
- 前記フィルタ処理された画素を取得することは、前記ノイズ標準偏差を使用して、前記第1の画素の前記信号レベルと、前記適応ノイズフィルタを通過することが許可される少なくとも前記第2の画素の前記信号レベルとの間の差の割合を決定することを含む、請求項7に記載のシステム。
- フレームの画素データの第1の画素を適応的にノイズフィルタ処理する方法であって、当該方法は、
前記第1の画素の信号レベルに基づいて推定画素ノイズパラメータを決定するステップと、
前記第1の画素の前記信号レベルと少なくとも第2の画素の信号レベルとの間の差を決定するステップであって、前記第2の画素は、第1のフレームの取込みの前に画像センサによって取り込まれた以前のフレームの位置と前記第1のフレームの前記第1の画素の位置とが同じ位置にある画素である、ステップと、
該差と前記推定画素ノイズパラメータとの比較結果に基づいて、適応ノイズフィルタを通過するのが許可される前記差の数量を決定するステップと、
前記適応ノイズフィルタを通過するのが許可される前記差の前記数量に基づいてフィルタ処理された画素を取得するステップと、
該フィルタ処理された画素をフィルタ処理された画素データの出力フレームに出力するステップと、を含む、
方法。 - 前記フィルタ処理された画素の推定画素ノイズパラメータを使用し、且つ前記フィルタ処理された画素の信号レベルと少なくとも第3の画素の信号レベルとの間の差を使用して、前記フィルタ処理された画素を適応的にノイズフィルタ処理して、さらにフィルタ処理された画素を取得するステップと、
該さらにフィルタ処理された画素をフィルタ処理された画素データの第2の出力フレームに出力するステップと、をさらに含む、請求項9に記載の方法。 - 前記フィルタ処理された画素に対応する画素ノイズを画素ノイズデータの出力フレームに出力するステップをさらに含む、請求項10に記載の方法。
- 前記画素ノイズデータの出力フレーム内の前記フィルタ処理された画素に対応する前記画素ノイズに基づいて、前記フィルタ処理された画素の前記推定画素ノイズパラメータを決定するステップをさらに含む、請求項11に記載の方法。
- 前記推定画素ノイズパラメータを決定するステップは、前記第1の画素の信号レベルを受信し、且つ前記第1の画素の前記信号レベルに対応するノイズ標準偏差を出力するように構成された信号レベル対ノイズ・ルックアップテーブルを使用するステップを含み、前記ノイズ標準偏差は前記推定画素ノイズパラメータである、請求項9乃至12のいずれか一項に記載の方法。
- 前記フィルタ処理された画素を取得するステップは、前記ノイズ標準偏差を使用して、前記第1の画素の前記信号レベルと、前記フィルタ処理された画素に通過することが許可される少なくとも前記第2の画素の前記信号レベルとの間の前記差の割合を決定するステップを含む、請求項13に記載の方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023101711A JP7571207B2 (ja) | 2016-01-29 | 2023-06-21 | 光レベル適応フィルタ及び方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662288956P | 2016-01-29 | 2016-01-29 | |
| US62/288,956 | 2016-01-29 | ||
| JP2018538098A JP6874009B2 (ja) | 2016-01-29 | 2017-01-27 | 光レベル適応フィルタ及び方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018538098A Division JP6874009B2 (ja) | 2016-01-29 | 2017-01-27 | 光レベル適応フィルタ及び方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023101711A Division JP7571207B2 (ja) | 2016-01-29 | 2023-06-21 | 光レベル適応フィルタ及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021119491A JP2021119491A (ja) | 2021-08-12 |
| JP7552002B2 true JP7552002B2 (ja) | 2024-09-18 |
Family
ID=59398803
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018538098A Active JP6874009B2 (ja) | 2016-01-29 | 2017-01-27 | 光レベル適応フィルタ及び方法 |
| JP2021071592A Active JP7552002B2 (ja) | 2016-01-29 | 2021-04-21 | 光レベル適応フィルタ及び方法 |
| JP2023101711A Active JP7571207B2 (ja) | 2016-01-29 | 2023-06-21 | 光レベル適応フィルタ及び方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018538098A Active JP6874009B2 (ja) | 2016-01-29 | 2017-01-27 | 光レベル適応フィルタ及び方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023101711A Active JP7571207B2 (ja) | 2016-01-29 | 2023-06-21 | 光レベル適応フィルタ及び方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (3) | US11017504B2 (ja) |
| JP (3) | JP6874009B2 (ja) |
| KR (2) | KR102632193B1 (ja) |
| WO (1) | WO2017132600A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11017504B2 (en) * | 2016-01-29 | 2021-05-25 | Intuitive Surgical Operations, Inc. | Light level adaptive filter and method |
| JP7169751B2 (ja) * | 2018-03-15 | 2022-11-11 | キヤノン株式会社 | 撮像素子およびそれを有する電子機器 |
| DE102019217220A1 (de) * | 2019-11-07 | 2021-05-12 | Siemens Healthcare Gmbh | Computerimplementiertes Verfahren zur Bereitstellung eines Ausgangsdatensatzes |
| US12033305B2 (en) | 2019-12-17 | 2024-07-09 | Stmicroelectronics (Grenoble 2) Sas | Filtering device, associated system and method |
| WO2021179045A1 (en) * | 2020-03-13 | 2021-09-16 | University Of South Australia | A data processing method |
| US11995156B2 (en) * | 2021-02-03 | 2024-05-28 | Samsung Electronics Co., Ltd. | Confidence aided upsampling of categorical maps |
| CN113009550A (zh) * | 2021-02-26 | 2021-06-22 | 山东省科学院海洋仪器仪表研究所 | 一种海水放射性核素能量谱的滤波方法 |
| CN116964620B (zh) * | 2021-03-03 | 2026-03-03 | 波士顿科学医学有限公司 | 内窥镜手术中干扰相减的图像增强的方法 |
| US11308349B1 (en) * | 2021-10-15 | 2022-04-19 | King Abdulaziz University | Method to modify adaptive filter weights in a decentralized wireless sensor network |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013175182A (ja) | 2012-02-22 | 2013-09-05 | Zakrytoe Akcionernoe Obshchestvo (Impul's) | デジタルx線フレームのノイズ低減方法 |
Family Cites Families (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6061100A (en) * | 1997-09-30 | 2000-05-09 | The University Of British Columbia | Noise reduction for video signals |
| US6804393B2 (en) * | 2001-01-02 | 2004-10-12 | Eastman Kodak Company | Method of calculating noise from a digital image utilizing color cross correlation statistics |
| US7110455B2 (en) * | 2001-08-14 | 2006-09-19 | General Instrument Corporation | Noise reduction pre-processor for digital video using previously generated motion vectors and adaptive spatial filtering |
| JP3934506B2 (ja) | 2002-08-06 | 2007-06-20 | オリンパス株式会社 | 撮像システムおよび画像処理プログラム |
| JP3934597B2 (ja) * | 2003-12-09 | 2007-06-20 | オリンパス株式会社 | 撮像システムおよび画像処理プログラム |
| KR100564592B1 (ko) * | 2003-12-11 | 2006-03-28 | 삼성전자주식회사 | 동영상 데이터 잡음제거방법 |
| WO2006010276A1 (en) | 2004-07-30 | 2006-02-02 | Algolith Inc | Apparatus and method for adaptive 3d artifact reducing for encoded image signal |
| US20060139494A1 (en) * | 2004-12-29 | 2006-06-29 | Samsung Electronics Co., Ltd. | Method of temporal noise reduction in video sequences |
| KR20060098939A (ko) * | 2005-03-09 | 2006-09-19 | 매그나칩 반도체 유한회사 | 노이즈 필터 |
| US7643699B2 (en) * | 2005-07-05 | 2010-01-05 | Hewlett-Packard Development Company, L.P. | Image processing based on local noise statistics |
| KR100735561B1 (ko) * | 2005-11-02 | 2007-07-04 | 삼성전자주식회사 | 이미지 센서로부터 발생되는 잡음을 저감하는 방법 및 장치 |
| KR101225056B1 (ko) * | 2006-01-27 | 2013-01-23 | 삼성전자주식회사 | 이미지 센서 노이즈 저감 장치 및 방법 |
| US7821578B2 (en) * | 2006-04-07 | 2010-10-26 | Marvell World Trade Ltd. | Reconfigurable self-calibrating adaptive noise reducer |
| JP2008205737A (ja) * | 2007-02-19 | 2008-09-04 | Olympus Corp | 撮像システム、画像処理プログラム、画像処理方法 |
| US8059207B2 (en) | 2007-02-23 | 2011-11-15 | Samsung Electronics Co., Ltd. | System and method for video noise reduction using an adaptive temporal method with motion detection and motion compensation |
| US8711249B2 (en) * | 2007-03-29 | 2014-04-29 | Sony Corporation | Method of and apparatus for image denoising |
| JP5052189B2 (ja) * | 2007-04-13 | 2012-10-17 | オリンパス株式会社 | 映像処理装置及び映像処理プログラム |
| JP4465002B2 (ja) * | 2007-11-16 | 2010-05-19 | オリンパス株式会社 | ノイズ低減システム、ノイズ低減プログラム及び撮像システム。 |
| US8149336B2 (en) * | 2008-05-07 | 2012-04-03 | Honeywell International Inc. | Method for digital noise reduction in low light video |
| KR101508386B1 (ko) * | 2008-09-29 | 2015-04-03 | 엘지전자 주식회사 | 움직임 적응적 잡음 제거 방법 및 그 장치 |
| JP5197414B2 (ja) * | 2009-02-02 | 2013-05-15 | オリンパス株式会社 | 画像処理装置及び画像処理方法 |
| JP5251637B2 (ja) * | 2009-03-16 | 2013-07-31 | 株式会社リコー | ノイズ低減装置、ノイズ低減方法、ノイズ低減プログラム、記録媒体 |
| US9225916B2 (en) * | 2010-03-18 | 2015-12-29 | Cisco Technology, Inc. | System and method for enhancing video images in a conferencing environment |
| US8471932B2 (en) | 2010-09-30 | 2013-06-25 | Apple Inc. | Spatial filtering for image signal processing |
| US9036695B2 (en) * | 2010-11-02 | 2015-05-19 | Sharp Laboratories Of America, Inc. | Motion-compensated temporal filtering based on variable filter parameters |
| JP5657375B2 (ja) * | 2010-12-24 | 2015-01-21 | オリンパス株式会社 | 内視鏡装置及びプログラム |
| CN102646265B (zh) * | 2011-02-22 | 2015-09-23 | 株式会社东芝 | 图像处理设备和方法 |
| GB2489272B (en) * | 2011-03-23 | 2013-03-13 | Toshiba Res Europ Ltd | An image processing system and method |
| KR101248808B1 (ko) * | 2011-06-03 | 2013-04-01 | 주식회사 동부하이텍 | 경계 영역의 잡음 제거 장치 및 방법 |
| US9215355B2 (en) | 2011-09-30 | 2015-12-15 | Apple Inc. | Scene adaptive temporal filtering |
| EA017302B1 (ru) * | 2011-10-07 | 2012-11-30 | Закрытое Акционерное Общество "Импульс" | Способ подавления шума серий цифровых рентгенограмм |
| TW201318418A (zh) * | 2011-10-26 | 2013-05-01 | Novatek Microelectronics Corp | 降低影像雜訊的方法及相關裝置 |
| US20130202079A1 (en) * | 2012-02-07 | 2013-08-08 | Lifeng Yu | System and Method for Controlling Radiation Dose for Radiological Applications |
| US9412155B2 (en) * | 2012-12-31 | 2016-08-09 | Karl Storz Imaging, Inc. | Video system with dynamic contrast and detail enhancement |
| CN103632352B (zh) * | 2013-11-01 | 2017-04-26 | 华为技术有限公司 | 一种噪声图像的时域降噪方法和相关装置 |
| US20170084007A1 (en) * | 2014-05-15 | 2017-03-23 | Wrnch Inc. | Time-space methods and systems for the reduction of video noise |
| US10614554B2 (en) * | 2015-04-16 | 2020-04-07 | Beijing Smartlogic Technology Ltd. | Contrast adaptive video denoising system |
| DE102015213911B4 (de) * | 2015-07-23 | 2019-03-07 | Siemens Healthcare Gmbh | Verfahren zum Erzeugen eines Röntgenbildes und Datenverarbeitungseinrichtung zum Ausführen des Verfahrens |
| US10269095B2 (en) * | 2015-08-31 | 2019-04-23 | Apple Inc. | Dynamically determining filtering strength for noise filtering in image processing |
| US11017504B2 (en) * | 2016-01-29 | 2021-05-25 | Intuitive Surgical Operations, Inc. | Light level adaptive filter and method |
| US10038862B2 (en) * | 2016-05-02 | 2018-07-31 | Qualcomm Incorporated | Methods and apparatus for automated noise and texture optimization of digital image sensors |
| US9979942B2 (en) * | 2016-06-30 | 2018-05-22 | Apple Inc. | Per pixel color correction filtering |
| GB2570528B (en) * | 2018-06-25 | 2020-06-10 | Imagination Tech Ltd | Bilateral filter with data model |
| US11915391B2 (en) * | 2020-03-26 | 2024-02-27 | Intel Corporation | Reduction of visual artifacts in images |
-
2017
- 2017-01-27 US US16/070,582 patent/US11017504B2/en active Active
- 2017-01-27 KR KR1020187021487A patent/KR102632193B1/ko active Active
- 2017-01-27 WO PCT/US2017/015485 patent/WO2017132600A1/en not_active Ceased
- 2017-01-27 KR KR1020247003174A patent/KR102761189B1/ko active Active
- 2017-01-27 JP JP2018538098A patent/JP6874009B2/ja active Active
-
2021
- 2021-04-21 US US17/236,765 patent/US11704774B2/en active Active
- 2021-04-21 JP JP2021071592A patent/JP7552002B2/ja active Active
-
2023
- 2023-05-31 US US18/203,789 patent/US20230325984A1/en active Pending
- 2023-06-21 JP JP2023101711A patent/JP7571207B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013175182A (ja) | 2012-02-22 | 2013-09-05 | Zakrytoe Akcionernoe Obshchestvo (Impul's) | デジタルx線フレームのノイズ低減方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102761189B1 (ko) | 2025-02-03 |
| JP2023120364A (ja) | 2023-08-29 |
| US20200211161A1 (en) | 2020-07-02 |
| KR102632193B1 (ko) | 2024-02-01 |
| US11704774B2 (en) | 2023-07-18 |
| JP2019512178A (ja) | 2019-05-09 |
| US20230325984A1 (en) | 2023-10-12 |
| US11017504B2 (en) | 2021-05-25 |
| US20210264570A1 (en) | 2021-08-26 |
| WO2017132600A1 (en) | 2017-08-03 |
| KR20180100150A (ko) | 2018-09-07 |
| JP6874009B2 (ja) | 2021-05-19 |
| JP2021119491A (ja) | 2021-08-12 |
| JP7571207B2 (ja) | 2024-10-22 |
| KR20240017978A (ko) | 2024-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7571207B2 (ja) | 光レベル適応フィルタ及び方法 | |
| US11750782B2 (en) | Endoscopic image enhancement using contrast limited adaptive histogram equalization (CLAHE) implemented in a processor | |
| JP6764574B2 (ja) | 画像処理装置、画像処理方法、プログラム、及び、手術システム | |
| US9986169B2 (en) | Exposure control method and system for an image capture device | |
| US20170046836A1 (en) | Real-time endoscopic image enhancement | |
| US9672596B2 (en) | Image processing apparatus to generate a reduced image of an endoscopic image | |
| US11936989B2 (en) | Apparatuses, systems, and methods for gaze-based auto-exposure management of image frames | |
| WO2016114155A1 (ja) | 画像処理装置、画像処理方法、プログラム、及び、内視鏡システム | |
| CN115812311A (zh) | 用于管理描绘颜色偏差内容的图像帧的自动曝光的装置、系统和方法 | |
| CN110678116B (zh) | 医疗系统和控制单元 | |
| CN112508797A (zh) | 用于图像中实时去雾的系统和方法 | |
| US11363245B2 (en) | Image processing device, image processing method, and image processing program | |
| EP4340696B1 (en) | Systems and methods for scene-adaptive image quality in surgical video | |
| WO2023054089A1 (ja) | 映像処理システム、並びに、医療情報処理システムおよび動作方法 | |
| EP3150107A1 (en) | Image processing device | |
| JP2015223221A (ja) | 画像強調処理システムおよび電子内視鏡システム | |
| JP2005020619A (ja) | X線画像表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210514 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220607 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221024 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230621 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20230629 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20230901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240816 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7552002 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |