JP7469514B2 - 薬剤カートリッジ、カセット、薬剤注入装置および薬剤注入システム - Google Patents
薬剤カートリッジ、カセット、薬剤注入装置および薬剤注入システム Download PDFInfo
- Publication number
- JP7469514B2 JP7469514B2 JP2022566863A JP2022566863A JP7469514B2 JP 7469514 B2 JP7469514 B2 JP 7469514B2 JP 2022566863 A JP2022566863 A JP 2022566863A JP 2022566863 A JP2022566863 A JP 2022566863A JP 7469514 B2 JP7469514 B2 JP 7469514B2
- Authority
- JP
- Japan
- Prior art keywords
- drug
- temperature
- information
- injection
- injection device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000003814 drug Substances 0.000 title claims description 534
- 229940079593 drug Drugs 0.000 title claims description 494
- 239000007924 injection Substances 0.000 title claims description 476
- 238000002347 injection Methods 0.000 title claims description 476
- 230000005540 biological transmission Effects 0.000 claims description 12
- 238000001514 detection method Methods 0.000 description 71
- 239000007788 liquid Substances 0.000 description 33
- 230000001133 acceleration Effects 0.000 description 32
- 238000010586 diagram Methods 0.000 description 21
- 239000007787 solid Substances 0.000 description 20
- 238000012546 transfer Methods 0.000 description 18
- 239000003990 capacitor Substances 0.000 description 16
- 230000007246 mechanism Effects 0.000 description 16
- 238000002156 mixing Methods 0.000 description 11
- 238000004891 communication Methods 0.000 description 9
- 230000035945 sensitivity Effects 0.000 description 9
- 230000007257 malfunction Effects 0.000 description 8
- 238000000034 method Methods 0.000 description 8
- 238000010926 purge Methods 0.000 description 8
- 238000005070 sampling Methods 0.000 description 8
- 230000005856 abnormality Effects 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 230000004044 response Effects 0.000 description 6
- 238000003860 storage Methods 0.000 description 6
- 230000007423 decrease Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000013022 venting Methods 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000004590 computer program Methods 0.000 description 3
- 230000007613 environmental effect Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 2
- 230000002542 deteriorative effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- 230000020169 heat generation Effects 0.000 description 2
- NOESYZHRGYRDHS-UHFFFAOYSA-N insulin Chemical compound N1C(=O)C(NC(=O)C(CCC(N)=O)NC(=O)C(CCC(O)=O)NC(=O)C(C(C)C)NC(=O)C(NC(=O)CN)C(C)CC)CSSCC(C(NC(CO)C(=O)NC(CC(C)C)C(=O)NC(CC=2C=CC(O)=CC=2)C(=O)NC(CCC(N)=O)C(=O)NC(CC(C)C)C(=O)NC(CCC(O)=O)C(=O)NC(CC(N)=O)C(=O)NC(CC=2C=CC(O)=CC=2)C(=O)NC(CSSCC(NC(=O)C(C(C)C)NC(=O)C(CC(C)C)NC(=O)C(CC=2C=CC(O)=CC=2)NC(=O)C(CC(C)C)NC(=O)C(C)NC(=O)C(CCC(O)=O)NC(=O)C(C(C)C)NC(=O)C(CC(C)C)NC(=O)C(CC=2NC=NC=2)NC(=O)C(CO)NC(=O)CNC2=O)C(=O)NCC(=O)NC(CCC(O)=O)C(=O)NC(CCCNC(N)=N)C(=O)NCC(=O)NC(CC=3C=CC=CC=3)C(=O)NC(CC=3C=CC=CC=3)C(=O)NC(CC=3C=CC(O)=CC=3)C(=O)NC(C(C)O)C(=O)N3C(CCC3)C(=O)NC(CCCCN)C(=O)NC(C)C(O)=O)C(=O)NC(CC(N)=O)C(O)=O)=O)NC(=O)C(C(C)CC)NC(=O)C(CO)NC(=O)C(C(C)O)NC(=O)C1CSSCC2NC(=O)C(CC(C)C)NC(=O)C(NC(=O)C(CCC(N)=O)NC(=O)C(CC(N)=O)NC(=O)C(NC(=O)C(N)CC=1C=CC=CC=1)C(C)C)CC1=CN=CN1 NOESYZHRGYRDHS-UHFFFAOYSA-N 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 102000018997 Growth Hormone Human genes 0.000 description 1
- 108010051696 Growth Hormone Proteins 0.000 description 1
- 102000004877 Insulin Human genes 0.000 description 1
- 108090001061 Insulin Proteins 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 229940124579 cold medicine Drugs 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000005336 cracking Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000004090 dissolution Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000003203 everyday effect Effects 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 238000005187 foaming Methods 0.000 description 1
- 239000000122 growth hormone Substances 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 229940125396 insulin Drugs 0.000 description 1
- 238000003475 lamination Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000002547 new drug Substances 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 238000003756 stirring Methods 0.000 description 1
Images



















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/20—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31533—Dosing mechanisms, i.e. setting a dose
- A61M5/31545—Setting modes for dosing
- A61M5/31546—Electrically operated dose setting, e.g. input via touch screen or plus/minus buttons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/28—Syringe ampoules or carpules, i.e. ampoules or carpules provided with a needle
- A61M5/284—Syringe ampoules or carpules, i.e. ampoules or carpules provided with a needle comprising means for injection of two or more media, e.g. by mixing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31511—Piston or piston-rod constructions, e.g. connection of piston with piston-rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31565—Administration mechanisms, i.e. constructional features, modes of administering a dose
- A61M5/31576—Constructional features or modes of drive mechanisms for piston rods
- A61M5/31583—Constructional features or modes of drive mechanisms for piston rods based on rotational translation, i.e. movement of piston rod is caused by relative rotation between the user activated actuator and the piston rod
- A61M5/31585—Constructional features or modes of drive mechanisms for piston rods based on rotational translation, i.e. movement of piston rod is caused by relative rotation between the user activated actuator and the piston rod performed by axially moving actuator, e.g. an injection button
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/24—Ampoule syringes, i.e. syringes with needle for use in combination with replaceable ampoules or carpules, e.g. automatic
- A61M2005/2403—Ampoule inserted into the ampoule holder
- A61M2005/2407—Ampoule inserted into the ampoule holder from the rear
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/24—Ampoule syringes, i.e. syringes with needle for use in combination with replaceable ampoules or carpules, e.g. automatic
- A61M2005/2485—Ampoule holder connected to rest of syringe
- A61M2005/2492—Ampoule holder connected to rest of syringe via snap connection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3368—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2209/00—Ancillary equipment
- A61M2209/08—Supports for equipment
- A61M2209/084—Supporting bases, stands for equipment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/28—Syringe ampoules or carpules, i.e. ampoules or carpules provided with a needle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/32—Needles; Details of needles pertaining to their connection with syringe or hub; Accessories for bringing the needle into, or holding the needle on, the body; Devices for protection of needles
- A61M5/3205—Apparatus for removing or disposing of used needles or syringes, e.g. containers; Means for protection against accidental injuries from used needles
- A61M5/321—Means for protection against accidental injuries by used needles
- A61M5/3243—Means for protection against accidental injuries by used needles being axially-extensible, e.g. protective sleeves coaxially slidable on the syringe barrel
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/10—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to drugs or medications, e.g. for ensuring correct administration to patients
- G16H20/17—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to drugs or medications, e.g. for ensuring correct administration to patients delivered via infusion or injection
Description
長手方向に延びる筒状のシリンダ柱状空間を有するシリンダと、
前記シリンダ柱状空間内において前記長手方向に移動可能に支持されるガスケットと、
前記シリンダ柱状空間内に保持された薬剤であって、少なくとも液体の第1成分を含む薬剤と、
前記シリンダの側面に配置された第1温度センサおよびRFタグと
を備えた薬剤カートリッジであって、
前記RFタグは、前記薬剤の種類を示す情報を少なくとも含む薬剤情報を記憶しており、外部からの指令に応じて、前記少なくとも前記薬剤の種類を示す情報および前記第1温度センサが検出した温度を示す第1温度情報を外部へ無線送信する、薬剤カートリッジ。
前記RFタグはパッシブ型である、項目1に記載の薬剤カートリッジ。
前記RFタグは、前記薬剤の使用期限を示す情報および前記薬剤の初期量を示す情報の少なくとも一方をさらに記憶している、項目1に記載の薬剤カートリッジ。
薬剤カートリッジを収納し、薬剤注入装置に装填されるカセットであって、
薬剤カートリッジの少なくとも一部を収納可能なカセット柱状空間、前記カセット柱状空間の先端に位置し、注射針の脱着が可能な注射針装着部、および、前記カセット柱状空間の後端に位置し、前記カセット柱状空間にアクセス可能な本体開口、を有するカセット本体と、
前記カセット本体の前記後端近傍において、前記本体開口を開閉可能に支持されたカセットキャップと、
前記カセット本体の前記注射針装着部を覆う第1位置と、前記注射針装着部を露出させる第2位置との間で回動可能なように、前記カセット本体に支持されたフード本体、および、前記フード本体に対して突出した突出位置と、前記フード本体に少なくとも一部が収納された収納位置との間で、前記フード本体に移動可能に支持された針隠し、および、前記針隠しを、前記突出位置の方向に付勢する付勢部材を含むフードと、
を備えたカセット。
前記針隠しの一部は透明である、項目4に記載のカセット。
前記針隠しは、透明な第1部分と、半透明な第2部分とを含む、項目5に記載のカセット。
前記フードは、前記回動の支点に対して、前記フード本体と反対側に延び、前記フード本体に接続された腕部を有する項目4から6のいずれか1つに記載のカセット。
第1温度センサおよびRFタグを有する薬剤カートリッジを収納したカセットの少なくとも一部、または、第1温度センサおよびRFタグを有し、カセットに収納されていない薬剤カートリッジの少なくとも一部を収納する筐体空間、および、前記筐体空間に連通する筐体開口を有する装置筐体と、
前記筐体空間内に移動可能なように支持されたピストンと、
前記ピストンを駆動するモータと、
前記モータを駆動する駆動信号を生成するモータドライバと、
前記筐体空間に隣接して配置されたアンテナと、
前記アンテナから電波を送信し、前記アンテナで受信した電波を受信するための送受信回路と、
注射の操作に関する情報を出力する表示装置と、
前記モータドライバ、前記送受信回路、および、前記表示装置を制御する制御装置と、を備え、
前記筐体空間に前記薬剤カートリッジが装填された状態において、前記制御装置は、前記送受信回路に、前記薬剤カートリッジのRFタグから送信される、前記薬剤カートリッジ内の薬剤の種類を示す情報を含む薬剤情報および前記第1温度センサが検出する第1温度情報を、前記アンテナを介して受信させ、前記第1温度情報に基づいた前記モータの駆動電力を決定し、前記決定した駆動電力を出力するように、前記モータドライバを制御する、薬剤注入装置。
第1温度センサおよびRFタグを有する薬剤カートリッジを収納したカセットの少なくとも一部、または、第1温度センサおよびRFタグを有し、カセットに収納されていない薬剤カートリッジの少なくとも一部を収納する筐体空間、および、前記筐体空間に連通する筐体開口を有する装置筐体と、
前記筐体空間内に移動可能なように支持されたピストンと、
前記ピストンを駆動するモータと、
前記モータを駆動する駆動信号を生成するモータドライバと、
前記筐体空間に隣接して配置されたアンテナと、
前記アンテナから電波を送信し、前記アンテナで受信した電波を受信するための送受信回路と、
複数の薬剤のそれぞれについての、前記モータを制御するための制御情報であって、各薬剤についての制御情報が、複数の温度範囲のそれぞれに対する前記モータの制御パラメータのセットを含む、制御情報が記憶されたメモリと、
注射の操作に関する情報を出力する表示装置と、
前記モータドライバ、前記送受信回路、前記メモリ、および、前記表示装置を制御する制御装置と、
を備えた薬剤注入装置。
前記RFタグは、少なくとも前記薬剤の種類を示す情報を含む薬剤情報を記憶しており、
前記筐体空間に前記薬剤カートリッジが装填された状態において、前記制御装置は、
前記送受信回路に前記アンテナを介して制御信号を送信させ、
前記アンテナを介して前記薬剤カートリッジの前記第1温度センサおよび前記RFタグから出力された、第1温度情報および薬剤情報を前記送受信回路に受信させ、
前記第1温度情報および薬剤情報に基づき、前記メモリに記憶された制御情報から、1つの制御パラメータセットを決定し、
前記決定した制御パラメータセットを用いて、前記モータ制御する、項目9に記載の薬剤注入装置。
前記モータドライバは、パルス幅変調による駆動信号を生成し、前記モータに出力する、項目10に記載の薬剤注入装置。
前記各薬剤についての制御情報において、前記モータの制御パラメータのセットの温度範囲の下限温度が高いほど、前記モータの制御パラメータセットの前記パルス幅変調による駆動信号のデューティー比は小さい、項目11に記載の薬剤注入装置。
前記各薬剤についての制御情報において、各温度範囲の前記モータの制御パラメータセットは、前記パルス幅変調による駆動信号のデューティー比の初期値および増加幅を含み、
前記制御装置は、前記モータに流れる電流が段階的に増大するように前記モータドライバに前記駆動信号を生成させる、項目11または12に記載の薬剤注入装置。
前記制御装置は、前記第1温度情報が第1温度未満または第2温度以上である第1温度範囲内にある場合、前記モータを駆動しない、項目10から13のいずれか1つに記載の薬剤注入装置。
前記制御装置は、前記第1温度情報が、第1温度以上であり、かつ前記第2温度よりも低い第3温度未満である第2温度範囲内にある場合、注射を待機することを示す情報を表示するように前記表示装置を制御する、項目14に記載の薬剤注入装置。
前記制御装置は、前記第1温度情報が、前記第3温度以上前記第2温度未満である第3温度範囲内にある場合、注射可能であることを示す情報を表示するように表示装置を制御する、項目15に記載の薬剤注入装置。
前記装置筐体内に設けられ、前記装置筐体内の温度を示す第2温度情報を出力する第2温度センサを更に備えた項目15に記載の薬剤注入装置。
前記制御装置は、前記第2温度情報が所定の温度以上である場合、所定の時間間隔で前記第1温度情報を逐次取得し、前記第1温度情報および前記第2温度情報に基づき、注射可能となるまでの予測時間を逐次算出し、前記算出した予測時間を示す情報を表示するように表示装置を制御する、項目17に記載の薬剤注入装置。
前記アンテナは、それぞれが独立して外部からの信号を受信可能な第1部分および第2部分を含み、
前記第1部分および前記第2部分は、前記筐体空間に隣接し直交して配置されている、項目8から18のいずれか1つに記載の薬剤注入装置。
注射ボタンを含む、操作者からの指令を受け付けるユーザインターフェースと、
表面チャージ転送方式のタッチセンサと、
を更に含み、
前記装置筐体は、注射時に操作者の皮膚と当接する皮膚あて面を有し、
前記タッチセンサは前記皮膚あて面に配置されている、項目8から19のいずれか1つに記載の薬剤注入装置。
前記制御装置は、
前記タッチセンサから皮膚の接触による検出信号を受け取っている状態で、前記注射ボタンの押下による信号を受け取った場合、注入動作を行うように前記モータドライバを制御し、
前記注入動作中、前記タッチセンサが皮膚の離隔を検出した場合、
前記表示装置に、異常を示す情報を表示させる、項目20に記載の薬剤注入装置。
互いに直交する第1、第2及び第3軸を有し、軸に沿った加速度または軸周りの角度を検出するセンサであって、前記第1、第2及び第3軸の1つが前記ピストンの移動方向と一致するように筐体内に配置されたセンサをさらに備え、
前記制御装置は、前記センサの検出信号に基づき、前記表示装置に前記薬剤注入装置の姿勢に関する情報を表示させる、項目8から21のいずれか1つに記載の薬剤注入装置。
前記モータの回転軸に取り付けられたエンコーダプレートと、パルスエンコーダとを含むロータリーエンコーダをさらに備え、
前記エンコーダプレートは、円周上に配置され、それぞれが切り欠きおよび羽根を有する、1つの基準羽根部分と、複数の通常羽根部分とを含み、
前記複数の通常羽根部分の羽根の円周方向の長さは互いに等しく、かつ、前記複数の通常羽根部分の切り欠きの円周方向の長さは互いに等しく、
前記基準羽根部分の羽根の円周方向の長さおよび切り欠きの円周方向の長さは、前記複数の通常羽根部分の羽根の円周方向の長さおよび切り欠きの円周方向の長さとそれぞれ異なり、
前記パルスエンコーダは、発光素子と、前記発光素子から出射する光が入射するように配置された受光素子とを含み、前記モータの回転に一致して回転する前記エンコーダプレートの前記基準羽根部分および前記複数の通常羽根部分が前記発光素子と前記受光素子との間の光路を横切ることによって、前記基準羽根部分の羽根に対応するパルスおよび前記複数の通常羽根部分の羽根に対応するパルスを含むパルス信号を生成する、項目8から22のいずれか1つに記載の薬剤注入装置。
前記基準羽根部分の羽根の円周方向の長さは前記通常羽根部分の羽根の円周方向の長さよりも大きく、かつ、前記基準羽根部分の切り欠きの円周方向の長さは前記通常羽根部分の切り欠きの円周方向の長さよりも小さい、項目23に記載の薬剤注入装置。
前記制御装置は、前記パルス信号に基づき、前記モータドライバを制御する、項目23または24に記載の薬剤注入装置。
前記制御装置は、前記パルス信号に基づき、前記エンコーダプレート1回転あたりの、前記基準羽根部分の羽根および前記複数の通常羽根部分の羽根の数を算出し、前記算出結果が所定の値と異なる場合に、前記表示装置に故障を示す情報を表示させる、項目23から25のいずれか1つに記載の薬剤注入装置。
前記制御装置は、前記センサの検出信号に基づき、前記表示装置に表示する情報の向きを上下反転させる、項目22に記載の薬剤注入装置。
前記制御装置は、
前記薬剤情報を前記表示装置に表示させる、項目8から27のいずれか1つに記載の薬剤注入装置。
前記制御装置は、
前記薬剤の種類に対応したテーマ色を複数の操作画面に共通して表示させる、項目8から28のいずれか1つに記載の薬剤注入装置。
前記装置筐体は、長手方向に延びる凸部と、凸部の上面に位置する皮膚あて面と、前記皮膚あて面に隣接し、底部に前記筐体開口が位置する装置凹部と、前記筐体開口を覆い、前記薬剤カートリッジの先端が挿入される内空間を備えた注射針装着部とを含む先端部を備え、
前記筐体空間は、カセットに収納されていない薬剤カートリッジの少なくとも一部を収納するように適合しており、
前記装置凹部に位置し前記装置筐体に対して回動可能に取り付けられ、フード本体、前記フード本体に対して移動可能に支持された針隠し、および、前記針隠しを、前記突出位置の方向に付勢する付勢部材を含むフードをさらに備え、
前記フードは、前記注射針装着部を覆う第1位置と、前記注射針装着部を露出させる第2位置との間で回動可能である、項目8または9に記載の薬剤注入装置。
項目4から7のいずれか1つに記載のカセットと、
項目8から29のいずれか1つに記載の薬剤注入装置と
を備えた薬剤注入システム。
項目1から3のいずれか1つに記載の薬剤カートリッジをさらに備え、
前記薬剤カートリッジは、前記カセットの前記カセット柱状空間に収納されている、項目31に記載の薬剤注入システム。
項目1から3のいずれか1つに記載の薬剤カートリッジと、
前記薬剤カートリッジの少なくとも一部が収納されたカセット柱状空間を含むカセットと、
項目8から29のいずれか1つに記載の薬剤注入装置と
を備えた薬剤注入システム。
前記薬剤注入装置は、
二次電池と、
前記装置筐体に設けられた充電用端子と、
を備え、
前記装置筐体は、長手方向に延びる凸部と、凸部の上面に位置する皮膚あて面と、前記皮膚あて面に隣接する装置凹部とを含む先端部を備え、前記筐体開口は前記装置凹部の底面に位置しており、
前記薬剤注入装置の筐体空間に前記カセットが装填された状態において、前記カセットの前記フードの一部は、前記装置筐体の凹部において外部に露出し、前記フードの他の一部は、前記装置筐体内に位置することによって、前記フードは、回動不能である、項目31または32に記載の薬剤注入システム。
前記薬剤注入装置の前記二次電池を充電するための電源回路と、前記電源回路を収納した充電器筐体とを含む充電器をさらに備え、
前記充電器筐体は、前記薬剤注入装置の前記先端部分が挿入可能な空間を有する充電器凹部と、前記充電器凹部の底部に設けられ、前記薬剤注入装置の前記筐体凹部に対応した形状を有する段差と、前記凹部内に位置し、前記電源回路に接続された供給端子とを含み、
前記充電器筐体は、前記カセットが前記薬剤注入装置に装填されていない状態で、前記薬剤注入装置の前記充電用端子が、前記供給端子と接するように、前記薬剤注入装置の前記先端部を前記充電器凹部内に収納可能であり、前記カセットが前記薬剤注入装置に装填された状態では、前記カセットが、前記充電器筐体の前記段差と干渉することによって、前記薬剤注入装置の前記先端部を前記充電器凹部内に収納不能である、項目34に記載の薬剤注入システム。
(薬剤注入システムの概略)
図1は、カセット100と、薬剤注入装置200と、充電器300とを備える薬剤注入システム400の外観を示す斜視図である。カセット100は、薬剤カートリッジ10を収納する。図2(a)から図2(c)は、薬剤カートリッジ10のカセット100への収納を説明する斜視図であり、図3(a)から図3(c)は、カセット100の薬剤注入装置200への収納を説明する斜視図である。図4(a)、図4(b)は、注射を行う状態を説明する斜視図である。図5は、薬剤注入装置200の電気回路の構成例を示すブロック図である。これらの図を参照しながら、薬剤注入システムの概略を説明する。なお、本開示の薬剤注入システムは、典型的には患者が自分で注射を行うために使用される。しかし、患者の年齢が低く、患者本人が薬剤注入システムを取り扱うのが適切ではない場合には、保護者等患者以外の者が薬剤注入システムを取り扱ってもよい。
本実施形態の薬剤カートリッジ10の一例を説明する。図7Aは薬剤カートリッジ10の長手方向に平行な断面であり、図7Bは薬剤カートリッジ10の長手方向に垂直な断面である。薬剤カートリッジ10は、シリンダ11と、シリンダキャップ12と、ガスケット13と、薬剤14と、RFタグ16とを含む。
図2を参照して説明したように、カセット100は、カセット本体110と、カセットキャップ130と、フード140とを含む。本実施形態のカセット100はフード140を備えることによって、注射針21が装着された状態で、操作者がより安全にカセット100あるいはカセット100が装着された薬剤注入装置200を取り扱うことが可能となる。
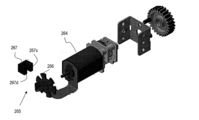
図13は、薬剤注入装置200の装置筐体201を取り外した分解斜視図であり、図14はRF-IDアンテナの配置を示した薬剤注入装置200の斜視図である。図15は、薬剤注入装置200のピストン駆動機構220の分解斜視図である。薬剤注入装置200は、前述した装置筐体201および制御装置280に加えて、ピストン210と、ピストン駆動機構220とを備える。本実施形態では、薬剤注入装置200は、内部筐体202と、メインボード290と、第1サブボード291と、第2サブボード292とをさらに備える。内部筐体202は、ピストン駆動機構220を支持する。メインボード290には、制御装置280およびモータドライバ263が形成されている。また、メインボード290には加速度センサ276も配置されている。
前述したようにRF-IDリーダ277は、アンテナ278と送受信回路279とを含む。図14に示すように、アンテナ278は、それぞれが独立して外部からの信号を受信可能な第1部分278Aおよび第2部分278Bを含む。アンテナ278の第1部分278Aおよび第2部分278Bは、筐体空間201cに隣接して配置されている。第1部分278Aおよび第2部分278Bは、それぞれ概ね平面状の放射導体を含み、互いに直交して配置されていることが好ましい。
図14および図15を参照する。ピストン210は、先端部211と先端部211に接続された本体212とを含む。先端部211は、第1端210a側に位置している。先端部211は、本実施形態では、円柱を軸に沿った2つの平行な2平面で切断したIカット形状を有している。先端部211は、カセット100のカセットキャップ130に設けられたキャップ開口130dに対応した形状を有している。
前述したように液体の薬剤14の粘度は温度によって変化する。一般に、薬剤の温度が高いほど、粘度は小さくなる。また、薬剤の種類によって粘度は異なる。さらに、同じ薬剤が薬剤カートリッジに収納されていても、シリンダ11の容量が異なることによって、シリンダ11の直径が異なると、ガスケット13を移動させるのに要する負荷が異なり得る。従来の薬剤注入装置では、薬剤の種類や薬剤カートリッジ10の容量によらず、円滑な注入動作を行うことが可能なように、対応している薬剤および薬剤カートリッジのうち、最も粘度が高い薬剤および最も負荷が大きい薬剤カートリッジに対応可能な十分に高い駆動電圧をモータに供給していた。しかし、この場合、最大出力が大きな二次電池を用いる必要がある。このため二次電池の容積も大きくなり、薬剤注入装置が大型になったり、重くなったりする。また、常に必要以上の電力でモータを駆動するため、消費電力が大きくなってしまう。


(1) 第2温度情報が25℃以上30℃未満の場合


図1および図13に示すように、薬剤注入装置200の凸部201tの皮膚あて面201eにはタッチセンサ275が配置されている。これにより、皮膚あて面201eが確実に皮膚と接触している状態を検出することができ、注射時に針22が皮膚から完全に離れてしまう前に薬剤注入装置200のぐらつき等の不適切な保持状態を検出することができる。以下、タッチセンサ275を詳細に説明する。
本実施形態の薬剤注入装置200は加速度センサ276を備えている。これにより、薬剤注入装置200の姿勢を検出することができ、操作者に薬剤注入装置200の姿勢を変えるように促すことが可能となる。
ロータリーエンコーダ265はモータ264の回転数(駆動量)を検出する。モータ264の回転数によって注入する薬剤の量が設定されるため、モータ264の回転数を正確に測定することは重要であり、このためには、ロータリーエンコーダ265が正確に測定できることが重要である。本実施形態のロータリーエンコーダ265は、それ自身が故障した場合に故障を正しく検出し得る構造を備えている。


薬剤注入装置200が備える前述した種々の検出デバイスから得られる情報は、表示装置259に表示させたり、検出デバイスを用いた薬剤注入装置200の操作を操作者に促すための情報を表示装置259に表示させたりすることができる。以下、制御装置280が表示装置259に表示させる画像の例を説明する。
本開示の薬剤注入装置は、カセット100を利用せず、薬剤カートリッジ10を直接収納するように構成されていてもよい。以下図面を参照しながら、カセット100を利用しない薬剤注入装置500を備える薬剤注入システムの実施形態を説明する。
上記実施形態は本開示の薬剤注入装置の一例であり、種々の改変が可能である。図示した薬剤カートリッジ10、カセット100、薬剤注入装置200、充電器300やそれらを構成する部品の形状は一例であって、他の形状を備えていてもよい。薬剤注入装置200は、各種センサをすべて備えていなくてもよい。また、フローチャートを参照して説明した薬剤の温度に応じた注射動作、空気抜き動作、混合動作などは一例であって、工程の一部が省略されていたり、他の順序で実行されたり、他の工程を含んでいてもよい。
11 シリンダ
11’ シリンダ
11a 第1端
11b 第2端
11c シリンダ柱状空間
11c1 第1領域
11c2 第2領域
11c3 第3領域
11d シリンダ開口
11e バイパス空間
11h 角
11j 軸
11t 突出部
12 シリンダキャップ
13 ガスケット
13A 第1ガスケット
13B 第2ガスケット
14 薬剤
14A 液体成分
14B 固体成分
15 第1温度センサ
16、16’ RFタグ
16a アンテナ
17 ラベル
20 針ユニット
20a 先端
20c 筐体空間
20t 凸部
21 注射針
22 針
23 接続部
24 針キャップ
25 針ケース
31 充電筐体
100 カセット
110 カセット本体
110a 先端
110b 後端
110c カセット柱状空間
110e 本体開口
110h、110h’ 注射針装着部
130 カセットキャップ
130d キャップ開口
140,140’ フード
141 フード本体
141b 後端
141c 腕部
142 針隠し
142c 第1部分
142d 第2部分
143 付勢部材
200 薬剤注入装置
200a 先端部
201 装置筐体
201a 先端部
201c、201c’ 筐体空間
201d 筐体開口
201e 皮膚あて面
201g 充電用端子
201r 凹部
201t 凸部
202 内部筐体
202d ギア領域
202f ピストンガイド領域
202g 凸部
202h カセット領域
203 第1ガイド
204 カートリッジホルダ
204c ドア部
204d ホルダ部
209 排出レバー
210 ピストン
210a 第1端
210b 第2端
210h 穴
211 先端部
212 本体
213 駆動凸部
214 雌ネジ
220 ピストン駆動機構
221 ギアボックス
222 駆動ギア
223 ベアリング
230 ピストンガイド
230g 溝
230h 穴
231 ガイド
235 駆動ロッド
236 雄ねじ
251 制御部
252 充電部
253 二次電池
254 メモリ
255 電源ボタン
256 選択ボタン
257 決定ボタン
258 注射ボタン
259 表示装置
260 ブザー
261 クロック
262 通信部
263 モータドライバ
264 モータ
265 ロータリーエンコーダ
266 エンコーダプレート
266N 通常羽根部分
266Nc 切り欠き
266Nf 羽根
266S 基準羽根部分
266Sc 切り欠き
266Sf 羽根
267 パルスエンコーダ
267c 発光素子
267d 受光素子
270C 送受信回路
271 ピストン原点検出器
272 カセット装填検出器
273 第2温度センサ
274 排出レバー検出器
275 タッチセンサ
276 加速度センサ
277 RF-IDリーダ
278 アンテナ
278A 第1部分
278B 第2部分
279 送受信回路
280 制御装置
281 故障判定器
282 羽根情報取得部
283 破断検出部
284 速度安定判定部
285 基準羽根検出部
286 羽根枚数検出部
287 検出部
290 メインボード
291 第1サブボード
292 第2サブボード
300 充電器
301 充電筐体
301d リブ
301e 供給端子
301r 充電器凹部
301s 段差
301u 空間
310 画像
310a、311a、312a 第1領域
310b 第2領域
310c 第3領域
311、312、313 画像
400 薬剤注入システム
Claims (5)
- 第1温度センサおよびRFタグを有する薬剤カートリッジを収納したカセットの少なくとも一部、または、第1温度センサおよびRFタグを有し、カセットに収納されていない薬剤カートリッジの少なくとも一部を収納する筐体空間、および、前記筐体空間に連通する筐体開口を有する装置筐体と、
前記筐体空間内に移動可能なように支持されたピストンと、
前記ピストンを駆動するモータと、
前記モータを駆動する駆動信号を生成するモータドライバと、
前記筐体空間に隣接して配置されたアンテナと、
前記アンテナから電波を送信し、前記アンテナで受信した電波を受信するための送受信回路と、
複数の薬剤のそれぞれについての、前記モータを制御するための制御情報であって、各薬剤についての制御情報が、複数の温度範囲のそれぞれに対する前記モータの制御パラメータのセットを含む、制御情報が記憶されたメモリと、
注射の操作に関する情報を出力する表示装置と、
前記モータドライバ、前記送受信回路、前記メモリ、および、前記表示装置を制御する制御装置と、
を備えた薬剤注入装置であって、
前記RFタグは、少なくとも前記薬剤の種類を示す情報を含む薬剤情報を記憶しており、
前記筐体空間に前記薬剤カートリッジが装填された状態において、前記制御装置は、前記送受信回路に前記アンテナを介して制御信号を送信させ、
前記アンテナを介して前記薬剤カートリッジの前記第1温度センサおよび前記RFタグから出力された、第1温度情報および薬剤情報を前記送受信回路に受信させ、
前記第1温度情報および薬剤情報に基づき、前記メモリに記憶された制御情報から、1つの制御パラメータセットを決定し、
前記決定した制御パラメータセットを用いて、前記モータを制御し、
前記制御装置は、前記第1温度情報が第1温度未満または前記第1温度より高い第2温度以上である第1温度範囲内にある場合、前記モータを駆動せず、
前記制御装置は、前記第1温度情報が、前記第1温度以上であり、かつ前記第2温度よりも低い第3温度未満である第2温度範囲内にある場合、注射を待機することを希望するかどうかをユーザに選択させる表示をするように前記表示装置を制御し、
前記薬剤注入装置は、前記装置筐体内に設けられ、前記装置筐体内の温度を示す第2温度情報を出力する第2温度センサを更に備え、
前記制御装置は、前記第2温度情報が所定の温度以上である場合、所定の時間間隔で前記第1温度情報を逐次取得し、注射可能となるまでの予測時間を逐次算出し、前記算出した予測時間を示す情報を表示するように前記表示装置を制御し、
前記制御装置は、前記第2温度情報が前記所定の温度未満の場合、前記予測時間の算出を行わず、注射が出来ない旨を表示するように前記表示装置を制御する、薬剤注入装置。 - 前記制御装置は、前記第1温度センサが逐次取得する連続する前後の温度の差が所定の温度差以下である場合、注射可能となるまでの前記予測時間を算出する、請求項1に記載の薬剤注入装置。
- 前記制御装置は、前記第1温度情報が、前記第3温度以上前記第2温度未満である第3温度範囲内にある場合、注射可能であることを示す情報を表示するように前記表示装置を制御する、請求項1または2に記載の薬剤注入装置。
- 前記制御装置は、前記予測時間を携帯機器に送信し、前記携帯機器に前記予測時間を表示させる、請求項1から3のいずれか1項に記載の薬剤注入装置。
- 前記制御装置は、前記第1温度情報が前記第3温度に達した場合、適温になった旨を表示するように前記表示装置を制御する、請求項1から4のいずれか1項に記載の薬剤注入装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020199996 | 2020-12-02 | ||
| JP2020199996 | 2020-12-02 | ||
| PCT/JP2021/043006 WO2022118712A1 (ja) | 2020-12-02 | 2021-11-24 | 薬剤カートリッジ、カセット、薬剤注入装置および薬剤注入システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022118712A1 JPWO2022118712A1 (ja) | 2022-06-09 |
| JPWO2022118712A5 JPWO2022118712A5 (ja) | 2023-05-11 |
| JP7469514B2 true JP7469514B2 (ja) | 2024-04-19 |
Family
ID=81853532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022566863A Active JP7469514B2 (ja) | 2020-12-02 | 2021-11-24 | 薬剤カートリッジ、カセット、薬剤注入装置および薬剤注入システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230321353A1 (ja) |
| EP (1) | EP4257166A1 (ja) |
| JP (1) | JP7469514B2 (ja) |
| CN (1) | CN116209488A (ja) |
| WO (1) | WO2022118712A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015514524A (ja) | 2012-04-24 | 2015-05-21 | サノフィ−アベンティス・ドイチュラント・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング | 医用自動注射デバイスに使用されるニードル・シールドおよびデータ記憶デバイスを有するシリンジ・キャリヤ |
| JP2016534788A (ja) | 2013-10-30 | 2016-11-10 | サノフィ−アベンティス・ドイチュラント・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング | モータ巻線の抵抗測定を含む装置、およびそのような装置を制御する方法 |
| JP2017531459A (ja) | 2014-08-28 | 2017-10-26 | ユニトラクト シリンジ プロプライエタリイ リミテッドUnitract Syringe Pty Ltd | 薬剤送達デバイス用センサシステム |
| JP2020506760A (ja) | 2017-01-26 | 2020-03-05 | サノフィ−アベンティス・ドイチュラント・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング | 注射デバイス向けのフレキシブルモジュール |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06227062A (ja) * | 1993-02-04 | 1994-08-16 | Seiko Epson Corp | シリアルプリンタ及びシリアルプリンタの制御方法 |
| JPH09154944A (ja) * | 1995-12-01 | 1997-06-17 | Terumo Corp | 医療用ポンプ |
| JPH10198972A (ja) * | 1997-01-14 | 1998-07-31 | Nippon Columbia Co Ltd | 多層構造光ディスク媒体記録再生装置および光ディスク媒体 |
| US7264148B2 (en) * | 2001-09-12 | 2007-09-04 | Terumo Kabushiki Kaisha | Drug container and drug infusion device comprising the same |
| US10058655B2 (en) * | 2011-11-22 | 2018-08-28 | Sanofi-Aventis Deutschland Gmbh | Pen-type drug injection device with controller and time lock-out mechanism for its drive |
| JP6698105B2 (ja) * | 2015-12-24 | 2020-05-27 | Phcホールディングス株式会社 | 薬剤注入装置、カートリッジアダプタおよび薬剤注入システム |
| AU2018294519B2 (en) * | 2017-06-29 | 2023-10-12 | Ascendis Pharma A/S | Auto injector with reconstitution handling support |
| JP7009190B2 (ja) * | 2017-12-06 | 2022-01-25 | Phcホールディングス株式会社 | 薬剤注入システム |
| RS63595B1 (sr) * | 2018-10-03 | 2022-10-31 | Lilly Co Eli | Sistemi za detekciju statusa unutar sklopa uređaja za ubrizgavanje |
-
2021
- 2021-11-24 JP JP2022566863A patent/JP7469514B2/ja active Active
- 2021-11-24 US US18/023,230 patent/US20230321353A1/en active Pending
- 2021-11-24 CN CN202180053149.4A patent/CN116209488A/zh active Pending
- 2021-11-24 EP EP21900467.8A patent/EP4257166A1/en active Pending
- 2021-11-24 WO PCT/JP2021/043006 patent/WO2022118712A1/ja unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015514524A (ja) | 2012-04-24 | 2015-05-21 | サノフィ−アベンティス・ドイチュラント・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング | 医用自動注射デバイスに使用されるニードル・シールドおよびデータ記憶デバイスを有するシリンジ・キャリヤ |
| JP2016534788A (ja) | 2013-10-30 | 2016-11-10 | サノフィ−アベンティス・ドイチュラント・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング | モータ巻線の抵抗測定を含む装置、およびそのような装置を制御する方法 |
| JP2017531459A (ja) | 2014-08-28 | 2017-10-26 | ユニトラクト シリンジ プロプライエタリイ リミテッドUnitract Syringe Pty Ltd | 薬剤送達デバイス用センサシステム |
| JP2020506760A (ja) | 2017-01-26 | 2020-03-05 | サノフィ−アベンティス・ドイチュラント・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング | 注射デバイス向けのフレキシブルモジュール |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230321353A1 (en) | 2023-10-12 |
| CN116209488A (zh) | 2023-06-02 |
| WO2022118712A1 (ja) | 2022-06-09 |
| JPWO2022118712A1 (ja) | 2022-06-09 |
| EP4257166A1 (en) | 2023-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11948671B2 (en) | Intelligent accessories for medicine dispensing device | |
| ES2683700T3 (es) | Sistemas y métodos de gestión de administración de fármacos | |
| RU2762331C2 (ru) | Автоматический инъектор с поддержкой манипуляций по восстановлению препарата | |
| CA2634831C (en) | Methods to pair a medical device and at least a remote controller for such medical device | |
| US8449523B2 (en) | Method of operating a medical device and at least a remote controller for such medical device | |
| ES2912584T3 (es) | Un sistema y procedimiento de monitorización de glucosa | |
| US8932250B2 (en) | Systems and methods to pair a medical device and a remote controller for such medical device | |
| JP6407715B2 (ja) | 薬剤用量レジメンを経時的に最適化するためのシステム | |
| EP3053279A1 (en) | Methods for secure communication and pairing of a medical infusion device and a remote controller for such medical device | |
| JP7469514B2 (ja) | 薬剤カートリッジ、カセット、薬剤注入装置および薬剤注入システム | |
| US20220387724A1 (en) | Haptic Feedback of an Electronic Medical Device | |
| EA039706B1 (ru) | Устройство для инъекций | |
| WO2023235866A2 (en) | Medication delivery devices, systems and methods | |
| CN117205400A (zh) | 注射键、带有皮肤接触检测功能的注射装置及其控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240404 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7469514 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |